25
S
PR T
Nr 203 - 1980
Statens väg- och trafikinstitut (VTI) - 581 01 linköping
ISSN 0347-6030 National Road & Traffic Research Institute - 5-581 01 Linköping - Sweden
Trafiksäkerhet vid avkörning
i vägens sidoutrymme
Utvärdering av olika
sidoutrymmes-sektioner genom simulering i dator
av Rein Schandersson
U U L J O U O U O U U UO U O U U U U O . . O . . 4: ' -t ' 4: -' 4: ' 4: -' 4: -' -E ' I 4: -' t 4: -' -t ' . t 4: -' 1: ' 4: ' t o o o o 0 0 o 0 0 o .1 2' 0 4:: 0 O O l \ ) f \ . ) l \ )l\ ) N N N N N N N -å O N U ' I L ' U Q N Q REFERAT ABSTRACT SAMMANFATTNING SUMMARY BAKGRUND MÅLSÄTTNING METOD
OMFATTNING, GENOMFÖRANDE, PROGRAMVARA OCH PARAMETERVÄRDEN Sektionstyper Jordskärningar Bergskärningar Banksektioner Datorprogram
Användningsområden och begränsningar Indata
Utdata
Val av prOgramversion och parametervärden Programversion
Värden på ingångSparametrar
Data för kontroll av simuleringen Fordonsdata
Däcksdata
Fordonskontroll Terrängdata
Initialvärden för fordonet vid simuleringens början
Tolkning och val av utdata vid utvärderingen VTI RAPPORT 203 II O K O O U W U ' I 13 16 18 20 20 21 21 21
23
22 22 23 25U' l U ' l U ' l U ' i U T U ' I U l U l U T N R . ) U U U L ) ( N LU U U U U M M A . : RESULTAT Jordskärningar
Beskrivning av fordonsrörelser vid simuleringarna
Tabellsammanställning - jordskärningar
Slutsatser
Bergskärningar
Beskrivning av fordonsrörelser vid simuleringarna
Tabellsammanställning - bergskärningar
Slutsatser Banksektioner
Beskrivning av fordonsrörelser vid simuleringarna
Banksektioner med öppet dike Banksektioner utan öppet dike
Tabellsammanställning - banksektioner Slutsatser SLUTDISKUSSION LITTERATURFÖRTECKNING BILAGA 1 - H VTI RAPPORT 203 30 36 2
3
43
MM U6 M7 7 7 50 52 57 58 60av Rein Schandersson
Statens väg- och trafikinstitut (VTI)
581 01 LINKÖPING
REFERAT
Syftet med undersökningen har varit att jämföra säker-heten vid avkörning vid olika utformning av vägens sido-utrymme.
Från statens vägverk har erhållits förslag till utform-ningar för tre olika kategorier av sidoutrymmen
(jord-skärningar, bergskärningar och banksektioner). Data för
jämförelsen har erhållits genom användning av en
fordons-dynamisk datormodell. Denna modell gör det möjligt att
simulera avkörningsolyckor och därvid använda olika data för sidoutrymmet.
Flera olika kriterier har använts för att jämföra
säker-heten vid avkörning. Främst har vältningsrisk,
uppträ-dande krafter, tid då fordonet är i luften och
skaderisk-index använts.
Resultaten visar att bland de av statens vägverk före-slagna sektionerna, finns både jordskärningar och bank-sektioner, som torde ge tillfredsställande säkerhet vid
avkörning. Däremot synes de föreslagna bergskärningarna
vara mindre tillfredsställande ur
trafiksäkerhetssyn-punkt.
Safety in Run-off-the-Road Accidents
An Evaluation of Different Roadside Design by Computer Simulation
by Rein Schandersson
National Swedish Road and Traffic Research Institute
5-581 01 LINKÖPING SWEDEN
ABSTRACT
The purpose of this investigation was to compare the sa-fety in run-off-the-road accidents for different road-side designs.
The different roadside cross-sections were suggested by
the National Road Administration. They comprised three
different types: soil cuttings, rock cuttings and
embank-ments. A computerized model of vehicle dynamics provided
results for the comparisons. With the use of this model,
run-of-the-road accidents CRM] be simulated. Different
data (eg different roadside designs) can be given as
in-put to the model.
Several different criteria were used, when comparing the
simulation results. Among these were the risk for
roll-over, the external forces, time spent without ground con-tact and severity index.
The results show that among the cross-sections suggested by the National Road Administration, there are both earth cuttings and embankments that are likely to provide sa-tisfying safety with reSpect to run-off-the-road
acci-dents. On the other hand, none of the rock-cuttings can
be regarded as satisfying, from a traffic safety
view-point.
Trafiksäkerhet vid avkörning i vägens sidoutrymme
Utvärdering av olika sidoutrymmessektioner genom simule-ring i dator
av Rein Schandersson
Statens väg- och trafikinstitut (VTI)
581 01 LINKÖPING
SAMMANFATTNING
Vid statens väg- och trafikinstitut (VTI) har tidigare avkörningsolyokornas förekomst, skadeföljd och kostnader undersökts för olika väg- och trafikmiljöer på det
stat-liga vägnätet. Dessa resultat gör det bl a möjligt att
se hur skadeföljden varierar med utformningen av
sidout-rymmet. iEn begränsning är chxnç att endast befintliga
sidoutrymmen har studerats. För utvärdering av nya
ut-formningar av sidoutrymmet är därför inte analys av
svenskt trafikolyoksmaterial tillräckligtw
.Andra.:meto-der, som .litteraturstudier eller, :xml i föreliggande
undersökning, datorsimulering måste användas.
Syftet med undersökningen har varit att genom simulering
i dator utvärdera trafiksäkerheten vid olika
utform-ningar av sidoutrymmet. Undersökningen har omfattat
to-talt 22 olika sidoutrymmessektioner av tre olika katego-rier (jordskärningar, bergskärningar och banksektioner). Samtliga utvärderade sektioner har föreslagits av sta-tens vägverk, som även finansierat undersökningen.
Vid datorsimuleringen har en fordonsdynamisk modell
- HVOSM - använts. Denna modell gör det möjligt att
simulera fordonets rörelser vid t ex avkörningsolyokor. Därigenom kan konsekvenserna av en avkörning studeras för olika utformningar av sidoutrymmet.
Inom ramen för undersökningen har endast ett fåtal simu-leringar kunnat göras för var OCh.EH]<aV de 22
sektion-erna. Målsättningen har därvid varit att för varje
sek-tion genomföra minst en simulering med en kombinasek-tion av
ingångSparametrar, som motsvarar en mycket svår
avkör-ning. Detta har ansetts vara fallet när
avkörningshas-tigheten satts till 96 km/h och avkörningsvinkeln till
20°.
att den klart särskiljt olika sektioner m h t säkerheten
Denna kombination ingångSparametrar har, förutom vid avkörning, även haft bieffekten att resultaten varit
svåra att utvärdera, då fordonet utsatts för extrema
på-frestningar vid den simulerade avkörningen.
Flera olika kriterier har använts vid utvärderingen. De viktigaste av dem har varit resulterande acceleration i
olika riktningar, skaderiskindex och fordonets rörelser
(rollvinkel, chassiehörnens höjd relativt markytan m m).
Samtliga redovisade resultat avser en Ford Galaxie Sedan
1963. Eftersom denna bilmodell är föråldrad i vissa
av-seenden, har jämförande simuleringar gjorts med data för
en europeisk bil av mellanstorlek från mitten av
1970-talet. Dessa jämförande simuleringar visade relativt god
överensstämmelse, varför det kan antas att resultaten i huvudsak hade blivit desamma, om mer aktuella fordonsdata hade använts.
Undersökningen har bl a givit följande resultat:
- Av de utvärderade jordskärningarna synes de två sek-tionerna med lutningarna 1:6 och 1:6/1:2 reSpektive 1:4
och 1:ü/1:2 vara att föredra ur säkerhetssynpunkt
fram-för övriga sektioner (med lutningarna*) 1:3 och 1:2,
1:6 och 1:2, samt 1:3 och 1:3/1:2).
*) Lutningsangivelserna avser innerslänt och ytterslänt.
I de fall då inner- eller ytterslänt varit bruten
finns två angivelser (t ex 1:U/1:2), där den första avser delen närmast vägen.
ger dock föraren större möjligheter att reagera jämfört
med sektioner med lutningarna 1:4 och 1:M/5:1
reSpek-tive 1:6 och 1:2/5:1. Ingen av de utvärderade
berg-skärningarna gav dock tillfredsställande säkerhet vid
avkörning med använda ingångSparametrar.
- Banksektioner utan öppet dike vid bankfoten medger be-tydligt säkrare avkörning jämfört med identiska
sek-tioner med öppet dike vid bankfoten, åtminstone om
di-ket har en ytterslänt, som har lutningen 1:2 eller
brantare.
- Ingen av de utvärderade banksektionerna med öppet dike vid bankfoten gav tillfredställande säkerhet vid
simu-lering en; avkörning i. 96 km/h Imai avkörningsvinkeln
o 20 .
- Av banksektionerna utan öppet dike vid bankfoten gav de
som hade banklutningen 1:6 eller 1:a lägsta
skaderisk-index, med något företräde för den flaokare lutningen.
Sektionerna nmxi banklutningarna 1:3, 1:2/1:u**)
res-pektive 1:4/1:2**) gav ur säkerhetssynpunkt sämre re-sultat.
*) Lutningsangivelserna avser innerslänt och
ytter-slänt. I de fall då inner- eller ytterslänt varit
bruten finns två angivelser (t ex 1:4/1:2), där den
första avser delen närmast vägen.
