VTI meddelande 858 • 1999
Avståndshållning i
tätorts-korsningar
En modell
VTI meddelande 858 · 1999
Avståndshållning i tätortskorsningar
En modell
Utgivare: Publikation: VTI meddelande 858 Utgivningsår: 2000 Projektnummer: 40234 581 95 Linköping Projektnamn: Avståndshållning i tätortskorsningar En modell Författare: Uppdragsgivare:
Göran K Nilsson Aruhsell Kommunikationsforskningsberedningen (KFB)
Titel:
Avståndshållning i tätortskorsningar – En modell
Referat
Denna undersökning syftar till att få ökade kunskaper avståndshållning i tätortskorsningar. Efter-som de flesta upphinnandeolyckorna inträffar här är denna kunskap viktig för trafiksäkerheten och framkomligheten.
En förstudie gjordes i form av litteraturstudier. Huvudundersökningen gjordes genom egna mät-ningar med trafikanalysator och videofilmning.
Dels studerades hindrade fordon ur den totala trafiken som närmade sig korsningen, dels valdes två grupper av hindrade for-don ut, som hade framför sig ett fordon som antingen svängde åt höger eller körde rakt fram.
Fyra korsningar valdes ut. Två med trafikljus och två utan. I tre av korsningarna rådde hetsbegränsningen 50 km/h. I den fjärde, som var en av korsningarna med trafikljus, var hastig-hetsbegränsningen 70 km/h. Tidluckorna mättes i fyra snitt motsvarande 0, 2, 4 och 6 sekunder före korsningen för ett fordon med en hastighet lika med hastighetsgränsen. Mätningarna pågick i två dygn. Videofilmning gjordes under rusningstrafik för senare identifiering av fordonens beteen-den. För att göra en studie av den ”successiva” förändringen gjordes en särskild studie genom video-filmning, där tidluckan beräknades var femte meter.
För totala trafiken under två dygn, ligger medelvärdena för hindrade fordon (tidlucka < 5 sek.) mellan 2,2 och 2,7 sekunder. De två gatorna med trafikljus uppvisar en minskning av tidluckan, medan gatorna utan trafikljus har en ökning av tidluckan. Tidluckefördelningen är minst lite före korsningarna utan trafikljus och närmast korsningarna med trafikljus.
En regressionsanalys visar positivt samband mellan tidluckan och avståndet till korsningen. Tid-luckans 5-percentil ökar för tre korsningar.
Vid undersökningen av den successiva tidluckeförändringen framkom att fordon som hindras av högersvängande minskar sin tidlucka från ca 20 meter före korsningen. Fordon som hindras av raktframkörande har ungefär lika stor tidlucka under hela den studerade sträckan.
Publisher: Publication: VTI meddelande 858 Published: 2000 Project code: 40234
S-581 95 Linköping Sweden Project:
Distance keeping at urban junctions – A model
Author: Sponsor:
Göran K Nilsson Aruhsell Swedish Transport and Communications Research Board (KFB)
Title:
Distance keeping at urban junctions – A model
Abstract
This investigation aims at increasing knowledge of distance keeping at urban junctions. Since these are where most rear end collisions occur, such knowledge is important for traffic safety and trafficability.
A pilot study was conducted in the form of literature studies. The main investigation was performed through of impeded vehicles measurements with a traffic analyser and video filming.
A study was made of the total traffic approaching the junction and also of two selected groups of impeded vehicles. The impeded vehicles were following a vehicle that either turned right or proceeded straight ahead.
Four junctions were selected, two with traffic lights and two without. At three of the junctions, there was a speed limit of 50 km/h. At the fourth junction, which was one of those with traffic lights, the speed limit was 70 km/h. The time gaps were measured at four points corresponding to 0, 2, 4 and 6 seconds before the junction for a vehicle with a speed equal to the speed limit. The measurements were carried out over a period of two days. Video filming was performed during rush-hour traffic for later identification of vehicle behaviour. In order to study the “successive” change, a special study was carried out through video filming where the time gap was calculated for every five meters.
For total traffic over two days, the mean values for impeded vehicles (time gap < 5 sec) were between 2.2 and 2.7 seconds. The two roads with traffic lights show a decrease in the time gap, while the roads without traffic lights show an increase. The time gap distribution was shortest just before the junctions without traffic lights and nearest the junctions with traffic lights.
Regression analysis shows a positive relation between the time gap and distance to the junction. For three junctions, the 5-percentile for the time gap increases.
When investigating the successive change in time gap, it was found that vehicles impeded by others turning right reduce their time gap from about 20 metres before the junction. Vehicles impeded by others proceeding straight ahead have approximately the same time gap all the way on the section studied.
Förord
Föreliggande undersökning kan ses som en fortsättning på tidigare gjorda under-sökningar på temat –Avståndshållning i trafiken. Först gjordes– Undersökning av vad som kan anses vara för kort avstånd – sedan en undersökning kallad – Av-ståndshållning, information och övervakning.
Dessa föregående projekt har finansierats av KFB respektive Vägverkets skylt-fond.
I detta projekt är åter KFB – Kommunikationsforskningsberedningen finansiär. Bakgrunden till igångsättandet av detta projekt är att vi hittills vet för lite om av-ståndshållningen nära och i korsningar.
Stort tack till följande personer: Hans Erik Pettersson, Gabriel Helmers, Gunnar Andersson och Ulf Hammarström som hjälpt till vid planering och upp-läggning av projektet, till Irena Koronna Vilhelmsson, Sven-Olof Lundkvist, Mats Wiklund, och Uno Ytterbom för hjälp med planering och databehandling samt till Arne Carlsson och Lena Nilsson för granskning av meddelandet.
Linköping december 2000
Göran K Nilsson Aruhsell Projektledare och författare
Innehåll
Sid
Sammanfattning 7 Summary 9 1 Bakgrund 13 2 Syfte 14 3 Teori 15 3.1 Tidluckor 15 3.2 Distraktionsfaktorer 17 4 Metod 18 4.1 Förstudie 184.2 Tidluckemätning i snitt före korsning 18
4.3 Tidluckemätning kontinuerligt in mot korsning 19
4.4 Distraktionsbedömning 19
5 Förstudie 20
6 Undersökning 27
6.1 Beskrivning av mätplatser 27
6.2 Mätprocedur 32
6.2.1 Mätning med trafikanalysator TA-89 32
6.2.2 Mätning med trafikanalysator TA-89 och video 32
6.2.3 Mätning med enbart video 32
6.2.4 Inventering av distraktionskällor 33
7 Analys och resultat 34
7.1 Tidluckeförändringar för alla hindrade fordon under två dygn 34 7.1.1 Medeltidluckornas förändring mellan mätsnitten 34 7.1.2 Regressionsmodell för alla hindrade fordon 37 7.1.3 Tidluckefördelningarnas förändring mellan mätsnitten 38 7.2 Tidluckeförändringar för raktframkörande fordon
hindrade av högersvängande resp. raktframkörande fordon 40 7.2.1 Medeltidluckornas, percentilernas och spridningens
förändring mellan mätsnitten 41
7.2.2 Regressionsmodell för raktframkörande fordon hindrade
av högersvängande resp. raktframkörande fordon 50
7.2.3 Hastigheter under rusningstrafik 51
7.3 Kontinuerliga tidluckeförändringar 53
7.4 Distraktionskällor 55
8 Slutsatser och diskussion 60
9 Referenser 62
Bilaga 1 Exempel på datautskrift efter TA89-mätning
Bilaga 2 Identifiering av fordon med avseende på körbeteende från videofilm. Bilaga 3 Beräkning av tidluckor för identifierade fordon i de 4 mätsnitten. Bilaga 4 Beräkning av tidluckor för identifierade fordon för var 5:te meter.
Avståndshållning i tätortskorsningar – En modell
av Göran K Nilsson Aruhsell
Statens väg- och transportforskningsinstitut (VTI 581 95 Linköping
Sammanfattning
Undersökningen syftar till ökad kunskap om avståndshållning mellan fordon i trafiken. Ökade kunskaper om körbeteende i korsningar, speciellt med av-seende på tidluckor, är viktigt för att kunna vidta åtgärder för att förbättra säkerheten och framkomligheten i trafiken.
Tidigare har avståndshållning på landsväg och i tätort undersökts på sträcka. I denna undersökning är syftet att studera avståndshållningens förändring när fordon närmar sig en tätortskorsning, där de flesta upphinnandeolyckor inträffar.
Hypotesen är att när en bil närmar sig en korsning så kommer tidluckan att minska till framförvarande bil när bilarna saktar in. Denna process skulle kunna beskrivas med en modell.
Projektet indelades i två faser: en förstudie och en huvudundersökning.
Förstudien gjordes i form av en litteraturstudie av andra undersökningar gjorda i tätortskorsningar.
Huvudundersökningen gjordes genom trafikmätningar med VTI:s mätsystem TA-89 som användes för att beräkna tidluckor genom axel- och tidsregistreringar med trafikanalysator samt genom videofilmning med tidtagning.
Förutom att studera den totala trafiken söktes två typiska körbeteenden för fordon i följesituation. Det blev följande:
• Fordon som kör rakt fram och hindras av ett framförvarande fordon som skall svänga åt höger. Betecknas: ”H-R”
• Fordon som kör rakt fram och hindras av ett framförvarande fordon som också skall köra rakt fram. Betecknas: ”R-R”
Fyra korsningar i tätort valdes ut. Två med trafikljus och två utan. En av kors-ningarna med trafikljus hade hastighetsbegränsningen 70 km/h i det studerade benet, de andra tre 50 km/h. Samtliga hade en gemensam fil både för de som körde rakt fram och de som svängde höger.
