Assessing the human
barriers and impact of
autonomous driving in
transportation activities
Assessing the human
barriers and impact of
autonomous driving in
transportation activities
MASTER THESIS WITHIN: Business Administration NUMBER OF CREDITS: 30 ECTS
PROGRAMME OF STUDY: International Logistics and Supply Chain Management
AUTHOR: Constance Gresset & David Morda TUTOR: Imoh Antai
JÖNKÖPING May 2021
MASTER THESIS WITHIN: Business Administration NUMBER OF CREDITS: 30 ECTS
PROGRAMME OF STUDY: International Logistics and Supply Chain Management
AUTHOR: Constance GRESSET & David MORDA TUTOR: Imoh Antai
JÖNKÖPING May 2021
A multiple case study.
Assessing the human barriers and impact of autonomous driving in transportation activitiess
II
Acknowledgment
This thesis represents the last step of our master's program and we would like to thank all the people who have been supporting us for the past two years, especially in those difficult times. We would like to thank our thesis supervisor Imoh Antai for his interesting insights and suggestions and for remotivating us at a crucial time of our studies.
Furthermore, we would like to thank all the interview participants that have been included in this thesis, as this was challenging because of the constraints that the Covid-19 crisis has brought. They were very helpful throughout the whole process and it has been personally rewarding to exchange with them about the future of our work field.
Then, we have a special mention for the members of our seminar groups who have provided us with great feedback throughout the whole process, giving us insightful advice that helped us going through with this work.
David would like to thank Constance for the time spent together in different group assignments, for her toughness and inspiration at all times, the constructive and relevant feedback, that helped him to surpass himself at all times and exceed the expectations that were set up.
Constance would also like to thank David for his trust, his useful comments, his constant motivation that helped her to not give up, as well as for the peaceful teamwork all along the thesis process. The cooperation worked very well, and a better and friendlier work atmosphere could not have been expected.
Constance Gresset & David Morda
Jönköping University – International Business School May 2021
III
Master Thesis in Business Administration
Title: Assessing the human barriers and impact of autonomous driving in transportation activities.
Authors: Constance Gresset & David Morda Tutor: Imoh Antai
Date: 2021-05-24
Key terms: Autonomous driving, Resistance to Change, Autonomous Trucks, Change Management
Abstract
Background: The transport industry is facing new challenges such as increased
competition between the actors and an increasing shortage of truck drivers. Implementing new technologies such as autonomous driving can represent a solution for companies to increase their competitiveness and gains. However, implementing such an innovative solution leads to a certain resistance to change that has to be dealt with, as well as concerns about the current jobs within the industry.
Purpose: The purpose of this thesis is to assess the resistance to change linked to implementing this technology within Logistics Service Providers, provide solutions to overcome this resistance, as well as assessing the impact on jobs.
Method: An inductive multiple case study has been used to conduct this research. The data was gathered from 12 semi-structured interviews with experts related to the transport industry. Then, thematic data analysis has been used to provide insights.
Conclusion: The results show that the resistance is characterized by barriers to the
technology and the resistance from the people, that support and communication is the key factor for successful implementation and that the truck driving professions will evolve considerably.
IV
Table of Contents
Acknowledgment ... II
Introduction ... 1
Background ... 1 Problem Discussion ... 2 Purpose ... 4 Delimitations ... 5 Structure ... 5Literature Review ... 6
Autonomous driving ... 6Definition and current state ... 6
Opportunities & Barriers ... 10
Impact on the industry ... 15
Resistance to change ... 18
Change definition ... 19
Trust ... 20
Models and factors ... 22
Analysis of resistance ... 23
Solutions to overcome resistance and built trust ... 25
Conclusion ... 27
Methodology ... 31
Research philosophy ... 31
Research approach ... 32
Research strategy & design ... 33
Selection of interview partners ... 34
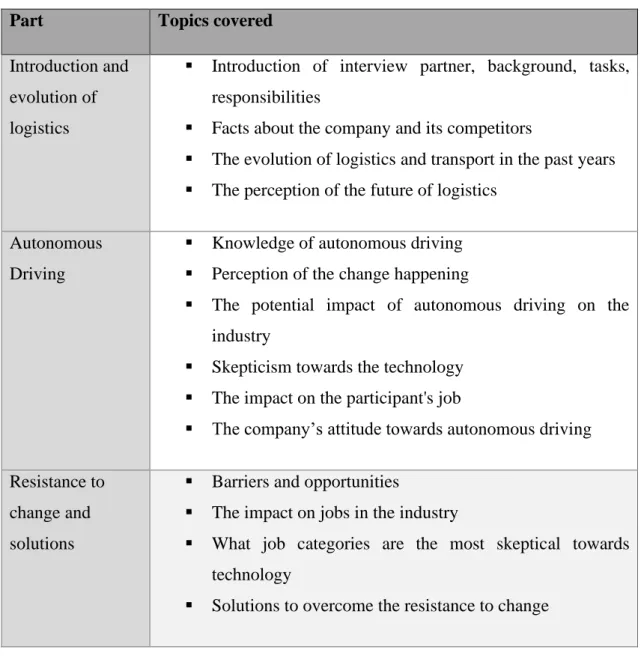
Interview structure ... 35
Data collection ... 37
Data analysis ... 39
Ethics & Quality ... 41
Empirical findings ... 44
Evolution of logistics and transport industry ... 44
Autonomous driving ... 46
Autonomous trucks implementation ... 46
Transition towards autonomous trucks ... 47
Impact on jobs ... 48
Resistance to change ... 49
Benefits and barriers ... 49
Peoples’ resistance ... 50
Solution to overcome resistance ... 52
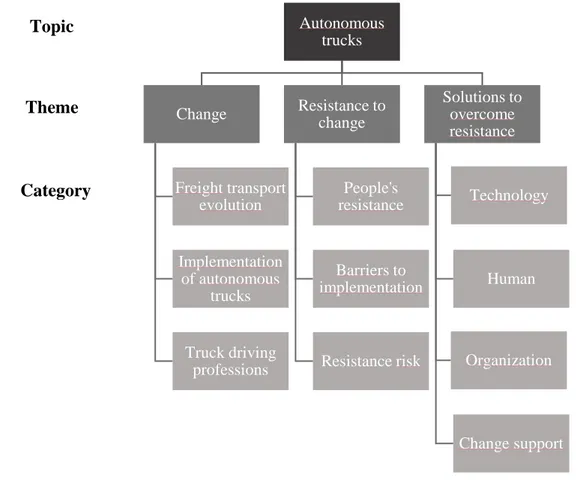
Data analysis ... 53
Change ... 53
Freight transport evolutions ... 53
Implementation of autonomous trucks ... 54
Truck driving professions ... 56
V
People’s resistance ... 59
Barriers to implementation ... 60
Resistance risk ... 63
Solutions to overcome resistance ... 63
Technology ... 63 Humans ... 64 Organizations ... 65 Change support ... 66
Conclusion ... 69
Discussion ... 71
Managerial implications ... 71 Theoretical implications ... 71 Limitations ... 72Reflection on our own work ... 73
Future research ... 73
Reference list ... 75
VI
Figures
Figure 1. The different levels of automation ... 8
Figure 2. The eight steps of change ... 20
Figure 3. Factors that influence trust in automation ... 23
Figure 4. Conceptual model ... 30
Figure 5. Overview of the categories ... 40
Figure 6. Conceptual model with further implications ... 67
Tables
Table 1. Opportunities of autonomous driving ... 11Table 2. Barriers of autonomous driving ... 14
Table 3. Interview Structure ... 37
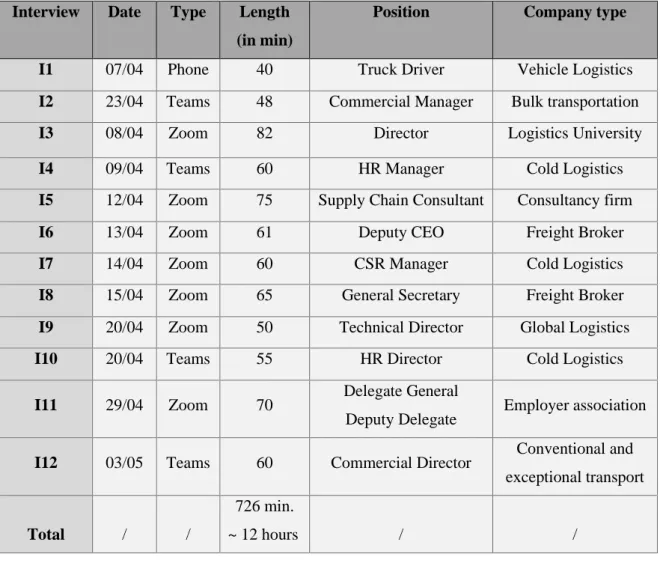
Table 4. List of interviews ... 38
Appendices
Appendix 1. Example of an email to contact companies ... 87Appendix 2. Example of interview questions ... 89
Appendix 3. List of benefits collected in the interviews ... 92
1
Introduction
The following chapter provides a brief introduction to autonomous driving and autonomous trucks, barriers such as resistance to change, and the impact on trucking jobs in the logistics industry. It also identifies the purpose of the study, the research questions, the delimitations. Finally, we outline the structure of this thesis.
