Reconfigurable Machine Tools Design Methodologies
and
Measuring Reconfigurability for Design Evaluation
MASTER THESIS
By:Nasser Aboufazeli
Thesis supervisor:
Prof. Daniel T. Semere
School of Industrial Engineering and Management
Production Engineering and Management Department
Sweden 2011
i
Abbreviations
Application program interface
Computer numerically controlled
Dedicated Manufacturing Line Design Parameter
Engineering Research Center Functional Requirement
Flexible Manufacturing System
Flow of Force Homogeneous Transformation Matrix Reconfiguration Difficulty Index Reconfiguration Index
Reconfigurable Manufacturing System Reconfigurable Machine Tool
API CNC DML DP ERC FR FMS FOF HTM RDI RI RMS RMT
iii
Contents
Introduction ... 1
Chapter 1 ... 5
Types of Manufacturing System ... 5
1.1. DML (Dedicated Manufacturing Line) ... 5
1.2. FMS (Flexible Manufacturing System) ... 6
1.3. Modularity and Reconfigurability ... 7
1.4. RMS (Reconfigurable Manufacturing System) ... 8
Chapter 2 ... 11
Reconfigurable Machine Tools (RMT) Design ... 11
2.1. Types of Machine Tools ... 11
2.2. Reconfigurable Machine Tool Design ... 15
Chapter 3 ... 31 Enabler of generation of RMTs ... 31 3.1. Open-architecture controllers ... 31 3.2. Interfaces ... 32 3.3. Integrated Software ... 33 Chapter 4 ... 41
Measuring Reconfigurability for Design Evaluation ... 41
4.1. Evaluation of Ease of Reconfiguration ... 41
4.2. Machine Tool Reconfigurability Rate ... 46
Summary ... 49
Future Works ... 51
v
Acknowledgements
The author wishes to express his gratitude to his supervisor, Prof. Daniel T. Semere who was very helpful and offered invaluable assistance, support and guidance. Special thanks to my nice Chinese friend Yujiang Li who helped me for NX software patiently. Also I appreciate Mr. Per Johansson for providing required softwares and supporting me generously when I needed some technical helps.
1
Introduction
In today’s competitive market because of the short life cycle of the products and change in customer demand of quantity and type of the product a rapid respond is an important key to compete with opponents. One of the solutions is evolvable manufacturing system and reconfigurable machine tools as the heart of this kind of manufacturing system. To implement such an idea we need standard methodologies and some enablers to reconfigure machine tools rapidly. As I will explain in the next chapters this concept is suitable when producing high variety of the products with high throughput otherwise it is not cost-effective.
Other than competitive global market the other drivers like more educated customers and rapid pace of the process technology and change in government regulations that cause some changes like:
in parts of the existing product
need to make new variant of the products product demand fluctuation
process technology
So, we need a rapid and cost-effective method to deal with these changes. In spite of the old method that was used to replace the old machines or add some new machines the new solution is reconfiguration of the manufacturing system including machine tool.
National Research Council in USA has investigated about manufacturing challenges for 2020[2]. This research shows the vision of the next two decades about some changes happens in the manufacturing like changing in workforce, consumer, the rise of bio and nanotechnology, prospects for waste-free processing, simulation and modeling and global competitive market.
The six manufacturing grand challenges that show the gap between current practices and the vision of manufacturing in 2020 are:
Getting concurrency in all operations.
Integrating human and technical resources to improve workforce performance and satisfaction.
“Instantaneous” transform information gathering from broad different sources to useful knowledge for effective decision making.
2
Reconfigurable manufacturing for rapid responsiveness to the changes
and opportunities.
Developing innovative product and process for decreasing dimensional scale.
As we can see, one of the challenges of manufacturing is rapid response to demand changes that should be cost-effective. The solution that has been proposed is RMS and consequently RMT. So, the research about reconfigurable systems has started from around 10 years ago and it will be one of the important issues in manufacturing in the next decade.
To Understand RMS systems and RMT machine tools we need to know about different types of existing manufacturing systems and then explain about RMS and RMT and their advantages and methodologies to implement and problems that exist and must be solved in the future.
There are three different manufacturing systems: DML (Dedicated Manufacturing Line), FMS (Flexible Manufacturing System) and RMS (Reconfigurable Manufacturing System).DML systems are designed for single products with different operation simultaneously that means high productivity while FMS is for different types of products (variants) with high flexibility. RMS system is a new type of manufacturing system that has both needed productivity and flexibility by changing the software and hardware of the production line.
Figure 1.1: Reconfigurable tools fill the gap between dedicated tools and flexible tools.[3]
Reconfiguration is based on modular hardware and software and is defined for part family and quick change in capacity and functionality according to the change in demand in competitive market.
3
Reconfigurability is something more than modularity.Actually it means modularity plus scalability, integrability, convertibility, customization and diagnosability. I tried to show the methodologies and enablers like software and standard interfaces are necessary to have reconfigurable machine tools but there is still the lack of integrated software that gets the requirements as inputs and gives us the acceptable configurations as output and there is not a interface standard to use different modules from different suppliers to assemble them together to make desired structure of machine tool.
5
Chapter 1
Types of Manufacturing System
On the basis of flexibility of the manufacturing systems and variety types of
products and production volume of company we can define three kinds of
manufacturing systems: Dedicated, flexible and reconfigurable.
1.1. DML (Dedicated Manufacturing Line)
DML is a kind of rigid production line and a single part is produced by operation
of several tools at the same time. So, the production rate is very high and these kinds of manufacturing system are designed to make few variants of parts at high volume and are highly productive.
Figure 1.2: Dedicated Production line of wagons of train
As DML has low flexibility but high productivity, therefore it is cost effective when it operates at full capacity that means demand should be more than supply. When the number of the variants is high then it is not proper system.[1]
6
1.2. FMS (Flexible Manufacturing System)
FMS can produce different variants of products with changeable volume and mix.
Figure 1.3: Flexible manufacturing line with high number of mixed variants. CNC machines are used in these kinds of manufacturing systems and their programmable controllers for automation are very expensive. In spite of DML system FMS has low throughput because CNC machine use single tool to make a product. So, because of expensive machines and low throughput of FMS systems the cost per product is high. If we want to compare these two different manufacturing systems it is like below:[1]
Table 1.1: Comparison between DML and FMS.[1]
Before explaining about the third type of manufacturing system we should know about two technical terminologies: Modularity and reconfigurability and consequently modular and reconfigurable machine tool or system. Generally reconfigurability has broader meaning. It means that it has the modularity concepts plus some extra characteristics.
