VTE notat Nr 15-1995 Titel: Författare: Resursgqgrupp : Projektnummer : Projektnamn: Distribution: Uppdragsgivare: Utgivningsår: 1995
Samband mellan vissa olyckstyper och trafikens fördelning på olika situationer
Anna Anund
Trafikteknik (74368-2) 20157
Integrerat mätsystem för trafik-och olycksanalys TransportForskningsBeredningen (TFB) Fri div Väg- och transport-forskningsinstitutet ä
FÖRORD
Jag vill framföra ett tack till Göran Nilsson, VTI, för den handledning han bistått mig med under arbetets gång.
Jag vill även tacka Urban Björketun, VTI, för hjälp med dator-programmen i (statistikpaketet) SAS samt Kristina Bernhardsson, VTI, för att hon redigerat och skrivit ut notatet.
Anna Anund
INNEHÅLLSFÖRTECKNING Sid SAMMANFATTNING I 1 SYFTE l 2 BAKGRUND 2 3 DATABEHOV 5
3.1 Vilka data är intressanta? 5
3.2 Trafikdata 7
3.3 Olycksdata 9
3.4 Program 9
4 VÃGTYP - TIDLUCKOR, HASTIGHETSSKILLNAD M M - lO TRAFIKSITUATION
4.1 Andel fordon i kö 10
4,2 Variation i köandel mellan olika vägtyper 11 4.3 Variation i köandel under dygnets timmar 12 4.4 Variation i köandel på en mätplats mellan 13
olika år
5 METOD 14
5.1 Genomsnittligt trafiksituationsmátt för 1989 14
5.2 Prediktionsmodeller 15
5.3 Vilka variabler predikterar olyckskvoten bäst? 17
6 SLUTSATS OCH FORTSÄTTNING 19
7 REFERENSER 21
BILAGA 1: Andel fordon i kö i förhållande till flödet
BILAGA 2: Förändring i köandel under dygnets timmar BILAGA 3: Förändring i köandel pa en matplats från
år till är
BILAGA 4: Olyckskvoter och andel fordon i olika tra-fiksituationer
BILAGA 5: Regressioner frán kapitel 5.2
BILAGA 6: Stegvisa regressioner frán kapitel 5.3 BILAGA 7: Korrelationer
BILAGA 8: TA89 beskrivning
BILAGA 9: Bidrar kunskapen om antal trafiksitua-tioner med någon information för att för-klara olyckskvoten, utöver vad flödet redan gör?
Samband mellan vissa olyckstyper och trafikens fördelning på olika situationer
av
Anna Anund
Statens Väg- och transportforskningsinstitut 581 95 Linköping
SAMMANFATTNING
Utifrán ett förslag till integrerat mätsystem för trafik- och olycksanalys har samband mellan olyckor och olika definierade olyckssituationer baserade på händelser i trafiken analyserats. Modellen för arbetet har sett ut enligt följande:
Olyckor
Vägtyp
*r
A
B
TIdIUCkOI'
Hastighetsskillnad
m m
UTrafiksituation
Illustrationen avser att beskriva sambandet mellan olyckor och olika situationer baserade på trafikdata (A) och hur händelserna
(B) definieras i trafiken.
Projektet har bekostats av TransportForskningsBeredningen, TPB. Mängden situationer i trafiken som kan leda till olyckor, olyckssituationer, har skattas med trafiksituationer baserade på trafikdata. Trafiksituationerna har beräknats genom att klassificera fordon i fyra grupper med avseende på tidluckor och hastighetsskillnad mellan parvisa fordon.
II
Grupperna har kallats: - fria fordon
- fordon i omkörningssituation - fordon i kö
- fordon som just blivit omkörda
Skattningarna har baserats pá verkliga mätningar i trafiken. I analysen har 18 mätpunkter, från olika vägtyper på det statliga vägnätet, ingått. För var och en av mätpunkterna har genomsnitt-liga trafiksituationsmátt beräknats för mätningar utförda 1989. Trafiksituationsmátten är andelen fordon i de olika
trafiksitua-tionerna.
Trafiksituationsmáttet andelen fordon i kö, valdes för att se hur ett av trafiksituationsmátten varierade i tiden och för att studera vilka skillnader som förelag mellan olika vägtypers antal trafiksituationer. Resultaten visade att olika vägtyper hade olika andel fordon i kö. Det förutsattes att resultaten gällde även för de tre andra trafiksituationsmátten.
Olyckor i trafiken klassificeras i olyckstyper beroende på den primära orsaken till att olyckan inträffade. I analyserna ingick olyckor som inträffade under 1988-1989 på hela det statliga väg-nätet. Olyckskvoten för olyckstyperna singel-, upphinnande- och omkörningsolyckor har använts.
Tidigare undersökningar har visat, att olyckskvoterna skiljer sig åt beroende av vilken vägtyp de inträffat på, se referens 5. Då bade andelen fordon i olika trafiksituationer och olycks-kvoterna förändras beroende av vägtyp, var det möjligt att studera om det fanns ett samband mellan olyckskvoterna och tra-fiksituationerna, förutsatt att effekten av andra variabler
hölls under kontroll.
III
Den forsatta undersökningen delades i två analyser. I den första analysen jämfördes tva linjära regressionsmodeller. I den ena modellen ingick endast trafiksituationsmáttet som förklarings-variabel och i den andra ingick en mängd vägtypsvariabler, t ex vägbredd, trafikflöde och hastighetsnivá. Resultaten visade inte på någon större skillnad mellan modellernas förmåga att predik-tera olyckskvoten. Valet av modell beror på vilka variabler som
är enklast att mäta och tolka.
I den andra analysen utfördes en stegvis regression. Förkla-ringsvariablerna vägbredd, trafikflöde, hastighetsnivá, hastig-hetsbegränsning, trafiksituationsmáttet samt en variabel för om det var motortrafikled eller inte prövades i modellen. I en stegvis regression konkurrerar alla variabler med varandra och det är möjligt att ställa krav så att endast variabler med en betydande effekt för att förklara olyckskvoten blir kvar.
Resultaten visade att de betydande variablerna för att förklara olyckskvoterna var:
- vägbredd för singelolyckorna
- trafiksituationsmáttet och hastighetsnivá för upphinnande-olyckorna
- trafiksituationsmáttet för omkörningsolyckorna
Ett alternativt sätt att erhålla trafiksituationsmátten för olika vägtyper kan vara genom simulering. Den gör det även möj-ligt att variera valet av variabelvärden, vilket är begränsat vid empiriska studier.
l SYFTE
Projektet har bekostats utav TransportForskningsBeredningen,
TFB. Syftet med projektet har varit att analysera om det finns
ett samband mellan olycksrisker för olika olyckstyper och mängden situationer i trafiken som kan leda till olyckor.
2 BAKGRUND
Utifrån en rad undersökningar har sambandet mellan trafiksäker-het och hastigheter i vägtrafiken visats. Det är en av anled-ningarna till att det är viktigt att följa hastighetsutveck-lingen. Det finns en mängd faktorer som påverkar hastighetsut-vecklingen över tiden, till exempel trafikutvecklingen, trafik-och trafikantsammansättning, variationer i väglag trafik-och väderlek m m. En modell för ett samtidigt trafik-, hastighets- och olycksanalyssystem framgår av figur 1.
Olyckor
A \
\
Hastigheter
_
Trafik och
..
Traflk-
trafikant_
Vaglag
intensitet
sammansättning
och väderlek
Figur 1 Integrerat mätsystem för trafik- och olycksanalys.
VTI genomför årligen hastighetsmätningar på ett 60-tal platser i landet. Hastigheten mäts minst fem gånger per år på samma plats
och motsvarande dygn. Resultaten används som en skattning av
hastighetsförändringen på nationell nivå. Härvid förutsättes att inga andra förändringar har inträffat på mätplatserna, vad avser till exempel fordons- och förarpopulationen, resvanor och vägens
standard.
Sammanfattningsvis kan skattningen av hastighetsförändringen över tiden, med hjälp av hastighetsmätningar, endast i begränsad utsträckning användas som ett "isolerat instrument" för att ange hastighetsutvecklingen och förklara olycksutvecklingen, eftersom de övriga faktorerna förändras i tiden och även påverkar
trafik-säkerhetssituationen.
Vid normala hastighetsmätningar erhálls hastighetssituationen för en viss punkt på vägnätet. Kunskap om sambandet mellan has-tigheter och trafiksäkerhet finns bara på aggregerad nivå och då i form av samband mellan förändringar avmedianhastigheter eller medelhastigheter och förändringar av trafiksäkerhetssituationen. Ofta innebär en förändring av hastighetsgränsen att såväl medianhastigheten som spridningen ändras. Det gör det svårt att isolera effekten av hastighetsförändringar respektive förändrad hastighetsspridning.
I den ofta refererade undersökningen utförd av Solomon på 1960-talet, se referens 2, redovisas fordonsolycksrisken som en funktion av olycksfordonens avvikelser frán medelhastigheten. Bäde positiva och negativa avvikelser medförde högre fordons-olycksrisker och ju större avvikelser frán medelhastigheten desto högre fordonsolycksrisker.
Ofta missuppfattas detta resultat och sammanblandas med olycks-risker, som ofta avser olyckor med minst två fordon inblandade, samtidigt som det krävs en hastighetsskillnad mellan de inblan-dade fordonen, för att olyckor i samma trafikström ska inträffa. Solomons resultat och motsvarande resultat från liknande under-sökningar visar att hastighetsspridningen spelar en betydande roll för olycksuppkomsten, vilket är naturligt, samtidigt som de som kör avsevärt saktare eller fortare än genomsnittshastigheten blir överrepresenterade i situationer av typen omkörnings- och upphinnandesituationer.
I denna typ av undersökningar finns det en direkt koppling mellan hastighetsdata och olycksdata, genom att det för de i olyckorna inblandade fordonen finns hastighetsdata. Bristerna i var nuvarande kunskap är att det inte finns en direkt koppling mellan olycksdata och hastighetsdata dvs det finns inga hastig-hetsdata för olycksfordon. Ett av målen med ett hastighetsmät-ningssystem borde vara att kunna koppla hastighetsdata till förekomsten av olika situationer som i sin tur kan relateras till motsvarande olyckstyper.
Att studera sambandet mellan trafik- och hastighetsdata och olycksdata för olika trafikmiljöer är komplext. Syftet med denna rapport har primärt varit att behandla följande frågeställ-ningar:
- Hur skall antalet olika trafiksituationer, som kan knytas till
olika olyckssituationer skattas utifrân registrering av
trafik- och hastighetsdata i olika väg- och trafikmiljöer? - Kan data om trafikflöde, hastighetsnivä, tidluckor och
hastig-hetsskillnader mellan fordon i punkter av vägnätet beskriva sambandet mellan trafikdata och olika olyckstyper, i olika vägmiljöer?
