117
1987
Hybridmetod för provning av antilåssystem
Göran Palmkvist och Olle Nordström
Särtryck ur SMR: Svenska Mekanisters Riksförening.
Tidskrift 7986: 4, sid 73 27
(db
!
? Väg-06]! af/If
Statens väg- och trafikinstitut (VTI) . 581 01 Linköping
Inst/tutet Swedish Roadand Traffic Research Institute . 8-58 1 o 1 Linköping Sweden
ISSN 0347-6049
VTIsärtryck
117
1937
Hybridmetad för provning av antilåssystem
Göran Palmkvist och Olle Nordström
Särtryck ur SMR: Svenska Mekanisters Riksförening.
Tidskrift 7986: 4, sid 73 27
Vag- 06/1 a k-
Statens väg- och trafikinstitut (VTI) . 581 0 7 Linköping
Hybridmetod för provning av antilåssystem
Göran Palmkvist, civ.ing LITH, Y 1973, VTI, Linköping.
lze forskning vid Trafikant o fordonsavd, resursgrupp Simulering. Qlle Nordström, civ.ing KTH M 1960, VTI Linköping.
Overing vid Trafikant o fordonsavd, resursgrupp Fordonsteknik.
Sammanfattning
Provning av stabilitet, styrbarhet och bromsförmåga under bromsning hos for don med antilåssystem (ABS) på vinter väglag i olika former är viktigt för värde-ring av systemet. Provbaneförsök är vä-derberoende och ofta dyrbara. Det är där-för önskvärt att få fram alternativa prov-metoder.
Med detta syfte har vid Statens Väg-och Trafikinstitut (VTI) framtagits en labora-toriemetod för provning av antilåssystem under olika friktions- och manöverbeting
elser, som är svårkontrollerade, riskabla
och dyrbara vid fältprovning men samti-digt väsentliga för bedömning av syste mets egenskaper. Projektet har bekostats av STU.
Fordonet inklusive hjulen är därvid
stil-lastående. Fordonsrörelse, hjulrörelser,
hjulsensorsignaler, bromsmoment och däck- och vägbanefriktion realtidsimule ras i en dator, som sammankopplas med det verkliga antilåssystemets elek-tronikenhet samt med tryckmätdon an-slutna till hjulbromsarna på det verkliga
fordonet. De verkliga hjulsensorernas sig-nalkarakteristik uppmäts separat och pro grammeras in i datorn. Vid provning be tjänas bromssystemet som vid ett verkligt fältprov. Denna hybridprovmetod ger full kontroll över vid fältprov besvärliga para-metrar som däck-vägbanefriktion och bromskarakteristik men är å andra sidan inte användbar för provning av hjulbrom sarna i konventionell mening. Antilåssys-tem med helt mekanisk funktion kan inte heller provas.
Metoden har med gott resultat valide-rats mot fältprov. Undersökta provtyper har varit rakbromsning och bromsning i kurva samt rakbromsning med hög frik tion för ena sidans hjul och låg för den andra.
Inledning
För utprovning och kartläggning av ABS-prestanda erfordras speciella provbanor med olika underlag typ is, grus etc samt kombinationer av dessa underlag. Fält-försöken är vanligtvis mycket kostsamma 13
och tidskrävande. Antalet försök och provbetingelser måste därför begränsas. Vidare innefattar fältförsöken problem med konstanthållning av provbetingelser na. Studier i fält av antilåssystemets käns lighet för förändringar i fordons- och däckdata är mycket kostsamma och ibland omöjliga att genomföra.
Ett alternativ är att genomföra en kon ventionell datorsimulering. Nackdelen med en sådan simulering är att det krävs en detaljerad beskrivning av antilåssyste met. En sådan beskrivning är oftast svår att erhålla från tillverkaren bl a pga sekre tesskäl. Vid datorsimuleringen testas inga av antilåssystemets komponenter vilket också är en nackdel.
Dessa nackdelar elimineras i stor ut sträckning med den s k hybridprovmeto den som presenteras i det följande.
