VTI natat
TF 57-16 1992
Titel: Report from Head Up Display (HUD) Workshop
Paris May 27-28 1991
Författare: Lena Nilsson
Avdelning: TF
Projektnummer: 57333-7
Projektnamn: PROMETHEUS bevakning (Europa och Sverige)
Uppdragsgivare: Saab, Volvo
Distribution: Fri
db
Vä -øcb
Pai/(-'Insgitutet
REPORI FROM
HEAD UP DISPLAI (HUD) WORKSHOP PARIS MAX 27-28, 1991
Prepared by Lena Nilsson, VTI August 1991
CONTENTS PRE-WORKSHOP PREPARATION
INTRODUCTION
THE USE OF HUD IN CARS BASIC RESEARCH ON HUD
TECHNICAL ORIENTED SPECIFICATIONS . . . .. CRITICAL REMARKS
SCENARIOS
ELECTRONIC & SUPPLIERS HUD PRESENTATIONS HUD APPLICATIONS IN CEDS
WORKING SESSIONS CONCLUSIONS ACKNOWLEDGMENT LIST OF APPENDICES 1 WG4 Meeting Participants Workshop Participants Workshop agenda Hallén Bubb Labiale Varalda Schrievers
Documentation from presentation by from presentation by
Documentation from presentation by
Documentation from presentation by
Documentation 2 3 4 5 Documentation 6 7 8 from presentation by 9 0 0 0 6 3 2 1 3 ?
Documentation from presentation by Svidén
10 Documentation from presentation by Jaeger
11 Documentation from presentation by X-ial
O O O O O O O O O O O O O O O O I O O O O O O O O O O O O O O O O.
PREiiORKSHOP PREBARAIION
PROMETHEUS Working Group 4 had a short meeting before the start
of the workshop. The contributions to the workshop from WG4
members were presented, discussed, and commented on within the
group. The-participating members are listed in Appendix 1..AV
rather animated discussion about the definition of a contact
analogue HUD took place. The discussed question was: Does
contact analogue mean a perfect overlay picture of the real
world, or does it mean any information presented to the driver
through the windscreen? No general answer (strict definition)
resulted. It was decided to focus on the choice and
specifi-cation of car applispecifi-cations that would be suitable and beneficial
for HUD use, and to leave the terminological discussion.
INTRODUCTION
The workshop was an activity within the European PROMETHEUS
program. It was a follow up of the technical HUD meeting in
Paris 1988. The purpose was to discuss for which types of driver support system, HUD presentation would be a benefit, and when it should be avoided (input from basic research and car companies).
Another purpose was to establish draft specifications for HUDs
due to environmental conditions, driver task requirements etc.
Also, the representatives from the electronic and suppliers
industry should have the opportunity .to report the state of
technical development today, and what to expect for the 1, 5,
and 10 years to come.
The welcome speech was spoken by Christine Mescam from PSA, who
hosted the workshop. She invited the participants '(listed in
Appendix 2) to fruitful discussions about how to use HUDs, to
improve the driver's situation in order to improve traffic
safety. Stig Franzén, Saab, acted as chairman during the
work-shop. He presented the agenda (Appendix 3), which was approved.
The disposition of this report, which mainly consists of
summa-ries of the presentations and working sessions, will be related
THB USB OF HUD IN CARS
S. Franzén (Saab): The presentation was an introduction to, and
an overview of HUD use, partly based on experience from the aircraft application. Important differences between the car and
aircraft applications were pointed out, especially concerning
user aspects (see table below).
Drivers Pilots
Age
(16) 18 -
ca 20 - 40
Selection None Best fitted
Training Once Repeated
BBSIC RBSEARCH ON HUD
A. Hallén (VOlvo): Ideas for HUD application specifications were
presented. Possible applications were suggested to be vision
enhancement, interactive route guidance (IRG), safe driving
information (including warnings), information from the
infra-structure, and vehicle status information. The presentation
focused on MMI design questions of HUD images. The viewing angle, image distance, and image colour (monochromatic or
multi-colour -HUD) aspects were stressed. A division of the windscreen
(field of vision) into 6 zones was proposed, for the positioning of HUD images in accordance with their priority/urgency. The ranges for high priority information were suggested to be 12°
horizontally, and -1.5 to -8° vertically. A HUD specification
matrix was presented, and intended to be a help, when specifying
the requirements of the discussed image features, for the diffe-rent applications. It was decided to use the matrix in the working sessions, to try to establish draft specifications.
/Comment: The extension to the right of zones 5 and 6 seems too
large. The information may just as well be displayed head-down/.
The documentation from the presentation can be find in Appendix
H. Bubb (Universität Eichstätt): The question What information
should be presented on a car HUD?" was discussed. The main
advantages of HUD use in cars were said to be, that the driver can keep his/her eyes on the road while perceiving presented information, and that the accommodation problem caused by diffe-rent information distances is eliminated. It was also stated
that there are problems connected with the use of HUDs in cars. The main ones are the small space available, technical diffi-culties to use the windscreen as a combiner, and the high costs.
Because of these problems a danger exists, i.e. low cost
solu-tions with reduced optical Characteristics, and short image
distances may appear.
Some HUD projects at car companies were surveyed. The chosen technical solutions, and the resulting image distances (2.5 m) seem to be very similar. Digital speed presentation was the most common application dealt with in these projects. /Comment: Does this mean that the development is concentrated on continuous presentation of changing digital figures? If this is the case,
it must be commented that the benefit of such a speed
presenta-tion is still under debate./ The aircraft situapresenta-tion was dis-cussed in terms of different aspects of the information given,
i.e. information content, digital versus contact analogue
pre-sentation, and integration of information from different
sources. Pros and cons of HUD use in aircrafts were listed. It
was suggested that the experience and knowledge, gained from the
use of aircraft HUDs, should be used to estimate the
applicabi-1ity of HUDs for cars.
'
The Rasmussen model of human information processing was
described, and related to the driving task in terms of the three
hierarchial levels navigation, guidance, and stabilization.
Human limitations and deficiencies associated with eachof the
three levels were discussed, together with proposals for
ergo-nomic solutions. The importance of the time factor was stressed.
For the sake of safety, it is crucial that the time needed for
necessary information processing corresponds to the time avail-able in a given traffic situation. It was concluded that systems intended to support the driver shall simplify decisions, allow
Derivated from these conclusions, some indications how to use HUDs to reach these goals were given.
For the navigation task, only a simple arrow is needed. The position where the driver has to turn' is marked by an arrow
displayed on the road. When the vehicle approaches, the arrow
remains in a fixed position at the choice point where to turn. For the optimization of safety in the interaction (with other
road users) tagg, the brake, safe, or overtaking distance can be
indicated by a horizontal bar displayed on the road. The bar "moves" in front of the car according to given conditions, in order to give the driver an idea about necessary distances to
come to a fullstop, to keep a safe distance, or to pass another
vehicle. When the direction indicator is activated, the brake
distance bar, displayed in the own lane, "moves" to the oncoming
lane and indicates safe overtaking distance. The displayed brake distance is calculated from actual speed and the friction
coefficient. The latter has to be set manually, and can be
switched between 1.7 (dry road), 1.4 (wet road), and 1.2 (icy
road). To calculate the safe distances the actual speed, and a
driver reaction time of 1.2 seconds are used. /Commentz Is it
reasonable to display more than one 'distance type" at the sametime? In case, how shall the different types of information
interact? More 'dynamic' numerical values of the involved variables are probably required, to reach a system that
func-tions in a way that is well accepted./Speed was not suggested
for HUD presentation. A couple of technical possibilities to create the proposed HUD images were presented, including
binocu-lar as well as monocular contact analogue solutions. Both
con-cepts have been realized and installed in cars. A video,
recor-ded from the driver's seat was presented, showing how the
pre-sentation of bars functions in "reality". In a field study using
the binocular HUD, subjects kept more distance in a queue,
waited for longer distances before overtaking, drove more slowly
at 'give way' intersections, and increased the total time of
safe driving, when the HUD was available.