Först mättes med trafikanalysator i fyra snitt före korsningen i ett av de in-gående benen. Dessa snitt lades på avstånd som motsvarade 0, 2, 4 och 6 sekunder före korsningen för en bil med hastighet enligt hastighetsgränsen. Dessa mätningar pågick i 2 dygn. Under tiden videofilmades rusningstrafiken vid ett par tillfällen. Från videofilmen kunde sedan plockas ut vilka fordon som hindrades av dels de som svängde åt höger respektive de som körde rakt fram.
Därefter gjordes en ny videofilmning med tidtagning i en av korsningarna. Var femte meter markerades med en träkäpp för att från filmen kunna göra en beräk-ning av tidluckans successiva förändring.
För trafiken under 2 dygn ligger medelvärdena för hindrade fordon för alla korsningarna och alla mätsnitt mellan 2,2 och 2,7 sekunder. De två gatorna med
trafikljus uppvisar en minskning av tidluckan närmare korsningen, medan gatorna utan trafikljus uppvisar en ökning av tidluckan närmare korsningen. Hastigheten däremot minskar närmare korsningen för alla fyra platserna
Fördelningskurvorna visar att den minsta tidluckespridningen uppträder lite före korsningen utan trafikljus och närmast korsningen med trafikljus.
En regressionsekvation anpassad till mätdata från alla fyra korsningarna visar ett positivt samband mellan tidluckan och avståndet till korsningen och ett svagt negativt samband till hastigheten.
T = 2,68 – 0,008*v + 0,0162*S , r = 0,43
där: T medeltidluckan (sek)
v medelhastigheten i aktuellt mätsnitt (km/h) S mätsnitt (sek från korsningen, baserat på skyltad
hastighet)
r korrelationskoefficienten
Under rusningstrafik studerades enbart hindrade fordon som identifierats. Då blev medelvärdet för tidluckorna mindre än för den totala trafiken. De låg mellan 1,98 och 2,60 sekunder. Här uppvisas en minskning av tidluckorna för alla fyra gatorna närmare korsningen. Dock avviker Gamla Tanneforsvägen genom att minsta tid-luckan uppträder i näst sista snittet före korsningen. Följande regressions-ekvationer är anpassade
-till första kategorin, ”H-R”:
59
,
0
,
043
,
0
17
,
2
+
⋅
=
=
S
r
T
-till andra kategorin, ”R-R”:
43
,
0
,
029
,
0
25
,
2
+
⋅
=
=
S
r
T
Båda ekvationerna visar att man finner de kortaste tidluckorna närmast korsningen.
Däremot så ökar 5-percentilen för tidluckan i samtliga korsningar utom en. Hastigheterna minskar närmare korsningen för alla platser.
Vid undersökningen av den successiva tidluckeförändringen visade det sig att
• bilarna som hindras av högersvängande håller ungefär konstant tidlucka till ca 20–30 meter före korsningen sedan minskar den
• bilarna som hindras av bilar som kör rakt fram har ungefär lika stor tidlucka under hela den studerade sträckan, men för några ökas den strax före korsningen då bil 1 ökar hastigheten.
Slutligen gjordes en inventering för att kartlägga trafikmiljön avseende distrak-tionsfaktorer.
Distraktionskällor inventerades för varje mätplats. På mätplatserna fanns bland annat in- och utfarter som kan verka störande. Stora reklamskyltar fanns också
Distance keeping at urban junctions – A model
by Göran K Nilsson Aruhsell
Swedish National Road and Transport Research Institute SE-581 95 Linköping Sweden
Summary
The investigation aims at increasing knowledge of distance keeping between vehicles in traffic. Detailed knowledge of driving behaviour at junctions, particularly with regard to time gaps, is important for being able to imple-ment measures to improve traffic safety and trafficability.
Previously, distance keeping on main roads and in urban areas has been investigated on sections without junctions, etc. In this investigation, the purpose was to study the change in distance keeping when vehicles approach an urban junction, where most rear end collisions occur.
The hypothesis is that when a car approaches a junction, the time gap to the leading vehicle will decrease when the cars slow down. It should be possible to reproduce this process with the aid of a model.
The project was divided into two phases, a pilot study and a main investigation. The pilot study was carried out in the form of a literature survey of other investigations of urban junctions.
The main investigation was performed through measurements with the Institute’s TA-89 measuring system, which was used to calculate time gaps through axle and time recordings with a traffic analyser and through video filming with time recording.
In addition to studying the total traffic, a study was made of two typical types of driving behaviour involving vehicles following each other. These were:
• Vehicles proceeding straight ahead which are impeded by a leading vehicle turning right. Designated “H-R”
• Vehicles proceeding straight ahead which are impeded by a leading vehicle also travelling straight ahead. Designated “R-R”
Four junctions in urban areas were chosen, two with traffic lights and two without. One of the junctions with traffic lights had a speed limit of 70 km/h on the studied arm, while the others had a speed limit of 50 km/h. All junctions had a common lane for vehicles proceeding straight ahead and those turning right.
First, measurements were made with the traffic analyser at four points before the junction on one of the arms studied. These points were located at distances corresponding to 0, 2, 4 and 6 seconds before the junction for a car with a speed equal to the speed limit. These measurements were carried out over a period of two days. During this time, rush-hour traffic was video filmed on a number of occasions. The video film was used to select vehicles impeded by those turning right and those vehicles proceeding straight ahead.
Further video filming was then performed with time recording at one of the junctions. Marker sticks were placed at 5-meter intervals in order to calculate the successive change in time gap in the film.
For traffic over a period of two days, the mean values for impeded vehicles at all junctions and all measuring points were between 2.2 and 2.7 seconds. The two roads with traffic lights show a decrease in the time gap with decreasing distance to the junction, while the roads without traffic lights show an at first decrease then a increase in the time gap with decreasing distance to the junction. However, the speed approaching the junction decreases for all four locations.
The distribution curves show that the smallest time gap dispersion appears just before the junction without traffic lights and nearest the junction with traffic lights.
A regression equation adapted to data from all four junctions shows a positive relation between time gap and distance to the junction, and a weak negative rela-tion to speed.
T = 2.68 – 0.008*ν+ 0.0162*S , r = 0.43
Where: T: average time gap (sec.)
ν: mean speed at the particular measuring point (km/h)
S: measuring point (sec from the junction, based on
displayed speed limit
r: correlation coefficient
During rush-hour traffic, only those impeded vehicles that were identified were studied. The mean value for the time gap was then smaller than for the total traffic. The gaps were between 1.98 and 2.60 seconds. A decrease in the time gap is seen on all four roads with decreasing distance to the junction. However, one road, “Gamla Tanneforsvägen”, deviates in that the smallest time gap appearing at the second to last point before the junction. The following regression equations are adapted
• to the first category, “H-R”:
T = 2.17 + 0.043 . S, r = 0.59
• to the second category, “R-R”:
T = 2.25 + 0.029 . S, r = 0.43
Both equations show that the shortest time gaps are found nearest the junction. However, the 5-percentile for the time gap increases at all junctions except one. At all locations, speeds decrease with decreasing distance to the junction.
When studying the successive time gap change, it was found that:
• cars impeded by others turning right keep an approximately constant time gap until about 20–30 metres before the junction and then reduce the gap
1
Bakgrund
I Sverige har vi sedan omläggningen till högertrafik 1967, och den satsning på trafiksäkerhet som gjordes då, en nedåtgående trend vad det gäller trafikolyckor. Denna trend gäller trafikolyckor totalt sett. Tittar man närmare på olika olycks-typer så finner man trots detta att det är en typ som ökar, och det är upphinnande-olyckorna.(GK Aruhsell 1997)
Förutom den officiella statistiken som bygger på polisrapporterade olyckor, sker med all sannolikhet många upphinnandeolyckor i tätort som inte blir an-mälda. Eftersom skuldfrågan oftast är okomplicerad blandas inte polis in. Om större materiella skador eller personskada uppstår är sannolikheten större att upp-hinnandeolyckan anmäls till försäkringsbolag. Det är vanligt med pisksnärtskador vid upphinnandeolyckor, men det kan vara besvärligt att bevisa att skadans ur-sprung. Trots att det är svårt att få ut ersättning för pisksnärtskada står dock dessa för en betydande del av försäkringsbolagens utbetalningar.
I SCBs statistik över trafikskador 1997 kan bland annat följande utläsas.(SCB 1997):
• Bland alla personskadeolyckor är andelen av typen upphinnande ca 10%.
• Om man bara ser på personskadeolyckor mellan fordon som är av typen upp-hinnande är andelen ca 26% 1997. För 1975 var denna andel endast 10%, vilket således visar på en betydande ökning. Antalsmässigt är det ungefär en tredubbling.
• De flesta upphinnandeolyckor inträffar inom tätbebyggt område, ca 61%.
• På landsbygd sker de flesta upphinnandeolyckorna på 70-väg och därefter på 90-väg.
• Upphinnandeolyckor resulterar sällan i dödsfall eller svåra personskador. Sex personer dog i sådana olyckor 1997.
• De flesta upphinnandeolyckorna sker strax före en korsning* (GK Aruhsell 1997).
