Metoder för att bedöma synavstånd
för vägmarkeringar
Carina Fors
Sven-Olof Lundkvist
VTI notat 24-2018 |Metoder för att bedöma synavstånd för vägmark
Utgivningsår 2018
www.vti.se/vti/publikationerVTI notat 24-2018
VTI notat 24-2018
Metoder för att bedöma synavstånd för
vägmarkeringar
Carina Fors
Sven-Olof Lundkvist
Författare: Carina Fors, VTI, www.orcid.org/0000-0002-2061-5817
Sven-Olof Lundkvist, VTI Diarienummer: 2015/0662-8.2 Publikation: VTI notat 24-2018
Omslagsbilder: Lightpoet och Linnea Borg/Mostphotos Utgiven av VTI, 2018
Förord
Föreliggande rapport beskriver en metodstudie med syfte att ta fram en metod för att bedöma
längsgående vägmarkeringars synavstånd i fordonsbelysning. Metoden ska användas i en kommande studie för att validera beräkningsmodellen Visibility, som nyligen har reviderats.
Avsikten var initialt att genom några enkla tester fastslå vilken metod som ska användas i den kommande valideringsstudien. De enkla testerna (vilka redovisas i kapitel 3.1) gav dock svårtolkade resultat, där det inte tycktes finnas något samband alls mellan markeringens retroreflexion och dess synbarhet. Vidare var flera av de testade metoderna behäftade med praktiska problem. Det blev därför nödvändigt att genomföra en metodstudie där olika metoder har testats och undersökts närmare i en serie mindre försök på allmän väg. Genom en stegvis process har en metod möjlig att använda för att validera Visibility tagits fram.
Tack till de statliga vägmyndigheterna i Sverige, Norge, Danmark och Finland som via nätverket
Nordiskt Möte för Förbättrad Vägutrustning (NMF) har finansierat studien.
Tack även till Martin Gunnarsson samt följande personer vid VTI som har medverkat i studien som försökspersoner: Sara Nygårdhs, Mohammed-Reza Yahya, Gunilla Sörensen, Jonas Ihlström, Erik Kjellman, Andreas Jansson och Erik Olsson. Planeringen och genomförandet av testerna har i huvudsak gjorts av Sven-Olof Lundkvist och undertecknad.
Linköping, oktober 2018
Carina Fors Projektledare
Kvalitetsgranskning
Intern peer review har genomförts 28 november 2018 av Björn Lidestam. Carina Fors har genomfört justeringar av slutligt rapportmanus. Forskningschef Anna Anund har därefter granskat och godkänt publikationen för publicering 5 december 2018. De slutsatser och rekommendationer som uttrycks är författarnas egna och speglar inte nödvändigtvis myndigheten VTI:s uppfattning.
Quality review
Internal peer review was performed on 28 November 2018 by Björn Lidestam. Carina Fors has made alterations to the final manuscript of the report. The research director Anna Anund examined and approved the report for publication on 5 December 2018. The conclusions and recommendations expressed are the author’s and do not necessarily reflect VTI’s opinion as an authority.
Innehållsförteckning
Sammanfattning ...7 Summary ...8 1. Inledning ...9 1.1. Bakgrund ...9 1.2. Syfte ...10 2. Litteraturstudie ...11 2.1. Metod ...112.2. Metoder för att undersöka synbarhet hos vägmarkeringar – en litteraturgenomgång ...11
2.3. Diskussion ...14
3. Metodtester ...15
3.1. Inledande metodtester ...15
3.1.1. Metoder och testbetingelser ...15
3.1.2. Resultat och diskussion ...16
3.2. Kravspecifikation ...18 3.3. Val av metoder ...19 3.3.1. Reflektormetoden ...19 3.3.2. Kantstolpsmetoden ...19 3.4. Metodtester, del 1 ...19 3.4.1. Test av reflektormetoden ...20 3.4.2. Test av kantstolpsmetoden ...24
3.4.3. Jämförelse av reflektormetoden och kantstolpsmetoden ...30
3.4.4. Sammanfattning och slutsatser, del 1 ...31
3.5. Metodtester, del 2 ...32
3.5.1. Bedömning av synavstånd i stillastående och i fart ...32
3.5.2. Fortsatta tester ...34
3.5.3. Bedömning av synavstånd med ögonrörelsesystem ...37
3.5.4. Sammanfattning och slutsatser, del 2 ...39
4. Föreslagen metod för att bedöma vägmarkeringars synavstånd ...41
5. Diskussion och slutsatser ...42
5.1. Metodtester...42
5.2. Framtida valideringsstudie ...43
5.3. Slutsatser ...44
Sammanfattning
Metoder för att bedöma synavstånd för vägmarkeringar
av Carina Fors (VTI) och Sven-Olof Lundkvist (VTI)
Studien syftade till att ta fram en metod för att bedöma längsgående vägmarkeringars synavstånd i fordonsbelysning. Metoden ska användas i en kommande studie för att validera en beräkningsmodell, benämnd Visibility, som nyligen har reviderats. Med modellen beräknas vägmarkeringars synavstånd utifrån olika parametrar, bland annat retroreflexion och area.
