STATENS VÄG- OCH TRAFIKINSTITUT
National Swedish Road and Traffic Research Institute
RESTIDSMODELL FÖR TUNGA FORDON
av
Gunnar Carlsson
Restidsmodell för tunga fordon
Gunnar Carlsson*
Inledning
Vid PIARC:s 15:e världskongress i Prag 1971 presenterades en fysikaliskt baserad modell för beräkning av fria tunga fordons hastighetsförändringar i lutningar. Det matematiska uttrycket för modellen var följande:
dv P 1 Cl-A
<1)
E: m-
v m-wv2 Cr g sini där 1) =hastighet
t =tid
P = av dragkraft utvecklad effekt
m = fordonets massa Cl = formfaktor för fordonet A = fordonets frontarea C,. = rullmotstånd g = tyngdacceleration i = lutningsvinkel
I modellen behandlades effekten (P)
som en konstant och
luftmotståndskoef-ficienten gavs olika konstanta
värden för olika fordonsgrupper. Den gruppindelning som användes var: Grupp 1. 2-axliga tunga fordon Grupp 2. 3- och 4 axliga tunga fordon Grupp 3. 5- och fleraxliga tunga fordon För att testa modellen hade studier av hastighetsförlopp utförts i 18 backar med varierande lutning och längd. Ur det uppmätta hastighetsförloppet be-stämdes för varje fordon medelvärdet
över backen av parametern .
Där-m efter beräknades ett teoretiskt hastig-hetsförlopp med hjälp av den uppställda
* 1 :e nfo-rskningsingenjör
Statens väg och trafikinstitut Kvarnbacksvägen 30
16149 Bromma. Tel 08-98 04- 50
modellen. Detta jämfördes med det upp-mätta hastighetsförloppet och överens-stämmelsen visade sig vara mycket god. Studierna av hur främst tunga fordons hastigheter påverkas av vägens verti-kala linjeföring har sedan den förra kongressen fortsatt inom följande om-råden:
1. Studier av fria fordons acceleration efter backkrön.
2. Studier av uttagen effekt per
mass-P . .
.
enhet m 1 ollka lutningar. 3. Studier av tunga fordons restider
över längre sträckor.
I denna artikel redogöres i första hand för det arbete som utförts under punkt
3 ovan.
Problemställning
Metoder att beräkna fordons restider vid olika väg- och trafikförhållanden är nödvändiga bl a i samband med de lön-samhetsberäkningar som utförs för att prioritera mellan olika aktuella väg-byggnadsprojekt. I dessa sammanhang är det ofta tillräckligt att kunna prog-nosticera hur en given vägutformning kommer att påverka den genomsnittliga restiden för olika grupper av fordon. Den vertikala linjeföringen torde vara den mest väsentliga variabeln för att förklara variationer i tunga fordons res-tider vid normala * flöden. Det ansågs därför troligt att den beskriVande mo-dellen för retardationer och accelera-tioner i samband med lutningar skulle vara väl lämpad att utgöra den grund-läggande delen i en modell för beräk-ning av tunga fordons genomsnittliga restider över längre sträckor vid känd vä geometrisk utformning.
* Med normala avses flöden från helt fria körförhållanden upp till ca 1000) f/h för tvåfältiga vägar.
Vid utarbetande av restidmodellen måste en avvägning göras mellan hur väl mo-dellen skall beskriva verkligheten och hur detaljerade ingångsdata modellen skall förutsätta. Denna avvägning resul-terade i att utifrån en känd vertikal lin-jeföring (t ex genom byggnadsritningar) och känd tvärsektion så skulle modellen kunna prognosticera den genomsnittliga restiden för de tidigare nämnda grup-perna av tunga fordon.
Beskrivning av reslidsmodell Modellen beräknar restider för en tänkt population av tunga fordon inom en given fordonsgrupp. Variationer i for-donens effektresurser inom gruppen be-skrivs av en standardiserad fördelning
P
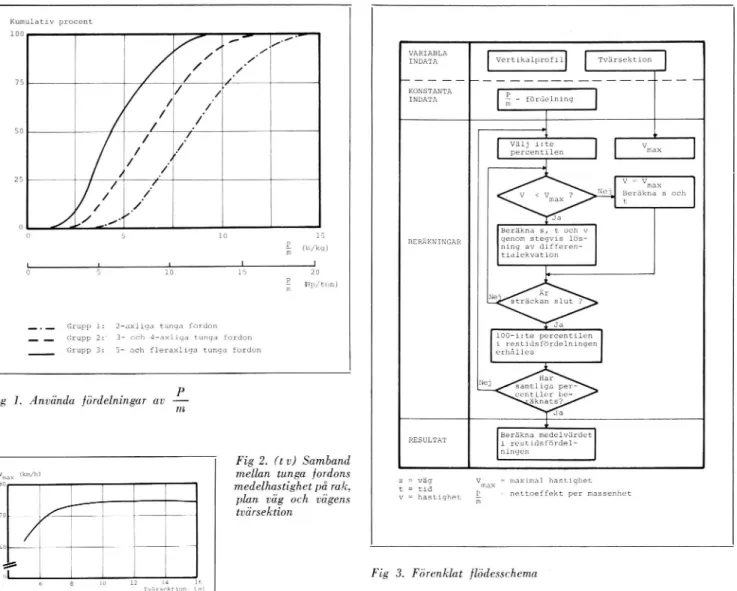
av parameter m se ekv (1). Dessa för-delningar har erhållits genom empiriska studier i olika backar och anses utgöra typiska fördelningar för huvudvägnätet. De använda fördelningarna redovisas i fig 1. Beräkningar utförs för olika
be-.
