Om kantbuckling av pappersbanan vid pappersproduktion
97
0
0
Full text
(2)
(3) Förord Arbetet med föreliggande licentiat avhandling har utförts vid Malmö högskola där professor Per Ståhle varit min tålmodige handledare och mentor, alltid varit vänlig, tillmötesgående och hjälpsam samt tillfört många trevliga stunder och intressanta diskussioner kring allehanda ämnen, inklusive deformationen av papper. Förhoppningsvis fortsätter vårt samarbete i samma goda anda, stort tack Per. Christina Bjerkén kom till gruppen i slutet av det här arbetet men har ändå med energi och ambition korrekturläst avhandlingen och lämnat värdefulla synpunkter som jag mottagit tacksamt. Vidare vill jag tacka Nazem Kadhem som med tålamod och ödmjukhet har assisterat vid materialproven och insamling av provdata. Jag vill också tacka Jakob Knudsen och Andrey Jivkov som har bidragit med livlig atmosfär, livlig i absolut positiv bemärkelse. Jag tackar också T2F och dess VD Per Jonsson som finansierat projektet och därmed gjort detta arbete möjligt samt professor Sören Östlund som i allra högsta grad varit delaktig i egenskap av koordinator. Slutligen vill jag tacka min familj som jag älskar högt. Jag tackar min fru och livskamrat Kicki som i många avseenden bidragit till att detta arbete blivit möjligt. Ett mycket stort tack. Slutligen kan jag inte nog tacka mina barn Vilma 5 år och Harald 8 år, som under tiden för detta arbete varit mer tålmodigt än vad man någonsin kan förvänta sig av barn i deras ålder. Ni är världens bästa ungar, jag är mycket stolt över er och jag hoppas att jag inte försummat er alltför mycket. Nu är jag färdig och nu firar vi jul! Lund 20 december 2004 Jiri Havir. i.
(4) ii.
(5) Abstract Web wrinkling is one of the more common web handling problems, caused by shear forces, resulting from in-plane misaligned rollers. Several analytical models have been derived, mainly based on the theory of beams or membranes and isotropic material properties. Paper is a highly anisotropic material but can be assumed orthotropic for thin structures as paper web. For this reason, an orthotropic plane stress model based on the von Kármán theory of plates have been derived. Further, an investigation has been performed on the mechanics that is the origin of the shear forces due to misaligned rollers. It is believed that the differential equation proposed by von Kármán does not have a simple solution in closed form for the proposed problem. Therefore, energy methods and double Fourier series are used to calculate the critical load by solving the corresponding eigenvalue problem. It is then shown that the use of an isotropic material model to estimate the critical load could be as much as thirty percent wrong. Thus, it is concluded that orthotropy should not be neglected in the analysis of buckling of paper webs. The shear force causes the web to deflect from its original path in the machine direction according to the normal entry law. Thus, the web tension becomes non-uniform and the stresses are redistributed so that only a small part of the web caries the load. The highest stresses are then found near the load carrying edge. Because high stresses causes permanent deformation, it has been assumed that misalignment causes the characteristic waviness that often can be seen on paper web edges in manufacturing plants. In this licentiate thesis, a model has been derived that is based upon difference in material properties across machine direction. The model shows that above mentioned waviness, not necessarily is caused by misaligned rollers, but may very well be the result of the differences in material properties, such as yield strength and Young’s modulus.. iii.
(6) iv.
(7) INNEHÅLLSFÖRTECKNING. sida. 1 Introduktion. 1. 2 Härledning av von Kármáns plattekvation 2.1 Definition av spänningskomponenter 2.2 Jämviktsamband 2.3 Definition av töjningar 2.4 Konstitutiva ekvationer 2.5 Analytisk modell för belastning av plattor 2.5.1 Jämvikt 2.5.2 Deformation 2.5.3 Konstitutiva ekvationer 2.5.4 Randvillkor 2.5.5 Kirchhoffs plattekvation 2.5.6 von Kármáns plattekvation. 4 4 5 10 16 22 23 26 27 27 30 32. 3 Yttre laster på en pappersbana 3.1 Tvärkraftens uppkomst 3.2 Normalvillkoret 3.3 Tryckspänningar på grund av tvärkraft 3.4 Totala yttre lasten. 38 38 40 42 43. 4 Buckling av papper mellan felställd valspar 4.1 Beräkning med von Kármáns plattekvation 4.2 Val av förskjutningsansats 4.3 Beräkning med energimetod 4.4 Slutsats. 45 45 47 48 59. 5 Materialprovning 5.1 Provstavars utformning 5.2 Storleksberoende materialtester. 60 61 62. 6 Långa kanter 6.1 Analytisk modell 6.2 Dragprov 6.2.1 Utrustning 6.2.2 Genomförande 2.5.3 Resultat 6.3 Fiberorientering 6.3.1 Utrustning 6.3.2 Genomförande 6.3.3 Resultat 6.4 Slutsats. 65 66 70 70 72 73 76 76 76 78 79. 7 Slutsatser. 81. Bilagor. 82. v.
(8) vi.
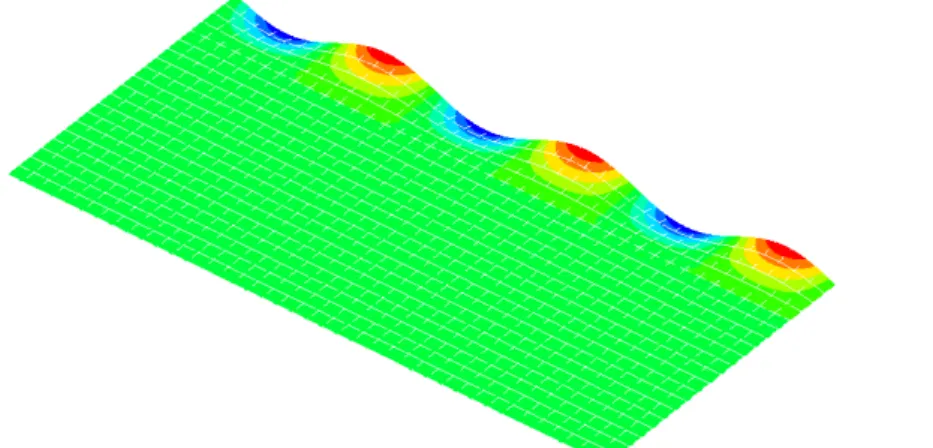
(9) 1. Introduktion Vid transport av papper i en pappersbana, så som sker vid tillverkning av papperet respektive vid tryckning, är det önskvärt att minimera antal banbrott eftersom dessa leder till kostsamma produktionsavbrott. Analys av banbelastningen görs i dag normalt endast i samband med forskning. Vanligen görs analyserna antingen med finita elementmetoden och/eller med enkla beräkningsmodeller. Ofta baseras dessa enkla modeller på membrantillstånd eller enaxlig balkteori vilket inte alltid ger en bra förklaring till de verkliga orsakerna. Papper är ett inhomogent material med naturliga materialvariationer och defekter vid vilka det uppstår höga materialpåkänningar. Det förekommer också belastningsvariationer i pappersbanan vilket medför att banspänningen lokalt ökar. Belastningsvariationer uppstår p.g.a. papperets växelverkan med omgivningen, t.ex. i form av luftmotstånd och friktion, momentan ändring i banhastighet eller som påtvingad deformation p.g.a. felställda valsar, m.m. Brott i pappersbanan eller i en rulltryckpress uppkommer då påkänningen på materialet, någonstans i banan, överskrider ett för materialet karakteristiskt värde. Papper är att betrakta som en membranliknande struktur därför att dess tjocklek är avsevärt mycket mindre än dess utsträckning i planet. Papper sägs vara styvt för belastningar i papperets plan och vekt i riktningen vinkelrätt mot detta plan. Detta medför bl.a. att papper svårligen deformeras i planet men kan lätt rullas ihop utan att stora spänningar uppstår. En konsekvens av detta visas som papperets oförmåga att bära trycklaster i planet. Vid tryckbelastning bucklar papper lätt ut ur planet vilket kan orsaka problem dels genom att belastningen omlagras, dels genom att veck kan uppstå. En pappersbana som tvingas att löpa mellan två felställda valsar utsätts för en belastning med åtföljande deformation i planet såsom visas i figur 1.1. Papperet spänns ut på den dragna sidan och bucklas på den hoptryckta sidan. Konsekvensen blir att banspänningen, som är tänkt att fördelas jämnt över hela pappersbanans bredd, endast bärs upp av en mindre andel av hela banans bredd. Storleken på den lastbärande delen av pappersbanan beror på lastens sammansättning och valsarnas snedställning relativt varandra.. -nxy. -nxy. nx. nx. Figur 1.1. Bilderna visar resultatet av en finita element beräkning, gjord på en modell av en pappersbana mellan två felställda valsar, varvid papperet belastas med både draglast nx i maskinriktningen och skjuvlast nxy tvärs maskinriktningen. Den vänstra bilden visar deformationen och den högra bilden visar banspänningen nx vid deformationen. I översta hörnet råder maximala dragspänningar, vilka är ca 3.5 ggr högre än minsta tryckspänningar i modellens vänstra hörn.. 1.
