R O C ES SIN G I N M EM S S EN SO R -B A SE D M O TIO N A N A LY SI S S YS TE M S 20 19 ISBN 978-91-7485-421-3 ISSN 1651-4238
Address: P.O. Box 883, SE-721 23 Västerås. Sweden Address: P.O. Box 325, SE-631 05 Eskilstuna. Sweden E-mail: info@mdh.se Web: www.mdh.se
REAL-TIME SIGNAL PROCESSING IN MEMS
SENSOR-BASED MOTION ANALYSIS SYSTEMS
Jiaying Du
2019
School of Innovation, Design and Engineering
REAL-TIME SIGNAL PROCESSING IN MEMS
SENSOR-BASED MOTION ANALYSIS SYSTEMS
Jiaying Du
2019
Copyright © Jiaying Du, 2019 ISBN 978-91-7485-421-3 ISSN 1651-4238
Printed by E-Print AB, Stockholm, Sweden
Copyright © Jiaying Du, 2019 ISBN 978-91-7485-421-3 ISSN 1651-4238
No. 285
REAL-TIME SIGNAL PROCESSING IN MEMS SENSOR-BASED MOTION ANALYSIS SYSTEMS
Jiaying Du
Akademisk avhandling
som för avläggande av teknologie doktorsexamen i elektronik vid Akademin för innovation, design och teknik kommer att offentligen försvaras tisdagen
den 19 mars 2019, 09.30 i Gamma, Mälardalens högskola, Västerås.
Fakultetsopponent: Docent Helena Grip, Norrlands universitetssjukhus/Umeå University
Akademin för innovation, design och teknik
No. 285
REAL-TIME SIGNAL PROCESSING IN MEMS SENSOR-BASED MOTION ANALYSIS SYSTEMS
Jiaying Du
Akademisk avhandling
som för avläggande av teknologie doktorsexamen i elektronik vid Akademin för innovation, design och teknik kommer att offentligen försvaras tisdagen
den 19 mars 2019, 09.30 i Gamma, Mälardalens högskola, Västerås.
Fakultetsopponent: Docent Helena Grip, Norrlands universitetssjukhus/Umeå University
This PhD thesis focuses on real-time signal processing for hardware-limited micro-electro-mechanical system (MEMS) sensor-based human motion analysis systems. The aim of the thesis is to improve the signal quality of MEMS gyroscopes and accelerometers by minimizing the effects of signal errors, considering the hardware limitations and the users' perception.
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are important components in motion analysis systems. They are known for their small size, light weight, low power consumption, low cost, and high sensitivity. This makes them suitable for wearable systems for measuring body movements. The data can further be used as input for advanced human motion analyses. However, MEMS sensors are usually sensitive to environmental disturbances such as shock, vibration, and temperature change. A large portion of the MEMS sensor signals actually originate from error sources such as noise, offset, null drift and temperature drift, as well as integration drift. Signal processing is regarded as the major key solution to reduce these errors. For real-time signal processing, the algorithms need to be executed within a certain specified time limit. Two crucial factors have to be considered when designing real-time signal processing algorithms for wearable embedded sensor systems. One is the hardware limitations leading to a limited calculation capacity, and the other is the user perception of the delay caused by the signal processing.
Within this thesis, a systematic review of different signal error reduction algorithms for MEMS gyroscope-based motion analysis systems for human motion analysis is presented. The users’ perceptions of the delay when using different computer input devices were investigated. 50 ms was found as an acceptable delay for the signal processing execution in a real-time motion analysis system. Real-time algorithms for noise reduction, offset/drift estimation and reduction, improvement of position accuracy and system stability considering the above mentioned requirements, are presented in this thesis. The algorithms include a simplified high-pass filter and low-pass filter, a LMS algorithm, a Kalman filter, a WFLC algorithm, two simple novel algorithms (a TWD method and a velocity drift estimation method), and a novel combination method KWT. Kalman filtering was found to be efficient to reduce the problem of temperature drift and the WFLC algorithm was found the most suitable method to reduce human physiological tremor and electrical noise. The TWD method resulted in a signal level around zero without interrupting the continuous movement signal. The combination method improved the static stability and the position accuracy considerably. The computational time for the execution of the algorithms were all perceived as acceptable by users and kept within the specified time limit for real-time performance. Implementations and experiments showed that these algorithms are feasible for establishing high signal quality and good system performance in previously developed systems, and also have the potential to be used in similar systems.
ISBN 978-91-7485-421-3 ISSN 1651-4238
This PhD thesis focuses on real-time signal processing for hardware-limited micro-electro-mechanical system (MEMS) sensor-based human motion analysis systems. The aim of the thesis is to improve the signal quality of MEMS gyroscopes and accelerometers by minimizing the effects of signal errors, considering the hardware limitations and the users' perception.
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are important components in motion analysis systems. They are known for their small size, light weight, low power consumption, low cost, and high sensitivity. This makes them suitable for wearable systems for measuring body movements. The data can further be used as input for advanced human motion analyses. However, MEMS sensors are usually sensitive to environmental disturbances such as shock, vibration, and temperature change. A large portion of the MEMS sensor signals actually originate from error sources such as noise, offset, null drift and temperature drift, as well as integration drift. Signal processing is regarded as the major key solution to reduce these errors. For real-time signal processing, the algorithms need to be executed within a certain specified time limit. Two crucial factors have to be considered when designing real-time signal processing algorithms for wearable embedded sensor systems. One is the hardware limitations leading to a limited calculation capacity, and the other is the user perception of the delay caused by the signal processing.
Within this thesis, a systematic review of different signal error reduction algorithms for MEMS gyroscope-based motion analysis systems for human motion analysis is presented. The users’ perceptions of the delay when using different computer input devices were investigated. 50 ms was found as an acceptable delay for the signal processing execution in a real-time motion analysis system. Real-time algorithms for noise reduction, offset/drift estimation and reduction, improvement of position accuracy and system stability considering the above mentioned requirements, are presented in this thesis. The algorithms include a simplified high-pass filter and low-pass filter, a LMS algorithm, a Kalman filter, a WFLC algorithm, two simple novel algorithms (a TWD method and a velocity drift estimation method), and a novel combination method KWT. Kalman filtering was found to be efficient to reduce the problem of temperature drift and the WFLC algorithm was found the most suitable method to reduce human physiological tremor and electrical noise. The TWD method resulted in a signal level around zero without interrupting the continuous movement signal. The combination method improved the static stability and the position accuracy considerably. The computational time for the execution of the algorithms were all perceived as acceptable by users and kept within the specified time limit for real-time performance. Implementations and experiments showed that these algorithms are feasible for establishing high signal quality and good system performance in previously developed systems, and also have the potential to be used in similar systems.
ISBN 978-91-7485-421-3 ISSN 1651-4238
Sammanfattning
Denna doktorsavhandling fokuserar på realtidssignalbehandling av inbyggda mikroelektromekaniska system (MEMS)-sensorsystem för rörelseranalys med hårdvarubegränsningar. Syftet med avhandlingen är att förbättra signalkvalit-eten hos MEMS-gyroskop och accelerometrar genom att minska felkällornas inflytande, med hänsyn tagen till hårdvarubegränsningarna och användarnas upplevelse.
MEMS-sensorer, såsom MEMS-gyroskop och MEMS-accelerometrar ut-gör viktiga komponenter i rörelseanalyssystem. De kännetecknas av sin ringa storlek, låga vikt, låga energiförbrukning, låga kostnad och höga känslighet. Detta gör dem lämpliga att användas i bärbara system, avsedda att mäta kropp-srörelser. Datat kan vidare användas som insignal för avancerad rörelseanalys. MEMS-sensorer är dock ofta känsliga för miljöstörningar, såsom stötar, vibra-tion och temperaturförändring. En stor del av den uppmätta MEMS-sensorsig-nalen kommer i själva verket från felkällor såsom brus, offset, null drift och temperaturdrift, samt integrationsdrift. Signalbehandling anses vara den vik-tigaste metoden för att minska dessa fel. För realtidssignalbehandling måste algoritmerna utföras inom en viss angiven tidsgräns. Två avgörande faktorer måste beaktas vid utformning av realtidssignalbehandlingsalgoritmer för bär-bara inbyggda sensorsystem. En utgörs av hårdvarubegränsningar, som leder till en begränsad beräkningskapacitet, och den andra utgörs av användarnas upplevelse av fördröjningen på grund av signalbehandlingen.