- I vilken utsträckning varierar andelen fordon i olika trafik-situationer i tiden och mellan olika grupper av vägmiljöer. För att kunna belysa dessa frågeställningar har de samband som illustreras i figur 2 behandlats.
Olyckor
Vägtyp
A
B
Tldluckor
Hastighetsskillnad
m m
Trafiksituation
0Figur 2 Samband olyckor och trafiksituation (A) samt defini-tion av trafiksituadefini-tion frän trafikdata (B).
Illustrationen avser att beskriva sambandet mellan olycks/skade-risker och olika situationer baserade på trafikdata (A) och hur dessa händelser definieras (B)i trafiken?
3 DATABEHOV
3.1 Vilka data är intressanta?
Om hastighetsdata ska kunna integreras i ett informationssystem för trafiksäkerhetsarbete krävs samtidigt olycksdata, trafikdata och Vägdata i vilket även väglagsdata bör ingar.
Intressanta data i ett informationssystem bör vara följande; Olycksdata
Inblandade fordon Färdriktning
Fordonens sidoläge
Förekomst eller inverkan avandra fordon
Olyckssituationen och de inblandade fordonens hastigheter Trafikdata
Sidoläge för enskilda fordon
Tidlucka, avstånd och skillnad i sidoläge mellan parvisa fordon Förekomst av och sidoläge hos mötande fordon
Hastighetsdata
Hastighetsdata för enskilda fordon
Hastighetsskillnader mellan parvisa fordon Vägdata m m
Vägbredd, linjeföring, sikt, friktion, väglagsdata m m
Nedan anges de data som bör vara av särskilt gäller olika olyckstyper.
intresse när det
Typ av Sido- Hastig- Hastig- Sido- Tid- Av- Möte fordon läge het hets- läges- lucka stånd
skillnad skillnad
Singel
x
x
x
Upphinnande x x x x x x Möte x x x x Omkörning x x x x x Korsning x xSamtliga olyckstyper är givetvis beroende av vägdata. För singelolyckor och mötesolyckor kan bland annat sidoläget anses vara en avgörande faktor. Upphinnande- och omkörningsolyckor är beroende av varandra dá varje omkörning föregås av ett
upp-hinnande. Skillnaden är förekomsten av mötande trafik och
sik-thinder.
det mellan fordon i primärvägens trafikströmmar.
Korsningsolyckor beror oftast på tidluckan och
avstän-Olyckstyper kan kopplas samman med motsvarande förekomst av den eller de trafiksituationer som kan knytas till olyckan, enligt nedan.
Singelolyckor - ensamma fordon
Upphinnandeolyckor - parvisa fordon i samma trafikström Mötesolyckor - parvisa fordon i motriktad trafikström
samma trafikström samt Omkörningsolyckor - parvisa fordon i
mötande fordon
Korsningsolyckor - parvisa fordon från olika vägar, i motriktade
trafikströmmar eller i samma trafikström.
3.2 Trafikdata
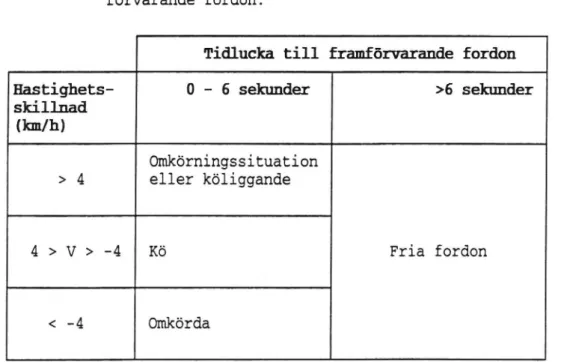
De trafikmätningssystem som finns i dag mäter tidigare nämnda trafik- och hastighetsdata. Flertalet saknar emellertid regi-strering av sidoläge. De data som vi har haft tillgång till var hastighetsmätningar utförda av VTI. Mätningarna utfördes med en utrustning kallad TA89, se bilaga 8, vilken registrerar antalet passager över två slangar. För varje fordon erhölls hastighet, fordonstyp samt tidpunkt för passage. Genom dessa uppgifter har hastighetsskillnaden och tidluckan till framförvarande fordon beräknats för varje fordon. Fordonen har sedan fördelats i olika trafiksituationer enligt definitionen i tabell 1.
Tabell 1 Klassificering av fordonens trafiksituation med hän-syn till tidluckor och hastighetsskillnad till fram-förvarande fordon.
Tidlucka till framförvarande fordon Hastighets- 0 - 6 sekunder >6 sekunder skillnad (km/h) Omkörningssituation > 4 eller köliggande 4 > V > -4 Kö Fria fordon < -4 Omkörda
Valet av klassificeringvad avser hastighetsskillnad och tid-lucka i förhållande till framförvarande fordon bygger dels på de variationer i hastigheter som registrerats för bilköer, <4 km/h, och att en tidlucka av'6 sekunder motsvarar ett avstånd på 150 m
mellan fordonen om båda fordonen färdas med en konstant
hastig-het i 90 km/h. För varje mätplats har den procentuella andelen fordon i fyra trafiksituationer beräknats.
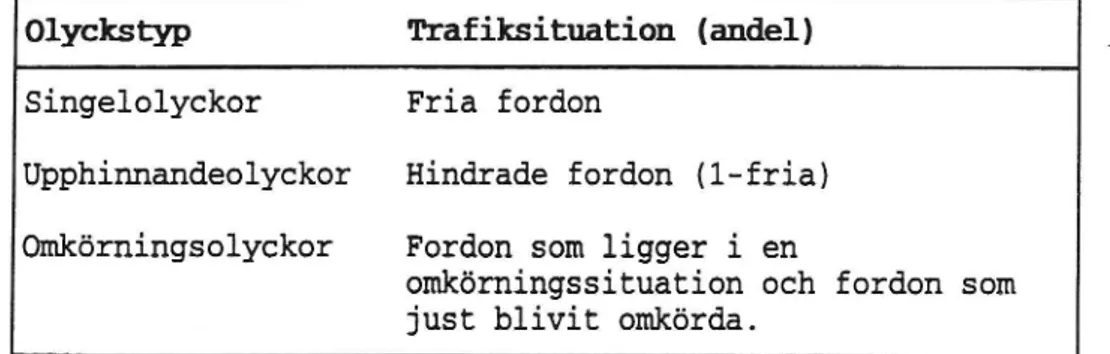
I analyserna har olyckskvot använts. För att erhålla fordons-olyckskvoten krävs det för olyckor av kollisionstyp, i princip, en multiplikation med två dådet oftast är minst två fordon in-blandade. Detta påverkar emellertid inte de utförda analyserna. I analysen har kombinationer av olyckstypernas olyckskvot och uppmätta andelar i trafiksituationer analyserats, enligt
tabell 2.
Tabell 2 Olyckstyp och motsvarande trafiksituationsmátt för analys av samband mellan olyckskvot och trafiksitua-tionsmátt.
Olyckstyp Trafiksituation (andel) Singelolyckor Fria fordon
Upphinnandeolyckor Hindrade fordon (1-fria) Omkörningsolyckor Fordon som ligger i en
omkörningssituation och fordon som just blivit omkörda.
Olyckskvot är en kvot av antal olyckor och trafikarbetet.
Trafiksituation är andelen fordon i relevant trafiksituation.
Fria fordon har definierats som fordon med en tidlucka till
framförvarande fordon på mer än 6 sekunder. Hindrade fordon är de som har en tidlucka till framförvarande fordon på 6 sekunder eller mindre. Fordon som är i en omkörningssituation tillhör de som är hindrade men har en hastighetsskillnad till framförvaran-de fordon pá 4 km/h eller mer. Fordon som just blivit omkörda hör även de till de hindrade fordonen men har en hastighets-skillnad till framförvarande fordon som är -4 km/h eller mindre.
3.3 Olycksdata
Två års olyckor (1988-1989), från hela det statliga vägnätet har
analyserats. Här uppstod det problem som behandlats tidigare:
Det som ska beskrivas är inte olyckskvoten - antalet olyckor av viss typ i relation till antalet fordonskilometer utan fordons-olyckskvoten - antalet olycksfordon per fordonskilometer. För singelolyckor är olycksmáttet detsamma men för kollisionsolyckor är det normalt minst två olycksfordon per olycka. Olyckspopula-tionen har begränsats till singelolyckor, upphinnandeolyckor och omkörningsolyckor.
Olyckorna har hämtats ur vägdatabankens registrerade polis-rapporterade olyckor.
3.4 Program
De datorprogram som har använts för att beräkna interaktions-värden och andra uträkningar har skrivits i BASIC och (stati-stikpaketet) SAS.
10
4 VÃGTYP TIDLUCKOR, HASTIGHETSSKILLNAD MIH -TRAFIKSITUATIONER
Till att börja med var det viktigt att belysa vilka skillnader som förelág mellan olika vägtypers antal trafiksituationer, definierade med avseende på tidluckor och hastighetsskillnader mellan fordon. I detta kapitel redovisas hur ett av trafiksitua-tionsmátten, andelen fordon i kö, varierar mellan olika
väg-typer. De fyra trafiksituationerna definierade i tabell 1
förändras inte oberoende av varandra och vi har därför valt att
endast studera ett av dem, andelen fordon i kö.
4.1 Andel fordon i kö
Tre olika faktorers betydelse för variationen av köandelen har studerats, de beskrivs nedan.
A. Variationen i andelen fordon i kö för olika vägtyper, dä vägtyp definierades av hastighetsbegränsning, vägbredd och flöde?
B. Variationen i andelen fordon i kö på en mätplats under dygnets timmar?
C. Variationen i andelen fordon i kö på en mätplats från år till är?
VTI mäter kontinuerligt hastigheten i ett 60-tal punkter varje år. Mätningarna upprepas vid flera tillfällen under ett är och då på samma plats och motsvarande dygn som året innan. Mät-platserna ligger på raka, plana vägavsnitt.
För att studera andelen fordon i kö användes 15 mätplatser, för-delade pá olika vägtyper, se tabell 3. För dessa beräknades andelen fordon i kö varje timme under ett dygn i juli 1991.