Background
At a turning point in modern history, following the Industrial Revolution, there was a switch from horse carriage to motorized means of transportation. This was considered a revolution at a time, changing mobility in all aspects, but it was not a simple change. The switch from human-driven vehicles to autonomous ones can be considered as the new revolution in transportation (Trösterer et al., 2017).
Automation in transportation started in the 1950s when automation in enclosed spaces such as warehouses and airports has been developed (Maurer et al., 2016). The first proper autonomous vehicles with a standard pattern have their starting point in Australia’s ore industry in the 1990s (Maurer et al., 2016). Since then, the technology has improved: while it is still mostly used for guided vehicles in ports, airports, or warehouses, there are some developments for use on public roads (Kusumakar et al., 2018; Meyer & Beiker, 2019), but still apart from manned vehicles. There have been many signs of progress in automation with the development of Artificial Intelligence and deep learning, that led to computers being able to learn by themselves (Grigorescu et al., 2020).
Within the field of logistics, automation is also present. Global trade, globalization, and economic output have never been greater than today. Research has shown that it is due partially to decreasing transport costs (Van Meldert & De Boeck, 2016). Supply chains are globally integrated, and we can also relate this to the globalization of intercontinental traffic with the use of containers and those decreasing costs (Bucky, 2018). Therefore, research and investments in autonomous trucks are increasing, from production to last-mile delivery (Hjalmarsson-Jordanius et al., 2018) and this comes with many
2
opportunities but also significant barriers to be overcome, such as the resistance to change and the unknown impact it will have on jobs.
There has been significant prior research on autonomous driving but most of the research on this topic has been about the technical aspects and it can be argued that the technology is not mature yet (Trösterer et al., 2017). It is also focused on private transportation, such as cars (Bucky, 2018). However, around a third of road traffic comprises the transportation of goods (Maurer et al., 2016). Regarding freight autonomous transportation, there has been some research on the technology being used in closed environments (Hjalmarsson-Jordanius et al., 2018), on last-mile deliveries in city logistics (Mitra & Kyamakya, 2017) or platooning (Scherr et al., 2019).
Problem Discussion
With the continuously increasing impact of globalization and the rise of economic output, the need for efficient logistics service providers is increasing. The Covid-19 crisis also highlighted the importance of logistics services within global supply chains and the need they have to be efficient and performing (Lockse, 2020). A change in the industry is necessary in order not only to remain competitive but also to reduce the environmental impact of freight transport.
Autonomous driving in the transport industry will have a significant impact on the industry and the way mobility is thought. There are, however, some challenges to keep in mind. First, the competition between the different Logistics Service Providers has been increasing with the growing economic output and it is now crucial to be innovative to be competitive (Scherr et al., 2019). Second, there is a need for those providers to implement innovative delivery options while keeping their economic and service quality targets (Scherr et al., 2019). Finally, there is a need to address the shortage of qualified drivers that has been occurring in the past years (Scherr et al., 2019).
Some assisted driving features are already being used on current trucks, but the need for a human driver is still necessary as the vehicle does not monitor its environment (DHL Supply Chain, 2021; Fisher, 2020). To reach full automation, there will be a transition zone when the technology will improve gradually (Fisher, 2020; Fritschy & Spinler,
3
2019). This transition will last until at least 2050 when fully autonomous vehicles might be the norm (Fisher, 2020). It also brings the notion of change within the transport industry, that needs to be planned and anticipated, and it has to be managed properly to avoid failures (Appelbaum et al., 2012; Kotter, 2008).
Therefore, autonomous driving is a solution that could be implemented to solve the problems of the logistics industry. However, the key problem of autonomous driving is the technology that is not ready yet (DHL, 2021; Fisher, 2020). There are two major challenges to this problem: the resistance to change from the stakeholders in the industry, and the potential impact of autonomous driving on the current jobs.
The human factor and the resistance to change in society are paramount. Resistance to change refers to the “fear of anything unfamiliar” (Oxford Dictionary, 2015), which is a challenge to implementing autonomous driving. Autonomous driving is a radical innovation that may change completely the mobility of goods, but humans have an instinct to protect their habits that such innovations might considerably change (König & Neumayr, 2017). Resistance to change often results in a slowdown of innovation implementation (NP, 2013) and is an organizational as well as an individual issue. Furthermore, the higher level of automation, the more resistant and skeptical humans are (Begg, 2014), but also the fewer knowledge people have about the innovation (König & Neumayr, 2017). Dealing with this resistance usually requires education, communication, participation, and involvement (Kotter, 2008).
Regarding the impact that implementing autonomous driving will have on the transport industry, it can be expected that autonomous driving might be a way to address the drivers’ shortage that has been continuously increasing (Mealh, 2017; Scherr et al., 2019). However, the current professions within the logistics industry will continue to be relevant concurrently to the implementation of autonomous driving (Trösterer et al., 2017). The impact might be negative or positive, but it can be argued that there will be a significant change for the truck drivers’ profession (Noruzoliaee et al., 2018; Van Meldert & de Boeck, 2016).
4 Purpose
While existing literature has extensively covered the end-consumer acceptance of autonomous driving, we have identified a gap in the literature regarding the resistance to change from a Logistics Service Provider perspective. There is also a lack of research on how the professionals in the industry are anticipating and accepting the rise of this new technology.
The second gap found in the literature is regarding the impact on jobs. Current research has not extensively discussed the impact of the implementation of autonomous trucks within the Logistics industry. There is also no assessment of the impact it will have on the other jobs within the industry. If a truck driver can do administrative tasks during travel time, there may be an impact on the administrative employees.
The purpose of this thesis is to assess the resistance to change towards autonomous trucks from a Logistics Service Provider perspective and to provide solutions to this resistance. Also, a broader assessment of the impact on existing jobs that autonomous driving might bring in the industry will be discussed. In order to fulfill that purpose, we will provide an overview of the current state of the technology discussed, as well as the notion of resistance to change and the solutions that exist to deal with it. We will also assess research on the potential impact on the jobs within the transport industry. Then, the results will provide insights on those three problems and will contribute to the research on autonomous driving and the resistance to change.
Based on the purpose of this thesis and the identified gaps in the current research, the following research questions have arisen:
1) What are the sources of resistance to change from a Logistics Service Provider perspective in regard to autonomous driving?
2) How to overcome the resistance to change towards autonomous trucks?
3) How will the professions within freight transport be impacted by the implementation of autonomous driving?
5 Delimitations
Different aspects of the technology will be discussed, and while the current research is mostly focused on passenger transport; this thesis will focus mainly on autonomous trucks and road transportation. It will also be focused on autonomous driving until the fourth level of automation, as fully autonomous vehicles are not expected to be available in a near future. Different aspects of the technology, such as liability, legal factors will not be extensively discussed within the research.
We have also researched from a business perspective, therefore, while there will be a summarized technological background, we will not cover it in detail.
Furthermore, the geographical focus of this thesis will be from the Logistics Service Providers based in France. We have chosen this country because of its high level of infrastructure and potential easiness for a successful implementation of autonomous driving, even if the necessary factors are not in place yet.
