FLYTTBARA DETEKTORER FÖR TRAFIKMAÄTNINGAR Informationsmöte vid statens väg- och trafikinstitut
den 23 januari 1974
Referat av Stig Edholm
RAPPORT Nr 44
FLYTTBARA DETEKTORER FÖR TRAFIKMÄTNINGAR
Informationsmöte Vid statens Väg- och trafikinstitut
den 23 januari 1974
Referat av
Stig Edholm
RAPPORT Nr 44
2.7
_tut, SUMMARY INLEDNING
SAMMANSTÄLLNING AV DELTAGARNAS INLÄGG
Stig Edholm, Stockholm'
Översikt över detektorer samt redogörelse för utfört och planerat arbete vid-Statens; väg- och trafikinstitut angående detektorer
Statens väg" och trafikinstiw
Slangkännare med membrankontaktgivare
(Slangdetektor) '
Slangkännare med elektronisk pulsgivare
Detektor med ståltrådskännare Motståndsdetektornl
FörSök med flyttbar närvarodetektor
Mats Forsgren och Lars Sandell, Statens
Vägverk, Stockholm
Synpunkter på detektorer för trafikräknare
Michael Gedda, Lunds Tekniska Högskola, Lund
Användning av flyttbara detektorer för
tra-fikmätning r \
Conny Sjöberg, Telefonaktiebolaget
L M Ericsson, Stockholm
Fordonsdetektorer
Jörgen Sterner, Danmarks Tekniska Högskola,
Lyngby '
> Flytbare detektorer
Sylevi Lyly, Tekniska Högskolan i Tammerfors. Några uppgifter om trafikräknare som använ» des vid Tammerfors Tekniska Högskola
Några uppgifter-om den trafikanalysator som beställts av trafiklaboratoriet vid Helsingfors Tekniska Högskola'
F H Amundsen och H Ulleberg, TranSportøkono"
misk Institutt, Oslo
Synpunkter på detektorer 'RTTA'APFYD 'I _. '7
_12
12_
18
19 20 20 21_ 23detectors for traffic studies which was arranged in January,
1974, by the National Swedish Road and Traffic Research
Institute.- Representatives from the different Scandinavian
countries participated in the meeting.
At the meeting information was given regarding where and' when traffic data usually are Collected as well as an
account of the technical data of the Various types of
detectors which chiefly are used in this connection. A
more detailed account was given regarding the passage detece
tors which have been developed at the Institute. Most of
the discussion dealt with detectors of lOOp-type and
prob-lems connected with how to fasten the wire in or on
the-roadway. Certain more comprehensive systems for traffic
på empiriska studier av trafikelementens rörelser. Vid
studier av fordonstrafiken användes ofta detektorer
utlag-da på-vägen Vilka ger pulser när de passeras av fordon.. Denna teknik användes vid t ex studier av tidsluckor, has-tighet, trafikrörelser i korsningar och vid trafikräkning.á Några flyttbara detektorer med tillfredsställande
prestan-da vad beträffar noggrannhet, hållbarhet och handhavande*
finns f n icke att tillgå i handeln.
Vid olika institutioner, företag m m pågår utveckling och
prov med detektorer för olika ändamål. I syfte att få till
stånd ett utbyte av därvid gjorda erfarenheter inbjöd Stam tens väg" och trafikinstitut (VTI) till ett internordiskt informationsmöte angående detektorproblematiken. Deltagarna hade i förväg anmodats att förbereda ett inlägg, varvid
Asärskild Vikt skulle läggas vid att informera om den egna
verksamheten. En förteckning över deltagarna i-mötet finns
i bilaga 1.
"
Reaktionen på mötet var mycket positiv och förslag framkom
om att informationsmöten liknande detta borde
fortsätta--Institutet förklarade sig berett att initiera framtida
informationsmöten angående detektorer.
' SAMMANSTÄLLNING AV DELTAGARNAS INLÄGG
Deltagarna har i efterhand insänt sina inlägg till VTI
och de återges här i den form de insänts. Enär
infor-mationen riktar sig till läsare med kunskaper i
elektro-nik och erfarenhet av detektorer har referaten gjorts
kortfattade.
författare kontaktas.
'ling av trafikdata vanligen utföres.
.Detektorer innehåller den kännande delen av instrument
för insamling av data angående trafikrörelser. Dessa.data
kan inSamlas på olika sätt beroende på syftet med insamé
lingen,
Figur 1 visar en_översikt över i vilka sammanhang
insamm-:Man kan uppdela in" samlingen av data med hänsyn till användningsområde i två grupper nämligen data som används vid drift av trafiksysm temet och data som skall användas i databanker, forskning
m m; Avsikten är här att främst lämna information om dem
tektorer för insamling av data för forSkningsändamål såsom
hastighet, tidluckor m m samt för trafikräkningar.
Detektorer kan vara av prinCipiellt två olika typer. 'Dels
sådana sOm med en kännare t ex en slang markerar när ett
fordonshjul passerar, "passagedetektorer" (alla axlar
mar-keras) och dels sådana som markerar när ett fordon passen
rar eller uppehåller sig på en viss yta "närvarodetektorer'
(t ex induktiva slingor, ljUS* eller laserstrålar).. Till detektorsystemet räknas dels kännaren placerad på, i eller vid vägbanan, dels den elektronik som erfordras för att en elektrisk puls skall erhållas vid axel" eller fordonspassage.
Tabell 1 upptar några olika typer av detektorkännare samt
Vissa egenskaper rörande deras funktion m m. De fyra
första typerna är närvarodetektorer och de övriga passage_ detektorer vilket framgår av signaltyperna för 2-axliga
fordon i kolumn 2.'
/
/
E l e k t r o n i k i s a m b a n d m e d d r i f t av o c h in -f o r m a t i o n o m t r a f i k e n mm. E l e k t r o n i s k st yr ni ng av t r a f i k e n Tr af ik re gl e-r i n gÖve rva kn in g
Avg i f t s ut t a g i t r a f i k e n In fo rm at io ns -öve rf ör in g; va rn in g, up p-lys ni ng m m Insa ml in g av d a t a an g vä-ge n, de ss om -gi vn in g, tr e-fi kr eg le ri ng m m In Sa ml ing av da ta an g tr aa fi ke n In sa ml in g av ol yc ks pl at s-da ta
Insa ml in gav d a ta an g tr a-fike ns eg en -sk ap er (a ll a t yp e r av tr a-fi ka nt er ) El ek tr on is ka väg en ' Sp år ta xi S t yr n i n g av koll ek ti vt ra -fi ke n me d hän -syn ti ll ef te r-fr åg an m m St yr ni ng h Si gn al regl e-ri ng Sa mo rd ni ng av r e g l e r i n g a r R e g l e r i n g av ko ll ek ti vt ra -f i k e n m m Re gl er in g oc h öve rva kn ing Ko nve nt io ne ll el le r aut om a-ti sk öve rva k-ni ng av re gl er för ha st ig he t, i k o r s n i ng a r m m A vg i f t s ut t a g i tr af ik re gl er an de syf te , vi d ha s-t i g h e t s öve r t r ä-de ls er , vid ha s--t ig he ts öve rva k-n i n g m m O m k ör n i n g s va r -na re V a r m a r e för ha l-ka , tr af ik st oc k« ni ng m m. In -fo rm at io n om väg va l I n f o r m a t i o n Tvär sekt io n Ge om et ri Si kt B e l äg g n i n g e n s eg ensk ap er Tr af ik re gl e-r i n g a r Tr af ik fl öd e Sa mm an sät tn in g Cyk li sk a va ri a-_t io ne r Väg da ta ba nk Dr if t av tr af ik sys te me t _ _ i r ' Ir 'I nf or ma ti on om tr afik sys te me t Ol yc ksPI at sb e-st äm ni ng Väg da ta för e oc h ef te r ol yc ks pl atse n F l öd e Hast ig he t R e s t i d T i d l uck o r I n t e r a k t i o n e r Ka paci te t Axe lt ryc k ur 1.
a
Lz.. 1? Exe mp el pâ' i vi lk a sa mm anha ng tr af ik da ta va nl ig en in sa ml as. Gr un dd at a för mo dell ut ve ck li ng oc h va li de ri ngT a b e l l 1. Te kn is ka da ta för någ ra d e t e k tor t yp c r TY P AV DE TE KT OR ER Typ av sign al för 2-axl ig am fo rdon 0 . H a l -b a r h e t M o n t e -ri ng _F le r-fäl ts é mät ni ng ar Ef te r» si gn ae le r Syn li g för tr a-fi ka nt er -na Om fa tt -n i n g av ti ll hö-r a n d e e l e k t r o -_ n i k S t r öm -f ör b r uk -n i n g Ko st na d
Be
sva
rl
ig
L
M yc k e t b e s vär l i o Be ro r på mo nt er ñn : R e l a t i vt s t o r R e l ati vt h ög 'G od Be svär li g '.L c : t h be sV är li g Be ro r på mo nt er üg Re la ti vt stor R e la t i vt hög G o d Be svär li g M yc k e t be svär li g Be ro r på m O n t e r üg R e l a t i vt s to r R e l a t i vt h ög Ra da r -do pp le r G o d ' Be svär li g M yc ket be svär li g -B er or på mo nt er in g R e l a t i vt s t o r R e l a t i vt h ög E l e k t r o m a g n e t i s k a sl in gor a) ne df ra st a b) fäs ta på väg yt an Någ ør l. go d R e l a t i vt s t o r R el a t i vt hög H ög Go d J a _ Ne j Kort va ri g J a J a a) m e k a n i s k k o n t a k t b) e l e k t r o n i s k k o n t a k tL
M
Täm l. r' Go d Ta ml . rr -' ko rtva ii g Besvär li g J a L i t e n or) OKL :4 I b l a n d I n g e n Ne ] O b e t . ( o n t a k t k a b l a r Ka n f äs t a s < Kort vari g J a ' J a L it e n K o a xi a l k a b e l (a n f äs t a s Me de lgod _ J a ' L i t e n d ,4 Of.) St ål 7! " A. .LJ O b e t . G o d Be svär li g Ob et . O b e t . 1' o l k o r n s g um m i b a n d kdKa n áK l i s t r a s Ok änd.