Upphinnandeolyckorna antas till stor del bero på att förarna håller för korta av-stånd. Även andra olyckstyper kan delvis ha sin grund i för korta avav-stånd. Om framförvarande fordon bromsar häftigt kan föraren efter t.ex. göra en undanman-över och köra på något annat. Om han styr åt vänster kan han krocka med ett mötande fordon vilket kan registreras som mötesolycka. Styr han åt höger och hamnar i diket kan olyckan bli registrerad som singelolycka.
En annan faktor som kan medverka till upphinnandeolyckor är distraktion hos bilföraren.
*
• cars impeded by others proceedings straight ahead have approximately the same time gap throughout the studied section, but for some the gap increases just before the junction as car 1 increases speed.
Finally, an inventory was made to survey the traffic environment with regard to distraction factors.
Sources of distraction were inventoried for each measuring location, where there were entrances, exits, etc that could be distracting. There were also large advertising hoardings that could distract attention from the traffic.
2
Syfte
Flera kampanjer och försök har genomförts och pågår för att påverka avstånds-hållningen.
I Värmland har trafiksäkerhetsförbundet drivit en kampanj för tre-sekunders-regeln i samarbete med Länsförsäkringsbolaget och norska försäkringsbolaget Gjensidige.
I Bohuslän har polisen övervakat avståndshållningen med hjälp av video och gjort ingripanden.
I Göteborgsområdet har Vägverket gjort försök på motorväg med vinklar målade i vägbanan. Genom skyltar uppmanades förarna köra så de hade minst tre vinklar mellan sig och bilen framför.
I Stockholmsregionen har Vägverket utfört en omfattande kampanj med av-ståndsmarkeringar i vägbanan och med elektroniska skyltar på flera olika vägar bland annat E4 både norr och söder om Stockholm (Rydén o Englund 1999).
I Linköping har vi på VTI tidigare genomfört ett försök i tätort med vinklar målade på vägbanan och med uppmaningen att ha minst två vinklar mellan den egna bilen och framförvarande fordon, motsvarande två sekunder vid färd i hastig-hetsgränsen (Aruhsell GKNilsson 1997). Dessutom sattes en elektronisk tavla upp som visade tidluckorna mellan passerande bilar och varnade de förare som höll mindre tidlucka än två sekunder med ett blinkljus. På landsväg gjordes ett försök med att använda vägkantstolpar som avståndsmått.
Resultaten visade på störst effekt för den elektroniska skylten. Ingen effekt på tidluckorna kunde påvisas vid mätningar några hundratal meter efter försöks-sträckorna. Undersökningen utfördes på uppdrag av Skyltfonden.
Syftet med detta projekt är att öka kunskapen om avståndshållningen i den miljö, nära och i vägkorsningar, där de flesta upphinnandeolyckorna sker. Detta kan uppnås genom att göra tidluckemätningar på olika avstånd före tätortskors-ningar. Finns det en typisk modell för tidluckeförändringen för bilar som närmar sig en korsning eller finns det kanske flera modeller?
En modell skall kunna beskriva tidluckorna på olika avstånd från korsningen beroende av olika ageranden vid olika hinder i korsningen.
3
Teori
3.1 Tidluckor
De teoretiska utgångspunkterna för beskrivning av tidlucka finns bland annat be-handlade i state-of-the-art-studien ”Tidluckor i landsvägstrafik. En problem-studie” (Nilsson GK, 1993).
Metoder för mätning och analys av tidluckor finns beskrivna i undersökningen ”Tidluckor i landsvägstrafik 1987-1991” (Nilsson GK, 1994). I ”Avståndshåll-ning. Undersökning av vad som kan anses vara för kort avstånd” (Aruhsell GKNilsson, 1995) har tidluckor beräknats för olika kritiska situationer.
Vi har genom olycksstudier funnit att de flesta upphinnandeolyckor sker i ett område på sträckan närmast före och i vägkorsningar (Aruhsell GKNilsson 1997). Resultaten från dessa egna tidigare undersökningar samt det som inhämtats genom litteraturstudien ligger till grund för denna studie. Faktorer som kan tänkas på-verka avståndshållningen är exempelvis:
I trafikmiljön • Hastighet • Väggeometri • Sikt • Korsningstyp • Väglag • Trafikflöde I bilen • Förare • Fordonstyp Hos föraren:
• Felaktig bedömning av situationen plus egen förmåga och bilens prestanda.
• Nedsatt uppmärksamhet. exempelvis: sömnighet.
• Distraktion. exempelvis: telefonerar, ställer in radio eller tittar på reklam-skyltar.
Definition
Tidlucka definieras som tiden det tar från att bakre änden på första bilen passerar en punkt tills den främre delen på efterföljande bil når samma punkt. I denna undersökning studeras den efterföljande bilens tidlucka till framförvarande.
Tankemodell / Hypotes
Antag att två fordon på en sträcka kör i en följesituation med en tidlucka på tre sekunder. Om den första föraren skall svänga, vill denne sakta in mer än vad den andra föraren vill. Hur mycket minskar då tidluckan? Korrigerar den andra föraren avståndet så tidluckan blir större igen? Fordon som skall passera rakt igenom korsningen strävar efter att bibehålla sin hastighet, medan de som skall svänga av måste sakta in och ibland stanna först. Vid korta följeavstånd fordras att bakom-varande förare snabbt anpassar sin hastighet efter den framförbakom-varande. Görs inte detta ökar risken för kollision. Risker skapas av att bilföraren gör en felaktig
be-I stadstrafik med hastighetsbegränsningen 50 km/h kan vi antaga att de flesta bilarna kör i 50 km/h. Vi studerar två fordon som kör ”efter varandra” på ett av-stånd av 25 meter. Fram till ungefär 75 meter före korsningen håller de konstant och lika fart och tidlucka och vägavstånd. Bil nummer ett kommer först fram till punkten 75 meter före korsningen och börjar då långsamt sänka farten. Om bil nummer två håller samma hastighet kommer dess tidlucka att minska tills den kommer fram till samma punkt, och därefter vara oförändrad eller till och med öka om den saktar in mera än bil ett. Tidluckan är sedan ganska stabil tills den första bilen är ca 10-20 meter före korsningen. Om det är fritt att passera kors-ningen ökar den farten. Om han måste släppa fram korsande trafik bromsar han och kanske stannar helt. I sista fasen kommer tidluckan att antingen öka igen (dragspelseffekt), eller minska.
Tidluckan mellan fordonen skulle då se ut ungefär som enligt figur 1 nedan.
Tidlucka för bil 2 (s)
Bil 1 kör rakt fram
Bil 1 svänger
100 75 50 25 0 (m)
Avstånd från korsning för bil 2
Figur 1 Hypotetisk förändring av tidluckan för hindrat fordon före en korsning.
Det är sådana händelseförlopp vi vill studera i denna undersökning. De faktorer i trafikmiljön som påverkar avståndshållningen gör naturligtvis att vi kan få flera varianter av tidluckeförändringar.
Begränsad sikt innebär förmodligen att bil två sänker sin hastighet mer och kanske oberoende av hur den framförvarande kör. I en signalreglerad korsning tillkommer inverkan av vilket ljus denna visar. Därtill är det vanligt att bil 1 och bil 2 bedömer en situation med gröngult ljus olika. Konflikt uppstår om bil ett bromsar för att stanna och bil två ökar farten för att hinna över innan det blir rött ljus. Det område inom vilket sådana situationer uppstår kallas konfliktområde eller dilemmazon. Dilemmat kan också uppstå för en ensam bilist om signalen slår om så att han inte hinner stanna innan det blir rött och inte heller hinner köra över på gröngult.
För att undersöka dessa konflikter skulle man behöva veta vilken hastighet bilen har, bilens accelerations- och retardationsegenskaper, bilförarens egen-skaper, hur lång trafiksignalens gulgröna fas är.
3.2 Distraktionsfaktorer
Många olika faktorer i trafikmiljön och förarmiljön påverkar föraren och kan vara antingen positiva eller negativa för körförmågan och säkerheten. De negativa fak-torerna kan vi kalla distraktionsfaktorer.
Positiva faktorer är exempelvis vägskyltar som hjälper föraren och visar hur han skall köra. Reklamskyltar påverkar ofta uppmärksamheten och körningen negativt.
Undantag är dock reklamskyltar som fungerar som vägvisare, t.ex. till en affär. Det kan vara negativt med för många vägskyltar om man inte hinner läsa dem. Den tid det tar att läsa eller försöka läsa en skylt är uppmärksamheten helt eller delvis flyttad från trafiken. En bra vägskylt bör därför vara så tydlig, att det tar så lite tid som möjligt att läsa och förstå den.
Dessutom kan komplicerade trafikmiljöer, med exempelvis flera in- och ut-farter samt flera trafikljus vara störande. Vädret (bländade sol, halka och mörker) m.m. kan också vara distraherande. I förarmiljön finns radio, mobiltelefon och andra instrument som kan distrahera.
4
Metod
4.1 Förstudie
Undersökningen började med en litteraturstudie för att söka efter resultat från andra studier av trafiksituationer i vägkorsningar. Bland annat studerades video-mätningar gjorda i projektet COST-319 som användes vid planeringen av mät-arrangemanget
4.2 Tidluckemätning i snitt före korsning
Vi begränsade oss till en korsningstyp där körbeteendena var lätta att kategorisera och ansågs intressant. Detta för att få tillräckligt med data. Det blev en korsnings-typ där den studerade trafiken in mot korsningen delade på samma körfält.