Structure
Our thesis is organized into seven chapters. Chapter 1 consists of the introduction and is followed by the literature review in Chapter 2. Then, we outline our inductive multiple case study and sampling in Chapter 3. In Chapter 4, we present the empirical findings of our research and proceed with the analysis in Chapter 5. Finally, we provide a conclusion and answer our research questions in Chapter 6 and discuss the implications and limitations of our study in Chapter 7.
6
Literature Review
The purpose of the literature review is to provide the theoretical background of this research and the research questions. Existing research about autonomous driving, autonomous trucks, their barriers, and opportunities. Literature about the resistance to change towards autonomous driving and the solutions to overcome those are also discussed.
To analyze the previous research on the topic of this thesis, a narrative literature review was conducted. This type of review provides a comprehensive, critical, and objective analysis of the current knowledge of a topic (Baker, 2016). Since the research questions are narrowed, this summarizes the previous literature on the subject and outlines the gaps and inconsistencies found in the research (Onwuegbuzie and Frels, 2016).
Autonomous driving
This section provides a wide overview of autonomous driving, with a definition, the current state, and the technology involved.
Definition and current state
There are different terms related to the idea of autonomous driving that are used. Automated driving, autonomous driving, and cooperative driving are terms that are broadly used with different characteristics (SMART, 2010). While automated driving and cooperative driving imply that there is still a need for a human driver that can take back control, the term autonomous driving comprises the end of automated driving, intending to get rid of the need for a human driving with full self-driving capability (SMART, 2010). This study focused on autonomous driving up to level 4 of automation, as outlined below.
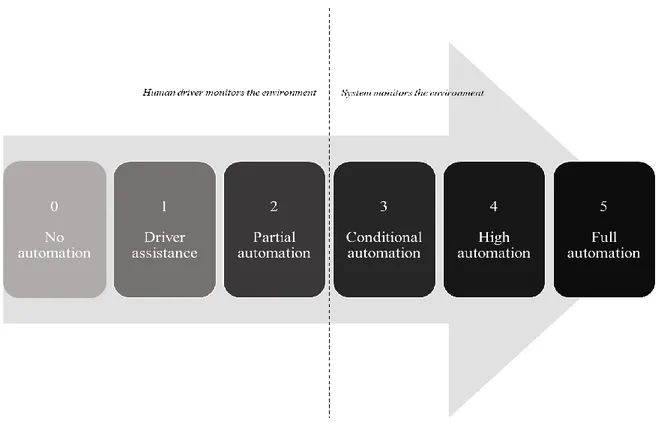
There are six levels of automation in autonomous driving and this definition has become standard (Deb et al., 2017). Those six levels are defined as follows (Deb et al., 2017; Gordon & Lidberg, 2015; Hancock, 2019; SAE, 2014;):
7
• Level 0: No automation. This is the case for most vehicles on the road today. They are manually controlled, and the human is doing all the tasks.
• Level 1: Driver assistance. This is the lowest level of automation. The vehicle possesses a single automated system for driver assistance, such as adaptive cruise control, to keep safe distances between vehicles.
• Level 2: Partial automation. This means that the vehicle can control steering and accelerating or decelerating.
• Level 3: Conditional automation. This represents quite a jump because a level 3 vehicle can analyze the environment and make decisions by itself. The driver can still override the system and take control at any time.
• Level 4: High automation. This is the level where there is technically no need for human interaction, as the vehicle can operate by itself, even in case of malfunctions. The human can still manually override the system if necessary. • Level 5: Full automation. This level does not require human intervention in any
case. Those vehicles do not have steering wheels or pedals as the vehicle can do everything.
8
Figure 1 shows a simplified version of the five levels of automation with the level of automation of each stage.
Figure 1. The different levels of automation (adapted from Hancock, 2019 & SAE, 2014)
Regarding the technology necessary for autonomous driving to operate, despite this study not being technical, a broad overview of the technical aspects is outlined by Rosique et al. (2019). The Driving Environment is monitored by the hardware part of the vehicles, which are the sensors, the communication systems, and the control tools. This hardware receives data from the software part that consists of three main parts, perception, planning, and control. All of those factors work harmoniously for the vehicle to work (Rosique et al., 2019). Existing autonomous vehicles have many sensors on board to detect objects and survey environments (Kong, 2020). There is a growing precision of those sensors, copying what has been done in the aerospace industry, and it can be argued that the higher the number of sensors is, the more accurate and reliable it becomes (Gordon & Lidberg, 2015; Yang et al., 2020). The increased computing power, the increased importance of the ability of information systems permits control of acceleration and steering and relative monitoring of the environment (Bagloee et al., 2016; Bracy et al., 2019; Csiszàr & Földes, 2018; Curiel-Ramirez et al., 2020).
9
The current state of autonomous driving has significantly evolved. While off-road, closed course automated driving applications already exist and are in place, in particular for mine hauling, container terminals, ports, airports, or warehouses (Kusumakar et al., 2018; Meyer & Beiker, 2019), it is usually separated from manned operations to prevent any safety issues (Kuzumakar et al., 2018). The technology has also improved, especially the progress made in the past decade, with the improvements in Artificial Intelligence and deep learning that led to the ability of computerized systems to learn by themself (Grigorescu et al., 2020). However, as mentioned above, the current applications of autonomous driving are still limited, and it can be argued that it is still in the infancy stage and that there are many things to consider and achieve before reaching maturity and mass implementation. (Bagloee et al., 2016; Grigorescu et al., 2020; Kusumakar et al., 2018). Saghir & Sands (2020) consider that there is still a lot of uncertainty around the deployment of autonomous driving technology on open roads at a commercial scale.
The current idea of mobility presumes that there is always human intervention, with the consequences that it implies, in matters such as liability and moral accountability (Riegler, 2019). However, with the technology, some manufacturers are developing a significant competitive advantage when using this new technology (Fagnant & Kockelman, 2015; Riehl, 2018; Skeete, 2018; Van Meldert & de Boeck, 2016). Over 30 car manufacturers are just a few years away from introducing autonomous vehicles to the mass market. Since autonomous vehicles are planned to change completely the way mobility is thought at this moment (Ryan, 2019), the academic interest, as well as the legal and ethical interest, are growing (Pettigrew et al., 2018; Raj et al., 2020), in particular on the topics of harmonization and standardization of regulations between states and countries (Meyer & Beiker, 2019).
Automation within logistics is also present. Logistics activities within warehouses are more completed by small robots instead of humans (Neugebauer, 2019) and autonomous trucks are already used within small and delimited areas like factories, logistics areas, or for last-mile deliveries (Neugebauer, 2019; Van Meldert & De Boeck, 2016). However, the use of autonomous vehicles within logistics is very limited and will increase in the next decades, but transport companies might be in danger if autonomous trucks are
10
becoming a standard in transportation activities since transport firms are not very innovative (Monios & Bergqvist, 2020).
Research and investment for autonomous trucks are increasing and will be used in several areas, from production to customer deliveries, to optimize logistics activities (Hjalmarsson-Jordanius et al., 2018). Full truck automation will allow piloting vehicles from a point A to a point B on long-distance routes (Fagnant & Kockelman, 2015; Maurer et al., 2016) with no human actions since artificial intelligence is taking the responsibility for stabilization, navigation, and guidance tasks (Maurer et al., 2016). Furthermore, autonomous trucks will communicate, give warnings and information to other vehicles of the fleet, as well as to drivers, but also react quicker than human drivers, stopping the vehicles faster (Greenstein, 2018) and avoid accidents (Maurer et al., 2016). As an example, autonomous trucks will leave to deliver the goods to end customers, operating days, and nights (Autonomous Trucks for Logistics Centers, 2018). However, warehouse employees will still be needed and will continue to load and unload trucks (Fagnant & Kockelman, 2015).
Autonomous trucks will make platooning technology work. Platooning is a technology where several trucks are driving behind each other at a close inter-vehicle distance using vehicle-to-vehicle communication, reducing air resistance, and therefore saving fuel (Alam et al., 2015). Before autonomous trucks are commonly used on roads, this technology still needs to be tested in real conditions within delimited areas search as companies’ sites, where there is not a lot of traffic and other road users know that the technology is used on these roads (Autonomous Trucks for Logistics Centers, 2018).