11
Andelen fordon i kö har beräknats för mätplatser som tillhör följande vägtyper:
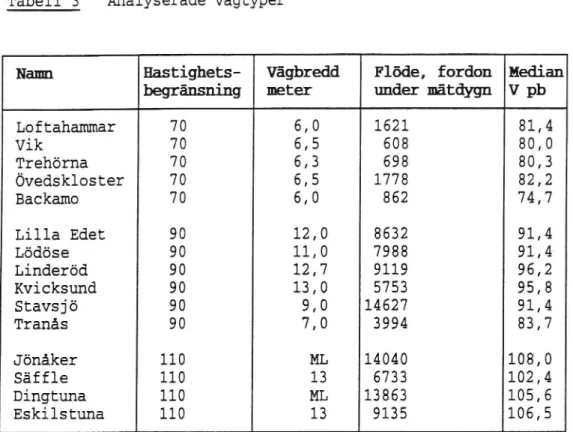
Tabell 3 Analyserade vägtyper
Namn Hastighets- 'Vägbredd Flöde, fordon. Median begränsning meter under mâtdygn V'pb
Loftahammar 70 6,0 1621 81,4 Vik 70 6,5 608 80,0 Trehörna 70 6,3 698 80,3 Övedskloster 70 6,5 1778 82,2 Backamo 70 6,0 862 74,7 Lilla Edet 90 12,0 8632 91,4 Lödöse 90 11,0 7988 91,4-Linderöd 90 12,7 9119 96,2 Kvicksund 90 13,0 5753 95,8 Stavsjö 90 9,0 14627 91,4 Tranås 90 7,0 3994 83,7 Jönáker 110 ML 14040 108,0 Säffle 110 13 6733 102,4 Dingtuna 110 ML 13863 105,6 Eskilstuna 110 13 9135 106,5
Andelen fordon i kö vid dessa mätplatser presenteras i figur 3 och i bilaga 1-3.
4.2 variation i köandel mellan olika vägtyper
Variationen i köandel redovisas i figur 3. Andel fordon i kö anges som funktion av flödet. Varje värde representerar kö-andelen en viss timme på en viss väg i båda riktningarna. Data är för juli 1991.
12
Andel fordon i kö i förhållande till flöde
'/. FORDON l KO 50'1 A025 1 A AM 401 AA AA A A ; A 30j A . A * AA A [9 AA X I* x X X X Y
:
M: A
<
>< ><><
. % X X i _ Å X X 1 x 10-_ M X X i xäél
0 f , . 'T 0 1000 2000 3000 FLÖDE HG ***70 km/h AAA90 km/h 1' 7 ;(110 km/h MM!Figur 3 Andel fordon i kö i förhållande till flöde
Vägar med olika hastighetsbegränsningar hade olika köandel i förhållande till flödet. Pá 70-vägarna var andelen fordon i kö mellan 2 % och 26 % och på 90-vägarna mellan 5 % och 45 % och på llO-vägarna mellan 1 % och 27 %. För llO-vägar finns två grupper, motortrafiklederna och lB-metersvägarna. Störst sprid-ning mellan mätplatserna var det på 90-vägarna. Andelen fordon i kö ökade dá flödet ökade, vilket är fullt naturligt. I bilaga 1 redovisas 70-, 90- och llO-vägarna i separata figurer.
4.3 variation i köandel under dygnets timmar
Resultaten visade att det på 90-vägar och llO-vägar fanns skill-nader mellan mätplatsernas köandel dá varje timme jämfördes, till skillnad från 70-vägarna. Pá vägar med hastighetsbegräns-ningen 110 km/h var andelen fordon i kö mer konstant över tim-marna än på vägarna med hastighetsbegränsningarna 70 och 90 km/h. Köandelen var störst mellan klockan 11 och 18. Se bilaga 2.
13
4.4 variation i köandel på en mätplats mellan olika år Variationen i andelen fordon i kö mellan olika år har analy-serats. Det förutsatte att mätningarna hade utförts vid mot-svarande tid varje år och att inga andra yttre omständigheter hade förändrats. I Vissa mätpunkter fanns det variation mellan
mätningarna, vilket är oönskade effekter av skillnad i
trafik-intensitet och av annan trafik och trafikantsammansättning. Väg-lag och väderlek kan också ha varit olika. Figurerna finns i bilaga 3.
I bilaga 4 finns de värden som figurerna grundats pá.
14
5 METOD
5.1 Genomsnittliga trafiksituationsmátt för 1989
En beräkning av andelen fordon i en viss trafiksituation på en mätplats ett dygn kan avvika från vägens "normala" trafiksitua-tionsfördelning. För att erhålla en genomsnittlig beskrivning av andelen fordon i de definerade trafiksituationerna för ett helt år, har medelvärdet av resultaten från mätningar under 1989 an-vänts. På de flesta mätplatser har 3-7 mätningar utförts för-delade över áret. Dagar da halt väglag har observerats har ej ingått i analysen.
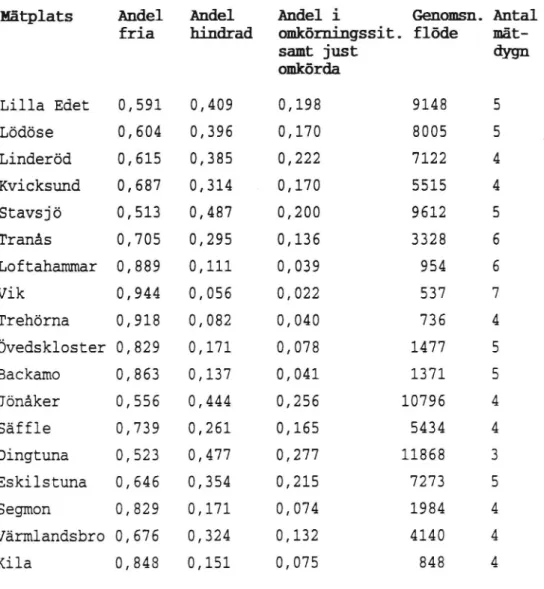
Tabell 4 Genomsnittlig andel fria fordon, andel hindrade fordon, andel fordon i omkörningssituation samt just omkörda fordon och genomsnittligt flöde 1989.
Båtplats Andel Andel Andel i Genomsn. Antal
fria hindrad omkörningssit. flöde
mät-samt just per dygn
omkörda dygn Lilla Edet 0,591 0,409 0,198 9148 5 Lödöse 0,604 0,396 0,170 8005 5 Linderöd 0,615 0,385 0,222 7122 4 Kvicksund 0,687 0,314 0,170 5515 4 Stavsjö 0,513 0,487 0,200 9612 5 Tranås 0,705 0,295 0,136 3328 6 Loftahammar 0,889 0,111 0,039 954 6 Vik 0,944 0,056 0,022 537 7 Trehörna 0,918 0,082 0,040 736 4 Övedskloster 0,829 0,171 0,078 1477 5 Backamo 0,863 0,137 0,041 1371 5 Jönáker 0,556 0,444 0,256 10796 4 Säffle 0,739 0,261 0,165 5434 4 Dingtuna 0,523 0,477 0,277 11868 3 Eskilstuna 0,646 0,354 0,215 7273 5 Segmon 0,829 0,171 0,074 1984 4 Värmlandsbro 0,676 0,324 0,132 4140 4 Kila 0,848 0,151 0,075 848 4 VTI notat 15-1995
15
Genomsnittsmátten har använts i analyserna. I bilaga 4 finns motsvarande tabell men med data för en mätdag i juli 1989, 1990
och 1991.
5.2 Prediktionsmodeller
Avsikten var att analysera om trafiksituationsmátt kan ersätta de konventionella vägbeskrivningsvariablerna för att prediktera olyckskvoten (Y).
Två olika regressionsmodeller har jämförts, modell A och modell B. Modellerna var följande:
- Modell A var en enkel linjär regressionsmodell, med andel fordon i trafiksituation som förklaringsvariabel.
Y = a + Bl*situation + 8
- Modell B var en multipel linjär regressionsmodell, med väg-typsvariablerna vägbredd, flöde, hastighetsnivá, hastighets-begränsning samt en (0,1)-variabel för motortrafikled som för-klaringsvariabler.
Y = a + Bl*vägbredd + Bz*flöde + B3*hastnivä +
B4*hbg + Bs*ml + 8
I båda modellerna har beroende variabeln (Y) varit olyckskvot. Genom att beräkna förklaringsgraden, R2, erhålls ett grovt mätt på vilken modell som förklarar mest av den ursprungliga
varian-sen i Y.
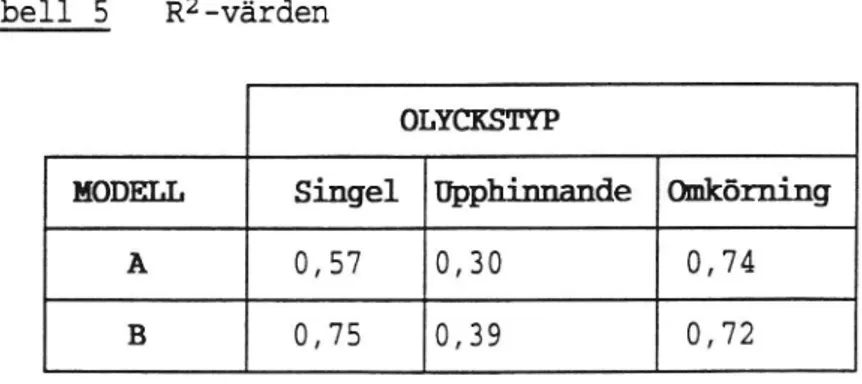
I tabell 5 visas Rz-värden för de olika olyckstyperna. Tabell 5 RZ-Värden
OLYCKSTYP
MODELL Singel Upphinnande Omkörning
A. 0,57 0,30 0,74
B 0,75 0,39 0,72
16
Om modellernas Rz-värden jämförs så har modell A lägre Rz-värde för singelolyckorna och upphinnandeolyckorna men ett något större värde för omkörningsolyckorna. Skillnaderna är dock smá. Samtliga regressioner, utom för upphinnandeolyckornas modellB, är signifikanta på 5 % (risk)nivá. Med 5 % (risk)nivá menas att det i 5 % av fallen finns en risk att påstå att det finns ett linjärt samband trots att det inte finns. Studier av s k t-värden är ett sätt att avgöra om variablernas regressions-värden (B-regressions-värden) är signifikant skilda från noll. T-regressions-värdena för variablerna i modell A är signifikanta på 5 % nivá. Ingen av t-värdena för variablerna i modell B är signifikanta på 5 %
nivá.
Avvikelsen mellan det skattade värdet och det sanna värdet kallas residual. En bild med residualerna pá x-axeln och det skattade värdet på y-axeln är en form av residualanalys. Om modellerna är rimliga ska residualerna vara slumpmässigtspridda kring noll. Residualanalyserna för modellerna med upphinnande-respektive omkörningsolyckor var utan anmärkning. För singel-olyckor finns en tendens till systematisk avvikelse, vilket kan bero på saknad av förklaringsvariabler i modellen.
Vilken av modell A och modell B som ska användas är mest en
fråga om vilka variabler som är enklast att mäta och att tolka. De fullständiga regressionsanalyserna finns i bilaga 5.
Regressioner har även genomförts dá olyckskvoten för upp-hinnande- och omkörningsolyckor adderades och relaterades till trafiksituationsmátten hindrad trafik respektive hindrad trafik exklusive de i kö. Liksom tidigare är det inte någon större skillnad mellan modell A och modell B. Förklaringsgraderna, R2, är ungefär som för omkörningsolyckorna. Trafiksituationsmattet andel hindrade är ett något sämre matt än andel hindrade ex-klusive de i kö för att förklara olyckskvoten.
17
5.3 'Vilka variabler predikterar olyckskvoten bäst?