I denna avhandling presenteras en systematisk review över olika signalbe-handlingsalgoritmer för att minska felkällorna för MEMS-gyroskopbaserade rörelseanalyssystem. Användarnas upplevelse av fördröjning vid användnin-g av olika inmatninanvändnin-gsenheter till datorer har undersökts. 50 ms utgjorde en acceptabel fördröjning för signalbehandlingsexekveringen i ett realtids-rörelseanalyssystem. I denna avhandling presenteras också realtidsalgoritmer för brusreducering, offset-/driftestimering och reducering, förbättring av
po-i
Sammanfattning
Denna doktorsavhandling fokuserar på realtidssignalbehandling av inbyggda mikroelektromekaniska system (MEMS)-sensorsystem för rörelseranalys med hårdvarubegränsningar. Syftet med avhandlingen är att förbättra signalkvalit-eten hos MEMS-gyroskop och accelerometrar genom att minska felkällornas inflytande, med hänsyn tagen till hårdvarubegränsningarna och användarnas upplevelse.
MEMS-sensorer, såsom MEMS-gyroskop och MEMS-accelerometrar ut-gör viktiga komponenter i rörelseanalyssystem. De kännetecknas av sin ringa storlek, låga vikt, låga energiförbrukning, låga kostnad och höga känslighet. Detta gör dem lämpliga att användas i bärbara system, avsedda att mäta kropp-srörelser. Datat kan vidare användas som insignal för avancerad rörelseanalys. MEMS-sensorer är dock ofta känsliga för miljöstörningar, såsom stötar, vibra-tion och temperaturförändring. En stor del av den uppmätta MEMS-sensorsig-nalen kommer i själva verket från felkällor såsom brus, offset, null drift och temperaturdrift, samt integrationsdrift. Signalbehandling anses vara den vik-tigaste metoden för att minska dessa fel. För realtidssignalbehandling måste algoritmerna utföras inom en viss angiven tidsgräns. Två avgörande faktorer måste beaktas vid utformning av realtidssignalbehandlingsalgoritmer för bär-bara inbyggda sensorsystem. En utgörs av hårdvarubegränsningar, som leder till en begränsad beräkningskapacitet, och den andra utgörs av användarnas upplevelse av fördröjningen på grund av signalbehandlingen.
I denna avhandling presenteras en systematisk review över olika signalbe-handlingsalgoritmer för att minska felkällorna för MEMS-gyroskopbaserade rörelseanalyssystem. Användarnas upplevelse av fördröjning vid användnin-g av olika inmatninanvändnin-gsenheter till datorer har undersökts. 50 ms utgjorde en acceptabel fördröjning för signalbehandlingsexekveringen i ett realtids-rörelseanalyssystem. I denna avhandling presenteras också realtidsalgoritmer för brusreducering, offset-/driftestimering och reducering, förbättring av
ii
sitioneringsnoggrannhet och systemstabilitet, med hänsyn tagen till de ovan nämnda kraven. Algoritmerna inkluderar ett förenklat högpass och lågpass-filter, en LMS-algoritm, ett Kalman-lågpass-filter, en WFLC-algoritm, enkla nya al-goritmer (en TWD-metod och en hastighetsdriftestimeringsmetod) och en ny kombinationsalgoritm KWT. Kalmanfiltreringsalgoritmen visade sig vara ef-fektiv för att minska problemet med temperaturdrift och WFLC-algoritmen ut-gjorde den mest lämpliga metoden för att reducera människors fysiologiska tremor och elektriskt brus. TWD-metoden resulterade i en signalnivå runt noll utan att avbryta den kontinuerliga rörelsesignalen. Kombinationsmetoden för-bättrade statisk stabilitet och noggrannheten i positionsbestämning betydligt. Beräkningstiden för exekvering av algoritmerna upplevdes som acceptabel av användarna och var inom den angivna tidsgränsen för realtidsprestanda. Im-plementering och experiment visade att dessa algoritmer är lämpliga för att åstadkomma hög signalkvalitet och bra systemprestanda i tidigare utvecklade system, och även har potential att användas i liknande system.
ii
sitioneringsnoggrannhet och systemstabilitet, med hänsyn tagen till de ovan nämnda kraven. Algoritmerna inkluderar ett förenklat högpass och lågpass-filter, en LMS-algoritm, ett Kalman-lågpass-filter, en WFLC-algoritm, enkla nya al-goritmer (en TWD-metod och en hastighetsdriftestimeringsmetod) och en ny kombinationsalgoritm KWT. Kalmanfiltreringsalgoritmen visade sig vara ef-fektiv för att minska problemet med temperaturdrift och WFLC-algoritmen ut-gjorde den mest lämpliga metoden för att reducera människors fysiologiska tremor och elektriskt brus. TWD-metoden resulterade i en signalnivå runt noll utan att avbryta den kontinuerliga rörelsesignalen. Kombinationsmetoden för-bättrade statisk stabilitet och noggrannheten i positionsbestämning betydligt. Beräkningstiden för exekvering av algoritmerna upplevdes som acceptabel av användarna och var inom den angivna tidsgränsen för realtidsprestanda. Im-plementering och experiment visade att dessa algoritmer är lämpliga för att åstadkomma hög signalkvalitet och bra systemprestanda i tidigare utvecklade system, och även har potential att användas i liknande system.
Abstract
This PhD thesis focuses on real-time signal processing for hardware-limited micro-electro-mechanical system (MEMS) sensor-based human motion analy-sis systems. The aim of the theanaly-sis is to improve the signal quality of MEMS gyroscopes and accelerometers by minimizing the effects of signal errors, con-sidering the hardware limitations and the users’ perception.
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are important components in motion analysis systems. They are known for their small size, light weight, low power consumption, low cost, and high sensi-tivity. This makes them suitable for wearable systems for measuring body movements. The data can further be used as input for advanced human mo-tion analyses. However, MEMS sensors are usually sensitive to environmental disturbances such as shock, vibration, and temperature change. A large por-tion of the MEMS sensor signals actually originate from error sources such as noise, offset, null drift and temperature drift, as well as integration drift. Sig-nal processing is regarded as the major key solution to reduce these errors. For real-time signal processing, the algorithms need to be executed within a certain specified time limit. Two crucial factors have to be considered when designing real-time signal processing algorithms for wearable embedded sensor systems. One is the hardware limitations leading to a limited calculation capacity, and the other is the user perception of the delay caused by the signal processing.
Within this thesis, a systematic review of different signal error reduction algorithms for MEMS gyroscope-based motion analysis systems for human motion analysis is presented. The users’ perceptions of the delay when us-ing different computer input devices were investigated. 50 ms was found as an acceptable delay for the signal processing execution in a real-time motion analysis system. Real-time algorithms for noise reduction, offset/drift estima-tion and reducestima-tion, improvement of posiestima-tion accuracy and system stability con-sidering the above mentioned requirements, are presented in this thesis. The
iii
Abstract
This PhD thesis focuses on real-time signal processing for hardware-limited micro-electro-mechanical system (MEMS) sensor-based human motion analy-sis systems. The aim of the theanaly-sis is to improve the signal quality of MEMS gyroscopes and accelerometers by minimizing the effects of signal errors, con-sidering the hardware limitations and the users’ perception.
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are important components in motion analysis systems. They are known for their small size, light weight, low power consumption, low cost, and high sensi-tivity. This makes them suitable for wearable systems for measuring body movements. The data can further be used as input for advanced human mo-tion analyses. However, MEMS sensors are usually sensitive to environmental disturbances such as shock, vibration, and temperature change. A large por-tion of the MEMS sensor signals actually originate from error sources such as noise, offset, null drift and temperature drift, as well as integration drift. Sig-nal processing is regarded as the major key solution to reduce these errors. For real-time signal processing, the algorithms need to be executed within a certain specified time limit. Two crucial factors have to be considered when designing real-time signal processing algorithms for wearable embedded sensor systems. One is the hardware limitations leading to a limited calculation capacity, and the other is the user perception of the delay caused by the signal processing.