(10) Uppkomsten av vågformig utböjning, tvärs papperets plan i pappersbanor under statisk delvis skjuvande belastning, har tidigare undersökts med avseende på betydelsen av papprets böjstyvhet av Good, Kedl, Shelton och Gehlbach [1, 2]. Med platteori och kännedom om antal bucklor, halva våglängder tvärs pappersbanan, beräknades den kritiska tryckspänningen. Denna ansattes därefter som en av två rådande huvudspänningar varmed den kritiska skjuvspänningen kunde beräknas. Med denna och enaxlig balkteori beräknades slutligen vinkeln för den felställda valsen. Finita element beräkningar med avsikten att studera skjuvdeformationens form, har tidigare genomförts med både membran- och plattelement av Gopal och Kedl [3] samt Benson, Chiu, La Fleche och Stack [4]. Ickelinjära beräkningar med finita element har gjorts av Kobayaschi [5] varvid avsikten varit att förutsäga pappersbanans buckling till följd av skjuvbelastning samt att studera olika materialparametrars inverkan och randvillkor. Konsekvensen av felställda valsar är att skjuvbelastning uppstår tvärs banan varvid pappersbanan förskjuts i sidled. I ytterkanterna uppstår då höga spänningsnivåer vilka antas överstiga materialets sträckgräns varvid papperet i dessa områden plasticerar. Dessa områden får permanenta deformationer vilka medför att ytterkanterna efter avlastning blir något längre än papperets övriga delar. Konsekvensen blir att papperet, för att uppnå jämvikt, bucklas längs ytterkanterna så som åskådliggörs i figur 1.2 och s.k. långa kanter uppstår. Dessa är ofta synliga då papperet avlastats i samband med avrullning efter tillverkning.. Figur 1.2. Bilden åskådliggör ett obelastat ark vars övre kant bucklar i längdriktningen till följd av en permanent deformation som medfört en ökning av ytterkantens längd. Denna s.k. lång kant antas uppstå då sträckgränsen för papperet överskridits längs kanten till följd av en för hög belastning.. Till följd av tillverkningsprocessen erhåller det maskintillverkade papperet både anisotropa och inhomogena materialegenskaper. Detta medför bl.a. att olika värden på elasticitetsmodulen, sträckgränsen och brottgränsen i maskinriktningen (MD) erhålls, då dessa mäts längs pappersbanans bredd. Enligt Niskanen [7] och Parola m.fl. [8] fås lägst värden vid ytterkanterna. Orsaken till de mot kanterna avtagande värden tillskrivs normalt torkprocessen, varvid papperet närmast kanterna torkar fritt medan det i mitten av banan torkar inspänt. Fellers och Norman [1] påstår dock att papperets samtliga fysikaliska egenskaper påverkas av fiberorienteringen. Påståendet är högst troligt, eftersom fibrerna utgör det huvudsakliga konstruktionselementet i det fibernätverk som utgör papperets lastbärande struktur. Det kan därför inte uteslutas att orsaken till de mot kanterna avtagande materialegenskaperna primärt beror på skillnaden i fibrernas orientering. 2.
(11) I den föreliggande licentiatavhandlingen har en analytisk modell för ingenjörsmässig behandling av papperets buckling tagits fram. Modellen baseras på von Kármáns platteori [6] i vilken papperets ortotropa materialegenskaper inkluderats. Beräkning med den framtagna modellen visar att buckling initieras avsevärt tidigare än om en isotrop beräkningsmodell används. Vidare redovisas en studie avseende papperets mekaniska materialegenskaper under rådande fördelning av fibrernas orienteringsriktning. Denna visar att uppkomsten av långa kanter, speciellt i samband med papperets tillverkning, snarare kan bero på papperets inhomogena materialegenskaper än på grund av felställda valsar. I kap. 2 härleds von Kármáns plattekvation och riktar sig främst till den som ej är bekant med denna teori sedan tidigare. I kapitlet gås igenom grundläggande definitioner avseende spänningar, jämvikt, deformation och töjningar samt konstitutiva samband, etc. I kap. 3 redogörs för rådande belastning på pappersbanan, normalvillkoret samt skjuvlastens uppkomst, som beror på valsens snedställning och rådande friktion mellan papperet och valsen. I kap. 4 visas att plattekvation för det uppställda problemet sannolikt inte leder till en lösning på sluten form. Den kritiska lasten och deformationens form, ej storlek, kan dock beräknas med hjälp av energibetraktelse. Energiekvationen härleds för problemet vilket slutligen resulterar i ett egenvärdesproblem, vars lösning primärt ger den kritiska lasten. I kap. 5 diskuteras provbitars form och storlek i samband med dragprov, och sätts i relation till nu rådande standard inom pappersindustrin. I kap. 6 redovisas studien av papperets fiberorientering och resultat av dragprov som gjorts på vanligt kopieringspapper. Avsikten med dessa prov är att studera skillnaden i både fibrernas fördelning och papperets materialegenskaper. Dessa båda skiljer sig något vid kanten mot vad som är fallet längre in mot pappersbanans mitt. Vidare tas fram en analytisk modell för kvantitativ bedömning av långa kanters uppkomst, till följd av varierande elasticitetsmodul och sträckgräns, gränsen för begynnande permanent deformation.. Referenser 1. Good, J. K., Kedl, D. M. & Shelton, J. J. (1997, June 1-4). Shear Wrinkling in Isolated Spans. Proceedings of the Fourth International Conference on Web Handling. Web Handling Research Center, Oklahoma State University, Stillwater, OK. 2. Gehlbach, L. S., & Kedl, D. M. (1989, August). Predicting shear wrinkles in web spans. Tappi Journal, pp. 129-134. 3. Gopal, H., & Kedl, D. M. (1991, May 19-22). Using Finite Element Model to Define how Wrinkles Form in a single Web Span without Moment Transfer. Proceedings of the First International Conference on Web Handling. Web Handling Research Center, Oklahoma State University, Stillwater, OK. 4. Benson, R. C., Chiu, H. C., LaFleche, J., & Stack, K. D. (1993, June 1-4). Simulation of Wrinkling Patterns in Webs due to Non-uniform Transport Conditions. Proceedings of the Second International Web Handling Conference.University of Rochester, Rochester New York. 5. Kobayaschi, T. (1999). Simulation of Mechanical Wrinkling in Web Span. TAAPPI International Paper Physics Conference. 6. Fung, Y. C. (1965). Foundations of Solid Mechanics. Prentice-Hall, Englewood Cliffs, New Jersey. 7. Niskanen, K. (1998). Paper Physics (Papermaking Science and Technology, 16). Helsingfors: Fapet Oy. 8. Parola, M., Vuorinen, S., Linna, H., Kaljunen, T., & Beletski, N. (2001). Modelling the web tension profile in a paper machine. VTT Information Technology, Media, Espoo, Finland. http://www.vtt.fi/tte/informationcarriers/publications/ 9. Fellers, C., & Norman, B. (1998). Pappersteknik (3:e uppl). Stockholm: Kungliga Tekniska Högskolan, Inst. För pappersteknik.. 3.
(12) 2 Härledning av von Kármáns plattekvation Den modell för buckling av plattor, som här presenteras baseras på definitioner och samband med utgångspunkt i en kontinuummekanisk modell för spänningstillståndet i ett material. Ett kontinuum kännetecknas av att materialet överallt är kontinuerligt fördelat, vilket bl.a. innebär att den atomära strukturen försummas. Vidare antaganden om materialets egenskaper, mekanisk jämvikt och deformation leder till Kirchhoffs plattekvation gällande vid små deformationer. Denna utvecklas vidare enligt von Kármáns teori, vilket resulterar i ekvationer tillämpliga vid buckling av plattor.. 2.1 Definition av spänningskomponenter. Figur 2.1a visar en schematisk bild av en kropp som är fäst till omgivningen via två stöd samt belastad med yttre laster, t.ex. krafter och moment. De yttre lasterna fördelas i materialet och verkar där som inre laster i varje punkt och benämnes spänningar i materialet. Ett ur materialet tänkt utskuret element, med längden ∆x, bredden ∆y och tjockleken ∆z, belastas således med normalspänningar (σij) vilka verkar i snittytornas normalriktning, samt skjuvspänningar (τij) vilka verkar parallellt med respektive snittyta. a). F2. b). ∆V=∆x∆y∆z. dAz=dxdy F1. M3 p1. p3 F3. z x. y. τxz τzx. M1. z. x. σzz. p2 M2. y σxx ∆y. ∆V= ∆x∆y∆z. dAx=dydz. τxy. τzy. τyz τxy. σyy. ∆z. ∆x dAy=dxdz. Figur 2.1 a) Schematisk bild av en kropp som belastats med yttre krafter (Fi) och moment (Mi). De yttre lasterna tas upp av kroppen och verkar där som s.k. spänningar. b) En tänkt utskuren del belastas längs snittytorna med spänningarna vars riktningar definieras av det valda koordinatsystemet.. Riktningarna anges med hjälp av index vilka definieras av det valda koordinatsystemets riktningar. Spänningarnas första index definieras av normalriktningen för ytan som spänningen verkar på. Det andra indexet anger komponentens riktning i det valda koordinatsystemet, se figur 2.1b. På ytor vars normalriktning pekar i positiv koordinatriktning pekar spänningarna i positiv koordinatriktning. Motsatsen gäller på ytor med negativ normalriktning, se figur 2.2. Definitionens upphov är Newtons 3:e lag om verkan och motverkan, vilket innebär att laster i ett snitt är lika stora och motriktade varandra.. 4.
(13) Spänningarnas storlek varierar vanligtvis från en punkt till en annan i materialet. Skillnaderna uppstår dels på grund av yttre belastningens variation längs kroppen, dels på grund av variation i kroppens geometri. Spänningarna definieras som kraft per yta och anges i N/mm², ekvivalent med MPa, eller Psi. Spänningstillståndet i en materiel punkt kan beskrivas fullständigt med hjälp av spänningsmatrisen S, som definieras av 3×3- matrisen här nedan.. éσ xx ê S = ê τ yx ê τ zx ë. τ xy σ yy τ zy. τ xz ù ú τ yz ú σ zz úû. (2.1). Spänningskomponenternas position i matrisen definieras av respektive ytors normerade normalvektor n. Exempelvis erhålls spänningskomponenter på ytan vars normalriktning ges av basvektorn ex i x-led som spänningsvektorn sx = σxx ex+ τxy ey+ τxz ez definierad här nedan, där ST är transponatet av S-matrisen, se figur 2.1b.. s x = ST e x. æ σ xx ö éσ xx ç ÷ ê ⇔ ç τ xy ÷ = ê τ xy ç τ ÷ êτ è xz ø ë xz. τ yx σ yy τ yz. τ zx ùæ 1 ö úç ÷ τ zy úç 0 ÷ σ zz úûçè 0 ÷ø. (2.2). Spänningsvektorn s = sx ex+sy ey+sz ez på en godtycklig snittyta definieras på motsvarande sätt genom s = ST n. (2.3). där n anger snittytans normerade normalriktning.. 2.2 Jämviktsamband. Utöver yttre krafter verkar alltid volymkrafter f = fx ex+ fy ey+ fz ez på kroppen. Dessa definieras som yttre krafter per volym, vilket innebär att de verkar i varje materiel punkt. Exempel på volymkrafter är gravitation och magnetism. Summeras bidraget av alla inre krafter som verkar på det utskurna elementets gränsytor och på dess volym fås kraftsumman F enligt. ò. ò. F = sdA + fdV A. (2.4). V. De inre krafterna ger upphov till vridande moment M på elementet vilket fås då alla krafters bidrag till totala momentet summeras enligt M=. ò (r × s)dA + ò (r × f )dV A. (2.5). V. där r = xex+ yey+ zez är ortsvektorn till respektive krafts angreppspunkt. Ytintegralerna i (2.4) och (2.5) representerar bidraget till respektive storhet från spänningarna på elementets gränsytor.. 5.