Opportunities & Barriers
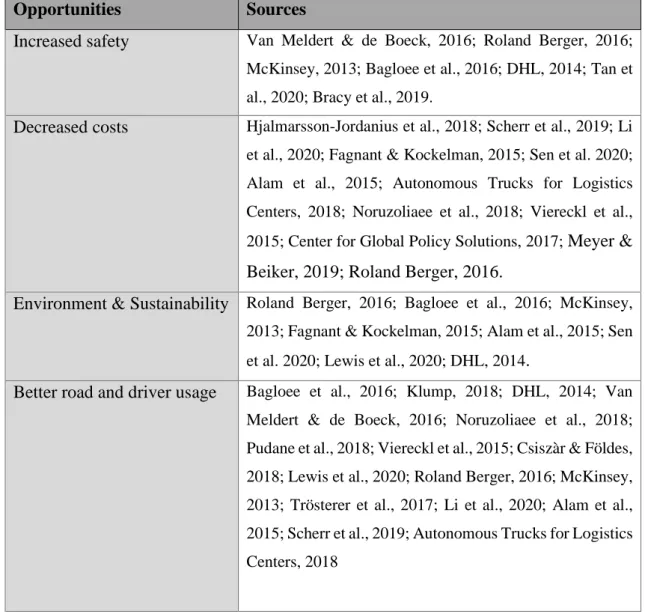
Research on autonomous driving, including within logistics, discusses the benefits and opportunities of the technology is growing. The most common opportunities found in the literature are increased safety, decreased costs, the environment, and better road and driver utilization (Roland Berger, 2016).
11
Table 1 shows the most recognized opportunities of that technology, as elaborated by different authors.
Opportunities Sources
Increased safety Van Meldert & de Boeck, 2016; Roland Berger, 2016; McKinsey, 2013; Bagloee et al., 2016; DHL, 2014; Tan et al., 2020; Bracy et al., 2019.
Decreased costs Hjalmarsson-Jordanius et al., 2018; Scherr et al., 2019; Li et al., 2020; Fagnant & Kockelman, 2015; Sen et al. 2020; Alam et al., 2015; Autonomous Trucks for Logistics Centers, 2018; Noruzoliaee et al., 2018; Viereckl et al., 2015; Center for Global Policy Solutions, 2017; Meyer & Beiker, 2019; Roland Berger, 2016.
Environment & Sustainability Roland Berger, 2016; Bagloee et al., 2016; McKinsey, 2013; Fagnant & Kockelman, 2015; Alam et al., 2015; Sen et al. 2020; Lewis et al., 2020; DHL, 2014.
Better road and driver usage Bagloee et al., 2016; Klump, 2018; DHL, 2014; Van Meldert & de Boeck, 2016; Noruzoliaee et al., 2018; Pudane et al., 2018; Viereckl et al., 2015; Csiszàr & Földes, 2018; Lewis et al., 2020; Roland Berger, 2016; McKinsey, 2013; Trösterer et al., 2017; Li et al., 2020; Alam et al., 2015; Scherr et al., 2019; Autonomous Trucks for Logistics Centers, 2018
Table 1: Opportunities of autonomous driving
There is a consensus in research that widespread implementation of autonomous vehicles, both for private and freight transportation, will lead to a significant decrease in accidents on the road, due to the technology but also by removing the risk of human error (Bagloee et al., 2016; DHL, 2014).
Another advantage of autonomous trucks will be the decrease in costs for transport companies (Hjalmarsson-Jordanius et al., 2018). Labor costs will be reduced (Li et al., 2020; Scherr et al., 2019) since the need for drivers will be lower (Fagnant & Kockelman, 2015). Second, since the number of accidents involving trucks will decrease, damages
12
and repairing costs will be reduced (Autonomous Trucks for Logistics Centers, 2018). Fuel consumption and costs will also decrease (Alam et al., 2015; Fagnant & Kockelman, 2015; Sen et al. 2020).
Due to the decreased fuel costs with the idea that autonomous vehicles would be electric (Roland Berger, 2016), there are some environmental and sustainability opportunities that would arise with the use of autonomous vehicles. There will be a travel time reduction so less usage of vehicles and less congestion, which is responsible for a significant amount of air pollution in urban areas (Bagloee et al., 2016; McKinsey, 2013).
Autonomous driving also brings the opportunity for better road and driver utilization (Bagloee et al., 2016). As drivers can perform non-driving activities when on their way to their destination (Noruzoliaee et al., 2018; Van Meldert & de Boeck, 2016). Those activities could be productive and therefore the opportunity arises that the travel time is not lost, and administrative tasks can be performed during this travel time (Pudane et al., 2018; Viereckl et al., 2015). In terms of road utilization, autonomous vehicles can move closer together than human-driven vehicles, so the road capacity is increased, which would lead to reduced traffic and congestion (Noruzoliaee et al., 2018). Also, since the operation time of the vehicles is increased, the traffic would also be diluted during the day and not only during business hours, and therefore, fewer vehicles are needed, so there are fewer accidents, less damage, and less traffic, which represents an opportunity for the future and improve mobility for all (Csiszàr & Földes, 2018; Fagnant & Kockelman, 2015; Lewis et al., 2020; McKinsey, 2013; Roland Berger, 2016).
There are also other opportunities from introducing autonomous driving that do not fit in the previous categories. The technology offers the opportunity to be transparent with the public to implement new solutions in autonomous driving (König & Neumayr, 2017), as including the customers and all the stakeholders involved in the process of development would permit a more successful implementation (Wintersberger et al., 2019). Liu & Xu (2020) argue that direct experience is an opportunity to promote the technology and provide positive attitudes and easier diffusion and that the perception of the technology will be less distorted (Kohl et al., 2018).
13
Introducing autonomous driving also brings opportunities to change the way mobility is thought (Amini et al., 2019). Even though there are many factors to consider, such as the social and technological ones (Natjuk et al., 2020), there are many opportunities, especially in the idea of sharing vehicles, to use them only when needed (Ryan, 2019) and changing completely the idea of vehicle ownership towards a more standard and shared road environment (Saghir & Sands, 2020).
Moreover, autonomous trucks will drive and deliver twenty-four hours, seven days a week (Autonomous Trucks for Logistics Centers, 2018; Li et al., 2020), but also will not be impacted by weather the same as human drivers are (Li et al., 2020), disrupting deliveries less and making transportation companies far more flexible (Li et al., 2020). It will also develop better customer relationships (Fritschy & Spinler, 2019; Neuweiler & Riedel, 2017) because delivery dates and times will better meet customers’ requirements and scheduled deliveries will arrive on time, enhancing their satisfaction (Fritschy & Spinler, 2019).
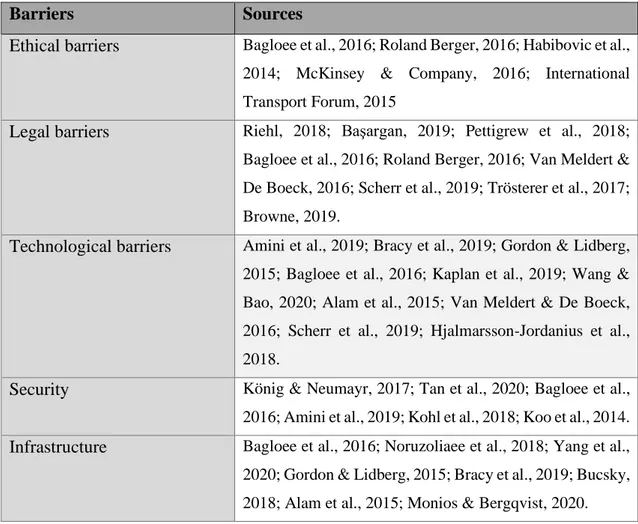
On the other hand, there are some concerns and barriers that arise from this new technology. The concerns are very pronounced and across all scope of the technology (Wintersberger et al., 2019). Some issues and barriers have to be addressed to successfully integrate the technology, such as ethical, legal, technological barriers, as well as security and infrastructure barriers (Van Meldert & de Boeck, 2016).
14
Table 2 shows the major barriers coming with that technology and the authors who researched that matter.
Barriers Sources
Ethical barriers Bagloee et al., 2016; Roland Berger, 2016; Habibovic et al., 2014; McKinsey & Company, 2016; International Transport Forum, 2015
Legal barriers Riehl, 2018; Başargan, 2019; Pettigrew et al., 2018; Bagloee et al., 2016; Roland Berger, 2016; Van Meldert & De Boeck, 2016; Scherr et al., 2019; Trösterer et al., 2017; Browne, 2019.