I den följande analysen behandlas trafiksituationsmåttet till-sammans med vägtypsvariablerna. Valet av vilken eller vilka variabler som predikterar olyckskvoten bäst görs enklast med en stegvis regression. I en stegvis regression konkurrerar alla in-gående variabler på lika villkor, se referens 3, 4. Variablerna prövas och väljs in i modellen en efter en, i storleksordning med avseende på korrelationen med Y=olyckskvoten. De variabler som har en betydande effekt för att förklara Y stannar i modellen. I förhand är det möjligt att bestämma hur stor en effekt ska vara för att den ska vara betydande.
En stegvis regression för varje olyckstyp harutförts. F-värden studerades, vilka används för att testa nollhypotesen, dvs att ingen av de förklarande variablerna har någon effekt på Y. Kravet för att en variabel ska ingå i modellen är att F-värdet i modellen är signifikant på 15 % nivån, dvs risken är 15 % att säga att det fanns ett linjärt samband när det inte gjorde det. Detsamma gällde för att en variabel skulle få stanna i modellen. De fullständiga stegvisa regressionsanalyserna kan ses i bilaga 6.
Resultatet av de stegvisa regressionerna är följande: Singelolyckor
0,3875 - 0,0213*Vägbredd
R: n
36,12 R2 = 0,69 t-värde för vägbredd = -6,01
rg II
Den betydande variabeln för att förklara singelolyckskvoten är vägbredd, vilken anges i meter. Regressionen är signifikant på
5 % nivå och ca 70 % av variationen i Y förklaras av modellen.
18 Upphinnandeolyckor 0,03589 + 0,04575*situation - 0,00033*hastighetsnivá .< 1 Il F = 5,11 R2 = 0,40 t-värde för (trafik)situation = 3,077 t-värde för hastighetsnivá = -1,598
De betydande variablerna för att förklara
upphinnandeolycks-kvoten är trafiksituationsmáttet samt hastighetsnivá. Regressionen är signifikant på 5 % nivå och ca 40 % av varia-tionen i Y förklaras av modellen.
Omkörningsolyckor 0,0105 + 0,1484*situation K: II 45,90 R2 = 0,74 t-Värde för (trafik)situation = 6,77 'Ti l II
Den enda variabeln av vikt för att förklara omkörningsolycks-kvoten är trafiksituationsmáttet. Regression är signifikant på 5 % nivå och 74 % av variationen i olyckskvoten förklaras av
modellen.
Stegvis regression utfördes även för olyckskvoten då upp-hinnande- och omkörningsolyckor hade adderats. Resultaten är ungefär som för omkörningsolyckorna. Förklaringsgraden för modellen dá andel hindrade exklusive de i kö användes som trafiksituationsmátt var 0,66 medan det i modellen med andel hindrade som trafiksituationsmátt var 0,57, dvs en något större del av variationen i olyckskvoten förklarades av modellen där de
i kö hade exkluderats frán trafiksituationsmáttet.
19
6 SLUTSATS OCH FORTSATT ARBETE
En möjlig skattning av variabeln antal olyckssituationer på en väg är antal fordon i trafiksituationer som kan ha föregått olyckssituationerna. I analysen krävdes det att olika vägtyper, definierade med hjälp av hastighetsbegränsning, vägbredd och flöde uppvisade olika andel fordon i olika trafiksituationer. En utvald trafiksituation, andel fordon i kö, studerades och resul-taten visade att andelen i kö varierade mellan vägtyperna. Tidi-gare forskningsresultat, se referens 5, har visat att olycks-kvoten varierar beroende av vägtyp. Olyckskvoternas och trafik-situationernas variation beroende av vägtyp gjorde det möjligt att studera om det även fanns ett samband mellan olyckskvoter och relevanta trafiksituationer baserade på verkliga mätningar i
trafiken.
Målet med den forsatta analysen var att besvara två frågor. Den första frågan var att ta reda på om trafiksituationsmåtten kan ersätta vägtypsvariabler typ hastighetsbegränsning, vägbredd, flöde osv för att beskriva olyckskvoten för olika olyckstyper. Två linjära regressionsmodeller jämfördes. Den ena innehöll endast trafiksituationsmåttet som förklaringsvariabel (modell A) och den andra hastighetsbegränsning, vägbredd, trafikflöde, hastighetsnivå samt en variabel för om det var motortrafikled eller inte (modell B). Modellernas förklaringsvärde jämfördes. Modell B hade något större förklaringsgrad än modell A för olyckstyperna upphinnande och omkörning medan förklaringsgraden för olyckstypen singelolyckor var något större i modell A än i modell B. I stort var skillnaderna mellan modellerna små och valet av modell är mest en fråga om vilka variabler som är
enklast att mäta och att tolka.
Den andra frågan var att se vilka variabler som förklarade olyckskvoten bäst. En stegvis regression gjordes, där alla variabler från modell A och modell B ingick. På så vis kon-kurrerade alla förklaringsvariabler med varandra på lika vill-kor. För varje olyckstyp utfördes en regression. Resultaten visade att olyckskvoten för singelolyckorna predikterades bäst
20
med enbart vägbredd. Olyckskvoten för upphinnandeolyckorna predikterades bäst med trafiksituationsmättet och hastighetsnivä medan olyckskvoten för omkörningsolyckorna predikterades bäst
med endast trafiksituationsmáttet.
En möjlig brist i arbetet har varit att trafiksituationsmátten för en mätplats har jämförts med relevant olyckskvot för hela den vägtypen som mätplatsen tillhör. Att anse att en eller ett par mätplatser på en viss vägsträcka ska kunna representera en hel vägtyp är troligen inte rimligt och det bör undersökas noggrannt i vilken man de valda mätplatserna är representativa för vägtypen.
Ytterligare ett fortsatt arbete vore att analysera data timme för timme. Ett annat förslag är att använda VTIs trafiksimule-ringsmodell för att beräkna trafiksituationsmátten, se VTI notat TIO. Ytterligare studier av simuleringsmodellens möjligheter att generera lämpliga data bör göras.
Att kartlägga hur stor effekten på olyckskvoten blir av en för-ändring av enskilda.förklaringsvariabler är intressant, t ex att beskriva hur singelolyckskvoten förändras när andelen fria fordon ändras, förutsatt att effekten av andra variabler hälls under kontroll, se bilaga 9. Definitionen av olika trafiksitua-tionsmätt kan vara ett ämne för fortsatt arbete. Hur påverkas sambanden med olyckskvoterna om trafiksituationerna definieras på ett annat sätt?
21
7 REFERENSER
l Nilsson, G, Cedersund, H-Å och Sjöström, O:
Hastig-hetsmâtningssystem för att belysa trafiksäkerhets-åtgärder. Utkast. Statens Väg- och Trafikinstitut, Linköping. 1990.
2 Salomon: Involvement rate by variation from the mean
traffic speed. 1964.
3 Kleinbaum, Kupper och Muller: Applied Regression Analysis and Other Hultivariable MEthods.
4 Draper och Smith: Applied Regression.Analysis. 1966 (John Wiley and Sons, Inc.)
5 Björketun, U: KAANeprojektet. Analys av trafiksäker-het pá statliga vågar. Statens Vägverk och Statens Väg- och Trafikinstitut, Linköping. 1991.
BILAGA 1 Sid 1 (3)
Andel fordon i kö i förhållande till flödet
Andel fordon i kö i förhållande till flödet för vägar med hastighetsbegränsning 70 km/h. Data är för en dag i juli 1991.
Andel fordon i kö i
förhållande till flöde hg=70 km/h 7. FORDON I KÖ 50'_ 1. 401 i 30-_ 4' 1' '+-1 * 1 20*
i
n *i *
4= g x * a* n i + t*n 2:** 3 + g 3 3 - Iåç -'-;i A 'åt-* :I x * II 'Ä :a *2, :1+ X A X n : 0-* 1-.: *A + XA : N i' Ä äm- .â A A X:
*1%
O_ 7 1 I O 100 200 300 FLÖDEPLATS * * >' Loftahammar A A 13- Vik X X 3* Trehörna 3 = 3 Ovedskloster * * 4 Backamo
Någon skillnad mellan mätplatserna var svar att se.
BILAGA 1 Sid 2 (3)
Andel fordon i kö i förhållande till flöde för vägar med hastighetsbegränsningen 90 km/h. Data är för en dag i juli 1991.
Andel fordon i kö i
förhållande till flöde
hg=90 km/h '/. FORDON I KÖ 50-' + + + :+ + +
40-
+ +
+ + .+-i C] 5 + 30 4; A + . D B + A A D 0 + A *A :l: X Cl + A.: :i: * x : DA * W 20 B + D GA* X)< x A A éx :0: EU B + :x ?xx :t * 3D D
5-
Åk
3
D * + A i * 11 :x .; x X 10: A t =* n å 9? n AX 3 A limma? +11 *3 Xsaw * X
'i 0 7 I Y 7 1 I I I I 1 0 100 200 300 400 500 600 700 800 900 1000 1100 FLÖDEPLATS * * * Lilla Edet A A A Lödöse X X X Linderöd *1 n 1* Kvicksund + + + Stavsiö U '3 D Tranås
Vissa mätplatser låg på en lägre respektive högre nivå, exvis hade Kvicksund, Lilla Edet och Linderöd en något lägre nivå av andelen fordon i kö än de övriga trots att hänsyn tagits till flödet. Tranås, Stavsjö och Lödöse hade konsekvent en större andel fordon i kö än de övriga. Vad skillnaderna beror på är svårt att säga, men det fanns inget gemensamt inom dessa
grupperingar vad avser vägbredd och flöde.
BILAGA 1 Sid 3 (3)
Andel fordon i kö i förhållande till flödet pá vägar med hastighetsbegränsningen 110 km/h. Data är för en dag i juli
1991. Andelfordon ikö i förhållande till flöde, hg=110 km/h Z FORDON I KO 501 405
sof
1 x 3 * * 3* =** 1 XX X :l: ** 4 X X 201 % x * x X* chgz §3* * x: . ;K * A 1 3: *X * X 10: AÃA M A AA Ã?ngå
Z 3* A I A i n 0" , . , 0 1000 2000 3000 FLÖDEPLATS * * * Jönáker A A A Säffle X X X Dinatuna 3* n *3 Eskilstuna
Säffle och Jönáker har ett annat förhållande mellan andel fordon i kö och flöde än Dingtuna och Eskilstuna. Det beror på att de till skillnad från Dingtuna och Eskilstuna var 13-metersvägar och inte motortrafikleder. Resultatet var vad som kunde för-väntas.
BILAGA 2 Sid 1 (3) Förändring i köandel under dygnets timmar
Andel fordon i kö klockan 07.00-21.00, på Vägar med hastighets-begränsningen 70 km/h. Data är för en dag i juli 1991.