Principen har använts förut i flera sam-manhang för utprovning av antilåssys
tem, se ref 4, 5, 6 och 7 men i dessa fall
kunde endast bromsning rakt fram stude-ras och analog simuleringsteknik använ-das.
Vid studier av ett antilåssystems inver-kan på fordonens stabilitet och styrbarhet under bromsning är det nödvändigt att an-vända mer komplexa däckmodeller som också återger sidkrafter och dessas be roende av bromskrafterna.
Utvecklingen av snabba digitala datorer gör det nu möjligt att genomföra digitala simuleringar i realtid med relativt komple xa fordons- och däckmodeller. Denna tek-nik har använts med gott resultat vid VTI i den metod som här presenteras. Framför allt kunde specifika egenskaper hos olika antilåssystem, uppmätta under fältförsö k,återges vid simuleringarna.
Den pågående utvecklingen på datorsi dan kommer att ge ännu snabbare datorer till överkomligt pris. Noggrannheten och modellkomplexiteten i hybridsimulering-en kan då ytterligare förbättras.
Metod
Vid hybridsimuleringen utnyttjas ett verk-ligt ABS-utrustat fordon stillastående och 14
L. Styrenhet Reglerventil Tryckgivare Kommunikations _1' Kommunikations modul i fordon modul vid dator
Hjulhastighetssignal
! ________________|] Hiuldynamik II
Däckkarakteristik Fordonsd namik
L.._____._____._____________4
Figur ]. Principschema för hybridsimu-leing.
ett kablage inkopplas mellan fordon och dator. Ett principschema visas i figur 1.
Antilåssystemets ordinarie sensorer för avkänning av hjulhastigheterna bort-kopplas och ersätts med simulerade hjul-pulssignaler ifrån datorn. Tryckgivare an-bringas vid varje bromscylinder för upp mätning av bromstrycket vid resp for-donshjul. På bromspedalen anbringas en givare för registrering av bromsaktive-ring. Uppmätta bromstryck utgör indata till simuleringsmodellen.
Hybridsimuleringen, som naturligtvis sker i realtid, skall när bromsen ansättes i det stillastående fordonet simulera ett för-lopp hos fordon och antilåssystem som motsvarar en verklig körning under sam-ma provbetingelser. De simulerade hjul-hastigheterna registreras som i verklighe-ten av ABS-styrenheverklighe-ten i fordonet som via reglerventiler anpassar bromstrycken i resp bromscylinder. Bromstrycken som uppmätes påverkar via simuleringsmodel len i datorn hjulhastigheterna varvid reg-lerkretsen är sluten.
I datorprogrammet definieras indata till fordons- och däckmodell samt antal pul-ser/hjul för antilåssystemet. Före varje prov inläses starthastighet samt typ av manöver. Se fig 2.
Då datorprogrammet aktiveras accele-rerar fordonet upp till den inlästa start-hastigheten. Startfasen säkerställer att fordonets ABS genomlöper en normal uppstartning.
Simuleringen avbrytes när fordonshas-tighet eller provtid uppnått inprogramme-rade värden. Efter provet erhålles en ut-skrift av resultaten från simuleringen. Se
UEHICLE Pnannzrsns :::atttvzanlcllnzltxntttl HEICHY- 6580. xc untecanscc :.ae n nsxcr or c.c-a.za n
TRACKUIDIH FIR ach-a sez:.eo n z-nnss non. or ungar-2599: xcnszz Loan on ran nxLe- 33794. , 29975. N nor- .se non: 7a
HEEL nnss non. bs antar-xi. s z 27. oxnnztz HEEL Rautus: . 59 n
s. F. FIR waists-uses. zzoea. unzann
GLS PaRn ETERS :::ttrxxltxtntvxttltlill! HHEELPULSES/ROT.UIBB. OTHER PARanETERS xxaltalzxzttxal0113333311 IlnE SIEP- .085 s $. nHPLF. : 492 .481 .494
annu: HY51.P9H- .se Po- . Bank: "757. rnn- .se PB- . 1IRE HDDEL-lrl VEST RADIUSIBBESU lNlTlRL UGLUES atttrtss:xxtvtttttxixattt SPEED-ll.03 HIS uHELLnnc.nao-.-.oza .493 BAR/U .25
Figur 2. Datorutskrift för indata till simu-leringsmodell:
fig 3. Kurvor kan plottas som beskriver olika tidsförlopp för fordon och hjul.