Studien omfattade en litteraturgenomgång och en serie metodtester i fält. Utifrån
litteraturgenomgången och ett fåtal små inledande fälttester togs en kravspecifikation fram. Två metoder, benämnda reflektormetoden respektive kantstolpsmetoden, bedömdes kunna uppfylla
kravspecifikationen och de fortsatta testerna inriktades därför på dessa metoder. Reflektormetoden går ut på att vägbanereflektorer placeras intill vägmarkeringen med ett visst avstånd. Bedömningen av synavstånd görs stillastående, genom att ange hur långt vägmarkeringen syns, uttryckt i antal reflektorer. Med kantstolpsmetoden används istället kantstolparnas reflektorer som referenspunkter och vägmarkeringens synavstånd anges därmed i antal kantstolpsreflektorer. Bedömningen görs i fart och observatören bedömer vägmarkeringens synavstånd kontinuerligt över en längre sträcka. Båda metoderna fungerade bra rent praktiskt och upplevdes ge rimliga resultat när de testades var för sig. En jämförelse av metoderna visade dock att de gav väsentligt olika resultat. Orsaken till detta har inte helt klarlagts. Vid ytterligare tester, på väg med intermittenta kantmarkeringar, bedömdes synavstånden genom att räkna antalet synliga markeringar med hjälp av kikare. Denna metod antas ge det mest ”sanna” värdet och den indikerade att kantstolpsmetoden tenderar att överskatta synavstånden, medan reflektormetoden tenderar att underskatta synavstånden något om reflektorerna är placerade nära vägmarkeringen. Att göra bedömningen i stillastående jämfört med i fart hade inte någon väsentlig inverkan på resultatet (synavstånden blev något kortare i fart), men det upplevdes vara svårare att göra en noggrann bedömning i fart.
Utöver reflektormetoden och kantstolpsmetoden undersöktes också om det skulle gå att använda ett ögonrörelsesystem för att bedöma synavstånd. Resultaten visade att noggrannheten och bildkvaliteten inte var tillräckligt bra för att metoden ska gå att använda.
Slutlig rekommendationen för den kommande valideringsstudien är att använda reflektormetoden, där reflektorerna är placerade med 18 m avstånd och 40 cm från markeringen. Bedömningen ska göras stillastående och upprepade gånger på varje mätobjekt. Vid några objekt (med intermittenta markeringar) bör bedömningen av synavstånd även göras genom att räkna antalet synliga kantmarkeringar med kikare, för att verifiera resultaten som erhålls från reflektormetoden.
Summary
Methods for estimation of the visibility distance of road markings
by Carina Fors (VTI) and Sven-Olof Lundkvist (VTI)
The study aimed at developing a method for estimation of the visibility distance of longitudinal road markings in headlight illumination. The method will be used in a forthcoming study to validate a mathematical model, denoted Visibility, that was recently revised. With this model, the visibility distance of road markings can be calculated from various parameters, such as retroreflectivity and area.