(14) I allmänhet varierar spänningarnas från en punkt till en annan i materialet vilket formellt tecknas med bidraget ∆σij och ∆τij i figur 2.2.. σyy+∆σyy τyx+∆τyx. ∆z. τyz+∆τyz. τxz σxx. τzy+∆τzy τzx+∆τzx. ∆y. τxy. τxy+∆τxy. σzz+∆σzz. y. ∆x x. τyx. z. σxx +∆σxx τxz+∆τxz. τyz σyy. Figur 2.2 Schematisk bild av spänningars variation på ett tänkt, ur kroppen utskuret element. Variationen uppstår dels på grund av den yttre globala lastens variation, dels på grund av kroppens geometriändringar.. Ytintegralen i (2.4) tillämpad på elementet i figur 2.2, där basvektorerna ex, ey och ez utgör begränsningsytornas normalvektorer, tecknas med hjälp av samband (2.3) som här nedan, där dAx , dAy , dAz tecknats i figur 2.1.. ò s dA = ò S A. T. ò. ò. ò. ndA = S T e x dAx + S T e y dAy + S T e z dAz. A. Ax. Ay. ò s dA = ò s dA + ò s dA + ò s dA x. A. x. y. Ax. Ay. y. z. (2.6). Az. (2.7). z. Az. Beräkning av första integralen i högerledet av (2.6), dvs summering på ytorna A(x) och A(x+∆x) vars normalriktning är i negativ respektive i positiv x-riktningen, ger. ò S e dA T. x. Ax. x. =. òS. T. (− e x )dAx +. A( x ). òS. T. e x dAx. där dAx = dydz. (2.8). A ( x + ∆x ). Samband (2.2) med beteckningar enligt figur 2.1b och figur 2.2 medför att integranden i respektive integral i ekv (2.8) kan på ytan A(x) skrivas som S T (− e x ) = −S T e x = −s x. där S T = S T ( x ), s x = s x ( x ). 6.
(15) På ytan A(x+ ∆x) gäller på motsvarande sätt där S T = S T ( x + ∆x ), s x = s x ( x + ∆x ). ST e x = s x. Första integralen i ekvation (2.6) och (2.7) kan med ekvation (2.8) och ovanstående samband skrivas om till en volymintegral enligt följande.. ò s dA x. òs. =. x. ∆s x =. (x + ∆x )dAx −. ò s dA = ò x. Ax. V. òs. x. (x )dAx. =. A( x ). ∂s x dx Þ ∂x. ò x. x. x. A( x + ∆x ). Ax. òò ∆s dydz x. yz. òò ∆s dydz = ò x. yz. V. ∂s x dV ∂x. ∂s x dV ∂x. (2.9). Cyklisk permutation av indexen x, y och z i ekvation (9) åtföljt av summation av respektive vänsterled leder slutligen till Gauss sats nedan.. ò s dA = ò s dA + ò s dA + ò s dA x. A. x. y. Ax. =. ò. V. z. =. z. Az. ∂s y ∂s y æ ∂s ∂s x ∂s ö ∂s z dV + dV + dV = çç x + + z ÷÷dV ∂z ø ∂y ∂z ∂x ∂y ∂x V V V è. ò. ò sdA = ò (∇ S ) dV T. T. A. y. Ay. ò. där ∇ = e x. V. ò. ∂ ∂ ∂ + ey + ez ∂x ∂y ∂z. (2.10). På samma sätt som ovan kan ytintegralen i ekvation (2.5) omvandlas till volymintegral. Ett enkelt sätt att göra detta på erhålls om man inför moment per area m = r × s, vilken på respektive yta tecknas mx = r × sx, my = r × sy samt mz = r × sz. Formlerna substituerat in i ytintegralen ger för ytmomentet. ò mdA = ò m dA + ò m dA + ò m dA x. x. y. y. z. (2.11). y. Momentet per area i första integralen av högra ledet i ekvation (2.11) kan på ytan A(x) till följd av rådande spänningsvektor skrivas som. s x = s x ( x). Þ m x = r × s x = m x ( x). S T (−e x ) = −s x. Þ r × (−s x ) = −m x ( x). 7.
(16) Motsvarande gäller på ytan A(x+∆x) där momentet är mx(x+∆x) vilket leder till att integralen nu kan skrivas på samma sätt som tidigare gjorts för spänningsvektorn, vilket resulterade i ekvation (2.9). Motsvarande ekvation för momentet fås enligt följande.. ò m dA x. òm. =. x. x. ( x + ∆x)dAx −. A ( x + ∆x ). Ax. =. òò. òm. x. ( x)dAx =. A( x ). ∆m x dydz =. yz. ò. V. ∂m x dV ∂x. Cyklisk permutation av indexen x, y och z i ovanstående ekvation ger efter summering av respektive del ytintegralen omformad till volymintegral enligt nedan. ∂m y æ ∂m x ∂m z mdA = m x dAx + m y dAy + m z dAz = çç + + ∂z ∂y ∂x A Ax Ay Az V è. ò. ò. ò. ò. ò. ö ÷÷dV ø. Formell derivering av x- termen i ovanstående volymintegral ger mx = r ×sx. Þ. ∂m x ∂s ∂s ∂r = × sx + r × x = ex × sx + r × x ∂x ∂x ∂x ∂x. Cyklisk permutation av indexen x, y och z och summering enligt volymintegralen ovanför ger för sista termen, innehållande derivata av spänningsvektorn, summan r×. ∂s y ∂s z ∂s y æ ∂s ∂s x ∂s + + r × z = r × çç x + +r× ∂z ∂y ∂z ∂y ∂x è ∂x. ö ÷÷ = r × ∇ T S ø. (. ). T. Summan av samtliga termer ger slutligen Gauss sats för ytmomentet enligt. ò (r × s )dA = ò (e A. x. (. × s x + e y × s y + e z × s z + r × ∇T S. V. ). T. )dV. (2.12). Med (2.10) och (2.12) kan kraft- och momentsumman (2.4) och (2.5) tecknas som F=. ò ((∇ S) T. T. + f )dV. (2.13). V. M=. ò (e. x. [. ]. × s x + e y × s y + e z × s z + r × (∇ T S) T + f )dV. (2.14). V. På grund av de yttre lasterna kommer kroppen att förskjutas och/eller deformeras vilket också gäller för det utskurna elementet vars rörelsemängd och rörelsemängdsmoment därmed ändras. Rörelsemängdlagarna tecknas enligt följande.. 8.
(17) Rörelsemängden p och rörelsemängdmomentet h för utskurna elementet definieras genom integralsambanden. ò. (2.15). ò (r × ρv )dV. (2.16). p = ρ vdV V. h=. V. där ρ definierar materialets densitet och vektorn v representerar en materielpunkts förskjutningshastighet. Newtons 2:a lag, rörelsemängdens och rörelsemängdmomentets bevarande, tillämpat på elementet ger kraftekvationen Dp =F Þ Dt. D( ρv ) = (∇ T S) T + f Dt. (2.17). och momentekvationen Dh =M Þ Dt. D(r × ρv ) = e x × s x + e y × s y + e z × s z + r × (∇ T S) T + f Dt. (. ). (2.18). där materiella derivatan i vänstra ledet definieras av sambandet D ∂ = + v ⋅∇ Dt ∂t. (2.19). Formel derivering av (2.18) tecknas med hjälp av (2.17) som D(r × ρv ) Dr D ( ρv ) Dr = × ρv + r × = × ρv + r × (∇ T S) T + f Dt Dt Dt Dt. (. ). (2.20). Av ekvationerna (2.18) och (2.20) framgår att följande samband råder Dr × ρv = e x × s x + e y × s y + e z × s z Dt. (2.21). Definitionen (2.19) tillämpad på ortsvektorn r i ekvation (2.20) ger Dr ∂r = + (v ⋅ ∇ )r = v + (v ⋅ ∇ )r Dt ∂t. ü ï ï ý ∂r ∂r ∂r (v ⋅ ∇ ) r = v x + v y + v z = vxe x + v ye y + vz e z = v ï ïþ ∂x ∂y ∂z. Þ. Dr × ρv = 2 ρ( v × v ) = 0 Dt. Dr = 2v Dt. (2.22). 9.
(18) Sambandet (2.22) instoppat i (2.20) leder slutligen till följande alternativa formulering av rörelsemängdsmomentlagen. D(r × ρv ) = r × ∇T S + f Dt. (. ). (2.23). Sambandet (2.22) instoppat i (2.21) ger att summan av kryssprodukterna i högra ledet av (2.21) är noll. Utveckling av vardera kryssprodukt och summering ger 1) e x × s x = e x × (σ x e x + τ xy e y + τ xz e z ) = τ xy e z − τ xz e y 2) e y × s y = e y × (τ yx e x + σ y e y + τ yz e z ) = − τ yx e z + τ yz e x 3) e z × s z = e z × (τ zx e x + τ zy e y + σ z e z ) = τ zx e y − τ zy e x e x × s x + e y × s y + e z × s z = (τ yz − τ zy )e x + (τ zx − τ xz )e y + (τ xy − τ yx )e z = 0. Då kryssprodukten i högra ledet av (2.21) är noll måste differensen inom varje parantes vara noll, vilket leder till att. τ yz = τ zy. och τ zx = τ xz. samt τ xy = τ yx. (2.24). Resultatet innebär att skjuvspänningskomponenterna är symmetriska med avseende på indexen. Härledningen som resulterade i symmetrisamband (2.24) har gjorts med allmän formulering utifrån rörelsemängdlagarna vilket innebär att spänningars symmetriegenskaper gäller allmänt, såväl vid dynamiska som statiska problem.. 2.3 Definition av töjningar Töjningar definieras som avståndsändring mellan två materiella punkter per avstånd mellan dessa punkter. Flera olika definitioner föreligger beroende på valet av referenssystem. Eulers och Lagranges definition av töjningar används vanligtvis inom hydromekaniken medan töjningar definierade av Green, Almansi och Cauchy används inom fasta kroppens mekanik. Lagranges och Greens töjningar definieras utifrån ett från början odeformerat referenssystem. Töjningar enligt Euler, Almansi definieras utifrån deformerat system. Vid små deformationer är skillnaden mellan odeformerat och deformerat tillstånd försumbar. Detta medför att olinjära termer i Lagranges och Eulers töjningsdefinition kan försummas i förhållandet till linjära termer varvid båda definitionerna antar samma uttryck Töjningar definierade av endast linjära termer benämnes som Cauchytöjningar. I detta avsnitt kommer Cauchys och Greens töjningar att härledas då dessa användas i den fortsatta teoriframställningen.. 10.