T ex
fordonshastighet
longitudinell och lateral acceleration avdriftsvinkel
girvinkelhastighet
fordonets position och kurs relativt ett fixt koordinatsystem
styr- och bromstrycksförlopp för resp hjul
Hårdvara
Vid hybridsimuleringen används en digi-taldator av typ SEL 32. Datorn tillåter korta beräkningstider och är väl lämpad för realtidssimuleringar. Minneskapacite-ten är 0,5 Mbyte halvledarminne plus skivminnen 100 Mbyte.
I kringutrustningen ingår bl a plotter-och printerutrustning för presentation och dokumentation av erhållna resultat. Datorn är utrustad med ett interface inne hållande 16 bitars A/D D/A omvandla re.
Utrustningen för kommunikation mel lan datorer och fordon består väsentligen
RESULTS
Xlttiiltltllliitiltlil!tt
SIOPPlNC DISYANCE- 50.29 H Y ESUs-10.33 H
FINRL YRH NC. DEG. ' -27.6|
HAXISLiPOANG. DEG. ' 2.17 ? TIME-_ 1.59
$10PP3NC Tl E'9
IOUIU. UNlF. DECEL. 31. 203 HIS"
HAX LR? GCC. HISIIZI 'I. 96 RT Tl E' 3 10 SLIP ::::tttllizltzttttntilxxt L 1$.>U)1B.H/S ax "En" u O O Q U Q U a) N 0 H . 10.)U) 5.615 nax 1.099 HE F1NRL PRESSURE ann tztxtl3:138tttsllxllgxäåt unssto tank c 0
Figur 3. Datorutskriftför resultatfrån hy-bridsimulering.
av två moduler. En modul placerad vid datorn omvandlar simulerad hjulhastig-het (via D/A omvandlare) till ett pulståg vars frekvens beror av hjulhastighet och antal pulser per hjulvarv för ALS-sys temet. I modulen ingår också filter och förstärkare för anpassning av översända bromstryck till lämpliga nivåer för A/D omvandlarna.
Via en 60 m lång kabel förbinds modu-len vid datorn med en motsvarande modul i fordonet. Modulen i fordonet omvand-lar via optokoppomvand-lare det översända hjul-pulståget till signaler som nivå- och impe-dansmässigt kan ersätta de ordinarie sen-sorsignalerna. Varje simulerad sensorsig nal är galvaniskt skild från övriga sensor signaler.
Tryckgivarna (4 st) med tillhörande mätförstärkare registrerar bromstrycket i bromsklockorna vid varje fordonshjul. Via omvandling till strömmatning i modu len översändes bromstrycket till datorn. Ingen galvanisk koppling existerar mellan fordon och datormodul genom kablaget. I fig 4 beskrives utrustningen med ett prin-cipschema. I fig 5 visas de två kommuni kationsmodulerna samt de fyra tryckgi varna och deras förstärkare.
Computer SEL 32 IV". +H computer module ... _. _... __ __ __ __ __ __ _.._.__ __...1|caolel
vehicle module r" " " " " " " "1
7
| _ l impedance ann | m _ v _ ; . level adaptation _ Dm ¢" V'? T __ Driver Xl & simulated vheel- g i | sensorsignals. | g _______________ ._4 ' 'L... __ __ __ __ __._._1 "
'
Air
Tw3
Zj channel 2 31» .a: 28 . __] 'irL Jong») : .-??channel 3
( %?5'
? 9
år
5 ! r L'
4-3 5
I (b4 L_ ' __ca; 8(lmchannel 4
i$1f%.
_L_£5
L -' -"-"'-'*- '_' -- - - -] - -' - - - -1r __ Anpli- | L1 Amplifier r A/D r Filter fier 1 IsOlat u n- pressurel fl amplifier transducer ' U| : &
channel 2
_'l"| [1- J. P(
_l1-432
c : |E» - .: U -j channel 3 ;f!gfJ "| ft ' _!l4gm*- xa a
channel 4
2h4¥§
Léåf
'ÖJ 1 [L3 __1 a? ofier x {0 |___/ | | &_ Trigger
' brake
__!
Calibration
logic Driver
Figur 4. Principschema för hybridsimuleringsutrustningen.