Thus to summarize, HUDs in cars are only worthwhile if a very
big safety effect can be achieved, HUD images shall be displayed on the surface of the road, the position of HUD image (image
distance) shall be possible to vary, the graphics of HUD
infor-mation shall be as simple as possible. The documentation from
the presentation can be find in Appendix 5.
G. Labiale (Inrets-Bron): This presentation pointed out the
important 'cooperation' between technology, human factors, and_
driver behaviour and acceptance, for a successful development of
HUDs for car applications. Technology sets the absolute limit for what is possible and not possible to "display". But when it
comes to the establishment of design specifications, it is
necessary to consider knowledge from behavioural sciences. This
knowledge should cover traffic goals, driver needs, safety
related behavioural effects,' ergonomical principles etc., and include modifications due to different driver capabilities and varying environmental conditions. If the required knowledge is
lacking, research has to be initiated. For a support system
(HUD) intended to help the driver in a specific task, the
"display" Characteristics for which specifications are required are image position, image features (like size, lmminance,
con-trast, and colour), and timing. The driver Characteristics of
importance are visual capability, attentional and perceptual capability, usage strategies, attitudes and acceptance. Also the
ranges of the capabilities, due to age, handicap, driving style
etc., must be considered, as must driving conditions (like
visi-bility, traffic density, road geometry etc.). The documentation_
from the presentation can be found in Appendix 6. IBCHNICBL ORIENTED SPECIFICAIIONS'
G.n Varalda (Fiat): The scope was to define relevant physical
features of a car HUD (and their values), which are necessary to
meet MMI needs, and to satisfy safety, comfort and acceptance
requirements. The following general requirements _were given:
contrast (min 1.2), brightness (adjustable), horizontal
diver-gence (max 2mR), vertical diverdiver-gence (max ilmR), distortion (max
10%), field curvature (max 0.25d), and sharpness (max 0.4mR).
The importance of the features field of view, image registrar
resolu-tion, distortion, colour, and repetition rate was estimated for
the applications warnings, traffic safety information,
naviga-tion (IRG), and vision enhancement by use of a three pointed
scale (from + to +++). For vision enhancement all the features,
except colour, were given +++ (highest importance), while most
features were judged.medium important (++) for IRG. Colour was
estimated to be the most important feature (+++) for safety
information, and also important (++) for warnings together with
image distance (++).
A HUD prototype for route guidance developed at Fiat was discussed as an example. IRG information is highly correlated to the traffic environment, and to the driving task. The
informa-tion needs to be presented only at certain occasions, and the
images (symbols) have to be simple. Symbols for straight on at
traffic lights", '45° right turn (including the distance to the
turn showed as a decreasing bar), and 'lane to be chosen' were
shown. Technical data and describing figures can be found in the
documentation (Appendix 7). At the end of the presentation,
areas where further technical research .and developments are
needed were defined. These were: combiner improvement, image
quality, high brightness displays, and automatic brightness
control. /Commentsz The timing of IRG information is crucial.
This was not discussed in connection with the prototype
solu-tion. The prototype symbols seem. well designed, and easy to
interpret. Maybe it should be even easierto interpret the three dots as a traffic light, if they were surrounded by a frame. The
green colour was difficult to see on some backgrounds and for
some visibility conditions (from an earlier video
presenta-tion)./
CRITICAL REMBRKS
G. Schrievers (BMW): Marketing aspects, design aspects, and
safety aspects were identified as reasons for introducing HUDs
in cars. The HUD information was classified as warnings, safe
distance information, vision enhancement, and navigation infor-mation. Two proposals for safe distance presentation are shown in the documentation (Appendix 8). One where the driver has to
keep his/her car within two vertical bars, and another where no
other vehicle shall appear between the own car and a horizontal
bar, marks,
in order to remain at a safe distance. Some important
re-regarding the different applications, are extracted from the very comprehensive presentation.
Application
Car status warnings
Traffic sign warnings
Safe distance info
Remark
1) Digital data not desired, but
changes beyond a limit shall be shown.
2) Wide symbol spectrum.required.
3) Purpose to focus drivers' attention.
Alt: Acoustical signal!
1) Wide symbol spectrum required.
2) Colour and shape ._crucial for
recognition. Compatibility to real
signs.
3) Infrastructure based.
4) New, advanced sensors required.
5) "Intelligence" required for timing,
priorisation, and decisions about
parallel/sequential,
occasional/perma-nent presentation.
1) The HUD image must be a function of a
lot of factors (speeds, friction etc.)
which have to be measured and weighed together.
2) Continuously changing image required
(because other involved factors vary).
3) Contact analogue solutionrequired.
Required complexity?
4) Fixed or variable image position?
5) Very high system reliability and
liability required.
6) A new driving (tracking) task will be added.
7) The indication of a safe distance
example behind curves) cars or obstacles
have to be considered.
8) Adjustability to driver, vehicle, and environment conditions.
Vision enhancement 1) New sensor technologies required (IR,
(radar, lidar etc.).
2) Contact analogue presentation, based
on real camera images, or artificial
images (preprocessed camera images)
required.
3) Interpretation problems when only
parts of the environment is highlighted by a sensor technique.
4) Guaranty for recognition of
artifi-cial representation of objects required.
5) Mismatching of HUD image and real
world".
Navigation 1) The HUD image must be a function of a
lot of factors (speeds, distances, road
properties etc.) which have to be
measured and 'weighed" together.
2) Symbol variability (different inter-section layouts) required.
3) Adjustability to driver, vehicle, and environment conditions.
When introducing HUDs in cars, the drivers' information
proces-sing will also be influenced. The warning effect and attention to.environmental information will be reduced due to focusing, if HUD information appears permanently. If it only appears in
case' (when necesSary or asked for), the warning effect will be
high and the attention to the environment may be characterized
as "normal". When the ability to interpret the HUD information
is considered it is the other way around, i.e. this ability is increased when the presentation is permanent and reduced due to rarity, when the presentation is occasional. Also effects
types of HUD. Examples are accommodation problems when HUDs and
HDD are used parallelly, legibility problems due to reduced
'information/background" contrast, and variable background con-trasts. Fixed and variable image distances probably lead to dif-ferent effects. /Comment: Driving in the dark does not require
dark accommodation, provided that the headlights are on./ The
documentation from the presentation can be found in Appendix 8.
SCENBRIOS
O. Svidén (Drive Secfo): Two videosdescribing hypothetical
future scenarios and support systems were shown. The first video
described some possible future trips, made by private drivers as
well as professional drivers. The video was actually a
presen-tation of 'Test Site West Sweden". The presented HUD information
consisted of simple symbols (see Appendix 9), which were said to be self-explanatory. The other video showed a simulated trip to SNRA in Borlänge. The HUD information contained simple symbols
and text. /Commentz It was striking to experience how much
attention that is drawn to permanently presented HUD
informa-tion. After the video, it was difficult to describe the
environ-ment that had been passed. This is in accordance with the
'fears expressed in the previous presentation (Schrievers).
Besides, the symbols seem not to be completely self-explanatory.
You have to learn that the 'short and thin' arrow (Appendix 9)
means keep left/right, or prepare to turn left/right, while the
'long and thick' arrow means turn left/right. 'Also, colour
blinded drivers must learn that both size and colour varies forthe speed control indicator. The proposal to have a symbol
showing that the system is on and in function is good./
ELECTRONIC 8 SUPPLIERS HUD PRESENTATIONS
Bosch (W. König): The company has focused on simpler HUDs, and
have been working on reduction of size, volume, weight_ and
costs. Cheap fresnel lenses have shown to be possible to use.
Bosch's 'main interest seems to be a HUD for speed indication.
10
2.1 meters. The illumination level is still a problem. Bosch
seems not to be working on advanced contact analogue devices.
They do not believe that such HUDs will be available as usable
and reliable solutions untilin the far future.