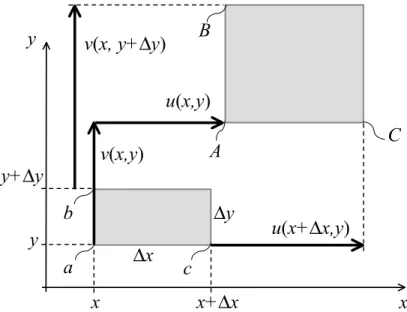
(19) Betrakta ett kvadratiskt element med längderna ∆x respektive ∆y i xy-planet och i ett initialt odeformerat tillstånd. På grund av belastningen kommer elementet att translatera och rotera i planet samt deformeras. Deformationen utgörs av normaltöjningar och skjuvtöjningar. Normaltöjning innebär att elementet ändrar storlek men behåller sin form, figur 2.3. Skjuvtöjning innebär att elementet ändrar form, se figur 2.4. Ett ursprungligen odeformerat element med längden ∆x och bredden ∆y samt hörnen i a, b och c enligt figur 2.3, har till följd av pålagd last deformerats med bibehållen form varvid hörnen förskjutits till nya positioner i A, B och C. Förskjutningen av hörnet i a till A ges av vektorn u(x,y) = u(x,y)ex+ v(x,y)ey , hörnet i b till B ges av vektorn u(x,y) = u(x,y)ex+ v(x, y+∆y)ey och hörnet i c till C av u(x,y) = u(x+∆x, y)ex+ v(x, y)ey.. y. B. v(x, y+∆y). u(x,y) C. A. v(x,y) y+∆y. ∆y. b y. ∆x. a x. u(x+∆x,y). c x+∆x. x. Figur 2.3 Förskjutningskomponenter vid formbeständig deformation av ett ursprungligen obelastat element med hörnpunkterna a, b och c vilka efter translation och normaltöjning hamnat i punkterna A, B och C. Elementet i figuren ändrar storlek men behåller den rektangulära formen.. Linjära normaltöjningen definieras allmänt som längdändring per ursprunglig längd och ges approximativt i ett initialt obelastat referenssystem av ε=. L − L0 L0. (2.25). Sambandet (2.25) tillämpat på element ger approximativt normaltöjningen i x-led som üï u ( x + ∆x,y ) − u ( x,y ) ý ε xx ≅ ∆x L = ∆x + u ( x + ∆x,y )-u ( x,y )ïþ L0 = ∆x. 11.
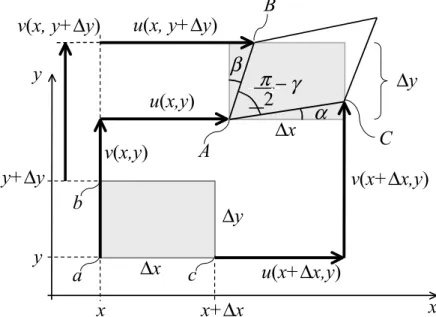
(20) Den matematiskt exakta linjära töjningen i en punkt vid små deformationer fås då gränsövergång lim ∆x→ 0 görs varvid normaltöjning i x-led definieras som æ u ( x + ∆x, y ) − u ( x, y ) ö ∂u ( x, y ) ε xx = lim ç ÷= ∆x →0 ∆x ∂x è ø. (2.26). Skjuvtöjningen γ definieras av elementets formändring till följd av belastningen varvid elementets hörnvinklar ändrar sin form såsom åskådliggörs i figur 2.4. I figuren har t.ex. vinkeln på det ursprungligen räta hörnet i punkten a minskats med vinkeln γ =α +β som en konsekvens av pålagda belastningen.. B. u(x, y+∆y). v(x, y+∆y). β. y u(x,y) A. v(x,y). π.−. γ 2 α ∆x. y+∆y. ∆y C v(x+∆x,y). b y. ∆y ∆x. a. u(x+∆x,y). c. x. x. x+∆x. Figur 2.4 Schematisk bild av skjuvdeformation som medför att ursprungliga rektangulära elementet ändrar form men behåller sin storlek. Deformationen definieras genom minskningen av ursprungligen räta vinkeln i hörnet a, punkten (x,y).. Vinkeländringen tecknas approximativt vid små deformationer av geometrisamband för respektive triangel som tan α =. v( x + ∆x,y ) − v( x,y ) ∆x. respektive tan β =. u ( x,y + ∆y ) − u (x,y ) ∆y. Vid små deformationer gäller att α ≈ tanα och β ≈ tanβ med vars hjälp det matematiska värdet fås vid gränsövergången ∆x, ∆y → 0 vilket leder till. α+β ≅. v( x + ∆x,y ) − v(x,y ) u ( x,y + ∆y ) − u ( x,y ) + ∆x ∆y. γ xy = lim (α + β ) = ∆x → 0 ∆y → 0. ∂v( x,y ) ∂u ( x,y ) + ∂x ∂y. (2.27). 12.
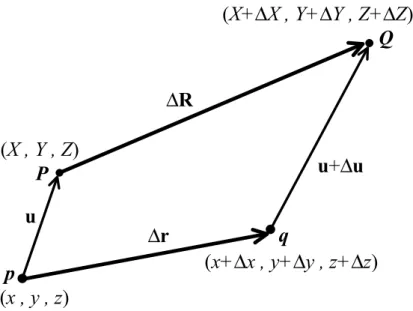
(21) Skjuvtöjningskomponenterna är såsom skjuvspänningskomponenterna (2.24) symmetriska eftersom ett byte av indexordning inte förändrar komponentens betydelse. γ xy =. ∂u ∂v + ∂y ∂x. Þ γ yx =. ∂v ∂u + ∂x ∂y. Þ γ xy = γ yx. (2.28). Linjära töjningar i y- respektive z-riktningen härleds på motsvarande sätt som gjorts i (26)(28) varvid samtliga linjära töjningskomponenter i 3-dimensioner definieras av ε xx =. ∂u ∂x. ε yy =. ∂u ∂v γ xy = + ∂y ∂x. γ yz. ∂v ∂y. ε zz =. ∂v ∂w = + ∂z ∂y. ∂w ∂z. (2.29). ∂w ∂u γ zx = + ∂x ∂z. Införs skjuvtöjningarna γxy=2εxy , γxz=2εxz , och γyz=2εyz samt deformationsmatrisen D som erhålls då komponenterna förskjutningsvektorn u differentieras, kan Cauchys töjningar sammanfattas i en töjningsmatris Ec enligt följande.. ü ∂u ∂u ∂u ∆x + ∆y + ∆z ï ∂x ∂y ∂z ï ∂v ∂v ∂v ï ∆v = ∆x + ∆y + ∆z ý Þ ∆u = D∆r ∂x ∂y ∂z ï ∂w ∂w ∂w ï ∆w = ∆x + ∆y + ∆z ï ∂x ∂y ∂z þ. ∆u =. é ∂u ê ∂x ê ∂v D=ê ê ∂x ê ∂w ê êë ∂x. ∂u ∂y ∂v ∂y ∂w ∂y. ∂u ù ∂z úú é ε xx ∂v ú ê T 1 Þ E c = D + D = ê ε xy 2 ∂z ú êε xz ú ë ∂w ú ∂z úû. (. ). (2.30). ε xy ε yy ε yz. ε xz ù ú ε yz ú ε zz úû. (2.31). I de fall små deformationer ej längre kan antas råda måste töjningskomponenterna kompletteras med olinjära termer. Greens töjningar vilka härleds i ett initialt obelastat och därmed odeformerat referenssystem tar hänsyn till stora deformationer varvid bidraget från de ickelinjära termerna erhålls. En sådan härledning görs i följande avsnitt. Figur 2.5 visar ett fiberelementet med längden ∆r mellan punkterna p och q i ett obelastat material. Då materialet belastas kommer fiberelementet både förskjutas och töjas ut i rymden varvid det antar nytt läge mellan punkterna P och Q med nya längden ∆R. Med vektoralgebra kan deformationen tecknas enligt följande.. 13.
(22) Sträckan mellan punkterna p och q definieras av vektorn ∆r = ∆xex + ∆yey + ∆zez och avståndet definieras som ∆r = ç∆r ç. Motsvarande strecka mellan punkterna P och Q ges av vektorn ∆R=∆Xex + ∆Yey + ∆Zez och ∆R =ú ∆R ç. Förskjutningen av punkten p till P ges av vektorn u = uex + vey + wez och av punkten q till Q av vektorn u + ∆u.. (X+∆X , Y+∆Y , Z+∆Z) Q ∆R (X , Y , Z) P. u+∆u. u. ∆r. p (x , y , z). q (x+∆x , y+∆y , z+∆z). Figur 2.5 Schematisk bild av ett fiberelements deformation. Då kroppen är obelastad är fibern belägen mellan punkterna p och q. Då kroppen belastas kommer fiberelementet att förskjutas och deformeras så att den slutligen antar ny position mellan punkterna P och Q.. En motsvarighet till linjär töjning (2.25) men som tar hänsyn till icke linjära termer, definierat enligt Green i initialt odeformerat referenstillstånd, ges av. L2 − L0 ε= 2 2L0. 2. (2.32). Matrisalgebra med vektorer och geometri enligt figur 2.5 ger följande alternativa uttryck ε≅. ∆R 2 − ∆r 2 ∆R T ∆R − ∆r T ∆r = 2∆r 2 2∆r T ∆r. (2.33). Sträckan mellan punkterna p och Q kan med införda vektorer tecknas som. u + ∆R = ∆r + (u + ∆u ) Þ ∆R = ∆r + ∆u ∆RT ∆R = (∆r + ∆u ) (∆r + ∆u ) = T. (. ). = ∆r T + ∆uT (∆r + ∆u ) = ∆rT ∆r + ∆rT ∆u + ∆uT ∆r + ∆uT ∆u. 14. (2.34).