Manufacturing System DML FMS
Limitations -low Flexibility
-Fixed Capacity -Being Expensive -Low Throughput
Advantages -Low Cost
-Multi Tool Operation
-Flexible -Scalable
7
On the other word a reconfigurable machine tool or system is made according to the modular design rules but it includes some essential concepts to call it reconfigurable.
1.3. Modularity and Reconfigurability
Modularity is the is compartmentalization whole of the system or machine into subsystem or parts and making the system or machine tool by combination of some separable subsystems or parts to change the structure in order to make different functionality.
Reconfigurability is a concept more than modularity. It means for instance
reconfigurable machine tool is a modular machine tool that has some other characteristics to make a rapid cost-effective change in the structure of the machine to get different functionality. These characteristics are: [4]
Scalability is the ability to change the production capacity reconfiguring the
structure of the machine tool like changing the spindle, worktable and so on. This characteristic of the machine tool is for increasing the productivity of the machine tool when there is unpredictable change in the quantity of demand.
Integrability is to integrate parts (modules) rapidly and accurately. This is possible
by sets of mechanical, informational and control interfaces to fit the modules together properly. The speed of the replacement of the modules is very important because if set-up time or ramp-up time becomes long the productivity will be low and the reconfigurable machine tool will not be cost-effective.
Convertibility is ability of the machine tool to change the functionality by
changing the structure of the machine tool. For instance to do turning and milling with one machine tool only by changing of the spindle and worktable. It helps us to produce the new variants of products with the existence machine tool and we do not need to add a new machine to the production system.
Customization is a kind of limited and needed flexibility for the specific defined
family part. Family part includes the parts that have similar specification like geometry, shape and so on that we need the least change in machine tool to produce these parts in the family just by a rapid set-up time.
To produce another part family group we need a longer time to change the machine tool called ramp-up time.
8
As a matter of fact, customization is for creating only needed flexibility (not general flexibility like CNC machines) based on part family definition to reduce the cost of production.
Diagnosability is the ability to read the current situation and find the root cause of
defects automatically and rapidly correct the error. This characteristic is very important because RMT is a kind of multifunctional machine tool that if it breaks down the whole of the manufacturing will face big problem and the production line will stop.
The above principles of RMT make the production cost-effective and rapid. It means that RMT is a kind of machine with needed flexibility and acceptable productivity.
1.4. RMS (Reconfigurable Manufacturing System)
The three principals of every manufacturing company are low cost, rapid responsiveness and high quality. To get low cost of product manufacturing mass production was introduced in 1920s. For higher quality eliminating of the wastes by lean manufacturing methods is used. The cost-effective responsiveness is possible by reconfigurable manufacturing being means of modular concepts and other characteristics like scalability, diagnosability and so on explained before. As you see in two above manufacturing system DML has high productivity but low flexibility and FMS the opposite characteristics it means low productivity and high flexibility (designed to produce different variants of products). But RMS compromises between these two manufacturing systems and it has needed flexible in family part (customized flexibility) and it has needed productivity based on demand. [4]
RMS is cost effective manufacturing system because of:
Adjustable resources it means scalability for change in market demand and convertibility for new variants in the part family. So, we do not need, for instance, to replace the old machine with new ones.
Customized flexibility in part family to get needed flexibility (not general flexibility like CNCS in FMS) acceptable productivity. It means that RMS has the ability of being flexible for new product whenever the manufacturing of the new product is needed but it is not applied to the system before having the new product order like what happens in FMS.
9
In fact, RMS is designed for “exactly needed functionality and capacity” and” exactly “when needed”. So, the manufacturing system is ready to change according to product change. It means in spite of DML (low flexibility and high capacity) and FMS (high flexibility and low capacity) is dynamic manufacturing system and has rapid responsiveness.
So, the definition of the reconfigurable manufacturing system as Professor Yoram Koren (Director, NSF Engineering Research Center (ERC) for Reconfigurable Manufacturing Systems) defined:[1]
“A reconfigurable manufacturing system (RMS) is designed at the outset for rapid change in structure, as well as in hardware and software components, in order to quickly adjust production capacity and functionality within a part family in response to sudden changes in market or regulatory requirements”.
11
Chapter 2
Reconfigurable Machine Tools (RMT) Design
2.1. Types of Machine Tools
The principles of machine tools are exactly like manufacturing systems. Machine tools can be dedicated, flexible and reconfigurable. The dedicated machine tool has many tools to work on a single part. This type of machine tool will be suitable for the low variant of products with high volume and consequently we can get the low cost per product. The flexible machine tool can be a CNC machine that has flexible functionality for producing the high number of variants with low volume. CNCs are designed before specifying the exact process of machining and it has very flexible functionality even more than needed to cover the machining process that unexpectedly happens and because of its high flexibility it is expensive and it has low throughput also. Reconfigurable machine tool fills the gap between these two types of machine tools.
It means that this type of machine can be used for high number of variants with high volume production rate and makes the cost-effective production with rapid responsiveness possible. The main reason of cost-effectiveness of RMTs in spite of CNCs is “we exactly use what needed when it is needed not more and not
less”. Also, it is adjustable to the new structure for producing of the new products
based on the customer demand of the competitive market that is impossible for dedicated machine tool and expensive for CNCs.
Dedicated Machine Tools
Reconfigurable Machine Tools
Flexible Machine Tools
Flexibility Production
Volume
Figure 2.1: Flexibility vs. production volume of different classes of machine tools
12
According to the above figure (Figure 1.5), practically dedicated machine tools are used when we produce single part in high volume. Structure of this type of machine is fixed but its throughput is high and is economical choice especially when it works with full capacity. The capacity of this type of machine is not changeable on the basis of the demand (i.e. it is not scalable).
When we need to produce low volume of the different types of product flexible machine tools (CNCs) are the best choice. The structure of these machines is fixed because they are made by machine builders before coming to the shop floor and they try to apply every type of flexibility they imagine for the future that sometimes they are useless so CNCs have high flexibility and cost.
Reconfigurable machine tools can be practically used for high volume of products with different types and they have adjustable structures and scalable for different costumer demand. Their cost is something between dedicated and flexible one but there are some points we should consider:
When we have single product with high volume then dedicated machine tool is a better choice than RMT. So, if we use an RMT with library of modules is not justified economically and technically.