Andel fordon i kö varje timme hg=70 km/h 7. FORDON I KÖ 50j 409
:30-: 1 0 a r r : I I 1 r 1 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 KLOCKAN
PLATS *w Loftahammar Vik Trehörna
5+: Ovedskloster Backamo
Nágon entydig skillnad mellan mätplatserna var svårt att se.
BILAGA 2 Sid 2 (3)
Andel fordon i kö klockan 07.00-21.00 på vägar med hastighets-begränsningen 90 km/h. Data är för en dag i juli 1991.
Andel fordon i kö varje timme hg=90 km/h 7. FORDON I KO 501; 405
305 A v . *igår
20-'
* /
i'
: /I I i 'n i . w.- ^ . jo' ?I i J10%/
0-' . . - . . . , . T . ä 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 KLOCKANPLATS '_H Lilla Edet Lödöse Linderöd ?5-5 Kvicksund _ Stavsiö : 3 I Tranås
Om köandelen varje timme jämfördes fanns det skillnader mellan mätplatserna. Andel fordon i kö ökade klockan 07.00-12.00 för att sedan nalla sig konstant eller minska något till klockan 17 00 och därefter avta fram till klockan 21.00.
BILAGA 2 Sid 3 (3)
Andelen fordon i kö klockan 07.00-21.00 på vägar med
hastighets-begränsningen 110 km/h. Data är för en dag i juli 1991.
Andel fordon i kö varje timme hg=110 km/h '/. FORDON | KÖ 50: 405
30-:
T I år 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 KLOCKANPLATS '_H Jönáker Säffle _ Dinotuna : = = Eskilstuna
Mätplatsernas andel fordon i kö under timmarna var konsekvent olika.
BILAGA 3 Sid 1 (4)
Förändring i köandel på en matplats från år till år
Andel fordon i kö 1989-1991 på en 70-väg och med en ársdygns-trafik på 1000-2000 fordon. Data är för båda riktningarna.
Andel fordon i kö vid LoMahanvnarjuH1989 -1990 7. FORDON l KÖ 50:
405
30{
. d '4 4 . .20 -
4 4 4 1 , 1 x' 4 4 4 410 -
.'
4 *4 O:I99456789101112131415161718192021222324 KLOCKAN AR *_H 89 m 90 H* 91 l lin/h 6.0 m 000-2000 .dlSkillnaderna mellan andelen fordon i kö 1989-1991 var som mest 13 procent. Skillnaderna mellan timmarnas köandel för de olika aren var ej systematiska Vilket medförde att det var svårt att se om köandelarna beskrev samma matplats. Vad skillnaderna beror på exakt är svårt att uttala sig om.
BILAGA 3 Sid 2 (4)
Andel fordon i kö 1989-1991 på en 90-väg, 12,7 meter bred och med en ársdygns trafik på 4000-8000 fordon. Data är för båda riktningarna.
Andel fordon i kö vid
Linderöd juli 1989 - 1990 7. FORDON I KÖ 50j 40%
01,
O123456789101112131415161718192021222324 KLOCKAN AR W 89 á-å-â go x-X--X 91N in." ' -".'I 4000-6000 Id!
Skillnaderna mellan köandelarna 1989-1991 var från 0-8 procent. Skillnderna i andelen fordon i kö timme för timme de tre åren var inte större än att det var möjligt att urskilja att det var samma matplats som data beskrev.
BILAGA 3 Sid 3 (4)
Andel fordon i kö 1989-1991 på en 90-väg, 9 meter bred och med en ársdygns trafik på 8000-12000 fordon. Data är för båda riktningarna.
Andel fordon i kö vid
Stavsjö juli 1989 - 1990 7. FORDON I KÖ 50j
405
305
0 T . . T 7 . . T , 9 ;T , 1 , , , I 7 T , T , r , O123456789101112131415161718192021222324 KLOCKAN AR H-ak 89 ens-:s go X-X-X 91 U M GOOD-12000 AdSkillnaderna i köandel 1989-1991 var som mest 13 procent. Förändringen timme för timme varje år var ungefär den samma och det gick att se att data var för samma mätplats.
BILAGA 3 Sid 4 (4)
Andel fordon i kö 1989-1991 på en 110-väg, 13 meter bred och med en ársdygns trafik på 4000-8000 fordon. Data är för båda rikt-ningarna.
Andel fordon i kö vid Säffle juli 1989 - 1990 7. FORDON I KÖ 50: 405
sof
20-:
10{ 0;* T ; T T T T T T Y T T I 1 T j I T ä l 1 I . 1 I O123456789101112131415161718192021222324 KLOCKAN AR *ak-ak 89 á-A--A go X--X--X 91 DMMM4000-OOOOAGSkillnaden mellan köandelen 1989-1991 var som mest 10 procent. 1991 års köandelar avvek mest, men trots detta kunde en liknande
förändring ses, timme för timme de olika áren.
BILAGA 4 Sid 1 (3)
Olyckskvoter och andel fordon i olika trafiksituationer
Olyckskvot och andel fria fordon Singelolyckor Andel i trafik-Andel i trafik-Olyckskvot Andel i antal ol/ trafik-Mätplats
traf arb situation situation situation Juli 1989 Juli 1990 Juli 1991
Lilla Edet 0,149 0,597 0,597 0,614 Lödöse 0,086 0,605 0,608 0,607 Linderöd 0,149 0,581 0,594 0,588 Kvicksund 0,111 0,717 0,663 0,687 Stavsjö 0,137 0,454 0,405 0,394 Tranås 0,228 0,655 0,666 0,614 Loftahammar 0,308 0,784 0,776 0,793 Vik 0,235 0,920 0,930 0,918 Trehörna 0,235 0,903 0,887 0,928 Övedskloster 0,273 0,808 0,806 0,799 Backamo 0,304 0,852 0,815 0,871 Jönáker 0,105 0,516 0,487 0,495 Säffle 0,117 0,652 0,652 0,703 Dingtuna 0,105 0,562 0,471 0,507 Eskilstuna 0,196 0,611 0,592 0,598 Segmon 0,138 0,749 0,742 0,808 Värmlandsbro 0,135 0,573 0,584 0,677 Kila 0,304 0,903 0,884 0,899 VTI notat 15-1995
BILAGA 4 Sid 2 (3) Olyckskvot och andel hindrade fordon Upphinnandeolyckor
Mâtplats Olyckskvot Andel i Andel i Andel i antal ol/ trafik- trafik- trafik-traf arb situation situation situation
Juli 1989 Juli 1990 Juli 1991
Lilla Edet 0,031 0,403 0,403 0,386 Lödöse 0,020 0,395 0,392 0,393 Linderöd 0,031 0,419 0,406 0,412 Kvicksund 0,011 0,283 0,337 0,313 Stavsjö 0,017 0,546 0,595 0,606 Tranås 0,026 0,345 0,334 0,386 Loftahammar 0,016 0,216 0,224 0,207 Vik 0,010 0,080 0,070 0,082 Trehörna 0,010 0,097 0,113 0,072 Övedskloster 0,024 0,192 0,194 0,201 Backamo 0,016 0,148 0,185 0,129 Jönáker 0,024 0,484 0,513 0,505 Säffle 0,015 0,348 0,348 0,297 Dingtuna 0,024 0,438 0,529 0,493 Eskilstuna 0,009 0,389 0,408 0,402 Segmon 0,010 0,251 0,258 0,192 Värmlandsbro 0,017 0,427 0,416 0,323 Kila 0,010 0,097 0,116 0,101 VTI notat 15-1995
BILAGA 4 Sid 3 (3)
Olyckskvot och andel fordon som ligger i omkörningssituation samt de som just blivit omkörda.
Omkörningsolyckor
Båtplats Olyckskvot Andel i Andel i Andel i antal 01/ trafik- trafik-
trafik-traf arb situation situation situation
Ju1i 1989 Juli 1990 Juli 1991 Lilla Edet 0,043 _0,196 0,193 0,193 Lödöse 0,020 0,159 0,169 0,175 Linderöd 0,043 0,209 0,217 0,228 Kvicksund 0,028 0,148 0,177 0,180 Stavsjö 0,034 0,206 0,228 0,237 Tranás 0,042 0,148 0,141 0,154 Loftahammar 0,026 0,069 0,077 0,066 Vik 0,015 0,039 0,035 0,035 Trehörna 0,015 0,051 0,047 0,036 Övedskloster 0,030 0,070 0,088 0,083 Backamo 0,013 0,047 0,057 0,046 Jönáker 0,053 0,261 0,281 0,318 Säffle 0,042 0,197 0,214 0,205 Dingtuna 0,053 0,241 0,292 0,304 Eskilstuna 0,046 0,223 0,241 0,254 Segmon 0,016 0,101 0,108 0,087 Värmlandsbro 0,029 0,166 0,156 0,147 Kila 0,013 0,037 0,025 0,021 VTI notat 15-1995
BILAGA 5 Sid 1 (3) Regressioner från kapitel 5.2 Singelolyckor Modell A Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of Mean
Source DF Squares Square F Value Prob>F
Model 1 0.05748 0.05748 21.395 0.0003
Error 16 0.04298 0.00269
C Total 17 0.10046
Root MSE 0.05183 R-square 0.5721
Dep MEan 0.18417 Adj R-sq 0.5454
C.V. 28.14347
Parameter Estimates
Parameter Standard T for H0:
Variable DF Estimate Error Parameter=0 Prob > ÖTÖ
INTERCEP 1 -0.113395 0.06548127 -1.732 0.1026
SITUAT 1 0.412802 0.08924609 4.625 0.0003
Singelolyckor
Modell B Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of Mean
Source DF Squares Square F Value Prob>F
Model 5 0.07549 0.01510 7.258 0.0024
Error 12 0.02496 0.00208
C Total 17 0.10046
Root MSE 0.04561 R-square 0.7515
Dep Mean 0.18417 Adj R-sq 0.6479
C.V. 24.76636
Parameter Estimates
Parameter Standard T for HO:
Variable DF Estimate Error Parameter=0 Prob > ÖTÖ