Within this thesis, a systematic review of different signal error reduction algorithms for MEMS gyroscope-based motion analysis systems for human motion analysis is presented. The users’ perceptions of the delay when us-ing different computer input devices were investigated. 50 ms was found as an acceptable delay for the signal processing execution in a real-time motion analysis system. Real-time algorithms for noise reduction, offset/drift estima-tion and reducestima-tion, improvement of posiestima-tion accuracy and system stability con-sidering the above mentioned requirements, are presented in this thesis. The
iv
algorithms include a simplified high-pass filter and low-pass filter, a LMS al-gorithm, a Kalman filter, a WFLC alal-gorithm, two simple novel algorithms (a TWD method and a velocity drift estimation method), and a novel combination method KWT. Kalman filtering was found to be efficient to reduce the prob-lem of temperature drift and the WFLC algorithm was found the most suitable method to reduce human physiological tremor and electrical noise. The TWD method resulted in a signal level around zero without interrupting the contin-uous movement signal. The combination method improved the static stability and the position accuracy considerably. The computational time for the execu-tion of the algorithms were all perceived as acceptable by users and kept within the specified time limit for real-time performance. Implementations and exper-iments showed that these algorithms are feasible for establishing high signal quality and good system performance in previously developed systems, and also have the potential to be used in similar systems.
iv
algorithms include a simplified high-pass filter and low-pass filter, a LMS al-gorithm, a Kalman filter, a WFLC alal-gorithm, two simple novel algorithms (a TWD method and a velocity drift estimation method), and a novel combination method KWT. Kalman filtering was found to be efficient to reduce the prob-lem of temperature drift and the WFLC algorithm was found the most suitable method to reduce human physiological tremor and electrical noise. The TWD method resulted in a signal level around zero without interrupting the contin-uous movement signal. The combination method improved the static stability and the position accuracy considerably. The computational time for the execu-tion of the algorithms were all perceived as acceptable by users and kept within the specified time limit for real-time performance. Implementations and exper-iments showed that these algorithms are feasible for establishing high signal quality and good system performance in previously developed systems, and also have the potential to be used in similar systems.
Acknowledgement
I am extremely grateful for having this opportunity to start a PhD journey in my life. It has been a great experience to learn, to gain, to improve continuously, not only in the research field, but also in my life. Here, to complete this thesis, I would like to express my sincere appreciation to all those people who have contributed to this thesis and supported me in one way or another during these years.
I would like to express my deepest thankfulness and gratitude to my su-pervisor Prof. Maria Lindén at Mälardalen University (MDH), for her patient guidances, enthusiastic encouragement, constant support, valuable suggestions and comments throughout my research work over these years, even during the struggling times. She has always been supportive and patient. I feel privileged and lucky to work under her supervision.
I would also like to express my most grateful appreciation to my industrial mentor Christer Gerdtman at Motion Control i Västerås AB. I feel very grateful to him for giving me this chance to work with research in industry. I appreciate his vision, advice, motivation, and leadership to guide me at all times.
They both have contributed a lot to make this study possible. Big thanks once again go to them. Without them this would have never been possible.
I would also like to express my sincere appreciation to my co-supervisors Dr. Magnus Otterskog and Dr. Nikola Petrovic at MDH for their important helps and comments during my studies. Your help and insights have been invaluable.
I am particularly grateful to co-authors Arash Ghareh Baghi and Daniel Kade for the nice collaborative working.
I wish to thank all the persons at School of Innovation, Design and Tech-nology (IDT) at MDH, in particular ITS-EASY industrial research school in Embedded Software and Systems (ITS-EASY) and research group Embedded Sensor System for Health (ESS-H).
vii
Acknowledgement
I am extremely grateful for having this opportunity to start a PhD journey in my life. It has been a great experience to learn, to gain, to improve continuously, not only in the research field, but also in my life. Here, to complete this thesis, I would like to express my sincere appreciation to all those people who have contributed to this thesis and supported me in one way or another during these years.
I would like to express my deepest thankfulness and gratitude to my su-pervisor Prof. Maria Lindén at Mälardalen University (MDH), for her patient guidances, enthusiastic encouragement, constant support, valuable suggestions and comments throughout my research work over these years, even during the struggling times. She has always been supportive and patient. I feel privileged and lucky to work under her supervision.
I would also like to express my most grateful appreciation to my industrial mentor Christer Gerdtman at Motion Control i Västerås AB. I feel very grateful to him for giving me this chance to work with research in industry. I appreciate his vision, advice, motivation, and leadership to guide me at all times.
They both have contributed a lot to make this study possible. Big thanks once again go to them. Without them this would have never been possible.
I would also like to express my sincere appreciation to my co-supervisors Dr. Magnus Otterskog and Dr. Nikola Petrovic at MDH for their important helps and comments during my studies. Your help and insights have been invaluable.
I am particularly grateful to co-authors Arash Ghareh Baghi and Daniel Kade for the nice collaborative working.
I wish to thank all the persons at School of Innovation, Design and Tech-nology (IDT) at MDH, in particular ITS-EASY industrial research school in Embedded Software and Systems (ITS-EASY) and research group Embedded Sensor System for Health (ESS-H).
viii
My special thanks are extended to all the colleges at Motion Control for their expert experience and constructive inspiration. Thank you for all of your kindness, encouragement and support.
I also would like to thank all the participants who contributed their time and provided important test data to this thesis.
Finally, I would like to express immeasurable appreciation to my family for their endless love, consideration, encouragement and support.
This research work was supported by Motion Control i Västerås AB, the research profile ESS-H and ITS-EASY industrial research school. ESS-H and ITS-EASY are initiatives financed by the Swedish Knowledge Foundation (KKS) and affiliated with School of IDT at MDH.
Jiaying Du January 31, 2019 Västerås, Sweden
viii
My special thanks are extended to all the colleges at Motion Control for their expert experience and constructive inspiration. Thank you for all of your kindness, encouragement and support.
I also would like to thank all the participants who contributed their time and provided important test data to this thesis.
Finally, I would like to express immeasurable appreciation to my family for their endless love, consideration, encouragement and support.
This research work was supported by Motion Control i Västerås AB, the research profile ESS-H and ITS-EASY industrial research school. ESS-H and ITS-EASY are initiatives financed by the Swedish Knowledge Foundation (KKS) and affiliated with School of IDT at MDH.
Jiaying Du January 31, 2019 Västerås, Sweden
List of Publications
This is a list of publications that form the basis of the thesis1
Paper A Signal processing algorithms for temperature drift in a MEMS-gyro-based head mouse. Jiaying Du, Christer Gerdtman and Maria Lindén. 21st International Conference on Systems, Signals and Image Process-ing, page(s): 123–126. May, 2014.
Paper B Signal Processing algorithms for position measurement with MEMS-based accelerometer. Jiaying Du, Christer Gerdtman and Maria Lindén. 16th Nordic-Baltic Conference on Biomedical Engineering, Vol.48, page(s): 36–39. October, 2014.
Paper C Noise reduction for a MEMS-gyroscope based head mouse. Jiaying Du, Christer Gerdtman and Maria Lindén. 12th International Conference on Wearable Micro and Nano Technologies for Personalized Health, page(s): 98–104. June, 2015.
Paper D The effects of perceived USB-delay for sensor and embedded system development. Jiaying Du, Daniel Kade, Christer Gerdtman, Oguzhan Özcan, Maria Lindén. 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, page(s): 2492–2495. Au-gust, 2016.
Paper E Perception of delay in computer input devices establishing a base-line for signal processing of motion sensor systems. Jiaying Du, Daniel Kade, Christer Gerdtman, Rikard Lindell, Oguzhan Özcan and Maria Lindén. 3rd International Conference of Internet of Things Technolo-gies for HealthCare, page(s): 107–112. October, 2016.
1The included articles have been reformatted with the PhD thesis layout.
ix
List of Publications
This is a list of publications that form the basis of the thesis1
Paper A Signal processing algorithms for temperature drift in a MEMS-gyro-based head mouse. Jiaying Du, Christer Gerdtman and Maria Lindén. 21st International Conference on Systems, Signals and Image Process-ing, page(s): 123–126. May, 2014.
Paper B Signal Processing algorithms for position measurement with MEMS-based accelerometer. Jiaying Du, Christer Gerdtman and Maria Lindén. 16th Nordic-Baltic Conference on Biomedical Engineering, Vol.48, page(s): 36–39. October, 2014.
Paper C Noise reduction for a MEMS-gyroscope based head mouse. Jiaying Du, Christer Gerdtman and Maria Lindén. 12th International Conference on Wearable Micro and Nano Technologies for Personalized Health, page(s): 98–104. June, 2015.
Paper D The effects of perceived USB-delay for sensor and embedded system development. Jiaying Du, Daniel Kade, Christer Gerdtman, Oguzhan Özcan, Maria Lindén. 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, page(s): 2492–2495. Au-gust, 2016.
Paper E Perception of delay in computer input devices establishing a base-line for signal processing of motion sensor systems. Jiaying Du, Daniel Kade, Christer Gerdtman, Rikard Lindell, Oguzhan Özcan and Maria Lindén. 3rd International Conference of Internet of Things Technolo-gies for HealthCare, page(s): 107–112. October, 2016.