**) Bruten bankslänt
Safety in Run-off-the-Road Accidents
An Evaluation of Different Roadside Designs by Computer Simulation
by Rein Schandersson
National Swedish Road and Traffic Research Institute
5-581 01 LINKÖPING SWEDEN
SUMMARY
The National Swedish Road and Traffic Research Institute (VTI) has earlier investigated the frequency, the
seve-rity' and the costs of run-off-thenroad accidents for
different road- and traffic environments on the national
road network. These results show, inter alia, how the
severity varies with the roadside design. However, the
results are limited to existing roadside designs.
There-fore, an analysis of Swedish traffic accident data does not suffice for an evaluation of new roadside designs. Other methods, like literature studies, or, as in this case, computer simulation must be used.
The purpose <of this investigation. was tu) evaluate
-through computer simulation - the traffic safety of
different roadside designs. The investigation comprised
a total of 22 different roadside cross-sections of three different types (soil cuttings, rock cuttings and
embank-ments).
The National Road Administration suggested all <M? the
evaluated cross-sections and also financed the
investi-gation.
In the computer simulations, a model of vehicle dynamics
- HVOSM - was used. With the use of this model vehicle
motions in run-off-the-road accidents can be simulated. This makes it possible to study the consequences of
en-chroachments in different roadside cross-sections.
Within the frame of the investigation, it was only pos-sible to simulate a few enchroachments for each of the 22
cross-sections. However, at least one simulation for
each section was performed with a combination of input parameters, which corresponds to a very severe
run-off-the-road accident. This was considered the case with an
encroachment angle of 200 and a speed at 96 km/h
(60 MPH). ThiS combination CM? input, parameters, 'which
clearly separated different cross-sections with respect
to safety :ha run-off-the-road accidents, also luui the
effect that the results were difficult to evaluate, since
extreme vehicular loads were simulated.
Several different criteria were used in the evaluation.
Among them were resulting acceleration in different
directions, severity index and vehicle motions (roll
an-gle, time spent without ground contact etc).
All results shown relates to a Ford Galaxie Sedan 1963.
Since this model is out of date in some respects, test
simulations have also been performed with data for a
EurOpeen middle-sized car from around 1975. The results of these simulations correspond relatively well to the
ones for the older car model. Therefore, it was
conclu-ded that the results as a whole would have been similar,
if data for the more modern car had been used.
The results <M? the investigation can be summarized as
follows:
- Among the soil cuttings, the two sections with the
slo-pe combinations* of 1:6I 1:6/1:2 and 1:4 i 1:4/1z2
re-spectively, seem prefarable (from 21 traffic safety
vieWpoint) to the three sections with the slope
combi-nations* of 1:33:1:2, 1:6$ 1:2 and 1:3$ 1:3/1:2.
* Both lepes are given (eg 1:6 i 1:2) ordered by the
distance from the road. A broken slope is indicated by
a slash (eg 1:4/1:2).
- The suggested rock cuttings were difficult to evaluate.
The cross section with the slope combination* of 1:6 i 1:6/5:1 gives the driver a greater chance to react,
compared to the other two sections (slope combinations*
of 1:H i 1:ü/5:1 and 1:6 I 1:2/5:1). However, none of
the rock cuttings can be said to provide satisfying
sa-fety for a vehicle with a Speed of 96 km/h and an
en-croachment angle of 200.
- Embankements without an open ditch probably provide possibilities for a safer encroachment, than similar
sections with an Open ditch. At least this would be
the case, if the outside slope of the ditch is 1:2 or steeper.
- None of the evaluated embankment sections with an Open
ditch proved satisfying in simulations with 96 km/h as
vehicle speed and 200 as eneroachment angle.
- Among the five embankment sections with covered ditch, the two with embankment lepes of 1:6 and 1:M respec-tively, gave the lowest severity index. Results for the
three sections with embankment slopes of 1:3, 1:2/1:M**
and 1:4/1:2** were worse, with respect to traffic sa-fety.
* Both slopes are given (eg 1:6 1:2) osdered by the
distance from the road. A broken slope is indicated
by a slash (eg 1:H/1:2).
** Broken embankment lepe
Avkörningsolyckorna utgör 0 2/5 av de polisrapporterade
trafikolyckorna på det statliga vägnätet. Då
avkörnings-olyckorna svarar för 0 1/3 av dödsavkörnings-olyckorna och hälften av personskadeolyckorna utgör dessa olyckors humanitära och ekonomiska konsekvenser en stor del av samhällets
totala trafikolyckskostnader. Det är därför av stor vikt
att finna metoder för begränsning av dessa olyckors antal och skadeföljd.
Vid statens väg- och trafikinstitut (VTI) har tidigare
avkörningsolyckornas förekomst, skadeföljd och kostnader
undersökts för olika väg- och trafikmiljöer på det
stat-liga vägnätet (1, 2, 3, 4). Dessa resultat gör det
möj-ligt att se hur vägens utformning påverkar antalet avkör-ningsolyckor, samt hur olika typer av objekt i
sidoutrym-met inverkar på skadeföljden. Det är däremot svårare att
uttala sig (nn inverkan zur själva sidoutrymmessektionen
(släntlutningar och -höjder), då .resultaten.
huvudsak-ligen avser de sektioner, som beskrivs i gällande anvis-ningar (5, avsnitt 3.1.2). Andra typer av sidoutrymmes-sektioner måste därför utvärderas med metoder, som ej
an-vänder det svenska olycksdatamaterialet (t ex
simule-ring, litteraturstudier, fullskaleförsök).
I föreliggande projekt har simulering i dator använts för att göra en jämförelse av risken för skador vid avkörning
i olika sidoutrymmessektioner. De aktuella sektionerna
har tagits fram vid statens vägverks (VV) interna
utred-ningsarbete*), där även byggnads- och driftskostnader
studerats. Dessa kostnader måste ställas i relation till
den eventuella skillnad i olyckskostnad (dvs den ändrade
skadeföljden som. kan åstadkommas genom olika
utform-ningar av sidoutrymmessektionen).
*) Projektet "Vägens sidoutrymme" vid CF/Tut
grammet - HVOSM ) - har gjorts under ett uppdrag åt
Syd-kraft AB (4).
*) Highway-Vehicle-Object Simulation Model (6)
de avkörningsolyckor har varit att ge underlag för
ut-formning och utvärdering av lämpliga åtgärder med avse-ende på vägen, trafiken och sidoutrymmet. Sådana åtgärder
kan dels avse reduktion av antalet avkörningsolyckor,
dels lindring av olyckornas skadeföljd. I föreliggande undersökning har endast den senare aspekten behandlats. Syftet med projektet har varit att studera säkerheten vid
avkörning vid olika utformningar av sidoområdet. Förutom
nuvarande utformningar (5) rum* av vägverket framtagna
förslag till alternativa utformningar (t ex andra
slänt-lutningar och dikesutformningar) studerats.
nom simulering i dator. Därvid har det amerikanska
dator-programmet HVOSM (6) använts. Detta program gör det
möj-ligt att förutsäga det sannolika händelseförloppet, samt de uppträdande krafterna på fordonet, vid avkörning i ett
visst sidoutrymme. Risken för personskada av viss
svår-hetsgrad (med åtföljande olyckskostnad) kan bedömas uti-från de påfrestningar fordonet utsätts för.
Det är inte möjligt att inom ramen för detta projekt dis-kutera de fördelar respektive nackdelar, som den valda
metoden - simulering - kan innebära. Den största
osä-kerheten torde dock röra i vad mån de simulerade
resulta-ten motsvara verkligheresulta-ten. Den valda programvaran, som
utvecklats under ett tiotal år, relativt väl validerad (6, 7) och har tidigare använts vid bedömning av lämplig
utformning av vägens sidoområde (7, 8). iDetta behöver
dock inte innebära att programmet i alla situationer ger
en korrekt bild av verkligheten. Bl a torde osäkerheten
bli större och tolkningen (avsnitt .4) svårare, ju mer
extrema situationer som simuleras.
En annan osäkerhet rör valet av ingångsparametrar*)
(av-snitt 4.3.2). Det kan inte uteslutas att en viss
kombi-nation av parametrar ger som resultat att ett visst sido-utrymme är "säkrare" än ett annat, medan en annan
kombi-nation kan ge motsatt resultat. För att säkra slutsatser
skall kunna dras bör därför helst ett flertal
simule-ringar göras för varje typ av sidoutrymme. Tyvärr har
detta ej varit möjligt. Endast ett fåtal (i vissa fall endast en) simuleringar har gjorts för var och en av de föreslagna utformningarna.
Vid tillämpning av de framtagna resultaten bör ovannämnda
osäkerheter, liksom i följande avsnitt gjorda
reserva-tioner, beaktas.
*) Det aktuella programmet använder inga stokastiska
processer. Vid givna ingångsparametrar är
händelse-förloppet deterministiskt. VTI RAPPORT 203
.'l
Projektet omfattade utvärdering av de i avsnitt 4.1
visa-de sidoutrymmessektionerna. [Hwärderingen gjordes med
den amerikanska datormodellen HVOSM, vilken i korthet
diskuteras i avsnitt 4.2. På grund av det begränsade
an-tal simuleringar som gjordes var valet av
ingångSparamet-rar (avsnitt 4.3) av största vikt. Slutligen diskuteras
vilka av modellens utdata, som kan vara väsentliga vid
be dömningen av ett visst sidoområdes säkerhet vid avkör-ningsolyokor och hur data har använts vid utvärderingen
(avsnitt U.U).
