C
Väg-forskningsin
och transport-stitutet Gö ran K Ni Isson Aruhsell
system fö
rande tester och ut
r mätning av MC K ng av olika 4 Nr 759 - 1996 V T1 meddelande ämfö va rderi
V T 1 meddelande
Nr 759 - 1996
Jämförande tester och utvärdering av olika system för mätning av MC -trafik
Utgivare: Publikation: VTI Meddelande 759 Utgivningsår: Projektnummer: Väg- och transport- 1996 30128 fforskningsinstitutet 581 95 Linköping Projektnamn:
Jämförande tester och utvärdering av olika system för mätning av MC -trafik
Författare: Uppdragsgivare:
Göran K Nilsson Aruhsell Vägverket
Titel:
Jämförande tester och utvärdering av olika system för mätning av MC -trafik
Referat (bakgrund, syfte, metod, resultat) max 200 ord:
Vid de trafikmätningar som utförts av Vägverket har motorcykeldata hittills inte redovisats, men Vägverket vill nu börja redovisa flöden och hastigheter även för motorcyklar.
Eftersom det råder osäkerhet om hur Vägverkets mätsystem registrerar motorcyklar fick VTT i uppdrag att undersöka vilka olika mätsystem som kan mäta motorcyklar och hur de fungerar.
Första steget var en litteratursökning som resulterade i en kartläggning av 15 olika mätutrustningar. Beskrivningar och information om dessa studerades varefter deras prestanda och relevans för svenska förhållanden bedömdes. Resultatet blev att två stycken mätutrustningar valdes ut för tester och utvärdering. Det var Vägverkets METOR 2000 och VTI:s TA-89.
Testmätningar ordnades med fem inlånade motorcyklister. Resultaten visade att båda systemen registrerade motorcyklar. Men Metor hade svårigheter att registrera motorcyklar som körde på bortre änden av sensorslangarna. Båda utrustningarna hade problem att göra riktiga registreringar i situationer där motorcyklarna befann sig mycket nära varandra eller annat fordon.
Publisher: Publication:
VTI Meddelande?759
Published: Project code:
Swedish National Road and 1996 30128
Å Transport Research Institute
S-581 95 Linköping Sweden Project:
Comparative tests and evaluation of different devices for measuring motorcycle traffic
Author: Sponsor:
Göran K Nilsson Aruhsell Swedish National Road Administration
Title:
Comparative tests and evaluation of different devices for measuring motorcycle traffic
Abstract
Until now motorcycle data have not been reported in the traffic measurements carried out by the National Road Administration, but from now on the Road Administration will also start reporting motorcycle flows and speeds.
As there is no definite indication of how the Road Administration's measuring device registers motorcycles, the VTI was commissioned to study different measuring devices for motorcycles and the performance of the devices.
The first step was a literature search resulting in a survey of 15 different measurement devices. Descriptions and information were studied, after which performance characteristics and relevance to Swedish conditions were evaluated. This resulted in two measuring devices being chosen for testing and evaluation. These were the National Road Administration's METOR 2000 and the VTT s TA-89.
Test measurements were arranged with five motorcyclists. The results showed that both devices registered motorcycles, but the METOR had difficulties in registering motorcycles at the far end of the sensor tubes. Both devices had problems in carrying out correct registrations in situations where motorcycles were close to each other or to another vehicle.
FÖRORD
Föreliggande projekt är gjort på uppdrag av Vägverket. Kontaktman har varit P.G. Land.
Projektet kom till stånd på grund av att Vägverket ville börja redovisa trafikdata för motorcyklar. I undersökningen skulle olika mätsystem testas och utvärderas.
Vid undersökningen av marknaden för mätsystem har vi haft god hjälp av Mats Lundström på Vägverkets trafikdataavdelning och av VTTI:s informationsavdelning som gjort litteratursökning.
Vid de praktiska testerna har Per Anund och Håkan Wilhelmsson varit behjälpliga med mätningar. Som testförare ställde följande upp: Lars Engelbrektsson, Svante Grenestam, Lars Karlsson, Gunnar Paakkari och Bengt Sandberg. Trafikskolorna Calle och J-P:s och Lindéns lånade ut en motorcykel.
För utskriften har Annette Karlsson svarat. Projektledare har varit Göran K Nilsson Aruhsell, som tackar de medverkande för värdefulla insatser.
INNEHÅLLSFÖRTECKNING SID
SAMMANFATTNING I
SUMMARY III
1 BAKGRUND OCH SYFTE 1
2 METOD 2
2.1 Litteratursökning 2
2.2 Kartläggning 2
2.3 Mättest 2
3 KARTLÄGGNING AV UTRUSTNING 4
3.1 Litteratursökning och förfrågningar 4
3.2 Kartläggning av mätutrustningar 5 3.3 Mätsystem METOR 2000 7 3.3.1 Systembeskrivning 7 3.3.2 Databehandling 7 3.4 Mätsystem TA-89 8 3.4.1 Systembeskrivning 8 3.4.2 Databehandling 8 3.5 Mätsystem Marksman 660 9 3.6 Mätsystem Datarec 410 9 4 RESULTAT 10 4.1 Mättest på VTT:s gård 10 4.2 Mättest på landsväg 11
4.2.1 Mätning av MC utan interaktioner med annan trafik 13
4.2.2 Variansanalys 17
4.2.3 Mätning av MC vid några olika interaktioner med annan trafik 18
5 DISKUSSION 24
6 REFERENSER 26
BILAGOR
Bilaga 1: Variansanalys med avseende på hastighetsdifferens Bilaga 2: Tabeller över passager med interaktioner
Jämförande tester och utvärdering av olika system för mätning av MC -trafik.
av
Göran K Nilsson Aruhsell
Statens väg- och transportforskningsinstitut (VTT) 581 95 LINKÖPING
SAMMANFATTNING
Trafikdata för motorcyklar har hittills ej mätts och analyserats i samma omfattning som för bilar. VTI har samlat in motorcykeltrafikdata men endast analyserat en mindre del av det. Nu mäter Vägverket hastigheter på det svenska vägnätet för att följa hastighetstrenderna, men det råder osäkerhet om hur deras mätsystem registr-erar motorcyklar.
VTI fick i uppdrag att undersöka hur olika mätsystem mäter MC -trafik och att göra en utvärdering av hur systemen fungerar. Första steget var att göra en littera-tursökning vilken VTT:s bibliotek hjälpte till med. Det gjordes också förfrågningar till olika transportforskningsinstitut och liknande i utlandet. Genom de svar vi fick in och genom personliga kontakter hittade vi 15 olika mätutrustningar.
Beskrivningen av dessa studerades, och kontakter togs med en del representanter för mätsystemen, för att kunna göra en bedömning av mätsystemens funktion och prestanda. En del kunde gallras bort ganska snabbt medan andra krävde mer ingå-ende undersökningar.
Till slut återstod endast två mätutrustningar, nämligen METOR 2000 och TA-89. Dessa två mätutrustningar skulle testas och utvärderas. Ett första test gjordes på VTT:s gård där en 13-metersväg målades upp. Mätapparaterna sattes upp tillsam-mans med en videokamera. Av detta första test fann vi att apparaterna kunde registrera motorcyklar och att valt mätarrangemang fungerade.
Därefter gjordes en testmätning på riktig landsväg. Ett test gjordes så att motor-cyklarna fick köra i olika sidolägen på vägen. Detta visade att METOR hade svårt att registrera pulser från bortre kantlinjen och bortre vägrenen.
II
momenten att köra nära annat fordon, att möta annat fordon och att bli omkörd av annat fordon.
Resultatet visar att båda mätsystemen ibland har problem med att göra korrekta registreringar. Det gäller oftast när motorcyklar ligger nära efter varandra eller när de möts nära mätpunkten.
III
Comparative tests and evaluation of different devices for measuring motorcycle traffic
by
Göran K Nilsson Aruhsell
Swedish National Road and Transport Research Institute (VTT) S-581 95 LINKÖPING
Sweden
SUMMARY
Until now, traffic data for motorcycles have not been measured and analysed to the same extent as for cars. The Institute has collected motorcycle traffic data but only a minor part has been analysed. The National Road Administration currently measures speeds on the Swedish road network in order to follow the speed trends, but there is uncertainty about how its measuring devices register motorcycles.
The Institute was commissioned to study how different measuring devices measure motorcycle traffic and to evaluate the function of these devices. The first step was to carry out a literature surveys with the aid of the Institute's library. Requests were sent abroad to various transport research institutes, etc. Fifteen different measuring devices were found through replies and personal contacts.
To be able to judge the function and performance characteristics of the measuring devices, descriptions of the devices were studied and representatives were contacted. Some could be eliminated fairly quickly, while others required more thorough studies.