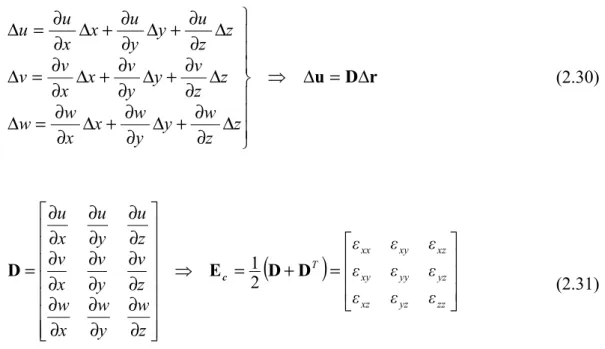
(23) Deformationsmatrisen (2.31) och samband (2.34) insatt i täljaren i ekvation (2.33) leder till följande definition av fiberns töjning.. ∆RT ∆R − ∆r T ∆r = ∆r T ∆u + ∆uT ∆r + ∆uT ∆u = = ∆r T D∆r + (D∆r ) ∆r + (D∆r ) D∆r = T. T. = ∆r T D∆r + ∆r T DT ∆r + ∆r T DT D∆r = = ∆r T (D + DT + DT D)∆r. ε≅. ∆r T (D + DT + DT D)∆r 2∆r T ∆r. (2.35). Införs ∆r = er ∆r där er är enhetsvektor eTr ⋅ e r = 1 , kan ekvation ovan tecknas som. (. ). ε ≅ 1 e Tr D + DT + DT D e r 2. (2.36). Av ekvation (2.36) och Cauchys töjningsdefinition (2.30) framgår att Greens töjningar på matrisform lämpligen nu definieras av den symmetriska töjningsmatrisen E nedan. (. ). E = 1 D + DT + D T D = E c + 1 D T D 2 2. (2.37). varvid alla ingående komponenterna tecknas som 2 2 2 ∂u 1 æç æ ∂u ö æ ∂v ö æ ∂w ö ö÷ ε xx = + ç ÷ +ç ÷ +ç ÷ ∂x 2 çè è ∂x ø è ∂x ø è ∂x ø ÷ø 2 2 2 ∂v 1 æç æ ∂u ö æ ∂v ö æ ∂w ö ö÷ ε yy = + çç ÷÷ + çç ÷÷ + çç ÷÷ ∂y 2 çè è ∂y ø è ∂y ø è ∂y ø ÷ø 2 2 2 ∂w 1 æç æ ∂u ö æ ∂v ö æ ∂w ö ö÷ ε zz = + ç ÷ +ç ÷ +ç ÷ ∂z 2 çè è ∂z ø è ∂z ø è ∂z ø ÷ø ∂u ∂v ∂u ∂u ∂v ∂v ∂w ∂w + + + + γ xy = = 2ε xy ∂y ∂x ∂x ∂y ∂x ∂y ∂x ∂y. (2.38). ε xy = ε yx. γ xz =. ∂u ∂w ∂u ∂u ∂v ∂v ∂w ∂w + + + + = 2ε xz ∂z ∂x ∂x ∂z ∂x ∂z ∂x ∂z. ε xz = ε zx. γ yz =. ∂v ∂w ∂u ∂u ∂v ∂v ∂w ∂w + + + + = 2ε yz ∂z ∂y ∂y ∂z ∂y ∂z ∂y ∂z. ε yz = ε zy. 15.
(24) 2.4 Konstitutiva ekvationer Härledningen av konstitutiva lagen ges här nedan under antagandet att små deformationer råder. Antagandet är i sammanhanget, buckling av papper, tveksamt men görs för att minska den matematiska komplexiteten. Den mest generella formen på materialsamband som beskriver förhållandet mellan last och deformationer i form av spänningar och töjningar i ett material tecknas som ε = Cσ. (2.39). Då spänningar och töjningar uppvisar symmetriegenskaper (2.23) och (2.29) tecknas sambandet enligt nedan varvid C-matrisen beskriver materialets egenskaper. æ ε xx ö éC11 C12 ç ÷ ê ç ε yy ÷ êC 21 C 22 ç ε ÷ êC C 32 ç zz ÷ = ê 31 ç γ xy ÷ êC 41 C 42 ç ÷ ê ç γ xz ÷ êC 51 C 52 ç γ ÷ êC è yz ø ë 61 C 62. C13 C 23 C 33 C 43 C 53 C 63. C14 C 24 C 34 C 44 C 54 C 64. C15 C 25 C 35 C 45 C 55 C 65. C16 ù æ σ xx ö ç ÷ C 26 úú ç σ yy ÷ C 36 ú ç σ zz ÷ ÷ ú ⋅ç C 46 ú ç τ xy ÷ ç ÷ C 56 ú ç τ xz ÷ ú C 66 ûú çè τ yz ÷ø. (2.40). Papper är ett inhomogent material och dess materialegenskaper varierar lokalt. Inhomogeniteterna beror huvudsakligen på att fibrernas koncentration och orientering varierar lokalt. Fibrernas orientering är aningen annorlunda ute vid kanterna än vad som är fallet mitt i pappersbanan. Bortser man dock ifrån dessa variationer som uppträder på mikroskopisk nivå utkristalliseras tre karakteristiska materialriktningar. Två i papperets plan och den tredje i papperets tjockleksriktning. De i papperets plan benämns utifrån papperets tillverkningsriktning. Maskinriktningen benämns med MD (machine direction) och tvärsriktningen som CD (cross direction). Den i papperets tjockleksriktning benämns ZD, (z-direction). Papper uppvisar således på makronivå symmetriska materialegenskaper i tre specifika riktningar vilket används för att bestämma några av de 36 obekanta koefficienter i C -matrisen enligt följande. Spänningar i och deformationer av ett material kan rimligtvis inte ändra karaktär då referenssystemets koordinataxlar speglas med avseende på symmetriplanen. Detta eftersom koordinataxlar endast byter riktning men förblir parallella med tidigare riktningar. Såsom ex. spegling av koordinaterna r i z- planet till ˆr , vilket görs med trasformationsmatrisen A enligt nedan. æ ˆx ö æ x ö æ xˆ ö é 1 0 0 ù æ x ö ç ÷ ç ÷ ç ÷ ê ú ç ÷ ç ˆy ÷ = ç y ÷ Þ ç ˆy ÷ = ê0 1 0 ú ⋅ ç y ÷ Þ ç ˆz ÷ ç − z ÷ ç ˆz ÷ ê0 0 − 1 ú ç z ÷ è ø è ø è ø ë û è ø. 16. é1 0 0 ù A = êê0 1 0 úú êë0 0 − 1 úû. (2.41).
(25) Speglingen i z-riktningen av den symmetriska spännings- och töjningsmatrisen erhålls genom nedan tecknad transformation.. ˆ = A SA S T. éσˆ xx ˆτ xy τˆ xz ù éσ xx τ xy − τ xz ù ê ú ê ú ⇔ ê sym σˆ yy ˆτ yz ú = ê sym σ yy − τ yz ú ê sym sym σˆ zz ú ê sym sym σ zz úû ë û ë. ˆγ xz ù é2ε xx é2εˆ xx γ xy − γ xz ù γˆ xy ê ú ê ú T ˆ = A EA ⇔ E γˆ yz ú = ê sym 2ε yy − γ yz ú ê sym 2εˆ yy ê sym ˆ zz úû êë sym sym 2 ε sym 2ε zz úû ë. (2.42). Materialets egenskaper ändras inte då koordinatsystemet speglas i symmetriplanen. I givna exemplet innebär det att ˆz -riktning pekar i tidigare negativa z-riktningen. Således kan konstitutiva lagen nu tecknas som tidigare samband (2.39) och (2.40) vilket med hänsyn till de nya komponenterna (2.42) ger följande. ˆε = C σ ˆ. (2.43). Tredje raden i konstitutiva lagen (2.40) och (2.43) ger normaltöjningen i z- och ˆz -led ε 33 = C 31σ xx + C 32 σ yy + C 33 σ zz + C 34 τ xy + C 35 τ xz + C 36 τ yz. (2.44). εˆ 33 = C 31σˆ xx + C 32 σˆ yy + C 33 σˆ zz + C 34 ˆτ xy + C 35 ˆτ xz + C 36 ˆτ yz. (2.45). Spänningskomponenter enligt (2.42) instoppat i (2.45) ger sambandet. ε 33 = C 31σ xx + C 32 σ yy + C 33 σ zz + C 34 τ xy − C 35 τ xz − C 36 τ yz. (2.46). Då töjningen i ε33- och εˆ 33-riktning nödvändigtvis måste vara lika vilket uppfylls endast om komponenterna C35 och C36 i C-matrisen är noll. På motsvarande sätt erhålls för de övriga två riktningarna vilket slutligen leder till att konstitutiva lagen (2.40) nu tecknas æ ε xx ö é C11 C12 ç ÷ ê ç ε yy ÷ êC 21 C 22 ç ε ÷ êC C 32 ç zz ÷ = ê 31 ç γ xy ÷ ê 0 0 ç ÷ ê 0 ç γ xz ÷ ê 0 çγ ÷ ê 0 0 è yz ø ë. C13 C 23 C 33 0 0 0. 0 0 0 C 44 0 0. 0 0 0 0 C 55 0. 0 ù æ σ xx ö ç ÷ 0 úú ç σ yy ÷ 0 ú ç σ zz ÷ ÷ ú ⋅ç 0 ú ç τ xy ÷ ç ÷ 0 ú ç τ xz ÷ ú C 66 úû çè τ yz ÷ø. (2.47). Konstitutiva lagen (2.47) gäller under förutsättningen att koordinatsystemet väljs så att det sammanfaller med materialriktningarna. I nästkommande avsnitt redovisas hur de resterande 12 komponenterna i C-matrisen kan bestämmas.. 17.