. P
.
stämda percentller 1 -fördeln1ngarna. m
Vidare införs en högsta hastighet (Dmax) som modellfordonen får hålla då effekt-resurserna medger detta. vmax är det-samma för samtliga beräknade fordon och har endast gjorts beroende av vä-gens tvärsektion. Dettaberoende redovi-sas i fig 2 och bygger på mätningar av tunga fordons hastigheter från platser där linje-föringens inverkan på hastighe-terna bedömts vara liten. Då den erfor-derliga effekten per massenhet för att
hålla hastigheten om överskrider
-värdet så beräknas tidsförbrukning-m
en med hjälp av differentialekvationen (1). Genom att samliga modellfordan givits samma Dmax så kommer det fordon som utgör den izte
percen-Kumulativ procent
100 __V .-*
. VARIABLA
/, 1 INDATA [ Vertikalprofil] [Tvärsektion
75 / 'I. _____ r _ _.__. _____ - t / /' KONSTANTA P / /- INDATA [ E - fördelning | / . / / 50 ' , /' / 1 /' Välj izte v / f percentilen max
/ f ) 1 25 1. v :v ], I» . max
/ / Ne] Beräkna 5 Och
.
t
/ ,/
/ / d/ Ja
0 40'4,
0 5 10 15 " Beräkna s, t och vom ste v's
lös-p _ BERAKNINGAR 9? 9 ; _ _ (h/kg) nlng av dlf eren m tialekvation L 1 | l l 0 5 10 15 20 L P *I ' t, m Gp/ on)
sträckan slut ? __. __ Grupp l: 2 axliga tunga fordon
__ __, Grupp 2: 3 och 4 axliga tunga fordon lOO i:te percentilen i restidsfördelningen Grupp 3: 5 och fleraxliga tunga fordon erhålles
samtliga per centiler be
.. .. . P
Fig I. Använda fordelningar av 7,7
#
Beräkna medelvärdet RESULTAT i restidsfördel
ningen
Fig 2. (t v) Samband
vmax (km/h) mellan tunga fordons. o s = vag.. V = max1mal hastighet. .
medelhastighet pa rak," .. t : tidv : hasti het gmax = nettoeffekt per massenhet
plan vag och vägens 9 m tvärsektion
Fig 3. Förenklat flödesschema
6 8 10 12 6 Tvärsektion' t m
Fig 4. Medelvärdet av restiden för 22 olika sträckor och riktningar. Fig 5. Medelvärdet av restiden för 22 olika sträckor och riktningar. Jämförelse mellan modell och uppmätta data. Fordonsgrupp ] (2- Jämförelse mellan modell och uppmätta data. Fordonsgrupp 2
axliga tunga fordon) och 4-axliga tunga fordon)
Uppmätt restid (sek/km) Uppmätt restid (sek/km)
100 100 90 90 / // 80 / 80 70 / 70 O 5/ o 8 o o 60 __ii 00 O Q 5 st O O O \ \ JU so x
5°
r00
o o 100 [OO / Ä/ 30 30 i s 5 0 0 0 V' 30 40 50 00 70 80 90 100 0 " 30 40 50 &) 70 80 90 100Modellrestid (sek/km) Modellrestld (sek/km) __... Modell och uppmätta data överensstämmer
___ _ Reqressionslinje
_____ Modell och uppmätta data överensstämmer ___ _ Regressionslinje
P
.
tilen i -fördeln1ngen att utgöra den m
100 izte percentilen i den resulterande restidsfördelningen. Beräkningarna har utförts i dator och en förenklad över-sikt av beräkningsflödet redovisas i fig 3.