Kommunikationsmodul 1 fordon
'Fö
wwwrStärkare
till tryckgivare me' '$ $$$ was:-. Tryckgivare
Figur 5. Utrustningsenheter för hybridsimulering. 16
Kommunikationsmodul vid dator
Simuleringsmodell
Allmänt
Onskvärda egenskaper hos simulerings-modellen är att den beskriver fordonets dynamik korrekt och att beräkningstiden är kort. De snabba förändringarna av bromstrycksignalen i kombination med hjulets snabba dynamik ställer krav på korta beräkningstider. Den simulerings-modell och de beräkningsmetoder som an-vändes får därför utgöra en kompromiss då korta beräkningstider måste priorite-ras.
Modellen har programmerats i Fortran 77.
Fordonsmodell
En enkel fyrhjulig matematisk fordons-modell (se ref 1) har använts. Modellen som tillåter kurvkörning framföres på en horisontell vägbana. Fordonet har anta-gits så styvt fjädrat att kräng-, nick och vertikalrörelser kan försummas.
Friktionskrafterna mellan däck och vägbana bestämmer fordonets rörelse. Hjulens normalkrafter beräknas med hänsyn till den lastöverflyttning som upp-står vid kurvkörning och fartändring. Lastöverflyttningens fördelning mellan fram-och bakaxel vid kurvkörning be stämmes av krängstyvhetsförhållandet för fram och bakfjädring.
Kravet på kort beräkningstid tillåter med den använda datorn endast hybridsi-mulering av ett fyrhjuligt fordon. En mo-dell har utvecklats för separat hybridsi-mulering av släpvagn. Dragstångens kopplingspunkt i dragbilen beskriver då en förutbestämd bana oberoende av de krafter som uppstår i kopplingspunkten.
Bromsmodell
I bromsmodellen omvandlas det upp-mätta bromstrycket till motsvarande bromsmoment. För resp axel väljes i mo-dellen (se fig 6) ansättningstrycket (PAN), skalfaktor (SF) samt P1, P0 som definie rar hysteresförloppet. Inverkan av temp, hjulhastighet etc försummas.
Bromsmoment
A
7 / E') )L EÅ * AN
Bromstryck
Figur 6. Bromsmodell. DäckmodellDäckmodellen, som är av matristyp, tillåter inläsning av experimentellt upp mätta friktionsdata. Friktionstalet i längd- och sidled MX resp My inläses i matri sen enligt
m. = f(a, & FZ)
My = f(oc, 8,132)
oz = däckets avdriftsvinkel s = däckets slip FZ = normalkraftenBåde M och My definieras i distinkta punkter. Mellan punkterna beräknas frik-tionstalen genom linjär interpolation.
Valet av beräkningstid begränsar anta let element i matrisen. Den matris som ut nyttjas vid hybridsimuleringen har dimen-sionen f(5, 10, 3).
Beräkning av hjulhastigheterna
Hjulen betraktas som stela skivor vilkas varvtalsförändring bestäms av bromsmo mentet, vägfriktionsmomentet och trög hetskrafterna.
Interaktionen mellan höger och vänster hjul pga differentialväxeln ingår också i modellen.
Bromstrycket samplas vid tidpunkterna
t = n At n = 0,1, 2... I bromsmodel
len konverteras trycket till ett bromsmo ment. Bromsmomentet MB (t) ansättes
styckvis konstant i intervallet n - At5_t < (n + 1) - At.
Däckdata antages oberoende av den
frekvens med vilken s, a och FZ förändras.
Den korrekta överföringsfunktionen be-skriver sannolikt i verkligheten ett beroen-de av frekvensen.
För god noggrannhet vid låga hastighe-ter krävs, vid beräkning av hjulhastighe terna, ett integrationssteg (At) av storleks-ordningen 1 ms. Realtidssimulering med nuvarande datorresurser medger inte val av integrationssteg i denna storleksord ning.