Jaeger (C. Jury, P. Rousseliere): Jaeger judged warnings to be
the main application for HUDs in cars. The reason for the
war-ning is suggested to be "read" from the conventional dashboard.
/Comment: Does not this make the HUD an expensive alternative to a tone?/ When driving on highways, drivers look far away most of the time. Under such circumstances Jaeger estimates that it would be beneficial to present speed and gas level at a fardis-tance. It should be possible to switch the speed and gas level
presentations from HUD to HDD. /Comment: Why?/ Also, to assist the driver in the navigation task, and during bad visibility
conditions (simple arrows and camera picture, respectively) HUD
solutions may be helpful. Vision enhancement requires that the
image covers a field of view of approximately 10°. Currently Jaeger does not know about any solution for this.
The location, size, colour, luminance and contrast of the HUD
image must be specified. Jaeger's suggestions are listed below:
Feature Specification
Image location Lowest and highest parts of the windscreen.
Image size Vertically, a few degrees.
Horizontally, limited by the optical system.
Image colour Further research required.
Dependent on available light sources with
enough (high) luminance.
Image luminance 1000 cd/m3.
Image contrast Min 1%.
Jaeger is currently working on HUD solutions for two different applications, warning and safe distance information. The warning is a telltale saying 'STOP'. The safe distance information
11
dependent. The car in front has to be within the bars, for a
safe distance to be kept. The Characteristics for the two HUDs
are as follows:
Feature Warning Safe Distance
Image distance lu45 m. 2.40 m
Field of view 1 x 6 (°) 1 x 6 (°)
Image size ' 25 x 150 (mm) 40 x 240 (mm)
Colour red green
The documentation from the presentation, including technical
data, can be found in Appendix 10.
Pilkington (R. Merryweather): Pilkington gave a short
contribu-tion. It was mainly in agreement with the presentations from the
other E & S representatives, considering the technical possibi-lities and limdtations. Pilkington also asked for more precise descriptions of the tasks and situations where HUDs can be
bene-ficial solutions, in order to transfer them to technical
requirements.
VDO (W. Blume): HUDs ought to be beneficial for elderly (>40
years?) people, because they can often read more easily from a
far distance. A study from.the 1970's was referred to, where it
was shown that the legal speed limit was obeyed better when it
was presented on a HUD ('moving scale') compared to when it was
presented conventionally. Differences in some behavioural
aspects between drivers and pilots were pointed out. See below:
Behaviour Drivers 'Pilots
Eye fixation range 2 -00 (m) 200 - 09 (m)
Field of view 180° 30°
12
Very illustrative pictures showing how HUDs can hide important objects/features in the environment were shown.
VDO has developed a prototype HUD. It has been installed in a
VW. The image distance is 2 meters. According to VDO the most
beneficial application for HUDs is route guidance. Only simple arrows are available today.
A behavioural study (by Prof. Schnyder) of effects on head
movements from different speed presentations was reported. Driver behaviour when speed was presented digitally on a HUD was
compared to the corresponding behaviour when speed was presented
on a conventional speedometer. It was concluded that the HUD
presentation resulted in less head movements. /Comment: The
result seems to be given by the design (see figure below, where
* means lack of data)./
Position
HUD HDD
analogue *' data
Info
digital data *
X-ial (C. Liegeois): HUDs can be beneficial to improve safety
because the driver can perceive information at the same time as s/he performs the tracking and traffic supervision tasks. HUDs can also support the driver when the visibility is poor (vision.
enhancement, computer and sensor .assisted driving). Another
application for HUDs is traffic management. X-ial HUDs have been
used in tests in the rail-roads, to present actual and target
speeds. Right, left and straight ahead arrows of LCD segments
have been presented. As you come closer, more segments are on.
The image distance was 2.5 metres and the image luminance 150 000 cd/m?. /Commentz !/ X-ial is now working on the installation
of a HUD in a car (Citroên), and the development of a two-colour
13
found in Appendix 11.
HUD APPLICAIIONS IN CEDS
F. Hartemann (Renault): Mr. Hartemann is working on the route
guidance task in CED 9 (Dual Mode Route Guidance). The
presen-tation stated that if we want to present visual messages to the
driver while s/he is searching the right way, and if these
messages shall be of any help, the timing is very important. If
the timing is not considered, dangerous lane changes and
over-takings may result and decrease safety. Results from experiments on the route guidance task were reported. Visual route guidance
information, at choice points of different complexity (see
figures below), has been presented to drivers on HDD. Workload
(in terms of average number of glances to the dashboard), total
time looking at the road, and total time looking at the display were detected. The obtained data are given in the table below.
Mål??
Workload 1.00 1.50 2.50 2.80 (glances)
Road looking 0.81 1.04 1.98 2.29 (seconds)
Display looking 0.45 0.58 1.17 1.30 (seconds)
HORKING SESSIONS
The intention with the working sessions was to try to answer the
questions listed below, for some potential applications. It was
suggested to use the specification matrix (Hallén) to structure
14
1. For what driver support systems, and related driver tasks,
is the introduction of a HUD a benefit? When shall a HUD be
avoided? .
2. What specifications must be established to meet different
driver task requirements, environmental conditions, etc. (based on answers to question 1)?
3. What technologies will be available, now or within 1, 5,
10 years from now, to meet the specifications (question 2)? Will
it be laboratory, prototype, or near-serial production versions? The time for the work was experienced to be too short. Besides,
the degree of complexity was rather different for the considered applications. This resulted in great variation in the level of
concreteness of the outcomes from the different groups. The
group reports are summarized below.
Group I (Warnings): HUDs can be beneficial to monitor vehicle
status (vehicle safety conditions), to monitor weather
condi-tions, to monitor traffic conditions, and to monitor driver
conditions. Driver conditions were not discussed, because if the
driver does not feel or know about his/her bad condition,
infor-mation on a HUD will not help. Vehicle status monitoring is the
only application for which sensors for raw data measurement are
available today. HUDs for the warning application are already
available, or will be available very soon, in the form of simple
symbols. The HUDs must be adapted to each specific car model.
Red is the colour conventionally used for serious warnings; To
create the red colour on a HUD may be a problem.
Group II (Safe distance): To present information, intended to
help the driver to keep a safe distance to the car in front, on
a HUD would be beneficial. Such information (image) depends on a
lot of factors, and also varies (maybe very rapidly) in time.
Thus, it seems as variable focus HUDs are needed for the safe
distance application. Such systems will not be available in a reasonable future. However, X-ial is working on a solution. So far they can theoretically 'manipulate the optics so the image "moves". Bosch has no experience of contact analogue HUDs in any
15 form.
Group III (Vision enhancementl: First of all it was stated that
more research is needed. Then, HUb was assumed to be a
benefi-cial solution for vision enhancement provided that it does not give a false distance impression, is not in conflict with
adap-tation, and enhance the existing view. The required sensors can
be 2d or 3d sensors. They can either generate "true images"
(camera pictures) of the environment, or extract features in the
environment. The images are presented to the driver, who has to decide their danger/relevance.
The vision enhancement application implies that all driver
tasks are involved and can/must be supported. The driving
sub-tasks, which under poor visibility conditions, would be most
likely to be supported by the use of HUDs were identified. They
are: road tracking, safe distance keeping, obstacle detection,
overtaking, road sign identification, lane identification, and
feature identification. Also speed awareness and speed control
are important, but maybe there are other better solutions to
support these subtasks. The group estimated the most suitable
windscreen zones, fields of vision (Hallén), for presentation of
the different informations, to be as shown in the table below.
The zone numbers indicate the best choice, but numbers within
brackets may also be possible.
Subtask genes
Road tracking 1 and 2, (3 and 5)
.Safe distance 1 and 2
Obstacle detection 1 and 2
Overtaking 1, 2, 3 and 4
Sign identification 1, 3 and 5
Lane identification 1, 2, 4 and 6
Feature enhancement 3, 4, 5 and 6
16
The HUD images ought to be shown at the "real" distance, but
beyond 2.5-3.0 meters. For all subtasks, except* road sign
identification, the image can ,be_monochrome. Monochrome does,
however, not mean that any colour can be used. It has to be
specified from adaptation point of view (human eye sensitivity).