Beträffande genomförandet bör även nämnas att förutom de
resultat. som. redovisas i. avsnitt 5, har ett :relativt
stort antal testkörningar gjorts med HVOSM. De flesta av
dessa gjordes vid det i avsnitt 1 omnämnda uppdraget åt Sydkraft AB.
indatakodning och tolkning av utdata, samt kunskaper för
Därvid erhölls värdefulla erfarenheter av
val av lämpliga parametervärden. Vid testkörningarna
an-vändes i flertalet fall lägre hastighet och mindre avkör-ningsvinkel än vid produktionskörningarna i föreliggande undersökning.
Sektionstyper
De av statens vägverk föreslagna sektionerna är av tre kategorier - jordskärningar, bergskärningar och
banksek-tioner. Släntlutningar och -höjder framgår av figurerna
* nedand I[ samtliga fall åü°vägbanan.(körbanana-vägren ))
*) Vägrenen har antagits vara belagd.
lativt tvär, men motsvarar i stort sett den "naturliga"
övergång, som fås genom inverkan av naturkrafterna.
Bi-laga 1 ger i detalj besked om hur dessa övergångar har
kodats.
§959§5§EEÅ95ê§
I figur 1A och 1B visas skisser av utvärderade sektioner
av kategorin jordskärning. Som synes visas fyra
huvud-typer och totalt nio varianter. Typ 1A ooh 1B är
van-ligast förekommande cxü1 anges i. gällande
anvis-ningar (5). Övergången mellan olika lutanvis-ningar framgår av
bilaga 1. Dikesdjupet är 1,1 m för sektionerna 1A ooh 1B, samt 0,5 m för övriga sektioner.
VTI RAPPORT 203 TYP 1A PLAN 1:40 / 1:3 X TYP 1B
1:40
1
PLAN
:3 (L //Ã X..PLAN
EEGåQäâ 4% 140 1..4 1:4 // PLANx'l
4%
TYP 2B :40 1:4 1-. O lj M 1 I I I I I [iii J | I I I 1 I | I LFigur 1A. Skiss av sektioner (jordskärningar).
4 F
\|\
|
M
0 0 m m M M.\PLAN.
TYP 3A ' /1:40
1:6
TYP 3BPLAN
TYP 3C 1 F>IJZÅIJ TYP 4A1:40
1:
LAN TYP 4B , P .Figur 1B. Skiss av sektioner (jordskärningar).
VTI RAPPORT 203 O O U' IU 'I
P'
h
Tre olika utformningar av väg i bergskärning har testats
(se figur 2). Övergången mellan olika lutningar
redovi-sas i bilaga 1.
till 0,5 m.
För samtliga typer har dikesdjupet satts
Väg Sidoutrymme L 4 v T N M 1:40 Ju., Å
/
.i
A
_720,5 M
TYP 3D 1:40 16 116TYP 33
N
ut). 140 16
XKl /%
40,5D4
--1 5 M 0 l I l I | | 4Figur 2. Skiss av sektioner (bergskärningar).
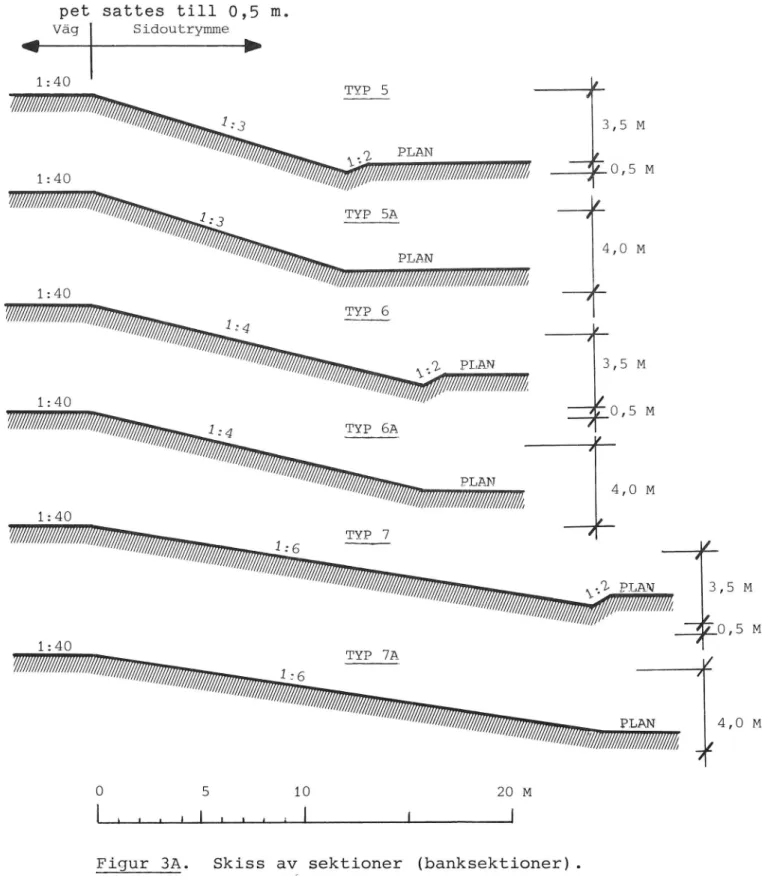
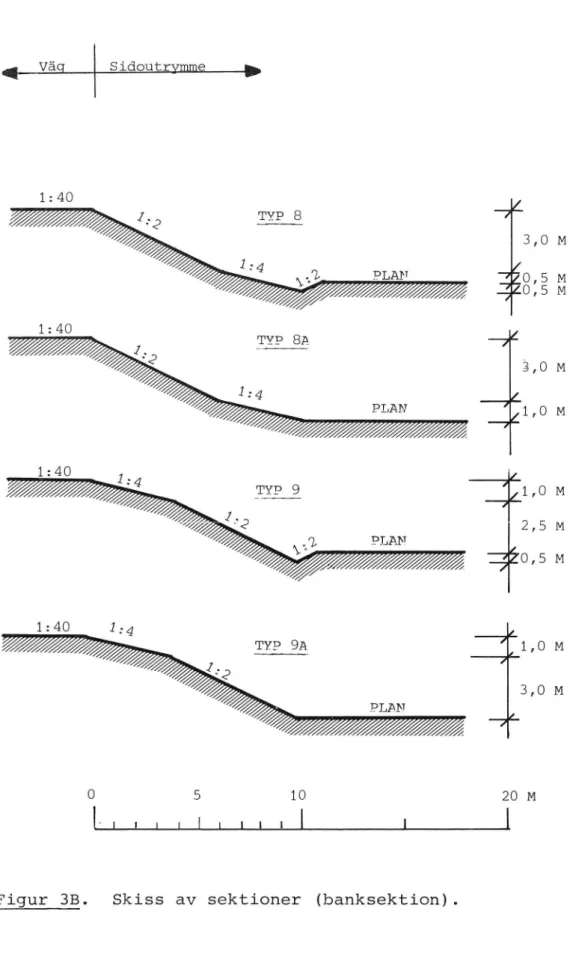
Fem olika huvudtyper har utvärderats (se figur 3A och 3B).
respektive utan öppet dike
-Dessutom uppställdes två olika alternativ - med för var och en av dessa. Övergången mellan olika lutningar redovisas i bilaga 1.
För samtliga banksektioner sattes bankhöjden till u,0 m (höjdskillnaden mellan vägbanan ooh bankfot).
Dikesdju-pet sattes till 0,5 m.
Väg l Sidoutrymme
|
:4G,
TYP 5
_---4
L_ 1:3 3,5 M PLANX??
'
'_7LCL5 M
;40
/ "__"7f'
1:3 :Il/'P 5A _'7L 4,0 M EEAN'
z
:40--7L-"
ggP 6
1 4 _äL. / . ng EEAN :LS M / ' A :40 _-7âxu5 M / 1 4 TYP 6A , PLAN . 4,0 M 4D /I = 4. TYP 7 7 1:6 ___äl_ Xgl PLAN_ 3,5 M / / L 7 0,5 M.40
*vt
' A TYP 7A 4 1:6 7*PLAN
4,0 M
//
/
/ 7f O 5 10 20 M I i 1 1 I l l l 1 1 I I JFigur 3A. Skiss av sektioner (banksektioner).
PLAN PLAN PLAN Väq Sidoutrvmme ;Ti 1:40 . TY 8
1.3
__31_
1:4 . vi 1:40 1 ;YP 8A :2 1:4 1:40 1_'4
117139
Z.q ,,/// .< vi 1:40 1:4 *- TYP 9A 1:2 5 10 L] I 1 | I 1 1 | IFigur 3B. Skiss av sektioner
VTI RAPPORT 203
(banksektion).
2
2
Datorprogram
Det använda datorprogrammet - HVOSM
(Highway-Vehicle-Ob-ject Simulation Model) - gör det möjligt att simulera
fordonsrörelser på och vid sidan av vägen, samt konsek-venserna av kollision med objekt av olika slag (t ex
väg-räcken, trottoarkanter). De första varianterna av
pro-grammet utvecklades vid Cornell Aeronautical Laboratory
(9, 10) medan den i detta projekt använda varianten har
erhållits från Federal Highway Administration i USA (6). Datorkörningarna har utförts vid Stockholms Datorcentral
(QZ) på eu] IBM 370/165, där programmet finns lagrat i
körbart skick*).
Det finns två officiella versioner av programmet**),
vil-ka till viss del har Speciella användningsområden. Den
ena.- RD2 - har huvudsakligen använts iün° att studera
konsekvenserna av kollisioner med objekt (vägräcken
eller dylikt) eller avkörning. Den andra - VD2-
utveck-lades speciellt, med tanke på studier av effekter av
bromssystem och av förarbeteendet. De två
programver-sionerna täcker delvis varandra, eftersom VD2 êümni kan användas vid simulering av avkörningar.
I avsnitt 4.2.1 nedan ges en kort beskrivning av
program-mets möjligheter och begränsningar. Avsnitten därefter
behandlar vilka indata som krävs och de typer av utdata
som kan erhållas vid en simulering.