Ja '1-1 Q) 2. O b e t . L i t e n . O b e t .
få.
räkning. De består av en slang (S) spänd över vägen an«" sluten till en membrankontaktgiVare med membranet (M), se
figur 2. När slangen (S) sammanpressas av ett passerande
bilhjul uppstår tryckvågor i denna som fortplantar sig
längs slangen till membranet (M) vars utböjning beror av
tryckförloPpet i slangen. Vid utböjningen uppstår kon"
takt mellan membranet (M) och den justerbara kontaktskru* ven (K) varvid en strömkrets slutes och trafikräknarens
räkneverk matar fram_ett steg. Spelet (L) mellan kontakta'
skruven och membranet justeras på.mätplatsen.till bästa
'.
funktion. Trycksvängningar i slangen kan genom reflexion
ha flera toppar. Bl a detta kan vid felaktig inställning
av spelet mellan membran och kontakt ge upphov till fel" registreringar.
ålêEQEêQE§E§_E§§_êlêEEEQQi§E_EElågiYêäê
Denna detektor som utvecklats vid inetitutet (Edholm och'
Östman) består liksom den konventionella Slangdetektorn
av en slang (S) spänd över vägen samt ett membranhus. Mem* branets (M) utböjning styrs av tryckförloppet i slangen' Och mäts med en töjningsmätare (T) av halvledartyp som
klistras på membranet, se figur 3. Motståndsändringen
(AR) i töjningsmätaren, är proportionell mot membranets
utböjning (d) och omvandlas i en mätbrygga till en mot membranets utböjning (trycket i slangen) prOportionell
(V).
ras vid en axelpassage överskrider diskriminatornivåns
ut-spänning När den första av de svängningar som alstw
gångSläge DO, skärningspunkten (I), erhålles en puls (P)
som markerar axelpassagen. Diskriminatornivån (D).sänks
därefter-till_samma värde som den första svängningens
negativa amplitud (Al) (D1) och stiger därefter med viss
nivån (D) sänker denna till D2.
Detta detektorsystem kan således göras mycket känsligt
utan risk för dubbelregistreringar genom att diskriminam tornivån (D) är prOportionell mot svängningsförloppets
amplitud vid en axelpassage. Någon inställning av detek"
torn behöver inte göras utan inställningen ärngord en
>gång för alla vid tillverkningen. Detektorerna har an*
vänts ett flertal år vid VTI i samband med trafikstudier
och Haldex har infört dem i Vissa av sina trafikräknare,
Spänning'
é :
.
_+14_
{ 1? S _ i * w- l 3' I' . äÄ /' \.. - 4.7,/ // / / Wi:) Z, v . få ut FHM/'Y//i/AQ?/// \///\\\\//«\W \ QWWKWWAW\ »
f.31
l
'
_ M K
'
Membranets utböjning Ställbart spel 1 (L), (diska- l | I minatornivå) // \\\ y % l1
I
[A > '.,
t . äw. Tidl
l
.
I
I
I
l
I
I
*__ Tid strömkretsen är sluten
Exempel på uppmätt svängningsförløpp
P ul s f o r m a r _S la ng kän na re Gi va re Mät br yg ga oc h Di sk ri mi na to r f ör s t är k a r e
:G
422
2ss
xååZ
§äáäz3
35<
äSS
822
§§§zzâézzs
scç/
\\
Mem
bra
nec
sut
böj
nin
g
*
Zeååi
ååååå°3
§ååj
§§åg
-d
2?
+w
D W " T i ? O O Exe mp el på up pm ät t tr yc k-för lo pp i sl an ge nTi
?
V
w,_
'_
_
m_
V.
m.
u%
-Ti
d
Ä
.
*
4
_
IP
ul
s
ut
P
1V
Sp än ning Fi gur 3. S l a n gkän n a r e m e d e l ekt r d n i sk pul sg iva re .typ som använts vid hastighets" och tidsluckemätningar.
Kännaren består av en ca 3-mm tjock järntråd (S) spänd över vägbanan och hålles spänd med en kraftig fjäder, se figur 4. Ståltråden står i mekanisk förbindelse med en
i en skyddskåpa gummilagrad axel (A) på vilken en.mikrow' fon (G) är fäst*
uppstår longitudinella svängningar i denna som fortplan»
När ett hjul rullar över kännartråden
tas längs tråden med hastigheten ca 5000 m/s. Dessa når
mikrofonen (G) och omvandlas där till mot svängningarnav i tråden svarande elektriska svängningar (V) som
förstår-kes. I det Ögonblick (I) den första svängningen som
alstras vid hjulpassage når en ViSS nivå
(diskriminator-(P) som markerar tidpunkten
nivå, D) erhålles en puls
för hjulets passage över kännartråden. Detektorn är
prak-tiskt taget osynlig för fordonsföraren, är hållbar och
dess läge rubbas inte av fartvinden. Den ger mycket exakt
tidsangivelse och är av dessa anledningar lämplig vid;
t ex hastighetsmätningar. Eftersvängningarna är
emeller-tid ofta så långa att den iCke kan användas för axelräk-nande trafikräkning.
Mêêêäåêäêêêêêkêêäê
En ny typ av detektorer har provats vid institutet (Edholm och Östman) med kännare bestående av ett gummiband med
invulkaniserade kolpartiklar. Dessa band ändrar sitt
ohmska mOtstånd när de utsättas för tryck från t ex ett
passerande bilhjul. Bandets båda ändar anslutas till en
mätbrygga med förstärkare och pulsformare och vid tryck på bandet erhålles en motståndsändring AR som ger en puls
ut (P),
klistring och kan användas t ex vid studier på flerfältsm
se figur 5. Bandet kan fästas på vägbanan genom
vägkorsningar. Vägar och i
S t ål t r åd s k än n a r e Di sk ri mi na tør ni vå D %@
*T
id
WW
W'
I.. . Ti d P ul s ut P F i g ur 4. S p än n i n g De te kt or me d st ål tr åd sk än na re .Mät br yg ga , G um m i b a n d s k än n a r e f ör s t är k a r e oc h pul sf or ma re Pul s ut A R Hj u. l { W
'W
W
W
\\"3
::
W
M
A
/
Fi gur 5. Mo ts tån ds de te kt or .Eêzêêk_mêé_ålyäzäê§_9äryê§9駧§5295
Transportøkonomisk Institutt i Oslo och väg- och
trafik-institutet har i samråd med LM Ericsson förberett ett
'prOjekt för vidareutveckling av den konventionella slinga
detektorn att användas främst för forskningsändamål. För
institutets del är målsättningen att utveckla en detektor som i första hand kan användas i följande sammanhang:
1.
Att som närvarodetektor entydigt skilja fordonen åt
i en fordonsström vid punkttrafikstudier.
2. Att ange närvaroe och passagetidpunkten för fordon
vid studier av trafiken i t ex Vägkors.
3. Vid fordonsräkningar.
I alla dessa tre fall är målet dels att uppnå god upplös-ning i längdled och dels att uppnå så stor känslighet
att dragstången mellan dragfordon och släp inte_bryter när-'Varodetekteringen för ekipage med dragbil och släpvagn.
slitstark och om Arbetet
Vidare bör detektorn vara lätt att montera,.
möjligt kunna drivas från ett ackumulatorbatteri.
kommer att påbörjas under juni 1974 och en ny detektor,
JCD 18, som utvecklats vid LM Ericsson kommer då att provas.
Mats Forsgrenñoch Lars Sandell, Statens Vägverk, Stockholm
Synpunkter på detektorer för trafikräknare
Trafikmätningar som utförs i Vägverkets regi är till största
delen maskinella trafikräkningar. Vid dessa registreras
antalet axelpar för viss tidsperiod.
Antalet punkter (avsnitt) som ingår i verkets trafikräkne-"
Den utrustning som används vid räkningarna består huvud_
sakligen av två typer trafikräkningsinstrument. Dels en
accumulerande räknare försedd med programverk, som'möjw
liggör en på förhand vald räkningsperiod, dels en typ
som i klartext på en pappersremsa ger summa axelpar för tidsperioder som kan väljas mellan 5"60 minuter med vissa
intervall. I denna räknare registreras även datum och
klockslag.
Som detektor används på samtliga instrument slang i kom"
'bination med mekanisk eller elektronisk kontakt.
Med hänsyn till att antalet räknepunkter är stort, att räkneperiodens längd endast uppgår till l-3-dygn vid varje
räknetillfälle samt att räkningarna utförs i ett "rullande
system", krävs att hanteringstiden för utrustningen är
kort. Förmodligen skulle hanteringstiden vara lika kort
om slingdetektorer användes men det förutsätter att samt* liga räknepunkter i förväg var utrustade med slingor. Detta skulle dock innebära helt andra kostnader med hän" syn till det stora antalet räknepunkter.