The study included a literature review and a series of tests on public roads. Based on the literature review and a few minor field tests, a requirement specification was prepared. Two methods, denoted
the reflector method and the post delineator method, respectively, were assumed to have the potential
to fulfil the requirements and were further tested. In the reflector method, reflective road studs are placed along the road marking at a known distance between them. The estimation of visibility distance is done at standstill, by indicating the distance at which the marking is visible, expressed as the number of reflectors. In the post delineator method, the retroreflectors of post delineators are used as reference points instead of road studs and accordingly, the visibility distance is expressed in number of post delineator reflectors. The estimation is done at speed and the observer is continuously estimating the visibility distance while the vehicle is moving. Both methods worked well from a practical point of view and both also seemed to give reasonable results. However, when compared, it was clear that they gave substantially different results. The reason behind this has not been completely clarified. Further tests on a road with broken edge lines, the visibility distances were estimated by calculating the number of visible road markings by using binoculars, which is assumed to give the most “true” estimation. This method indicated that the post delineator method overestimates the visibility distances, while the reflector method may underestimate the visibility distance, if the road studs are placed close to the road marking. Estimating the visibility distance at standstill compared to at speed, did not have a substantial influence on the result, (the visibility distances were somewhat shorter at speed) however, the participants thought it was more difficult to make accurate estimations at speed. In addition to the reflector method and the post delineator method, the potential to use an eye tracking system for estimation of visibility distance was assessed. The results showed that the accuracy and the image quality were too low for this application.
The final recommendation for the forthcoming validation study is to use the reflector method, where the reflectors are placed at a longitudinal distance of 18 m and transverse distance of 0.40 m from the road marking. The estimations should be carried out at standstill and repeatedly for each object. For some objects (with broken road markings), the visibility distance should also be estimated by
calculating the number of visible road markings with binoculars, to verify the results obtained from the reflector method.
1.
Inledning
1.1. Bakgrund
Längsgående vägmarkeringar syftar till att ge fordonsförare en förstärkt synbarhet av vägens
sträckning, samt anvisa var på vägen fordonet ska vara placerat. Funktionskraven på vägmarkeringar omfattar bland annat retroreflexion, som anger hur mycket ljus som reflekteras tillbaka mot föraren när markeringen belyses med fordonsbelysning i mörker. Det vill säga, retroreflexionen är ett mått på hur väl markeringen syns i fordonsbelysning. Avståndet på vilken en markering är synlig påverkas också av dess area och av yttre faktorer såsom fordonsbelysningen, förarens synförmåga och omgivningsljus, till exempel från mötande fordon.
Ur ett trafikantperspektiv vore det önskvärt att formulera funktionskrav baserat på förarens behov av synbarhet. Ett mått som har en tydlig koppling till förarens upplevelse av markeringen är preview-time (pvt) som anger hur långt en markering är synlig, uttryckt i tid givet förarens aktuella hastighet. Om en förare kör i 90 km/h (25 m/s) och markeringen syns 100 m framför bilen är pvt = 100/25 = 4 s. Om man genom forskningsstudier kan fastslå vilken pvt som behövs för att en förare ska kunna köra på ett säkert och komfortabelt sätt kan man, för olika typer av vägar och hastighetsbegränsningar, bestämma vilken retroreflexion och area markeringen behöver ha för att för att kravet på pvt ska vara uppfyllt. På 90-talet genomfördes ett europeiskt samarbetsprojekt, COST 331, som bland annat syftade till att undersöka vilken pvt förare behöver (COST 331, 1999). I en simulatorstudie konstaterades att pvt måste vara minst 1,8 s för att föraren ska klara av att styra bilen längs vägen, och i en efterföljande fältstudie drogs slutsatsen att pvt = 2,2 s är för kort för komfortabel körning i verklig trafik. I projektet togs även en beräkningsmodell, benämnd Visibility, fram, för beräkning av vägmarkeringars
synavstånd utifrån uppmätta värden på bland annat retroreflexion och markeringens area.
Inom nätverket Nordiskt Möte för Förbättrad Vägutrustning (NMF) har ett projektförslag som syftar till fortsatta studier av förares behov av pvt diskuterats. Vid ett mindre pilotförsök1 hösten 2014
noterades att synavstånden som erhålls från beräkningsmodellen Visibility underskattas. Tänkbara förklaringar till skillnaden mellan uppmätta och beräknade synavstånd är:
1. Fordonsbelysningen kan ha förbättrats sedan 90-talet, då Visibility togs fram.
2. Metoden som användes i COST 331 för att validera Visibility kan underskatta synavstånden. 3. Visibility level (VL, som är ett tröskelvärde för vad som anses vara synligt och som ingår som
en parameter i Visibility) ska sannolikt vara väsentligt lägre än det värde som används i
Visibility, då trafiksituationen kan betraktas som enkel (ingen mötande trafik etc.).