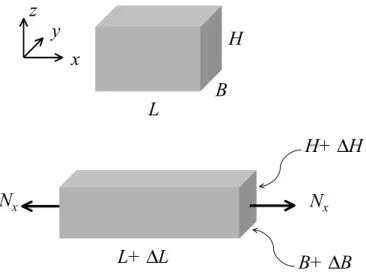
(26) Ett material deformeras vid belastning och deformationen beror på belastningens storlek och riktning. Om t.ex. ett rätblock med längden L, bredden B och höjden H belastas med en draglast i längdriktningen (x-riktn.) kommer rätblockets längd öka samtidigt som bredden och höjden minskar, se figur 2.6. Denna tvärkontraktion är en fysikalisk nödvändighet som lätt kan observeras då man drar i ett gummiband eller deg vid bakning.. z. y. H. x L. B H+ ∆H. Nx. Nx L+ ∆L. B+ ∆B. Figur 2.6 Schematisk bild av ett rätblocks dimensionsändring vid enaxlig belastning. En draglast medför att rätblockets längd ökar samtidigt som dess övriga dimensioner minskar, sk tvärkontraktion.. Fysikalisk förklaring av förloppet ges av den fundamentala lagen om massans oförstördbarhet, dvs att massa ej kan nyskapas eller förintas. Ett initialt obelastat rätblock av ett idealt material vars ursprungliga massa är m och volym är V=LBH. Med idealt material avses att materialet är homogent, rent och isotropt, dvs att tätheten och den atomära strukturen överallt är lika samt att materialets fysikaliska egenskaper är lika i alla riktningar, t.ex. så som i en absolut ren vätska. Rätblockets massa består således av en mängd likadana atomer som överallt är lika fördelade och binds samman med bindningar i en tät gitterstruktur. Varje atom upptar en viss konstant volym ∆V och totala volymen fås då alla atomers volym summeras, V=Σ ∆V. En på rätblocket applicerad draglast Nx ändrar inte antalet atomer i rätblocket, vilket innebär att volymen nödvändigtvis måste vara densamma efter som före belastningen och således gäller att V= LBH=(L+∆L)(B+∆B)(H+∆H)=Σ ∆V. Då rätblockets längd ökar på grund av draglasten måste övriga dimensioner minska för att totala volymen skall förbli densamma. Alltså är ändringen av tvärsnittets dimensioner, bredden och höjden i ovanstående uttryck, negativa storheter, ∆B<0 och ∆H<0. Under antagandet att materialets respons på belastningen är linjär kan sambandet mellan lasten N och förlängningen ∆L på strukturnivå tecknas med Hookes lag N=k∆L , där k är den s.k. fjäderkonstanten. Motsvarigheten på materialnivå, dvs Hookes lag uttryckt i spänningar och töjningar fås med hjälp av spänningsdefinitionen och linjär töjning enligt tidigare (2.25), vilket tecknas enligt följande där den för materialet karakteristiska elasticitetsmodulen, vanligtvis benämnd som E-modul, har införts.. 18.
(27) Med hänsyn till koordinatsystemets riktningar enligt figur 2.6 fås. Nx A ∆L = L. Spänning : σ xx = Töjning :. ε xx. ü ï ý N x = k∆L Þ σ xx = E x ε xx ï þ. (2.48). I definitionen av spänningen enligt ovan har inget nämts om vilken tvärsnittsarea A som avses. Vanligtvis används arean BH då töjningarna är små och arean (B+∆B)(H+∆H ) då töjningarna är stora vilket innebär att minskningen av den lastbärande tvärsnittsarean på grund av tvärkontraktionen ej längre kan försummas. Utifrån tidigare resonemang antas att tvärkontraktionen är direkt proportionell mot längdändringen och då denna är positiv skall tvärsnittets dimensioner minska. Detta kan tecknas enligt sambanden ∆B =− kB∆L respektive ∆H =− kH∆L, där kB och kH är positiva konstanter. Definition av normaltöjningar (2.25) tillsammans med (2.48) tillämpat på övriga riktningar i figur 2.6 ger ε yy =. ∆B B. ∆H ε zz = H. Þ. ∆ B = −k B ∆L ∆H = − k H ∆L. Þ. Bε yy = − k B ε xx L Hε zz = − k H ε xx L. Þ. ε yy = −ν xy ε xx. (2.49) ε zz = −ν xz ε xx. I sista ledet har materialkonstanten ν införts. Denna benämns som Poissons tal och utgör ett mått på materialets tvärkontraktion. Kombineras ekvation (2.47), (2.48) och (2.49) enligt nedan fås koefficienterna i C-matrisens första kolumn. æ ε xx ö é C11 ç− ν ε ÷ ê ç xy xx ÷ êC 21 ç − ν xz ε xx ÷ êC 31 ç γ xy ÷ = ê 0 ç γ ÷ ê 0 xz çç ÷÷ ê è γ yz ø ë 0 Þ C11 =. 1 Ex. C12 C 22 C 32 0 0 0. C13 C 23 C 33 0 0 0. och C 21 =. 0 0 0 C 44 0 0 − ν xy Ex. 0 0 0 0 C 55 0. 0 ùæ E x ε xx ö 0 úçç 0 ÷÷ 0 úç 0 ÷ ú 0 úç 0 ÷ 0 úç 0 ÷ C 66 úûçè 0 ÷ø. samt C 31 =. − ν xz Ex. (2.50). Förfarandet upprepas för övriga normalspänningar vilket resulterar i C12 =. − ν yx. Ey − ν zx C13 = Ez. och −" −. C 22 = C 23 =. 1 Ey − ν zy Ez. 19. samt −" −. C 32 =. − ν yz. Ey 1 C 33 = Ez. (2.51).
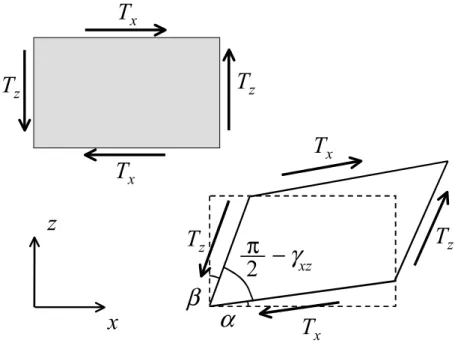
(28) Koefficienter C44, C55 och C66 bestäms med hjälp av Hookes lag avseende skjuvning. En på rätblocket applicerad skjuvlast T1 resp. T2 medför att detinitialt obelastade rätblocket i figur 2.6 ändrar form i xz-planet så som åskådliggörs i figur 2.7 nedan. Formändringen definieras av vinkeländringen av det ursprungligen obelastade rätblockets räta hörn, figur 2.4.. Tx Tz. Tz. Tx. Tx z. Tz x. β. π .− γ xz 2. α. Tz. Tx. Figur 2.7 Schematisk bild av ett rätblocks formändring vid skjuvande last som medför att rätblockets initialt vinkelräta hörn ändras.. Skjuvspänningar definieras på motsvarande sätt som normalspänningarna har gjorts vid härledning av ekvation (2.48). Definition av respektive spänningskomponents index enligt avsnitt 2.1 ger skjuvspänningen på aktuella ytan.. τ xz =. Tz Ax. (2.52). Hookes lag gällande skjuvspänningar och skjuvtöjning definieras på motsvarande sätt som för normalkomponenterna varvid G betecknar materialets skjuvmodul.. τ xz = G xz γ xz. (2.53). Ekvation (2.53) kombinerat med femte raden i (2.47) ger koefficienten C55 nedan. På motsvarande sätt erhålls koefficienterna C44 och C66.. C 44 =. 1 G xy. och C 55 =. 1 G xz. resp C 66 =. 20. 1 G yz. (2.54).
(29) Koefficienterna enligt (2.50), (2.51) och (2.54) ger slutligen Hookes generella lag som på matrisform nu tecknats é 1 ê ê Ex ê − ν xy ê æ ε xx ö ê E x çε ÷ ç yy ÷ ê − ν xz ç ε zz ÷ ê E x ç γ xy ÷ = ê çγ ÷ ê 0 çç xz ÷÷ ê ê è γ yz ø ê 0 ê ê ê 0 êë. − ν yx. − ν zx Ez − ν zy. Ey 1 Ey − ν yz. Ez 1 Ez. Ey. 0. 0. 0. 0. 0. 0. 0. 0. 1 G xy. 0. 0. 0. 1 G xz. 0. 0. 0. 0. 0. ù 0 ú ú ú 0 ú úæç σ xx ö÷ ú σ yy 0 úç ÷ çσ ÷ úç zz ÷ ú τ xy 0 úç τ ÷ ç xz ÷ úç τ yz ÷ è ø 0 ú ú 1 ú ú G yz úû. (2.55). Av (2.55) framgår att totalt 12 st materialparametrar behövs för att fullt ut definiera ett elastiskt materials egenskaper. Med elastiskt material avses att materialets respons är oberoende av belastningshistorien. Pålastning och avlastning följer samma graf i diagrammet som beskriver deformationens beroende av lasten. Processen sägs vara reversibel vilket innebär att yttre arbetet som uträttas på systemet vid pålastning upplagras i systemet som inre energi och återfås helt och hållet vid avlastning. För ett linjärt elastiskt material leder detta till att den inre töjningsenergi definieras som W=. 1 2. ò (σ ε )dV = ò (ε σ )dV T. V. T. 1 2. (2.56). V. Konsekvensen av ovanstående fås då ex (2.55) substitueras in i (2.56) vilket resulterar i symmetrisambandet. σ T ε = σ T (C σ) = σ T C σ ü T ý Þ C=C T T T T ε σ = (C σ ) σ = σ C σ þ. (2.57). Ovanstående stipulerar att C-matrisen för ett elastiskt material är symmetrisk med avseende på huvuddiagonalen. Detta medför att mellan komponenterna utanför huvuddiagonalen i Hookes lag (2.55) råder nedan tecknade symmetrisamband. ν yx Ey. =. ν xy Ex. ν zx ν xz = Ez Ex. ν zy Ez. =. ν yz. (2.58). Ey. 21.