INTERCEP 1 0.597238 0.19497955 3.063 0.0098 FLODE 1 -0.000007989 0.00000615 -1.299 0.2184 HBG 1 0.001126 0.00234542 0.480 0.6399 HASTNIVA 1 -0.004558 0.00394177 -1.156 0.2700 VBREDD 1 -0.005989 0.01048536 -O.571 0.5784 ML 1 0.038010 0.04730142 0.804 0.4373 VTI notat 15-1995
BILAGA 5 Sid 2 (3) Upphinnandeolyckor
Modell A
Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of Mean
Source DF Squares Square F Value
Model 1 0.00028 0.00028 6.983
Error 16 0.00064 0.00004
C Total 17 0.00092
Root MSE 0.00632 R-square 0.3038
Dep Mean 0.01783 Adj R-sq 0.2603
C.V. 35.44868
Parameter Estimates
Parameter Standard T for H0: Variable DF Estimate Error Parameter=0
INTERCEP 1 0.009809 0.00338233 2.900
SITUAT 1 0.028743 0.01087680 2.643
Upphinnandeolyckor Modell B
Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of Mean
Source DF Squares Square F Value
Model 5 0.00036 0.00007 1.513
Error 12 0.00056 0.00005
C Total 17 0.00092
Root MSE 0.00685 R-square 0.3867
Dep Mean 0.01783 Adj R-sq 0.1311
C.V. 38.42083
Parameter Estimates
Parameter Standard T for H0: Variable DF Estimate Error Parameter=0
INTERCEP 1 0.052875 0.02928971 1.805 FLODE l 0.000001522 0.00000092 1.648 HBG 1 -0.000013914 0.00035233 -0.039 HASTNIVA 1 -0.000521 0.00059213 -0.880 VBREDD 1 0.000646 0.00157510 0.410 ML 1 0.002529 0.00710559 0.356 VTI notat 15-1995 Prob>F 0.0177 Prob > ÖTÖ 0. 0.01040177 Prob>F 0.2573 Prob > öTÖ 0 0 0 0 0 0.0962 .1253 .9691 .3961 .6889 .7281
BILAGA 5 Sid 3 (3) Omkörningsolyckor
Modell A
Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of .Mean
Source DF Squares Square F Value Prob>F
Model 1 0.00243 0.00243 45.898 0.0001
Error 16 0.00085 0.00005
C Tctal 17 0.00328
Root MSE 0.00728 R-square 0.7415
Dep Mean 0.03117 Adj R-sq 0.7254
C.V. 23.34405
Parameter Estimates
Parameter Standard T før H0:
Variable DF Estimate Error Parameter=0 Prcb > ÖTÖ
INTERCEP 1 0.010479 0.00350214 2.992 0.0086
SITUAT l 0.148355 0.02189802 6.775 0.0001
Omkörningsolyckor Modell B
Model: MODELl
Dependent Variable: OLKVOT Analysis of Variance
Sum of Mean
Søurce DF Squares Square F Value Prob>F
Medel 5 0.00236 0.00047 6.162 0.0047
Error 12 0.00092 0.00008
C Total 17 0.00328
Root.MSE 0.00875 R-square 0.7197
Dep Mean 0.03117 Adj R-sq 0.6029
C.V. 28.07051
Parameter Estimates
Parameter Standard T for H0:
Variable DF Estimate Error Parameter=0 Prob > öTö
INTERCEP l 0.004269 0.03739870 0.114 0.9110 FLODE 1 0.000001089 0.00000118 0.923 0.3740 HBG 1 0.000685 0.00044987 1.524 0.1535 HASTNIVA l -0.000456 0.00075606 -0.604 0.5574 VBREDD l 0.000265 0.00201118 0.132 0.8974 ML 1 0.006165 0.00907281 0.679 0.5097 VTI notat 15-1995
BILAGA 6 Sid 1 (3) Stegvisa regressioner från kapitel 5.3 Singelolyckcr
Stegvis regression
OLTYP=1 Singelolyckor
Stepwise Procedure for Dependent Variable OLKVOT
Step 1 Variable VBREDD Entered R-square = 0.69302961 C(p) = -0.07898842
DF Sum of Squares Mean Square F
Prob>F
Regression 1 0.06962072 0.06962072 36.12
0.0001
Error 16 0.03083778 0.00192736
Total 17 0.10045850
Parameter Standard Type II
Variable Estimate Error' Sum of Squares F
Prob>F
INTERCEP 0.38750967 0.03538012 0.23121157 119.96 0.0001
VBREDD -0.02130485 0.00354479 0.06962072 36.12
0.0001
Bounds on ccndition number: 1, 1
All variables left in the model are significant at the 0.1500 level. No other variable met the 0.1500 significance level for entry into the
model.
Summary of Stepwise Procedure for Dependent Variable OLKVOT
Variable Number Partial Model
Step Entered Removed In R**2 R**2 C(p) F
Prob>F
1 VBREDD 1 0.6930 0.6930 -0.079O 36.1223
0.0001
BILAGA 6 Sid 2 (3) Upphinnandeolyckor
Stegvis regression
OLTYP=2 Upphinnandeolyckor
Stepwise Procedure for Dependent Variable OLKVOT
Step 1 Variable SITUAT Entered R-square = 0.30384473 C(p) 0.51329733
DF Sum of Squares Mean Square F
Prob>F
Regression 1 0.00027908 0.00027908 6.98
0.0177
Error 16 0.00063942 0.00003996
Total 17 0.00091850
Parameter Standard Type II
Variable Estimate Error Sum of Squares F
Prob>F
INTERCEP 0.00980921 0.00338233 0.00033612 8.41
0.0104
-SITUAT 0.02874313 0.01087680 0.00027908 6.98 0.0177
Bounds on condition number: 1, 1
Step 2 Variable HASTNIVA Entered R-square = 0.40511893 C(p) 0.40195427
DF Sum of Squares Mean Square F
Prob>F
Regression 2 0.00037210 0.00018605 5.11
0.0203
Error 15 0.00054640 0.00003643
Total 17 0.00091850
Parameter Standard Type II
Variable Estimate Error Sum of Squares F
Prob>F INTERCEP 0.03589515 0.01664033 0.00016950 4.65 0.0476 SITUAT 0.04574947 0.01486910 0.00034484 9.47 0.0077 HASTNIVA -0.00033549 0.00020994 0.00009302 2.55 0.1309
-Bounds on condition number: 2.050284, 8.201137
A11 variables left in the model are significant at the 0.1500 level. No other variable met the 0.1500 significance level for entry into the model.
Summary of Stepwise Procedure for Dependent Variable OLKVOT Variable Number Partial Model
Step Entered Removed In R**2 R**2 C(p) F
Prob>F 1 SITUAT l 0.3038 0.3038 0.5133 6.9834 0.0177 2 HASTNIVA 2 0.1013 0.4051 0.4020 2.5536 0.1309 VTI notat 15-1995
BILAGA 6 Sid 3 (3) Omkörningsolyckor
Stegvis regression
OLTYP=3 Omkörningsolyckor
Stepwise Procedure for Dependent Variable OLKVOT
Step 1 Variable SITUAT Entered R-square = 0.74151038 C(p) = 0.39249526
DF Sum of Squares Mean Square F
Prob>F
Regression l 0.00242956 0.00242956 45.90
0.0001
Error 16 0.00084694 0.00005293
Total 17 0.00327650
Parameter Standard Type II
Variable Estimate Error Sum of Squares F
Prob>F
INTERCEP 0.01047940 0.00350214 0.00047396 8.95
0.0086
SITUAT 0.14835490 0.02189802 0.00242956 45.90
0.0001
Bounds on condition number: 1, 1
All variables left in the model are significant at the 0.1500 level. No other variable met the 0.1500 significance level for entry into the model.
Summary of Stepwise Procedure for Dependent Variable OLKVOT
Variable Number Partial Model
Step Entered Removed In R**2 R**2 C(p) F
Prob>F
1 SITUAT 1 0.7415 0.7415 0.3925 45.8980
0.0001
VTI notat 15-1995 lT he SA S Sys te m OLTY P-l S i n g e l o lyc k o r C o r r e lat i o n An al ys is P e a r so n C o r r e l a t i o n C o e f f i c i e n t s / P r o b > öR ö un d e r H o : R h o -O / N -18 O L K V O T S I T UA T F L O D E H B G H A S TN I V A V B R E D D M L O L K V OT 1 . 0 0 0 0 0 0 . 0 0 . 75 6 3 9 0 . 00 0 3 -0 .7 7231 0. 00 02 -0 .7 74 57 0. 00 02 -0 .8 13 97 0. 00 01 -0 .8 32 48 0. 00 01 -0 .3 74 66 0. 12 56 S I T U AT 0. 75 63 9 0. 00 03 1.00 00 0 0. 0 -O .9 5827 0. 0001 -O .7 6284 0. 00 02 -0 .715 59 0. 00 08 -0 .7 63 88 0. 00 02 -O .4 68 35 0. 05 00 F L O DE -0 . 7 7 2 3 1 0 . 0 0 0 2 -0 . 95 8 2 7 0 . 00 0 1 1. 00 00 0 0. 0 0. 80 091 0. 0001 0.77 08 3 0. 00 02 0. 82 44 6 0. 00 01 0. 60 19 6 0. 00 82 H B G -0 .7 74 57 0. 00 02 -O. 7 6 2 8 4 0 . 00 0 2 0. 8009 1 0.00 01 1.00 00 0 0.0 0.94 32 4 0. 00 01 0. 87 76 6 0. 00 01 0. 53 30 0 0. 02 28 H A S T N I V A -0 . 8 1 39 7 0 . 0 0 01 -0 . 7 1 5 5 9 0 . 0 0 0 8 0.77 08 3 0. 00 02 0. 94 32 4 0.00 01 1. 00 00 0 0. 0 0. 90 010 0. 0001 0.53 36 4 0.02 26 V B R E D D -0 .8 3 2 4 8 0 . 00 0 1 -0 . 7 6 3 8 8 0 . 0 0 0 2 0 . 8 2 4 4 6 0 . 0 0 0 1 0 . 8 7 7 6 6 0 . 0 0 0 1 0. 90 010 0. 0001 1. 0 0 0 0 0 0 .0 0. 41 85 2 0. 08 39 Singelolyckor Korrelationer M L -0 . 3 7 4 6 6 0 . 1 2 5 6 -O . 4 6 83 5 0 . 0 5 0 0 0 . 6 0 1 9 6 0 . 0 0 8 2 0. 53 300 0. 02 28 0. 53 36 4 0. 02 26 0. 41 85 2 0. 08 39 1 . 0 0 0 0 0 0 . 0 Korrelationer BILAGA 7 Sid 1