Naturligtvis förorsakar användande av slangdetektorer en
hel rad problem, speciellt ur väghållningssynpunkt och
därför är slingdetektorn intressant speciellt vid räkningar
i samma punkt under lång sammanhängande tid (helt år) men
även vid korttidSräknade punkter på motorvägar. Det verk»
ligt stora problemet är dock de svärigheter som uppstår genom att vid räkning med användande av slingdetektor er-hålles antalet fordon medan slangdetektor ger antalet
gåelpar. Givetvis kan man med speciella undersökningar
(t ex stickprov) kartlägga trafikflödets sammansättning_
med tanke på de enskilda fordonens axelarrangemang och därigenom räkna om antalet fordon till antal axelpar men detta skulle innebära avsevärda kostnadsökningar för de trafikräknesystem verket f n använder.
Michael Gedda, Lunds Tekniska Högskola, Lund
Användning av flyttbara detektorer för trafikmätning
Under 1973 utvecklades vid institutionen för trafikteknik
vid Lunds tekniska högskola, en trafikdatalogg med 21 kan
naler (20 binära, l digital) för automatisk registrering.
Denna samt ett uppdrag att utföra mätningar av acceptera" de tidluckor i icke signalreglerade korsningar aktualise
rade nyanskaffning av detektorer; Inom institutionen an*
vändes tidigare för trafikundersökningar huvudsakligen gummislangar köpplade till.pennskrivare eller räknare. Bland de krav Vi ställde på detektorerna i samband med
mätning av tidluckor var t ex (utan rangordning):
a) .§n.regiStrering per fordon
b) Väl definierad detekteringspunkt (i tid och rum)
0) Cyklar skall ej detekteras
d) Okänsliga för yttre påverkan. e) Flyttbara, lätta att installera
f) Hög tillförlitlighet
g). Snygg puls
h) "Lagom" utbalanseringstid (gäller slingor)
i) "Lagom" pris
k) Strömförsörjning via ackumulator
Tidigare använda gummislangar uppfyller huvudsakligen
kraven b, c, e, f och k. Kravet om en registrering/fordon
är mycket angeläget då det dels ökar mätutrustningens
kapacitet (antal fordon/tidsenhet), dels förenklar beräkml
ningsprogrammet. En detektortyp, som tillgodoser detta
En mindre teSt av induktionsslingors lämplighet i samband
med mätning av tidluckor utfördes. Testet.avsåg läggningsä
metoder, detekteringspunkter samt känslighet och
Sling-konfiguration; Testade slingdetektorer var av_fabrikat
LME typ JCD 15, en närvarodetektor medreläutgång för både
till och frånslag.' ' '
Fyra.läggningsmetoder provades:'
. Tejpning med Scotch Lane
l
2, Spårfräsning och återfyllning med sand 3, Spårfräsning och återfyllning med beguma
4 . SpårfräSning och återfyllning med kall asfalt
Vid provtillfället var vägbanan fuktig. Lufttemperatur
i SOC. Fräsningen utfördes med en mindre fräsmaskin med..
5' roterande cirkulär slipskiva. Spåren gjordes med 5 mm
bredd och 20 mm djup.
Tillförlitligast och snabbast Visade sig alternativ 4 vara,
alternativ 1 fungerade ej, Läggningstiden för en slinga
med 6,5 meters omkrets var ca 15 min. Hål för
anpassnings-dosan är ej inkluderad. r
Undersökning av detekteringspunkt genomfördes med hjälp
av institutionens trafikdatalogg. Två 6,5 meters slingor
lagda dels i kvadratisk form, dels rektangulär (1,0 X 2,25) kördes över varefter man beräknade fordonets läge när
detek-'teringen påbörjades resp avslutades. Fordonstyp, hastige
het samt placering över Slingan varierades. _Lastbil'
(Scania), personbil med motorn.fram (Austin Maxi),.personw
bil med svansmOtor (VW)-samt cykel användes.
HaStigheten
varierade- mellan 5 och 35 km/tim. gResultatet plottades-i dplottades-iagram. Detektering av cyklar undvikas om detektorer- . nas förstärkarenhet inställes på lägsta känslighet. Detek"
teringspunktens variation i rummet medför att'induktiva. slingor, utan vidare åtgärder, icke lämpar sig för Studierv
fyller induktiva slingor huvudsakligen a, d, g och h.
För att erhålla en Väl definierad detekteringSpunkt Och
undvika inverkan av_ev "spökpulser" utprovades en
kOmbi-nation av gummislang, induktiv slinga och logik. *Detta visade sig vara lämpligt för våra.ändamål. Systemet
funge-rar enligt följande: Ett fordon passerar in över magnete
slingan och ställer därigenom-en bistabil vippa så att signaler från_gummislangen kan registreras.l Efter det att första-hjulparet (ej cykel) passerat gummiSlangen och for*
donet därigenom registrerats brytes kretsen. Ny
registre-ring kan ske först efter det att nästa fordon kört in öVer
slingan.
Närvarodetektorn och logiken styr alltså slang*
detektorn. -Systemet uppfyller tidigare upp5tällda krav.
Systemets logik kan kompletteras så att det blir riktnings-_
avkännande och/eller kan förutom att ge en registrering I
per fordon samtidigt digitalt ange antalet axlar hos for*
donet. Logiken kommer dock till tidigare nämnda
tidlucke-mätningar endast att kompletteras med riktningsavkänning..IN
_
^
'
'
'.' ' _
UT
AVSTÅND A I. x ' FÄRDRIKTNING _ : * .'. I L3 ' FÄRDRIKTNING4 _ _
FRÅN Höw - ; . m! 7 'L M _: . GER A . ' . >. , _ ' _ SLINGKAW . Y
.(14) -
,, '
År??Å\
195 mmm/.Ye/w; ,_1 1 ..
._1
x 0 .I
:.
I
I
I .siA{
i
'
4.
V
1 .
.
.a%
_l
5_ >
7,5 AVSTÅND (M)
1,5
(TS
FququNGANS
'
j
§_
Å:
.- w"
_
.mmmmkmwr
"»
'-
'
.
§LÃN§F9R§ l,§ 5 1,2 g .(uppdelñing på olika hastighéter
- ' ' 1 visar ingen skillnad) 4
. 1...'
-IN
:' § '
°_' '
y.'*
>UT
(bi).
§LÄN§FQR§ ;240 x_1L0 M (Uppdelhing'på olika hastigheter
' - - visar ingen skillnad)- ' .
;u4L_w
o o VW
_Åwywl-
AUSTHQFmXI
Jiyeå.
ALASTBIL
IN
DRTEKTERINGSPUNKTER DÅ FORDONET KÖR IN.MOT
SLINGAN
UT
DETHKTERINGSPUNKTER DÅ FORDONET KÖR UT FRÅN
SLI N GÅN_Conny Sjöberg, Telefonaktiebolaget L M EricsSon,-Stockholm
Fordonsdetektorer '
detektorn, JCD 18, beskrevs i korthet.
_förläggning av flera slingor intill varandra.
I framställningen redogjordes i korthet för.LME:s fordons?
detektorer JCD 13, JCD 16, JCD 17 samt slingorna JOD 101
och JOD 102.
till samtliga deltagare vid seminariet.
(Finns att läsa om 1 häfte som delades ut
Se bilaga 2.)
Vidare redogjordes för arbetsprincipen och en del
mätvär-den på LMEzs ködetektor (analog detektor). Den senaste
.Bland annat nämna
des möjligheten till olika frekvensval, vilket möjliggör
Prov av
detektor JCD.18 kommer bl a att utföras tillsammans med VTI.
'Problemet
Fast installerade slingor eller flyttbara.
iLösningar'OCh synpunkter
För tillfälliga fordonsmätningar av antal, tidsavstånd mlm
kan slinga vid"gynnsam väderlek fästas på körbanan med tape eller någon fästande massa. Förmodligen måste
sling-tråd och eventuellt anpassningsenheten kasseras efter ut"
förd mätning. Huruvida aluminiumtape är lämplig som slinga
tråd, får de prov utvisa som skall göras inom kort. Antag*
ligen är fukt på körbanan ett svårlöst problem. Vid åter"
kommande eller längre mätningar på samma plats rekommene deras fast installerade slingor enligt den metod, som an*
vänds för Våra trafiksignalanläggningar.
' För trafikräkning har bl a Nacka och Lidingö lagt slingor
som är 1,5 x 2 m (1,5 m i färdriktningen). Dessa slingor
så att ett fordon alltid ger en impuls.
_Fordon med släp
ger tvâ impulser, såvida kopplingen mellan dragfordon
och släp inte är_onormalt kort.
'Jörgen Sterner, Danmarks Tekniska_Högskola, Lyngby Flytbare detektorer
Fra dansk side er interessen for dette problem stort
-menmulighederne for att seette forskningsmaesSigt ind
små.
Vi har kun erfaringer med anvendelSen af kontaktkabler;
De har vanxn: anvendt til en lang raâdqa videnskabelige
målinger til belysning af de grundläxxxnmka
trafikafvik-lingsmaäüüçma relationer (Jens Rørbech).
Kontaktkablerne
har en raekke udmaerkede egenskaber:
- de kan placeres meget nøjagtigt på kørebanen
* de kan "skjules" med farvet tape
* de giver et meget eksakt signal.§
Tilgengaähi har de nogle ulemper, som også bør tages i betragtning:
* de er relativt dyre ca 100 kr pr m
- de er temperaturfølsomme, idet man risikerer, at der
ikke sluttes kontakt ved temperaturer under ca 6w8OC
på grund af materialestivhed
* de er fugtfølsomme, og man kan risikere att få konstant
kortslutning efter regnbyger.