Den ursprungliga tanken var att studera tidluckorna i tre olika korsningar. Av skilda anledningar ändrades detta enligt följande: Fyra korsningar med rak och plan väggeometri i en tätort valdes; tre fyrvägskors och ett trevägskors. Vägen eller gatan in mot korset som studerades hade en gemensam fil för trafik rakt fram och för högersvängande trafik. Vänstersvängande trafik hade egen fil i tre fall och förekom ej i ett fall. Trafikflödet var tillräckligt stort för att trafiken skulle inne-hålla en stor andel hindrade fordon. Dock var trafiken ej så tät att de hindrade for-donen hamnade i stillastående köer.
För att undersöka hur tidluckorna förändras före en korsning valde vi att mäta i fyra mätsnitt. Varje mätsnitt utgörs av två slangar (A och B) som läggs på ett av-stånd av 3,3 meter från varandra. Fjärde mätsnittet, se tabell 1, lades precis där korsningen börjar så att ena B-slangen kom att ligga vid stopplinjen eller en tänkt sådan. A-slangen kommer då att ligga 3,3 meter före korsningen. Eftersom vi har definierat gränsen för hindrat fordon vid en tidlucka mindre än 5 sekunder valde vi att lägga mätsnittet längst från korsningen, så att ett fordon som kör enligt hastighetsgränsen har 6 sekunder kvar till korsningen. Sedan fylldes enligt denna metod i med två snitt däremellan på 4 sekunders och 2 sekunders avstånd till korsningen. Det betydde att snitten kom att ligga enligt följande modell:
Tabell 1 Mätsnittens placering i förhållande till korsningen.
Mätsnitt i kör-riktning Tidsavstånd från korsning Vägavstånd från korsning vid 50 km/h vid 70 km/h 1:a 6 sek 83,3 m 116,7 m 2:a 4 sek 55,6 m 77,8 m 3:e 2 sek 27,8 m 38,9 m 4:e 0 sek 0 m 0 m
Mätningarna av trafiken gjordes i första hand med trafikanalysatorer som mätte de passerande fordonens typ och tidluckor. För att skilja ut vilka fordon som hindras av att framförvarande svänger, användes videofilmning. Videofilmningen för-väntades även kunna avslöja kritiska punkter för avståndshållningen. Tidluckorna presenterades i form av medelvärden och fördelningar från de fyra mätsnitten.
Dessutom ville vi ha korsningar både med och utan trafikljus, samt med hastig-hetsbegränsningarna 50 och 70 km/h.
Den tidigare framtagna definitionen för hindrad trafik på tvåfälts landsväg (NilssonGK,1994)är att tidluckan skall vara mindre än/lika med 5 sekunder och hastighetsskillnaden mellan fordon skall vara mindre än/lika med ±4 km/h. Här studerar vi stadsmiljö med tätare trafik än på landsbygd och kortare avstånd kan mera antagas bero på att man vill utnyttja gatornas kapacitet än på att man är hind-rad av framförvarande. På grund av detta och att samma fordon mätes i flera punkter sätter vi här kravet för hindrat fordon som följer: Ett fordon som i alla
fyra mätpunkterna har en tidlucka som är mindre än/lika med 5 sekunder betraktas
som hindrat.
4.3 Tidluckemätning kontinuerligt in mot korsning
En videofilmning av trafiken gjordes där var femte meter upp till 70 meter från korsningen var utmärkt med en träkäpp i vägkanten. I videobilden filmades också en klocka in. För varje fordonspar i följesituation kunde tidpunkterna vid varje käpp avläsas. För det första fordonet noterades när bakkanten passerade käppen och för det andra när framkanten passerade samma snitt. På så sätt kunde 15 vär-den för tidluckan räknas fram för varje andrafordon i en följesituation. Som tidigare studerades bara situationer där första fordonet antingen kör rakt fram eller svänger åt höger och andra fordonet alltid kör rakt fram.
4.4 Distraktionsbedömning
Samtidigt görs en kartläggning av faktorer som kan verka distraherande vid kör-ningen. Sådana faktorer är t.ex. detaljer i trafikmiljön och den omgivande tra-fikens rörelser
Distraktionen kan undersökas på två olika sätt. Antingen studerar man förarens reaktioner eller också inventeras trafikmiljön och miljön närmast vägen. Att exempelvis studera förarnas huvudrörelser som först var tanken visade sig svår-genomförbart eftersom kamerautrustningen inte var lämpad för det. Därför satsades på en inventering av distraktionsfaktorer i den omgivande miljön. Grunden för inventeringen utgörs av videofilmning, fotografier och synobserva-tioner på platsen.
5
Förstudie
Denna del består av en studie av tidigare gjorda undersökningar av trafik i väg-korsningar. Av de studerade rapporterna har några kommit fram genom direkt kontakt med andra forskare. De flesta rapporterna har dock tagits fram med hjälp av litteratursökningar som gjorts av VTI:s bibliotek
Här följer en kort beskrivning av erfarenheter och resultat från de studerade rapporterna.
COST 319. European Comission, Directorate General for Transport. Bryssel.
Estimation of pollutant emissions from transport.
Rapporten är en sammanställning av studier med avseende på bland annat emis-sionsfaktorer trafikkaraktäristika och undersökningsmetoder.
Från en svensk undersökning finns data från trafikmätningar före vägkorsning som kan beskriva tidluckeförändringar. Mätningarna är gjorda dels med trafik-analysator med sensorer på vägbanan och dels genom videofilmning från väg-kanten och från luften med helikopter.
I denna undersökning studerades en trevägskorsning i stadsdelen Ryd i Linköping. Mätningar gjordes med trafikanalysator TA-89 i två snitt på varje an-slutande vägben. Dessutom videofilmades från en obemannad minihelikopter. Datautskrifter från mätningarna visade att det går att avläsa tidluckeförändringar och hastighetsförändringar. Stora bortfall av fordon kunde konstateras.
Bolling, Wiklund 1997
Validering av METOR i tätort.
Vägverkets trafikmätningssystem skulle undersökas med avseende på tillförlitlig-heten i hastighetsdata. Inom vad man kallade ”Kvalitetssäkring av Metor för hastighetsmätningar” skulle hastighetsdata insamlas med trafikanalysatorn Metor i korsningar och kurvor i tätort, dvs. på sådana ställen som var svåra att mäta på grund av frekventa accelerationer och retardationer hos trafiken. Projektet var ett samarbetsprojekt mellan Vägverket, SCB och VTI.
I slutsatsen sägs att hastighetsuppföljningar bör begränsas till den del av trafik-arbetet som inte påverkas av interaktionen med andra fordon i korsningar. Resul-taten är olika från olika platser. En enhetlig regel att exkludera 100 m före och efter en korsning föreslås. Resultatet visar alltså på svårigheten att mäta i närheten av korsningar.
Förutom studier av mätarrangemangen har härifrån en mätsträcka valts till den nu aktuella studien, nämligen Vistvägen före korsningen med Ålerydsvägen i rikt-ning från centrum.
Lee & Chen. Transportation Research Record. USA
Entering gap at signalized intersections in a small metropolitan area.
Acceptanstidluckor studerades i en liten stad (Lawrence, Kansas). Bland annat visade resultaten att fordon i vänsterfilen accepterar kortare tidluckor och att for-don som närmar sig en korsning med låg hastighet har större acceptanstidluckor än de med högre hastighet.
Baass & Lefevbre. Montreal, Canada. Transportation Research Record, USA.
Analysis of Platoon Dispersion with Respect to Traffic Volume.
”Köspridning beror på friktion. Hypotes: friktionen kan vara extern och intern. Intern friktion beror på trafiktäthet och volym.”
Benekohal, Treiterer. Univ. Of Illinois/Ohio State Univ. Transportation Research Record, USA.
CARSIM. Car-Following Model for Simulation of Traffic in Normal and Stop-and-Go Conditions.
Beskriver en realistisk ”car-following-model” som inte bara simulerar normal tra-fik utan också stop-and-go situationer på ”freeways”.
Taylor & Young & Thompson. Monash University, Australia. Transportation Research Record, USA.
Gap and Speed Data Acquisation Using Video.
”Tidluckor är kanske den viktigaste trafikvariabeln. Av den kan man bestämma volym, kapacitet och ”hela trafikströmmens konstruktion”. Videomätningar har många fördelar: man kan följa fordon över en kortare sträcka, följa flera fordon samtidigt och i olika körfält och ett fordon som byter körbana. Samma film kan utvärderas flera gånger beroende på vad man vill ha.
Nackdelarna är bland annat hög kostnad, dålig noggrannhet, kan ej samla stora datamängder och lång utvärderingstid.
Här beskrivs en automatisk data-utvärderingsteknik med hjälp av video. Syste-met kallas VADAS och är utvecklat vid Australian Road Research Board.
Metod: När ett fordon passerar en viss punkt på videoskärmen förändras ljus-intensiteten och tidpunkten för detta registreras.