Technological barriers Amini et al., 2019; Bracy et al., 2019; Gordon & Lidberg, 2015; Bagloee et al., 2016; Kaplan et al., 2019; Wang & Bao, 2020; Alam et al., 2015; Van Meldert & De Boeck, 2016; Scherr et al., 2019; Hjalmarsson-Jordanius et al., 2018.
Security König & Neumayr, 2017; Tan et al., 2020; Bagloee et al., 2016; Amini et al., 2019; Kohl et al., 2018; Koo et al., 2014. Infrastructure Bagloee et al., 2016; Noruzoliaee et al., 2018; Yang et al.,
2020; Gordon & Lidberg, 2015; Bracy et al., 2019; Bucsky, 2018; Alam et al., 2015; Monios & Bergqvist, 2020.
Table 2: Barriers of autonomous driving
The ethical barriers represent a challenge for implementing autonomous trucks. As the vehicle has the potential to decide in a split second what it is going to perform, there some ethical issues if the vehicle is facing a situation where danger is inevitable and a life and death situation has to be made (Habibovic et al., 2014; Roland Berger, 2016).
There are also legal challenges in the implementation of autonomous driving. The question of how laws and regulations will apply to the technology are various and should be taken into consideration, as the technology is evolving completely, legislators in various countries have not yet set regulations on how autonomous driving will be implemented, especially regarding standardization and liability (Başargan, 2019; Riehl, 2018).
15
The technological barriers have to be considered, autonomous vehicles need to include autonomous acceleration and steering, monitoring the environment, and respond in a short time to a dynamic driving environment with no human intervention, and this requires a lot of research and testing (Bracy et al., 2019).
Bagloee et al. (2016) also mention that there is security and safety as a barrier to implementing autonomous driving. Security and integrity of the systems are of paramount importance, as the consequences could be disastrous (Amini et al., 2019; Bagloee et al., 2016).
The next barrier to implementing autonomous driving is the need for large infrastructure (Bagloee et al., 2016). On top of the sensors in the autonomous vehicles, there should be also roadside sensors that have been proven to be equally important to ensure that the vehicle can operate in all conditions (Gordon & Lidberg, 2015; Yang et al., 2020).
There are also cost barriers to introducing autonomous driving. As the initial investment needed to implement the technology for the different actors in the industry is high, and the high cost of the sensors and the technology is also a big barrier to the widespread adoption of the technology (Kong, 2020; Noruzoliaee et al., 2018).
Impact on the industry
The industry of autonomous trucks will face continuous growth in the next years (Bucsky, 2018) but there is a general lack of trust within companies and drivers because of the implementation and training costs (Trösterer et al., 2017), but also because professionals are afraid of an increase and long-term unemployment in the transport industry (Gittleman & Monaco, 2020; Hassler, 2017), opening debates about new technologies that are not new (Hassler, 2017). However, according to some studies, the impact of this new technology will differ from the others (Gittleman & Monaco, 2020).
A modification of the transport market will probably be observed. Actual significant customers of logistics service providers, such as Amazon or Uber that are already investing in autonomous vehicles, will probably take responsibility for their transportation activities and create their fleet of vehicles, leading to the extinction of small
16
transport firms (Monios & Bergqvist, 2020; Neuweiler & Riedel, 2017). These will not be able to be competitive against artificial intelligence anymore and small companies will need to adjust themselves and shift to new markets (Neuweiler & Riedel, 2017). They may not disappear completely, but go into more specific or niche markets (Neuweiler & Riedel, 2017), be specialized in the last mile delivery tasks since both humans and technology will be needed (Li et al., 2020), as well as cooperate with other logistics service providers (Fritschy & Spinler, 2019; Neuweiler & Riedel, 2017). Cooperation between different Logistics Service Providers that possess, or not, autonomous trucks will develop the “truck sharing”, improving capacity utilization, reducing fuel costs through platooning, and therefore increasing the efficiency of all of them (Fritschy & Spinler, 2019). Autonomous trucks will not only disrupt transport companies but the whole logistics industry (Neuweiler & Riedel, 2017).
On one hand, autonomous trucks will have negative impacts on driving jobs. The adoption of autonomous trucks will lead to a social cost and millions of truck drivers will lose their jobs since the technology will replace humans (Bucsky, 2018; Fritschy & Spinler, 2019; Van Meldert & De Boeck, 2016). Studies show that the public knows about the potential job losses that may occur and impact the driving industry if autonomous driving is implemented, and therefore has a lot of concerns about it (Pettigrew et al., 2018).
The population will be affected differently according to their tasks, groups, and areas (Center for Global Policy Solutions, 2017; Chinoracký & Čorejová, 2019). In the OECD area, around 45% of current jobs have a significant or high risk of automation in the future. The most impacted driving professions would be the delivery and heavy truck drivers, as well as bus and taxi drivers (Center for Global Policy Solutions, 2017; Chinoracký & Čorejová, 2019). The geographical impact will also differ from a state to another, so will also be different from a country to another, since the regions where the driving jobs are massively employing and better paid will be more impacted by unemployment if autonomous cars and trucks are quickly implemented, such as eastern and southern countries in Europe (Center for Global Policy Solutions, 2017; Chinoracký & Čorejová, 2019). Another disadvantage of autonomous driving is that truck drivers, that will still be needed at the beginning, will be driving more, increasing their lack of contact with other people and their loneliness (Trösterer et al., 2017).
17
However, the numbers regarding the job’s losses can be balanced since the unemployment due to autonomous driving will be more limited than presented (Gittleman & Monaco, 2020). The number of trucks drivers that will be impacted by the computerization of driving tasks is far less than calculated, due to the confusion between the different kind of driving classification system (Gittleman & Monaco, 2020), as well as the number of requirements of this technology and regulations to let autonomous trucks operate within a public space (Gittleman & Monaco, 2020). The tasks of truck drivers are not only limited to driving since truck drivers also must accomplish non-driving assignments that are less going to be impacted by implementing autonomous trucks (Gittleman & Monaco, 2020; Pettigrew et al., 2018). Finally, even if the fourth and fifth levels of automation replace drivers, the need for drivers will not be entirely excluded (Gittleman & Monaco, 2020).
On the other hand, even if most of the literature is discussing the disadvantages more than the advantages of autonomous trucks on driving jobs, and the public is aware that the technology will cut but also create new job opportunities (Pettigrew et al., 2018). The first advantage of the implementation of autonomous trucks is that the actual shortage of truck drivers (Fritschy & Spinler, 2019; Meahl, 2017), because of their retirement and the lack of attractiveness for these jobs within the young generation (Meahl, 2017), will be overcome and logistics service providers will be able to meet the constantly increasing demand for transport. Since the need for drivers will still exist, semi-autonomous and fully autonomous trucks will increase the comfort and the safety of truck drivers (Li et al., 2020; Van Meldert & De Boeck, 2016), but also the safety of the others on the road (Li et al., 2020). Another advantage emphasized is that even if the adoption of autonomous trucks will increase the travel time of drivers (Pudāne et al., 2018), if the autonomous trucks are well managed and properly used, it may on the contrary lead to a decrease in travel time, enabling truck drivers to come back home more often (Pudāne et al., 2018). Furthermore, autonomous vehicles will improve interaction within the same fleet thanks to the technology (Trösterer et al., 2017), making the drivers' job easier and enabling truck drivers to increase their productivity and be more efficient (Pettigrew et al., 2018).
18
Another impact of the adoption of autonomous trucks is the modification of the drivers’ tasks instead of the total extinction of them (Neuweiler & Riedel, 2017). Autonomous vehicles question the requirements to control the trucks and the education of the drivers. At the beginning of the transition, automation might be partially used, for a specific time or conditions (Maurer et al., 2016), enabling drivers to perform other tasks in parallel when the fully autonomous mode will be activated (Li et al., 2020; Maurer et al., 2016; Pudāne et al., 2018), increasing their productivity and sparing them time instead of losing this time while driving (Pudāne et al., 2018). According to the literature, drivers will do some administrative tasks and paperwork (Maurer et al., 2016; Trösterer et al., 2017). Drivers may need higher skills to monitor the vehicles or perform these other tasks while they are driving (Van Meldert & De Boeck, 2016). It will give the opportunity drivers to discuss more with transport scheduler (Trösterer et al., 2017), or do more maintenance, repairing, or even manufacturing tasks than before and that cannot be replaced by technology (Li et al., 2020; Sen et al., 2020). Therefore, it can be concluded that the organization, as well as the tasks of schedulers, customers, and truck drivers, will change drastically (Trösterer et al., 2017) and that drivers’ task will move from an operational aspect to a more strategic or supervision function (Fritschy & Spinler, 2019; Li et al., 2020; Maurer et al., 2016).