Finally, only two measuring devices remained, METOR 2000 and TA-89. These measuring devices were then tested and evaluated. The first test was carried out on a paved area at the Institute, where a 13-metre wide road was painted. The measuring devices were arranged together with a video camera. This first test proved that the devices were able to register motorcycles and that the chosen measurement arrangement worked satisfactorily.
Measurements on a main road were then carried out. A test where motorcycles drove in different lateral positions on the road was performed. It was then found
IV
that the METOR had difficulties in registering pulses from the far end of the edge line and shoulder.
Measurements were also carried out with different interactions between motorcycles and other vehicles. The interactions were deliberately complicated and consisted of operations such as driving close to another vehicle, confronting an oncoming vehicle and being overtaken by another vehicle.
The result shows that sometimes the two measuring devices does not register correctly. That happens often when motorcycles are close after each other, or close in meeting situations.
1 BAKGRUND OCH SYFTE
Hittills har trafikdata för motorcyklar ej analyserats i större utsträckning. En an-ledning kan vara att motorcyklarna utgör en liten del av trafiken och förekommer nästan bara på sommarhalvåret.
Att enbart se till det lilla trafikarbete som motorcyklarna uträttar är dock att under-skatta MC-trafikens betydelse. Framför allt trafiksäkerhetsmässigt har motorcyk-larna stor inverkan. Riskerna att råka ut för en olycka som förare av motorcykel är betydligt större än som förare och passagerare i bil och skadorna blir oftast allvar-ligare eftersom MC-föraren sitter oskyddad. MC-föraren är därtill ofta en yngre manlig person med begränsad körerfarenhet. Denna förarkategori löper större risk att bli inblandade i olyckor, vilket kan utläsas av SCB:s skadestatistik.
Mätningar som tidigare gjorts visar att motorcyklar håller högre hastighet och överskrider hastighetsgränser i högre grad än personbilar. Se VTI Meddelande 436 "MC-hastigheter på landsväg" referens (1). Det framkom att under sommarhalv-åren 1980-1984 var genomsnittliga skillnaden i medelhastighet mellan motor-cyklar och personbilar 11 km/h på 70-vägar, 7 km/h på 90-vägar och 5 km/h på
110-vägar.
Att samla in trafikdata om motorcyklar är mer problematiskt än för andra fordons-typer eftersom de är svårare att detektera. Det beror i sin tur på att de är lättare och ger svagare pulser i givarna än vad bilarna ger. Dessutom är mätsystemen i första hand utvecklade för att mäta bilar.
Detta projekt syftar till att studera hur mätning och analysering av MC-data görs med olika mätsystem.
2 METOD
2.1 Litteratursökning
Första steget var att genom en litteraturstudie försöka få fram befintliga system som kan mäta motorcykeltrafik. Detta genomfördes med hjälp av VTTI:s bibliotek. Sökningar gjordes i databasen Roadline och vi fick på så sätt fram listor på littera-tur som behandlade trafikmätningsutrustningar.
Dessutom sändes det ut förfrågningar angående trafikmätningsutrustningar till transportforskningsinstitut och liknande i England, Tyskland, Frankrike, Belgien, Holland, Österrike, Schweiz, USA, Canada, Australien samt de nordiska länderna.
2.2 Kartläggning
Från litteraturstudien, förfrågningarna och personliga kontakter fick vi in beskriv-ningar på 15 olika mätutrustbeskriv-ningar. Beskrivbeskriv-ningarna studerades beträffande funk-tion och presentafunk-tion av mätresultat med avseende på motorcyklar. Bedömningen av apparaterna fick göras mer ingående för en del medan andra kunde gallras bort ganska snabbt. För några av apparaterna fordrades det flera kontakter innan deras prestanda kunde bedömas. Kvar att testa blev två apparater vilket redovisas i nästa kapitel.
2.3 Mättest
Testerna genomfördes på följande sätt. Apparaterna sattes upp i samma mätpunkt tillsammans med en videokamera med klocka i bilden för att kunna kontrollera registreringarna.
Första testmätningarna gjordes med två "egna" motorcyklar på VTI:s gårdsplan. Slangar spändes upp över en bredd som motsvarade en 13-metersväg. Sedan körde motorcyklarna enligt ett körschema med passager i olika hastigheter och i olika sidolägen. Körschemat finns beskrivet i resultatavsnittet.
Andra testmätningsomgången gjordes i vanlig trafik på en 13-metersväg med has-tighetsgränsen 110 km/h. Här kördes efter ett schema som till första delen liknade
det som gjordes på VTT:s gård. Det utökades med hastighetsnivåerna 90 och 110 km/h samt körningar där interaktion med andra fordon förekom. Exempelvis skulle man köra nära efter annat fordon eller möta andra fordon på mätplatsen för att se hur mätutrustningarna fungerade i komplicerade situationer.
Mätningarna behandlades med respektive mätsystems utvärderingsprogram och resultaten jämfördes med videofilmen. Först undersökte vi de enskilda passagerna av respektive MC i olika hastigheter och sidolägen. Hastighetsdifferenserna mel-lan mätapparaterna undersöktes med hjälp av variansanalys. Sedan studerades passager med interaktion av andra fordon. Dessa ordnades efter typ av interaktion och registreringsutfall.
3 KARTLÄGGNING AV UTRUSTNING
3.1 Litteratursökning och förfrågningar
Den första delen av undersökningen bestod av en kartläggning och inhämtning av uppgifter av de i dag existerande mätsystemen som kan mäta motorcykeltrafik. Först gjordes en litteratursökning i Roadline om vad som finns skrivet om trafik-mätningar.
Litteratursökningarna på VTT tillsammans med litteraturlistor vi fått oss tillsända resultaterade i 37 titlar.
En del av de publikationer som vi fick fram vid litteratursökningarna handlade om mätutrustningar, andra om beskrivningar av eller prov med sensorer av olika slag och andra var resultat från stora mätprogram.
Genom litteratursökning, förfrågningar och personliga kontakter hittade vi föl-jande 15 olika mätutrustningar.
Apparatnamn Tillverkare
1. METOR 2000 Industrielektronik i Växjö
2. METOR 4000 multi Industrielektronik i Växjö
3.TA-89 Statens Väg- och Transportforskningsinstitut, Linköping
4. PTA Statens Väg- och Transportforskningsinstitut, Linköping
5. Marksman 600 Golden River, England/USA
6. Marksman 660 Golden River, England/USA
7. GK 5000 Peek/GK Instruments, England/Holland
8. GK 6000 Peek/GK Instruments, England/Holland
9. Datarec 410 Datainstrument AS, Norge
10. SCC 90 Dinaf Verkeerstechniek B.V., Holland
11. HI-STAR
12. VDAS 2000
13. VDAS 3000
Nu-metric, USA
Australian Road Research Board Ltd., Australien
Australian Road Research Board Ltd., Australien
14. TDP-TA TrafikDataProdukter, Borlänge
15. TMS-06 Institutionen för trafikteknik, Thord Lundgren/LTH, Lund
3.2 Kartläggning av mätutrustningar
Beskrivningarna till respektive apparater studerades, tillverkare och/eller använ-dare intervjuades om apparaternas prestanda. Här nedan följer en lista med kom-mentarer om respektive apparat.
Apparatnamn 1. METOR 2000 2. METOR 4000 multi 3. TA-89 4. PTA 5. Marksman 660 6. Marksman 600 7. GK 5000 Kommentarer
Fungerar bra för mätning av bilar.
Enligt VV:s trafikdataenhet är det problem med pulsomvandlaren som inte alltid känner av en luftpuls från en MC om den kör över slangen för långt från apparaten.
Nyligen framtagen prototyp med större minne och fler ingångar än föregångaren METOR 2000.
Kan mäta MC.
Kan mäta MC efter omprogrammering.
Endast ett körfält. Tejpade kablar som nöts bort ganska fort. Minne 10 000 fordon.
Kan mäta MC efter modifiering av redovisningspro-gram.
Programmet "Count on me" finns för mätning med slingor.
Mäter hastighet med magnetslinga. Enligt uppgifter från VV region Väst, är det problem med att klassifi-cera motorcyklar, hastigheter registreras.