1The included articles have been reformatted with the PhD thesis layout.
x
Paper F A signal processing algorithm for improving the performance of a gy-roscopic head-borne computer mouse. Jiaying Du, Christer Gerdtman, Arash Gharehbaghi and Maria Lindén. Biomedical Signal Processing and Control, vol. 35, page(s): 30–37. May, 2017.
Paper G Signal quality improvement algorithms for MEMS gyroscope based motion analysis systems: a systematic review. Jiaying Du, Christer Gerdtman and Maria Lindén. Sensors, vol. 18, iss. 4, 1123. April, 2018.
x
Paper F A signal processing algorithm for improving the performance of a gy-roscopic head-borne computer mouse. Jiaying Du, Christer Gerdtman, Arash Gharehbaghi and Maria Lindén. Biomedical Signal Processing and Control, vol. 35, page(s): 30–37. May, 2017.
Paper G Signal quality improvement algorithms for MEMS gyroscope based motion analysis systems: a systematic review. Jiaying Du, Christer Gerdtman and Maria Lindén. Sensors, vol. 18, iss. 4, 1123. April, 2018.
Author’s Contribution:
In the Table 1, author’s contribution in the included papers A, B, C, D, E, F and G is presented.
Table 1: The contributions made by Jiaying Du to papers A, B, C, D, E, F and G, 1 = main responsibility, 2 = contributed to a high extent.
Paper sections A B C D E F G Idea and study formulation 1 1 1 2 2 1 1 Experimental design 1 1 1 2 2 1 -Performance of experiments 1 1 1 1 1 1 -Programming 1 1 1 2 2 1 -Data analysis 1 1 1 1 1 1 1 Writing of manuscript 1 1 1 1 1 1 1
The paper G is a systematic overview paper without experiments and programming; therefore, Jiaying Du did not contribute to the experimental design, performance of experiments and programming.
xi
Author’s Contribution:
In the Table 1, author’s contribution in the included papers A, B, C, D, E, F and G is presented.
Table 1: The contributions made by Jiaying Du to papers A, B, C, D, E, F and G, 1 = main responsibility, 2 = contributed to a high extent.
Paper sections A B C D E F G Idea and study formulation 1 1 1 2 2 1 1 Experimental design 1 1 1 2 2 1 -Performance of experiments 1 1 1 1 1 1 -Programming 1 1 1 2 2 1 -Data analysis 1 1 1 1 1 1 1 Writing of manuscript 1 1 1 1 1 1 1
The paper G is a systematic overview paper without experiments and programming; therefore, Jiaying Du did not contribute to the experimental design, performance of experiments and programming.
Other Relevant Work:
Licentiate Thesis
• Signal processing for MEMS sensor based motion analysis sys-tem. Jiaying Du. Licentiate thesis. ISBN 978-91-7485-256-1. Mälardalen University Press. May, 2016.
Conferences and Workshops
• Investigation for measurements of body parameters with sensors. Jiaying Du, Christer Gerdtman, Maria Lindén. Micronano System Workshop 2014. Uppsala, Sweden. May, 2014.
• Signal processing with application to a MEMS-gyroscope based computer head mouse. Jiaying Du, Christer Gerdtman, Maria Lindén. Micronano System Workshop 2016. Lund, Sweden. May, 2016.
• Development of a MEMS-sensor based motion analysis system for human movement rehabilitation. Jiaying Du, Christer Gerdtman, Maria Lindén. International conference on Movement and cogni-tion 2017, page(s): 57. Oxford, UK. July, 2017.
xii
Other Relevant Work:
Licentiate Thesis
• Signal processing for MEMS sensor based motion analysis sys-tem. Jiaying Du. Licentiate thesis. ISBN 978-91-7485-256-1. Mälardalen University Press. May, 2016.
Conferences and Workshops
• Investigation for measurements of body parameters with sensors. Jiaying Du, Christer Gerdtman, Maria Lindén. Micronano System Workshop 2014. Uppsala, Sweden. May, 2014.
• Signal processing with application to a MEMS-gyroscope based computer head mouse. Jiaying Du, Christer Gerdtman, Maria Lindén. Micronano System Workshop 2016. Lund, Sweden. May, 2016.
• Development of a MEMS-sensor based motion analysis system for human movement rehabilitation. Jiaying Du, Christer Gerdtman, Maria Lindén. International conference on Movement and cogni-tion 2017, page(s): 57. Oxford, UK. July, 2017.
List of Abbreviations
ADC Analog Digital Converter ALP Adaptive Linear Prediction ANC Adaptive Noise Cancellation
BMFLC Bandlimited Multiple Fourier Linear Combiner DAC Digital Analog Converter
DSP Digital Signal Processor dsPIC Digital Signal Controller FLC Fourier Linear Combiner HPF High-pass Filter
HCI Human-Computer Interface HMI Human-Machine Interface IMU Inertial Measurement Unit KF Kalman Filter
KWT The combination of KF, WFLC and TWD LMS Least Mean Square
LPF Low-pass Filter
MEMS Micro-electro-mechanical system PIC Peripheral Interface Controller RMS Root Mean Square
RMSE Root Mean Square Error TWD Threshold with Delay µP Microprocessor USB Universal Serial Bus
WFLC Weighted-frequency Fourier Linear Combiner
xiii
List of Abbreviations
ADC Analog Digital Converter ALP Adaptive Linear Prediction ANC Adaptive Noise Cancellation
BMFLC Bandlimited Multiple Fourier Linear Combiner DAC Digital Analog Converter
DSP Digital Signal Processor dsPIC Digital Signal Controller FLC Fourier Linear Combiner HPF High-pass Filter
HCI Human-Computer Interface HMI Human-Machine Interface IMU Inertial Measurement Unit KF Kalman Filter
KWT The combination of KF, WFLC and TWD LMS Least Mean Square
LPF Low-pass Filter
MEMS Micro-electro-mechanical system PIC Peripheral Interface Controller RMS Root Mean Square
RMSE Root Mean Square Error TWD Threshold with Delay µP Microprocessor USB Universal Serial Bus
WFLC Weighted-frequency Fourier Linear Combiner
Contents
I
Thesis
1
1 Introduction 3
1.1 Motivation . . . 4
1.2 Outline of the thesis . . . 5
2 Background 7 2.1 Applications of MEMS sensors in human motion analysis . . . 7
2.2 Small MEMS sensor-based wearable motion analysis systems and their limitations . . . 8
2.2.1 The MultiPos system . . . 8
2.2.2 The TDG sensor system . . . 9
2.2.3 Hardware limitation of small wearable embedded sensor systems . . . 10
2.3 MEMS sensor signals and signal errors . . . 11
2.3.1 MEMS gyroscopic signals . . . 11
2.3.2 MEMS accelerometer signals . . . 12
2.3.3 MEMS sensor signal errors . . . 13
2.3.4 Related signal processing . . . 14
2.4 Users’ perception of the sensor response delay . . . 15
3 Research goal and research questions 17 3.1 Research goal . . . 17
3.2 Research questions . . . 17
4 Research methods 19 4.1 Signal processing algorithms . . . 20
4.1.1 Basic filtering methods . . . 20
xv
Contents
I
Thesis
1
1 Introduction 3 1.1 Motivation . . . 41.2 Outline of the thesis . . . 5
2 Background 7 2.1 Applications of MEMS sensors in human motion analysis . . . 7
2.2 Small MEMS sensor-based wearable motion analysis systems and their limitations . . . 8
2.2.1 The MultiPos system . . . 8
2.2.2 The TDG sensor system . . . 9
2.2.3 Hardware limitation of small wearable embedded sensor systems . . . 10
2.3 MEMS sensor signals and signal errors . . . 11
2.3.1 MEMS gyroscopic signals . . . 11
2.3.2 MEMS accelerometer signals . . . 12
2.3.3 MEMS sensor signal errors . . . 13
2.3.4 Related signal processing . . . 14
2.4 Users’ perception of the sensor response delay . . . 15
3 Research goal and research questions 17 3.1 Research goal . . . 17
3.2 Research questions . . . 17
4 Research methods 19 4.1 Signal processing algorithms . . . 20
4.1.1 Basic filtering methods . . . 20
xvi Contents
4.1.2 Advanced algorithms . . . 21
4.1.3 Novel algorithms . . . 25
4.1.4 Position measurements . . . 28
4.1.5 Evaluation . . . 29
4.2 User tests for perception of the delay . . . 29
5 Scientific contributions 33 5.1 Temperature drift compensation . . . 33
5.2 Noise reduction (electrical noise and tremor) . . . 34
5.3 Combination method to reduce different signal errors simultaneously . . . 34
5.4 Position accuracy improvements for a MEMS accelerometer-based system . . . 34