When the number of the variants is very high, if we want to use RMT then maybe we need high number of the modules in the library and it cost more than a high flexible CNC but there is a new concept called “mass customization” that researchers are trying to find a way to use RMTs for producing the high volume of different products that CNCs are not designed for.
Reconfigurable Machine Tools
Dedicated
Machine Tools Flexible
Machine Tools
Cost Production
Volume
13
The below table shows the differences among different three classes of the machine tools: Dedicated machine tools Reconfigurable machine tools Flexible machine tools( CNCs)
Machine Structure Fixed Adjustable Fixed
Scalability No Yes Yes
Flexibility No Customized High( General)
Cost Low Medium High
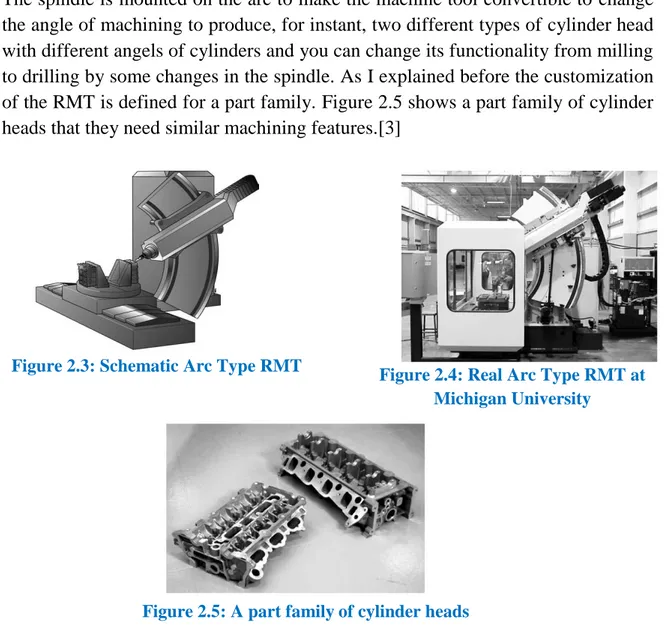
The below figures are two examples of reconfigurable machine tools. Figure 2.3 shows the schematic structure of the arc type RMT that is made by a research group in Michigan University and Figure 2.4 is the picture of the real one at its lab. The spindle is mounted on the arc to make the machine tool convertible to change the angle of machining to produce, for instant, two different types of cylinder head with different angels of cylinders and you can change its functionality from milling to drilling by some changes in the spindle. As I explained before the customization of the RMT is defined for a part family. Figure 2.5 shows a part family of cylinder heads that they need similar machining features.[3]
Figure 2.3: Schematic Arc Type RMT
Figure 2.4: Real Arc Type RMT at Michigan University
Figure 2.5: A part familyof cylinder heads
Figure 2.1: differences among different three classes of the machine[1] tools
14
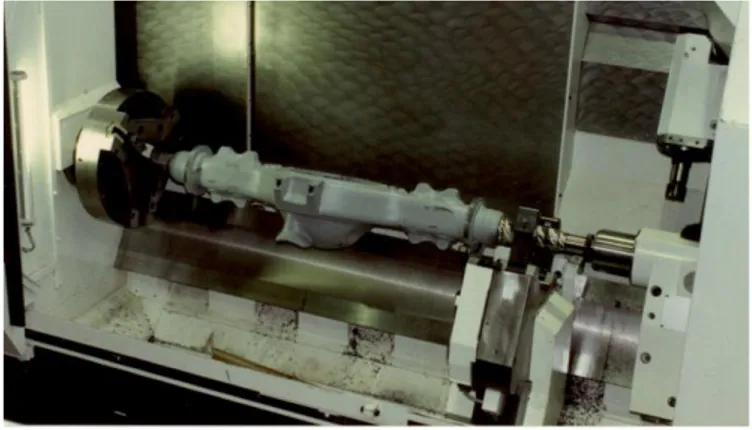
The other real example of RMT that is used as multi functional machine tool i.e. milling and turning is shown in Figure 2.5.[5]. It can be done by changing the spindle functionality of the milling machine that is shown on the left side of the picture.
15
2.2. Reconfigurable Machine Tool Design
As explained before, RMT is a kind of modular machine tool with some essential characteristics like: convertibility, customization, integrability and diagnosability. These characteristics make RMT cost-effective, rapid and allow mass customization. There are two ways to reconfigure machine tools: replacing machine tools and integrated reconfiguration function (see Figure 2.1 and Figure
2.2).[6]
Figure 2.1: Reconfigurable Machine by Replacing Machine Modules.
Figure 2.2: Reconfigurable Machine Using Integrated Reconfiguration Functions.
To design RMT we need a standard methodology to reconfigure RMT fast when we get required functionality from process planner before making the product.
Configuration1 Configuration2
16 There are three phases to design an RMT:
Definition of the requirement that is done by process planner according to change in production volume or product design. These requirements can be kinematics, power or timing of the motion.
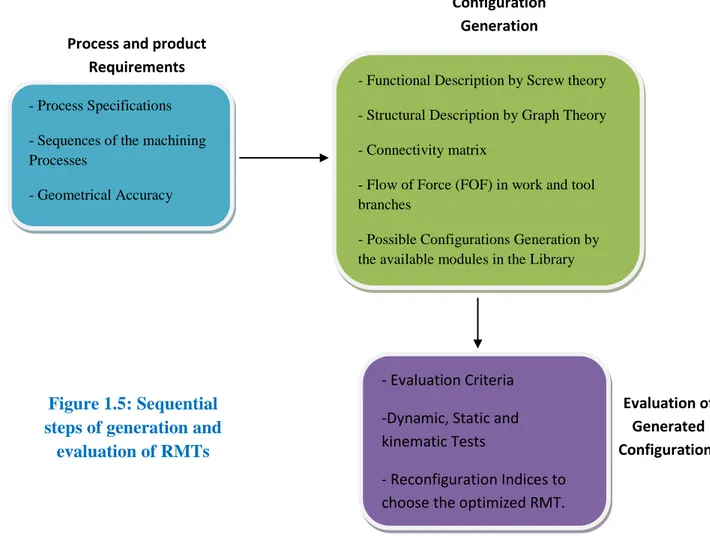
Configuration generation can be done by functional description of the machine tool with screw theory and structural description with graph theory. Evaluation of the generated configurations by static, dynamic and
kinematic analysis to eliminate infeasible configurations. Figure1.5 shows the steps of generation and evaluation of RMTs.