8. GK 6000 Mäter med slingor. Minsta fordonslängdsklass ©2.99 m. Skiljer ej på MC och personbilar.
9. Datarec 410 Mäter med slingor eller piezoelektriska kablar. Ej till-gänglig för test vid projektets genomförande.
10. SCC 90 Mäter med slingor. Ger endast 4 hastighetskategorier vid längdmätning.
11. HI-STAR En platta som lägges på vägen. Mäter fordonslängd med noggrannheten + 5 fot.
12. VDAS 2000 Begränsad lagringskapacitet. Slangar eller kablar. E; tillgänglig.
13. VDAS 3000 Som ovan men kan lagra data i fler format. Ej tillgäng-lig.
14. TDP-TA En äldre konstruktion som har samma sensorer som TA-89 (TDP 105). Numera säljer man Metor istället.
15. TMS-06 Har ej utvärderingsprogram. Ger ASCIHN-fil direkt med individuella axeldetekteringar.
Flera av dessa apparater kan mäta motorcyklar men endast två nämligen Metor 2000 och TA-89 bedömdes lämpliga för testmätning. Dessa två mätutrustningar kan detektera motorcyklar och har utvärderingsprogram som kan redovisa denna fordonstyp.
Det har varit svårt att jämföra de olika mätutrustningarna punkt för punkt eftersom de är konstruerade på olika sätt. Beskrivningarna är också olika, en del är utförliga och en del är kortfattade. Därför har apparater förkastats eller accepterats beroende på olika egenskaper.
De mätsystem som vi funnit som i dagsläget kan mäta och urskilja motorcyklar från andra fordon och är tillgängliga är Vägverkets METOR 2000 och VTI:s TA-89. Flera andra, t.ex. Golden Rivers Marksman 660 och Norska Datainstru-ments Datarec 410 kan framledes komma att visa sig intressanta.
Här följer en kortfattad beskrivning av de två mätsystemen METOR 2000 och TA-89. Utförligare beskrivning finns, se referens (2), (3) och (4).
3.3 Mätsystem METOR 2000
3.3.1 Systembeskrivning
Metor har utvecklats på initiativ från Vägverket och tillverkas av Industrielektro-nik i Växjö AB. Apparaten fungerar så att den samlar in pulser från passerande hjulaxlar samt tidpunkten för dessa i millisekunder. Därefter sker en konvertering till olika fordonstyper. Sensorer är två gummislangar som ligger tvärs över vägen.
Bearbetning och lagring av data kan ske på olika sätt. Vid normal drift görs en databearbetning som summerar för varje fordonstyp och räknar ut hastighetsme-delvärden per timma. Detta sker för att spara på minnesutrymme. Apparaten kan även arbeta i en mode som sparar enskilda fordon, men detta fordrar mycket större utrymme i minnet. Minneskapaciteten är 512 kByte. Vid lagring av timmedelvär-den är drifttitimmedelvär-den > 5 veckor. Vid lagring av varje enskilt fordon ryms ca 23 000 fordon.
3.3.2 Databehandling
Program i högnivåspråket C och assembler detekterar och tidsmärker pulserna. Eftersom systemet är gjort för att mäta trafikflödet, gör METOR i första hand imputationer av fordon istället för att bara redovisa en restkod. Med imputation menas att en ofullständig registrering ersätts med ett sannolikt fordon. Detta görs med hjälp av statistik som bygger på föregående registreringar av trafiken på plat-sen.
METOR.EXE sköter kommunikation med PC, överföring av data från Metor till PC och detta program ger också en enkel redovisning.
Teknisk beskrivning finns i Systemteknisk handbok för METOR 2000, se refe-rens (2).
3.4 Mätsystem TA-89
3.4.1 Systembeskrivning
TA-89 är ett mätsystem som är framtaget på VTT och uppbyggt kring en mätappa-rat med samma namn. Mätappamätappa-raturen TA-89 har sex ingångar för axeldetektorer som ger digitala elektriska signaler. Normalt används två av ingångarna som är benämnda A och B. Varje gång en fordonsaxel passerar över en av detektorerna registreras tidpunkten för passagen och vilken givare som passagen gäller. Senso-rerna utgörs av gummislangar. Noggrannheten i tidsangivelsen kan väljas till 1 millisekund eller 1/10 millisekund. Det finns också möjlighet att mäta luft- och vägbanetemperatur, luftfuktighet, vindhastighet och vindriktning.
Samtliga registreringar lagras i RAM (elektroniskt minne). TA-89 finns i två vari-anter med olika stort minne, en på 512 kByte vilket räcker till att lagra registre-ringar från ca 25 000 personbilar och en med fyra gånger så stort minne, dvs. 2 MByte och 100 000 fordon.
3.4.2 Databehandling
Ett assemblerprogram i TA-89:an registrerar pulser och sköter kommunikationen med PC. Ett program som heter BINCHK kontrollerar att överföringen och att data har rätt format.
Efter mätningen överföres data från det fasta minnet till en bärbar PC. Därefter överförs data till en stationär PC lämpligen en 286/386/486. Här bearbetas data av ett program varvid axelregistreringarna omvandlas till fordon, se VTI Notat 147, referens (3).
Teknisk beskrivning finns i PM kallat "Universellt trafikmätningssystem", se re-ferens (4).
3.5 Mätsystem Marksman 660
Golden Rivers system Marksman 660 kan enligt uppgift mäta motorcyklar men redovisningsprogram var ej färdigt vid undersökningens genomförande enligt uppgift från Olsen Engineering i Roskilde. Det kan således bli intressant att fram-ledes undersöka det närmare.
3.6 Mätsystem Datarec 410
Datarec 410 är ett norskt system som i nuläget är svårt att testa eftersom det dels fordrar nedfrästa piezoelektriska kablar för att kunna mäta motorcyklar, dels för att det är oklart med redovisningen. Det finns skäl att framledes följa utveckling av mätsystemet.
10
4 RESULTAT
4.1 Mättest på VTTI:s gård
Jämförande testmätningar i fält gjordes med de två apparaterna, METOR 2000 och TA-89. Den första testmätningen skedde på VTTI:s gård. Vi ville undersöka om apparaterna verkligen registrerade motorcyklar och att mätarrangemangen och körschema fungerade. En 13-metersväg målades upp och givarslangar lades ut. För att kunna kontrollera respektive apparats registreringar efteråt filmades försö-ket av en videokamera, med tid inlagd i bilden. Två motorcyklar körde fram och tillbaka över slangarna enligt nedanstående körschema.
Körschema och anvisningar för mättest på VTT:s gård
TA-89- och Metor-test med två tunga MC. BMW 75 och Yamaha 600. Båda apparaterna har en A- och B-slang med 3,3 m mellanrum och förskjutna 0,5 m.
På VTTI:s gård märktes upp en 13 m bred väg med vägrenar. Mätpunkten skulle passeras enligt följande sex punkter:
1 Mitt i körfältet:
30 km/h riktning 1 och riktning 2 50 km/h riktning 1 och riktning 2 70 km/h riktning 1 och riktning 2
2 På kantlinjen:
samma hastigheter och riktningar som ovan
3 På vägrenen:
samma hastigheter och riktningar som ovan
4 Köra nära efter varandra i samma hastighet ca 50 km/h.
5 Köra nästan parallellt med varandra i samma hastighet ca 50 km/h.
6 Möte över slangarna.
11
Vi fann att mätarrangemanget fungerade och att apparaterna registrerade motor-cyklar. Vi upptäckte även att långsamtgående motorcyklar, hastighet lägre än 30 km/h, var svåra att detektera för båda apparaterna, och att Metor hade problem med att detektera motorcyklar som passerade i bortre ändan av slangarna räknat från apparaten.
4.2 Mättest på landsväg
Nästa steg blev att ytterligare tre motorcyklister engagerades till ett nytt test och en vacker höstdag åkte vi ut på en 13-metersväg, Rv 36 några km norr om Linköping vid Vreta Klosters f.d. järnvägsstation. Där lades apparater och slangar ut och videokameran kunde monteras på en bro som gick över vägen och mätplatsen. Här utökades körprogrammet med högre hastigheter och interaktioner med andra for-don.
Eftersom motorcyklarna ute i trafiken är olika, sökte vi också få en viss variation på storlekar och vikter. De fem motorcyklar vi fick fram var av fyra olika modeller varav en, Honda 125, var av typen lätt motorcykel. De fem olika ekipagen var följande:
MC-typ Beteckning Förare Totalvikt
inkl. förare
1. BMW 75 BMW 75G S.Grenestam ca 325 kg
2. BMW 75 BMW 75P G.Paakkari ca 325 kg
3. Yamaha 600 Yamaha 600 B.Sandberg ca 270 kg 4. Honda 400 Honda 400 L.Karlsson ca 230 kg 5. Honda 125 Honda 125 L.Engelbrektsson ca 215 kg
12
Körschema och anvisningar för mättest på landsväg.