Vid realtidssimulering med den beskriv na 4-hjulsmodellen är f n At = 5 ms. Nu genomförd installation av en parallellpro-cessor i befintlig SEL-32 gör det sannolikt möjligt att reducera At till 2 2.5, ms vil-ket med hänsyn till antilåssystemets funk-tion vid lägre hastigheter (<2 3 m/s) är acceptabelt.
Indata till simuleringsmodell
Fordonets vikt, hjulbas, spårvidd fram-/bak, lastfördelning och sambandet bromstryck/bromskraft har uppmätts el
ler erhållits från fabrikanten. Övriga
pa-rametrar som girtröghetsmoment,
hjul-tröghetsmoment, krängstyvhetsförhållan
de (f/b) och hysteresdata för bromsar har uppskattats från publicerade data (se ref 2).
Däckmodellen (se fig 7) för lågfriktion-sunderlaget is har huvudsakligen sam-manställts från data över personbildäck (se ref 3) som korrigerats med hjälp av
rx42 -FY/FZ
25. TIREHOOEL : rz- 17590. N
Figur 7. Däckmodell för isunderlag. 18
mindre kompletta data över lastbildäck uppmätta på det aktuella provfordonet på den isbana som användes vid validerings proven.
Dessa lastbilsdäckdata omfattar max-imalt friktionstal i längd- och sidled samt friktionstal vid låst hjul erhållna vid axel-vis bromsning rakt fram och kurvtagning utan bromsning.
Vid simuleringarna användes normalt identiska däckmodeller för fram och bakaxel.
"Sidfriktionstalet har vid simuleringarna antagits oberoende av normalkraften. Detta betyder att fordonet i simulerings modellen är neutralstyrt i obromsat till-stånd.
Simuleringsmöjligheter
Hybridsimuleringsprogrammet bl a simulera
rak bromsning på ett homogent under lag
rak bromsning på ett split friction-un derlag
bromsning i kurva med konstant styr utslag
bromsning i J-kurva med konstant styrutslag
Då i programmet finns inlagt två däck-modeller kan bromsning på underlag med olika friktion för höger och vänster sidas hjul (split friction), studeras.
kan
Validering
Hybridsimuleringarna har genomförts på en befintlig två aXlig dragbil av fabrikat Scania L75. Fordonet är utrustat med tre antilåssystem av olika fabrikat och typ. Samma fordon har använts av VTI vid studium av olika metoder för provning av antilåssystems prestanda. Bromsproven har huvudsakligen utförts på isunderlag. Resultaten från dessa fältmätningar utgör här jämförelsematerial för validering av metoden. Främst studerades följande prov vid hybridsimulering med de tre oli-ka ABS-systemen A, B och C.
Ut-gångshastighet 10 och 20 m/s. Resulta- va med konstant styrutslag motsva-ten visas i tabell 1 och 2 (N = låsta rande 100 m kurvradie anbringat sam-hjul). tidigt med bromsningen. Resultaten vi-Rak bromsning på split frietion-under- sas i tabell 5.
lag. Utgångshastighet 10 m/s. Resulta- Rak bromsning på underlag motsva ten visas i tabell 3. rande M = 0.6. Utgångshastighet 20 Bromsning med samtidig ingång i kur- m/s. Resultaten visas i tabell 4. Tabell I . Rak inbromsning på is. Olastat fordon.
Medelretardation m/s2
System Initial hastighet 10 m/s Initial hastighet 20 m/s Simulering Fåltprov Simulering Fåltprov A 1.40 21001 1.33 i0.1 1.60i0.01
B 1.23 i0.01 1.2010.1 1.47 i0.01 C 1.15 i0.02 0.92i0.1 1.37i0.02 N 1.064 i 0.001 1.04 i 0.07
Tabell 2. Rak inbromsning på is. Lastat Tabell 3. Split friction op, = 0.2/0.6. fordon. Initial hastighet I 0 m/s. Olastat fordon. Initial hastighet 10 m/s.