To do the required machining process we need making the configuration of the machine tool that is capable of doing machining process. In this regard, we need to describe the machine tool. There are two different types of description: functional and structural.
- Process Specifications - Sequences of the machining Processes
- Geometrical Accuracy
Evaluation of Generated Configurations
- Functional Description by Screw theory - Structural Description by Graph Theory - Connectivity matrix
- Flow of Force (FOF) in work and tool branches
- Possible Configurations Generation by the available modules in the Library
Configuration Generation
- Evaluation Criteria -Dynamic, Static and kinematic Tests
- Reconfiguration Indices to choose the optimized RMT.
Process and product Requirements
Figure 1.5: Sequential steps of generation and
17
One of the description methods of functionality (kinematic characteristics of the machine tool) for translational and rotational movements is done by screw theory.
Table 2.1: Description Methods and the their areas of the application
The structural description used in my thesis is based on graph theory by means of directed graphs from library of the modules. Functional description is in higher level and more complicated than structural one. Choosing of the one the above methods to describe the machine tool depends on what feature is emphasized in the description and the area of the application (see Table 2.1).[7]
Description
Method Description Procedure Simplicity Application Area
Functional
- Implicit representation of flow of force
- Representation using linear and rotational
movements in direction and around X, Y and Z axes
The very ease of description : Only elementary knowledge about machine tools and manufacturing procedures is required - Functional analysis of machine tool - Decision of qualitative similarities
- Prediction of variants from basic structure
- Computer-Aided drafting for concept drawing
- Atomized process planning - Structure analysis from ergonomics aspect
Structural
- Explicit representation of flow of force
- Representation using GT codes and flow of
force(structural pattern) Certain Difficulties in description : Deep knowledge about machine tool structure is required - Classification of machine tools - Structural analysis of machine tools - Evaluation of structural similarities - Generation of structural configuration (variants and free types)
18
2.2.1. Functional Description of the RMT (Kinematic Modeling)
Motion description is used to describe the traveling and rotational movements in both work and tool branches. The movements have two types: primary motion and auxiliary motion.
Primary motions include major cutting and feeding movements it means the
major movements for removing metal from the work piece in machining process. This type of movements can be rotational, translational or both.
Auxiliary motion is used to prepare the main cutting process of the machining.
These types of motions can be for: clamping the work piece changing speeds and feeds
set up the motion for different work piece sizes
To describe the machine tool motions we can use different methods but two of the comprehensive and to some extent easy ways are screw theory and Homogeneous Transformation Matrix (HTM).
Screw Theory and HTM Method:
Screw theory uses three dimensional motion of the rigid body by screw to show
the rotational and translational movements about an axis. The definition of the pitch of movement is translation motion divided by rotation.[8]
Translational Motion Pitch
Rotaional Motion
The disadvantage of screw shows itself when we have pure translation and no rotation because the pitch becomes indefinite.
Homogeneous Transformation Matrix (HTM) shows the displacement between
the current position and the previous one but can not show the show the nature of the motion
we define the translational and rotational motion task of machine tool according to the operation plan including machining operation type, cutter location and the process plan for the new product volume or new types of the products then by defining the HTM matrices from cutter location and calculating displacement we get the dual vector of the motion and we merge the motion in the same direction. Finally, we have the final required motions we need to do with machine tool.
19
2.2.2. Structural Description of the RMT
Structural description of the RMT helps us to choose the proper modules to do the required movement. We can generate some structure configurations based on this type of description. We consider the possibility of connection of the different modules and make variety types of configurations by means of flow of force (FOF) and use some evaluation criteria to eliminate the infeasible configurations.
Configuration Generation (Directed Graph Method)
The procedure of the configuration by means of directed graph is like below:
Making the library of the structural modules (primitives) needed to make different configuration according to the required motions to plan the process given by process planner.
Generating the single module complex units with combination of primitive modules based on restriction of the connection of the vertices and directed edges in graph theory.
According to mainflow (regarding to tool) and subflow (regarding to the workpiece) of force (FOF) we can make different alternatives of configuration.
Evaluation of the configuration kinematically, statically and dynamically.
Flow of Force (FOF):
FOF is used to specify the order of the modules if different branches of tool and workpiece. By means of FOF we can make different possible configurations of machine tool that fulfill the motion requirements. Two of machine tool structures used more in industry is XY/ZC and X/YZC. These are symbols to show the moving parts of the machine in tool and work branches. For instance XY/ZC means that the work table has two motions in X and Y direction and combination of the spindle and the column creates one linear motion in Z direction and one angular motion about Z direction named C. The symbols used to show traveling and rotational movements of the machine tool are shown in the figure 2.4:
20
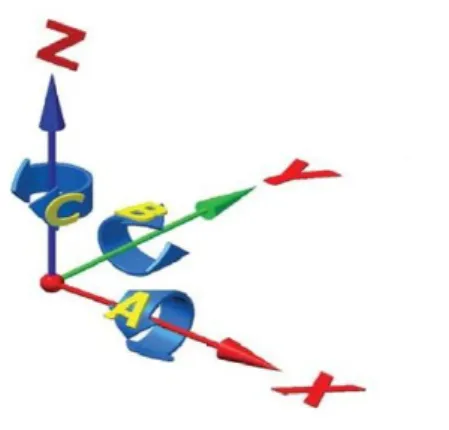
Figure 2.4: Linear and rotational Motions
X, Y and Z are used for linear motions where Z aligns in the spindle orientation A, B and C are used for rotational motions about X, Y and Z respectively. To describe the flow of force we have to branches:
Mainflow of force: flow from the tool point in tool branch to the base or factory
floor as can be seen in figure 2.5.
Subflow of force: flow from machining point of the work branch joining the
mainflow within the machine (Figure 2.5).
Figure 2.5: FOF branches Representation
21
There are some general rules to draw the lines of the flow of force:
Mail FOF starts from the machining point of tool and ends to the floor or any foundation.
FOF only flows in one direction.
FOF flows in positive direction of the local coordinate with the right-hand system.
When two FOFs overlap the counterclockwise one has priority.