VTI notat 15-1995 T h e S A S S ys t e m OL TY P-Z U p p h i n n a n d e o l yc k o r C o r r e l a t i o n Anal ys is P e a r s o n C o r r e la t i o n C o e f f i c i e n t s / P r o b > öR ö un d e r H o : R h o -O / N -18 O L K V OT S I T UA T F L O D E H B G H A S TN I V Ä V B R E D D M L O L K V O T 1. 00 00 0 0. 0 0. 55 12 2 0. 01 77 0. 50 75 8 0. 03 15 0. 22 86 3 0. 36 15 0. 17 22 7 0. 4943 0. 30 08 8 0. 22 50 0. 30 52 1 0. 21 81 S I T U AT 0.55 12 2 0. 01 77 1. 00 00 0 0. 0 0. 95 80 8Å 0.00 01 0. 76 28 1 0. 00 02 0. 71 57 3 0. 00 08 0. 76 420 0.00 02 0. 46 79 9 0. 0502 F L O D E 0. 50 75 8 0. 03 15 0. 95 80 8 0.00 01 1. 00 00 0 0. 0 0. 80 09 1 0. 0001 0. 77 08 3 0. 00 02 0. 82 44 6 0. 00 01 0. 60 19 6 0. 00 82 H B G 0. 22 86 3 0. 3615 0. 76 28 1 0. 00 02 0. 80 09 1 0. 00 01 1. 00 00 0 0. 0 0. 94 32 4 0. 00 01 0. 8776 6 0. 00 01 0. 53 30 0 0.02 28 H A ST N I V A 0.17 22 7 0. 49 43 0.71 57 3 0. 00 08 0. 7708 3 0. 00 02 0. 94 32 4 0. 00 01 1. 00 00 0 0. 0 0. 90 01 0 0. 0001 0. 53 36 4 0. 02 26 V B R E D D 0. 3008 8 0. 22 50 0. 7642 0 0.00 02 0. 82 44 6 0. 00 01 0. 87 76 6 0. 00 01 0. 90 010 0. 00 01 1. 00 00 0 0. 0 0.41 85 2 0. 08 39 M L 0. 30 521 0. 21 81 0. 46 79 9 0. 0502 0. 60 19 6 0. 00 82 0. 53 30 0 0. 02 28 0. 53 364 0. 0226 0. 41 85 2 0. 08 39 1 . 0 0 0 0 0 0 . 0 Upphinnandeolyckor korrelationer BILAGA 7 Sid 2
VTI notat 15-1995 T h e S A S S ys t e m OL TY P-B O m k ör n i n g s o l yc k o r C o r r e l a t i o n An alys is P e a r s o n C o r r e l a t i o n Co e f f i c i e n t s / P r o b > öR ö un d e r H o : R h o uO / N -18 O L K V O T S I T U A T F L O D E H B G H A S T N I V Ä V B R E D D ML O L K V O T 1. 00 00 0 0. 0 0. 86 11 1 0. 00 01 0. 78 04 2 0. 00 01 0. 80 63 8 0.00 01 0. 73 76 1 0. 00 05 0. 72 65 5 0. 00 06 0 . 5 7 2 1 5 0 . 0 1 3 1 S I T U AT 0. 86 111 0. 0001 1. 00 00 0 0. 0 0. 95 75 8. 0 . 0 0 01 0. 86 32 9 0. 00 01 0. 81 74 8 0. 0001 0.87 75 2 0. 00 01 0. 57 36 2 0. 01 28 F L O D E 0. 78 04 2 0. 00 01 0. 95 75 8 0. 00 01 1. 00 00 0 0. 0 0. 80 09 1 0. 00 01 0. 77 08 3 0. 00 02 0. 82 44 6 0. 00 01 0. 6019 6 0. 00 82 H B G 0. 80 63 8 0. 00 01 0. 86 32 9 0. 00 01 0. 80 09 1 0. 00 01 1. 00 00 0 0. 0 0. 9432 4 0. 00 01 0. 87 76 6 0. 00 01 0. 53 30 0 0. 02 28 H AS T N I V A 0.73 76 1 0. 00 05 0. 81 74 8 0. 00 01 0. 77 08 3 0.00 02 0. 94 32 4 0. 00 01 1. 00 00 0 0. 0 0. 90 01 0 0. 00 01 0. 53 36 4 0. 02 26 V B R E D D 0. 72 655 0. 00 06 0.87 75 2 0. 00 01 0. 8244 6 0. 0001 0. 87 76 6 0. 00 01 0 . 9 0 0 1 0 0 . 0 0 0 1 1. 00 00 0 0. 0 0 . 4 1 8 5 2 0 . 0 8 3 9 M L 0. 57 21 5 0. 0131 0 . 5 7 3 6 2 0 . 0 1 2 8 0 . 6 0 1 96 0 . 0 0 8 2 0 . 5 3 3 0 0 0 . 0 2 2 8 0 . 5 3 3 6 4 0 . 0 2 2 6 0 . 4 18 5 2 0 . 0 8 39 1. 00 00 0 0. 0 Omkörningsolyckor Korrelationer BILAGA 7 Sid 3
BILAGA 8 Sid 1 (2) TA89 beskrivning
Universellt
trafikm'a'tningssystem
TA-89 är ett trafikmätningssystem för kvalificerad analys av
vägtrafiken i olika avsnitt.
Med TA-89 kan man samtidigt mäta olika trañkvan'abler. Man kan exempelvis få uppgift om varje fordons hastighet, körriktning, passagetidpunkt, axelavstånd, sidoläge och "typ" enligt en speciell kod baserad på fordonets axelarrangemang.
Som detektorer utnyttjas sådana typer som påverkas av fordonshjul, exempelvis gummislang. Varje gång ett hjulpar pas-serar detektorn, registreras tidpunkten för denna händelse. Denna information lagras på ett minneskort.
Apparaten kan maximalt innehålla 5 st minneskort rymmande 40 000 fordon vardera. Detta ger en maximal kapacitet på 200 000 fordon.
..
-'
.
Under måtningens gång kan även en mängd våderdata registreras såsom luft-fuktighet, vägtemperatur, quttemperatur. nederbörd mm. . l. ,I I \ _ . \ A , V '1 r . , . j . i V . " r ' 5 -< a -o -. . . :I . ' . ' , ._ -_ -l . '. >vO -I --. .. . '_ , _ A . ' ' A_ JA :i i» n ' ' '" * .« . .g ., . _ V ' 4 ' _ '-i . . i . V V . l _ -_ .v Vi ?? o .i.. . . \ . . *.40 2
När en mätning är klar förs data över till en PC för vidare databehandling. Hela utrustningen är batteridriven och särskilda konstruktionslösningar har gjorts för att minimera strömförbrukningen.
BILAGA 8
(2)
Tekniska data
Spänningsförsörjning: I2 V batteridn'ft
Strömförbrukning: < 50 mA
Gångtid utan battenbyte
-- internt batteri: 6 dagar
-- externt batteri' 70 dagar
Datalagnngskapacitet' Detektonngångar
Digitala in-/utgångar
Analoga ingångar. Analoga utgångar. Temperaturområde:Fukttålighet:
Givaravstånd (typiskt) Vikt: Mått' 200 000 fordon (2.5 Mbyte) 6 lö 8 4.400 C till +700 C
lP65 (kan ligga i vatten) 3.3 m
5,7 kg
l6 x IO x 29 cm
BILAGA 9 Sid 1 (12)
Bidrar kunskapen am antal trafiksituationer med någon information för att förklara olyckskvoten, utöver vad flödet redan gör?
INNEHÅLLSFÖRTECKNING
Sid
1
BAKGRUND, DEFINITIONER OCH DATA
1
2
RESULTAT
3
3 SLUTSATS OCH FRÅGOR 10
4
REFERENSER
BILAGA 9 Sid 2 (12)
l BAKGRUND, DEFINITIONER OCH DATA
I en tidigare studie "Integrerat mätsystem för hastighet och olycksanalys" har försök gjorts att analysera olycksrisker ba-serade pá händelser i trafiken som kan relateras till olika olyckstyper. Följande modell har legat till grund i arbetet:
Olyckor
Vägtyp
A
B
TIdIUCkOI'
Hastighetsskillnad
m m
Trafiksitu ation
UIllustrationen avser att beskriva sambandet mellan olyckor och olika situationer baserade på trafikdata (A) och hur dessa händelser (B) definieras i trafiken.
Händelserna i trafiken har skattats med ett trafiksituations-mátt, vilket har beräknats genom att fordon klassificerades i fyra grupper med avseende på tidluckor och hastighetsskillnad mellan parvisa fordon. Grupperna har kallats fria fordon, fordon i omkörningssituation, fordon i kö och fordon som just blivit omkörda. För att erhålla data om trafiksituationerna har VTI:s trafikregistreringssystem använts. Data för 18 mätpunkter, i olika vägmiljöer på det statliga vägnätet ingår. Ett genomsnitt-ligt mátt för hela 1989 har använts.
På de flesta mätplatser har tre till sju mätningar utförts för-delade över året. De har sedan ingått i beräkningen av det genomsnittliga mattet. Dagar dä halt väglag har observerats har ej ingått i analysen.
BILAGA 9 Sid 3 (12)
Olyckskvoten i analysen baseras på olyckor som har inträffat på den vägtypen som respektive mätpunkt tillhörde. Singelolyckor, upphinnandeolyckor och omkörningsolyckor som inträffat på hela det statliga vägnätet under 1988-1989 har använts. I tabell 1
redovisas data om trafiksituationerna.
Tabell 1 Genomsnittlig andel fria fordon, andel hindrade fordon, andel fordon i omkörningssituation samt just omkörda och genomsnittligt flöde 1989.
Mâtplats Andel Andel Andel i Genomsn. Antal fria hindrad omkörningssit. flöde
mät-samt just dygn
omkörda Lilla Edet 0,591 0,409 0,198 9148 5 Lödöse 0,604 0,396 0,170 8005 5 Linderöd 0,615 0,385 0,222 7122 4 Kvicksund 0,687 0,314 0,170 5515 4 Stavsjö 0,513 0,487 0,200 9612 5 Tranås 0,705 0,295 0,136 3328 6 Loftahammar 0,889 0,111 0,039 954 6 Vik 0,944 0,056 0,022 537 7 Trehörna 0,918 0,082 0,040 736 4 Övedskloster 0,829 0,171 0,078 1477 5 Backamo 0,863 0,137 0,041 1371 5 Jönáker 0,556 0,444 0,256 10796 4 Säffle 0,739 0,261 0,165 5434 4 Dingtuna 0,523 0,477 0,277 11868 3 Eskilstuna 0,646 0,354 0,215 7273 5 Segmon 0,829 0,171 0,074 1984 4 Värmlandsbro 0,676 0,324 0,132 4140 4 Kila 0,848 0,151 0,075 848 4
Vid analys av samband kan det vara svårt att avgöra om sambanden
mellan variabler är direkta eller indirekta. Kausala modeller
beskrivs enklast med pilscheman.