(30) 2.5 Analytisk modell vid belastning av plattor. Den modell för deformation av plattor som här presenteras baseras på definitioner och samband med utgångspunkt i en kontinuummekanisk modell för spänningstillståndet i ett material. Vidare antaganden om statisk jämvikt, deformation och materialets egenskaper enligt leder till Kirchhoffs och von Kármáns teori för böjning och buckling av tunna plattor. En kropp definieras som tunn platta då tjockleken h mellan plattans två huvudsakliga begränsningsytor, ovan- och undersidan, är mycket mindre än plattans dimensioner i planet, längden L och bredden B, dvs. h<< L, B. På lika avstånd från plattans ovan- och undersida ligger medelytan. Ett till plattan tillhörande cartesiskt koordinatsystem positioneras så att xyplanet sammanfaller med plattans medelyta vid obelastat tillstånd. Plattans tjocklek antas vara konstant och förskjutningar antas överallt vara mycket mindre än plattans tjocklek. I praktiken innebär dessa antaganden att plattan förblir plan under belastningen, att –½h≤ z ≤ ½h och att z ≠ f(x,y). Plattans användningsområde är sådan att belastningen vanligtvis medför att plattan töjs i planet och/eller böjs ut ur sitt plan. Detta medför att normalspänningarna i plattans plan är mycket större än normalspänningen tvärs planet, úσzz ç<<úσxx ç,úσyy ç. Eventuell friktion på plattans ovan- och undersidan, t.ex. till följd av ett runt plattan strömmande medium, ger upphov till skjuvspänningar på dessa ytor. Dessa skjuvspänningarna är dock mycket mindre än övriga spänningskomponenter och kan försummas jämte dessa. Således antas att skjuvspänningarna τxz ≈ τyz ≈ 0 överallt i plattan. Sammanfattning A1.Plattans tjockleken är konstant, h = konst. A2.Plattan är tunn, h<< L, B. A3. Deformationen är infinitesimal, ú u ç,ú v ç,ú w ç<< h. A4.Plattan förblir plan vid deformation, – ½h≤ z ≤ ½h, z ≠ f(x,y). A5.Normalspänningar är störst i planet, úσzz ç<<úσxx ç,úσyy ç. A6.Skjuvspänningarna τxz ≈ τyz ≈ 0.. σzz. dAz=dxdy. ∆V=∆x∆y∆z. z x. y. σxx. h. τxy τxy ∆y. dAx=dydz. σyy. ∆x. dAy=dxdz. Figur 2.8 Huvudsakliga spänningskomponenter som antas verka på en platta. Lasterna medför att elementet roterar runt respektive koordinataxel samt sträcks i planet.. 22.
(31) 2.5.1 Jämvikt Då statisk jämvikt råder är hastigheten överallt noll (v = 0). Detta medför att både rörelsemängden och rörelsemängdsmomentet i vänsterledet av (2.17) och (2.23) är noll. Införs vektorn Ψ = (∇TS)T+f kan rörelsemängdslagen vid statisk jämvikt med hjälp av integralkalkylens regler tecknas som kraftjämviktsekvationen nedan. ò. F = ΨdV = V. æ ö ç Ψdz ÷dxdy =0 Þ ç ÷ LBè h ø. òò ò. ò Ψdz = 0. (2.59). h. Vektorn Ψ och kraftjämviktsekvationen utskriven på komponentform ger. Ψ = Ψ x e x +Ψ y e y +Ψ z e z = (e Tx Ψ)e x + (e Ty Ψ)e y + (e Tz Ψ)e z ex :. ∂τ yx æ ∂σ xx ö ∂τ zx ç ÷÷dz = 0 Ψ d z = + + + f x x òh ò çè ∂x ∂y ∂z ø. (2.59a). ey :. òΨ dz =ò ççè. ∂σ yy ∂τ zy æ ∂τ xy ö + + + f y ÷÷dz = 0 ∂x ∂y ∂z ø. (2.59b). ∂τ yz æ ∂τ xz ö ∂σ zz + + + f z ÷÷dz = 0 ∂x ∂y ∂z ø. (2.59c). y. h. ez :. òΨ dz = ò ççè z. h. Rörelsemängdsmomentlagen vid statisk jämvikt, tecknad med vektorn Ψ och med hjälp av integralkalkylens regler ger momentjämviktsekvationen M=. ò (r × Ψ )dV. =. V. æ ö ç (r × Ψ )dz ÷dxdy =0 Þ ç ÷ LBè h ø. òò ò. ò (r × Ψ )dz = 0. (2.60). h. Ekvationen reduceras ytterligare genom att tillämpa formella matematiska regler avseende kryssprodukt mellan ortsvektorn r = xex+yey+zez och vektorn Ψ enligt följande.. ò (r × Ψ )dz = ò ((xe h. x. + ye y + ze z )× Ψ )dz = (xe x + ye y )× Ψdz +. ò. h. h. ò (e. z. × Ψ )zdz. h. Enligt (2.59) ovan är den första integralen i sista raden noll. Kryssprodukten i den andra integralen tecknas formellt som e z × Ψ = e z × (Ψ x e x +Ψ y e y +Ψ z e z ) = Ψ x e y −Ψ y e x. Momentjäviktsekvationen (2.60) utskriven på komponentform blir slutligen ex :. ∂σ yy ∂τ zy æ ∂τ xy ö ç Ψ z d z = + + y òh ò çè ∂x ∂y ∂z + f y ÷÷ø zdz = 0. (2.60a). ey :. ∂τ yx æ ∂σ xx ö ∂τ zx ç ÷÷ zdz = 0 Ψ z d z = + + + f x x òh ò çè ∂x ∂y ∂z ø. (2.60b). 23.
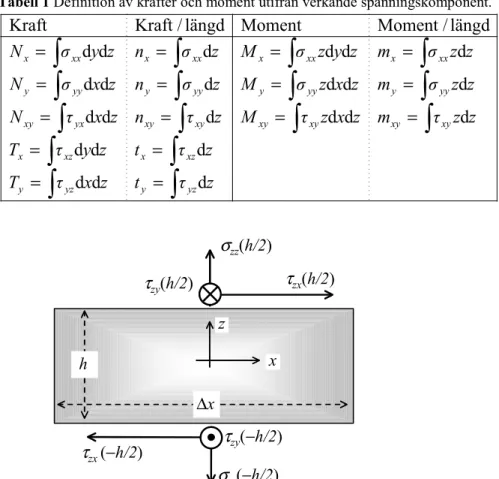
(32) För z-termerna gäller allmänt h/2. ò. ∆Φ =. −h / 2. ∂Φ dz = Φ (h / 2 ) − Φ (− h / 2 ) ∂z. ∂ (Φ ⋅ z )dz = æç h ⋅ Φ (h / 2)ö÷ − æç − h ⋅ Φ (− h / 2)ö÷ ∂z è2 ø è 2 ø −h / 2 h/2 ∂Φ æ ∂ (Φ ⋅ z ) − Φ ö÷dz = mΦ − Φdz ⋅ zdz = ç ∂z ∂z ø −h / 2 è h. mΦ = ∆ (Φ ⋅ z ) = h/2. ò. −h / 2. h/2. ò. ò. (2.61). ò. Sambanden (2.61) in i kraftjämviktsekvationerna (2.59a-c) nu tecknas som (a) :. ò. (b) :. ò. (c) :. ò. æ çç è æ çç è æ çç è. ∂τ yx ö ∂σ xx + + f x ÷÷dz + ∆τ zx = 0 ∂x ∂y ø ∂τ xy ∂σ yy ö + + f y ÷÷dz + ∆τ zy = 0 ∂x ∂y ø ∂τ yz ö ∂τ xz + + f z ÷÷dz + ∆σ z = 0 ∂x ∂y ø. (2.62). och momentjämviktsekvationerna (2.60a-c) som (a) : (b) :. ∂σ yy æ ∂τ xy ö + + f y ÷÷ zdz + m zy = τ zy dz ∂x ∂y ø ∂τ yx æ ∂σ xx ö çç + + f x ÷÷ zdz + m zx = τ zx dz ∂y è ∂x ø. ò ççè. ò. ò. ò. (2.63). För spänningskomponenterna, schematiskt tecknad med Φ = Φ(x,y,z), gäller allmänt att. ò. ∂Φ ∂ Φdz resp dz = ∂x ∂x. ò. ò. ∂Φ ∂ Φdz dz = ∂y ∂y. ò. (2.64). Skjuvspänningars symmetriegenskaper τxz =τzx och τzy =τyz ger med (2.64) att integralerna i högra ledet av (2.63a-b) kan substitueras in i (2.62c) vilket resulterar i plattekvationen æ ∂ 2 σ xx ∂ 2 τ yx ∂ 2 σ yy ç +2 + ç ∂x 2 x y ∂ ∂ ∂y 2 −h / 2 è h/2. ò. där:. pz =. ö ÷ zdz = − p z ÷ ø. (2.65). ∂m zy ∂f y ö æ ∂m zx ∂f ÷dz + + ∆σ z + çç f z + z x + z ∂x ∂y ∂x ∂y ÷ø è. ò. Den yttre lasten pz på plattan utgörs av volymlaster och ytlaster i form av normal- och skjuvspänningar på plattans ovan- och/eller undersida, se figur 2.9. Normalspänningen σzz representerar utbredd last/tryck tvärs plattans plan och skjuvspänningarna τzx och τzy, uppkommer t.ex. på grund av friktionslaster på plattan från omgivningen. Skjuvklasterna ger upphov till momenten per längdenhet mzx och mxz.. 24.
(33) Resulterande krafter och moment på elementets gränsytor definieras utifrån verksam spänningskomponent enligt tabell 1 och tillhörande riktningar i xy-planet visas i figur 2.10. Böjmomenten Mx och My definieras positiva då deras verkan medför att plattans ovansida sträcks vid belastning. Vridmomenten Myx och Mxy positiva verkan är sådana att de medför rotation moturs i respektive xz- och yz-plan. Tabell 1 Definition av krafter och moment utifrån verkande spänningskomponent.. Kraft N x = σ xx dydz. ò N = ò σ dxdz N = ò τ dxdz T = ò τ dydz T = ò τ dxdz y. yy. xy. yx. x. xz. y. yz. Kraft / längd Moment n x = σ xx dz M x = σ xx zdydz. ò n = ò σ dz n = ò τ dz t = ò τ dz t = ò τ dz y. yy. My. xy. xy. M xy. x. xz. y. yz. ò = òσ = òτ. Moment / längd mx = σ xx zdz. yy. zdxdz. my. xy. zdxdz mxy. ò = òσ = òτ. yy. zdz. xy. zdz. σzz(h/2) τzx(h/2). τzy(h/2) z x. h ∆x. τzy(−h/2). τzx (−h/2). σzz(−h/2). Figur 2.9 Yttre laster på plattans ovan- och undersida i form av spänningar tecknade i xz-planet.. Myx. Ny. My. Nyx N xy. − Mxy. y. Nx. ∆y. Mx Nx. x. Mx. ∆x Nxy. Nyx. − Mxy My. Ny. Myx. Figur 2.10 Definition av krafters och moments riktningar utifrån verksamma spänningskomponent.. 25.