Apparaterna placerades i diket öster om körbana i riktning 2, mot Vreta Kloster, så att METOR ligger först räknat i denna riktning. Sensorslangarna A och B monte-rades på ett avstånd av 3,3 m och förskjutna 0,4 m mellan apparaterna. Slangarna är 16,9 m långa. Från fästet vid asfaltskanten till respektive apparat var det 3,8 m slang. Slangarna spänndes så att det på andra sidan vägen blev 3 m slang utanför asfaltskanten. Se figur 1 nedan.
| KB - -> ha
on ama gan dn, dan ga dem fn f assa
&! a
2104
,
-T
=-)
3,4
Figur 1
Mätarrangemang.
Mätningarna har gått till så att motorcyklarna först har fått köra en vända var över
mätplatsen i olika hastigheter och med olika sidolägesplacering av fordonen,
sedan har vi sökt åstadkomma situationer där motorcyklarna interagerar med andra
fordon på och nära mätplatsen.
Varje MC-förare skulle försöka köra enligt följande körschema bestående i 7
punkter:
13
1 Mitt i körfältet ensamma fordon:
1 50 km/h R] + R2 2 70 km/h R! + R2 3 90 km/h RI! + R2 4 110 km/h RI! + R2
2 På kantlinjen ensamma fordon: samma turer som ovan.
3 På vägrenen ensamma fordon: samma turer som ovan.
4 Köra "parallellt" med annan MC i samma hastighet i körfältet ca 70km/h. Den ena något före den andra. En gång i riktning / och en gång i riktning 2.
5 Möte över slangarna. Varje MC i var sitt körfält. Ca 70 km/h. En gång i riktning / och en gång i riktning 2.
6 Köra så att man möter bilar över slangarna. Ca 70 km/h. En gång i rikting / och en gång i riktning 2.
7 Köra så MCn blir omkörd av bil.
4.2.1 Mätning av MC utan interaktioner med annan trafik. Punkt 1-3.
Första delen består av att varje motorcykel med olika hastigheter kör över senso-rerna, först i riktning 1 och sedan i riktning 2. MC-förarna har uppmanats att i första vändan försöka hålla hastigheten 50 km/h, andra 70, tredje 90 och fjärde
110 km/h.
Det visade sig vara svårt att hålla exakt dessa hastigheter beroende på inverkan från annan trafik, olika motorstyrka och vindkänslighet och att hastighetsmätarna får antas visa lite olika hastigheter. Svårast var det för den lätta motorcykeln att hålla önskad hastighet. Men det viktiga var inte att få exakt lika hastigheter utan att få en spridning inom ett område som kan vara representativt för vanliga MC-hastigheter. Vi kunde dock inte medvetet överskrida hastighetsgränsen. Resultatet visas i nedanstående tabell med av respektive mätutrustning registrerad hastighet. Första raden visar resultat från Metor och andra raden resultat från TA-89.
Be-Tabell 1
14
Motorcyklarna kör mitt i KÖRFÄLTET i båda riktningarna.
Riktn 75 G Hastighet ca 50 km/h. R1 54 54,0 R2 50 50,0 Hastighet ca 70 km/h. R1 66 66, 1 R2 63 63,3 Hastighet ca 90 km/h. R1 81 82,5 R2 77 77,7 Hastighet ca 110 km/h. R1 98 97,7 R2 98 98,5 BMW 75 P 44 44,1 ingen körning 65 65,3 64,6 89 89,4 87 87,4 109 109,3 106 105,8 Honda 400 533 53,0 46 46,7 71 71,5 67 67,2 85 85,6 85 86,2 110 109, 1 108 107,9 Yamaha 600 47 46,7 48 48,7 69 68,6 66 66,2 85 86,6 91 92,0 107 107,5 110 110,4 Honda 125 46 46,2 47 47,1 64,8 60 60,0 85 86,2 84 84,0 97 97,9 94 95,0 Mät-utr MET TA MET TA MET TA MET TA MET TA MET TA MET TA MET TA
Motorcyklarna körde mitt i respektive riktnings körfält, dvs. mitt emellan mittlin-jen och kantlinmittlin-jen. Resultatet blev att båda apparaterna registrerade MC-passa-gerna riktigt. En körning i hastighetsklass 50 km/h och riktning 2 blev inte utförd.
15
Tabell 2 Motorcyklarna kör på KANTLINJEN i båda riktningarna.
Riktn 75 S BMW 75 P Honda 400 Yamaha 600 Honda 125 Mät-utr
Hastighet ca 50 km/h.
R1 (imp.Pb möte) 47 50 imp.Pb 56 MET
42,9 46,8 50,7 42,9 56,1 TA
R2 46 46 45 40 47 MET
46,7 47,0 45,7 40,2 47,2 TA
Hastighet ca 70 km/h.
R1 81 63 63 68 (imp.Pb möte) MET
81,3 63,5 63,9 69,0 (rest.möte) TA
R2 63 66 64 66 66 MET
62,9 66, 1 64,7 66,3 66,5 TA
Hastighet ca 90 km/h.
R1 imp.MC 86 83 87 imp.MC MET
94,1 86,0 83,3 87,8 84,0 TA
R2 96 85 79 88 84 MET
97,6 85,4 79,3 88,9 84,5 TA
Hastighet ca 110 km/h.
R1 ingen 108 102 imp.Pb imp.Pb MET
körning 107,7 102,1 109,0 102,0 TA
R2 ingen 106 102 111 93 MET
körning 106,5 101,5 110,7 93,6 TA
Körning på kantlinjen resulterade i lyckade registreringar för båda apparaterna i riktning 2. I riktning 1 imputerades fem passager av Metor och en restpassage re-gistrerades av TA-89. "Ofrivilligt" möte orsakade två imputationer för METOR och en restkod för TA-89 i riktning 1. Av imputeringarna blev tre st personbilar och två st MC. Två körningar i hastighetsklass 110 km/h i rikting 1 och riktning 2 blev inte utförda.
16
Tabell 3 Motorcyklarna kör på VÄGRENEN i båda riktningarna.
Riktn -BMW 75 S Hastighet ca 50 km/h. R1 imp.MC 50,0 R2 47 47,7 Hastighet ca 70 km/h. R1 82 82,1 R2 63 63,5 Hastighet ca 90 km/h. R1 82 82,3 R2 ingen körning Hastighet ca 110 km/h. R1 imp.MC 99,5 R2 100 100,3 (imp.Lbmöte) 82,6 85 86,6 imp.Pb 108,5 105 105,8 BMW 75 P Honda400 46 52 45,7 51,8 45 50 45,6 50,7 68 66 67,8 65,8 62 68 62, 1 68,6 85 84,9 79 79,5 103 102,6 102 103,8 Yamaha600 imp.Pb 53,2 49 48,6 imp.MC 70,1 67 67,1 imp.Pb 84,0 84 84,4 imp.MC 107,3 112 112,3 Honda 125 ej reg. 51,2 48 48,1 imp.Pb 65,3 64 64,6 imp.Pb 82,9 83 83,9 imp.Pb 100,9 Mät-utr MET TA MET TA MET TA MET TA MET TA MET TA MET TA (imp.Pbmöte) MET 92,2 TA
Körning på vägrenen medförde, för METOR, 10 imputeringar och en missad registrering i riktning 1. Av imputeringarna blev sex st bilar och fyra st MC. En körning i hastighetsklass 90 km/h och riktning 2 blev inte utförd.
17
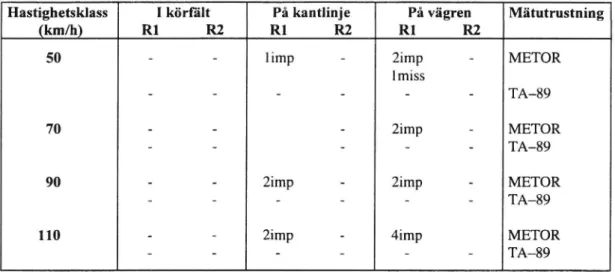
Tabell 4 Sammanfattning av felaktiga registreringar i mättestet utan inter-aktioner mellan motorcyklarna.
Hastighetsklass I körfält På kantlinje På vägren Mätutrustning
(km/h) R1 R2 R1 R2 R1 R2
50 - - limp - 2imp - METOR
I miss
- - - TA-89
70 - - - 2imp - METOR
- - - TA-89
90 - - 2imp - 2imp - METOR
- - - TA-89
110 - - 2imp - 4imp METOR
- - - TA-89
Av imputationerna orsakade av motorcyklar i tabellen ovan blev 12 st personbilar och en lastbil. Fem stycken blev imputerade som motorcyklar. Den omvända fel-typen då andra fordon registreras som MC har studerats särskilt i punkt 8 nedan.