Resistance to change
Fears concerning the reliability of autonomous cars and trucks are generalized over the population, with different concerns and despite the obvious advantages (Adnan et al., 2018; Hoff & Bashir, 2014; König & Neumayr, 2017; Wintersberger et al., 2019). According to the literature, drivers are not feeling comfortable using autonomous vehicles (Raj et al., 2020), have difficulties accepting changes within their work environment (Ruiner & Klumpp, 2020), and do not rely on vehicle manufacturers (Kohl et al., 2018). To overcome these feelings, it has been underlined that trust toward technology is the key success factor to reach acceptance of autonomous vehicles from the public (Adnan et al., 2018; Başargan, 2019; Hoff & Bashir, 2014), but change should be first correctly understood.
19 Change definition
A change is made up of the analysis of a situation, leading to a change process and then to the change benefits (Change Management, 2007). Change management is defined as “the planning and introducing of new processes, methods of working, etc. in a company
or organization” (Cambridge Dictionary, n.d) and is under the responsibility of a change
agent that is charged with introducing and managing the change process (Tschirky et al., 2011). According to Appelbaum et al. (2012) and Kotter (2008), it is crucial to managing a change process to avoid failures of good initiatives. Change can be slow or fast (Kotter, 2008), planned or unplanned. Planned changes are chosen and come from a companies’ decision, for example, because of performance gaps or new technology on the market, while unplanned, also called reactive change, occurs when a firm is forced to change its way to work, such as during a crisis, and can come from external (i.e. regulations, demand) as well as internal forces (i.e. strategy, stakeholder, collaboration) (Change Management, 2007). Autonomous driving seems to be considered a slow planned change.
It has been identified that there are usually four rooms of change between now and the desired situation: satisfaction of what is going on; censorship, where the old is defended but a change is considered; confusion (i.e., acceptance, changing point); and renewal (Janssen, 1996). Since approaching change is difficult and doubtful, it is recommended to first understand the speed and the type of the change, and then cope with the different resistances by using different approaches to overcome it correctly (Kotter, 2008).
20
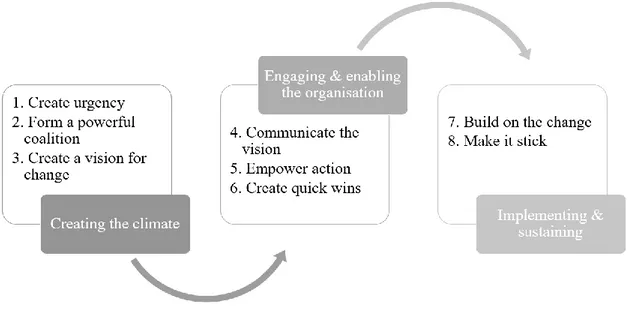
Several change models have been developed to successfully implement a change process and achieve its goals, such as Kotter’s change model (2008) constituted of eight steps and summarized in the following figure:
Figure 2. The eight steps of change (adapted from Kotter, 2008)
Trust
Trust was originally a connection between individuals and occurred through the faith in strangers (Hoff & Bashir, 2014). As an example, companies, communities, or governments are based on trust between each actor (Hoff & Bashir, 2014). However, trust is not only about confidence between individuals, but also refers to “the way people
interact with technology” according to (Hoff & Bashir, 2014). This trust factor differs
from a sociodemographic group to another, making it more difficult to install trust between machines and people (Adnan et al., 2018). If humans and machines are working well together, the performance of labor forces and companies is high (Hoff & Bashir, 2014). If their teamwork is not optimal, even the easiest assignments are being complicated (Hoff & Bashir, 2014).
There is a general trust issue (König & Neumayr, 2017) regarding artificial intelligence within the society, and between drivers and machines (Van Meldert & De Boeck, 2016). The programming of computers to make life and death decisions currently constitutes a significant obstacle to developing autonomous driving technology on a larger scale (Bucksy, 2018), as well as being accepted by the future companies using it. Drivers may
21
have to collaborate with artificial intelligence at the beginning (semi-autonomous vehicles), which supposes an acceptance of technology instead of skepticism (Klumpp, 2018). Another trust issue is the question of the safety of the technology since the system can malfunction or be hacked (König & Neumayr, 2017).
Trust is therefore one of the biggest barriers to implementing autonomous trucks, and need to be seriously taken into consideration, but other factors of resistance toward this technology are also important to study. As seen previously, the ethics, trustworthiness, costs, privacy, and safety of autonomous vehicles are also creating resistance to this technology (Başargan, 2019; Kohl et al., 2018; König & Neumayr, 2017; Tan et al., 2020; Wintersberger et al., 2019). Technology is perceived in two different ways by the public. On one hand, it can increase peoples’ freedom and their self-management (Ruiner & Klumpp, 2020) and can be seen as leisure to use it or some help to increase own performances (Ruiner & Klumpp, 2020), encouraging its acceptance (Klump, 2018). On the other hand, technology can be perceived as a tool to control the efficiency of the workforce (Ruiner & Klumpp, 2020), decreasing its acceptance (Klump, 2018). Another factor that is slowing the acceptance of autonomous vehicles is the passion for driving from cars and truck users (Kohl et al., 2018).
The more a user must give control to a machine, the lower is the acceptance regarding its implementation. For example, platooning or navigation control that still need a driver are facing an average resistance, while full automation of trucks driving is challenging a very high resistance (Klump, 2018). Humans have difficulties losing control on tasks they are used to perform, increasing their resistance (Kohl et al., 2018; Raue et al., 2019).
Safety and trust are recognized as the two major reasons there is a high resistance regarding autonomous trucks within the public (Adnan et al., 2018; Hoff & Bashir, 2014; König & Neumayr, 2017; Wintersberger et al., 2019). Future studies and involved actors need to focus more on these factors to find solutions (Adnan et al., 2018) because if resistance to autonomous trucks is still existing while it is implemented, it would mean that users’ apprehensions have not been heard, its acceptance will be then slow and difficult (Kohl et al., 2018).
22 Models and factors
Several models to understand resistance to change and trust have been emphasized in the literature and need to be apprehended.
Resistance to change is composed of “a multidimensional disposition that comprises
behavioral, cognitive, and affective components” and is linked to people’s character
(Oreg, 2003; Raue et al., 2019). Nastjuk et al. (2020) underlined that three key elements, “social influence, individual differences, and system characteristics”, are affecting acceptance of autonomous vehicles (Nastjuk et al., 2020). “Subjective knowledge” and “experience” are also a factor that might have effects on individuals’ receptivity regarding a new tool (Raue et al., 2019).
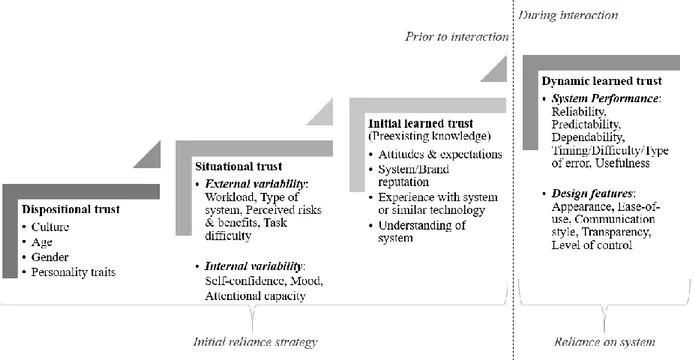
Regarding trust, Hoff & Bashir (2014) created a model to better understand the complexity and the dynamic process of trust, as well as its three aspects influencing human-automation trust: “dispositional trust, situational trust, and learned trust” (Hoff & Bashir, 2014). Dispositional trust is referring to individuals’ characteristics like their gender or age, while situational trust is influenced by internal and external variables such as self-confidence and attentional capacity (internal), or type of system, workload, and perceived risks (external) (Hoff & Bashir, 2014). Learned trust however is based on initial knowledge like the reputation and experience of the system and is completed by dynamic learning composed of system performances (e.g., reliability, usefulness) as well as design features (e.g., ease-of-use, level of control), gathered while users are interacting with the technology (Hoff & Bashir, 2014).