*) Gunnar Ahlqvist vid QZ har modifierat programmet, så
att IBM 370/165 kan användas.
**) Omfattande dokumentation ges i (6).
.2.1 Användningsområden och begränsningar
Dokumentationen (6) anger att de två pr0gramversionerna
ger användaren möjlighet att simulera följande
situa-* tioner ):
- Samtidig behandling eur ett fordons rörelser och dess handhavande, där fordonet kan ha individuellt
fjädran-de hjul eller stela axlar eller någon kombination av
dessa.
- Kollisionskrafter mellan fordonet och objekt vid sidan
av vägen (endast RD2).
- Inverkan av olika terrängförhållanden på fordonets
be-teende.
- Effekten av kontakten mellan däck och trottoarkanter
och dylikt på fordonets beteende.
- Hjulrotationens inverkan på fordonets rörelser (endast VD2).
- Kapaciteten hos olika bromssystem samt inverkan av
dessa på fordonets rörelser (endast VD2).
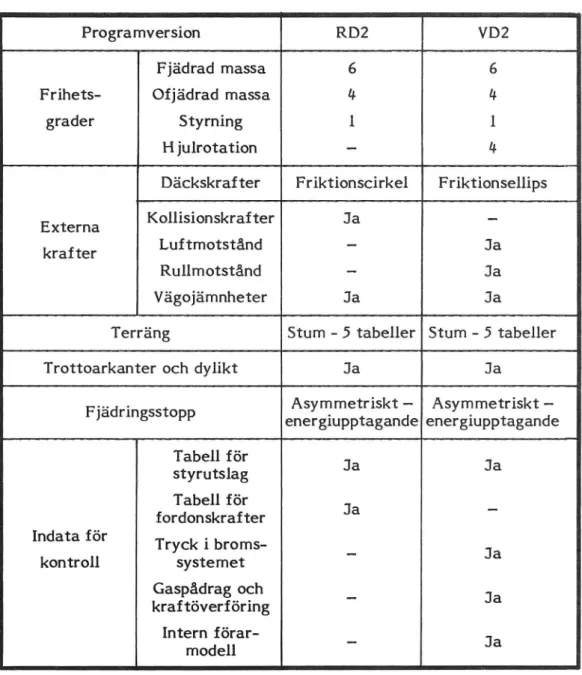
En översiktlig bild av programmöjligheterna ges av
ta-bell 1, som direkt översatts från manualen (6). Tata-bell 1
visar även skillnaderna mellan de två
pr0gramversion-erna .
*) Innehållet i detta avsnitt (liksom 4.2.2 och 4.2.3)
bygger på vad som står i användarmanualen (6, Vol 1).
För mer detaljerad information hänvisas till denna och övrig dokumentation (6, Vol 2-Vol 4).
Tabell 1. Översikt av programmöjligheter hos HVOSM.
Källa: (6, vol 1, sid 37)Programversion RD2 VDZ
Fjädrad massa 6
Frihets- ijädrad massa 4
grader Styrning l 1
H julrotation - 4
Däckskrafter Friktionscirkel Friktionsellips
Kollisionskrafter Ja
-Externa
krafter Luftmotstånd - Ja
Rullmotstând - Ja
Vägojämnheter Ja Ja
Terräng Stum - 5 tabeller Stum - 5 tabeller
Trottoarkanter och dylikt Ja Ja
. Asymmetriskt - Asymmetriskt
-Fladnngssmpp energiupptagande energiupptagande
Tabell för Ja Ja
styrutslag
Tabell för 3 __
fordonskrafter a
Indata for Tryck i broms- _ Ja
kontroll systemet Gaspådrag och __ Ja kraftöverföring Intern förar- __ Ja modell VTI RAPPORT 203
Användarmanualen (6, vol 1) anger vissa begränsningar
till följd av förenklingar:
- Fordonsmodellen är begränsad till fordon på fyra hjul
(utan släp) :maj antingen individuell fjädring eller
stela axlar. Hänsyn tas ej till fjädringens inverkan
på styr- och cambervinklar.
- Det finns ingen modell av hela styrsystemet. I stället
relateras indata för styrutslag samt styrningens
fri-hetsgrad direkt till de två framhjulens genomsnittliga
styrvinkel.
- Däcken behandlas som skivor och därför kan smärre fel
uppstå vid skarpa terrängojämnheter, om hjulet är
pa-rallellt med en ojämnhet.
- Stötdämpningens karakteristika antas vara symmetriska.
- Det antas att sidkrafterna på ett däck tas upp på ett
konstant avstånd från den punkt där förlängningen av framhjulets styraxel skär markytan.
- Egenskaperna för däckens radiella intryckning vid last
(radial load-deflection Characteristics) som
tdline-ära, helt elastiska fjädrar utan dämpning.
- Däckens sidkraftskarakteristika är okända vid extrema
normalkrafter. Därför hålls styvheten konstant vid
ex-trema lastförhållanden, medan den varieras inom det
lastområde där mätdata är kända.
- Terrängen antas alltid vara oeftergivlig.
- Vissa fel kan uppstå vid användning av en
programmöj-lighet kallad "terrain boundary feature". Denna
möj-lighet har ej utnyttjats i föreliggande projekt, liksom inte heller möjligheten tüJJ. "road roughness input",
vilken också har vissa begränsningar.
- Kollisionskrafter på den fjädrade massan kan endast
be-räknas för hinder/objekt med vertikal utsträckning.
- Kontakten mellan fordonets ohassie och markytan kan ej
*)
simuleras .
- Simulering av kollision med eftergivliga hinder kräver att de senare antages sakna massa.
- Reservationer måste i vissa fall göras mot de resultat som framkommer vid simulering av kollision med objekt.
**
Den relativt omfattande mängden indata ) till modellen
är uppdelad i sex olika indatablock. Vissa smärre
skill-nader finns mellan programmets två versioner, dessutom
kräver VD2 något mer indata jämfört med RDZ.
I block nr 1 anges först identifikation, simuleringstid,
tidsinkrement och önskvärt omfång på utdata. Vidare
an-ges fordonstypen (m a p fjädringen), eventuellt krockob-jekt, integrationsmetod m m.
Fordonsdata anges i block nr 2. Dessa består av ett
an-tal viktuppgifter, fjäderkonstanter, tröghetsmoment,
vinklar m m (C 100 parametrar totalt). Till
programpa-ketet hör även ett processorprogram, som kan ge
fordons-*)
**
konstanter för sex vanliga (i USA) bilmodeller , om
användaren skulle sakna dessa data.
*) Detta innebär t ex att det är omöjligt att
konsta-tera konsekvenserna av en vältning i sidoområdet.
**) Som exempel visas i bilaga 2 en utskrift av indata,
som programmet åstadkommit.
***) Ford Galaxy Sedan 1963, Dodge Coronet 1971,
Chevro-let Brookwood 1971, Pontiac Trans-Am 1971,
Volks-wagen Super Beetle 1971 och Vega Sport-Coupé 1971.
I block nr 3 anges data för däcken och kontakten
(frik-tionen) med underlaget. Det finns möjlighet att använda
olika data för vart och ett av de fyra däcken. En del av
de konstanter som ges är egentligen multiplikatorer för
friktionen. Själva friktionen för olika terrängavsnitt
ges i block nr 5. För block nr 3 finns en skillnad
mellan programmets två versioner. För VD2 anges
fidk-tionsmultiplikatorer för olika hastighet och last, medan RD2 antar konstant friktion för olika last-/hastighets-förhållanden.
Block nr M används för att ange kontrollerade eller
önsk-värda fordonsmanövrar. I RD2-versionen finns möjlighet
att variera dels styrningsvinkel, dels hjulens
broms-krafter.
I VD2-versionen kan data anges för styrningsvinkel,
lik-som för den mer förfinade modellen av bromssystemet.
Dessutom.Lun1 i VD2-versionen data ges, som k0pplar in förarmodellen, så att den försöker åstadkomma vissa
for-donsmanövrar.
Terrängen (vägbanan och/eller sidoområdet) beskrivs
gen-om indata i block nr 5. Terrängen rutindelas och för
varje ruta anges koordinater och höjder i tabeller.
Möj-lighet finns att variera rutindelningen, liksom att ange
lutningsförändringar inom en ruta.
Preprocessorprogram-met kan användas för att erhålla data i lämplig form,
ut-ifrån en grov beskrivning av sidoområdet. I block nr 5
anges även grundfriktionen inom olika terrängavsnitt.
Dessutom kan eventuella kantstensdata och data för
väg-räcke (RD2-versionen) anges. Som alternativ till
ter-rängtabellerna ovan kan höjder anges för max 2 200 punk-ter med inbördes konstanta avstånd.
I det sista indatablocket - block nr 6 - anges bl a for-donets samt dess hjuls position och hastighet vid simule-ringens början.
.2.3 Utdata
Utskrifterna, som delvis styrs av indatablock nr 1, är
uppdelade i 19 grupper. Utskrifter sker efter bestämda
tidsintervall, vilka bestäms av användaren. Nedan
sam-manfattas utdatagruppernas innehåll, vilket delvis är
olika för de två programversionerna.
Utdata-grupp nr Utskriftens omfattning*
)
1 Fordonets läge i. ett fixt
koordi-natsystem, samt dess hastighet och acceleration i olika riktningar.
2 Fordonets vridning och
vinkelhas-tighet runt olika koordinataxlar.
Dessutom kurs- och hjulvinklar.
3 De fyra hjulens rörelser (avvikelse
och hastighet) i. förhållande till
fordonschassiet. **
) Data rörande bl a
vinkelaccelera-tioner, hjulaccelerationer.