BILAGA 9 Sid 4 (12)
Den fullständiga modellen ser ut enligt följande:
Olyckskvot (Y) X5 Härvid beskrivs X-variablerna. VTI notat 15-1995
Andel fordon i trafiksituation
Vägbredd
Hastighetsbegränsning Hastighetsnivá
Flöde
0,1-variabel för motortrafikled eller inte
BI LAGA 9
Sid 5 (12)
2 RESULTAT
Styrkan av det linjära sambandet mellan olyckskvoten och för-klaringsvariablerna samt mellan förklaringsvariablerna beskrivs
i korrelationsmatriserna nedan:
Singelolyckor
Y
X1
X5
X3
X4
x2
X6
Olkvot Situat Flöde Hbg Hastniva Vbredd ML Y Olkvot 1,000 0,756 -0,772 -0,775 -0,814 -0,832 -0.375 X1 Situat 0,756 1,000 -0,958 -0,763 -0,716 -0,764 -0,468 X5 Flöde -0,772 -0,958 1,000 0,801 0,771 0,824 0,602 X3 Hbg -0,775 -0,763 0,801 1,000 0,943 0,878 0,533 X4 Hastniva-0,814 -0,716 0,771 0,943 1,000 0,900 0,534 X2 Vbredd -0,832 -0,764 0,824 0,878 0,900 1,000 0,418 X6 ML -0,375 -0,468 0,602 0,533 0,534 0,418 1,000 Upphinnandeclyckor
Y '
X1
X5
X3
X4
X2
X6
Olkvot Situat Flöde Hbg Hastniva Vbredd ML Y Olkvot 1,000 0,551 0,508 0,229 0,172 0,301 0,305 X1 Situat 0,551 1,000 0,958 0,763 0,716 0,764 0,468 X5 Flöde 0,508 0,958 1,000 0,801 0,771 0,824 0,602 X3 Hbg 0,229 0,763 0,801 1,000 0,943 0,878 0,533 X4 Hastniva 0,172 0,716 0,771 0,943 1,000 0,900 0,534 X2 Vbredd 0,301 0,764 0,824 0,878 0,900 1,000 0,418 X6 ML 0,305 0,468 0,602 0,533 0,534 0,419 1,000 VTI notat 15-1995
BILAGA 9 Sid 6 (12) Omkörningsolyckor
Y
X1
X3
x4
X2
X6
Olkvot Situat Flöde Hbg Hastniva Vbredd ML Y Olkvot 1,000 0,861 0,780 0,806 0,738 0,726 0,572 X1 Situat 0,861 1,000 0,958 0,863 0,817 0,877 0,574 XS Flöde 0,780 0,958 1,000 0,801 0,771 0,824 0,602 X3 Hbg 0,806 0,863 0,801 1,000 0,943 0,878 0,533 X4 Hastniva 0,738 0,817 0,771 0,943 1,000 0,900 0,534 X2 Vbredd 0,726 0,877 0,824 0,878 0,900 1,000 0,418 X6 ML 0,572 0,574 0,602 0,533 0,534 0,418 1,000
Korrelationerna mellan trafiksituationerna och flödet för de tre samband. Det är
även starka korrelationer mellan de olika förklaringsvariablerna olyckstyperna är omkring 0,95 dvs ett starkt
(multikollinaritet).
Huvudfrágan i analysen var: Bidrar andelen fordon i de olika trafiksituationerna med någon information för att förklara olyckskvoten utöver vad flödet redan gör?
Om sambandet mellan olyckskvot och trafiksituation ska analy-seras så visar den tidigare korrelationsmatrisen att
korrela-tionen mellan trafiksituation och flöde är stark och modellen ser ut så här:
Olyckskvot --- -- Trafiksituation --- -- Flöde
(Y) (X1) (X5)
BILAGA 9 Sid 7 (12)
Illustrationen avser beskriva att inverkan på olyckskvoten av trafiksituation sker genom flödet. Om endast korrelationen mellan olyckskvoten och trafiksituation beskrivs så kommer den att vara felvisande eftersom en stor del av sambandet beror på det starka sambandet mellan flöde och trafiksituation. Den par-tiella korrelationen beskriver sambandet mellan trafiksituation och olyckskvot bättre. Modellen ser dá ut enligt följnade:
Trafiksituation
lz/////
(Xl)*'\\\\\\\\\\\\\\
FlödeOlyckskvot (
(Y) (X5)
Formeln för den partiella korrelationskoefficient är;
_ *
r1,2 r1,3 r2,3
r1,2|3 =
jz
(1 ' r1,3) (1 ' r2,3)
2
där ry X:korrelationen mellan y och x I detta fall var 1=trafiksituation
2=olyckskvot 3=f1öde
Partiella korrelationerna och R2 har beräknats för var och en av
de tre olyckstyperna singel, upphinnande och omkörning där par-tialen är flöde. Data för båda riktningarna har aggregerats.
BILAGA 9 Sid 8 (12)
För att se om den partiella korrelationskoefficienten var
signi-fikant skild ifrán noll testades följande hypotes med hjälp av
ett F-test (se referens 1 och 2).
H0: = 0
Där
r21,2|3
är
partiella korrelationen
i kvadrat
dvs
förklaringsgraden.
Av definitionen för partiell korrelation följer att (se referens
1 och 2); SSE(p-1) - SSE(p)
(n-p) * r21,2|3 =
SSE(p-1)/n-p är Fl n_p om Flln_p < Fl n_p-tabell förkastas H1Partiella korrelationer beräknades;
Samband Partiell Förkl. Signif
Olyckskvot korrelation grad a=0,05
Andel fordon R R2 i trafiksit. Singelolyckor - 0,08981 0,008 Nej Fria fordon Upphinnandeolyckor - 0,26297 0,069 Nej Omkörning, kö, omkörda Omkörningsolyckor - 0,63156 0,399 Ja
Omkörning och omkörda
Resultaten visar att det finns ett linjärt samband mellan om-körningsolyckor och andelen fordon som befann sig i en omkör-ningssituation eller blivit omkörda. För singelolyckor och upp-hinnandeolyckor fanns inga linjära samband.
BILAGA 9 Sid 9 (12)
Sammanfattningsvis gäller att för omkörningsolyckor sá bidrar trafiksituationsmáttet med information utöver vad flödet gör för att förklara olyckskvoten. Detta gäller inte för singelolyckor och upphinnandeolyckor.
Korrelationsmatriserna för olyckstyperna ser annorlunda ut när
effekten av flödet tas bort dvs när den partiella korrelationen beräknas och partialen är flöde. Olyckskvoten och trafiksitua-tionsmátten är normerade med flödet eftersom flödet finns med i nämnaren i båda måtten, trots det så finns det höga korrela-tioner kvar mellan de flesta variabler och flödet. I de par-tiella korrelationsmatriserna där effekten av flödet tagits bort kan vi se att de höga korrelationerna mellan
förklaringsvariab-lerna har försvunnit.
BILAGA 9 Sid 10 (12) Singelolyckor
The SAS System OLTYP-l Singloolyckor Correlstion Analysis
l 'PARTIAL' Variables: FLÖDE
6 'VÅR' Variables: OLKVOT SITUAT HBG HASTNIVA VBREDD ML
Pearson Psrtial Correlstion Coefficients / Prob > öRö under 80: Partial Rhc-O / N - 18
OLKVOT SITUAT HBG HASTNIVA VBREDD ML
OLKVOT 1.00000 0.08981 -0.41016 -0.54031 -0.54449 0.17789 0.0 0.7318 0.1020 0.0251 0.0238 0.4946 SITUAT 0.08981 1.00000 0.02718 0.12674 0.16181 0.47530 0.7318 0.0 0.9175 0.6279 0.5350 0.0538 HBG -O.41016 0.02718 1.00000 0.85431 0.64138 0.10642 0.1020 0.9175 0.0 0.0001 0.0055 0.6844 HASTNIVA -0.54031 0.12674 0.85431 1.00000 0.73389 0.13688 0.0251 0.6279 0.0001 0.0 0.0008 0.6004
VBREDD -O.54449 0.16181 0.64138 0.73389 1.00000 -O.17210
0.0238 0.5350 0.0055 0.0008 0.0 0.5089
ML 0.17789 0.47530 0.10642 0.13688 -0.17210 1.00000
0.4946 0.0538 0.6844 0.6004 0.5089 0.0
Upphlnnandeolyckor
The SAS System
OLTYP-Z Upphinnandeolyckor Corrolation Analysis
1 'PARTIAL' Variables: F.ODE
6 'VÅR' Variablos: C.KVOT SITUAT HBG EASTNIVÃ VBREDD ML
Pearson Partial Correlation Coefficients / Prob > öRö under Ho: Partisl Rho-O / N - 18
OLKVOT SITUAT HBG HASTNIVA VBREDD ML
OLKVOT 1.00000 0.26297 -0.34483 -O.39898 -0.24120 -0.00048 0.0 0.3078 0.1753 0.1126 0.3510 0.9985 SITUAT 0.26297 1.00000 -0.02643 -0.12491 -0.15852 -O.47S32 0.3078 0.0 0.9198 0.6329 0.5434 0.0538 HBG -O.34483 -0.02643 1.00000 0.85431 0.64138 0.10642 0.1753 0.9198 0.0 0.0001 0.0055 0.6844 HASTNIVA -0.39898 -0.12491 0.85431 1.00000 0.73389 0.13688 0.1126 0.6329 0.0001 0.0 0.0008 0.6004 VBREDD -O.24120 -0.15852 0.64138 0.73389 1.00000 -0.l7210 0.3510 0.5434 0.0055 0.0008 0.0 0.5089 ML -0.00048 -0.47532 0.10642 0.13688 -O.17210 1.00000 0.9985 0.0538 0.6844 0.6004 0.5089 0.0 notat 15-1995
BILAGA 9 Sid 11 (12) Omkörningsolyckor
The SAS System
OLTYP-B Omkörninqsolyckor Correlatioa Analysis
l 'PARTIAL' Variables: FLÖDE
6 'VAR' Variables: OLKVOT SITUAT HBG HASTNIVÅ VBREDD ML
Pearson Partial Corrolation Coefficient: / Prob > öRö under 80: Partial Rho-O / N - 18
OLKVOT SITUAT HBG HASTNIVÅ VBREDD ML
OLKVOT 1.00000 0.63156 0.48434 0.34153 0.23492 0.20502 0.0 0.0065 0.0488 0.1797 0.3641 0.4299 SITUAT 0.63156 1.00000 0.55840 0.43226 0.53980 -0.01220 0.0065 0.0 0.0198 0.0831 0.0253 0.9629 HBG 0.48434 0.55840 1.00000 0.85431 0.64138 0.10642 0.0488 0.0198 0.0 0.0001 0.0055 0.6844 HASTNIVÄ 0.34153 0.43226 0.85431 1.00000 0.73389 0.13688 0.1797 0.0831 0.0001 0.0 0.0008 0.6004 VBREDD 0.23492 0.53980 0.64138 0.73389 1.00000 -0.17210 0.3641 0.0253 0.0055 0.0008 0.0 0.5089 ML 0.20502 -0.01220 0.10642 0.13688 -0.17210 1.00000 0.4299 0.9629 0.6844 0.6004 0.5089 0.0
Om partialen ändras dvs om effekten av andra variabler än flödet tas bort tex vägbredd så finns det fortfarande höga korrelationer kvar i materialet. Vilket tyder på att flödet är den variabel som ska vara partialen.
Styrkan av det linjära sambandet mellan andra kombinationer av olyckskvoter och andel fordon i olika trafiksituationer har studerats. Olyckskvoterna för olyckstyperna upphinnandeolyckor och omkörningsolyckor adderades och korrelationen med all hindrad trafik dvs fordon i omkörning, kö samt just omkörda studerades. Sambandet mellan den kombinerade olyckskvoten och andel fordon i omkörning samt just omkörda beräknades också. De partiella korrelationerna var 0,17073 respektive 0,49114. Ingen av dessa var signifikanta på 5 %-nivá och något linjärt samband
kan uteslutas.