5.5 Position accuracy improvement for a MEMS gyroscope-based system . . . 35
5.6 Users’ perception of the delay of a MEMS gyroscopic head-borne computer mouse . . . 35
5.7 Systematic overview of signal error reduction for MEMS gyroscope based human motion analysis systems . . . 36
6 Results and discussion 37 6.1 Signal error reduction . . . 37
6.2 Improvement of position accuracy . . . 42
6.2.1 MEMS accelerometers . . . 43
6.2.2 MEMS gyroscopes . . . 45
6.3 Users’ perception of the delay . . . 45
7 Conclusion and future work 47 7.1 Conclusion . . . 47
7.2 Future work . . . 48
Bibliography 51
II
Included Papers
59
8 Paper A: Signal processing algorithms for temperature drift in a MEMS-gyro-based head mouse 63 8.1 Introduction . . . 65 xvi Contents 4.1.2 Advanced algorithms . . . 21 4.1.3 Novel algorithms . . . 25 4.1.4 Position measurements . . . 28 4.1.5 Evaluation . . . 294.2 User tests for perception of the delay . . . 29
5 Scientific contributions 33 5.1 Temperature drift compensation . . . 33
5.2 Noise reduction (electrical noise and tremor) . . . 34
5.3 Combination method to reduce different signal errors simultaneously . . . 34
5.4 Position accuracy improvements for a MEMS accelerometer-based system . . . 34
5.5 Position accuracy improvement for a MEMS gyroscope-based system . . . 35
5.6 Users’ perception of the delay of a MEMS gyroscopic head-borne computer mouse . . . 35
5.7 Systematic overview of signal error reduction for MEMS gyroscope based human motion analysis systems . . . 36
6 Results and discussion 37 6.1 Signal error reduction . . . 37
6.2 Improvement of position accuracy . . . 42
6.2.1 MEMS accelerometers . . . 43
6.2.2 MEMS gyroscopes . . . 45
6.3 Users’ perception of the delay . . . 45
7 Conclusion and future work 47 7.1 Conclusion . . . 47
7.2 Future work . . . 48
Bibliography 51
II
Included Papers
59
8 Paper A: Signal processing algorithms for temperature drift in a MEMS-gyro-based head mouse 63 8.1 Introduction . . . 65Contents xvii
8.2 System background and test . . . 65 8.2.1 System . . . 65 8.2.2 Problem . . . 65 8.3 Signal processing algorithms . . . 67 8.3.1 High-pass filter . . . 67 8.3.2 Kalman filter . . . 67 8.3.3 LMS filter . . . 69 8.4 Simulation, implementation, results and analysis . . . 70 8.4.1 Measurement setup . . . 71 8.4.2 Results . . . 71 8.4.3 Discussion . . . 72 8.5 Conclusion . . . 76 Bibliography . . . 76 9 Paper B:
Signal Processing algorithms for position measurement with MEMS-based accelerometer 81 9.1 Introduction . . . 83 9.2 Methods . . . 83 9.2.1 Integration . . . 85 9.2.2 Filtering . . . 85 9.3 Results . . . 88 9.4 Conclusion . . . 90 Bibliography . . . 90 10 Paper C:
Noise reduction for a MEMS-gyroscope based head mouse 95 10.1 Introduction . . . 97 10.2 Method . . . 98 10.2.1 Signal processing algorithms . . . 98 10.2.2 Test of the algorithms . . . 100 10.3 Results . . . 100 10.4 Discussion . . . 103 10.5 Conclusion . . . 104 Bibliography . . . 104
Contents xvii
8.2 System background and test . . . 65 8.2.1 System . . . 65 8.2.2 Problem . . . 65 8.3 Signal processing algorithms . . . 67 8.3.1 High-pass filter . . . 67 8.3.2 Kalman filter . . . 67 8.3.3 LMS filter . . . 69 8.4 Simulation, implementation, results and analysis . . . 70 8.4.1 Measurement setup . . . 71 8.4.2 Results . . . 71 8.4.3 Discussion . . . 72 8.5 Conclusion . . . 76 Bibliography . . . 76 9 Paper B:
Signal Processing algorithms for position measurement with MEMS-based accelerometer 81 9.1 Introduction . . . 83 9.2 Methods . . . 83 9.2.1 Integration . . . 85 9.2.2 Filtering . . . 85 9.3 Results . . . 88 9.4 Conclusion . . . 90 Bibliography . . . 90 10 Paper C:
Noise reduction for a MEMS-gyroscope based head mouse 95 10.1 Introduction . . . 97 10.2 Method . . . 98 10.2.1 Signal processing algorithms . . . 98 10.2.2 Test of the algorithms . . . 100 10.3 Results . . . 100 10.4 Discussion . . . 103 10.5 Conclusion . . . 104 Bibliography . . . 104
xviii Contents
11 Paper D:
The effects of perceived USB-delay for sensor and embedded
system development 111
11.1 Introduction . . . 113 11.2 Related Work . . . 113 11.3 Research Approach . . . 115 11.3.1 Test Setup and Data Collection . . . 115 11.3.2 Hardware Specification . . . 116 11.3.3 Software Specification . . . 117 11.4 Results and Discussion . . . 117 11.5 Conclusion . . . 121 Bibliography . . . 123
12 Paper E:
Perception of Delay in Computer Input Devices Establishing a Baseline for Signal Processing of Motion Sensor Systems 127 12.1 Introduction . . . 129 12.2 Research Approach . . . 130 12.3 Results and Discussion . . . 131 12.4 Conclusion . . . 134 Bibliography . . . 134
13 Paper F:
A signal processing algorithm for improving the performance of a gyroscopic head-borne computer mouse 139 13.1 Introduction . . . 141 13.2 Method . . . 143 13.2.1 Instrument . . . 143 13.2.2 Data preparation . . . 143 13.2.3 The proposed combination of algorithms . . . 145 13.2.4 Evaluation . . . 148 13.3 Result . . . 148 13.4 Discussion . . . 156 13.5 Conclusion . . . 158 Bibliography . . . 159 xviii Contents 11 Paper D:
The effects of perceived USB-delay for sensor and embedded
system development 111
11.1 Introduction . . . 113 11.2 Related Work . . . 113 11.3 Research Approach . . . 115 11.3.1 Test Setup and Data Collection . . . 115 11.3.2 Hardware Specification . . . 116 11.3.3 Software Specification . . . 117 11.4 Results and Discussion . . . 117 11.5 Conclusion . . . 121 Bibliography . . . 123
12 Paper E:
Perception of Delay in Computer Input Devices Establishing a Baseline for Signal Processing of Motion Sensor Systems 127 12.1 Introduction . . . 129 12.2 Research Approach . . . 130 12.3 Results and Discussion . . . 131 12.4 Conclusion . . . 134 Bibliography . . . 134
13 Paper F:
A signal processing algorithm for improving the performance of a gyroscopic head-borne computer mouse 139 13.1 Introduction . . . 141 13.2 Method . . . 143 13.2.1 Instrument . . . 143 13.2.2 Data preparation . . . 143 13.2.3 The proposed combination of algorithms . . . 145 13.2.4 Evaluation . . . 148 13.3 Result . . . 148 13.4 Discussion . . . 156 13.5 Conclusion . . . 158 Bibliography . . . 159
Contents xix
14 Paper G:
Signal quality improvement algorithms for MEMS gyroscope-based human motion analysis systems: a systematic review 165 14.1 Introduction . . . 167 14.2 Methodology/Method . . . 168 14.2.1 Inclusion and exclusion criteria . . . 168 14.2.2 Searching strategy and analysis . . . 168 14.3 Results . . . 170 14.3.1 Kalman filter (KF)-based algorithms . . . 171 14.3.2 Adaptive-based algorithms . . . 173 14.3.3 Simple filter algorithms . . . 177 14.3.4 Compensation-based algorithms . . . 178 14.3.5 Category of the algorithms . . . 181 14.4 Discussion . . . 181 14.5 Conclusions . . . 187 Bibliography . . . 189
Contents xix
14 Paper G:
Signal quality improvement algorithms for MEMS gyroscope-based human motion analysis systems: a systematic review 165 14.1 Introduction . . . 167 14.2 Methodology/Method . . . 168 14.2.1 Inclusion and exclusion criteria . . . 168 14.2.2 Searching strategy and analysis . . . 168 14.3 Results . . . 170 14.3.1 Kalman filter (KF)-based algorithms . . . 171 14.3.2 Adaptive-based algorithms . . . 173 14.3.3 Simple filter algorithms . . . 177 14.3.4 Compensation-based algorithms . . . 178 14.3.5 Category of the algorithms . . . 181 14.4 Discussion . . . 181 14.5 Conclusions . . . 187 Bibliography . . . 189
I
Thesis
I
Thesis
Chapter 1
Introduction
This thesis focuses on real-time signal processing for hardware-limited MEMS sensor-based human motion analysis systems. The aim of the thesis is to im-prove the signal quality of MEMS gyroscopes and accelerometers by minimiz-ing the effects of signal errors, considerminimiz-ing the hardware limitations and the users’ perception.