23
Figure 3 shows a simplified version of the different factors that impact trust regarding autonomous technologies (Hoff & Bashir, 2014).
Figure 3: Factors that influence trust in automation (adapted from Hoff & Bashir, 2014).
It is the relation between all these elements and factors that humans are building trust and developing acceptance for autonomous vehicles. This is, therefore, essential that they are understood by all actors to implement this innovation.
Analysis of resistance
Resistance towards autonomous cars and trucks has been studied in real situations in the literature, providing some data and examples about resistance. First, it has been found that more than 70% of Americans are anxious about using an autonomous vehicle (Raj et al., 2020), especially women (Wintersberger et al., 2019). Men and young people are more interested in using fully autonomous vehicles (Deb et al., 2017; Ruiner & Klumpp, 2020). Even if people living in urban areas and rural areas are all well informed about autonomous vehicles technology (Wintersberger et al., 2019), people from cities or familiar with innovations are more willing to accept and use autonomous vehicles (Deb et al., 2017; Nastjuk et al., 2020). Last, the probability that people having ecological values accept autonomous vehicles on roads is higher than the population not feeling concerned about climate change (Nastjuk et al., 2020).
24
Several studies highlighted four components influencing acceptance to change: routine seeking, emotional reaction to imposed change, short-term focus, and cognitive rigidity (Oreg, 2003). The perception of technology influences the intention to use it (Nastjuk et al., 2020). The lower risks of using autonomous vehicles are perceived by people, but also the higher personal benefits are recognized, the higher is peoples’ receptivity (Raue et al., 2019). Personal advantages for the technology appear through several criteria: the compatibility of actual traveling behavior, the perceived easiness, and usefulness, as well as a low level of disruption and habit alterations of the individual (Nastjuk et al., 2020). When a pleasure to use technology is noticed, people are more willing to cooperate with it (Nastjuk et al., 2020). When people are more receptive to automation, they are more likely to use it or feel comfortable sharing the road with autonomous vehicles, including pedestrians that also should be taken into consideration in the process of acceptance (Deb et al., 2017).
Resistance or acceptance to change is also created by information and news peoples have access to, so individuals with no experience and knowledge in this technology are influenced by the opinion of others (Nastjuk et al., 2020). Therefore, positive information about autonomous vehicles is increasing the perceived advantages of an individual, while updates about safety issues of autonomous vehicles are intensifying the risk perception, slowing the acceptance of the change (Kohl et al., 2018). On the contrary, if risks are underestimated compared to benefits, autonomous vehicles may be mishandled or lead to dissatisfaction of customers, leading to dangerous behaviors and decline of acceptance (Kohl et al., 2018).
Another factor affecting resistance to change is the control of vehicles: people using self-driving vehicles feel safer and more comfortable with the technology if they can take the control of the vehicle easily when they feel the need (König & Neumayr, 2017). Users also need to know how it works and why vehicles are doing each action if they cannot control the vehicle themselves (Koo et al., 2014). Two types of information could be provided to drivers while they are using autonomous vehicles: a “how” message providing information about the actions done, and a “why” message providing information about the reason for the actions (Koo et al., 2014). If only the “how”
25
information is provided, drivers are confused and their driving performance might not be safe, because they have difficulties understanding if they are or if the vehicle is responsible (Koo et al., 2014). However, providing “why” information was better perceived by drivers and resulted in good performances, which has been recognized as the ideal amount of information (Koo et al., 2014). Giving both messages to drivers was the safest solution to make humans and machines work together perfectly, but it was less well perceived by users and was intensifying their negative perception of the technology (Koo et al., 2014). When drivers are using autonomous vehicles, the fear to give control without understanding the technology is negatively influencing drivers’ receptivity and their intention to employ autonomous vehicles (Koo et al., 2014; Nastjuk et al., 2020).
Overall, the conducted studies have highlighted that even if people perceived the benefits of autonomous vehicles and recognized that this technology is safer than humans driving, they are still reluctant to use it and welcome it in their driving zones (Deb et al., 2017). Furthermore, when the weather is bad, drivers do not trust autonomous vehicles and prefer to drive instead of giving up control, and even if the weather is good, drivers are still focused on the road in case of danger (Tan et al., 2020). Even if people are used to consuming high-technological goods, many people have never experienced autonomous driving and only have little knowledge about it (Raue et al., 2019). However, real-life trials made testers change their opinion in a more positive way regarding autonomous vehicles they just tried (Liu & Xu, 2020). People are therefore still lacking information and knowledge about autonomous driving and practical experiences are more than needed to develop the acceptance of autonomous vehicles from the public (Ruiner & Klumpp, 2020).
Solutions to overcome resistance and built trust
The literature provides several solutions to overcome resistance to autonomous vehicles. One of the first keys is the understanding of public resistance by manufacturers and governments. Drivers’ inclinations, trust, and reluctance, but also how they are judging the technology and what is affecting their receptivity, need to be understood and analyzed to take actions and improve their acceptance before the technology is launched (Başargan, 2019; Raue et al., 2019). It is very important to understand it since autonomous vehicles are taking some tasks that humans are used to be responsible for (Raue et al., 2019).
26
Furthermore, understanding which and how driving jobs could be impacted by this automation, but also how the technology will disturb peoples’ autonomy and control feelings, is needed to adapt its development (Raue et al., 2019). Individuals must participate in the development of autonomous vehicles to be fully understood and therefore make their concerns recognized by creators (Wintersberger et al., 2019).
Another success factor is to gradually implement and inform people to decrease resistance. Platooning is therefore highly recommended to start with the implementation of autonomous vehicles because this technology still needs drivers and is only based on trucks that are following each other (König & Neumayr, 2017; Maurer et al., 2016). If this implementation works well, people will be less reluctant to welcome other forms of autonomous vehicles (König & Neumayr, 2017; Maurer et al., 2016). A right and gradual amount of information regarding autonomous vehicles must be addressed to the public, avoiding the overwhelming of individuals but still providing transparency about the technology (König & Neumayr, 2017; Koo et al., 2014). This needs to be done before implementing autonomous vehicles and within the vehicle itself to make users more comfortable and understand the technology they are using (Koo et al., 2014). Interaction between humans and machines is essential (Koo et al., 2014).
Training and experiences would also overcome resistance. People need to understand the technology and be well-informed before using it (Başargan, 2019). To overcome resistance from the beginning, it is important to provide the public the opportunity to test prototypes and become familiar with autonomous vehicles at each stage of technology’s improvements (Başargan, 2019; Kohl et al., 2018; Liu & Xu, 2020; Raue et al., 2019). Three steps are leading to a successful autonomous vehicles’ implementation, starting from making exploration of artificial intelligence public and accessible, and then its evolution, to the recruiting and training phase (Kolbjørnsrud et al., 2017). People need to be involved in the technology's development to increase their acceptance and trust towards autonomous vehicles (Kolbjørnsrud et al., 2017).
Linked to the involvement of the public and information provided, communication strategies should be adapted, transparent, and show the benefits but also the risks of autonomous vehicles (Klump, 2018; Kohl et al., 2018; König & Neumayr, 2017). People
27
should not misunderstand this technology; for that reason, benefits cannot be over-presented besides risks (Kohl et al., 2018). The overestimation of autonomous driving advantages, as well as the underestimation of risks, could reverse the expected results on individuals’ resistance in the mid-to-long term (Kohl et al., 2018). Communication and marketing strategies are therefore very important and autonomous vehicles should be well represented within media to inform people as much as possible, and hence earn their trust gradually (Başargan, 2019). This promotion must be done before, but also after introducing autonomous vehicles on roads to increase their adoption and therefore reach economies of scale and an acceptable selling price (Nastjuk et al., 2020; Tan et al., 2020).