Både manuell och automatisk utvärdering användes för att göra en jämförelse. Ett stoppur var inlagt i filmen som hjälp vid den manuella utvärderingen. Bandet spelades i ¼ hastighet. Ett valfritt märke i bilden valdes t.ex. vägkantlinje. Varje gång ett fordon passerade märket noterades tiden. Olika observatörer bevakade olika körbanor. Processen tog 90 minuter för att utvärdera en 15 minuters video-filmning
Med videoanalys bestämdes mellan vilka punkter man skulle mäta hastigheten. Punkterna fick väljas så att man klarade ljusförhållandena även vid molnpassage och andra skuggor. Det var viktigt att justera känslighetströskeln noggrant för varje detektionspunkt. Särskilt ljusa fordon kunde ge flera detektionspulser. Ett logiskt test vid databehandlingen plockade sedan bort de flesta falska pulserna. Resultatet anses vara minst lika bra som vid manuella observationer.
Det var ibland problem att registrera motorcyklar.
Jämförelse görs även mellan radar- och videomätningar. Fördelar med video-mätningar är att kameran kan placeras i princip vinkelrätt mot fordonens rörelse-riktning. På så sätt kan den registrera hastigheten längs en sträcka och variationer i denna. Vidare mäter alltså videon hastigheten över en viss sträcka medan radar mäter hastigheten i en punkt. Skillnader i medelhastighet för de olika mätmeto-derna är ca 1 km/h, vilket är litet med tanke på att mätfelet för båda instrument-typerna är 1 km/h.
Radarmätningarna fordrade två man under mättiden (4 tim). Video endast en man en timma för uppsättning. Databehandling för videometoden tog ca 6 tim. Data från radar överfördes snabbt till datorn, ca 1 tim, dvs. 9 mantimmar för radar och 7 mantimmar för videometoden. VADAS-proceduren kan dessutom snabbas upp ytterligare.
Att tänka på vid videomätningar och analys:
• Viktigt med solens läge och intensitet.
• Svårt med fordon som ligger nära bakom och kanske dolda av större fordon.
• Kameralinsen kan ge distorsionsfel i bilden.
• Parallaxfel uppstår eftersom bilden är tvådimensionell och verkligheten tre-dimensionell.
• Fordon på avstånd mäts i en annan vinkel än när de kommer nära. Det gör att detektionspunkterna kan aktiveras av exempelvis motorhuven på långt håll och taket på nära håll.
• Mörka bilar och motorcyklar kan vara svåra att detektera.
• Känsligheten på dataloggern justeras kontinuerligt efter solens ljusstyrka. Videobaserad datainsamling medför att data som tidigare inte var tillgängliga, som tidluckor på flerfiliga motorvägar och cirkulationshastighet i bilparkeringar, kan mätas. Videofilm innehåller mer information än vad man får från andra manu-ella mätmetoder. Man kan studera komplexa trafikrörelser. VADAS-systemet er-bjuder en ganska snabb metod för insamling och utvärdering av data.
Troutbeck, RJ. Australian Road Research Board.
The performance of uncontrolled intersections.
Fordonens anländandemönster både på ”huvudvägen” och bivägen påverkar i hög grad fördröjningen i en oreglerad korsning. Kapaciteten påverkas av spridningen i tidluckorna i huvudströmmen och särskilt av proportionen fria fordon.
Brilon, W & Grossmann, M. Ruhr-Universität Bochum. Bundesminister für Verkehr, Bonn.
Entwicklung eines Simulationsmodells für Knotenpunkte ohne Lichtsignal-anlagen
Utveckling av en simuleringsmodell som beskriver tidluckor i korsningar utan ljussignaler för trafik som:
1. Svänger till vänster i korsning 2. Kör rakt igenom korsning
3. Svänger av på ramp, och sedan vänster.
Modellen kan användas för att uppskatta trafikflödet i sådana korsningar. Exempelvis för att optimera trafikanpassad konstruktion av korsningar och avgöra behov av trafikljus.
Bartle & Skoro & Gerlough. University of California at Los Angeles.
Starting Delay and Time Spacing of Vehicle Entering Signalized Intersection
”Starting delay” är tiden det tar för första fordonet i en kö att köra in i korsningen efter att trafiksignalen har slagit om till grönt. ”Time spacing” är genomsnittliga tidsavståndet mellan bilarna i kön. Dessa två parametrar används för att studera korsningskapaciteten och signalernas tidsinställning.
Yoo, Song-Min. Kyung Hee Univ. Society of Automotive Engineers. Warrendale, USA.
Safety Study of Intervehicle Gap for Vehicle Longitudinal Control System
För att öka vägens kapacitet och samtidigt behålla säker trafikmiljö har IVHS (Intelligent Vehicle Highway Systems) introducerats. Ett automatiskt system som övertar manövrerandet från föraren och gör dynamisk infångning av fordon är möjlig. Ett longitudinellt schema visar på en dramatisk reduktion av luckor mellan fordon, till i närheten av 1 meter. Även om säkerhet garanteras för normala fall, kan olyckor bli oundvikliga i en oväntad situation.
Kikuchi, Chakraborty. University of Delaware, Newark. Transportation Research Record USA.
Car-Following Model Based on Fuzzy Inference System
En modell som skall förutsäga olika reaktioner. Reaktionerna beror på känslig-heten hos det följande fordonet och styrkan i stimulans från det ledande fordonet. Stimulansen mäts som den relativa hastigheten mellan ledande fordon och följ-ande fordon. Reaktionen hos följfölj-ande fordon mäts som dess accelerationer. Reak-tionen är direkt beroende av stimulansen. Känsligheten hos ett följande fordon för positiva eller negativa relativa hastigheter är lika. Det har dock observerats att förare reagerar kraftigare på avståndsminskningar än på avståndsökningar.
Det följande fordonet uppför sig enligt ett antal olika körsätt. Körsätten har byggts upp genom erfarenhet.
Ett körsätt / en körstrategi är t.ex. att a) accelerera om det ledande fordonet accelererar och b) retardera och hålla längre avstånd om det ledande fordonet retarderar och avståndet är kort.
Varje körsätt beskrivs verbalt och några exakta gränser för tillämpning är inte definierade.
Flera körsätt kan utlösas samtidigt i förarens medvetande och han kanske inte är säker på lämpligheten i sitt agerande.
Målet är att förutsäga beteendemönstret för den följande bilen vid en viss situation. Det som påverkar det följande fordonets beslut är:
• Avståndet mellan följande och ledande fordon
• Hastigheten hos följande och ledande fordon
Kyte & Tian & Kuhn & Poffenroth & Butorac & Robertson. University of Idaho, Moscow. Transportation Research Record, USA.
Saturation Gaps at Stop-Controlled Intersections
Rapporten handlar om mättnadstidluckor i stoppkontrollerade korsningar. Dels kritiska tidluckor i huvudströmmen och följetidluckor hos trafiken som kommer in i huvudströmmen. Presentation av mätdata från tvåstoppskorsningar och allväg-stoppkorsningar har gjorts för att visa många intressanta aspekter på mättnads-tidlucka och sålunda kapaciteten för dessa två korsningstyper.
Shenk Prassas & McShane & Roess. Polytechnic University, Brooklyn/Far-mingdale, N,Y. Transportaion Research Record, USA.
Stochastic Modeling of Shared-Lane Left-Turn Process and Its Effect on Saturation Flow
Undersöker på vilka sätt vänstersvängande fordon i köer hindrades under perioder med mättnadsflöde i början av trafiksignalens gröna intervall.
Saad, Farida. INRETS, France. VTI-konferens.
Temporal Aspects of Driver Risk Taking in Car-Following Situations
Studier av körstrategier hos försökspersoner på motorväg A6 i Parisområdet. Bil utrustad för mätning av tid, avstånd, hastighet och bromsanvändning. Samtidigt videofilmades körningen och de fyra mätvärdena lades in i bilden. Avståndet till framförvarande bestämdes med hjälp av framförvarande fordons storlek i bilden. Man studerade efteråt kritiska sekvenser vilket definierades som de sträckor då tidluckan varit 1,5 sekunder eller mindre. Försökspersonerna bestod av kate-gorierna noviser och erfarna.
Noviserna blev oftare hindrade i det högra ”långsamma” körfältet och de er-farna blev oftare hindrade i det vänstra ”snabba” körfältet. När erer-farna förare hamnade i kritiska situationer höll de oftare högre fart än noviser. Noviserna hamnade oftare i kritiska situationer.
Det påpekas också att man medvetet minskar tidluckan eller att tillfälliga minskningar accepteras vid tät trafik för att inte andra skall tränga sig in framför.
Analysen av observerade data gör det möjligt att karaktärisera både förarbete-ende och förhållanden i trafikmiljön. Körstrategier och risktagande kan identifi-eras.
Alla förare hamnade i kritiska sekvenser (lägen). Men noviserna hamnade oftare i dem. Resultaten visar en tydlig skillnad mellan förarnas verkliga körsätt och de formella säkerhetsrekommendationerna. Problemet är när andra bilister kör in i samma körfält. Noviserna konfronterades tre gånger så ofta med sådana situa-tioner.
Heino, van der Molen, Wilde
Risk-homeostatic processes in car-following behaviour: Individual diffe-rences in car-following and perceived risk
Detta är ett jämförelseexperiment med hänsyn till körstil och risktagande mellan ”sensationssökare” och ”sensationsundvikare” . Försökspersoner fick genomgå ett personlighetstest varefter de indelades i sensationssökare och sensationsundvikare
samt i tre grader av körerfarenhet. Alla fick köra två sektioner på en ”highway”. Försökspersonerna fick först följa en försöksbil med fritt valt avstånd och sedan på ett föreskrivet avstånd av 15 meter. Under båda delarna mättes tidluckan och hjärtpulsen. Därtill fick försökspersonerna i ord gradera risktagandet. På tillbaka-vägen skulle försökspersonen följa experimentbilen på fem olika avstånd och gradera risktagandet i ord. Under dessa olika avståndsförhållanden fick försöks-personen ge en verbal värdering av upplevd risk.