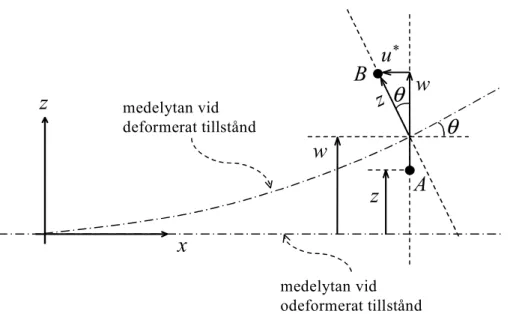
(34) 2.5.2 Deformation Till följd av de laster som verkar på en platta kommer en initialt obelastad materiepunkt i A, att förskjutas till punkten B i figur 2.11. Antaganden (A1)-(A4) innebär i praktiken att plattan approximativt är plan även vid belastning, tecknas matematiskt z ≠ f(x,y), vilket medför att rotationer θ i xz-planet är mycket små, úθ ç<< 1. Då approximativt plant spänningstillstånd antagits råda (A5)-(A6) är skjuvdeformationen γxz ≈ γyz ≈ 0. Detta innebär att mot medelytan vinkelräta och plana tvärsnitt vid obelastat tillstånd antas förbli plana och vinkelräta även under belastning. Införs ett till plattan kopplat cartesiskt koordinatsystem ges punkten A förskjutning av vektorn u = uex+vey+wez.. B z. medelytan vid deformerat tillstånd. u* zθ. w. θ. w z. A. x medelytan vid odeformerat tillstånd. Figur 2.11 Schematisk bild av medellinjens deformation hos en platta då skjuvdeformationen γxz och γyz försummats, varvid mot medellinjen plana tvärsnitt förblir plana. En punkt i xz-planet förskjuts från A till B, vilket medför att förskjutningen sker både i x- och z-led.. Av figuren framgår att förskjutningen i z-led samt vinkel θ är oberoende av z-koordinat, w =w(x, y) och θ =θ(x, y). Förskjutningen u* i x-led ges av u* =z sinθ och således gäller att u*=u*(x, y, z). Små deformationer,ú w ç<< h och úθ ç<< 1 medför att förskjutningskomponenten i x-led och på samma sätt även i y-led kan tecknas enligt nedan där un respektive vn anger förskjutningar av medelytan till följd av normalkrafter i plattans plan. ∂w( x, y ) ∂x ∂ w x, y ) ( v ( x, y , z ) = v n + v * = v n ( x, y ) − z ∂y. u ( x, y , z ) = u n + u * = u n ( x , y ) − z. 26. (2.66).
(35) 2.5.3 Konstitutiva ekvationer Inledningsvis i avsnitt 2.5 definierades tunn platta som en kropp vars tjocklek är mycket mindre än dess övriga dimensioner, längd och bredd, dvs att h<<L, B. Vidare gjordes antagande att spänningen tvärs plattan (z-riktningen) är mycket mindre än spänningarna i plattans plan úσzz ç<<úσxx ç,úσyy samt att skjuvspänningarna på plattans ovan och undersida är noll, dvs att τxz ≈ τyz ≈ 0 då z = ±½h. Då plattan är tunn antas att dessa spänningars variation genom plattans tjocklek är minimal vilket leder till ett generellt antagandet att dessa spänningskomponenter överallt kan försummas. Således antas överallt i plattan råda plant spänningstillstånd σzz =τxz =τyz = 0. Hookes lag (2.55) med (2.58) reduceras till 1 (σ xx − ν xy σ yy ) Ex 1 (σ yy − λν xy σ xx ) ε yy = Ey 1 (λν xz σ xx + ν yz σ yy ) ε zz = − Ey ε xx =. γ xy =. τ xy G xy. γ xz = 0. (2.67). γ yz = 0. vilket inverterat ger spänningar som funktion av töjningar. σ xx = σ yy. E x (ε xx + λν xy ε yy ). (1 − λν ) λE (ν ε + ε ) = (1 − λν ) 2 xy. x. yy. 2 xy. σ zz = 0. där kvoten λ =. xy xx. Ey Ex. τ xy = G xy γ xy τ xz = 0. (2.68). τ yz = 0. införts och skjuvmodulen G xy =. λE x (1 + λ + 2 λν xy ) föreslagits gälla [1].. 2.5.4 Randvillkor. Lösning till bucklingsproblemet fås genom att kombinera jämvikt, deformationer och konstitutiva samband samt formulera en lämplig ansats på förskjutningen w(x,y) i z-led. Lösningen ska uppfylla plattekvationen samt kinematiska och naturliga randvillkor, förskjutningar och anbringade laster längs plattans ränder.. Allmänt gäller att förskjutning hindras av en mot rörelsen verkande kraft och att rotationer på motsvarande sätt förhindras av mot rotationen verkande moment. Alltså måste längs varje rand anges två villkor. I följande avsnitt redogörs för några av de vanligast förekommande villkoren: fast inspänd, fritt upplagd och helt fri kant. Längs en fast inspänd kant är förskjutningen w och rotationen θ =∂w/∂x (ϕ =∂w/∂y) noll. För en kant som är fritt upplagd gäller att förskjutningen w är noll däremot kan den rotera fritt längs kanten vilket innebär att böjmomentet per längd mx (allt. my ) här är noll, se figur 2.12a.. 27.
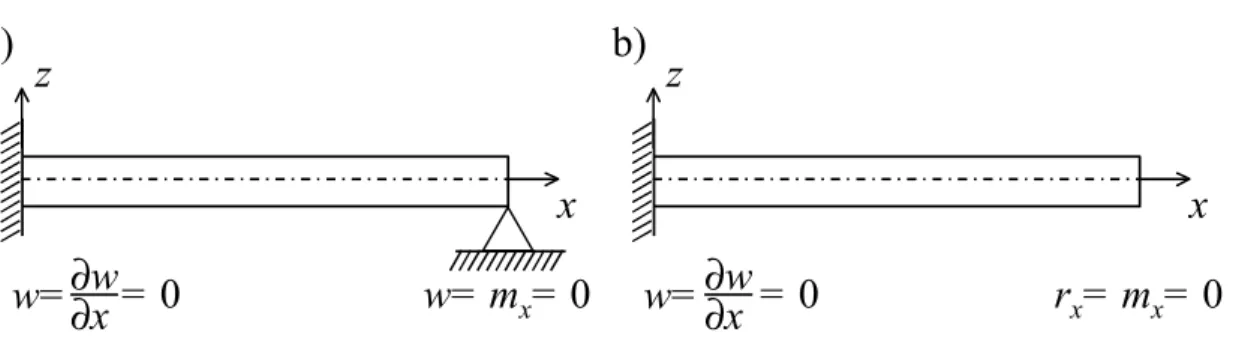
(36) Då kanten är helt fri är tvärkrafter, böjmomentet och torsionsmoment (samtliga per längd) tx , mx , mxy alt. ty , my , myx noll. Detta är ett randvillkor för mycket, vilket löses genom att införa s.k. resulterande tvärkrafter per längd rx och ry vilka ska vara noll längs den fria kanten, se högra änden i figur 2.12b. De resulterande tvärkrafterna ersätter således de två villkoren avseende tvärkraften och torsionsmomentet längs kanten.. a). b). z. z. x ∂w = 0 w= ∂x. x =0 w= ∂w ∂x. w= mx= 0. rx= mx= 0. Figur 2.12 Vänstra änden i figurerna visar randvillkor som gäller vid fast inspänd kant. Högra änden i a) visar randvilkor som gäller vid fritt upplaggd kant och i b) visas randvillkor då kanten är helt fri.. En härledning och förklaring av den resulterande tvärkraften fås genom följande fysikaliska modell, åskådliggjord i figur 2.13 nedan. Betrakta en del av plattans snittyta som indelats i n stycken ytor vardera med längden ∆ξ. På respektive delyta verkar kraften ∆T tvärs plattan utbredning samt ett vridande moment ∆M. Momentet kan ses som en konsekvens av ett på delytan verkande ekvimoment kraftpar ∆M = F ∆ξ.. ∆Ti ∆Mi. ξ−∆ξ ξi ξ ∆Ti . 2. Fi. ∆Ti . 2. ∆Tj ∆Mi. ξj ξ+∆ξ ∆Tj . 2. Fi. ξ Fj. ∆Tj . 2. Fj. Figur 2.13 Fysikalisk modell av tvärkraften i snittet mellan ytorna i och j, ½( ∆Ti + ∆Tj ) +Fi - Fj där nettobidraget Fi - Fj till totala kraften antas uppkomma på grund av ekvimomenta kraftpars verkan.. 28.
Figure
+7
Related documents
Bestäm samtliga krafter som verkar på lådan precis innan den börjar glida och bestäm vilofriktionstalet för låda/golv.. JF10 En marmeladburk med massan 0,67 kg står på
nedbromsning av dess nedre gummiklädda del mot markeringens yta. Vid mätning med den handskjutna friktionsmätaren sker kalibrering innan instrumentet förs ut till
Rapport: Laborationen skall redovisas genom att frågorna i detta labb-PM besvaras och lämnas in till läraren för godkännande.. För betyg C krävs slutsatser, kommentarer
Tidningen fortsätter med att beskriva hur Marcus fortfarande spelar fotboll, men som nu menar att “Det är en skön grabbgrej att ha, vi som spelar för att umgås” (King 2012 s
Man skulle kunna beskriva det som att den information Johan Norman förmedlar till de andra är ofullständig (om detta sker medvetet eller omedvetet kan inte jag ta ställning
Dessa delsekvenser (a1.1, a1.2 osv., samt b1.1, b2.1 osv.) innehåller data där en grupp elever börjar och avslutar sin redovisning eller där ett samtal påbörjas om
Figurerna 35 – 38 visar hur utgångsfuktkvoten förändras vid olika mäldtemperaturer under ett pressnings tryck på 37.5 MPa för inkommande fuktkvot från olika
För ytvikt på 0,02 kg/m 2 som är ganska lågt värde på ytvikten i olika vakuum nivåer, ser man att oavsett hur stor vakuumtrycksnivån är, blir avvattningen väldigt stor