Several actors are involved, have strategic roles, and need to work together to overcome resistance (Raj et al., 2020). Governments and policymakers play a huge role in the adoption of autonomous vehicles and if they are resisting the technology, it will be then very difficult to gain public acceptance (Raj et al., 2020; Tan et al., 2020). If politicians help manufacturers to develop autonomous driving, through support for its production or the implementation of positive regulations, the acceptance of the public will be easier and faster to reach (Raj et al., 2020). The vehicle manufacturers also have a key role to play besides building these vehicles: they need to consider the concerns of future users and involve them in the construction (Kohl et al., 2018). Within work organizations, managers are important in the acceptance process of their workers and need to help them to understand autonomous vehicles through training, provide the information, and understand their resistance (Kolbjørnsrud et al., 2017; Raj et al., 2020; Ruiner & Klumpp, 2020).
If all these actors are working together, playing a positive role in implementing autonomous vehicles, and understanding the peoples’ concerns before its launch, their technology acceptance, as well as their trust, should be quicker than expected (Kohl et al., 2018).
Conclusion
Overall, the implementation of autonomous trucks has high potential (Neugebauer, 2019), having more strengths than weaknesses (Hjalmarsson-Jordanius et al., 2018), and receives high interest (Kassai et al., 2020). Its generalized use will not only affect the
28
transportation activities but the whole logistics industry in the next decades (Bucsky, 2018; Heutger & Kückelhaus, 2014; Van Meldert & De Boeck, 2016), and will have a very positive impact on the environment (Sen et al. 2020).
The general advantages of autonomous cars are also applying to autonomous trucks (Fagnant & Kockelman, 2015), and implementing this technology will drastically and positively change logistics activities, which will create value within logistics chains (Hjalmarsson-Jordanius et al., 2018). Autonomous electric trucks would be the next step of the implementation of this technology, creating even more cost advantages and environmental positive impact (Bucsky, 2018; Fritschy & Spinler, 2019; Sen et al. 2020), but also developing employment to cover the need for maintenance and repairing tasks, making the technology even more sustainable (Sen et al. 2020). Logistics Service Providers will gain competitive advantages by using fully autonomous driving if automation is rapidly implemented (Van Meldert & De Boeck, 2016), through the increased customer service and the reinforcement of customer relationships (Neuweiler & Riedel, 2017) as well as the cost savings. A last benefit of autonomous vehicles is that it enables the economy to continue to work without disruptions caused by humans, like experienced at the beginning of the year 2020 (Li et al., 2020).
There are however still steps and ethical, legal, and technical barriers and challenges to overcome before gaining the highlighted advantages (Greenstein, 2018; Kassai et al., 2020; Neuweiler & Riedel, 2017). Resistance to change and the low acceptance of the public is one of the main barriers to implementing autonomous vehicles (Raj et al., 2020) and is therefore crucial to be understood by the different actors (Klump, 2018). Research showed the influence of social, individual, and system features on acceptance, as well as the link between trust and intention to use a technology (Nastjuk et al., 2020). Communication, information, and policies will also play a key role in the process of acceptance (Başargan, 2019). Even if innovation is great and can positively revolutionize peoples’ life, its implementation can be unsuccessful when the public is not accepting it. Consequently, it should not be underestimated (Kohl et al., 2018).
Furthermore, the implementation of autonomous trucks will impact negatively as well as positively the drivers’ job and transport markets, and anticipation will be needed to
29
minimize the negative impacts and the job losses within the industry and make the transition smoother (Center for Global Policy Solutions, 2017; Pettigrew et al., 2018). To mitigate the negative effects, several actions are needed. First, employees need to be an entire part of the discussions regarding the implementation of autonomous driving within the companies and with the different political actors (Center for Global Policy Solutions, 2017; Pettigrew et al., 2018). In addition, it is necessary that all societal actors, meaning the companies’ stakeholders, the governments, and the communities, collaborate, communicate, and take decisions together regarding the generalized use of autonomous trucks, to anticipate all changes and prepare all impacted jobs for the transition to this technology (Center for Global Policy Solutions, 2017; Pettigrew et al., 2018). An immediate start of labor market planning is therefore required. Moreover, the drivers and the future workers will need new training to adapt themselves to different positions that will require different skills, and recruitment programs will also need to be adjusted to the combination of tasks workers will perform (Pettigrew et al., 2018). Some examples of policies that must be taken by politics to minimize the job losses and give workers the chance to sustain their economic situations: increase the unemployment insurance, improve education and apprenticeship programs, and make it cheaper, or support the entrepreneur’s status (Center for Global Policy Solutions, 2017).
The way to mass implementation of autonomous driving is still paved with pitfalls that all stakeholders should address. The technology needs to continuously be improved, even after its first introduction, to generalize the use of autonomous trucks (Simpson et al., 2019). According to Simpson et al. (2019), if the technology progress quickly, its benefits will be better recognized, and autonomous trucks will gain the trust of the public. But if the technology does not evolve, bad publicity will be prominent (Simpson et al., 2019). The opportunities mentioned above can be achieved, should the mentioned barriers of autonomous driving be overcome. A slow and gradual implementation is therefore expected, starting with few autonomous tasks that are currently used and semi-autonomous trucks, before reaching full automation (Bucsky, 2018; Neuweiler & Riedel, 2017). Mixed fleets on roads, involving manual and autonomous cars as well as trucks, will appear soon, which might create confusion (Scherr et al., 2019). However, according to Scherr et al. (2019), it will create benefits for everyone within the urban road environments.
30
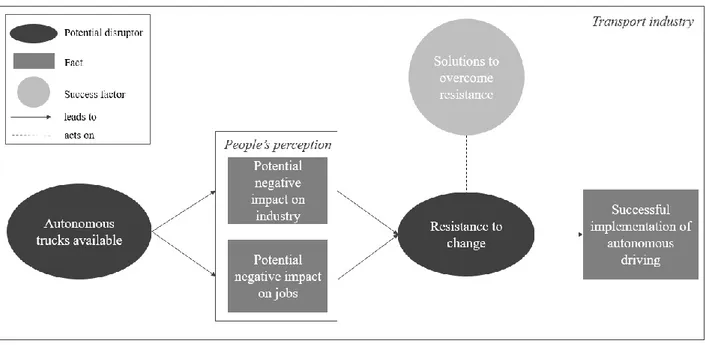
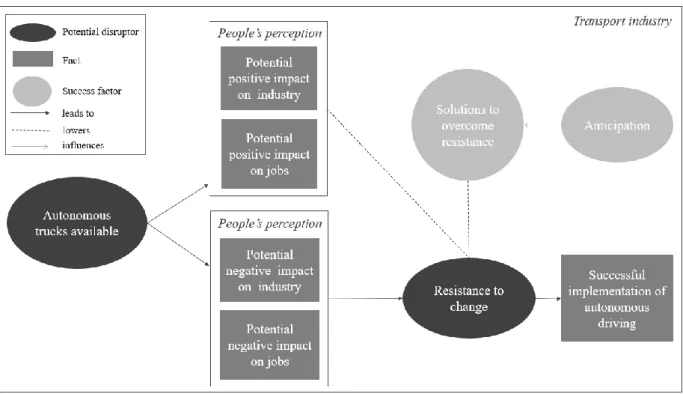
Even if the forecasting of new technologies is difficult (Mitrea & Kyamakya, 2017), autonomous driving will be generalized by 2040, mainly through cooperation between Logistics Service Providers and the sharing of autonomous trucks between them (Fritschy & Spinler, 2019). Although current research is focusing more on autonomous passenger transportation, autonomous vehicles within logistics activities will probably be used earlier than autonomous cars and buses because it is easier to implement, but it also faces fewer liability concerns (Van Meldert & De Boeck, 2016). Starting to implement autonomous trucks may decrease the lack of trust of the public and make the adoption of autonomous passenger transportation easier than expected (Van Meldert & De Boeck, 2016). Figure 4 presents the conceptual model of this thesis.
Figure 4: Conceptual model
Following our literature review, it can be concluded that the availability of autonomous trucks will be a disruption within the transport industry. People might only perceive the negative impacts on the industry and the jobs within it. Due to this negative perception, another disruption will arise: the resistance to change towards the technology. For a successful implementation, the resistance to these potential changes will need to be overcome with the use of various solutions. Through this paper, these disruptions, changes, and solutions are emphasized.