Medelretardation m/s2 Medelretardation m/s2 System Simulering Fåltprov Systern Simulering Fåltprov
A 1.23 i0.01 1.12i0.1 A 2.39i0.01 2.52i0.1 B 1.05 i0.01 B 1.90i0.02 2.13 10.1 C 1.04 i0.01 C 1.09i0.01 1.01 i0.1 N 0.877 i 0.003 0.68 i 0.05
Tabell 4. Rak inbromsning på högfrik-tionsunderlag.
Medelretardation m/s2
Systems Simulering, Fåltprov2
A 4.65 i 0.02 4.99 i 0.08 B 4.39 i 0.02 4.62 i 0.08 C 3.66 i 0.02 4.5 i 0.08 1 Olastat dragfordon. Initial hastighet 30 m/s. 2 Olastat dragfordon + slåp båda med
antilås-system. Initial hastighet 22 24 m/s.
Tabell 5. Inbromsning med konstant styrutslag anbringat samtidigt med bromsen. Olas-tat fordon. Initial hastighet 11 ms/s.
Medelretardation m/s2 Lateral avvikelse m Girvinkel grader Simul Fåltprov Simul Fåltprov Simul Fåltprov A 1.36i0.02 1.41 i0.01 7.2i0.3 7.2i 1.0 21.61 1.0 23.5i 3 B 1.20i0.01 1.26i0.01 10.2i0.2 11.7i0.8 27.1 i0.5 43 i 7 C 1.09i0.02 0.97i0.1 14.71 1.1 21.5i2.5 33.3i2.5 50 i 10
(Simuleringsvården i tabell 1 5 presenteras med 95 % konfidensintervall. Medelvär-den ifrån fåltproven presenteras med standardavvikelsen.)
System A och B har individuell reg-lering (IR) på bakaxeln samt modifierad individuell reglering (MIR) på framaxeln. System C har axelvis select low reg lering (SLR) dvs anpassning efter hjul med lägsta friktion, på båda axlarna.
Rak inbromsning på is från 10 m/s och 20 m/s med och utan last. Resultaten från fältproven och simuleringarna överensstämmer vad gäller rangord-ningen av de tre olika systemen med avseende på uppmätt medelretarda tion. System C uppvisar vid simule-ringen en högre medelretardation i jämförelse med fältproven.
Split friction (0.2/0.6). Bromsning från 10 m/s utan last. Som framgår av
simuleringsresultat och fältprov (se ta-bell 3) framträder här tydligt SLR-sys-temets svaghet i jämförelse med IR-/MIR-systemen när det gäller uppmätt bromssträcka på split-friction-under-lag.
Bromsning i med konstant styrutslag. Förutom skillnaden i uppmätt medel-retardation för de tre olika systemen framkom vid fältmätövningarna olika grad av överstyrningstendens vid in-bromsningen.
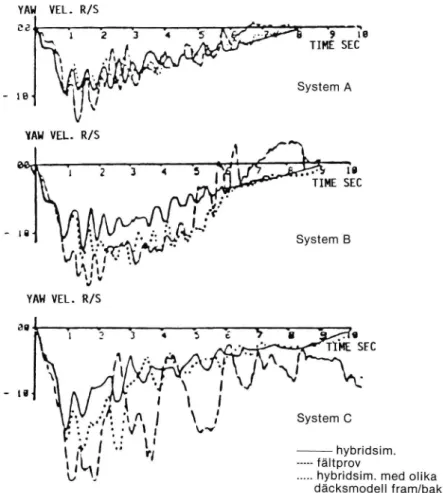
Systemen (B) har en tendens till rota tion under hela inbromsningen, vilket klart framgår av t ex uppmätt girvink elhastighet. Däremot system (C) upp visar en kraftig rotation i början av
YAH VEL. R/S De r v 1 ' v V 1'? A* & = 1 2 3 4 5 Åq/ 9 :e ** » -\ TIME SEC | _.A !. s l ' | ::; | . '. & w System A - 191 & x, b & VAN VEL. R/S M å . !; K/tl w1 Sz '3 ? 5 F to TIME SEC
:
:; .- -' ' i "& System B System C hybridsim. --- fältprov... hybridsim. med olika däcksmodell fram/bak
Fig 8. Fordonets girvinkelhastighet vid bromsning i J-kurva med konstant styrutslag. 20
kurvan därefter stabiliseras rörelsen. Hybridsimuleringen visar tendenser till ett liknande beteende hos de olika systemen, se figur 8.