Efter körförsöket bad man försökspersonerna att välja ett bästa avstånd från nio fotografier som visade bakdelen på experimentbilen från körtestet på flera olika avstånd.
Resultaten från körförsöket visade att sensationssökare och sensations-undvikare skiljer sig systematiskt från varandra. Den första gruppen föredrog ett tidsavstånd på 1,19 sekunder och den senare 1,87 sekunder.
Den specialutrustade bilen som användes i försöket finns beskriven med nedan-stående figur.
Figur 2 Försöksfordon använt vid undersökning av följandebeteende.
Sensationssökarna uppfattade sitt fritt valda kortare avstånd som lika säkert som sensationsundvikarna uppfattade sitt längre avstånd.
Kromer, S. Lunds Tekniska Högskola.
Drivers’ speed behaviour at an intersection with yield sign regulation – A field study
Målet var att upptäcka vilken påverkan trafiken på en huvudväg har på hastighets-beteendet hos förare som närmar sig en korsning från en mindre väg.
Hastighetsprofilen registrerades för situationer med ingen trafik på huvud-vägen. När inbromsningen började registrerades avståndet till korsningen och hastigheten.
Huvudrörelser studerades för att se vart förarna riktade sin uppmärksamhet. Man såg att de som skulle svänga vänster eller köra rakt fram var mest uppmärk-samma. Huvudrörelserna studerades när ingen trafik var inblandad, 85% tittade först till vänster och 14% tittade även en andra gång till vänster. Bland dem som skulle svänga till höger tittade bara 11% till höger en andra gång och 78% tittade endast till vänster.
Högersvängande hade en medelhastighet på 17 km/h när de nådde korsningen. Vänstersvängande var mest påverkade av fordon från båda riktningar. De nådde korsningen med en hastighet av 9 km/h.
När man började bromsa var det 4,4 sekunder kvar till väjningslinjen om det inte var någon trafik på huvudvägen.
Ozaki, H. Transportation and traffic theory. 12th international symposium, Berkley, CA, USA.
Reaction and Anticipation in the Car-Following Behavior
I en del modeller som har lagts fram antas att ett följande fordon reagerar på den relativa hastigheten efter en tidsförändring. Dessa modeller resulterar ofta i en högre frekvens av upphinnandekollisioner än vad som sker i verkligheten. Dess-utom kan de inte beskriva flaskhalsfenomen.
Här undersöks åter följebeteendets natur genom mätningar på en testbana och på en japansk motorväg. Mätningarna på Tokyo Metropolitan Expressway gjordes med video från toppen av ett 32-våningshus. Videon övervakade en 160-meters-sektion under 90 minuter.
• Reaktionsfördröjningen för ett följande fordon varierar beroende på trafik-situationen.
• Reaktionskänsligheten beskrivs väl av utrymmet till framförvarande och hastigheten hos den följande.
• Negativ tidsförskjutning tycks uppstå då den följande uppfattar tillräckligt stor stimulans från den framförvarande.
6
Undersökning
6.1 Beskrivning av mätplatser
UrvalskriterierDen typkorsning som skulle undersökas definierades. Det skulle vara en rätvinklig fyrvägskorsning i tätort där anslutande gator har endast ett körfält i varje riktning och den studerade trafiken har företräde gentemot den anslutande trafiken, med ungefär samma trafikflöde och typ av trafik. Syftet var att söka så stadslik trafik-miljö som möjligt. Eftersom avståndshållning i ”stadstrafik” skulle beskrivas sök-tes korsningar i första hand inom 50-begränsat område både med och utan ljus-signalreglering.
Fyra mätplatser i tätbebyggt område valdes ut för studien. Det visade sig vara svårt att hitta korsningar med alla egenskaper vi ville ha i innerstaden, som sam-tidigt var lämpliga att genomföra mätningar i. De valda korsningarna kom att ligga i vad man kan beskriva som randområde i stadsmiljö. Samtliga fyra kors-ningar var belägna i Linköpings tätort.
De utvalda korsningarna beskrivs i tabell 2 och visas i figurerna 3 till 6. Tre av de fyra korsningarna har hastighetsgränsen 50 km/h och en hastighetsgränsen 70 km/h. Två korsningar har trafikljus medan de övriga två regleras av väjnings-respektive stopplikt. En korsning är en trevägskorsning. Samtliga har en gemen-sam fil för raktframkörande och högersvängande trafik.
Tabell 2 Mätplatser
Mätplats Gata/väg Korsningstyp Företrädesregel Hast.gr.
1 Gamla
Tanneforsvägen
3-vägskors En gemensam fil Väjningsplikt för anslutande gata
50 km/h 2 Vistvägen 4-vägskors Särskild fil för
vänstersvängande Stopplikt för anslutande gator 50 km/h 3 Lambohovs-leden
4-vägskors Särskild fil för vänstersvängande
Ljusreglerad korsning.
70 km/h 4 Roxviksgatan 4-vägskors Särskild fil för
vänstersvängande
Ljusreglerad korsning
Mätplats 1. Gamla Tanneforsvägen.
Hagalundsvägen
p0
SAAB Flygplats
• 2-fältsgata med trottoarer.
• 3-vägskorsning.
• Gemensam fil för högersvängande och raktframkörande, vänstersväng ej möjlig.
• Hastighetsbegränsning 50 km/h.
• Väjningsplikt för anslutande Hagalundsvägen.
Busshpl.
p4
(Mätsnittet p2 fick flyttas 2,28 meter närmare kors-ningen på grund av utfarten som syns längst fram i bilden nedan.)
videokamera p6
Figur 3 Korsningen mellan Gamla Tanneforsvägen och Hagalundsvägen.
Gamla Tanne
forsväg
en
st op Mätplats 2. Vistvägen Åleryds vårdhem • 2-fältsväg med avskilda GCbanor • 4-vägskorsning. • Gemensam fil för
högersvängande och rakt fram körande, särskild fil för vänstersvängande.
• Hastighetsbegränsning 50 km/h
• Stopplikt för korsande trafik på Ålerydsvägen.
• Parkliknande omgivning med cykelbanor.
videokamera
Figur 4 Korsningen mellan Vistvägen och Ålerydsvägen.
Vistvägen Ålerydsvägen st op p6 p4 p2 p0
Mätplats 3. Lambohovsleden
Mjärdevi Science Park
Gamla Kalmarvägen Universitetsvägen
FOA VTI LiU • 2-fältsväg med avskilda GCbanor • 4-vägskorsning. • Gemensam fil för
högersvängande och rakt fram körande, särskild fil för vänstersvängande.
• Hastighetsbegränsning 70 km/h.
• Trafikljus.
videokamera
Figur 5 Korsningen mellan Lambohovsleden och Gamla Kalmarvägen.
Lambohovsleden
p6 p4 p2 p0
Mätplats 4. Roxviksgatan
BILTEMA IKEA
Svedengatan
Fyra Tassar ROXY
• 2-fältsgata med kant och avskilda GC-banor.
• 4-vägskorsning.
• Gemensam fil för höger-svängande och rakt fram körande, särskild fil för vänstersvängande.
• Hastighetsbegränsning 50 km/h.
• Trafikljus.
videokamera
Figur 6 Korsningen mellan Roxviksgatan och Svedengatan.
Roxviksgatan
p6 p4 p2 p0
6.2
Mätprocedur
Tidlucka, hastighet och väglucka (lucka i meter) mättes i de fyra korsningarna. Mätningarna gjordes på tre olika sätt. Två av de använda metoderna bygger på mätningar med VTIs trafikanalysator TA-89. Dessa mätningar gjordes under tiden 19-22 oktober 1998. Den tredje mätmetoden innebar enbart videofilmning vilken gjordes två veckor efter de första mätningarna.
I. All trafik mättes under två dygn med trafikanalysator på de fyra platserna.
II. Under tiden videofilmades rusningstrafik 2 till 3 timmar för att kunna identifiera hindrade och hindrande fordons körriktning i kors-ningen.
III. En separat videofilmning gjordes på Lambohovsleden, där var femte meter, på en sträcka av 70 meter, var markerad med en käpp för att beräkna tidluckans ”kontinuerliga” förändring. Mätningen gjordes under ett par timmar vid rusningstrafik.
IV. Distraktionsfaktorer studeras genom synobservationer på respektive mätplats.
6.2.1 Mätning med trafikanalysator TA-89
Fyra korsningar mättes med fyra mätsnitt vid varje. För mätsnittet närmast kors-ningen lades slang 2 vid stopplinjen eller tänkt stopplinje och slang 1 3,3 m före denna. Sedan lades de tre övriga mätsnitten på avstånd motsvarande 2,4 och 6 sekunder före korsningen för en bil som kör i en hastighet lika med hastighets-gränsen. Vid fil för vänstersvängande användes s.k. delad slang som kan skilja ut trafiken i de olika filerna.
Mätningen gjordes under 2 vardagsdygn per plats. Se exempel på datautskrift i bilaga 1.
6.2.2 Mätning med trafikanalysator TA-89 och video
Under rusningstid skedde samtidigt med trafikanalysatormätningarna videofilm-ning för att man senare skulle kunna särskilja de enskilda fordonens beteenden före och i korsningen. Se bilaga 2.