_Vor konklusion er, att kontaktkabler er virkelig udmäukede
i forbindelse med videnskabeligt arbejde, hvor man frit
Som eksempel på en speciel anvendelse af kontaktkabler
skal naänuäá en måleserie i en bygade, hvor interessen
var knyttet til bilernes placering i køresporet. Et kontaktkabel blev skåret op på bagsidan, den nederste lamel overskåret med 15 cm afstand og derefter påloddet
en ledning for hvert element.
ønsket til en flytbar detektortype er naturligvis at få
en detektor, som
- hurtigt kan laegges ud på vejen
*- er skjult for trafikanterne
- er pålidelig under alle vejrforhold.
På Instituttet for Vejbygning, Trafikteknik og Byplan
. laxHüJm; håber Vi i løbet af efteråret at kunne udføre
forsøg med koaxialkabler,.idet Vi mener, at denne
flyt-bare detektortype eventuelt har de ovenfor angivne egen"
skaber.
Sylevi Lyly, Tekniska Högskolan i Tammerfors
NågäêlEEB§å§E§§l9@_Eäêåikäêäâêäê-§9E_ê22§9§§§_22§_
?ämmêzågrê_Iêêaiêkê_äêg§ä912
Apparaturen består av:
- 2 st Ulmaelektro Oy:s detektorsystem ULUCAR, Vilka
båda är avsedda för tre körfält.
n 2 st Westinghouse> Pulse-OwMatic WRuC4 magnetband"
Apparaterna är placerade i ett stålskåp, 152 X 70 x 33 cm. Bandspelarna står i förbindelse med induktiva slingor
pla-2
cerade i vägbanan ø 8°mm, 2 x 2 m .
AFunktion:
Impulserna från detektorerna går till bandspelarens datan
kanaler och registreras där var 15:e minut.
Bandspela-rens kassetter bytes en gång i månaden och översättes till
form; som passar för ADBnbehandling. Vägverket har be»
ställt 50 räknare för tvåfältiga vägar försedda med en
bandspelare. Helsingfors stad har köpt en räknare med
två bandspelare med Siemens detektorsystem. Räknaren
kos-tar ung 15 000 ka.
-BågäêrEEPgiååêE_QE_§§Q-Eäêåiäêâêlzêêäâä_§99-§§§E§llê§_êy
Såååiäl§§95§295å§3_2l§_§§lêåâgäêäê Iêäêiêäêläêáêäglå
Trafikanalysatorn har beställts från Nokia Ab och skall
vara färdig våren 1974. Analysatorn innehåller en minia*
tyrdatamaskin, typ Nokia "MikkO", en magnetbandspelare
(l/2") och ett antal induktionsdetektorer. Maximala
anta->let detektorerasom kan anslutas är omkring 26, men hittills har endast 16 st beställts."
Detektorerna skall arbeta parvis och varje detektorpar ut" Mätningar kan utföras av trafik"
' De beställda 16 detek*
gör en mätningspunkt.
mängd, haStighet och fordonslängd.
torerna kan användas för högst 8 mätningspunkter.
Datamaskinen registrerar för varje detektor bilarnas in" och utgångstidpunkter och räknar av dessa hastigheter och
längder för bilarna.' Resultatet skrivs på magnetband,
som kan vidare behandlas i större datamaskiner. Analysa»
'"M$ Mt' ...g-_Fa_- . i t !
r
M' 1;.:
ør--n- ""'° ". fgåf:fz,ø' ,ftW
*w*
M'
///,///////_//////////// w/ J \ñø:;.
.« .1151 Må man... '-0' I ?.. .busa annu. .sin
/ Om m pmm. M M ' W
...355
I
'/
l'
m/
'mä'
I nu nu../
m.A...an
man.. .in/
0.'- M M mh ut. av*m
52
0
8 0 .unnagågp Jfñgpa .15) ti§1ün i'* 7://///:f///7//1///49///2
än W\ :v. ç 5%: . M -m 1 Q3 TYP! WR-ác '_ RECGRDER 15 man nu 120 v' 60 v.:... . . vw : a v-n um e u. -:i _-4g: - Putse Re'ceivers . i; And Recorders _ :E
. .41.. -. - d WRo4C . '.- v /-Types WR 2C an fä.. .En _" __ g J_ - 'x : rI * I 2: V (1- 4 D A
For Use ln_ Pulse-O-Mattc J ,f V _ -' "Se i" " '2 i 57'
Computerized Mete'mg Systems
r -5
-i.
' ; år; 35'51
;: :2 g: '5' ;: 2-.::r ,g 2; .3;
3 's 55 'i : 2 .'21 :5. ' m:- m _ _54 'g :Li L' V Ä . Q 3. *t ot al -1 ." l i
4.:.
_...
« . iwr v* w wa .. g. . , 4 3 0 0 ) 0 7 H O . ..0/ mm 2000000 .4\\ t) sme. 2460502000 Q_ ' v.«u« --'u.a\.-.F.H Amundsen och H Ulleberg, Transportøkcncmisk Institutt, .Oslo
Synpunkter på detektorer
TøI har kjøpt 7 stk Sarascta mark 15 E detektorer i l973.
Disse_drives på 28 VDC og har TTL utgang. Hensikten var
0
a måle hastighetsendringer ved bremsing i kurver og kryss. Sløyfene festes til asfalten med klammer og aluminiumstape. Holdbarheten varierer fra 2-7 døgn avhengig av trafikkmeng"
den. Sløyfene lages av 3 turn med 1 x l;5 m2 tråd, Og ca
2 x 2 m i firkant. >Induktansen blir da ca 115 un, hvor
detektoren arbeider best.å Sløyfene prefabrikeres og legges så på asfalten og detektorene tilkcples. Ledningene fra _sløyfene tildetektorene må festes til asfalten helt inn
til koplingspunktet på detektcr, Man har dårlige
erfaringer-med løse ledninger, da disSe kommer i bevegelse ved Vind
og passeringer av kjøretøy. Dette forandrer induktansen_
og vanSkeliggjør registreringen.
Selve registreringen går inn på Facit 4070
hullbåndpunch-Via et interface-nettverk. Det har vanñ: brukt opp til 6 sløyfer og detektorer ad gangen ved måling i kurver, med
godt reSultat.
HaStigheten på punch er 20 frames pr sekund, men man håper
å kunne gå over til trigging og tidsmultiplexing av
syste-met i fremtiden. 'Videre arbeid:
Kontrollere nøyaktigheten på Systemet
Kontrollere om trafikantene cppdager_sløfene
Anvendelse i datainnsamling 0 " Q W N H
- Eksperimenter:
_TøI har foretatt en del prøver medlen flat kabel istedene
for sløyfer.
Dette er kabler som er henholdsvis 4 og 2 cm
brede og med 6 og 4 ledere som blir koplet som sløyfer.Disse blir lagt på asfalten vinkelrett på kjørebanen og
koplet til detektoren. 'Man oppnår her.en induktans på størrelsesorden 20w30 pH, og dette er for lite for Vår
detektor som arbeider best rundt 115 pH, Men man Oppnåâde å detektere alle små kjøretøytyper, men mistet alle store
og høye_typer. Det skulle bli fullt brukbart med en
kHz.:-p E,L TA 'GA R L i
TDANMARK
Civ ing Jørgen Sterner Danmarks Tekniske Højskole
Bygning 115 ' .
.2800 LYNGBY
FINLAND
Professor Sulevi Lyly Tekniska Högskolan
i Tammerfors _
Byggnadsavdelningen TAMMERFORS
NORGE
-Siv ing-Helge Ulleberg
Transportøkonomisk*Institutt'
Stasjonsveien 4
OSLO 3
-Siv ing Finn Harald Amhndsen.
Transportøkonomisk Institutt_
Stasjonsveien 4 '
-OSLO 3
SVERIGE
f
Övering Mats Forsgren
Statens Vägverk Fack'
102.20 STOCKHOLM
Byrâdir Lars Sandell
Statens VägVerk 'Fack
102 20 STOCKHOLM
-SVERIGE
CiV ing Mikael Gedda; Tekniska Högskolan i Lund _Institutionen för trafikteknij
Fack 725 220 07 LUND
Civ ing Conny Sjöberg
[Telefon AB L M Ericsson
Mi-divisionen' Telefonplan
126 25 HÄGERSTEN
Forskn chef Börje Thunberg Statens Väg- och trafikinst A KVarnbacksvägen 30
161 49 BROMMA
Övering Stig
Edholm-*Statens väg- och trafikinst'
Kvarnbacksvägen 30 161 49 BROMMA
Avdelningsdir Björn Kolsrud Statens Väg- och trafikinst
Kvarnbacksvägen-3O . "
161 49 BROMMA
1:e forskn ing Carl Anlêr.
Statens väg- och trafikinst' - Kvarnbacksvägen 30
161 49 BROMMA
1:e forskn ing Claes Östman
Statens Väg* och trafikinSt
Kvarnbacksvägen 30 161 49 BROMMA
Dagens trafiksignalanläggningar kräáêr nästan alltid någon form
av-pinfOrmation om trafiken för attarbeta tillfredsställande; .För att
erhålla denna information använder man sig av fordonsdetektorer och
i 'gångdetektorer. ' I ' ' ' ' '
Den indikering som erhålls av en fordonsdetektor är en primärinformation,
som i regel skall behandlas-på något sätt i den apparat som den är anslutel 'till. Den information, som.man slutligen kan få av indikeringen, är t eX*
antalet fordon, fordOnstäthet, köealler hastighet. _
, En gångdetektor är avsedd_för gående, 80m genom att påverka
detektorn-_ garanteras erforderlig gröntid och utrymningstid. .
: »OLIKA
AV FORDONSDETEIICPORER
På marknaden finns i dag ett stort antal typer av'fordonSdetektorerQ
Bland de vanligast förekommande kan nämnas; .. * _1'?.71; iTrkadetektorn.