MEMS gyroscopes and MEMS accelerometer are commonly used for movement measurements [1]. One well-known problem with these sensors is that the signals usually are contaminated with several kinds of extraneous influences, such as noise, offset and drift, especially temperature drift [2]. In addition, when determining the position or the angle by integration, noise or other errors will accumulate [3]. Thus, the quality of MEMS sensor signals largely effects the system performance.
Real-time signal processing is regarded as an important and necessary tool to reduce the signal errors and improve the performance of MEMS sensor-based human motion analysis systems. The hardware limitations of these wear-able systems includes the typical properties of: limited size and weight of the system, limited power supply available from the battery, and limited calculation capacity available to execute the signal processing algorithms. The execution of signal processing algorithms will always introduce a small time delay [4]. The maximal non-perceived delay by the user is the time limitation allowed for the signal processing to be executed in real time. Due to these limitations, the signal processing algorithms for these systems need to be computationally effective and executed within a certain specified time limit.
In this thesis, considering the need of real-time signal processing
algo-3
Chapter 1
Introduction
This thesis focuses on real-time signal processing for hardware-limited MEMS sensor-based human motion analysis systems. The aim of the thesis is to im-prove the signal quality of MEMS gyroscopes and accelerometers by minimiz-ing the effects of signal errors, considerminimiz-ing the hardware limitations and the users’ perception.
MEMS gyroscopes and MEMS accelerometer are commonly used for movement measurements [1]. One well-known problem with these sensors is that the signals usually are contaminated with several kinds of extraneous influences, such as noise, offset and drift, especially temperature drift [2]. In addition, when determining the position or the angle by integration, noise or other errors will accumulate [3]. Thus, the quality of MEMS sensor signals largely effects the system performance.
Real-time signal processing is regarded as an important and necessary tool to reduce the signal errors and improve the performance of MEMS sensor-based human motion analysis systems. The hardware limitations of these wear-able systems includes the typical properties of: limited size and weight of the system, limited power supply available from the battery, and limited calculation capacity available to execute the signal processing algorithms. The execution of signal processing algorithms will always introduce a small time delay [4]. The maximal non-perceived delay by the user is the time limitation allowed for the signal processing to be executed in real time. Due to these limitations, the signal processing algorithms for these systems need to be computationally effective and executed within a certain specified time limit.
In this thesis, considering the need of real-time signal processing
4 Chapter 1. Introduction
rithms, hardware limitation of the limited calculation capacity and users’ per-ception of delay are crucial factors to consider. Three main aspects are espe-cially considered:
• Signal error reduction - To be able to minimize the signal errors and improve the signal quality.
• Position accuracy improvement - To be able to compensate for the inte-gration drift and improve the position accuracy.
• Considering the hardware limitation and users’ perception of the delay - This aspect defines several criteria on the algorithms developed. They have to be simple enough for implementation and comply with the sys-tem requirements and users’ perception, in real time.
1.1
Motivation
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are widely used in wearable motion analysis systems due to their characteristics of small size, lightweight, low cost, low power consumption, high sensitivity, good linearity, and high precision [5]. Such gyroscopes and accelerometers are frequently used for different human body movement and position measure-ments, but it is well-known that the resolution and stability of MEMS sensors need to be improved [6]. The common errors can be classified into noise, off-set and drift. Temperature drift, caused by temperature changes, is a typical error in MEMS gyroscope-based systems. In addition, the accumulated error during the integration process is also a critical problem in position measure-ments. To improve the performance of a wearable motion system, real-time signal processing algorithms are required to be implemented into the system. The features of miniature, low-cost, low power consumption implies that a sin-gle microprocessor or a microcontroller, a programmable logic device or an application-specific integrated circuit is implemented into the wearable sensor system to perform real-time signal processing [7]. This is not a trivial task considering the limitations in implementation power, memory and power con-sumption resources [7]. It is also important that the small delay introduced by the algorithms is not perceived as a problem by the user of the system. To fulfil the hardware requirements of limited calculation capacity in real time, there is a need to ensure that the sensor data can be used correctly. Under considera-tion of both the hardware limitaconsidera-tions of the small wearable embedded systems
4 Chapter 1. Introduction
rithms, hardware limitation of the limited calculation capacity and users’ per-ception of delay are crucial factors to consider. Three main aspects are espe-cially considered:
• Signal error reduction - To be able to minimize the signal errors and improve the signal quality.
• Position accuracy improvement - To be able to compensate for the inte-gration drift and improve the position accuracy.
• Considering the hardware limitation and users’ perception of the delay - This aspect defines several criteria on the algorithms developed. They have to be simple enough for implementation and comply with the sys-tem requirements and users’ perception, in real time.
1.1
Motivation
MEMS sensors such as MEMS gyroscopes and MEMS accelerometers are widely used in wearable motion analysis systems due to their characteristics of small size, lightweight, low cost, low power consumption, high sensitivity, good linearity, and high precision [5]. Such gyroscopes and accelerometers are frequently used for different human body movement and position measure-ments, but it is well-known that the resolution and stability of MEMS sensors need to be improved [6]. The common errors can be classified into noise, off-set and drift. Temperature drift, caused by temperature changes, is a typical error in MEMS gyroscope-based systems. In addition, the accumulated error during the integration process is also a critical problem in position measure-ments. To improve the performance of a wearable motion system, real-time signal processing algorithms are required to be implemented into the system. The features of miniature, low-cost, low power consumption implies that a sin-gle microprocessor or a microcontroller, a programmable logic device or an application-specific integrated circuit is implemented into the wearable sensor system to perform real-time signal processing [7]. This is not a trivial task considering the limitations in implementation power, memory and power con-sumption resources [7]. It is also important that the small delay introduced by the algorithms is not perceived as a problem by the user of the system. To fulfil the hardware requirements of limited calculation capacity in real time, there is a need to ensure that the sensor data can be used correctly. Under considera-tion of both the hardware limitaconsidera-tions of the small wearable embedded systems
Chapter 1. Introduction 5
at hand, and the users’ perception of the delay caused by the signal processing in these systems, more suitable algorithms and efficient methods are required to improve the signal quality as well as the system performance. These signal processing algorithms are implemented into two previously developed wear-able MEMS motion analysis systems, but also have the potential to be used in similar systems in the future.
1.2
Outline of the thesis
This thesis is organized into two main parts, i.e., the thesis part and the part with the included research papers.
The rest of the thesis part is organized as follows: Chapter 2 introduces the background and related work. Chapter 3 presents the main research goal and three research questions. Chapter 4 presents the method section, which in-cludes the descriptions of the signal processing algorithms. Chapter 5 presents the scientific contributions with references to the included papers. Chapter 6 summarizes and discusses the result. Finally, Chapter 7 concludes the main findings in this thesis and gives an insight into possible future work.
The second part includes the seven research papers which are presented and organized as chapters from 8 to 14.
Chapter 1. Introduction 5
at hand, and the users’ perception of the delay caused by the signal processing in these systems, more suitable algorithms and efficient methods are required to improve the signal quality as well as the system performance. These signal processing algorithms are implemented into two previously developed wear-able MEMS motion analysis systems, but also have the potential to be used in similar systems in the future.
1.2
Outline of the thesis
This thesis is organized into two main parts, i.e., the thesis part and the part with the included research papers.
The rest of the thesis part is organized as follows: Chapter 2 introduces the background and related work. Chapter 3 presents the main research goal and three research questions. Chapter 4 presents the method section, which in-cludes the descriptions of the signal processing algorithms. Chapter 5 presents the scientific contributions with references to the included papers. Chapter 6 summarizes and discusses the result. Finally, Chapter 7 concludes the main findings in this thesis and gives an insight into possible future work.
The second part includes the seven research papers which are presented and organized as chapters from 8 to 14.
Chapter 2
Background
The following chapter presents the research background and a related research overview over MEMS sensor-based human motion analysis systems and algo-rithms.