Av tabellerna ser vi att sidoläge och riktning har betydelse för om en motorcykel skall registreras eller ej. I tabellen ovan som sammanfattar felaktiga registreringar ser vi att dessa i alla utom ett fall gäller Metor och är koncentrerade till kantlinjen och vägrenen i riktning 1, dvs. i den ände av slangen som är längst bort från mätapparaten.
4.2.2 Variansanalys
Vi studerar hastighetsdifferensen mellan de två apparaterna med hjälp av vari-ansanalys. För att kompensera för att slangarna till de båda apparaterna eventuellt inte ligger på lika avstånd från varandra på vägen viktar vi hastigheten med det av respektive apparat uppmätta axelavståndet.
De variabler som mätts upp och kan tänkas påverka hastighetsdifferensen blir då: ekipaget (förare + MC). De har olika vikter, olika starka motorer och förarna kan tänkas köra lite olika vad beträffar acceleration-retardation. En annan variabel är hastighetsklass. Exempelvis blir luftpulsen kortare men kanske mer distinkt vid högre hastighet. Körriktning och sidoläge kan ha betydelse eftersom det påverkar hur lång väg luftpulsen måste gå i slangen innan den når pulsomvandlaren.
18
ha betydelse då t.ex. temperaturen förändras med tiden, vilket kan påverka både apparat och givare/slangar. Slangarna kan också töja sig med tiden.
Först gjordes en analys av samspelseffekter som visade att inga signifikanta sådana förelåg.
Vid en fortsatt analys finner vi att tidpunkten och körriktningen inte medför några signifikanta skillnader i hastighetsdifferensen. Därför görs variansanalys med endast hastighetsklass, ekipage och sidoläge som förklarande variabler. Resultatet blir att hastighetsklass och ekipage fortfarande medför statistiskt signifikanta skillnader i hastighetsdifferensen, medan sidoläget inte ger signifikanta skillnader. Utskrift av variansanalysen finns i bilaga 1.
4.2.3 Mätning av MC vid några olika interaktioner med annan trafik. Punkt 4-8
I föregående del ville vi undersöka om det fanns "grundläggande" avvikelser mel-lan mätresultaten. Nu vill vi se hur apparaterna klarar "svårare" situationer.
Mätdata finns listade i tabellform i bilaga 2.
19
4. Fordon NÄRA efter varandra
Förarna uppmanades att köra över slangarna nästan samtidigt eller nära annan MC eller bil.
1. T första fallet passerar Yamaha 600 ca 0,7 sek före en personbil men håller ut på vägrenen vilket medför en svagare luftpuls. Detta medför att Metor impu-terar en personbil med släp och TA-89 regisimpu-terar riktigt en MC och per-son bil.
2. TI andra fallet åker BMW 75G och Honda 400 mycket tätt efter varandra. Första motorcykelns bakhjul "skuggar" den andras framhjul. Det registreras som ett treaxligt fordon av oidentifierbar typ av båda mätutrustningarna.
3. I fall tre passerar Honda 400 och BMW 75G med ca 0,2 sekunders mellan-rum. Detta ger hos Metor ett oidentifierbart fordon med fyra axlar medan TA-89 registerar riktigt två MC, beroende på en specialfunktion i utvärde-ringsprogrammet som delar ett fyraxligt fordon i två fordon.
4. BMW 75P och Yamaha 600 åker parallellt över slangarna. Resultatet blir registrering av en MC hos båda apparaterna och ett axelavstånd mitt emellan motorcyklarnas verkliga axelavstånd.
5. Samma körning som i fyran resulterar i oidentifierbart fordon med tre axlar hos Metor och personbil hos TA-89.
6. Samma som punkt 5.
7. BMW 75P åker nära efter Yamaha 600. Mötande personbil kommer mitt emellan motorcyklarna. Första MC:n och personbilen registreras riktigt av båda utrustningarna. Andra MC:n registreras som MC men får för kort axelavstånd i Metor och blir en restpassage i TA-89.
Kommentar
Metor har i fall 2, 4, 5 och 6 ej givit helt korrekta registreringar och detta beror förmodligen på en alltför komplicerad trafiksituation i förhållande till sensorernas snabbhet.
I fall 1, 3 och 7 har det blivit fel.
TA-89 har registrerat 1 och 3 riktigt.
I fall 2, 4, 5 och 6 blev det ej helt korrekta registreringar men det beror förmodli-gen på en komplicerad trafiksituation i förhållande till sensorernas snabbhet. I fall 7 har det blivit fel.
20
5.Möten MC - MC
MC -förarna skulle försöka mötas i närheten av slangarna för att se hur apparaterna klarade registreringen. Det visade sig svårt att komma samtidigt till slangarna, men efter lite träning och när hastigheterna sänktes så gick det bra.
Ett möte mitt över slangarna innebär att en axel från vardera fordonet kan träffa en slang samtidigt eller kan komma så tätt att de försvinner på grund av apparaternas blockeringstid.
Dvs. ju mer "perfekt" ett möte är desto svårare kan det vara att detektera varje fordon. Avståndet mellan Metor och TA-89 slangarna är 0,4 m vilket medför en tidsskillnad på 16 ms för ett fordon som passerar i 90 km/h. Det betyder att vid möte så registrerar den ena apparaten situationen 16 ms senare än den andra. Detta förklarar till en del skillnaderna i resultat.
1. BMW 75P möter Yamaha 600 båda apparaterna misslyckas. Metor imputerar två personbilar. TA-89 ger en personbil med släp och en restpassage.
2. Samma körning som i 1. Metor imputerar två personbilar och TA-89 ger en personbil och en restpassage.
3. Honda 400 möter BMW 75G. Metor registrerar båda motorcyklarna riktigt. TA-89 ger en restpassage och en MC.
4. Samma körning som 1. Metor imputerar en personbil och TA-89 ger en rik-tig registrering av två MC.
5. Yamaha 600 möter den andra BMW 75G. Metor ger två MC med fel axelav-stånd och TA-89 ger en restpassage och en riktig MC.
6. Samma körning som 1. Båda ger två riktiga MC.
Kommentar
Metor har klarat passage 3 och 6 riktigt. Passage 5 fick felaktigt axelavstånd.
Passage 1, 2 och 4 blev felaktigt registrerade.
TA-89 har registrerat passage 4 och 6 riktigt. Passage 1, 2, 3 och 5 blev felaktigt registrerade.
21
6. Möten MC - personbil
1. Personbil möter BMW 75G. Metor imputerar personbil med släp. TA-89 ger en riktig registrering av en personbil och en MC.
2. Personbil möter Honda 125. Metor imputerar personbil med släp. TA-89 ger personbil och restpassage.
3. Personbil möter BMW 75P. Metor imputerar lastbil med släp. TA-89 ger en korrekt registrering av en personbil och MC.
4. Personbil möter Honda 125. Metor imputerar en lastbil och en personbil. TA-89 ger en restpassage och en MC.
5. Personbil möter BMW 75G. Båda ger en personbil och en MC. Men Metor ger fel axelavstånd.
6. Personbil möter Honda 400. Båda ger en riktig registrering av en personbil och en MC.
7. Personbil möter Yamaha 600. Båda ger en riktig registrering av en person-bil och en MC.
8. Personbil möter Honda 125. Båda ger en riktig registrering av en personbil och en MC.
9. Personbil möter Honda 125. Metor ger endast en personbil. TA-89 ger en personbil och en restpassage.
Kommentar
Metor har registrerat fall 6, 7 och 8 riktigt.
Fall 5 har registrerats riktigt så när som på MC:ns axelavstånd.
Fallen 1, 2, 3 och 4 har blivit felregistrerade och i fall 9 finns ingen registrering alls för MCn.
TA-89 har registrerat fall 1, 3, 5, 6, 7 och 8 riktigt. I fall 4 registrerades MCn men ej personbilen. Fallen 2 och 9 registrerades fel.
Apparaterna har klarat fler riktiga registreringar här än vid mötena MC-MC. Detta beror förmodligen på att mötena har skett i genomsnitt lite längre ifrån slangarna.
7. Personbil kör om MC
Det var lite svårt att åstadkomma denna interaktion. Därför hann vi inte med mer än två passager. Motorcyklarna fick invänta personbilar och sedan köra över mät-platsen.
1. Personbil kommer bakom och skall köra om Yamaha 600. Metor imputerar en personbil och en personbil med släp. TA-89 ger korrekt en MC och en per-sonbil och dessutom en restpassage.
2. Personbil har just kört om BMW 75P. Metor ger endast en personbil. TA-89 ger en riktig registrering av en personbil och en MC.
Kommentar
Metor registrerade endast personbilen i fall 2 riktigt.
Fall 1 registrerades inte riktigt. (Imputationen gav dock rätt fordonstyp).
TA-89 registrerade fall 2 helt rätt. I fall 1 registrerades endast MCn rätt.