Resultaten från pilotförsöket ledde till att NMF tog initiativ till en revidering och validering av
Visibility. I ett första steg uppdaterades modellen för fordonsbelysning genom att belysningen på ett
urval av idag vanligt förekommande personbilar mättes upp (vilket bekräftade antagandet i punkt 1 ovan). Vidare moderniserades själva programvaran. I den uppdaterade versionen är det möjligt för användaren att ange ett valfritt värde på VL, vilket gör att modellen får en större flexibilitet och därmed går att anpassa bättre efter olika betingelser.
Innan den uppdaterade versionen av Visibility kan användas i fortsatta studier om pvt, behöver den valideras. I praktiken innebär detta att bestämma värden på VL för olika trafiksituationer, så att modellen så bra som möjligt stämmer överens med uppmätta synavstånd. För att kunna göra detta krävs en tillförlitlig metod för att mäta synavstånd i fält.
Valideringen av den ursprungliga versionen av Visibility gjordes i ett fältförsök, där olika typer av längsgående vägmarkeringar lades ut i mitten av det ena körfältet på en tvåfältsväg (allmän väg) med stort avstånd mellan varje typ. Sammanlagt nio försökspersoner satt som passagerare i en personbil på sträckan, med enda uppgift att trycka på en knapp så fort de såg en ny vägmarkering. Resultaten visade på en mycket god överensstämmelse mellan de uppmätta synavstånden och de beräknade
synavstånden, då parametern VL sattes till 7,2. Dock sattes sedan VL i programmet Visibility till 10, med tanken att det ska avspegla en svårare trafiksituation.
Metoden som användes i fältförsöket kan möjligen vara en delförklaring till varför Visibility
underskattar synavstånden. I försöket mättes synavståndet till en punkt där markeringen börjar, medan man i verklig körning ser markeringen till en punkt där den upplevs sluta, det vill säga inte längre är synlig. För att kunna se den punkt där en markering börjar (en punkt som befinner sig 50–250 m bort) behöver man se markeringen bortom punkten. Eftersom det handlar om förhållandevis långa
synavstånd behöver man sannolikt se åtminstone någon eller några tiotals meter av markeringen. Det vill säga, det verkliga synavståndet (så som det upplevs i en körsituation) är sannolikt några tiotals meter längre än vad som uppmätts.
1.2. Syfte
Syftet med föreliggande studie är att ta fram en ekologiskt valid metod för att bedöma längsgående vägmarkeringars synavstånd i fordonsbelysning. Detta innebär att metoden så långt det är möjligt ska ge resultat som avspeglar vägmarkeringars synavstånd så som de upplevs i verkliga körsituationer. Studien omfattar en litteraturgenomgång och metodtester i fält.
2.
Litteraturstudie
2.1. Metod
En litteratursökning gjordes med hjälp av sökverktyget Summon, som tillhandahålls av Bibliotek och
informationscenter (BIC) vid VTI. Summon ger tillgång till:
• Alla referenser i litteraturdatabaserna Scopus och Web of Science • Samtliga e-tidskrifter som VTI prenumererar på
• Beståndet vid VTI:s bibliotek • Open Access-tidskrifter
Sökord var road marking visibility. Från de 60 första sökträffarna valdes 12 referenser ut att ingå i litteraturgenomgången. Det huvudsakliga urvalskriteriet var att referensen skulle inkludera någon form av experimentellt synbarhetsförsök, med syfte att skatta synbarhet hos vägmarkeringar.
Litteraturgenomgången genomfördes under 2016.
2.2. Metoder för att undersöka synbarhet hos vägmarkeringar – en
litteraturgenomgång
I litteraturen förekommer i huvudsak två metoder för att bedöma vägmarkeringars synavstånd. Metoderna benämns nedan Metod I och Metod II.