Road signs have to be shown as they look in reality, i.e.
usual-ly in multicolour. The importance of some of the system.features
discussed before (Varalda) was estimated for the subtasks. The
result is shown in the table below.
Subtask ;mage Contrast Resolution Repetition
registr. ragg Road tracking ++ + ++ Safe distance ++ + ++ Obstacle detect. ++ + ++ Overtaking I ++ + ++ ++ Sign identificat. + ++ ++ + Lane identificat. ++ + + ++ Feature enhancem. + ++ ++ + [Speed 0 + 0 ++
No electronic supplier is really working on such a sophisticated
HUD solution that is required for the vision enhancement application.
GONCLUSIONS
Considering what has been reported here, it is obvious that many comprehensive presentations were made during the workshop. A lot
of important data, ideas, and proposals were shown. Inspite of
this, it did seem as if the technical development of HUDs had
not reached the level expected by the basic researchers and car
company representatives. Neither had the car companies' and
basic researchers' specifications of HUD requirements reached
17
design. We do not even seem to know what information to present
on a HUD. The reasonable question to ask is then: '§21 did this situation occur?'. One answer can be that the cooperation between the involved interested' parties has not been close
enough. Instead, they have all been working very hard within
their specific areas, but not adequately consideredthe total
problem to solve, which is to decide the applicability of HUDs
for car use, and in case to come up with optimal designs foreach specific application. The result has been that too little
knowledge has been transferred between basic researchers, car
companies, and electronic and suppliers industries. To reach the ultimate goal, safer and.more comfortable driving with the help
of HUDs, a stronger push from the PROMETHEUS organization is
probably needed. One way can be through carefully composed
groups working closely together, and dealing with all aspects in
order to solve the problem.
ACKNOHLEDGHENT
The participation in and the reporting from the workshop were financially supportedby Saab and Volvo.
APPENDIX 1 HG4.Meeting Participants S. Franzén A. Hallén C. Mescam F. Hartemann G. Varalda G. Schrievers M. F C M. R L Richardson . Kuhn . Jung . Martinsson . Haller . Nilsson Saab Volvo PSA Renault Fiat BMW Jaguar DB MAN Saab FhG-IITB VTI
HU D W o r k s h öp P a r t i c i p a n t s
M
i
m
:
m
e
n
Al
m-15
m
a
n
. M ' u /J [( 07 14 ) '2 -7 o n 4 62 .. ., o/ J (1 -V A RA L O A W A T RU ). Ch . ;((C LL L' S ?6 h a He rceo lc s ' Ba d ÅC s / . ÅH E E K S M E N K m WM A: er RE M/ JU LI ' Sør çuvr câ " 6 a ' I cl 6 a CI O. Öwi øyl / (A HL , to mt /J ouc én uå ' v ' , .jmut 'øm mN 'i vv-m, O ve S vn c l øn D 1 2 |U E -§E C F 0 L w/ L ,V i/ 59 29 44 . V T I M i d ? c h J un âe , V o l / ( s a l e áze wMA
TS
-M
AF
HI
US
ÅW
J
(M
A/
b
:5
%1
7/
//Öt
'he
r'
ka
üái
w'
v.
El
id
a!
?
(Åh -; 47 04 j M N G Ã/ bQ /L / fr z" (c á. *" */ 1 [l a/ .M /C I' /j 'o tiBm
w,
W
e
m
w
VD
O
.
%
\
\
T
K
.
"
M
4%
u
sc
ec
ao
wp
ow
Ma
mm
an
s
çr aH ç°|O S H êf \ 7 _ wt a n n \ { E K ? c a m H m n wn r un ' . ?H z k ,N ?. .. 45 9 TF 'Q OS I, /f /O RS / 5, 4/ V1 : 6; l ;7 67 m 6 /L/ PW ÅÃW L KOUS SE UE RI: WM I/ FR *m aa -L i L E G E Q G (L HÅJ WH Y J IQL-Jc
måuc
w
85
2m
m
n
H
g
s
a
n
r
á
C
M
;
"
P
S
A
a
nwa
'5
U
M
_
»
W
záw
mm
swt
S
W
-86
4%
*
. ' 1 __ 1 (aug
LÃB
I'
HL
E
IN
RE
T$
<B
MV
V
M
o
n
*
Ma
vi
c
10
0/
74
0
'a
46
*
M i KE p |§H A R OS o d : A c rug g C a ns65
m.
.
Ro
se
Ha
m/
ir
S c h MV C. ) R 'm 7 (A ) H G \APPENDIX 3 1 (2)
AGENDA
HUD WORKSHOP MAY, MONDAY 27TH
10H30 - 11HOO
|ntroduction "The Use of HUD incar"
11HOO - 11H20
Basic Research on HUD I
11H20 - 11H4O
Basic Research on HUD H
11H4O - 12HOO
Technical Oriented Specifications
12HOO - 12H30
Critical Remarks
12H30 - 14HOO
LUNCH
14H_00 - 16H30
E&S HUD Presentations
16H30 - 17H30
Demonstration and coffee break
2 (2)
AG EN DA
HUD WORKSHOP MAY, TUESDAY 28TH
9H30-9H50
9H50-11H30
11H30 -12H3O
12H30 - 14HOO
14HOO - iSHOO
15HOO - 15H30
15H30 - 16HOO
HUD' applications in CEDs
Working session
Group results
Lunch
Technical Potentiel
Automotive Industry Functionnal Specifications
Conclusion of the Workshop
APPEBDIX 4
17113)
Head Up Displays,
basic application
specifications.
(Proposal)
Material for discussion at the PROM ETHEUS HU D work-shop in Paris 91052128 prepared by Anders HallénAPPENDIX 4 2 ('13)
Possible HUD agplications:
-Vision enhancement (contact analogue)
-Vision enhancement (video image)
-Safe driving information
-Warnings
-Infra structure based info (i.e. CAROSI)
-Navigation /Route guidance
APPENDIX 4 3 (13).
Is any
vehicle generated
information displayed _
through a glazed
surface a
HUD?
140
!)
wa
s
CO
Hb
lH
EE
.
Tvn
ic
al
H
U
D
an
nl
ic
at
io
n
in
ai
rc
ra
ft
_
APPENDIX 4
.
us
b
:_
:a
rm
uza
am
AS
D
D
:
22
78
._
_ZøN
c-:
s
il
35
5
áJi
ga
mA
L_
01
5m
LI
NE
-i,
s°
'
-e
f
Zac
-te
s
Z,
4
:Eéx_
Pr
op
os
ed
vi
ewi
ng
an
gl
es
fo
r
H
U
D
vi
si
on
zo
ne
s,
si
de
vi
ew.
APPENDIX 4 7 (13)Pr
op
os
ed
vi
ewi
ng
an
g
p|a
n
|e
s
fo
r
H
U
D
vi
si
on
zo
ne
s,
vi
ew.
APPENDIX 1+ 8 (13)Di
vi
si
on
of
fo
rwa
rd
fi
el
d
of
vi
si
on
in
to
zo
ne
s
to
po
si
ti
on
di
ff
er
en
t
typ
es
of
H
U
D
im
ag
es
ac
co
rd
in
g
to
pr
io
ri
ty/
ur
ge
nc
y
(p
ro
po
sa
l)
.
!
I
i
2.
49
ZO
NE
)
5
//
///
///
//
/
:
o
/
--2
,3
3°
_
_
/
\
,.
APPENDIX .4 9 (13)APPENDIX 4
10 (13)
IS
image
distance
for HUD's
of importance?
(Eye accomodation accounts for a considerable
amount of the time required to read displayed
I
.
.
.
M
4
EY
TE
ND
ED
m
a
o
m
áb
t
s
wc
e
:
'E
ED
UC
ED
A
C
C
O
HO
DÅT
CO
N
T
I
H
E
'C
o
NU
GH
TI
OH
AL
!