I figur 8 har däckmodellen för bak-hjulen i en variant modifierats så att fordonet är något överstyrt i bromsat tillstånd. System A påverkas obetyd-ligt av modifieringen. För system B och C förstärks överstyrningstendenserna, vilket ger ett resultat som bättre stäm-mer överens med resultaten från fält-mätövningarna.
Modifieringen kan förankras i det faktum att framhjulen under inbroms ningen polerar isen, vilket sänker frik-tionen för efterföljande bakhjul.
Slutsatser och diskussion
En hybridprovmetod för antilåssystem har utvecklats och med gott resultat till-ämpats på en tung lastbil utrustad med tre olika antilåssystem. Möjligheter att pröva släpfordon föreligger men har inte valide rats inom ramen för detta projekt.
Tekniken skulle efter en utvidgad vali dering vara tänkbar som ett led i typprov ning av tvåaxliga tunga fordon med anti låssystem med elektronisk hjulhastighets-avkänning. Med ännu mindre tidssteg i realtidssimuleringen bör metoden vara användbar även för personbilar. VTI har inom kort datorresurser för detta. Dator modellen kan utvidgas till fyraxliga for-don om datorns kapacitet ökas ytterligare och mätsystemet utökas i motsvarande grad.
Utvecklingen på datorsidan går snabbt och inom inte alltför avlägsen framtid bör det vara möjligt att med måttliga kostna der utvidga datorkapaciteten så att hy bridsimuleringen kan kombineras med VTI:s körsimulator. Det skulle då bli möj-ligt att prova olika förarkategoriers möj ligheter att utnyttja ett visst antilåssystem i ett givet fordon under utvalda repeterba-ra betingelser. Speciellt värdefull är möj-ligheten att prova system/fordon under önskade vinterbetingelser oberoende av årstid och väderleksvariationer.
Referenser
1. Nordmark, S: Utveckling av körsimu-lator. Delrapport: Matematisk for-donsmodell. Statens väg- och trafikins-titut, VTI. Meddelande nr 4, 1976. 2. Uffelmann, F: Berechnung des Lenk
und Bremsverhaltens von Kraftfahr-zeugen auf rutschiger Fahrbahn, Dis sertation TU Braunschweig, 1980.
3. Nordström, O, Nilsson, A, Nilsson, B:
Measurements of tyre-road characteris-tics low-u, variable-;t, high-u. Steerabi lity during Emergency Braking: Swe dish Experimental Safety Vehicle Pro-gram. Report 6 01, Göteborg, 1974. 4. Grim, R A, Bremer, R J, Jain, F J, Le vijoki, W A: Evaluation of vehicle in-stalled wheel lock control hardware with a hybrid computer simulation. So ciety of Automotive Engineers. Paper
nr 77 00 98, Warrendale, PA, 1977. 5. Srinivasa, R, Gunter, R R, Wong, J Y:
Evaluation of the performance of anti lock brake systems using laboratory si mulation techniques. International Journal of Vehicle Design, 1980, vol 1,
nr 5.
6. Segel, L, Ervin, R, Fancher, P:
Mecha-nics of heavy-duty truck combinations. International Assoc for Vehicle De-sign. Proceedings (Open University)
Milton Keynes, UK 1981, Dorgham,
M(ed).
7. Stewart, E E, Bowler, L L: Road
tes-ting of wheel slip control systems in the laboratory. SAE Paper 690215, New York, 1969.
8. Palmkvist, G, Nordström, O: Hybrid
Laboratory Test Method for Antilock Systems. The Dynamics of Vehicles on Roads and Railway Tracks. Procee-dings 7th IAVDSD-Symposium Cam-bridge Mass USA 1983. Swets & Zeit-linger Lisse, Holland.
9. Palmkvist, G, Nordström, O: Hybrid-metod för provning av antilåssystem. STU rapport 79 6145. 1983.