23
Utöver körschemat:
8. Möten personbil - personbil som har registrerats som MC
Andra fordonstyper som givit upphov till MC-registreringar har inte specialstu-derats. Hur vanligt det är kan vi inte uttala oss om. Utom körschemat för motor-cyklarna fick vi in några MC -registreringar som orsakades av personbilar.
1. Två Volvo 745 möts. Metor imputerar en MC och en personbil. TA-89 ger en riktig registrering av två personbilar.
2. En Saab 9000 och en mindre kombibil möts. Metor ger två MC med fel has-tighet (ej imputation). TA-89 ger en personbil och en restpassage.
Kommentar
Metor anger här felaktigt motorcyklar. I fall 1 har den imputerat en motorcykel och en personbil.
I fall 2 har Metor felaktigt registrerat två motorcyklar. Märk väl ej som imputa-tion!
TA-89 har registrerat de riktiga fordonen i fall 1, två personbilar.
I fall 2 har TA-89 registrerat den ena personbilen rätt och den andra som en rest-passage.
24
5 DISKUSSION
Från första delen av mättestet på Rv 36 ser vi att det blir felaktiga registreringar för ett par av de lättare motorcyklarna, speciellt när de kör på vägrenen i riktning 1. Detta beror förmodligen på att man kör över slangen i den delen som ligger längst ifrån apparaten och att pulsen blir svag när den kommer fram till pulsom-vandlaren.
De två motorcyklar som orsakat mest bortfall är den lätta MC:n Honda 125, som tillsammans med förare vägde ca 215 kg och Yamaha 600 som vägde ca 270 kg inklusive förare.
Slutsats: Slangar är ej lämpliga för att detektera lätta fordon.
Lite förvånande var att den näst lättaste MCn, Honda 400, som vägde ca 230 kg med förare, gav bättre resultat än den 270 kg tunga Yamahan. En möjlig förkla-ring kan vara att viktfördelningen mellan fram- och bakhjul var jämnare på Hon-dan.
Variansanalysen visar att skillnaden i uppmätt hastighet beror av hastighetsnivå och ekipaget; motorcykeln plus föraren.
Mättestet där motorcyklarna skulle interagera med annan trafik började med att de skulle köra nära efter annat fordon. Av sju olika passager registrerade Metor ingen helt riktig passage och TA-89 två riktiga passager. Det kan dock inte sägas att for-donen hade exakt samma hastighet och avstånd vid varje passage av de båda appa-raternas slangar eftersom de sattes upp med ett avstånd på 0,4 m.
Vid nästa del av testet skulle man försöka få motorcyklarna att möta varandra över slangarna. I detta försök har naturligtvis avståndet mellan slangarna lite större betydelse eftersom tiden mellan fordonspassagerna här blir noll i själva mötesögonblicket. Utfallet av detta mättest blev att båda apparaterna klarade 2 av 6 möten.
Resultatet från dessa och följande deltester av interaktioner blev att bara sju respektive 13 registreringar av 26 blev helt lyckade. Men nu kan man inte bedöma hur apparaterna mäter vanlig motorcykeltrafik genom att räkna på det sättet,
25
som vi har sökt åstadkomma särskilt komplicerade situationer som kanske inte är så vanliga i normal trafik.
I varje del är underlaget för litet för generella slutsatser.
Imputationerna som Metor har gjort vid MC-passagerna har oftare resulterat i per-sonbilar än motorcyklar. Det beror på att imputationen bara går efter antalet axlar. Eftersom motorcyklarna endast utgör en liten del av trafiken kan en "felaktig" imputation få stor betydelse för mätningen av motorcyklar.
Vid ett tillfälle registrerade Metor två mötande personbilar som två mötande MC. TA-89 registrerade två personbilar med en tidsdifferens på ca 0,3 sekunder. Det var inte en imputation utan en felregistrering som, om Metor ska användas för att mäta MC-trafik, borde studeras närmare.
Båda apparaterna har gjort felaktiga registreringar trots att tidsdifferensen mellan fordonen varit många gånger större än blockeringstiden. Tester pågår vid VTI för närvarande att mäta med kortare blockeringstid vilket skulle kunna resultera i något förbättrade prestanda hos TA-89.
För att förbättra registreringen vid möten skulle man kunna använda delad slang och två apparater vid varje mätpunkt.
Den radikalaste lösningen vore att använda en annan och bättre typ av sensorer än slangar. Både Metor och TA-89 kunde modifieras programmässigt för att kunna tolka interaktionen bättre. Metor skulle dessutom kunna förbättras med en känsli-gare pulsomvandlare.
26
6 REFERENSER
1 Nilsson, G.K.. MC-hastigheter på landsväg. Meddelande nr 436. Statens väg- och trafikinstitut (VTT), Linköping 1985.
2 Telub Industri AB. METOR 2000 Systemteknisk handbok.
3 Anund, Per. Beskrivning och manual till PREC9S5, ett program för evaluering av fordon. Notat 147. Statens väg- och transportforsknings-institut (VTT), Linköping 1995.
4 Wilhelmsson, Håkan. VTT. WUniversellt trafikmätningssystem. PM. Statens väg- och transportforskningsinstitut (VTT), Linköping 1994.
Variansanalys med avseende på hastighetsdifferens
24 Jan 95 SPSS for MS WINDOWS Release 6.0 T * * * * * A n a l y s i s
96 cases accepted.
0 cases rejected because of out-of-range factor values. 24 cases rejected because of missing data.
58 non-empty cells. o f
Bilaga 1 Sid 1 (8)
1 design will be processed.
V a ro i a n c e * * * * * *
Page 17
24 Jan 95 SPSS for MS WINDOWS Release 6.0 * * * * * * A n a 1 y s i s
Combined Observed Means for HKL Variable .. HDIF HKL k 2 WGT. UNWGT . WGT . UNWGT . o f , 02250 , 03917 , 24799 , 23671 . 24331 . 23250 , 75958 , 77398 V a r i a n c e -- design Page 18 l...
Combined Observed Means for PIL Variable .. HDIF PIL , 47785 , 39747 . 45663 . 45139 . 50141 , 52666 , 08689 , 08689 , 27338 . 23825
Combined Observed Means for SL Variable .. HDIF SL , 47896 , 47674 , 19089 , 19861 , 17037 . 23044
24 Jan 95 SPSS for MS WINDOWS Release 6 . 0
t * * * + * A n a 1 y s i s o f
Order of Variables for Analysis Variates Covariates HDIF 1 Dependent Variable 0 Covariates V a r i a n c e -- design Page 19 1 * * * * % &
Bilaga 1 Sid 2 (8)
24 Jan 95 SPSS for MS WINDOWS Release 6.0 Page 20 * * * * * * A n a 1 y s i s o f V a ro i a n c e -- design L = F * * * *
Tests of Significance for HDIF using UNIQUE sums of squares
Source of Variation ss DF MS F Sig of F WITHIN+RESIDUAL 33,18 86 , 39 HKL 6 , 20 3 2 , 07 5,36 , 002 PIL 5,27 4 1,32 3, 42 ;, 012 SL 1,15 2 , 58 1, 49 , 231 (Model ) 13,26 9 1, 47 3 , 82 , 000 (Total) 46 , 44 95 , 49 R-Squared = , 286 Adjusted R-Squared = ,211
Estimates for HDIF
--- Individual univariate ,9500 confidence intervals HKL
Parameter Coeff. Std. Err. t-Value Sig. t Lower -95% CL- Upper y SV-1V 2 -, 72190554 , 18663 -3,86807 ,00021 -1,09292 -, 35089 2v-1V 3 -, 52305732 , 18197 -2 , 87447 , 00510 - , 88479 -, 16132 -v=)) 0 4 -, 51901531 , 18601 -2 ,79021 , 00649 -, 88880 -, 14923
PIL
Parameter Coeff. Std. Err. t-Value Sig. t Lower -95% CL- Upper 1-5 5 , 201504065 , 21750 ; 92645 , 35681 - , 23087 , 63388 1 -S 6 , 179722235 , 20774 , 86512 , 38938 -, 23326 , 59270 3-7 7 , 204358249 , 21397 , 95506 , 34222 - , 22101 , 62972
q-f' 8 -, 36774782 , 20242 -1 , 81673 , 07274 =, 77015 , 03466
SL
Parameter Coeff. Std. Err. t-Value Sig. t Lower -95% CL- Upper
1-3 9 , 225751341 , 15935 1, 41672 , 16018 - , 09102 , 54252
2-3 10 -, 00097843 , 16592 -, 00590 , 99531 -, 33081 , 32885
Adjusted and Estimated Means Variable .. HDIF
CELL Obs. Mean Adj. Mean Est. Mean Raw Resid. Std. Resid.