2.1
Application of MEMS sensors in human
motion analysis
Human motion analysis is an important research area, especially in health re-lated areas, such as rehabilitation, athletic performance analysis, monitoring of fall detection and fall prevention of elderly at home etc. [8]. A variety of systems have been developed for human motion analysis. Using cameras is a common way for motion capture [9]. This has been developed with several or single three-dimensional (3D) cameras [10, 11]. However, a free-living mea-surement environment has been an extremely challenging issue [12]. Wearable health monitoring systems have attracted considerable attention from both in-dustry and research community in the recent years, with the increasing costs of healthcare, demographic changes and multiple diseases as drivning forces [13]. The mentioned challenges addresses the demand where miniature, low-weight and low-cost systems are needed [14].
MEMS represents a class of miniature electro-mechanical devices. The MEMS technology has rapidly developed in the latest 50 years and has been applied in many areas, such as consumer products, aerospace, automotive, biomedical, chemical, optical displays, wireless and optical communications
7
Chapter 2
Background
The following chapter presents the research background and a related research overview over MEMS sensor-based human motion analysis systems and algo-rithms.
2.1
Application of MEMS sensors in human
motion analysis
Human motion analysis is an important research area, especially in health re-lated areas, such as rehabilitation, athletic performance analysis, monitoring of fall detection and fall prevention of elderly at home etc. [8]. A variety of systems have been developed for human motion analysis. Using cameras is a common way for motion capture [9]. This has been developed with several or single three-dimensional (3D) cameras [10, 11]. However, a free-living mea-surement environment has been an extremely challenging issue [12]. Wearable health monitoring systems have attracted considerable attention from both in-dustry and research community in the recent years, with the increasing costs of healthcare, demographic changes and multiple diseases as drivning forces [13]. The mentioned challenges addresses the demand where miniature, low-weight and low-cost systems are needed [14].
MEMS represents a class of miniature electro-mechanical devices. The MEMS technology has rapidly developed in the latest 50 years and has been applied in many areas, such as consumer products, aerospace, automotive, biomedical, chemical, optical displays, wireless and optical communications
8 Chapter 2. Background
and fluidics etc., where miniaturization is beneficial [15]. MEMS based mo-tion sensors such as MEMS gyroscopes and MEMS accelerometers are inertial sensors [16], and compared to the traditional sensors, they have the advantage of small size, light weight, low cost, low power consumption, high sensitiv-ity, good linearity and high precision [5]. Therefore, they have been applied extensively in the areas of automobiles, consumer electronics, spacecraft and robotics [17], especially in the consumer-grade application of motion interface [18].
The MEMS gyroscopes and MEMS accelerometers have already been widely used in motion analysis systems in the health related field, for exam-ple, the knee/ankle joint measurement [19, 20, 21, 22], gait analysis [23, 24], ambulatory measurement and analysis of the lower limb [25, 26], collection of anatomical joint angles during stair ascent [27], hand gesture recognition [28, 29, 30], head motion controlled wheel chair [31], and head motion con-trolled computer mouse [32, 33]. They have also been adopted to a digital mo-tion analysis system for rehabilitamo-tion from impairment such as those caused by accidents or strokes [34, 35].
2.2
Small MEMS sensor-based wearable motion
analysis systems and their limitations
The algorithms developed in this thesis are implemented into two typical wearable embedded motion sensor systems that have been developed by the Swedish company Motion Control. One of the systems is named the MultiPos system, which is a MEMS gyroscope-based computer head mouse for disabled persons [33], and the other is a 3D sensor measurement system that is called the Three-Dimensional-Gyro (TDG) sensor system [36]. Both these systems are small MEMS sensor-based wearable motion analysis systems with limited calculation capacity. The MEMS sensor signal errors affect the system perfor-mance a lot. In order to minimize the errors and improve the signal quality, real-time signal processing algorithms have been developed within this thesis.
2.2.1
The MultiPos system
The MEMS sensor based computer head mouse, i.e., the MultiPos system, is an embedded sensor system with MEMS gyroscopes that can detect head movements. It has been developed previously with the aim to assist persons with movement disorders [33]. It enables the users to control the computer
8 Chapter 2. Background
and fluidics etc., where miniaturization is beneficial [15]. MEMS based mo-tion sensors such as MEMS gyroscopes and MEMS accelerometers are inertial sensors [16], and compared to the traditional sensors, they have the advantage of small size, light weight, low cost, low power consumption, high sensitiv-ity, good linearity and high precision [5]. Therefore, they have been applied extensively in the areas of automobiles, consumer electronics, spacecraft and robotics [17], especially in the consumer-grade application of motion interface [18].
The MEMS gyroscopes and MEMS accelerometers have already been widely used in motion analysis systems in the health related field, for exam-ple, the knee/ankle joint measurement [19, 20, 21, 22], gait analysis [23, 24], ambulatory measurement and analysis of the lower limb [25, 26], collection of anatomical joint angles during stair ascent [27], hand gesture recognition [28, 29, 30], head motion controlled wheel chair [31], and head motion con-trolled computer mouse [32, 33]. They have also been adopted to a digital mo-tion analysis system for rehabilitamo-tion from impairment such as those caused by accidents or strokes [34, 35].
2.2
Small MEMS sensor-based wearable motion
analysis systems and their limitations
The algorithms developed in this thesis are implemented into two typical wearable embedded motion sensor systems that have been developed by the Swedish company Motion Control. One of the systems is named the MultiPos system, which is a MEMS gyroscope-based computer head mouse for disabled persons [33], and the other is a 3D sensor measurement system that is called the Three-Dimensional-Gyro (TDG) sensor system [36]. Both these systems are small MEMS sensor-based wearable motion analysis systems with limited calculation capacity. The MEMS sensor signal errors affect the system perfor-mance a lot. In order to minimize the errors and improve the signal quality, real-time signal processing algorithms have been developed within this thesis.
2.2.1
The MultiPos system
The MEMS sensor based computer head mouse, i.e., the MultiPos system, is an embedded sensor system with MEMS gyroscopes that can detect head movements. It has been developed previously with the aim to assist persons with movement disorders [33]. It enables the users to control the computer
Chapter 2. Background 9
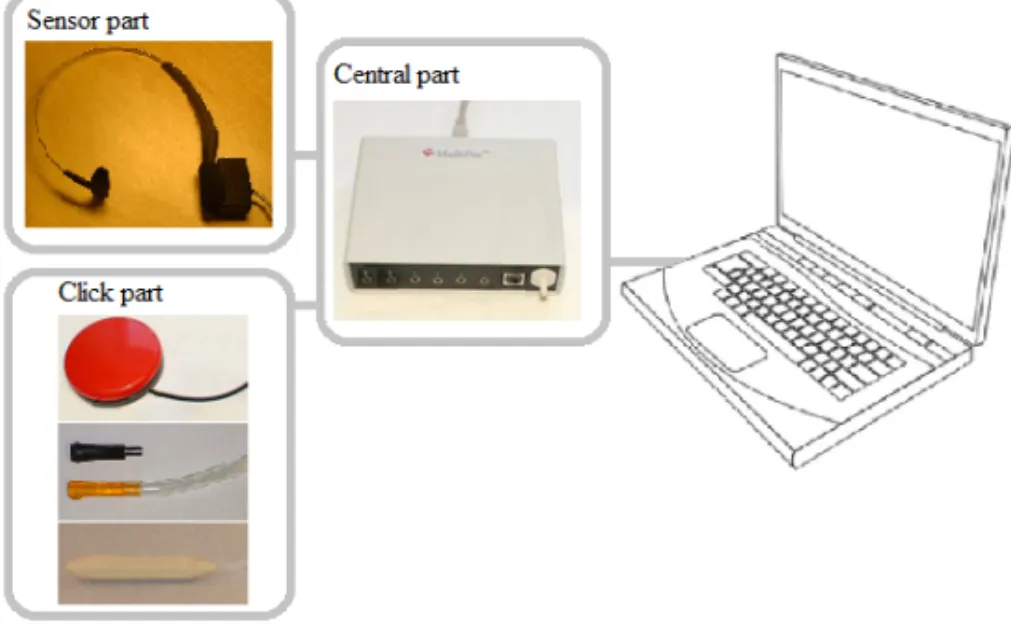
cursor by moving the head instead of the hands. As shown in Figure 2.1, the system consists of three main parts, the wearable sensor part with the MEMS gyroscope, the central part for power supply, control and communication, and the click function part, which can be a click button, a sip-and-puff tube or a biting gum depending on the specific needs of the user.