Tryckdetektorn arbetar pneumatiskt.elier hydrauliskt och består i regel av en gummislang5 ett membran och en-elektrisk kontakt. Då ett fordonen
hjul passerar över gummislangen uppstår en tryckändring, som.via memp
branet påverkar den_e1ektriska kontakten. '
4_Eftersom gnmmislangen monteras påçyägbanan, blir den lätt sårbar och
_ 'används endast .för tillfälliga trafikräkningar och dylikt.
'Magnetiska detektorn.
. Magnetiska detektorn består av två delar, en sond och en förstärkare.
_ Sonden är i princip en spole, som grävs ned i Vägbanan och avkänner de förändringar i jordmagnetiska fältet som.uppstår då ett fordon passerar. Den främsta anledningen till att detektorn inte har kommit till någon»
större användning är dess begränsade detekterinsyta, vilket bl a inne
-bär att cyklar ej kan detekteras. ' > *^ '
(Dopplerprincipen). Detektorn ger alltså via dess mottagare ett direkt
mått på hastigheten. I en förenklad version av detektorn erhålls endast .en indikering på att ett fordon passerar._ Radardetektorn ligger i en'
relativt hög prisklass. ' '
Ultraljuddetektorn.' ..
Det finns två arbetsprinciper för denna typ av detektor, nämligen
deppler-principen för hastighetsmätning, på samma sätt som radardetektorn, och mätning av löptiden för en ljudimpuls ?rån avsändning till mottagande;
Kommer ljudpulsen tillbaka tidigare än en specificerad tid är det.en
in-dikation på att det finns ett fordon i strålningsområdet.- Ultraljud;
.detektorn har_en något begränsad detekteringsyta och medför i allmänhet
höga kostnader för monteringsmateriel. 7
Fot0eelldetektorn.
Detektorn består av en ljuskälla och en ljuskänslig mottagare. Då ljuset till mottagaren bryts påverkas, via en fotocell i förstärkaren, ett relä.
1 Denna typ av detektor har inte haft någon större betydelse i trafik; '
.signalsammanhang, beroende på miljökänSlighet, men den används t ex i
parkeringshus och vid automatisk styrning av portar. ' '
Induktiva slingdetektorn._
Den induktiva slingdetektorn är den vanligast förekemmande detektorn;
Slingorna är väl skyddade genom sin förläggning under vägbanan och_den
yta man önskar avkänna för detektering kan beStämmas av slingans figuration.
Eftersom L M Ericsson sedan 1940-talet nästan uteslutande använt sig av
den induktiva'Slingdetektorn för trafikreglering är det motiverat med en
.närmare presentation. ' I '
_ Den induktiva slingdetektorn består av två delar, nämligen.en slinga som.' -läggs ned i gatans slitlager och en förstärkare som avkänner den
induktans-ändring i slingan som orsakas av ett fordon. Genom att kombinera förstärkaa
rens egenskaper med slingans geometriska utformning kan man få ut ett antal
olika informationer. ' 5 ' '
Passagedetektorn är den hitintills mest använda.detektortypen för
trafik-styrning. Den används bl a för räkning och anmälan. Passagedetektorns
förstärkare arbetar efter en princip som gör den relativt okänslig för
_temperaturändringar; åldring i-komponenter-m m. Fördelen med en passagen.
.detektor är att man kan täcka flera körfält med en slinga. .Om slingan
beläggs i ett körfält, t ex av en parkerad bil, kan detektorn efter en mycket
kort utbalanseringtid indikera fordon i de övriga körfälten. '
indikerar fordon som befinner sig inom.detekteringsomrâdet. Sann
närvaroindikering måste användas på t ex parkeringsplatser. Det
föreligger en Viss svårighet att göra en'stabil och samtidigt känslig sann närvarodetektor på grund av att den har en arbetsprincip som gör den känsligare för temperaturväxlinger än pessagedetektorn.
Med "ej sann" närvarodetektor menas en detektor som under en begränsad
tid skall indikera ett fordon. 'Således skall indikeringen försvinna
efter en viss iida Denna tid kallas utbalenseringstid.r Utbalenseringsm
tiden är i första hand beroende av förhållandet mellan slingans hele yta och den del av slingans yta som täcks av exempelvis ett feedsn.
L M ERICSSONS FORDONSDETEKTORER Detektor JCD 12.
JCD 12 än en sann närvarodetektor (blockschema fig 1). En oscilletor,
som är avstämd till ca 125 kHz,.metar slingan Via ett drivsteg. Oseilu
'latorsPänning och slingspänning'fasdetekteras och den detekterade"fesm,_
skillnaden_utgör en.spänning som förstärks och driver ett utgångs» ' .
,relä. Läm lig omkrets på slingan är_10 till 14 meter. (Cyklar kan inte
"detektegas§. _ I ' '_ '. ' w
* Detekt0rn matas med 24 V glättad likspänninggl
Detektor JGüuljs
JCD 13 är enpassagedetektore(blockschems fig 2). Den detekterade fasa
skillnadens likspänning påverkar en ntjämnare (eller en utbelanseringsn
krets) i form av enukondensatorg Ändringen i likspänningen:på utjämneren
förstärks och driver ett utgångsrelä. Utjämnaren ger även tidskonstenten
för utbelanseringen av fordon sem.stannat över slingen. Lämplig omkrets'
på slingen är 4 till 26 meter. Detektor JCD 13 detekterar cykler då
slingen läggs i 450 vinkel med färdriktningen. Detektorn matas med 24 V
glättad>likspänning. ' < ' '
Detektor JCD 16.
*JCD 16 är en "ej sann" närvarodetektor som finns-att'tillgåñ'i två
utföranden, lång och kart utbelenseringstid. JCD 16 arbetar förutom
med de slingor som ansluts till JCB 12 och JCD 13 med slingor på uppv
till 110 meter i omkrets. rDetgkâgrn har därför ibland även kallats
"longuloop defekter. JCD 16:8 blockschema framgår ev fig 3. Den detekternde fasskillnedens spänning förstärks och en del matas här
tillbaka till feedetektorn via den automatiska feskontrollen. Det ger
en'utomerdentligt stabil detektor. Den förstärkta fasskillnsden driver
_ett utgångsrelä. '
Detektor JCD 17.
3 '
_ -
'
'
,
Detektor JCD 17:e arbetssätt och känslighet överensstämmer med ,
JCD 16:s_(se blockschema fig 4). JCD 17 som är avsedd för
elektro-niska styrapparater har inget utgångsrelä utan är försedd med logi§-).utgång-för mikrokretsar. I detektorn ingår även vissa kretsar för
riktningskänning.m Detektorn matas dels med 24'V'glättad likspänning
och dels 5'V stabiliserad likspänning för logikkretsarna.
Ködetektorn.
Detektor JCD 16 och JCD 17 har förutom_sitt utbeSked för
detektor-impuls en analOg utgång. Denna utgång ger i detektorns viloläge en
utspänning på ca 0,7 V. Då detektorslingan blir belagd med ett fordon
stiger denna spänning och vid full beläggning av slingan är utspänningu
en 8n12 V (beroende av slingstorlek). Med hjälp av en ködetektorf
(se blockschema fig 5) som ansluts till-den analoga utgången kan ;man
få besked om när en inställbar spänningsnivå eller ett fordonsantal har
överskridits (se fig 6). En lastbil ger ungefär samma analoga signal
som_en personbil. 1Den större metallmassan hos en lastbil år kompenserad
av den större höjden över slingan; En lastbil med släp ger samma
ana-loga.signal-som.tyå personbilar. En buss, emellertid, ger en analog
"signal som mOtsvarar något mer än tre personbilar.. Med slinga som är f40 m lång och 2 m bred år noggrannheten för mätning av antalet personu
bilar i en personbil. 7 v
KRETSKDRTEN
Kretskort för JCD 12, JCD 13 Och JCD 16..
.Kretskorten för JCD 12, JCD 13 ochLdCD 16 består av transistoriserade
_kretsar och i Vissa fall mikrokretsaf.. Samtliga komponenter är av
sådan kvalitet att de uppfyller militära normer. Kretskorten är
' av instickstyp och därför lätta att byta ut. De skall vara placerade så att de är skyddade mot fukt och Vätag JCD 12_0ch JCD 13:e
krets-kort skall vara försedda med skärmkåpa för att detektorn inte skall
_påverkas av yttre störningar; För JCD 16 krävs ingen skärmkåpa.
Kretskort för JCD 12 heter BOA 213 80Q/1.
_ Kretskort för-JOD 13 heter BOA 213 801/2.
Kretskort för JCD 16 närvarotyp heter BOA 213 81Q/1.
Kretskort för JCD 16 passagetyp heter ROA 213 81Q/2.,
är bl a transistorer och mikrokretsar. På kcrtets front finns uttag för anslutning av trimningsinstrument samt.lysdioder som
tänds vid detektering. Kretskortet är av inatickstyp och
skall-vara placerat så att det är skyddat mot fukt och Vätag Skärmkåpa
.erfordrag inte för åetektorne '
Kretskort för två JOD 17 med
lång utbalanseringstid heter BOB 323 1001/1.
Kretskort för två JCD 17 med '
kort utbalanseringstid heter ROE 323 ioor/2.
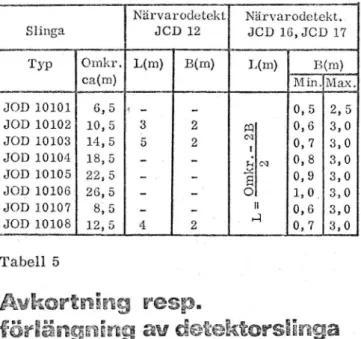
DETBKTORSLINGGR Slingtyper.