5 Friktions- och st0ppkrafter för
styrningen samt hastighet och acce-leration för styrvinkeländringen. JMG)
Hjulstyrvinklar och cambervinklar
relativt markytan. **
) Hjulens longitudinella och laterala
hastighet parallellt med markytan. **
) Terränghöjder IRM* hjulens
kontakt-punkter med marken.
Olika krafter som berör modellen av
fordonets fjädring.
*) Vid varje tillfälle och för varje grupp görs även
ut-skrift av simulerad tid.
**) Utskrift endast om så begärts i indatablock nr 1.
Utdata-grupp nr 11 12
13
*56) 1H 15 16 17 1819
20)
* Utskriftens omfattningRadiella krafter och rullradier för däcken.
Sidkrafter och normalkrafter
(rela-tivt markytan) för däcken m m.
Broms- eller drivkrafter på hjulen/ däcken (om sådana angivits i inda-tablock nr 4).
Krafter på däcken dels vertikalt,
dels i olika riktningar i ett for-donsrelaterat koordinatsystem.
Terrängnivå under respektive
hjul-centra samt vinkeln mellan terräng
och hjul.
Fordonsacceleration i. olika
rikt-ningar vid två speciella
tidpunk-ter, vilka kan anges i indatabalock nr 2.
Hjulslip, friktionskvot och
rota-tionshastighet för hjulen (VD2),
eller data rörande kollision med
objekt (RD2).
Tryck, kraft. och temperatur i
bromssystemet (VD2), eller data
rö-rande kollision med objekt (RD2).
Energiupptagning i bromssystemet
(VD2), eller data rörande kollision med objekt (RD2).
Förarmodellens agerande, om
(en-dast VDZ) denna option använts.
*) Vid varje tillfälle och för varje grupp görs även
ut-skrift av simulerad tid.
**) Utskrift endast om så begärts i indatablock nr 1.
4.
A.
3
3.1
Val av programversion och parametervärden
Programversionen VD2 har genomgående använts vid simule-ring av avkörningar i de olika sidoutrymmestyperna.
Moti-* ven för att denna version valdes anges i avsnitt H.3.1 ).
är vissa svårigheter
Detta
be-Som ovan diskuterats (avsnitt 3),
förknippade Imai valet av ingångSparametrar. *
handlas i avsnitt H.3.2 ).
Programversion
Vid valet av programversion är dels undersökningens syf-te, dels versionernas olikheter (se tabell 1 ovan) av be-tydelse.
UrSprungligen planerades ingen undersökning av bergskär-hade mycket talat för RD2-som kan användas vid simulering av kollision Nu valdes i stället
VD2-ver-eftersom denna dels använder en mer korrekt
mo-ningen. Om så varit fallet,
versionen,
med objekt i sidoutrymmet. sionen,
dell av däckens kontakt med markytan
(friktionsellip-sen), dels därför att hänsyn även kan tas till rull- och luftmotstånd.
na användas vid eventuella simuleringar av undanmanövrar
Dessutom skulle VD2-versionen bättre
kun-i skun-idoutrymmet.
Under projektets gång beslutades att även bergskärningar
skulle studeras. Även för dessa simuleringar kom
VD2-versionen att användas, vilket hade fördelen att resulta-ten direkt kunde jämföras med övriga simuleringar.
*) Avdelningsdirektör Staffan Nordmarks (VTI) hjälp har varit oumbärlig vid valet av programversion och
in-gångSparametrar (fordons- och däcksdata).
4.3.2
4.3.2.1
4.3.2.2
Yäféåê-2å-iQååEåêBêEêEêEEêE
Mängden av olika sidoutrymmesutformningar (totalt 22 va-rianter) begränsade rent praktiskt den tänkbara
varia-tionen av ingångSparametrarna. Endast en eller några få
avkörningssimuleringar gjordes för varje sidoutrymme.
Detta medförde att ingångsdata (se exempel i bilaga 2) i
stort sett var identiska (ett undantag är block nr 5 -terrängdata) för alla simuleringar.
PåEê-§§§-KQQE§911_êX_åigälêäigåêg
Simuleringar utfördes, där avkörningar varade från 1,5 till ca 10 sek (beroende på hastighet och avkörningsvin-kel). I samtliga fall användes tidsinkrementet 0,01 sek,
med utskrift varje 0,01 eller 0,05 sek.
Runge-Kuttas.
Som
integra-tionsmetod användes genomgående Inga
kantstensöverfarter simulerades.
Fordonsdata
För alla typer av sidoutrymmen har simuleringar gjorts
1963.
), tas direkt från
pre-med fordonsdata för Ford Galaxie Sedan, Dessa
data*) kunde, med något undantag**
processorprOgrammet. Mot detta val kan invändas att
bil-modellen är gammal samt dessutom större och tyngre än
många i Sverige vanliga bilmodeller. Därför gjordes även
några jämförande körningar, varvid typiska data för en
europeisk medelklassbil från mitten av 1970-talet
använ-des. Därvid framkom vissa skillnader, dock inga som
*) Se bilaga 2.
**) Bl a ändrades konstanten för
styrvinkelstOppfunk-tionen från 5 000 lb-in/rad till 20 000 lb-in/rad. VTI RAPPORT 203
u.3.2.3
U.3.2.4
4.3.2.5
tyder på att resultaten skulle ha blivit väsentligt
oli-ka, om denna bilmodell använts. Fördelarna med att
an-vända data för en Ford Galaxie var dels att dessa data är
väl validerade (6, 7), dels att resultaten kunde jämföras med i litteraturen redovisade resultat (7, 8).
Pêgkêéêêê
Samma däcksdata (se bilaga 2) har använts vid samtliga
simuleringar med en1 viss bilmodell. Data kuu° hämtats
från en stor undersökning, som gjorts i USA (11).
Eezéeaêkeaizell
Vid samtliga simuleringar har fri styrning och fri
rull-ning använts. Detta motsvarar antagandet att föraren
inte alls reagerar - bilen rullar av vägen (utan
motor-broms) och utan någon som håller i ratten. Antagandet är
inte alltför orimligt, men det hade givetvis varit värde-fullt om även t ex panikbromsning och försök till
undan-manövrar hade simulerats.
Iåffägågêåê
Sektionerna för (ka utvärderade sidoutrymmena har tidi-Här skall bara
till-läggas att sidoutrymmet antogs sakna de ojämnheter (gro-gare redovisats (avsnitt H.1.1).
par, stenar) och hinder (t ex träd), som ofta förekommer
i verkligheten.
Grundfriktionen antogs vara 0,7 på vägbanan och 0,35 i
*)
vägens sidoutrymmeHänsyn togs ej till eventuell krökning hos vägbanan.
En-dast avkörning från väg'utan horisontell eller vertikal
krökning simulerades.
3-2 6 lEÅEiêlX§E§§9_§§§_§9§§9§§E_229_§19§l§§i§5§2§_9§23§9
De viktigaste parametervärdena i initialskedet är
fordo-nets position, hastighet, och riktning (avkörningsvin=
kel). Figur 4 visar uppifrån fordonets och vägens läge i
förhållande till det fixa koordinatsystemet vid
simule-ringens *början. (cx = avkörningsvinkel, streckad pil
visar avkörningsriktning). Väg- Sido-bana område 11-
Va
;D I / /. /oc / / / X /f
/
/ z (riktad nedåt) YFigur 4. Skiss av fordon, väg och sidoutrymme vid
simule-ringens början.
*) I NCHRP Report Nr 158 (8) finns några friktionsvärden
angivna. T ex
Torr asfalt utan sand eller grus: 0,5 - 0,8
Våt asfalt utan sand eller grus: 0,3 - 0,6
Torr asfalt med sand eller grus: 0,15 - 0,30
Torr lös jord eller grus: 0,2 - 0,3
Vått, friskt gräs: 0,1 - 0,2
Våt sand, sand - grus: 0,2 - 0,4
Det finns även undersökningar där högre värden anges för sidoutrymmet.
Det går att göra en teoretisk beräkning av den maximala avkörningsvinkeln vid rak väg, när avståndet från
vägkan-ten, friktionen och hastigheten är kända. Detta har
gjorts i bl a (12), varur följande tabell konstruerats.
Tabell 2. Maximal avkörningsvinkel vid iriktionsnivån 14: 0,7 för
hastig-heterna 96 km/h och 70 km/h samt olika avstånd från
vägbane-kanten. Källa: (12)
- .. . . O . _
Avstånd från
Max1ma1 avkorningsvmkel ( ) Vld hastigheten
vägbanekant (m) 70 km/h 96 km/h
5,5 (motsvarar väg
med två körfält) 25,8 18,8
9,0 (motsvarar väg
med tre körfält) 33,2 24,1
Dessutom finns även vissa empiriska resultat rörande sam-bandet mellan avkörningsvinkel och hastighet som tyder på
att vinkeln minskar med ökande hastighet (13).