Figure 2.1: The MultiPos system.
The MEMS gyroscope is used to sense the head movement in a 2D sur-face (x-axis and y-axis). However, the MEMS gyroscope signal is affected by a large portion of noise due to the sensitivity of the MEMS gyroscope to en-vironmental disturbances such as other movements like vibration and tremor, and environment factors like temperature changes.
The MultiPos system works in real time with limited calculation capability due to the hardware limitation. There is a dsPIC in the MultiPos system used as a slave processor with signal processing functions.
2.2.2
The TDG sensor system
The 3D motion measurement system named the TDG sensor system is a MEMS sensor-based embedded 3D sensor system for measuring movements [36]. The TDG system is aimed to evaluate a person’s ability to move different body parts, e.g., the neck, the arm or the leg. The intended application areas
Chapter 2. Background 9
cursor by moving the head instead of the hands. As shown in Figure 2.1, the system consists of three main parts, the wearable sensor part with the MEMS gyroscope, the central part for power supply, control and communication, and the click function part, which can be a click button, a sip-and-puff tube or a biting gum depending on the specific needs of the user.
Figure 2.1: The MultiPos system.
The MEMS gyroscope is used to sense the head movement in a 2D sur-face (x-axis and y-axis). However, the MEMS gyroscope signal is affected by a large portion of noise due to the sensitivity of the MEMS gyroscope to en-vironmental disturbances such as other movements like vibration and tremor, and environment factors like temperature changes.
The MultiPos system works in real time with limited calculation capability due to the hardware limitation. There is a dsPIC in the MultiPos system used as a slave processor with signal processing functions.
2.2.2
The TDG sensor system
The 3D motion measurement system named the TDG sensor system is a MEMS sensor-based embedded 3D sensor system for measuring movements [36]. The TDG system is aimed to evaluate a person’s ability to move different body parts, e.g., the neck, the arm or the leg. The intended application areas
10 Chapter 2. Background
are health related applications, training, human motion analysis and rehabili-tation. An example of a typical application of the system is as a training tool for patients with whiplash associated disorders. As shown in Figure 2.2, the system consists of two main parts; the sensor part and the central part includ-ing power supply, control and communication, connected to a computer via the USB-port. The sensor part consists of various types of MEMS gyroscopes and MEMS accelerometers, selected for the application, and different attachments, as wearable bands attached around the head, arms or legs.
Figure 2.2: The TDG system.
The sensor part can be selected among 1D, 2D and 3D MEMS gyroscopes and MEMS accelerometers. The MEMS gyroscopes and MEMS accelerome-ters measure the movement to determine the position and movement pattern. MEMS gyroscopes measure the angular rate, from which the angular position can be derived by integration, while MEMS accelerometers measure the accel-eration, from which the velocity and position can also be calculated. However, the errors in the measured signals are enlarged during the digital integration process. Except for the errors from the sensor itself, the integration drift is a problem that need to be solved. The signal processing work in this thesis has the aim to improve the signal quality and accuracy of the position calculation.
2.2.3
Hardware limitation of small wearable embedded
sensor systems
Both the MultiPos system and the TDG system are wearable embedded sensor systems. These kind of systems require real-time performance and are
de-10 Chapter 2. Background
are health related applications, training, human motion analysis and rehabili-tation. An example of a typical application of the system is as a training tool for patients with whiplash associated disorders. As shown in Figure 2.2, the system consists of two main parts; the sensor part and the central part includ-ing power supply, control and communication, connected to a computer via the USB-port. The sensor part consists of various types of MEMS gyroscopes and MEMS accelerometers, selected for the application, and different attachments, as wearable bands attached around the head, arms or legs.
Figure 2.2: The TDG system.
The sensor part can be selected among 1D, 2D and 3D MEMS gyroscopes and MEMS accelerometers. The MEMS gyroscopes and MEMS accelerome-ters measure the movement to determine the position and movement pattern. MEMS gyroscopes measure the angular rate, from which the angular position can be derived by integration, while MEMS accelerometers measure the accel-eration, from which the velocity and position can also be calculated. However, the errors in the measured signals are enlarged during the digital integration process. Except for the errors from the sensor itself, the integration drift is a problem that need to be solved. The signal processing work in this thesis has the aim to improve the signal quality and accuracy of the position calculation.
2.2.3
Hardware limitation of small wearable embedded
sensor systems
Both the MultiPos system and the TDG system are wearable embedded sensor systems. These kind of systems require real-time performance and are
de-Chapter 2. Background 11
signed to fulfil the requirements of wearables. These typical properties limit the selection of components and lead to hardware limitation of the system, i.e., limited size and weight of the system, limited power supply available from the battery, and limited calculation capacity available to execute the signal process-ing algorithms. A delay is introduced by the signal processprocess-ing algorithm, with a need of more execution time as the complexity of the algorithm increases. Thus, the limited calculation capacity is a crucial and essential factor to con-sider in the implementation of real-time signal processing of small wearable embedded sensor systems.
2.3
MEMS sensor signals and signal errors
MEMS gyroscopes and MEMS accelerometers are commonly used when de-signing motion analysis systems. In 3D MEMS gyroscope and MEMS ac-celerometer signals, coordinates of three axes are presented, i.e., x, y and z. The z-axis baseline of 3D MEMS gyroscope and MEMS accelerometer sig-nals are different because of their working principles.
2.3.1
MEMS gyroscopic signals
MEMS gyroscopes are based on the Coriolis effect, and measure the angular rate [37]. The working principle of a 3D MEMS gyroscope is shown in Fig-ure 2.3. In the ideal case, the signals of all three axes are zero when the sensor is stationary. When it is moved, the MEMS gyroscope detects the angular rate and presents the signal in the unit of degree per second [◦/s].
Figure 2.3: Coordinate system of a 3D MEMS gyroscope.
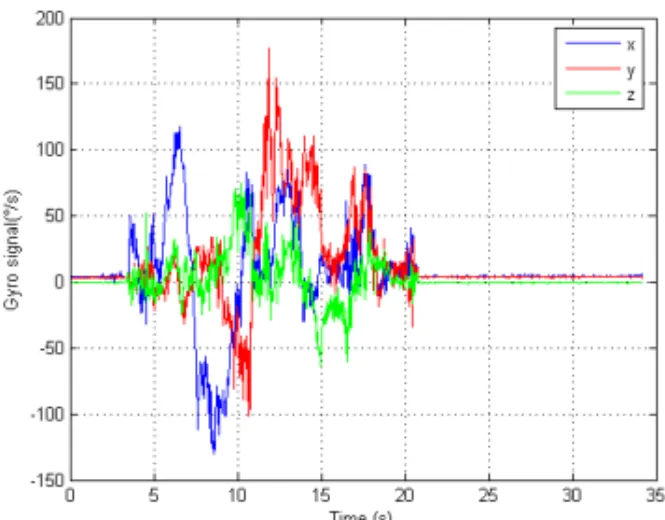
An example of a three-axis MEMS gyroscopic signal is shown in Fig-ure 2.4. The blue, red and green curves present the x-, y- and z-axis signal,
Chapter 2. Background 11
signed to fulfil the requirements of wearables. These typical properties limit the selection of components and lead to hardware limitation of the system, i.e., limited size and weight of the system, limited power supply available from the battery, and limited calculation capacity available to execute the signal process-ing algorithms. A delay is introduced by the signal processprocess-ing algorithm, with a need of more execution time as the complexity of the algorithm increases. Thus, the limited calculation capacity is a crucial and essential factor to con-sider in the implementation of real-time signal processing of small wearable embedded sensor systems.
2.3
MEMS sensor signals and signal errors
MEMS gyroscopes and MEMS accelerometers are commonly used when de-signing motion analysis systems. In 3D MEMS gyroscope and MEMS ac-celerometer signals, coordinates of three axes are presented, i.e., x, y and z. The z-axis baseline of 3D MEMS gyroscope and MEMS accelerometer sig-nals are different because of their working principles.
2.3.1
MEMS gyroscopic signals
MEMS gyroscopes are based on the Coriolis effect, and measure the angular rate [37]. The working principle of a 3D MEMS gyroscope is shown in Fig-ure 2.3. In the ideal case, the signals of all three axes are zero when the sensor is stationary. When it is moved, the MEMS gyroscope detects the angular rate and presents the signal in the unit of degree per second [◦/s].
Figure 2.3: Coordinate system of a 3D MEMS gyroscope.
An example of a three-axis MEMS gyroscopic signal is shown in Fig-ure 2.4. The blue, red and green curves present the x-, y- and z-axis signal,