I varje mätsnitt noterades fordonens ankomsttid, tidlucka till framförvarande, hastighet, axelavstånd samt fordonstyp.
Problemet vid studie av enskilda fordon vars beteende observerats på video-filmen, var att hitta samma fordon i mätfilerna från de fyra mätsnitten. Ett särskilt program gjordes för att koppla ihop filerna till en fil så att samma fordon skrevs ut på samma rad. Programmet letade efter trolig ankomsttid till nästa mätsnitt. Sedan kontrollerades automatiskt att axelavståndet stämde och att förändringen av tid-luckan och hastigheten inte var orealistisk, se bilaga 3.
6.2.3 Mätning med enbart video
I november 1998 gjordes en videofilmning av den tidigare undersökta korsningen på Lambohovsleden. En del av eftermiddags- och kvällsrusningstrafiken filmades.
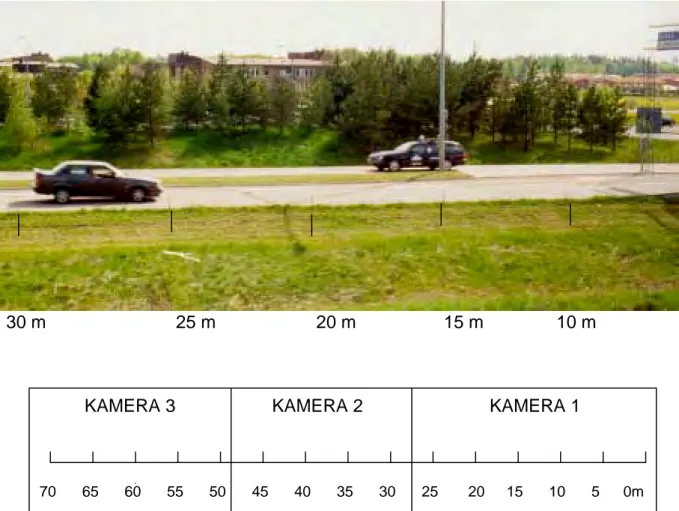
I figur 7 nedan visas en skiss över hur en sträcka på 70 meter av vägen täcktes med videofilmning från tre kameror. Var femte meter var markerad med en trä-käpp som kunde ses i filmen och användas för beräkning av tidluckorna mellan bilarna. Beräkningar se bilaga 4.
30 m 25 m 20 m 15 m 10 m
KAMERA 3 KAMERA 2 KAMERA 1
70 65 60 55 50 45 40 35 30 25 20 15 10 5 0m
Figur 7 Fotografi samt skiss över uppmärkning och filmning av trafiken på
Lambohovsleden.
6.2.4 Inventering av distraktionskällor
Det finns många faktorer som påverkar förarnas uppmärksamhet i trafikmiljön. För att undersöka vilka faktorer som påverkar förarnas uppmärksamhet kan man antingen studera förarna, eller studera trafikmiljön och försöka bedöma olika faktorer i den. I denna undersökning har den senare metoden använts. Som under-lag för bedömningen har videofilmning av en färd genom korsningen samt statio-när filmning använts. Även anteckningar från synobservation på platsen och foto-grafering från olika perspektiv efter vägen har ingått i underlaget.
7
Analys och resultat
Analyser och resultat redovisas i detta kapitel i fyra avdelningar. I de tre första presenteras tidluckeförändringar framtagna enligt tre olika metoder och i den fjärde avdelningen redovisas distraktionsfaktorer.
I. Med den första metoden har alla hindrade fordon som passerat mätsnitten under 2 dygn undersökts. Tidluckor har beräknats. (Kap. 7.1)
II. Med andra metoden har raktframkörande fordon som hindrats av fordon som antingen svänger till höger eller kör rakt fram i kors-ningen, vid rusningstrafik undersökts. I denna metod identifieras fordon från en videofilm. Tidluckor och hastigheter beräknas. (Kap. 7.2)
III. I den tredje metoden har den kontinuerliga förändringen av tid-luckan undersökts genom videofilmning och tidtagning med flera mätsnitt än föregående metoder. Här liksom i föregående metod undersöks fordon som hindrats av antingen högersvängande eller raktframkörande. (Kap. 7.3)
IV. Distraktionskällor från de fyra mätplatserna har inventerats och redovisas. (Kap. 7.4)
7.1 Tidluckeförändringar för alla hindrade fordon under två
dygn
7.1.1 Medeltidluckornas förändring mellan mätsnitten
Med alla hindrade fordon avses här både högersvängande, vänstersvängande och raktframkörande fordon på den studerade väglänken som mättes under de två dyg-nen. I tabell 3 nedan anges i varje ruta medeltidluckan för hindrad trafik, medel-hastigheten (time mean speed) och medelvägluckan för fordon mätta under 2 dygn. Eftersom fordon med låga hastigheter ger svagare signaler i givarna blir resultatet oftare databortfall för dessa. Tabellvärdena för medelhastigheten och medelvägluckorna kan därför ligga något högre än de sanna värdena.
Tabell 3 Medeltidlucka (grönt), medelhastighet(blått) och medelväglucka(rött) i
fyra mätsnitt på de studerade mätplatserna. Maxvärde markerat med under-strykning.
Tidluckor
Hastigheter Mätsnitt Vägluckor
”6 sek.” ”4 sek.” ”2 sek.” ”0 sek.” Gamla Tanneforsvägen 50 km/h hast.gräns 2,31 s 44,0 km/h 28,2 m 2,30 s 43,1 km/h 27,5 m 2,65 s 42,5 km/h 31,3 m 2,52 s 36,1 km/h 25,3 m Vistvägen 50 km/h hast.gräns 2,34 s 49,1 km/h 31,9 m 2,32 s 47,5 km/h 30,6 m 2,34 s 48,0 km/h 31,2 m 2,48 s 43,8 km/h 30,2 m Lambohovsleden 70 km/h hast.gräns + trafikljus 2,35 s 54,2 km/h 35,4 m 2,34 s 50,2 km/h 32,7 m 2,34 s 45,0 km/h 29,3 m 2,20 s 42,4 km/h 25,9 m Roxviksgatan 50 km/h hast.gräns + trafikljus 2,56 s 34,9 km/h 24,8 m 2,71 s 30,7 km/h 23,1 m 2,61 s 19,9 km/h 14,4 m 2,15 s 25,5 km/h 15,2 m Medelvärdet för tidluckor för hindrade fordon. från de olika platserna ligger som synes mellan 2,15 och 2,71 sek. De två gatorna utan trafikljus uppvisar en ökning
av tidluckan närmare korsningen, +0,21 / +0,14 sek., medan de två gatorna med
trafikljus uppvisar en minskning av tidluckan, -0,15 / -0,41 sek., närmare kors-ningen. Hastigheterna minskar för alla fyra platserna närmare korsningen med respektive –7,9 / -5,3 / -11,8 / -9,4 km/h. Vägluckan minskar närmare korsningen med två undantag för snitt ”2 sek.”, där Gamla Tanneforsvägen har ett maxvärde och Roxviksgatan ett minvärde.
2 2,2 2,4 2,6 2,8 3 p6 p4 p2 p0 Mätsnitt M e delt idlucka ( sek.) G.Tannef.väg . Vistvägen Lambohvsled. Roxviksgatan
Figur 8 Tidluckans förändring för all hindrad trafik under två dygn.
10 15 20 25 30 35 40 45 50 55 60 p6 p4 p2 p0 Mätsnitt M ed el h as ti g h et ( k m /h ) G.Tannef.väg . Vistvägen Lambohvsled. Roxviksgatan
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 p 6 p 4 p 2 p 0 M ä t s n i t t M e d el väg lu cka ( m ) G . T a n n e f o r s v . V i s t v ä g e n L a m b o h o v s l e d e n R o x v i k s g a t a n
Figur 10 Vägluckans förändring för all hindrad trafik under två dygn.
7.1.2 Regressionsmodell för alla hindrade fordon
Genom regressionsanalys av de uppmätta värdena från samtliga platser får vi fram en modell som kan sägas beskriva tidluckan som funktion av hastighet och läge i förhållande till korsningen. I dessa regressionsekvationer används följande be-teckningar:
T medeltidluckan (sek)
v medelhastigheten i aktuellt mätsnitt (km/h)
S mätsnitt (sek från korsningen, baserat på skyltad hastighet) r korrelationskoefficienten
Om man låter analysen vila på samtliga fordon i de fyra korsningarna, kommer modellen att beskrivas av följande regressionsekvation:
T = 2,68 – 0,008*v + 0,0162*S , r = 0,43
Enligt ekvationen har således tidluckorna positivt samband med avståndet från korsningen och svagt negativt samband med hastigheten. Det vill säga:
• Ju längre ifrån – ju längre tidlucka
• Ju längre ifrån – ju lägre hastighet
Den förhållandevis låga korrelationskoefficienten kan delvis förklaras av att tid-luckorna från korsningen på Gamla Tanneforsvägen avviker något från de övriga. För de övriga tre korsningarna är resultaten mycket konsistenta. Man bör
dess-utom ha i åtanke att i denna analys baseras tidluckorna på såväl fordon som har kört rakt fram, som på fordon som har svängt till höger eller vänster.