Från det vid VTI bedrivna arbetet rörande
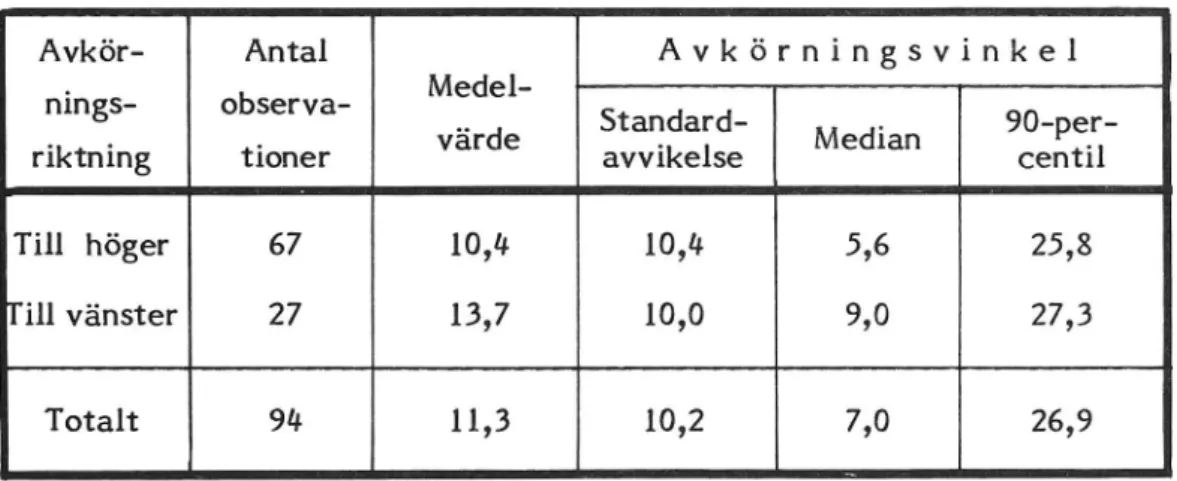
avkörnings-olyckor har följande tabell hämtats.
Tabell 3. Central' och Spridningsmått för avkörningsvinkeln vid olika
av-körningsriktning.
Källa: (4)
Avkör- Antal Avkörningsvinkel
.
Medel-nmgs- Observa_ .. Standard- M .
90-per-riktning tioner Värde avvikelse edlan centil
Till höger 67 10,4 10,4 5,6 25,8
Till vänster 27 13,7 10,0 9,0 27,3
Totalt 94 11,3 10,2 7,0 26,9
M
.M
Med ledning av bl a ovan redovisade data gjordes de fles-ta simuleringarna med avkörningsvinkeln 200, vilket
an-togs motsvara det svåraste fallet vid 96 km/h. Dessutom
gjordes några körningar med mindre vinkel (70) och några
med lägre hastighet (70 km/h).
För valet av avkörningshastighet finns få uppgifter i
96 km/h (: 60 mph)
därför att den nära ansluter till den vanligaste
hastig-litteraturen. Hastigheten valdes
hetsnivån i Sverige, samt för att underlätta jämförelsen
I USA används ofta denna hastighet även vid fullskaletest av vägräoken.
med utländska erfarenheter av HVOSM.
Tolkning och val av utdata vid utvärderingen
Datorprogrammet HVOSM genererar en stor mängd utdata vid
varje körning. Endast vissa av dessa är av speciellt
in-tresse vid utvärdering av olika utformningar av sidoområ-det.
riktningar, som föraren och passagerarna råkar ut för 1
Av störst intresse än" de accelerationer :i olika
ett fordon, som kör av vägen. Aocelerationsuppgifterna
Det råder
)0
kan relateras till risken för personskada.
* dock delade meningar om hur denna relation ser ut
I (8) och (12) används ett vid Texas Transportation In-stitute uppställt skaderiskindex (SI).
A 2 A 2 AZ 2
s: =
(3-)
+ (T1)
+ <Ã-
(4,1)
XM yM zM
*) I (8) finns en sammanställning över hur man vid olika undersökningar använt sig av olika relationstal.
där AX : registrerad acceleration i longitudinell riktning
AxM = maximalt tolerabel acceleration i longitud-. . .
inell riktning
A : registrerad acceleration i lateral
rikt-y ning
A M = maximalt tolerabel acceleration i. lateral
y riktning
A : registrerad acceleration i. vertikal
rikt-Z ning
A M = maximalt tolerabel acceleration i vertikal
Z riktning
Vanligen har medelvärden över 0,05 sek använts för de
re-gistrerade accelerationerna. För icke fastspända
perso-ner anges de tolerabla acceleratioperso-nerna till (8,12):
AxM
:
7 g
AyM : 5 g
AzM
=
6 g
Sambandet mellan skaderiskindex och personskador anges i
(8) som att SI 3> 1,0 sannolikt medför personskador om
säkerhetsbälte ej används, medan SI : 1,6 anges som den "säkra" övre gränsen för fastspända personer.
I (12) används en funktion, P,<ün°P uttrycker sannolikhe-ten för personskada (icke fastspända personer).
*)
P (z).=30 SI
<u.2).
"Allvarliga personskador antas vara sannolika. när SI
överskrider 1,5 (P = 30- 1,5 = #5 %)" (12).
*) Detta är inte någon sannolikhetsfunktion i strikt
statistisk mening.
Vid resultatredovisning i föreliggande undersökning an-ges skaderiskindex vid avkörning 1 (ha olika
sidoutrym-mena. Detta skaderiskindex har emellertid räknats ut med
hjälp av aooelerationerna i fordonets massoentrum, som
kan skilja sig något från accelerationerna på
förar-eller passagerarplats.
Som tidigare nämnts (avsnitt .2.1) tar HVOSM - VD2 ej
hänsyn till om andra delar - förutom hjulen - kommer i
kontakt med marken. Det är därför väsentligt att
under-söka om de nedre chassiehörnen tränger ned i marken vid
avkörningen. En liten nedträngning medför sannolikt inga
svårare följder. Vid djupare nedträngning kan antas att
fordonet skadas och att simuleringsresultaten därmed
blir osäkrare. I[ (8) refereras en] uppgift (nn att de
flesta jordskärningar medger att fordonets kofångare
tränger ned 2" (drygt 5 om) utan att chassiet deformeras.
Ett annat kriterium för att avgöra säkerheten hos ett
sidoområde skulle kunna vara den tid, då föraren har full
kontroll över och kan manövrera sitt fordon. Det är
emel-lertid mycket svårt att uppställa kriterier av denna typ.
För relativa jämförelser kan man emellertid studera hur lång tid alla, flera eller ett hjul saknar kontakt med marken.
Slutligen har här, liksom i (8) ett stabilitetskriterium
använts för att jämföra olika situationer. Denna
stabi-litetskvot (sk) kan uttryckas som:
maximal simulerad rollvinkel Sk = gräns för statisk rollvinkel
Gränsen för den statiska rollvinkeln kan uttryckas som (8):
o = arctg gg
(4.3)
där T : spårvidd
H 2 masscentrums höjd Över marken vid
stillastå-ende
För det använda fordonet en Ford Galaxie Sedan 1963 -blir gränsen för den maximala rollvinkeln ca 530.
.1
RESULTAT
En separat redovisning av resultaten sker för varje
kate-gori av sidoutrymmessektioner. Redovisningen görs dels
med tabeller, som sammanfattar resultaten för de olika typerna inom varje kategori, dels med beskrivningar av händelseförlOppen vid simuleringarna. Som komplement
re-dovisas även figurer över den resulterande
accelera-tionen (bilaga 3) och de främre fordonshörnens rörelser i
förhållande till markytan (bilaga ü). Figurerna har
pro-ducerats med hjälp av ett datorprogram, som (om så öns-kas) kan plotta samtliga HVOSMs utdata. Av praktiska skäl redovisas dock endast ovannämnda figurer.
I samband med resultatgenomgången görs speciella anmärk-ningar, om det kan antas att någon simulering kan vara
missvisande. För samtliga kategorier zur sidoutrymmen
gäller att simuleringar gjorts med en Ford Galaxie Sedan 1963 (med fordons- och däcksdata enligt bilaga 2),
avkör-ningsvinkeln 200 och hastigheten 96 km/h (jämför avsnitt
u.3.2 .
ringar, där avkörningsvinkeln varit 70.
För jordskärningar redovisas dessutom
simule-Jordskärningar
Två serier av simuleringar har gjorts för de typer av
jordskärningar, som beskrivs i avsnitt ü.1.1. Skillnaden består dels i att avkörningsvinkeln varit 200 respektive 70, dels i att olika utskriftsintervall använts - 0,01
respektive 0,05 sek. En reservation måste göras mot de
resultat, som erhållits med intervallet 0,05 sek. De
si-mulerade förlOppen är mycket snabba och väsentliga resul-tat kan ha dolts vid detta utskriftsintervall.
Med korta utskriftsintervall och långa simuleringstider genereras en mycket stor, oöverskådlig mängd utdata. När detta intervall använts har därför endast 0 1,5 sek verk-VTI RAPPORT 203
*
lig tid simulerats ). För att se om fordonet passerar
yttersläntens krön har kompletterande körningar gjorts
0,05 sek), där 8-10 sek
ningsförlopp simulerats. Dessa resultat detaljredovisas
(utskriftsintervall :
avkör-ej, utan nämns endast i kommentarerna.
Nedan ges först korta beskrivningar av händelseförloppen vid simulerad avkörning i respektive typ av jordskärning
(avsnitt 5.1.1).
fattar resultaten (avsnitt 5.1.2) och slutligen
samman-fattas de (avsnitt 5.1.3) för
jordskärningar.
Därefter lämnas de tabeller som
samman-redovisade resultaten
Beskrivning av fordonsrörelser vid simuleringarna Sektion 1A
Vid hastigheten 96 km/h och avkörningsvinkeln 20O tappar alla hjul kontakten med marken, när fordonet kör ut över
Alla hjul är i luften från 1: = 0,6 sek
till t = 0,75 sek. fram.
innerslänten.
Det första hjul som tar mark är höger Nedslaget, som sker på ytterslänten, blir mycket
kraftigt och en resulterande acceleration av 8,83 g
upp-träder. Även höger bakhjul tar mark på ytterslänten
(t R5 0,92 sek) och ger den resulterande accelerationen 13,50 g.
och vänster framhjul tar mark (t ?ü
Därefter studsar dessa hjul äter upp i luften 1,05 sek) varvid den
27913 g
'-streras. I samband med denna mycket kraftiga stöt
avbry-största resulterande accelerationen -
regi-ter programmet simuleringen. Sannolikt p g a att
fordo-net välter.