'l'est av modellen
För att testa modellen har mätningar av tunga fordons restider utförts på 12 vägsträckor med mycket varierande ver-tikal linjeföring. Samtliga mätsträckor ligger på tvåfältiga landsbygdsvägar och årsmedeldygnstrafiken har varierat mel-lan 2 500 och 8 000 fordon. Mätsträckor-na är mellan 5 och 12 km långa och är hastighetsbegränsade till 90 km/h. Samt-liga tunga fordon som passerat har an-vänts i modelltesten således även de som inte farit fria över mätsträckan. Totalt omfattar materialet 2 800 tunga fordon. Medelvärdet av restiden uttryckt i sek/km har beräknats för varje mät-sträcka, riktning och fordonsgrupp. Mot-svarande beräkningar har utförts med hjälp av den uppställda modellen. En jämförelse mellan modelldata och upp-mätta data redovisas för de tre fordons-grupperna i fig 4r 6.
Som framgår av dessa fig är överens-stämmelsen mellan beräknade och upp-mätta data relativt god. För endast 4 av de 66 observationerna är avvikelsen större än 10 %. Av fig framgår vidare att variationerna i de uppmätta restider-na är något större än för de beräkrestider-nade. Detta är speciellt markant för fordon s-grupp 2. En orsak till detta torde vara att modellen endast tar hänsyn till vä-gens vertikala linjeföring och tvärsek-tion. Det finns säkerligen en korrelation mellan olika linjeföringselement, tvär-sektion, siktförhållanden och vägbanans kvalitet där samtliga faktorer är korre-lerade så att de påverkar hastigheterna i samma riktning. Detta innebär att en modell som endast tar hänsyn till vissa
variationsorsaker kommer att uppvisa
en mindre variation än den som före-kommer i verkligheten. I de t empiriska materialet ingår såväl fria som hind-rade fordon. Även detta kan medföra en systematisk avvikelse av observerat slag. För att korrigera de systematiska avvikelserna har en regressionsanalys utförts där modellens värden fått utgöra den oberoende variabeln och de upp-mätta värdena den beroende variabeln. Följande regressionsekvationer erhölls: Fordonsgrupp 2: tm2 = 1,52 - tm1 26 Fordonsgrupp 3: tm2 = 1,11 - tml 6 Fordonsgrupp 4: tm2 = 1,18 - tml 10 där tm1 är restiden i s/km enligt den
fysikaliska modellen och tm2 är res-tiden i s/km enligt regressionsmodellen. De beräknade regressionslinjerna har införts i fig 4 6.
Fig 6. Medelvärdet __ _
av restålen för 22 Uppmatt restid (sek/km)
olika sträckor och 100 riktningar. Jämförelse mellan modell och uppmätta data. For- 90
donsgrapp 3 (5- och fleraxliga tunga
for-don) 80 70 60 50 40 r f 30 ///// / b
.1
O vi 30_____ Modell och uppmätta data överensstämmer Regressionslinje
50 60 70 80 90 100 Model1restid (sek/km)
Tabell 1. S för olika modeller och fordonsgrupper
Modell 1 Modell 2 ,, . .] ,, Fysikalisk modell Enbart fysslkahslkmodell kompletterad med- .
regressaonsmodell Fordonsgrupp 1
2-axliga tunga fordon . . . . 0,32 0,16 Fordonsgrupp 2
3- och 4-axliga tunga fordon 0,18 0,17 Fordonsgrupp 3
5- och fleraxliga tunga
fordon ... 0,11 0,08
För att få ett mått på den fysikaliska modellens förklaringsstyrka och på vad som vinnes i förklaringsstyrka genom kompletteringen med regressionsmodel-len så har förhållandet mellan residu-alkvadratsumman och kvadratsumman kring medelvärdet beräknats:
_ Z D732 (modell)
_ 2 th (medelvärde)
S
där
Di (modell) =Skillnaden mellan
uppmätt värde och
modellvärde för ize
observationen.
D,- (medelvärde) =Skillnaden mellan uppmätt värde för den ize observationen och medelvärdet för samtliga
observa-tioner.
Vid en perfekt anpassning skall S vara
lika med 0. Resultaten är sammanställ-da i tahell 1.
Som framgår av tabellen så ger modell 1 det minsta värdet på S för grupp 3 och det högsta för grupp 1. Detta beror på att de tyngsta bilarnas haStighets-variationer bäst förklaras av den verti-kala linjeföringen. Jämföres de båda modellerna så erhålls med hjälp av re-gressionsmodellen en betydande minsk-ning i S för grupp 1, medan minskminsk-ning- minskning-en är obetydlig för grupperna 2 och 3. Slutsatser
Den använda fysikaliska modellen för-klarar en stor del av de variationer i tunga fordons restider som observeras på landsbygdsvägar vid inte alltför höga flöden. För den lättaste gruppen (2-ax-liga fordon) är det dock lämpligt att korrigera de erhållna resultaten med hjälp av den angivna regressionsmodel-len. Det bör vidare observeras att mo-dellen bygger på givna fördelningar av fordonens effektresurser per massenhet. Ändras dessa förhållanden p g a föränd-rade motorstyrkor och laster måste de använda fördelningarna korrigeras. E]