1
m
a
m
m
a
'M
ST
AH
CE
1
,ADi
ff
er
en
t
H
U
D
im
ag
e
vi
ewi
ng
di
st
an
ce
s.
26
.å
><
11 :(13)
APPENDIX 4
12 (13)
What image colour(s) is _
required for different types of
HUD applications?
- Monochrome, any colour?
- Monochrome, Specific colour?
- Multi-colour?
(HUD image colour is currently limited by availability
of sufficiently bright image sources.)
-V
is
io
n
en
ha
nc
em
en
t
(c
on
ta
ct
an
al
og
ue
)
-V
is
io
n
en
ha
nc
em
en
t
(vi
de
o
im
ag
e)
-S
af
e
dr
ivi
ng
in
fo
rm
at
io
n
-W
ar
ni
ng
s
-I
nf
ra
st
ruc
tur
e
ba
se
d
in
fo
(i
.e
.C
AR
OS
I)
-N
avi
ga
ti
on
/R
out
e
gui
da
nc
e
-V
eh
ic
le
st
at
us
in
fo
(s
pe
ed
et
c.
)
H
U
D
sp
ec
if
ic
at
io
n
ch
ar
t
fo
r
di
ff
er
en
t
typ
es
of
ap
pl
ic
at
io
ns
.
APPENDIX 4 13 (13)APPEhDIX 5
1 (25)
What information should be presented
in a car-HUD?
Ergonomic considerations and technical consequences. by H. BUBB*
Prometheus-Symposium
Paris, 27. May 1991
*) Address of the author. Prof. Dr. Heiner Bubb
Professux für Arbeitmássenschaft Katholische Universität Eichstâtt PfahlstrgBe 25
W-8076 Eichstått
phone: 08421 20407 FAX: 08421 20474
-2-What information should be presented in a car-HUD?
Ergonomic considerations and technical consequences.
1. What car-HUD-technique is today discussed?
All developments come originally from the aircraft-HUD. The principle of this aircraft-HUD is the following (see frg. 1): an optical equipment, consisting of a converging lens or lens-system and a self-radiant display, is laiing under a semiperineable glass-screen, the so called combiner. The pilot sees the mirror image of the lens in this combiner, whereby this mirror image is superimposed to the natural sight of the scenery. Through this mirror image of the . lens he looks to the virtuell image of the display -here called "object" - and, as this objekt is
near the focus of the lens, its virtuell image seams to lay in a far distance ahead of about 300 - 800 m. Using this picture the so called portehole-effect may be explained: the virtuell image of the display may only be seen, when it lays inside of the frame of the lense-image.
The problem to transduce this principle to motor-cars consists above all in the small space
which is 'available in a conventional car. An other problem araises from the demand to use the
windscreen as combiner. As this has a curved surface with different bending radii in the vertical and horizontal plane, by aspheric rnirrors one tries to correct this influence. By additional rnirrors the light beams are folded in order to minimize the demand of space. A further problem are the costs which can be spended to the HUD in a car. In order to minimize them, so called low cost HUD's are concepted with reduced claim to the Optical precision. Therefore in the most cases the virtuell image is displayed in a' distance of only 2.5 - 3 m near by the front of the hood.
r
a '772 " 3 03'
.-3-Virtuell image in a distance t Amirror image otthe lens inthe combiner
of 300 - 800 rn /
l/// 1///// °
* combiner
in;
Object near the focus F
*/
F
Fig. 1: Principle of aircraft-HUD
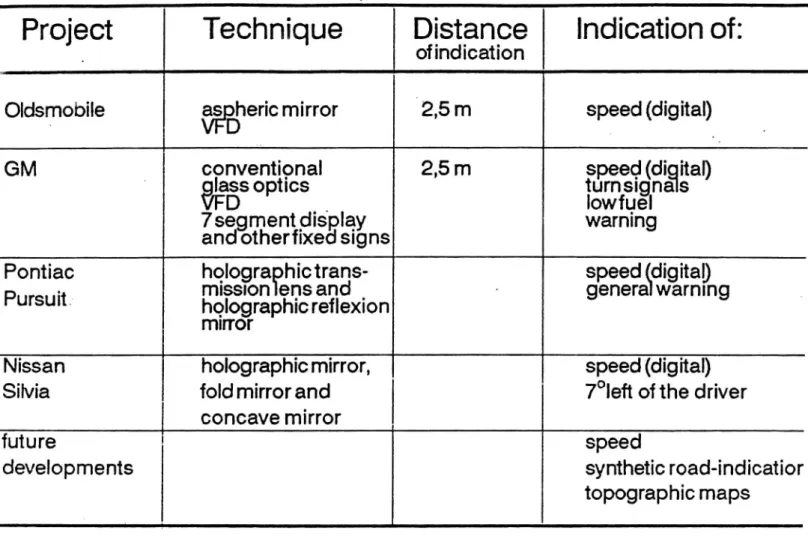
In the matrix of ñg. 2 a survey of different HUD-projects is assorted. Excepted are the developments of Volkwagen and Volvo. The physical technique of deflecting the light beams into driver's eyes is very similar in every case. Also in nearly every case vacuum i'luor'escent
displays (VFD's) are use, as they guarantee the necessary brightness without excessiv
production of heat. In all cases the distance of the virtual image is about 2.5 m. The last column is important for the following deliberations: in all cases as indicated information the speed in a digital form is mentioned. This counts also for the consideration of the future development. Sometimes additionally tum signals, low fuel, and general warning signals are indicated. As future developments are called synthetic road-indication, i.e. the so called artiñcial sight which could technically created by laser distance measurement or infrared optics. Further are called topographic maps as a navigation aid.
-_ . _ . . _ . -. _ . . v. .
Project
Technique
Distance
lndioation of:
_
ofindication
Oldsmobile
_
VF?)
as heric mirror
"2,5 m
e eed di ital
p
( 9 in
GM
conventional
2,5 rn
speed (di ital)
;
glass optlcs
turnsngna 3
D
, -
lowalel
7segment display
warning
and otherflxed Signs
Pontiac
hologra hictrans-
speed gdigital)
P
.tv
mussuon ens and _
genera warning
'SU' '
holographlcrefleXIon
mlrror
Nissan
holographic mirror,
speed (digital)
Silvia
fold mirror and
7°left of the driver
concave mirror
future
speed
developments
synthetic road-indicatior
topographic maps
Fig. 2: Survey of different HUD-projects and the technical datas.
2. What arguments are stated which are speaking for the use of HUD's in cars?
Preliminare only the arguments of such people shall be reported who develope HUD's for cars. All authors arguments: HUD assists drivers in two important ways:
1) The dn'ver can keep his/her eyes on the road ahead while accessing and responding to HUD information
2.) By focusing the HUD image two ore more meters forward of the driver, the need for the eyes to-re-accornodate from the road to the image is eliminated.
-5-This are really important arguments at» the first view, as - for example - the accomodation and the re-accommodation time together last about 1.5 s under daylight condition or nearly 3 5. under dark conditions. People older then 40 years are even little able to accomodate the
point of sharpness nearer than 3 - 4 m. That means, the HUD is also an aid for this people. As HUD's are used now for a long period in aircraft, the corresponding experience should be
considered in order to answer the question where this could applicated to cars. Fig. 3 .shows
the typical aircraft-HUD symbol format: it is a of digital and analogue information.
Information of 'the status of the aircraft itself, as altitude and speed, or also information about the status of the engines, are indicated digtal Information witch could be compared with the
surounding area are indicated analogue. This is for example the attitude or weapon aiming.