7.1.3 Tidluckefördelningarnas förändring mellan mätsnitten
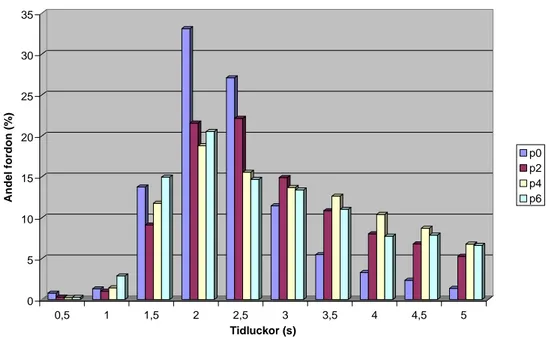
Följande fyra diagram visar, för den totala hindrade trafiken, att den minsta sprid-ningen av tidluckor har vi närmast korssprid-ningen vid trafikljus och en bit före, snitt ”2sek.” respektive snitt ”4sek”, vid korsningarna utan trafikljus. Snitt ”0sek” be-tecknas i figurerna med p0 osv. på samma sätt upp till p6.
0 5 10 15 20 25 A ndel for don (%) 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 Tidluckor (s)
Tidluckefördelning. G:a Tanneforsvägen.
p0 p2 p4 p6
Figur 11 Tidluckefördelning för Gamla Tanneforsvägen. Hastighetsgräns
50 km/h.
Av figur 11 framgår att spridningen är liten i korsningen men även i mätsnitten ”4sek” och ”6sek”. Detta kan bero på trafikmiljön med busshållplats och utfarter som kan orsaka inbromsningar före korsningen.
0 5 10 15 20 25 A nde l f or don ( % ) 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 Tidluckor (s) Tidluckefördelning. Vistvägen. p0 p2 p4 p6
Figur 12 Tidluckefördelning för Vistvägen. Hastighetsgräns 50 km/h.
Vistvägen uppvisar en mindre skillnad i tidluckefördelningen mellan mätsnitten som framgår av figur 12.
0 5 10 15 20 25 30 Ande l for don (%) 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 Tidluckor (s) Tidluckefördelning. Lambohovsleden. p0 p2 p4 p6
Figur 13 Tidluckefördelning för Lambohovsleden. Hastighetsgräns 70 km/h.
Trafikljus.
Trafiken på Lambohovsleden uppvisar en ändring av tidluckefördelningen som har ett mera ”idealt” utseende, dvs. har minsta spridningen närmast korsningen och största spridningen längst från korsningen, enligt figur 13 ovan.
0 5 10 15 20 25 30 35 Ande l for don (%) 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 Tidluckor (s) Tidluckefördelning. Roxviksgatan. p0 p2 p4 p6
Figur 14 Tidluckefördelning för Roxviksgatan. Hastighetsgräns 50 km/h.
Trafik-ljus.
Spridningen är ganska stor för de tre mätsnitten längst ifrån korsningen men har minskat betydligt till snitt ”0sek”, enligt figur 14 ovan.
7.2 Tidluckeförändringar för raktframkörande fordon
hind-rade av högersvängande resp. raktframkörande fordon
Här redovisas resultaten för hindrade fordon som körde rakt fram under rus-ningstrafik. Hindret var ett framförvarande fordon som antingen svängde höger eller körde rakt fram i korsningen.Denna undersökning gjordes under några timmar vid två till tre tillfällen på varje mätplats beroende av trafikflödets storlek. Vid Roxviksgatan var antalet hindrade fordon som körde i kö utan att stanna så litet, att den platsen fick utgå från den här delen av undersökningen. Tidluckeanalysen har således uppdelats i:
• Fordon som hindras av högersvängande. Beteckning ”H-R”.
• Fordon som hindras av raktframkörande. Beteckning ”R-R”.
Tidluckorna är mindre än i det föregående avsnittet som avsåg den totala hindrade trafiken under två dygn med alla körriktningar medtagna. Medeltidluckan ligger mellan ca 1,5 och 2,4 sek. och minskar närmare korsningen på de tre olika platserna.
Det är som framgår av tabellerna ett stort bortfall speciellt vid mätsnitten när-mast korsningen. Oftast beror det på att bilarna har så låg hastighet att de inte registreras eller att felregistreringar uppstår.
Skillnader i antal fordon mellan olika platser och körbeteende beror förutom mätbortfall, på trafikflödet och förhållandet mellan antal i situation ”H-R” respek-tive ”R-R”.
7.2.1 Medeltidluckornas, percentilernas och spridningens förändring mellan mätsnitten
Gamla Tanneforsvägen
Gamla Tanneforsvägen avviker från de övriga genom att uppvisa minimum vid näst sista snittet före korsningen, vilket kan bero på att miljön före korsningen kanske distraherar mer än själva korsningen, se beskrivning i avsnitt 7.4.
a) Situation H-R:
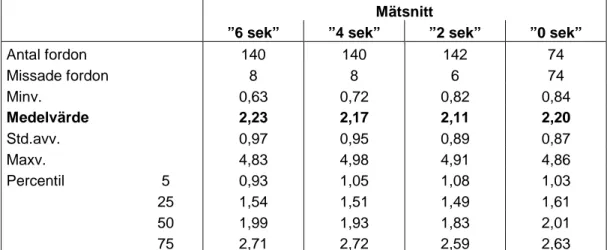
Nedan i tabell 4 visas tidluckevärden i de fyra mätsnitten belägna 6, 4, 2 och 0 sekunder före korsningen.*
Tabell 4 Uppmätta tidluckevärden för Gamla Tanneforsvägen ”H-R”.
Mätsnitt
”6 sek” ”4 sek” ”2 sek” ”0 sek”
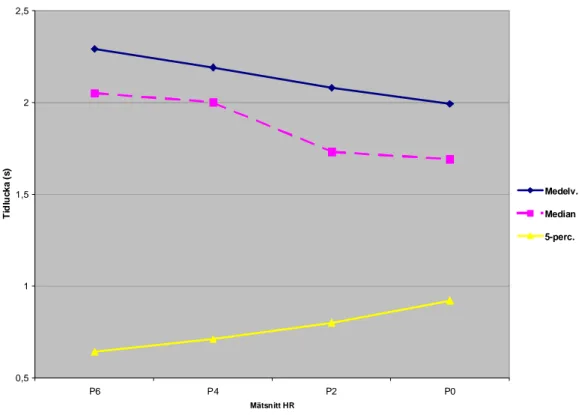
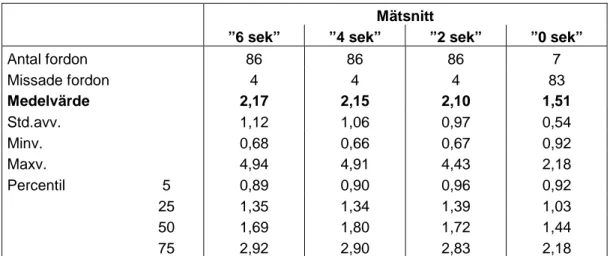
Antal fordon 140 140 142 74 Missade fordon 8 8 6 74 Minv. 0,63 0,72 0,82 0,84 Medelvärde 2,23 2,17 2,11 2,20 Std.avv. 0,97 0,95 0,89 0,87 Maxv. 4,83 4,98 4,91 4,86 Percentil 5 0,93 1,05 1,08 1,03 25 1,54 1,51 1,49 1,61 50 1,99 1,93 1,83 2,01 75 2,71 2,72 2,59 2,63
För Gamla Tanneforsvägen H-R minskar medelvärdet med 0,12 sek. (till snitt ”2sek”) medan 5-percentilen ökar ju närmare korsningen man kommer. Standard-avvikelsen minskar vilket betyder att spridningen av tidluckor minskar. Medianen är mindre än medelvärdet eftersom fördelningen är osymmetrisk.
0,5 1 1,5 2 2,5 P6 P4 P2 P0 Mätsnitt HR T idl uc k a ( s ) Medelv. Median 5-perc.
Figur 15 Olika tidluckemåtts förändringar vid G:a Tanneforsvägen ”H-R”.
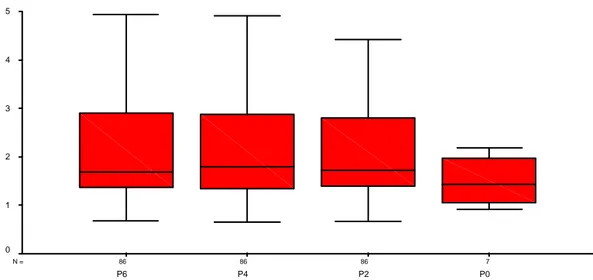
74 142 140 140 N = P0 P2 P4 P6 5 4 3 2 1 0
Figur 16 Spridningens förändring beskriven med ”boxplot” som beskriver
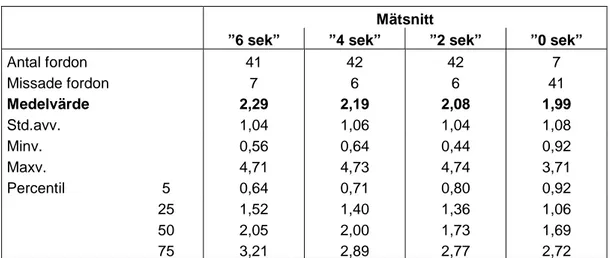
kvar-tilernas lägen vid G:a Tanneforsvägen ”H-R”. b) Situation R-R:
Nedan i tabell 5 visas tidluckevärden i de fyra mätsnitten belägna 6, 4, 2 och 0 sekunder före korsningen.*