Metod I innebär att försöksdeltagarna sitter i ett stillastående fordon på en testbana. Markeringarna utgörs av intermittenta linjer med ca 3 m långa markeringar och ca 9 m långa mellanrum. Deltagarnas uppgift är att räkna antalet markeringar de med säkerhet kan se, inom en viss tid. Burns et al (2006) använde metoden för att undersöka sambandet mellan markeringars fotometriska egenskaper och deras synbarhet i torrt och vått väglag, samt i regn. Utöver att bedöma synavstånden genom att räkna antalet synliga markeringar fick deltagarna även bedöma synbarheten på en tregradig skala, där 1 =
oacceptabel, 2 = acceptabel och 3 = mycket bra. Resultaten påvisade ett tydligt logaritmiskt samband mellan synavstånd och retroreflexion (där retroreflexionen var 30–1000 mcd/m2/lx). Metoden
användes även i Gibbons et al. (2005) där syftet var att undersöka vilken retroreflexion förare behöver i vått väder. Studien genomfördes på en testbana med möjlighet att simulera regn, där markeringar av olika typ lades ut bredvid varandra. Försöksdeltagarna satt i antingen en personbil eller en lastbil och observerade markeringarna genom en 5 cm bred spalt, för att de bara skulle se en av testmarkeringarna i taget. I slutet av experimentet fick deltagarna se alla markeringar samtidigt, och rangordna deras synbarhet. Resultaten visade att det var en hög korrelation mellan synavstånd och retroreflexion. I Metod II färdas försöksdeltagarna i ett fordon längs med en väg. I de flesta studier var det
försökspersonen själv som körde. Vägmarkeringarna upphör och börjar sedan igen, vid vissa punkter längs med vägen. Luckorna i markeringarna åstadkoms antingen genom att markeringen döljs med mörkt material eller genom att ingen markering har applicerats. I de fall luckornas längd specificerats i artiklarna är de minst 60 m långa och i vissa fall över 200 m. Försöksdeltagarnas uppgift är att säga till när de ser slutet och/eller början av markeringarna. En försöksledare i bilen trycker då på en knapp och gör sedan återigen en knapptryckning när början/slutet av markeringen passeras, vilket ger en
registrering av synavståndet. I de flesta studier upprepas mätningarna med samma försöksperson, antingen genom att samma försöksslinga körs flera gånger, eller genom att samma markeringstyp förekommer på flera platser längs försöksslingan.
Zwahlen och Schnell (1997a) använde Metod II för att mäta synavstånd till både mittlinjer och kantlinjer, med olika färg, bredd och retroreflexion. Studien gjordes på en testbana i torrt väglag i halvljus. Försökspersonerna körde en personbil i 8–16 km/h längs med testbanan och indikerade när de såg slutet av markeringen. Varje försöksperson gjorde upprepade bedömningar i varje betingelse. Vissa inlärningseffekter mellan upprepningarna noterades. Zwahlen och Schnell (1999) använde samma metod i ytterligare en studie, där syftet var att undersöka synavståndet för olika typer av markeringar, i både hel- och halvljus, och med både unga och äldre förare. Synavstånden varierade mellan ca 30 och 240 m. Skillnaderna mellan hel- och halvljus var små – som mest ca 10 % (noteras bör dock att studien är från 1999), vilket av författarna förklaras med att halvljusets ljusfördelning är fördelaktig när det gäller att upptäcka kantlinjen (Zwahlen och Schnell, 1999). Liksom i Zwahlen & Schnell (1997a) noterades vissa inlärningseffekter, vilket gjorde att endast de två sista mätningarna (av tre) analyserades.
En variant av Metod II användes i COST-projektet, för att bestämma parametern Visibility Level (VL) i Visibility-modellen (COST 331, 1999). På en allmän väg applicerades cirka 75 m långa markeringar i mitten av körfältet, med ett mellanrum om minst 200 m mellan närliggande markeringar.
Markeringarna hade olika design med avseende på bredd och intermittens, samt olika retroreflexion, och de hade därmed olika synavstånd. Totalt ingick åtta typer av markeringar, som upprepades på försökssträckan sex gånger vardera. Tre observatörer i taget, totalt nio stycken, satt som passagerare i en bil som kördes i 90 km/h. Observatörernas uppgift var att trycka på en knapp när de kunde se testmarkeringarna, det vill säga när de såg början av markeringen. Experimentet genomfördes i torrt väglag, med tre olika typer av strålkastare. De uppmätta synavstånden varierade från cirka 40 till 250 m.
Gibbons et al. (2007) använde Metod II för att undersöka synbarheten hos fyra olika
vägmarkeringsmaterial i simulerat regn, på en testbana, i olika betingelser (med/utan vägbelysning, med/utan bländning, i personbil och i lastbil). Deltagarna körde längs testbanan och deras uppgift var att indikera både när de såg början och slutet på markeringarna. Mellanrummen mellan markeringarna skapades genom att markeringarna doldes under ett svart material och de placerades på olika platser i olika betingelser och upprepningar. För att deltagarna inte enbart skulle ha fokus på markeringarna utan även titta på vägen, användes en sekundäruppgift som gick ut på att upptäcka koner som var placerade i vägmiljön.