This kind of information my be superimposed to the sight of the real world, as shown in Fig. '4. Because of this reason such information is called also contact analogue.
steering demand
_ waypoint
numw heading scale
elevollon angle . 05 o (pilcnlbars ° A' ' ' oircratt L symbol
F5/
angle ol _ OUOCK 0 - \ scale j vertical . ' ' speed . _--ø-'l .-- scale
3"2
mao
kronan: andicaled ,5 __ .. attitudealrspeed L. - horizon bars
Fig 3: Typical aircraft symbol format (navigationmode from
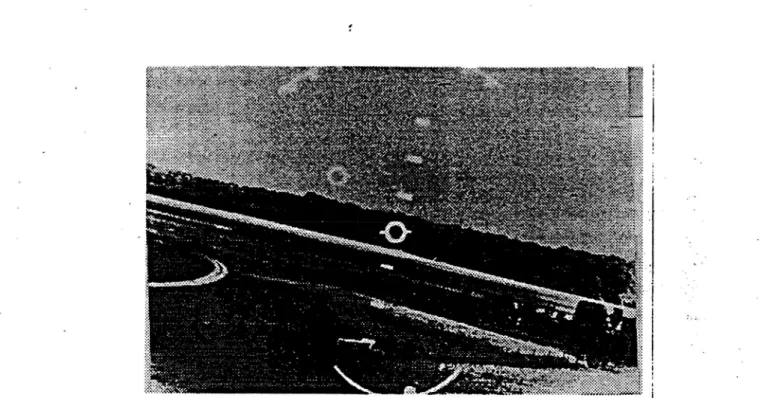
Fig. 4: Superimposed images of HUD and real world in a military aircraft.
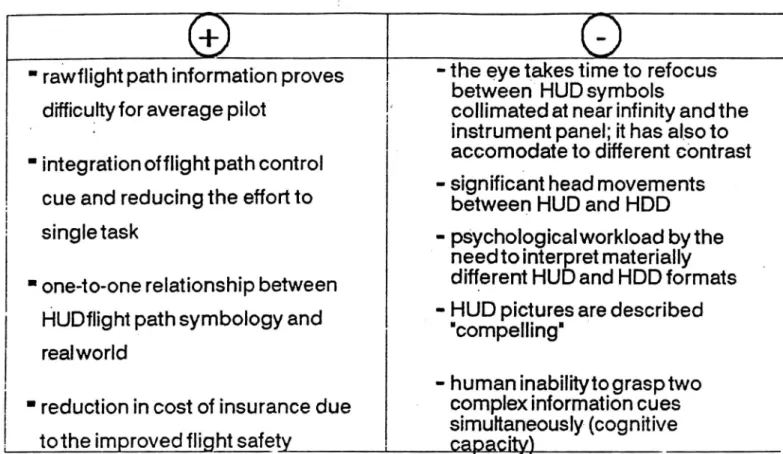
In the literature may be found arguments for and against HUD in aircraft. A survey is shown in ñg. 5. The arguments for the HUD are related above all to the possibility of technically concentrating different raw flight information parts to the indication of a single task. The second important argument is related to possibility of displaying contact analogue information. And a further - very important - argument is the reduction of insurance cost. This is an indicator for the improvement of the flight safety by the HUD (see Short, 1976; Weintraub et al, 1984).
" ravvflight path information proves
difficulty for average pilot
' integration offlight path control
cue and reducing the effort to
single task
" one-to-one relationship between
-the eye takes time to refocus
between' HUD symbols
collimated at near infinity and the
instrument panel; it has also to
accomodate to different c'ontrast
- significant head movements
between HUD and HDD
_- ps'ychologicalworkload by the
need to interpret materially
different HUD and HDD formats
'
-
- HUD pictures are described
HUDflight path symbology and
_compening_ .
real world
- human inabilitytograsptwo
complex information cues
simultaneously- (cognitive
capacity)
' reduction in cost of insurance due
tothe improved flight safety
Fig. 5: Arguments for and against HUD in aircrafts
The arguments against HUD are summarized sayed-(essentially after Dopping-Hepenstal,. 1981): as the pilot doubt some pieces of information in the HUD, he has habitually to chance his glance between the displays in the HUD and in the conventional dashbord. The HUD is described to be compelling: that means the pilot is constrained to gaze only this kind of information. A further important argument against is the human inability to graps two complex information cues simultaneously. This is given for example, when the pilot has .to
observe the digital speed information and the runway in the sanne region of view. All this
arguments have a similar origin: if consequently digital information would by presented in the conventional dashbord and contact analogue information without exception in the HUD, the
most of these arguments would be invalide.
A further fact is the most common question which pilots asked (Short, 1976). It is described there, as it was also a question of the driver of an investigation in car-HUD (Assman 1986):
-8-argument agains all ergonomic efforts. It represents the general human property to maintain the customary and to resist innovations. .
3. 'What human limitations during car driving are to be considered?
In order to -get sufñcient information for the construction of information which should -be
presented to the driver with the aim of road-safety-improvement the principles of human
information 'processing are to be observed, as they are today fonnulated by cognitive psychologists.
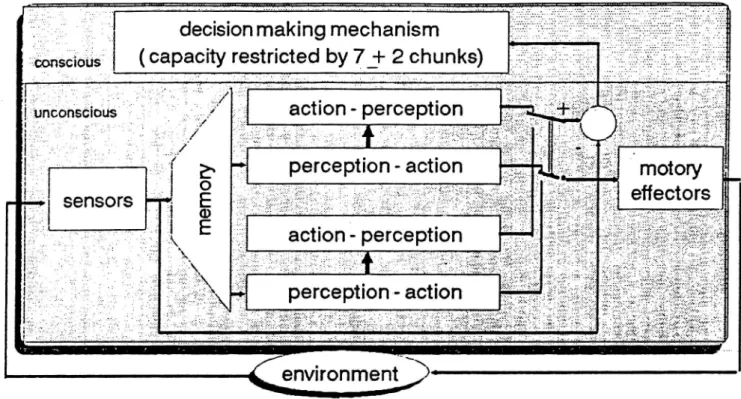
According to their theory, the stirnulus of the environment excites an intemal model of the
environment which consists of two parts (see ñg. 6). One .part gives an expectation of the recognition which will be received when a certain action is accomplished (the action-perception part). The other part contains the action which is to be accomplished when a certain configuration of, stirnuli is recognized (the perception-action part). If the information which is actually recognized is the same as that which is expected, then the corresponding action remains unconscious and may be carried out "automatically".
This information flow may be explained by the example of car driving: when we recieve a bended road ahead, the perception-action model tells us theprogram of activities which we have to .transduce to the motory effectors, that means our muscles. If the information recieved by the sensors corresponds with the expection created by the action-perception part of the internal model, we are able to drive blindfold. If there is a difference in the expected and the recognized information - irnagine a suddently slippery part on the road surface -, this
difference is raised to the level of consciousness and the brain searches for other stored
internal models which promise a better outcome of the corresponding action. This selection process is carried out by the so-called decision making mechanism. Two important re-strictions exist for this decision making mechanism: it needs much more time than it is necessary for highly skilled behaviour and the number of internal models which may be compared to one another is limited - after all our _eXperience - to maximum 7 i' 2.
dby7
decision making mechanism
g (capacity restricte
+ 2 chunks) ;':gggfggggg
SGHSOFS
' I
action - perception
' 4 V -J_._V v . ..'.:2' ...2..'. .i 'a-;. ;.4
perception o action
action- perception
u_ i . '1 _11_ _.' . ._ . 4-1' ' S T ' 1' _.'.; r_ _. Z_..-.-ø -' .- in :1;_2..';. '." _;:;. ...'.-.'.;-." ".- .'V-A._.,. Lpercept
ion v- action
'r ' motory
( envrronment 2*
Fig. 6: Cognitive psychological model of human information processing
The learning process may be described with the aid of this idea. If a certain combination of stimuli occurs more than once and if this combination always suggests the same action, this stimulus/reaction combination will be engrained in long-term memory and stored as a new
internal model.
On the basis of this conception Rasmussen (1988) devided human information processing in three parts:
I Skil] based behaviour means .actions which are carried out absolutly blindfold only controlled by the corresponding internal model.
I RuIe based behaviour needs allready the decision mechanism, as it is necessary to remember or recognize skilled actions under the actual conditions.