1 , 265 352 , 3$2 - , 087 - , 140
Bilaga 1 Sid 3 (8)
24 Jan 95 SPSS for MS WINDOWS Release 6.0 Page 21 * * * * * * A n a 1 y s i s o f V a r i a n c e -- design i * # * # * *
Adjusted and Estimated Means (Cont.) Variable .. HDIF
CELL Obs. Mean Adj. Mean Est. Mean Raw Resid. Std. Resid. 2 -, 252 , 126 , 126 -=, 377 - , 607 3 -, 177 , 127 , 127 -, 303 -, 488 4 , 390 , 330 , 330 , 060 , 096 _5 22 "+ 145 _ , 104 , 104 -, 248 - , 400 6- , 180 105 , 105 , 075 , 121 7 , 341 , 355 ; 358 - , 014 -, 022 8 -, 054 , 128 , 128 -, 182 - , 294 9 , 541 , 129 : 129 , 412 , 663 10 -, 028 -, 217 -, 217 , 189 , 304 11 -, 532 - , 444 - , 444 -, 089 -, 143 12 -, 236 -, 443 -, 443 , 207 , 333 13 |061 0151 0151 "090 ** % 145 14 , 046 -, 076 -, 076 , 122 , 197 15 , 186 -, 075 -=, 075 , 261 , 420 16 1004 0551 0551 ** - 547 ** v 880 17 1, 044 . 324 . 324 , 719 1, 158 18 1,132 + 325 , 325 , 807 1,299 19 0198 1529 1529 1331 -1533 20 , 460 - 303 , 303 , 157 253 21 0127 0304 0304 ** 9 177 '.285 22 . 285 , 554 , 554 -, 269 -, 433 23 -, 218 , 327 327 -, 546 - , 878 24 , 533 , 328 . 328 , 205 , 330 25 , 645 -, 018 - , 018 , 663 1, 068 26 -, 500 -, 245 -, 245 -=, 255 - , 411 27 -=, 075 - , 244 - , 244 , 169 , 272 28 , 044 , 350 , 350 =, 306 -, 493 29 , 042 , 123 , 123 -, 081 -, 131 30 -, 170 , 124 , 124 -, 293 -, 472 31 , 927 , $$$ , £55 , 372 , 598 32 , 156 328 . 328 -, 172 -=, 277 33 155 , 329 , 329 -, 174 -, 281 34 - , 034 , 533 , 533 -=, 567 -, 913 35 , 808 , 307 , 307 , 502 , 807 36 -=, 534 , 308 , 308 - , 842 -1 , 355 37 , 606 , 558 , 558 , 048 , 077 38 , 933 , 331 + 331 , 602 , 970 39 1, 134 ; 332 , 332 , 802 1, 290 40 - , 004 - , 014 - , 014 , 010 , 017 41 -, 990 -, 241 -, 241 -, 149 -1 , 206 42 -, 563 - , 240 -, 240 -, 323 -, 520 43 , 668 , 354 , 354 , 314 , 506
24 Jan 95 SPSS for MS WINDOWS Release 6.0 Page 22
t * * + * * A n a l y s i s 0 £ V a r i a n c e -- design 1 * * * * * * Adjusted and Estimated Means (Cont.)
Variable .. HDIF
CELL Obs. Mean Adj. Mean Est. Mean Raw Resid. Std. Resid. 4 4 , 126 , 127 , 127 -, 001 -, 001 45 , 098 , 128 , 128 -, 030 - , 048 4 6 , 379 1, 074 1, 074 -, 695 -1 , 119 47 , 738 , 848 , 848 -, 111 -, 178 4 8 1, 534 1, 052 1, 052 , 481 , 7975 49 1 , 044 , 826 , 826 , 218 , 351 50 1, 388 , 827 , 827 , 562 , 904 51 , 758 1, 077 1, 077 -, 319 -, 514 52 1, 026 , 850 , 850 , 176 . 283 53 , 434 , 851 , 851 -, 417 -, 671 54 1, 560 , 505 , 505 1,055 1, 699 55 , 194 , 278 , 278 - , 084 -=, 135 56 - , 514 , 279 , 279 -, 793 -1 , 277 57 , 935 , 873 , 873 , 062 , 100 58 , 585 , 646 , 646 - , 061 - , 098
Bilaga 1 Sid 4 (8)
24 Jan 95 SPSS for MS WINDOWS Release 6.0 Page 23 to * * * * * A n a l y s i s o f V a r i a n c e -- design 1 * * * * % %
Combined Adjusted Means for HKL Variable .. HDIF HKL 9 1 UNWGT . , 04351 30 2 UNWGT . , 24236 & 9 3 UNWGT . ., 24640 v i$ 4 UNWGT . , 76822
Combined Adjusted Means for PIL Variable .. HDIF PIL 1 UNWGT . , 44917 2 UNWGT . , 46058 3 UNWGT . , 48522 4 UNWGT . -, 08689 5 UNWGT . , 24758
Combined Adjusted Means for SL Variable .. HDIF SL 1 UNWGT . , 47525 & 2 UNWGT . , 21700 tm T* QQX prå& rQ_, 5 A VTT meddelande 759
2 2 2 2 2 2 2 2 2 Bilaga 1 Sid 5 (8) c: lmetorlhast40.sav interakt ip21 möt
Bilaga 1 Sid 6 (8)
c: metorlhast40.sav
pil hkl s di tid meha tanha meax taax interakt haiff stid
34 2 1 2 1 33624 47 46.8 145 144,4 .01 2184 35 2] 2] 2] 2] 33708 66 66, 1 144 145,5 ,58 2228 36 21 2] 2 1 33749 63 63.5 143 144,9 .33 2269 37 2/1 3| 2/ 2| 33857 85 85,4 144 145,7 ,.60 2337 38 2/ 3] 2 1 34015 86 86.0 143 144,7 1.02 2415 39| 2] 4| 2 2 34214 106 106,5 144 145,9 .89 2534 40 2] 2 1 34303 108 107,7 144 145,2 1,20 2583 41 2| 1 3 2| 34356 45 45.6 144 145,5 -,13 2636 42 21 1 3 1 34417 46 45,7 144 144,6 49 2657 43 2| 2| 3 2| 34454 62 62.1 145 146,9 71 2694 44 2 2 3 1] 34524 68 67.8 146 144,6 -,45 2724 45 21 3| 3| 2 34614 85 86.6 144 145.8 2774 46 2 3 3 1 34650 . 82.6 s 144,5 iib möpb . 2810 47 2 4| 3 2 34735 105 105,8 143 146,0 1,39 2855 48 4] 3 1 34834 x 108,5 s 145,0 ipb vrri . 2914 491 3] 1 1 2 32127 48 48,7 136 137,9 -.03 1287 50 3 1 1 1 32233 47 46,7 136 137,2 71 1353 51 3| 2 1 2 32327 66 66.2 136 137,6 ,57 1407 52| 3 2 1 1 32439 69 68.6 137 136,2 .00 1479 53 3| 3 1 2 32540 91 92,0 135 137,8 .88 1540 54 3| 3 1 1 32618 85 86.6 136 139,1 .33 1578 55 3 4 1 2 32658 110 110,4 135 137,5 1,62 1618 56 3 4 1 1 32755 107 107,5 136 136,5 -,11 1675 &7/ 3| 1 2 2 32835 40 40.2 137 137,5 -,05 1715 58 3 1 2 1] 32856 » 42,9 s 136.5 ipb lir! . 1736 59! 3| 2 2 33010 66 66.3 138 137,7 -,44 1810 60 3| 2| 2] 1| 33046 68 69,0 135 137,0 .01 1846 61 3| 3| 2/ 2| 33127 88 88.9 134 137,7 1.51 1887 62 31 3| 2] 1| 33219 87 87,8 135 136,8 .36 1939 63 3| 41 2 21] 33331 111 110,7 137 137,9 1.03 2011 64 3 4 2 1 33442 A 109,0 a 135,9 ipb lir! . 2082 65 3 1 3 2 33557 49 48,6 138 138,4 ,54 2157 66 3 1 3 1 33629 » 53.2 e 137,0 ips vrrl . 2189 2-1 VTT meddelande 759
Bilaga 1 Sid 7 (8) c: interakt 2 2 2 2 2 2 3 3 3 3 3 3 3 3
Bilaga 1 Sid 8 (8)
c: Lmetorlhast40.sav
pil hid s 4) tid meha tana meax taax interakt haiff stid
100 5 2 1 2 33300 60 60,0 133 134,0 ,45 1980 101 5 3 ] 1 33433 85 86.2 133 135.5 ,39 2073 102 5 3 1 2 33556 84 84,0 133 134,5 ,.94 2156 103 5S| 41 1] 1] 33718 97 97,91 133] 134,3 ,.05 2238 104 5 4 1 2 33840 94 95.0 132 136,0 1.82 2320 105 5 1 2 1 33930 56 56,1 133 133,6 ,.15 2370 106 5| 1] 2| 2| 34104 47 47,2 134 134,4 -,06 2464 107 2] 2 1 ,. M M + . ipd rest 108 5 2 2 2 34238 66 66,5 134 135,1 ,.04 2558 109 S5| 3 2 1 34404 45 84,6 & 133,2 ime lir] 2644 110] S 3 2 2 34500 84 84,5 134 135.0 .13 2700 111 5 4 2 1 34611 e 102,0 P 133,7 ipb 2771 112 5 4 2 2 34724 93 93.6 133 134,7 ,59 2844 1131 5| 1] 3] 1] 34835 51,2 .] 133,1 mis vt] 2915 114 5 1 3 2 34936 48 48.1 134 134,8 .19 2976 115 5 2 3 1 35024 e 65.3 e 1329 ipb vrrl 3024 116 5 2 3 2 35138 64 64,6 134 134,9 -,17 3098 117] 5| 3| 3| 1] 35244 82.9 133,0 ipb 3164 118 5 3 3 2 35429 83 83.9 133 134,6 10 3269 119 5 4 3 1 35556 100,9 133,5 ipb vrrl . 3356 120 5| 4] 3 2 35712 92,2 135,4 ipb möte 3432 VTT meddelande 759
Tabeller över passager med interaktioner
4. Fordon NÄRA efter varandra
Bilaga 2 Sid 1 (4)
Förarna uppmanades att köra över slangarna nästan samtidigt eller nära annan MC eller bil.