'Detektorslinga JOD 101 består av slingtråd; 6085 med anpassningsa
enhet och matningskabela Slingtråden finns i åtta olika längder
mellan 6 ech 26 meter°
Detektorslinga JOD 102 består avdasa med anpassningsenhet och
'matningskabel.v Till dosan annluts en plastisolerad kabel_vars
längd kan vara mellan 22 och 116 metero' ' '
LTlll°Båäá §llngtypérña är ca 15 meter i matningskabel anslutenä
Nedläggninggl
Slingan läggs ned i ett Spår i vägbanan sem inte behöver vara
mer än'ö mm brett Och 25 mm,djnpé. Spåret fylls igen med asfalt
eller någon annan lämplig massao Ånpassningsenheten nam består V
av en eller två konäensnåarer har en hög såabilitet men en begränsad
temperaturiålighete Därför bör kall asfalt, t ex Campmac, packas
runt dosan áå fyllning av Varm asfalt skall ske.
Spåret i vägbanan kan t ex göras i snmbanå med läggning av analt (topplagret) gencm ätt före asfalâeringên lägga smala träribbor
åär slingan sedan skall placerase Då man skall lägga ned en slinga
i en vägbana som tidigare är asfalterad, använder man sig lämpligen av en maskin med en roterande slipgkiva för fräsning av_gpåret.
(Se fig 7 och 8)e En utförligare beskrivningnv slingans nedm
:läggning_iinns i broschyr Ml/B B 1604.
med avståndet i höjdled. .Lastbilar med stora hjul och höga Chassin riskerar därför att detekteras per hjulpar eller per axel.
Nårvarödetektor JCDV12 har en relativt'låg känslighet, varför den effeku tiva detektorytan i trafikriktningen alltid blir_kortare än den som'ut_.
görs aV Slingans omkrets. v .
. Verklig längd
3 m
4,0 m
5 m
-(Bredd 2,2 m)
4 Effektiv längd ca 2 m 2,5 m 3 m V
Passagedetektor JOD 13 har hög känslighet, varför den effektiva detektorn
ytan är något större än den yta som slingan täckere Man skall därför und»
Vika att placera slingans kortsidor närmare än 0,5 m från intilliggande
körfält. Vid en slingbredd på 1,1 m har man den gynnsammaste känsliga
heten för detektering av fordon(inklnsive cyklar).
-JCD 16 och -JCD 17 kan i samband med trafikstyrning användas som passage- *
eller närvarodetektor. (
Vid passagedetektering sträcker sig slingans effektiva detekteringsyta ca 0,5 m utanför slingans kortsida och ligger ungefär i jämnhöjd med
slingans långsida. Den effektiva detekteringsytan hos närvarodetektorn
JCD 16 och JCD 17 med en medelstor slinga, ca 15-40 meter i omkrets,
sträcker sig ca 0,5 m utanför slingans långsida och ca 0,5 m innanför
slingans kortsida. För större-slingor,.a0u110 m i omkrets, blir den
effektiva detekteringsytan något mindre. .Hos JCD 16 och JCD 17 finns
vid behov möjlighet att höja känslighetenc Den effektiva detekterings»
.ytan hos t ex en slinga med 30 meters omkrets sträcker sig då ca-2 m '
utanför slingans långsida och 0,5 m utanför slingans kortsida. Den
största känsligheten för fordon erhålls då slingans bredd är ca 2 m.
För attundvika störningar mellan detektorer bör slingorna placeras
på ett aVStånd av minst 2,5 m från varandra. Om detta ej går, t ex då två passagedetektorer skall bilda en riktningskännande detektor,e
kan störningarna minskas genom att den ena slingan läggs i form av en 8.
Se broschyr MI/B B 1604.
.
'
'
Slingansvmatningskabel.
I direkt anslutning till slingan finns en kondensator, som tillsammans
med slingan bildar en avstämningskrets. Denna avstämningskrets på»
verkas ej av längden hos matningskabeln. Fördelan med detta är att
känsligheten hos detektorn endast påverkas av matningskabelns dämpning,
Vilket gör att man kan-tillåta en längd på matningskabeln på upp till
500 m. ' V
Eftersom matningskablarna till olika detekterar är skärmade, kan man
lägga flera matningskablar intill varandra utan att de stör varandra;
För att detekterar i samma skåp inte skall störa varandra skall
för-. bindelserna i skåpet mellan slingans kopplingsplint och förstärkare
vara tvinnade. ' '
Vid trimning av JOD 12 är det viktigt att trimningsföreskrifterna följs
»? noggrannt; .Känsligheten hos JCD 12 ökar med temperaturen. Är detektorn felaktigt trimmad kan ett falskt närvarobesked .erhållas vid en hög
omgivningstemperatur eller också kan ett'önskst närvarobesked utebli
?_vid_låg omgivningstemperatur.
JCD 13 och JCD 16:e känslighet påverkas mycket litet av temperaturu
VäXlingar. Vid kontroll av JCD 13 och JCD 16 behöver därför ingen
omtrimning göras, om'visarutslaget på triminstrumentet ej avviker mer
. än'20% från föreSkrivet värde. JCD 12 och JCD 13 bör funktionskontrolw
leras en.gång varje halvår och JCD 16 en gång per år. I samuand med
denna_kontroll görs eventuell omtrimnåpg.
* Detektor'JCD 17.
Vid trimning av JCD 17 ansluts en voltmeter (lämpligen ett universalm
instrument) på detektorkortets front. För trimningen krävs följaktu
'ligen'inget trimkort eller trimningsinstrument. Som hos JCD 13 och
JCD 16 gäller att detektorns känslighet påverkas mycket litet av . temçersturväxlingsr och att justering av visarutslaget skall göras'
först då det avviker mer än 20% från föreskrivet_värde. '
LM ERICSSONS GÄNGDETEIQORER V
Av gångdetektorer finns tre typer, nämligen JCK 1005, JCK 1006 och
JCK 1007. JCK 1006 är försedd med akustisk gångsignal. JCK 1007
är endast en akustisk enhet i bostom används för t ex tidstyrda
Signalanläggningar (Se broschyr ML/B A 1579).
DETEETOREENAS ANVÄNDNINGSOáRÃDEN
För detektering av fordosstrsfik används t ex detekterar JCD 12
' Voch JCB 13« För detektering av fotgängare används en gångdetektor
-t esgnuç1su som.m0nteras_på signslstolpe. V . _ _ . 0 A
"Symboler: « 4 .f ,j . _ detektor.för fordon
riktningSkännsnde dito"
E
Fä ' detektor för fotgängsre
mål
anmäla ett fordons ankomst så tidigt som möjligt Och önskemålet ett
förlänga pågående gröntid så sent som möjligt. Det senare för att
den erforderliga marginalen, inte skall bli så stor att den störgtrs-A
fikrytmen. En Vägning av dessa önskemål mot varandra ger att sve
ståndet mellan detektor och stopplinje bör vara 30 till 50 meter. Utferter eller andra omständigheter kan dock motivera en placering
närmare stoppgränsen. I Vissa fall erfordras två detektorer, en på
normalt avstånd från stoppgränsen och en så långt fram som utfarter
kräver (se fig 9).
När man vill ha en riktningskännende detektering av fordon erfordras
två detektorslingor. De läggs med ett avstånd av 1,0w1,5 m från varandra i körriktningen räknat. Vid enbart cykeldetektering bör avståndet mellan
slingorna vara 0,5 meter (Se broschyr Ml/B B 1604). *En utrustning i styr»
apparaten'svarar för att endast fordon i den ena körriktningen indikeras. Önskar man avkänna beläggningen av större ytá (t ex 2 x 30 m) skall
de-tektor JCD 16 eller JCD 17 användas. Dede-tektorer för evkänning av be_
läggning placeras normalt i anslutning till stöpplinjen,
Förutom att man kan använda JCD 16 och JCD 17 för att initiera eftergrön
fas kan den användas som "long»loöp"mdetektor. Detektorslingan läggs då
i körfältet .framför signalen, så att den täcker en yta på t ex 2Xå0 m. Ett fordon Som har kommit in över detektorslingan kommer således att vara detekterat tills det har passerat signalen (Se fig 10).
Detektorer för programval.
Trafikstyrt pregrsmval i samordnade system bygger på informationer
från-detektorer som-placerats så att man får informationer om de
Viktigaste trafikströmmarna. Vilka trafikströmmsr som kan anses
vara Viktiga för programvalet varierar från fall till fall, men som regel vill.man undersöka stora traiiketrömmar och de mest verie« rande trafikströmmerna. 'På infartsvägar med starkt riktningsbetonad
morgon» och'kvällstrafik kan in» och utgående trafik vara både den
största och mest varierande. '
Detektorer för progremval bör förläggas så att en kö före röd signal
inte når detektorn. Detta innebär att de detektorer som används för,
lokal trafikstyrning inte är lämpliga att samtidigt användas som
programväljande detektorer. Om möjligt förläggs programväljande_
detektorer ca 200 m före stoppgränsen. '1 '
Ken programväljande detektor inte förläggas på tillräckligt långt
'åvstånd från steppgränsen, bör närvarodetektor.JCD 12 och 16 en;
vändas. Blir den belagd av en'kö5 avges en impuls som kvarstår
tills fordonen_lämnar detektorn. 'I programvåljaren-kan denna
långa impuls uppdelas i många_korta impulser. Verkan blir alltså
densamma vid kö som vid högtrafik, d v 5 ett för trafikströmmen
lämpligt program_inkopplas. _ s
-l större samordnande system där man använder en dator som
styr-central kan_msn ta hand om mer trafikinformation än med en
normal reläcentral. En väsentlig parameter år trafikströmmens
hastighet. Ett sätt att mäta hastighet år att använda två
JCD 13 vars slingor placeras på ett visst avstånd från varandra
i ett körfält. Tiden mellan de två pulser ett fordon ger och av; ståndet mellan Slingorna ger ett mått på fordonets hastighet. i Ett annat sätt att mäta hastighet är att använda en JCD 16 med
en slinga på t ex 2 X 5-meter. Ett fordon som passerar slingan
ger en impuls med en viss längd. Hastigheten hos fordonet är omvänt
preportionell mot pulslängden, Om man bortser från fordonets.längd. Oavsett mätmetod bör ett.medelvärde beräknas av ett antal hastighetsw
mätningar. i . ' ' '
Ovriga användningsområden.