When there are more than two FOF in a structure the main FOF nearest to the foundation priority to others.[7]
22
2.2.3. Implementation of Screw and Graph theories
In order to reconfigure the existence machine tool or to generate the new machine tool we need library of modules based on motion requirement needed to produce new variant or to add to or remove from the machine tool to make the desired configuration. Assume we have the below library of modules:
Primitives Figures 1 2 3 4 Spindle Type I Spindle Type II Spindle slider Column
23
According to the primitives (Basic modules) we can make the some modular useful complex units based on possibility of connectivity of the primitives together. We can make a connectivity matrix like below:
Figure 0 shows no connection or impossible connection because of different interfaces and figure 1 shows a connection between two modules.
The only useful complex units of modules can be made in this case is “Spindle Type II” like below:
Terminal Vertices 1 2 3 4 5 6 In itial Ve rtic es 1 0 0 0 1 0 0 2 0 0 1 0 0 0 3 0 1 0 1 0 0 4 1 0 1 0 1 1 5 0 0 0 1 0 0 6 0 0 0 1 0 0 5 2 6 Table Type I Table Type II
24
The next step is determination of the tool and work branches to generate different configurations. According to what explained in flow of force (FOF) the main flow of force passes through the spindle, column and the base and the subflow of force goes through the work, table and base. So, the possible of the modules can make two complex units of mainflow and two of subflow like shows the below table:
Table 2.2: Main flow and sub flow of the force to generate possible configurations To choose the proper modules to make the possible configurations in terms of the kinematic characteristics of the machine tool to fulfill the motion requirements given based on process planner’s specifications we define a task matrix that shows
Sub flow of Force
1 2 Main flow of Forc e 1 2 Spindle Type II
25
the needed movements of the modules of the reconfigurable machine tool then each we define movement matrices of the modules according to the screw theory explained before. The definitions of the matrices are like below:
1 0 0 100 0 1 0 200 Task Mtrix=T= 0 0 1 300 0 0 0 1
Table 2.3: Module motion matrices Module
No. Modules Module Motion Matrices
1 1 1 0 0 100 0 1 0 0 M = 0 0 1 300 0 0 0 1 2 2 1 0 0 0 0 1 0 0 M = 0 0 1 300 0 0 0 1 3 3 1 0 0 0 0 1 0 200 M = 0 0 1 0 0 0 0 1 4 4 1 0 0 100 0 1 0 200 M = 0 0 1 0 0 0 0 1
26
Generally to fulfill the motional requirements for making ma machine tool with n modules the below equation should be fulfilled:
1 2 n
T=M ×M ×...×M
In our case we need combination of two modules to make the required
configuration for linear motion of 200, 100 and 300 mm in directions of X, Y and Z respectively. If choose module number 1 of table 2.3 then the next module should have a motion matrix like below:
1 -1 x 1 1 0 0 100 1 0 0 0 0 1 0 200 0 1 0 200 M = T×M 0 0 1 300 0 0 1 300 0 0 0 1 0 0 0 1 3 1 0 0 100 0 1 0 0 M 0 0 1 0 0 0 0 1
It means the next module that fulfills the required motion is module number 3. Similarly if we choose module number 2 then:
1 -1 x 2 1 0 0 100 1 0 0 0 0 1 0 200 0 1 0 0 M = T×M 0 0 1 300 0 0 1 300 0 0 0 1 0 0 0 1 4 1 0 0 100 0 1 0 200 M 0 0 1 0 0 0 0 1
It Mean combination of the modules 2 and 4 makes the proper configuration of required movements.
27
So, among four different configurations of table 2.2, two of them can make machine tools with three linear and one angular required motion. Configuration 21 can not move in Y axis direction and Configuration 12 has one unnecessary motion in Y axis direction.
From table 2.2 the suitable configurations in terms of kinematic characteristics are configuration11(X/YZC) and configuration 22 (XY/ZC) as shown in below figures:
In order to show the different arrangements of the motions to make machine tool structure we can use symbols like Y/XZC, XY/ZC and so on. ”/” shows the foundation or the common base of the work and the tool branch. The right side shows the tool branch and the left side shows the work branch of the force flow. After generating the variant configurations we need to evaluate them and choose the best one the suits our requirements. There are some evaluation criteria to assess the generated RMTs to get cost-effective and stable structures with the least
redundancies.
28
2.2.4. Configuration Evaluation
Two most important things should be considered to make RMT are cost and stiffness that causes accuracy. To get these two we can imagine some solutions. First, we can make physical experiment to check the dynamic stability or chatter and use the finite element analysis to check the structural stiffness. Since the number of the configuration of RMT is mostly high it is costly and time consuming to make all of the generated structures and make experimental test and do finite element analysis by some softwares (CAE module of some softwares like NASTRAN, ANSYS, COMSOL and so on).So, the economical and logical way is using some criteria to eliminated some of the improper configurations and finally for the limited left configurations do analysis by CAE and experimental tests. These criteria are like below:
Work envelope
Ideally, the designed RMT work envelope should be the same as the required one. If the designed work envelope be less than range of the required envelope then machine tool does not cover the range needed to machine the workpiece and if it is much larger machine has over designed that means higher cost without any added value. There is an index to define the measure to check if the work envelope is in an acceptable range like below[8]:
n i=1 R of Design WVI= R of Requirement i i
WVI: Work volume indexR i : is the range of movement
WVI should be between 1 and 1.5. if it is less than 1 it is not acceptable because it does not cover the whole of the machining pace and more than 1.5 the machine tool is over designed and we should pay unnecessary cost.
In the two configurations I made the Work volume index is ideal (WVI=1) because it covers exactly what is needed not less and not more.
29
Degree of freedom (DOF)
The Degree of the freedom should be as low as possible because each DOF causes more instability and needs its own control that means an extra cost without added value and generates instability to be controlled.
For the generated configurations the configurations12 was has one unnecessary degree of freedom in Y direction. So, it would cost without any added value and it would be a negative point for dynamic stability and we can eliminate according to this criterion.
Number of the modules
Number of the modules to satisfy required motions should be the least because more modules means more interfaces and each interface has its own problem of accuracy to be dealt with it means generally if we have an RMT then we will get a product with lower quality. In my case the number of the modules is the same for all of the configurations.
Dynamic Stiffness
One of the important characteristics of machine tools is their dynamic stiffness. To prevent chatter and have better quality of the machined product we need to control the vibration of the modules. To control the vibrations we can do some test on the configuration. It can be done by some sophisticated dynamic simulation softwares like LMS, ANSYS and so on.
Dynamic and Static Behavior: By some dynamic simulation softwares we can
realize that some configurations do not have essential static and dynamic behavior. Three important factors can affect:
Number of the degree of the freedom (DOF): Configuration with more degree of freedom has less stability. So, the generated machine tool with low DOF that can make necessary movements is the best.