METOR Tid tidsskillnad 13.36.29.689 1 13.58.55.788 2 13.59.31.761 3 4 14.02.02.841 5 14.03.26.517 6 14.05.57.454 14.22.42.888 693ms 7 .581 103ms 14.22.43.684 Riktn Hast (2 65 1 62 2 66 1 77 (2 67 (1 81 I 77 2 108 1 53 Ax.avst Ford-typ PbS1)* släpet ovan kod 1,43/1,80 XXX 1,39 kod 2,41 XXX 1,44 1,42 1,16/1,43 XXX) 1,12/1,44 XXX) 1,37 2,61 TA-89 Tid tidsskillnad 13.36.27.939 68Sms 13.36.28.624 13.58.54.027 13.59.30.044 208ms 13.59.30.252 14.02.01.084 14.03.24.798 14.05.55.695 14.22.41.121 72S5ms 14.22.41.846 141ms 14.22.41.987 42.143 .211 Riktn Hast 1 53,2 1 603,3 1 62,8 2 66,4 2 67,9 1 76,5 (2 67,0 (1 81,2 ] 76,5 2 107,7 ( restpassage ')* Ax.avst Anm Ford-typ 1,370 Yamaha 2,614 Pb kod 1,461/1,798 93 BMWS Honda 1,406 Honda 1,454 BMWS 1,4 12 BMWP+ Yamaha parallellt 2,630 Pb) -"-2,564 Pb) -"-1,37 1 Yamaha 2,612 möt. Pb + BMWP
X 5 Möten MC -MC. METOR Tid tidsskillnad 14.11.36.491 Oms 1 14.1 14.14.40.312 2 Oms 14.14.40.312 14.14.54.115 3 74ms 14.14.54.189 14.15.31.890 4 14.15.58.428 5 28ms 14.15.58.456 14.17.34.149 6 23ms 14.17.34.126 ! Riktn Hast (2 98 (2 99 (2 98 (2 99 1 47 2 51 (1 96 1 77 2 39 1 4 ] 2 59 Ax.avst Ford-typ Pb)* Pb)* Pb)* Pb)* 1,41 1,44 Pb)* (1,50)* (1,30)* 1,44 1,36 Bilaga 2 Sid 2 (4) TA-89 Tid tidsskillnad 14.1 1.34.823 184ms 007 14.11.35.401 14.14.38.513 13ms .526 14.14.38.858 899 .994 .339 14.14.52.446 702 27ms 14.14.52.473 14.15.30.118 250Oms 14.15.30.368 .6063 14.15.56.733 823 14ms 14.15.56.747 14.17.32.369 J35Sms 14.17.32.404
*) Felaktig registrering, imputation eller restpassage
VTT meddelande 759 Riktn Hast t Ax.avst. Ford-typ 39,4 PbS1)* restpassage"* 74.0 Pb)* restpassage" restpassage"* 51,4 1,454 52,2 1,377 41,7 1,463 restpassage" 40,3 1,384 41,3 1,443 59,9 1,380 Anm BMWP 2kb Yamaha 1kb Yamaha 2kb BMWP 1kb Honda400 vr BMWS 21i Yamaha 1kb BMWP 2kb BMWS 1kb Yamaha 2kb BMWP 1kb Yamaha 2kb
X 6. Möten MC - personbil. METOR Tid tidsskillnad 13.28.51.196 1 13.41.55.319 2 13.46.50.428 3 13.57.12.816 4 Oms 13.57.12.816 14.20.00.223 5 63ms 14.20.00.286 14.23.30.993 6 413ms 14.23.3 1.406 14.24.28.800 7 307ms 14.24.29.107 14.24.37.948 8 392ms 14.24.38.340 14.25.47.016 9 Riktn Hast (1 79 (2 65 (2 76 (1 67 (2 89 2 92 1 74 2 67 1 94 1 102 2 100 2 54 1 89 2 87 (saknas helt)* Ax.avst Ford-typ - PbS1)* - PbS1)* - LbS])* - Lb)* - Pb)* 2,40 Pb 1,37* MC 1,40 MC 2,60 Pb 2,65 Pb 1,36 MC 1,33 MC 2,34 Pb 2,79 Pb Bilaga 2 Sid 3 (4) TA-89 Tid tidsskillnad 13.28.48.726 719ms 13.28.49.445 13.41.53.337 411ms 13.41.53.748 .820 13.46.48.259 357ms 13.46.48.616 .903 13.57.10.993 29ms 11.013 13.57.11.042 14.19.58.492 28ms 14.19.58.520 14.23.29.265 379ms 14.23.29.644 14.24.27.038 334ms 14.24.27.372 14.24.36.226 3S50Oms 14.24.36.576 14.25.45.284 476ms _.760 14.25.45.953 46.438
*) Felaktig registrering, imputation eller restpassage.
Riktn Hast Ax.avst Anm Ford-typ 69,0 2,836 Pb Chrys Voyag 42,9 1,436 MC BMWS -93,2 2,694 Pb Sa9000 restpassage -)* 83,9 2,564 82,6 1,445 restpassage -)* 92,2 1,354 92,6 2,410 73,6 1,425 67,0 1,415 93,8 2,612 102,1 2,642 100,4 1,375 53,9 1,341 88,9 2,340 87,4 2,785 restpassage -)* MC Hondal25 Pb Nissan MC BMWP Pb Sa9000 MC Hondal25 Pb FoEscort MC BMWS MC Honda400 Pb Toybus Pb Vo245 MC Yamaha MC Hondal25 Pb LitenJapan Pb Vo 740 MC Honda l25
X 7. Personbil kör om MC. 14.19.16.037 (1 96 Pb)* 1 Oms 14.19.16.037 (1 78 PbS1)* 14.25.38.236 1 89 2,66 2 ( ingen registrering )*
X 8. Möten personbil - personbil
METOR
Tid Riktn Hast Ax.avst tidsskillnad Ford-typ 13.29.01.644 (2 45 MC)* 1 Oms 13.29.01.644 (1 98 Pb)* 13.42.00.300 (1 66 1,63)*ej imp.' Oms 2 13.42.00.300 (2 63 1,61)*ej imp.! Bilaga 2 Sid 4 (4) 14.19.14.352 S68ms 14.19.14.920 .924 14.25.36.47 1 578ms 14.25.37.049 TA-89 Tid tidsskillnad 13.28.59.91 1 172ms 13.29.00.083 13.41.58.559 298ms .857 13.41.58.881 972
*) Felaktig registrering, imputation eller restpassage.
VTT meddelande 759 2 27,0 ( restpassage 2 89,1 1 88,6 1 30,3 Riktn Hast 1 91,1 2 111,5 1 110,2 ( restpassage 1,422 Yamaha ) 2,540 Nissan 2,660 Vo245 1,444 BMWP vägren Ax.avst Anm Ford-typ 2,794 Vo745 2,798 Vo745 2,691 Sa9000 ')* Röd kombi