För detektorerna finns många andra användningsområden. De används
för evkänning av fordon i parkeringsanläggningar, vid lestkajer m.m. Vid lämpligt val av slingstorlek kan detektorerna användas för de-tektering av betydligt mindre föremål än bilar.
. h V
' m3
.M7
0
,
-
Ä
:Lili
Fagdêiêkåør
I
I A 75
brå/52%?
v.:
Phsm mm* . v2:
låg-01:37'
,
'
' map a'nêsr dåfåCfÖ/n ' 49531639' I H U Oscillaiar' : Oscil/äfor -- 55.5 1 Blackscm för 395 ' 5;? $^ 'ii'âwt fel'MI/Bt B 3210/2879
min
.- Law! .
'gå a: , .
*5
Lon _ ._ u v
"
;çgêgággg
, A/égâlâ'
m7 '
'
'
' äga??-
v V _ - .. . _ ,
m... ' 5A!! Fc?ggløféåå'llâf V - ' * A 'få få. _ . Dr/'VSáeg 5:' I pñLå: (gift. .: Uêjá'mñâ'fê f; Kökstärásare 3: Relä
l V
Loqøcüüer
ogäüd5r A
. Egyaükår A
;anpüf@r
'
_Reáwy
l _'Oaáäaáw' ' s OmáWbåW'
Eii+
:15 ?21%5
- U . . W . . namn-Id' .:2:132
Blocksehexâa för JOE 13 Blêck 'diägam far JCB 15':aa/Bas B 3210/2879
MI/Bt' B 3210/2879
-A
'f
3
c'
«* '. ' ^ \ . 'i . i 4 ' ' < ; . J L . \ . .\ I , L »1 1 Y Z . \ '. . r i _ « .. . 4 V. , . V 3 1; 'v ^A '. u ,. ' ' _
l
?a
st
väg
g
'
(A
na
lo
g
uág
ån
g)
3
.7
2:3
5?
fa
rm
/n
a!
_
(Än
gl
ag
auf
/D
ot
)
i!
:2
13
14
15
15
:7
rr
.12
:3
JU
N
Si
f/
?g
a
Lo
ap
14
/3
,1
4/
4
Ål
?
_
_
co
m
.
.
_
4
;
-'
An
_
'
-.
A
<
A.
1:5
Dr
iwf
eg
Fa
sa
fêm
kwr
För
säák
ka
m
?sås
/á'
Lo
ap
:M
s/
er
Ph
am
<
An
vp
li
üi
er
äg
g/
ag
sh
if
t
de
!?
er
'
1
H
/
,
°
*
w
_
Aut
om
af
/äk
Os
ti
/l
äk
t'
I
fus
ka
/r
im
!!
*
,
'
Us
a/
Yl
aáa
r'
.
4
I
'
Auf
om
af
/b
I
9
' ph as e m a k a ! "\C
// ('1
5
?
BO
A
2/
3s
ia
/I
,M
M
2:
3a
rg
/2
'
F1
5
3
Bl ec ka eh gma för -J CB 16 Bl ack ái ag ra m fo r JC B 16A 02 5 åä? ?
M
ks fuf fog 69 00 /9 5] utgån g) ,4 02 % ' .# 36 92 6 Åäåé Eázl äé.D
r/
'V
-st
å-eg
F 0 5 -defe kt er
ag
e/
Y/
af
ar
4
Utgå/ .g gde
i.
2
.
Sp
å?
får
Uf
gån
g
0/1
.M
ZM
-,Sp
afh
-72
9:;
uf
gån
g
622
24.
!
kävm
hg
uf
gr
åm
g
:få 02 3:fe
gt
uz'
fa
g
(A
na
/a
guz'
gån
g)
B 52 6.S
i/
'n
ga
2
.
§0 2? 'II-H
%2%
Fém
äáf
-Ut
gån
g?
Uf
gån
gg
gá
kär
e
'
Å
lo
g/
'k
w
'
'
[gg
/7:
Fái
sáá'
r-F0
5
-dâf
âk
fa
r
4 . v*(5
Jaag*'l
Å . ' g i
m/Bt B 3210/28??
fåwøm
aá
4
-.s
må
2
W
Må
Rås
pl
eår
ä"
''
ka
n?
mf
l
ååh
mh
g
Ayäo ma å. /f âe W I n g'Lag
/'l
rf
år
råd
/?
Mys
-kän
ni
ng
E
17
/n
di
lâ'
er
/h
g
:s 5, . /n ál ø' zefo
gå
åác
fl
z
56 :? ? äüäâ Fi g 4 B l o c k s c h em för 50 .? ) 17Os
çi
ll
lüz'
or
__
__
__
__
\4
00
/
+
5
V
..
.
'
A0
03
Sp
am
/äg
s*
+2
w
re
gl
er
/?
'7
9
;A
lm
a/
V»r
a/
23
"
0a
/
V Ingå/79, ans/ufên till. 6/3 på ROA 213 510/I
- Input, conneczçed #0 6/3 on RCA 213 8/0/I
»4/2
%
>
3
Å H
> v 9 . & Afämüáäøwaøe . '
V lnaüléer/ng
_
gås/á'
. . O . .-
Level
_
[nd/6624:0!?
åêlay
CWwüf'üiáOl'
-W;
It'll/å»
"
.Stärk/'ds -
.
' _
, cm»
?lisää/lm?? ' ' V ' 5 V DC I 2%* V üCLem!
'
_
Sååå. Circuit*
-
C få
--
aajhåfmenf
51% DC
Pig 5
,
Blackgchm fö? ködetektar,
Black diagramfor queue date-eur
ämm
äänm
åh:
wwwm
.
§qu
3x
N.
å
å
?m
So
å»2
åcnuwk
küm
üw.
wtüüf
cmw
kwi
ämm
Qmm
wümum
uaöm
ââtö
maa
kwwuåt
mmêt
åuG
W
w
.av
m
se
_
.å
??
xän
kmn
wtom
küxxn
_
å«
Ewm
xâmm
måxå
ut!? 3ha .,m e .a A,A ..Rllê/n/'rzgskáhnon de defekta'
11
L 2 5 Qvs: 5 Närvaro defekfar' W i l /,a-/.5rn 0, 50 7 h .%
\ 0: 42 17 7 b . Passage Nån/oro Sl'no 'gp L 3 .9 L 1 510799 / I /,10 -Bygga-gm =Önskas /hvpu/s'er ena/as! från bilar' NN
( n u: --n-- /3 /,/0 2 -II- /2 1.» 1,10 6 8
(69995 slinga/7 /' 90' vinkel mof kö'rr/ktmhgen. -- u - / 4 [Ja _
Önskas även impulser' från cyklar' __. n_ /0 ,Ja '-'
"-'
Cyk
el
ba
na
läggas :lingen /' 45 °tlå°rlhke1maf-káTr/X'fn/hgen . __ u _ /6 ,2 i' ,0 __ __
/Vá%yorodetekior -' ._.._/7 3 1,10 -
--Närvarodetektorn bör' gälla ena/as! får
-u--/8 5 1.10- 2 4
\.
ett kär-få . ' E: MI/Bt B 3210/28794SP ÅNGA VÄa EN Detektof' få? nlá'ufruatai/?gen
:n ammo» *är
elsktMn/kulmtmhgaFig. '10
MI/Bt B 3210/2879
Detektor JCD 12, 13 och 16 'ar-avsedda att detekte-ra fordon, men .kan (även användas för detektering av andra föremål som innehåller metall.
Detekto-rerna är av induktiv typ och består av två delar, _ detektorkort 00h Slinga. Slingan är genom sin för-läggning under vägbanan väl _skyddad mot åverkan 4.
Detektorn avkånner den induktansändring i slingan
som orsakas av t ex ettfordøn.