Module Material: Since the natural frequency of the machine tool have a reverse relationship with the mass and mass properties differs for different materials, the material of the modules can affect the dynamic behavior of the RMT.
30
Overall Geometry of RMT: One the parameters that affect the natural frequency of the RMT are its stiffness and stiffness depends on geometry of the machine and its material that is made by the modules. So, we can eliminate some of the configurations that are obviously infeasible in terms of their geometry.
31
Chapter 3
Enabler of generation of RMTs
Since RMT is a solution to the fluctuation in customer demand and demand of the new products to survive in competitive market based on its cost-effective and rapid change to produce high quality products, we need some enablers that enable us to generate RMTs rapidly in a cost-effective way. Before explaining about this enabler I should notice again that reconfigurable machine tools are good solution only when we have different types variants with medium volume in product families otherwise this type of machine tools are not economical (for instance it is more economical to use dedicated production lines for a single product with high volume). Essential enablers are open-architecture controllers, standard interfaces and integrated softwares. By means of these three we can make new configuration or reconfigure the existence RMT rapidly and accurately.
3.1. Open-architecture controllers
As it is explained before, reconfigurable manufacturing systems are modular in different levels of line, machine and parts of the machines. This modularity is for both hardware and software. One important part of the RMS that includes the RMT control should be modular in terms of hardware and software to enable us to reconfigure machine tools without changing the whole control system but changing some hardware and software that suites the new modules of machine consequently. IEEE defines Open-architecture as” an open system provides capability that enables properly implemented applications to run on a wide variety of platforms from multiple vendors, interoperate with other system applications and present a consistent style of interaction with the user”[1].
The base of open-architecture controller is a neutral platform that is an electronic hardware component like computer board that some cards are connected to them and a software to run that card. The software system of the open-architecture controller has three components:
Operating system
Configuration system to connect the modules to the platform
Communication system to transfer information between different modules mounted on the platform.
32
Figure 3.1: Configuration of the open architecture platform for open architecture reconfigurable control system[9]
The open-architecture controller structure is like a computer. Platform is like motherboard and the hardware modules are like sound or graphic card that sit in slots (interfaces) of the motherboard. Software modules are like computer programs after installing for instance window as operating system. There is also communication between the software modules and there should not be any conflict between them.
3.2. Interfaces
To make RMT, one of the most important enablers is interface. Interfaces make the connection of the modules together and generally the reconfiguration process possible because reconfiguration is possible when the modules can connect together properly. There are three main interfaces: mechanical, power and informational or control interfaces.
Mechanical interfaces are used to connect the modules mechanically like screws, keys and so on.
Power interfaces are the interfaces to transfer power between the modules .The power can be electric, hydraulic or pneumatic.
Informational interfaces are used to transfer information among modules and control network generally.
33
The Figure 3.2 shows different types of interfaces of modules in RMTs.
Figure 3.2: machine module interfaces[3]
We need an interface standard to connect different modules from different suppliers to make RMT according with. Interfaces are one of the most important enablers to enable us to make itpossible to connect different modules mechanically and in terms of power and information transfer and make a stable machine tool also.
3.3. Integrated Software
As it was explained before, three main bases of every manufacturing company are lower cost, higher quality and rapid responsiveness to survive in competitive global market. Reconfigurable manufacturing is a new concept that makes manufacturing cost-effective while it has rapid responsiveness. As I discussed in previous chapter, to implement this concept we need some methodologies to choose proper modules to make suitable machine tool that can fulfill the requirements of process given by process planner. To do that there is some mathematical method based on screw theory and graph theory as a unique method to reconfigure the structure of the machine tool for increase or decrease of the production volume or making new variants of products. If we want to summarize the methodology of the reconfiguration it is like below:
Taking the process specification from process planner. Process planner defines the process specification based on the volume of the products and variants he got from sales and marketing department which is responsible for customer demand.
34
To create the motions of the required process we should combine the premade modules from the module library.
We know which modules can be connected together based on connectivity matrix.
We should determine the modules of the mainflow and subflow branches. Then we make variants of possible configurations.
We evaluate the configuration to eliminate infeasible configurations at the first step. As I explained it is impossible to use the traditional method to refine the infeasible structures because it is time consuming and costly. Traditional methods of checking stiffness and dynamic stability are finite element analysis and experimental tests.
Check the final configurations based on kinematic, static and dynamic requirements.
As the number of the generated configurations is practically high, we need powerful integrated software as a tool to make the configurations and test them rapidly in a cost-effective way. The software should be able to:
Making 3D model of the modules and consider them as library of the available modules.
Define the corresponding module motion matrices (by user) that can give us the required task matrix by combination.
Generate possible configurations based on some rules defines to connect them and fulfill the motion requirements.
Test the possible configurations by kinematic (motion), static and dynamic simulations.
Give us the 3D best configuration model.
Briefly, the software should be able to get the motion requirements as input and give as the proper configuration as output after simulations. There is a software called PREMADE (Program for REconfigurable MAchine tool DEsign) that is used by Engineering Research Center (ERC) for Reconfigurable Manufacturing Systems of Michigan University. Below figure shows the steps of making configuration by this software we discussed above [10]:
35
Configuration Generation and Evaluation
Figure 3.3: an example of a commercial software to generate and evaluate an RMT Task Definition Selection of Modules from Suppliers Structural module Design
36
This software does not include stiffness and dynamic evaluation modules and it should be used with some CAE modules of other softwares.
The software I worked with to do my thesis is NX 7.5 that is a PLM Software made by Siemens Company. NX 7.5 is integrated software including CAD, CAE, CAM, Machining Knowledge Editor, Knowledge Fusion, Motion Simulation and some other modules.
How we can use NX software to generate RMT
As explained before a powerful software is needed as enabler to make a rapid reconfiguration possible. We do it in below steps:
1. Making the 3D modules and put them in the library to make the machine
tool structure by different arrangements of the variant modules.
2. Define some rules to specify the possibility of the connectivity of the
modules and the mathematical module motion matrices for each module in the library of the modules. The rules can be defined by Knowledge Fusion application of NX 7.5. In fact we can make a knowledge base for the modules of library.
37
3. Assembly of the modules can be done based on the modules and
knowledge base made by knowledge fusion.
4.
Motion simulation analysis
is used to check if it covers the whole machining area. We can do it by defining some links and joints and the direction and range of movements of the components.38
5.