I Knonu'ledge based behaviour is related to the actions of the decicion mechanism in a
narrow sense. It means what we call "thinking": identiñing, planning, and problem solving.
_10-These levels of information processing are to be set against the driving task: The driving task
may be understood as an hierarchy of three different levels of subtasks consisting of navigation, guidance and stabilization.
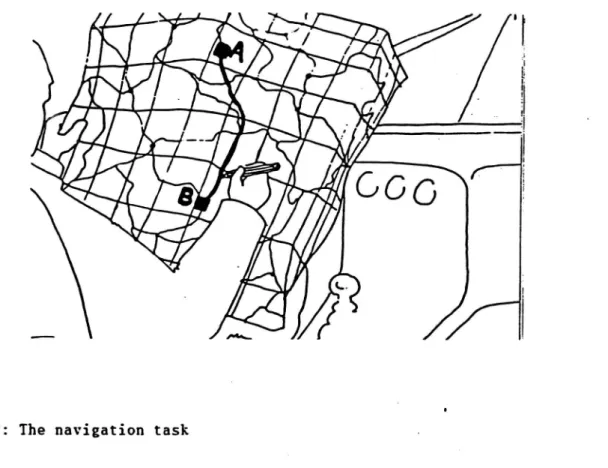
-_- The navigation task deterrnines the best rout from point Ato point B (ñg. 7). The result
of this task is the determination of the route and the desired arrival time. These in tum
serve as imput for the hierarchically lower guidance task. .
Fig. 7: The navigation task
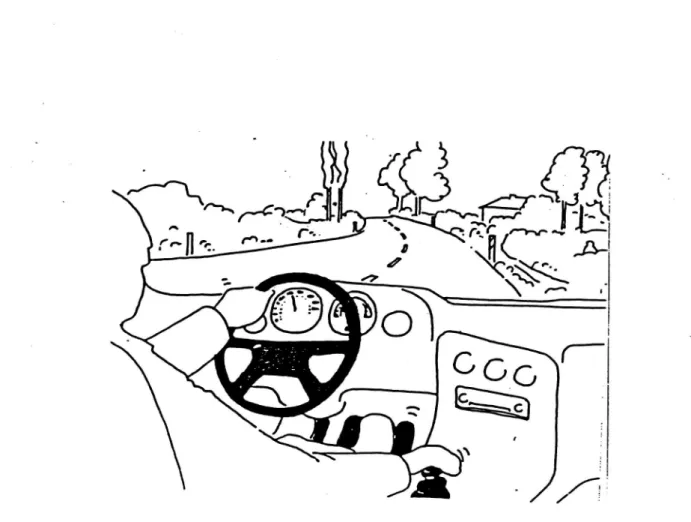
- The guidance task results in the determination of the desired course and the desired speed at each moment (ñg 8). The course and speed are determined in such. a way that no collision with either moving or stationary objects occur and that the boundan'es of
;11-?5=
M
-i l ä l'a
(\
V
'I .' I ' =\^\.1_zfv - 2='<>
»f
l
'%
:I
Fig. 8: The guidance task
- The stabilization task rests on the lowest level of driving task hierachy and consists of maintaining the desired course and the desired speed (ñg. 9). Speciñcally this means that the differencies in the desired and the actual course and speed must be minimized by properly using the controls such as gas pedal, brake, steering wheel, clutch, and shifting lever.
_12_
Fig. 9: The stabilization task
It is typically for such multilevel hierarchical tasks that a failure to complete a task on a lower level of the hierarchy forces a change of task on the next higher level. If the driver notices that the stabilization task can no longer be fulñlled due to a skidding of the automobile, then
on the next higher level of hierarchy - the guidance level - a change must be made in the
desired speed or course. Sirnilary one level higher on the hierarchy, if at .a fork in the road the acmal course is incon'ect, then on the navigation level the driver must select a new roure. On all three levels of the driving task appear certain difficulties due to abilities of the dn'ver (see ñg 10).
_13-General driving task driver - Iimitations ergonomic solution
proposals
' '
.
*
vi.. u o a u- a . u . .o . o n. .. a en -o o o. - - u .- ..-Guidance
-observation oi vehicle dynamics - active control element (ACE)
-peroeptionoi speed -indicationoi speed
- perception ol sideward movement - automatized tracking
Pig .10: Comparision of the different levels of driving task, the human limitations and ergonomic solution proposals.
- On the level of navigation one difñculty is given by the poor properies of the human memory in retaining the sequence of different names of towns, villages, or streets. The
traditional aid in this case is the use of a map. Besides the danger which anses by the
destraction during looking on this map, a further difficulty is given by the bad human sense of direction which makes it impossible for many pe0ple to transfer the
information from the map to the reality.
- On the level ofguidance specific difñculties arise from the eventually restricted ability to percieve other traffic participants or obstacles which are for example masked by fog or other object or by the road itself.
An Other difñculty in this area is the poor ability to percieve and extrapolate the own movement and the movement of other trafñc participants. But this is essentially necessary in order to react in time. Many accidents may be explained by this fact.
;14-The third difñculty is explained by the following thoughts: by selecting the speed of automobile on the level of guidance, the operator can, within limits, determine the frequency of recalculation of the desired course and speed. The freedom of the operator to determine the frequency of recalculation entails a certain danger of exeeding the
bounds of linearity inthe transferfunction of the machine. This means that the required
acceleration in the lateral and longitudinal directionwould exceed the limits of .the gripping force of tire to road.
- On the leve] ofstabilization are two main difñculties: one is the_correct recieving of the
driven Velocity and the Other is the sensation of the vehicle movement and the correct
mental processing of these vehicle dynamics.
From these human defrciencies preliminary ergonornic proposals may be derivated. They are: - On the level of navigation task navigation calculators and the indication of the
recommanded route should be applied.
- On the ler-'el ofgw'dance may recommanded the indication of I techically recieved traffic participiants or obstacles
I respectively controlling of safe distance, overtaking distance and sideward movement I artñcial sight
- On the level Of stabilization the (conventional) indication of speed is necessary. As the out standing problem is here the control of vehicle dynamics, also proposals concerning operating the car are important, like automazed tracking and the active control element (ACE, see Bubb, 1985; Bolte 1991).
In the matrix of ñg. ll the three levels of driving task are. set against the three levels of
information processing. The partition's of this matrix show some examples for combinations of
task-level and information processing. Due to the intention of avoiding dangerous situations it is important to look at the time which is needed to process information on the different levels on the one hand, and the time which is availible on the different levels of driving task on the
other hand. This time variies between milliseconds and minutes until -up to houres. A basic
condition for safety is kept, if the needed time corresponds to the availible time in a given
_15_
;Ö
8
Planning
Manoeuvre
Control
å
(Navigation)
(Guidance)
(Stabilization)
Timeavailible
m
_
,g
sec -(m|n)
sec
ms
. _
l-
_
Knowledge 4:
Navigation in
Controllingaskid
Learneronfirst
,g
strange town
on icy roads
Iesson
E
-Hule
8
Coice between
Passingothercars Drivingan
w
familiar routes
.
uniamiliar car
Skill
g
Home/work travel Negotiationtamiliar Roadholding
junctions
round corners
Pig. 11: Matrix of the levels of information processing and driving tasks
(modified after Hale et al., 1990)
From this consideration the simple general rule may be derivated: By technical and organisational means it is to be avoided, that the dn'ver has to perform knowledge based operations during driving.
In assoziation with the construction of instruments this aim may be achieved, if the indicated
information
- simplyñes decisions; - allows to apply rules, and
- induces a skill based behaviour, by which allready in the forefield the driver keeps out himself from situations inducing decisions.