Detektorerna som har en arbetsfrekvens på ca
125 kHz är transistoriserade och består av
disk-reta komponenter och integrerade kretsar. För detektorns utbesked finns ett relä med en sluta-nde'
* kontakt Komponenterna är monterade på en platta med etsad' folieförbindning. (se fig. 1) Krets-kortet som är av instickstyp sätts inien
styrappa-rat eller i en särskild .detekterbom '
-Detektorslinga JOD 101 består av plastisolerad
slingtråd, anpassningsenhet och 15 m
matnings-kabel. Detektorslinga JOD 102 levereras utan
slingtråd. Matningskabeln mellan slinga och
detek-'torkort kan förlängas upp till 500 m.
detektorn kvarstår sålänge ett fordOn befinner
sig över slingan. '
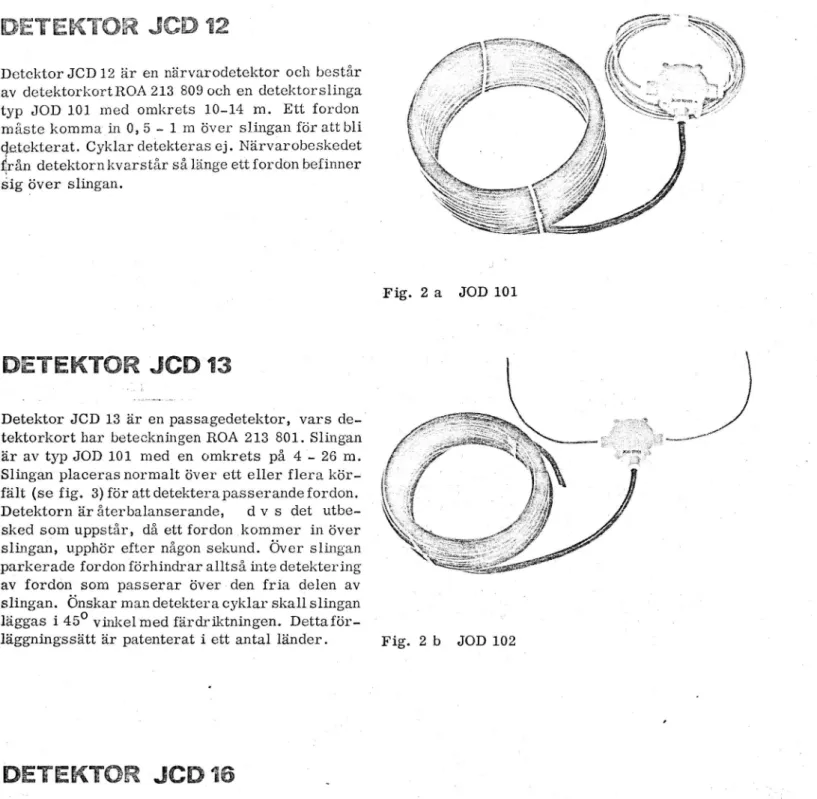
steam .some
Detektor JCD 13 är en passagedetektor, vars de; tektorkort har beteckningen ROA 213 801. Slingan är av typ JOD 101 med en omkrets på 4 - 26 m. Slingan placeras normalt över ett eller flera kör-fält (se fig. 3) för att detektera passerande fordon. Detektorn är återbalanserande, d v 3 det utbe_ sked som uppstår, då ett fordon kommer in över slingan, upphör efter någOn sekund. Över slingan
parkerade fordon förhindrar alltså inte detektering
av fordOn som passerar över ?den fria delen av slingan. Önskar man detektera cyklar skall slingan
läggas i 450 vinkelmed färdriktningen. Detta för_
läggningssätt är patenterat i ett antal länder.
oerskree .ice *te
-Detektor JCD 16 finns itvåütförandendels en
när'-varotyp med detektorkort ROA 213 810/ 1 och dels en passagetyp med detektorkort ROA 213 810/ 2.
Till detektorkortet ansluts slinga typ JOD 101 med en omkretspå 4 - 26 m eller slinga typ JOD 102
med en omkrets på 20 - 110 m. I vissafallkan två
slingor av typ JOD 101 eller JOD 102 anslutas .till
samma detektorkort. '
Närvarodetektorn JCD 16 ger ett varaktigt
utbe-Slied när ett fordon befinner sig över slingan. Efter
en viss tid balanseras dock beskedet ut. Utbalan-seringstiden är främst beroende av förhållandet mellan totala detekteringsytan och den-del som
täcks av ett fordon. Även avståndet mellan slinga
och fordon ih'o'jdled påverkar utbalanseringstide . Som exempel kan nämnas att en personbil som place fas över en slinga på' 2 x 4-0 ni blir utbalan» serad efter ca 10 minuter.
9.
Fig. 2 a JOD 101
Fig. 2 b JOD 102
Passagedetektorn JCD 16 ger ett kortvarigt utbe-a ' sked då ett fordon kommer in över slingan. Sedan
pulsen upphört kan ytterligare fordOn detekteras
även om det första fordonet fortfarande befinner
sigöver slingan. Vid cykeldetektering skall slingan
läggas i- 450 vinkel med färdriktningen.
Detekteringen av ett fordon påbörjas redan då det
befinner sig strax utanför slingtråden. Avståndet
är beroende av storleken hos slinga resp. fordon.
Med ett enkelt ingrepp kan känslighetenhos JCD 16 ökas. I normalutförandet år känsligheten till... räcklig för de flesta tänkbara användningsområden samtidigt som detektorn är mycket resistent mot
' JOD 102 (fig. 2b) används företrädesvis för
när-varodetektering. JOD 102 (se tabell 2) är avsedd för' större slingor ooh gjord för anslutning av en plastisolerad koppartråd av erforderlig
(Tråden ingår inte)
Till Slingorna hör också en skärmad
anslutnings-,kabel på ca 15 m. Denna. kabel kan förlängas upp
till 500 m.
'
: \::\*:ik:an vx: .hgsrtibø.'-,;.".-;r ::râ ,,._53:." I. ä_ 9 w» - °\ 7,; 6 P' , ' . I ' i - i l 1 _. , \ _ ' i 'Ä \_ . 4 7 f -1 _ * ' '5 K? . . A _ , ,vrf , ,.... . \ ,M ,k \...JM. \'1" x'**#"av 1* ,24W*"N :lr-*new 4 få 2; riffsi . 0Fig. 3 Nedläggning av detektorslinga.
längd.
JOD' 10102
'
10, 5
JOD 10103
14, 5
JOD 10104
18, 5
JOD 10105
22, 5
JOD 10106 ;
26, 5
JOD 10107" '
8, 5
JOD 10108
12, 5
Tabell 1
Typbeteckning För omkrets på slinga
JOD 10201
28 m' .. 44 m
JOD 10202
40 m _ 64 m
JOD 10203
60 m .. 88
JOD 10204
80 m -110m
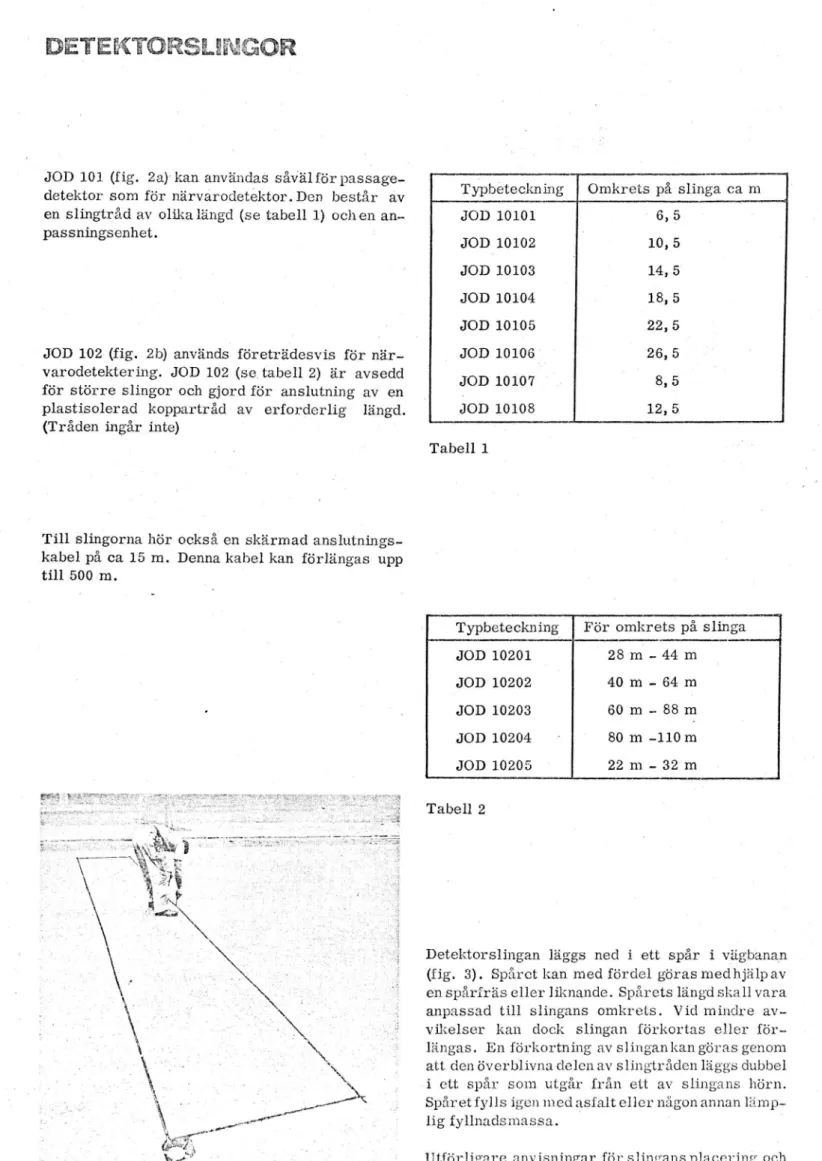
JOD 10205 22 m - 32 m Tabell 2Detektorslingan läggs ned i ett spår i vägbanan (fig. 3). Spåret kan med fördel göras medhjälp av
en spårfr'a's eller liknande. Spårets längd skall vara
anpassad till slingans omkrets. Vid mindre av_ vikelser kan dock slingan förkortas eller för-a längas. En förkortning av slingankan.göras genom att den överblivna delen av slingtråden läggs dubbel i ett spår som utgår från ett av slingans hörn. Spåret fylls igen med asfalt eller någon annan Iam p..., lig fyllnadsmassa. '
Utförligare anvisningar för slingansplaeering och läggning finns i broschyr Detektorslingor JOD 101 och JOD 102".