Dynamic and Static Analysis can be done by NX Design Simulation in
below steps: Defining the model Meshing the model
Defining the material of the components Applying load to the components
Constraining the parts Solving
Getting the critical points in terms of maximum stress and deformation.
Post processing
We do the simulation analysis after applying some evaluation criteria like workforce coverage, number of the DOF and so on that I explained about them in the previous part.
After dynamic and static analysis we can consider some indices that can refine the remained configurations and get the optimized configuration on the basis of the degree of the reconfigurability and ease of reconfiguration. These indices differ case by case and depend on the case requirement and application.
39
One of the most important factors in industrial activities is ease of use of the equipments by operators with medium knowledge (non-experts) and using the fewest number of tools to change or repair them.
One of the useful indices that I tried to define is difficulty of reconfiguration. If reconfiguration of the machine tool needs a pile of information in the format of instructions (i.e. it is very complex to change the modules) then we need some experts to consult with or they should be in the factory while making reconfiguration. Also, it will need some expensive complex tools to do reconfiguration. These two are costly and need long time to change modules according to the new requirements and with long term perspective they are not suitable structures because the aim RMT is having a machine tool that is cost-effective and rapid responsiveness. The index I defined can measure the difficulty of reconfiguration and the configuration with lowest index is the best choice.
41
Chapter 4
Measuring Reconfigurability for Design Evaluation
After generation of the configurations and evaluation on the basis of the criteria and applying some dynamic and static and kinematic analysis, the last stage is to get the optimized RMT by some reconfiguration Indices. Two of them are explained in this chapter.
4.1. Evaluation of Ease of Reconfiguration
One of the important things of generated configuration that should be evaluated is its ease of reconfiguration. In order to do that we should define an index to measure the reconfiguration difficulty then structure with the lower reconfiguration difficulty index (RDI) will be the best in terms of reconfiguration. Reconfiguration ease means capability of decoupling some modules of machine tool and assembling the new modules with least effort and fewer tools and instructions to make a stable and logically accurate structure that fulfills the motion requirements in a cost-effective and rapid way. This index helps us to understand how the end user in the factory can reconfigure the machine tool with the least knowledge and tools because if the reconfiguration needs complicated tool and some experts it may economically does not worth to have such RMT.
First of all we should define different steps of reconfiguration and then deal with the problem of difficulty of the reconfiguration then determine a proper index to measure ease/difficulty of reconfiguration. The steps of reconfiguration are:
Figure 4.1: Steps of Reconfiguration[11] Process Requirements Definition Possible Configuration Generation Refine After Preliminary Evaluation
Decoupling Reorganizing Coupling Test
1 2 3
42
Step 1: We define the requirement of process in this step.
Step 2: We generate possible different configurations that fulfill the requirement
defined in step 1.
Step 3: In this step the evaluation of the configurations done and we eliminate
infeasible configurations.
Step 4: To make the desired configuration we should decouple and change some
modules with new ones or rearrange some modules. In this step we remove some modules.
Step 5: We do setup process like programming, configuring internal parameters to
prepare the modules to assemble and make the new configuration.
Step 6: In this step we assemble the prepared modules together.
Step 7: Testing the final configuration to see if it fulfills the requirements.
As it can been seen from the above model of reconfiguration process the steps 4 to 6 is related to the ease / difficulty of the reconfiguration. The higher the number of the number of the interfaces is the more difficult to decouple and assemble the new configuration will be. On the other hand, the more complex the interfaces are the more setup process time and effort needed and the more difficult the more difficult steps 4 and 6 will be.
To define the reconfiguration ease / difficulty index we define some criteria to evaluate the ease of reconfiguration. These criteria should have some conceptual and quantitative scales to measure this index. According to the reconfiguration steps I explained above we can categorize the criteria into two groups like below that are some criteria concerning the modules and their connections (interfaces):
4.1.2. Number of the modules
The more the number of the modules, the harder the reconfiguration of the structure of the machine tool for new operation(s) or increase the production rate. When the number of the modules is high then it takes more time to change the modules to the new structure. The other problem is some misalignments and required calibrations and instability because of more joints. So the configurations with fewer modules are better candidates for reconfiguring them in the future with less effort.
43
4.1.3. Interface complexity
According to what explained in machine module interfaces we have three types of interfaces: mechanical, information and power. The more complex and non-standard interfaces the harder reconfiguration.
If different modules are supplied from different suppliers then to fit the mechanical joints of modules that sometimes have design to work with different powers is problematic.
The interfaces those are easy to plug and produce with less need of complicated instructions and skill, save time and energy and make reconfiguration easier. Having an interface standard is a must for this purpose.
Figure3.8: Different Types of Interfaces
Since we are looking for a configuration that has all of the above characteristics, an index to evaluate the reconfiguration ease should be combination of the all above criteria with considering the importance of each of criterion in compare with each other by defining some weights.
We can define Reconfiguration difficulty Index (RDI) like below: n
1 1 2 2 i
i=1
RDI=w C w C while
w =1RDI: Reconfiguration Index for each configuration w: weight of the ith criterion in compare with others. C:criterion measure
Minimum value of RDI for each alternative shows the structure is easier to be reconfigured.
44
Calculation of the Ci:
In order to calculate RDI, at first we need to achieve Ci.
For the number of the modules Ci is defined like: cm 1 cm max (N ) C = (N ) i
Where C1 is a division of number of the modules of ith configuration that can be changed (N )cm iby maximum number of the changeable modules among the alternatives of generated configurations (N )cm max.
For the interface complexity we need to explain about information contents and
how we can measure information and get a quantitative coefficient in order to calculate C2 for second criterion.
The information itself is closely related to designer’s specification and capability of manufacturing. For instance when the tolerance of the product proposed by designer is too tight then it needs more information content to make that product efficiently and when a factory does not have high technology equipments to produce some products then we need more information to make them well. So, there should be a proper cooperation between design and production.
Accordingly the information content has relationship with probability of success to make a product. When the complexity of the product is less then the probability of the success to make it more and it needs less information to do. It means that to measure the information content we should look for an index that shows this relationship. The information content can be defined like below:
2 2 1 p I=log ( ) p Where: I: information content
p1: probability of success before getting information p2: probability of success after getting information
45
After receiving some information, we expect the system works 100% well and then the above equation becomes:
2 2
1
1 1
I=log ( )= log ( )
p p
Since the base of the logarithm is 2, if we rewrite the above equation in terms of natural logarithm then we have:
1
I=K ln( )= -K ln(p) p
Where K=1.443.