*) I stort sett innebär detta att simuleringen omfattar
tiden fram tills fordonet når ytterslänten.
Inga större riktnings- eller kursförändringar uppträder
vid detta korta avkörningsförlopp. När simuleringen
av-bryts befinner sig fordonet på ytterslänten med vänster
bakhjul i diket och tenderar att åter komma ned i diket. Bortsett från den sannolika vältningen på slutet uppnår
rollvinkeln värdet 27° strax innan fordonet tar mark.
Resultaten måste tas med reservation, eftersom chassie-hörnet (höger fram) sannolikt tränger djupt ned i marken innan höger framhjul träffar ytterslänten.
När avkörningsvinkeln ändras till 70 fås ett något
lugna-re förlOpp. Inget hjul tappar markkontakt, när fordonet
kör ut över innerslänten. Vid t = 1,90 sek når höger
framhjul ytterslänten och detta resulterar i en stöt, som
ger den resulterande aooelerationen 2,68 g. Kursvinkeln
har då ökat från 70 till 12°. Programmet tar ju ej hänsyn
till chassiets kontakt med marken, men eftersom chassiets
främre högra hörn uppges befinna sig 0 30 om under
mark-nivå vid t = 1,90 sek, är det tveksamt om det fortsatta
händelseförloppet är korrekt. I detta anges att fordonet
sladdar runü: på ytterslänten, åter hamnar i. diket och välter vid t : 5,36 sek.
Sektion 1B
Kombinationen 96 km/h och 200 vinkel ger exakt samma
hän-delseförlopp som för sektion 1A (se ovan). Det beror på
att programmet avbryter innan fordonet nått den punkt där
sektion 1B skiljer sig från sektion 1A (se avsnitt
0101).
När avkörningsvinkeln sätts till 70 fås ett förlopp som i
början överensstämmer med sektion 1A. Vid t = 1,90 sek
når höger framhjul ytterslänten, vilket några ögonblick
senare resulterar i en stöt av samma storleksordning, som
för sektion 1A. Vid denna tidpunkt registreras
posi-tionen för främre högre chassiehörnet till o 30 om under
markytan. Därför bör inte alltför stor vikt fästas vid
det fortsatta förloppet, som innebär att fordonet sladdar
runt, går med bakvagnen före ruxi i diket och efter en
kraftig stöt befinner sig vid nedre delen av
innerslän-ten vid t = 8,00 sek. Till skillnad mot sektion 1A välter
inte fordonet, när det delvis passerar diket igen.
Sektion 2A
När fordonet har hastigheten 96 km/h och
avkörningsvin-keln 200 är minst ett hjul i kontakt med marken vid
pas-sagen av innerslänteni Höger framhjul tar mark vid
t = 0,70 strax efter att det passerat diket. Nedslaget
ger en normalkraft av 115 400 N och en resulterande
aooe-leration eur 5,47 g. Resultaten därefter än* tveksamma
dels därför att chassiehörnet (höger fram) har trängt ned 19 om i marken, dels p g a att stöten troligen ger skador
på framvagn/hjul. Om man bortser från detta blir följden
av stöten att fordonet vrider sig och sladdar uppför
yttersläntenw 'En kraftig stöt (resulterande
accelera-tion : 7,50 g) blir följden, när vänster bakhjul
passe-rar diket efter en kort luftfärd. Höger bakhjul passerar
först yttersläntens krön, följt zur övriga hjul. Vid
t = 2,05 sek har hela fordonet passerat krönet och fort-sätter in; i periferin Lüäui att några anmärkningsvärda krafter uppträder.
När avkörningsvinkeln är 70 blir påkörningarna små
jäm-fört med ovan. Hjulen är hela tiden i kontakt med marken
tills höger framhjul når ytterslänten (t = 1,70). Efter
stöten kastashöger framhjul upp i luften, medan fordonet
vrider sig något och sladdar uppför ytterslänten.
Chas-siehörnet tränger ned 0 5 om vid stöten, vilket sannolikt
ej påverkar resultaten. Yttersläntens krön nås ej, utan
fordonet ändrar riktning ned mot diket igen och kontaktar
innerslänten vid t.Rä 4,0 sek. Därefter rullar/sladdar
fordonet framåt i diket ibland på ytterslänten, ibland på
innerslänten. Inte någon gång registreras en
resulte-rande acceleration över 1 g.
Sektion 2B
Vid kombinationen 90 km/h och 200 vinkel, fås samma
re-sultat som för sektion 2A fram till strax efter kontakten
med ytterslänten (se ovan). När höger framhjul tar mark
efter den korta luftfärden, sker detta något kraftigare
jämfört med sektion 2A. Nedslaget sker precis där
ytter-slänten ändrar lutning från 1:4 till 1:2 och stöten rik-tas så att fordonets rollrörelse ökar, vilket medför att fordonet välter (t = 1,8M sek) innan det nått
ytterslän-tens krön.
Vid 70 avkörningsvinkel kommer fordonet att stanna i
di-ket. Förloppet överensstämmer i stort sett med det som
erhölls för sektion 2A. Rollvinkelns maxvärde är dock
något mindre, medan en kraftigare stöt mot vänster
bak-hjul uppträder mot slutet av simuleringen. Denna ger den resulterande accelerationen 3,33 g.
Sektion 3A
Hastigheten 96 km/h och vinkeln 20O medför att höger
framhjul når ytterslänten vid t = 0,80 sek.
Dessför-innan är alla hjul i kontakt med marken i stort sett hela
tiden. Stöten mot ytterslänten ger en resulterande
acce-leration av 6,85 g och hjulet kastas upp i luften under en kort tidsrymd samtidigt som fordonet sladdar något.
Vid t = 0,95 sek passerar båda vänsterhjulen diket
vil-ket resulterar i en acceleration av 9,40 g (och
normal-kraften 158 300 N på vänster bakhjul. Främre högra
chas-siehörnet anges tränga ned 0 12 cm i marken, vilket kan-ske inte påverkar kan-skeendet (beror av markförhållanden), och bakre vänstra drygt 20 om vilket sannolikt har
bety-delse. Därefter fortsätter fordonet uppför slänten och
har passerat släntkrönet vid t = 2,0 sek. Vid denna
pas-sage är hjulen i luften under kort tid, men nedslagen ger
mindre påkänningar än tidigare. Fordonet ändrar kurs i
mycket liten utsträckning och avlägsnar sig längre och
längre från vägbanan.
Avkörningsvinkeln 7O resulterar i att höger framhjul når
ytterslänten vid t : 2,00 sek. En smärre stöt uppstår
och kursen ändras, så att fordonet aldrig når
ytterslän-tens krön, utan rullar nedan/framåt i diket, ett litet
stycke upp på innerslänten, tillbaka igen osv. Inte vid
något tillfälle registreras anmärkningsvärda krafter och samtliga hjul har hela tiden markkontakt.
Sektion 3B
FörlOppet vid 96 km/h och 200 överensstämmer med det som ovan redovisats för sektion 3A fram till strax efter
stö-ten mot ytterslänstö-ten. P g a att övergången till
lut-ningen 1:2 sker senare (jämfört med 3A) hinner fordonets
rollvinkel öka så mycket att kontakten med denna
lut-ningsövergång gör att fordonet välter vid t = 2,25 sek.
Användningen av '#3 avkörningsvinkel medför :i huvudsak
samma förlOpp som för sektion 3A. Vid t = 7,80 sek anges
dock att bakre vänstra chassiehörnet befinner sig 20 om under marknivå, vilket torde påverka beteendet därefter.
Sektion 30
När fordonet kör nedför innersläntenmed 96 km/h och
vin-keln 20° har hjulen markkontakt i stort sett hela tiden.
När höger framhjul når ytterslänten (t = 0,75-0,80) upp-träder mycket stora krafter (186 700 N vid höger
fram-hjul), vilket ger en resulterande acceleration av som
högst 23,61 g. Påkänningen är så stor att fordonet
sann-olikt deformeras. Dessutom anges att chassiehörnet
be-finner sig drygt 30 om under marknivå. Oberoende av
detta, utsäger programmet att fordonet välter vid
t = 0,81 sek.
Vid avkörningsvinkeln 7O klarar fordonet av kontakten med ytterslänten med den resulterande accelerationen 5,64 g
(t = 1,95).
Därefter sladdar fordonet uppför
ytterslän-ten, samtidigt som en viss vridning mot vägen sker.
Yttersläntens krön nås aldrig, utan fordonet kommer så
småningom att stanna i diket. Inga större krafter
uppträ-der unuppträ-der den senare delen av simuleringen. Sektion HA
Vid 96 km/h och vinkeln 20° gör den kraftiga
släntlut-ningen (1:3) att hjulen tappar markkontakt när fordonet
kör ut över innerslänten. Fordonet blir dock inte helt
luftburet vid något tillfälle. Höger framhjul tar mark
på ytterslänten, vilket får svåra konsekvenser. Den
re-sulterande accelerationen registreras till 26,89 g (vid
normalkraften 298 30011 vid höger framhjul). Sannolikt
deformeras fordonet. Dessutom anges chassiehörnets
po-sition till 25 om under marknivå. I praktiken innebär
detta att hörnet, ej hjulet först träffar ytterslänten. Programmet räknar ej med detta, utan anger att fordonet välter när det när yttersläntens krön (t = 2,16 sek). AvkörningsförlOppet blir lugnare med vinkeln 70. Höger
framhjul når ytterslänten vid t = 1,60 sek (resulterande
aocelerationen = 2,43 g, chassiehörnet 1h om under
mark-nivå). Därefter sladdar fordonet uppför ytterslänten och
ned i diket igen och träffar innerslänten. Detta medför
aocelerationen 5,51 g. Fordonet fortsätter därefter
framåt i diket, men välter inte och är hela tiden
för-hållandevis kursstabilt. Sektion 4B
Vid kombinationen 96 km/h och 200 vinkel är enda skill-naden jämfört med sektion MA att fordonet välter något
tidigare (t : 1,95 sek). I övrigt överensstämmer
för-loppet med ovanstående.