Derivated from this rules the indication of following parts of information in the HUD may be preposed (tig. 12):
_15_
l proposals for an
:5.T ' 5,: 5,15' ; N V -'^ -_2:::.;-:.:_;'1"-':2 ? :' --.; E :
.4'..'.:;2. l__; . j ' .. .'_ '-Zl_ . :22'1'
- ol speed '
Pig. 12: Proposals for an ergonomic car-HUD
- On the level of navigation the problems of retainability and orientation could be solved by only one indicator: The spot where the driver needs to turn is marked in contact
analogue form by the virtuell' image of an arrow displayed on the road (see ñg. 13). This
proposal is similar to them of Volkswagen. But there is the following difference: given by the Volkswagen-HUD-technique no really contact analoque HUD representation is possible. The idea of the here discussed proposal is: the navigation arrow remains during driving on the same point, whereas the vehicle nears the intersection and the resting arrow.
1 . 4 ': ' .4 : -. . -'.. f-, g's i? gj lm -_ .
Pig. 13: Navigation-aid in the HUD
The behaviour of the driver with respect to this arrow can be described by the simple rule which becames skilled behaviour after a certain tirrie of experience with this kind of display: 'follow the arrow!"
- On the level of gw'dance the indication of the relatively difñcult assessible limitations of the own movement in respect to other traffic participants or obstacles would support 3
success in traffic safety. This cOuld be achieved by the indication of
I braking distance respectiver safe distance, I overtaking distance, and
I maximum sideward distance.
The scene of tig. 13 shows not only the navigation-arrow but also the braking distance. If it is possible to indicate different distances in the HUD, a crossbeam laying in the actual required distance ahead of the car would serve in the best manner as such an
_13_
With the same optical technologythe indication of the distance required for passing under the given conditions would be possible (ñg 14). When the driver uses the blinker lever the distance beam jumps in a swith stage before actuating the real blinker
-forewards in the over-taking distance position.
'w J m ...Ix I\.ä \ n '. ' . . ' X
»MC-a'
' . N '1 ' ' -._'\..\ '. .f "-
._ . - . *x >-\.;..r'-w_.. -. 3. M.:':-. i" _ ' . Gås:- ;ä .__éüts...._.: n.. ,nav-i.:i sig i... . '0. . __ W- <2* *Pig. 14: Indication of the necessary overtaking distance in the HUD
- On the task-leve] of stabib'zation the indication of speed similar to further internal information of states of the car should be done conventionally in an anologue or digital
instrument of the normal dashboard.
4. Consequences for the technical lay-out of a car HUD
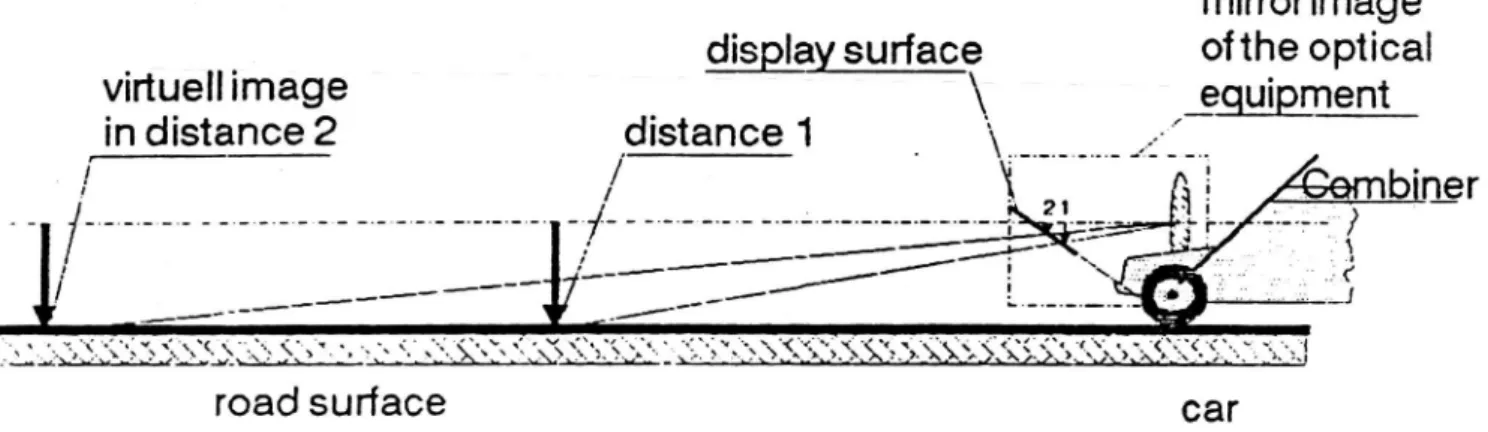
As the HUD should be able to indicate different distances in a contact analogue manner the customary airplane-HUD is to be modified. One proposal is the binocular car-HUD (ñg. 15). The idea' is: the surface of the road is reprojected in a real plane behind the HUD-optic under considering the optical laws. This plane represents the display surface. Now, when a 'real light bar in this display surface moves for example between position 1 and 2 the virtuell
_19-Fig. 16 shows a reconstructed test car, an old BMW 2000, which was equiped with the
technology described above. Ahead of the steering wheel the convercing lense of the HUD
and the combiner can be seen. Fig. 17 shows a view of a traffic scene through this HUD. The
light-crossbeam-in the safety distance ahead of'the car may seen. Also the information of, this
display may be-observed by a simple rule which can became a skilled behaviour during longer
use of the HUD: "drive in such a manner, that no moving or standig obstacles are within the
safety distance!"
mirror image
display surface
ofthe Optical
virtuell Image
\\
egwpment
in distance 2
,distance 1
'
. ,f / _ . ! . .-._.__- _ -.-.-.-.- -.-.-.-._. _ _.-._ -.-... -._.;._....-.-.-.-.-.-._.&._åa,lÅ :. . 4-;_- ______ _,_ LP , ,I // ' ..---"--_-'#-p ./'.'p .4- i . .. . . .. '...."'\/< \ _-7 .w-. ..\ Vä..-.n
road surface
car
Pig. 16: Prototype of the binocular contact analogue car-HUD in a test vehicle.
Whereas the necessan'ty of a combiner, mounted between the drivers eye and the windscreen, by the application of holographicuoptical-:.elements?i'(HOE'§7 today my be avoided (the plane glass-combiner may be substituted by an plane HOE-mirror), anyhow a large reconstruction of the dashboard area of the car is unavoidable. Therefore as a second pr0posal the monocular HUD was worked out (ñg. 18). In this case a relative small lens is used, so that by' the portehole effect only one eye can see the HUD-information. In order to display different distances the lense is to be moved simultaneously with the corresponding variation of the space bem-'een the self-shinig object and the lense. Pig. 19 shows the described mechanical outfit. This equipment is so flat, that it may be mounted additionally on a already finished dashboard. The picture of ñg. 20 shows a traffic scene seen by this HUD. The lens with its frame, the_ mirror image of this frame in the windscreen, and within this frame the light bar may be observed. As the source of this light bar controlled by the shown mechanism and the belonging electronique keeps always the actual correct space to the lense, the corresponding virtuell image is projected in the desired correct distance. Therefore even if the driver moves his eye, the cross beam remains on the indicated spot. Though, if the driver moves his eye out of the areakof the portehole. the virtuell iniage disappears.
Fig. 17. Braking distance respectivels safety distance as seen in the
binocular contact analogue HUD (Bubb, 1980).
viewing lines
viewin lines
_
/_
deflec ed on the wmdscreen /
/7-,'0oI
.._\ I \_ 1 4 -, _.,f .
\\:\\\ mototy adjustable
posmon ofthe lens
Pig. 18: Principle of the monocular contact analogue car-HUD
-.. -. n . . . -. _ -_ -.
.aa maun u Han auo cos 0:a son u :mm m .mus eum wv huwuøm om .www . li ruçl t tu ñhn lzl nl *F ulf. . Ai .. . Si sxåh 4x; n .Ji mi . ÅJK .I FÖ. N.: 24 |\4 .å .r 0. 13: 1. 1.14. 9,1 m.. .. no .: .fr laIr.al 4. .\ .. .. ..227 1. )I. F , 1. 1. . 3. . . o _. / E) .i \. . t