According to above equation when the probability of success (of manufacturing, assembly …) is 100% then the information needed to do the job is zero it means the job is very easy (not complex) to do and needs no information. Information can be something like steps of guidance in an instruction to join modules together by means of their interfaces.
For a system with some independent functional requirements the information of the whole system is the sum of individuals. For machine tool, as explained in previous chapter, consists of mechanical, power and information interfaces. The power interfaces can be electric, hydraulic or pneumatic.
We assume all of above three are independent of each other and consequently the information content of the whole system is like below:
2 1 2 3 1 2 3
1 2 3
I= C = I +I +I = - (logp +logp +logp )
= -1.443 ln(p ) ln(p ) ln(p )
Where:
I1, I2 and I3 are the information required to fix two modules together for mechanical, power and informational interfaces respectively and I is for the whole system. p1, p2, p3 are the probability of success of mechanical, power and informational interfaces respectively before getting some information by the system.
46
These probabilities can be achieved by the some historical data, operators and production engineering experience. For instance the number of failure out of the total tries can give us a probability based on historical data.
The more complex is the interface the less the probability of success is and the more information is required and we get a higher C2.
If we want to summarize the reconfiguration difficulty index we have:
cm 1 1 2 2 1 2 1 2 3 cm max (N ) RDI= w C +w C = w - w 1.443 ln(p ) ln(p ) ln(p ) (N ) i The next step is getting the values of w1 and w2. Since it is practically obvious that the interface complexity is a bigger cause against reconfiguration ease than number of the modules then w2 is bigger than w1. These weights can change case by case based on experience and historical data.
4.2. Machine Tool Reconfigurability Rate
Another important scale to refine the generated configurations after dynamic and static analysis and geometry accuracy to propose the best structure as machine tool is reconfigurability of machine tool. This index shows the ability or flexibility of a generated configuration to be reconfigured. The important parameters that affect reconfigurability rate are possible reconfiguration numbers, number of the structural components (modules), auxiliary operations and the possible degree of the freedom (motions) of the cutting tool. The below equation proposed by Carles Riba et al shows the effect of these factors on machine tool reconfigurability[12]:
Aop cm MT conf. Stc N .N R =0.368 .ln(N ).ln( ) ln(N ) Where:
RMT: Reconfigurability of Machine Tool.
Nconf: Number of the possible configuration to make different operations like milling, turning…
NAop: Number of the auxiliary operations to develop the machine tool. Ncm: Number of cutting tool motions.
47
The value of RMT is between zero and one. The higher the value of RMT the more reconfigurable machine tool we have.
There is another index proposed some Chinese researchers of Beijing Jiaotong University that is based on the above equations but includes the ease of reconfiguration and flexibility of the structure of machine tool at the same time and is more comprehensive than above two equations.
This equation is [13]: ( 0.2) 1 1 RI= ln( ).ln( ) ln((( ) 0.8) ) / ( ) ln( ) b Aop AR Ced N N N Mct CF Cpf Ca Aop i b i BM AM N N N N D s N N
i1,if Aop is selected s = 0, otherwise CF BM AM N N N Where:
NCF: Number of possible configurations to do generic technological operations. NMct: Number of the translational and rotational motions of cutting tools.
NBM: Number of the basic modules for all of configurations. NAM: Number of the auxiliary modules for all of configurations.
NCpf: Number of cutting profile that develop the organ of the machine tool.
NCa: Number of the different cutting area which can execute the organ of the machine tool.
NCed: Number of the cutting edges.
NAR: Number of adding/removing steps required to change the module layout of configuration
NAop: Number of auxiliary operations. DAop: Difficulty of Aop.
48
The reconfigurability degree has an optimum value. The higher value of reconfiguration has some costs. The costs of reconfiguration are:
Module cost
Cost of inventory of Module
Tools needed to mount and disassemble
Experts wage to do the reconfiguration or give instruction depending on case
So, to get sure that the reconfigurable machine tool is cost-effective, we should consider all of the above costs and we should pay attention that the case of single product with high volume, RMTs are not a good choice and it is preferred to have dedicated machine tools.
49
Summary
To summarize the machine tool design, the highlight points are:
Reconfigurable machine tools are cost-effective and rapid responsive
solution for global competitive market with changes in customer
demand volume and variety of products.
RMT is economical for medium volume of the products and high
variant in production line and fills the gap between dedicated machine
tools and CNCs.
To make RMT possible to use we need some enablers like: interface
standards, comprehensive software and an open-architecture controller
system.
The steps of making RMT are :
Getting the process requirements from the process planner.
Analyze the required motions to make the product by defining
task matrix.
Creating library of the modules and their motion matrices.
Fulfill the mathematical formula of the task matrix and module
matrices.
Creating the connectivity feasibility of the modules matrix.
Specifying the work (sub) and tool (main) branches of the flow
of force.
Making the matrix of the subflow and mainflow of force.
Generate all possible configurations based on the above matrix.
Evaluate the configurations based on some criteria to eliminate
infeasible configurations.
Doing dynamic and static analysis to test the stability of the
configurations.
The last stage is using some reconfiguration indices like RDI
and RI to get the optimized structure.
50 Process Requireme
nts
Motion Analysis and Defining Task
Matrix
Generating Module Library and Their Matrix
Calculating the Reconfiguration
Indices
Fulfill the Task Matrix by Module Motion Matrices Applying Evaluation Criteria Generating FOF matrix Generate the Possible Configuration s Making Connectivity Matrix Drawing FOF on Work and Tool Dynamic and Static Analysis Achieving the Optimized Configuration Configurations Generation Step Evaluation and Analysis Step Getting Optimized Configuration Step Steps of RMT Design
51
Future Works
RMT is a concept that makes the simultaneous change in product and production line (concurrent engineering) possible. To implement the RMT concept in reality we need to have some tools and standards like interface standard and comprehensive integrated software. The two important works in the future that helps us to design and make RMT are:
![Figure 1.1: Reconfigurable tools fill the gap between dedicated tools and flexible tools.[3]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4279615.95188/10.892.168.714.698.936/figure-reconfigurable-tools-gap-dedicated-tools-flexible-tools.webp)
![Table 1.1: Comparison between DML and FMS.[1]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4279615.95188/14.892.234.678.265.557/table-comparison-between-dml-and-fms.webp)