Även vid avkörningsvinkeln 1%) fås god överensstämmelse
med sektion MA. Stöten när höger framhjul når
ytterslän-ten är av samma storleksordning, men en kraftigare stöt (resulterande accelerationen = 3,09 g) fås när fordonet
når yttersläntens lutningsövergång. Därefter sker
inget, jämfört med ovan, som motiverar ytterligare
an-märkningar. VTI RAPPORT 203
.1.
IêPêllêêQQêEêEållEÅEå:-ÃQEQêEäEEÃQEêE
Resultaten av de simuleringar där fordonet kört av vägen med avkörningsvinkeln 200 och hastigheten 96 km/h
sam-manfattas i tabellerna M och 5. I tabell u anges
accele-rationer och skaderiskindex, medan tabell 5 visar
ex-tremvärden för normalkrafter och stabilitetskvot (enligt
avsnitt M.M) samt resultat rörande fordonets kontakt med
marken. Figurer utvisande resulterande acceleration
(toppvärden och medelvärde över 0,4 sek) och de främre
chassiehörnens position i förhållande till markytan vid
olika tidpunkter visas i bilagorna 3 reSpektive M.
Figu-rerna kan identifieras genom den identifikation, som
finns i tabellerna.
VTI RAPPORT 203 Ta be ll 4. 96 km /h oc h 200 avk ör ni ng svi nkel Ac ce le ra ti oner oc h Sk ad er is ki nd ex vi d avk ör ning ss im ul er in g i jo rd sk är ni ng ar Se k-ti ons-
typ
Id en ti -fi ka -ti on F o r -d o n s -tY P: ko n-tr ol l m m Si mul e-ri ng sd ata Re sul te ra nd e ac ce le ra ti on 2) Ac ce le ra ti on er (m v Öve r 0, 05 se k) oc h Skad er is k-in de x (s i) vi d ol ika ti de r Si mul e-ri ng s-ti d (s ek) Ti ds -in te r-va ll (s ek ) T0 pp vär de (g -e nh et er ) Me de lvär de öve r 0, 4 se k (g -e nh et er ) t (s ek ) lo ng (g -e nh ) la t (g -e nh ) ve rt (g -e nh ) 51 3) K o m m e n t a r lA /l BA vk 2 11)
1,
09
0,
01
8,
83
(t
=0
,8
2)
13
,5
0(
t=
0,
92
)
20
,3
7(
t=
l,
05
)
27
,1
3(
t=
l,
08
)
2, 17 (t =0,7 6)3,
18
(t
=0
,8
8)
-1
,6
5
-l
,9
6
-l
,2
8
_3
,0
9
_4
,4
6
-0
,4
6
-1
,4
9
-4
,5
1
-l
l,
89
Prog ra mm et br öt si mul e-ring en vi d t= l, 09 , sa nnol ik t p g aat t fo rd on et väl te r. 2A /2 BA vk 2 31)
1,
50
0, 015,
47
(t
=0
,7
0
7,
50
(t
=0
,8
6)
0,
85
(t
=0
,6
0)
l,
lZ
(t
=0
,7
4)
0,
95
(t
=l
,0
6)
.-0
,97
_0
,2
4
-l ,4 6 +0 ,6 7 Vi d fo rt sa tt si mul erin g ha r al la hj ul pa ss er at yt te rs län -te ns kr ön vi dt= l, 70 (s ek ti on . 2A), me da n fo rd on et väl te r vi d t= 1, 84 oc h se kt io n ZB . 3A /3 BA vk 2 51)
1, 50 0, 016,
85
(t
=0
,8
0)
9,
40
(t
=0
,9
5)
l,
95
(t
=0
,8
0)
2,
01
(t
=0
,9
8)
-0
,6
0
-1
,2
5
_0
,7
9
+1
,6
7
Fo rt sa tt si mul er in g ge rat t al la hj ul pa ss er at yt te rs län -te ns kr ön vi d t= 2, 00 . Vi d se kt io n 3A fo rt sät te r fo rd o-net där ef te r, m e d a n se kt io n 3B me df ör väl tn in g(t =2 ,2 5) . 3 C A vk 2 71)
0,
81
0,
01
23
,6
l(
t=
0,
77
)
l9
,3
6(
t=
0,
79
)
2,
13
(t
=0
,6
0)
0,
78
-2
,0
5
-4
,8
2
Pr og ra mm et br öt si mul e-ri ng en vi d t= 0, 8l sa nn ol ik t p g a at t fo rd on et väl te r. 4A /4 BAvk 29
1)
1,
50
0,
01
15
,4
0(
t:
0,
66
)
26
,8
9(
t=
0,
7l
)
2,
28
(t
=0
,5
6)
2,
64
(t
=0
,8
5)
-2
,3
1
_2
,2
2
_3
,7
4
-4
,1
0
Fo rt sa tt si mul er in g ge rat t yt te rslän te ns kr ön nås vi d t= c 2, 00 . Där ef te r väl te r fo rd on et . l) Fo rd Gala xi e, fr i rul ln ing oc h st yr ni ng Fr ik ti on : 0, 7 (väg ) oc h 0, 35 (s id out rym me ) 2) Se äve n bi la ga 3. 3) Sk ad er is ki nd ex en li gt avs ni tt 4. 437
VTI RAPPORT 203 Ta be ll 5. Kr af te r, st ab il iåe t oc h ma rk ko nt ak t vi d avk ör ni ng svi nk el ij or ds kär ni ng ar 96 km /h oc h 20 avk ör ni ng svi nk el Se k-ti on s-'CYP Id en ti -fika -ti on Fo r-do ns -typ , ko n-tr ol l m m Si mul e-ri ng sd at a In ge n ko nt ak t me d ma rk en för re sp ekti ve hj ul vi d ti de n t (s ek ) 1 Si mul e ri ng s-ti d (s ek) va ll Ti ds -in te r-(s ek ) Hög er f r a m Vän st er f r a m H ög er ba k H Ög er ba k Al la fyr a hj ul en ut an m a r k -ko nt ak t vi d ti de n t 1 -t 2 St ab il i-te ts kvo t 2) M a x kr af te r, no rm al a m o t ma rk yt an , för re sp hj ul (N ewt on ) Re sp ch assi e-hör ns mi ns ta
fr
ia
höj
d
re la ti vt ma rk yt an (c m)3)
lA /l B A k a l l)4)
1,
09
0,
01
0,
34
-0
,7
5
0,
91
-0,
56
-O
,9
7
0,
47
-0
,4
8
O,
55
-O
,8
2
1,
02
-1
,0
4
0,
60
-O,
60
-O
,7
5
O,
51
(t
=0
,8
7)
HF : 21 0 20 0 VF : 16 2 40 0 HB : 31 1 00 0 VB : 51 00 Uppg if t sa kn as 2A /2 B Avk 231)
1,
50
0,
01
O,
42
-0
,5
8
0,
87
-0
,9
7
l,
O6
-l
,0
7
1,
45
-0,
58
-0
,7
9
1,
19
-1
,2
1
1,
31
-1
,3
2
0,
63
0,
94
-O,
6l
-O
,7
3
0,
96
-Al dr ig0,
57
(t
=0
,9
1)
H F : V F : 11 5 40 0 10 60 0 54 20 0 88 90 0 H F : -1 9 VF : > 0 H B : -3 6 VB : > 0 3A /3 B Avk 25 1)1,
50
0,
01
0,
47
0,
93
-0
,9
4
1,
47
-0,
68
0,
78
1,
12
-l
,4
8
1,
03
-1
,1
3
1,
21
-1
,2
2
O,
63
-O
,6
4
l,
06
-l
,3
8
Al dr ig0,
44
(t
=0
,9
7)
0,
60
(t
=l
,5
0)
91 60 0 47 90 0 17 00 0 15 8 30 0 H F : -1 2 VF : > 0 H B : > 0 V B : -2 4 3C Avk 271)
'0
0,
81
0,
01
0,
47
0,
68
0,
76
-Al dr ig0,
63
-O
,6
4
Al dr ig 0 , 2 3 ( t = 0 , 7 4 ) 18 6 70 0 6 20 0 6 70 0 5 50 0 H F : -3 3 V F : > 0 H B : > 0 V B : > 0 4A /4 B Avk 291)
1,
50
0,
01
0,
34
-0
,5
5
0,
76
-0,
56
-0,
47
O,
55
-O
,6
3
0,
74
-0
,7
7
0,
86
O,
60
-0
,7
l
0,
90
-0,
90
-0,
91
(t
:0
,8
5)
HF : 29 8 30 0 7 10 0 19 20 0 98 10 0 H F : -2 5 VF : > 0 H B : -56 VB : > 0 l) Fo rd Ga la xi e, fr i rul ln in g oc h st yr ni ng Fr ik ti on : 0, 7 (väg ) oc h 0, 35 (s id out rym me ) 2) En li gt avs ni tt 4. 4 3) Se äve n bi la ga 4 4) Si mul er in ge n br öt s; sa nn ol ik t p g a fo rd on et s väl tn in g 38Motsvarande resultat för hastigheten 96 km/h och vinkeln
70 ges i tabellerna 6 och 7. För dessa simuleringar har
inte några plottfigurer tagits med i bilagorna.