Metod II användes även i Gibbons et al. (2013), där syftet var att undersöka synbarheten hos sex markeringstyper i naturligt regn. Studien genomfördes på en allmän väg, där markeringarna på vissa sträckor doldes av ett svart material. Synavstånden mättes genom att deltagarna indikerade när de såg antingen slutet eller början av en markering. Deltagarnas syn testades innan försöket med avseende på synskärpa, kontrastkänslighet och färgseende.
Ohme och Schnell (2001) använde Metod II för att undersöka hur materialtyp och markeringsbredd påverkar synbarheten. Experimentet genomfördes på en allmän tvåfältsväg, där det fanns 60 m långa luckor i markeringarna. Deltagarna körde längs teststräckan i cirka 16 km/h och indikerade när de såg slutet på markeringarna. Resultaten visade att markeringarnas bredd (10, 15 respektive 20 cm) inte hade någon betydelse för synavståndet men däremot fanns det en effekt av materialtyp.
Schnell et al. (2003) undersökte synavstånd för olika markeringstyper i torrt, vått och regnigt väglag på en testbana, i två bilar med olika typ av strålkastare. Deltagarna körde längs testbanan och indikerade när de kunde se slutet av kantlinjen. Markeringarna var i den torra betingelsen ca 200 m långa och i den våta ca 150 m långa följda av 80–150 m långa luckor. Studien påvisade en korrelation mellan synavstånd och retroreflexion uppmätt med handhållna instrument.
Tabell 1. Sammanfattning av studier där Metod I eller Metod II använts.
Metod, referens Betingelser Synavstånd
(m) Kommentar Metod I Testbana (Burns et al., 2006) Halvljus Torrt, vått, regn Personbil Olika material-/markeringstyper 40–100 Metod I Testbana (Gibbons et al., 2005) Förmodligen halvljus Torrt, vått, regn Personbil, lastbil Olika material-/markeringstyper 25–135 Metod II – slutet av markeringen Testbana, 8–16 km/h
(Zwahlen och Schnell, 1997a)
Halvljus Torrt Personbil Olika material-/markeringstyper 50–210 De längsta synavstånden avser högreflekterande material (RL ca 500). Metod II – slutet av markeringen Testbana, 8–16 km/h
(Zwahlen och Schnell, 1997a)
Halvljus, helljus Torrt Personbil Olika material-/markeringstyper 30–250 De längsta synavstånden avser högreflekterande material (RL ca 700). Metod II – början av markeringen Allmän väg, 90 km/h (COST 331, 1999)
Halvljus, halvljus + två varianter av dimljus
Torrt väglag
Olika material-/markeringstyper
40–250 Försökspersonerna satt som passagerare i bilen, i både fram- och baksäte. Metod II – början och slutet av
markeringen
Testbana, okänd hastighet
(Gibbons et al., 2007) Förmodligen halvljus Regn Personbil, lastbil Olika material-/markeringstyper Vägbelysning/ej vägbelysning Bländning/ej bländning
15–75 Okänt hur fort försökspersonerna körde.
Metod II – början och slutet av markeringen
Allmän väg, okänd hastighet
(Gibbons et al., 2013)
Halvljus Regn Personbil
Olika material-/markeringstyper
25–55 Okänt hur fort försökspersonerna körde.
Metod II – slutet av markeringen Allmän väg, 16 km/h
(Ohme och Schnell, 2001)
En annan typ av studier som är värd att nämna, trots att de endast indirekt berör vägmarkeringars synavstånd, är blickbeteendestudier. Zwahlen och Schnell (1997b) undersökte förares blickbeteende i relation till två olika typer av vägmarkeringar: dels helt nya vägmarkeringar bestående av både mittlinje och kantlinje, dels en tillfällig vägmarkering med låg synbarhet, applicerad endast längs med mittlinjen. Det longitudinella fixationsavståndet (dvs. det avstånd på vilket föraren fäster blicken) var längre i betingelsen med bra vägmarkeringar än i den med sämre markeringar. Dock var det ingen skillnad i hastighet mellan betingelserna, det vill säga att hastigheten inte påverkades av markeringens synbarhet. I en senare studie (Schnell & Zwahlen, 1999) var förarna instruerade att köra i 120 km/h, vilket gav samma slutsats om att föraren fixerar blicken längre fram på vägen om markeringarna har bättre synbarhet.
Det kan även nämnas att vissa av studierna som presenteras ovan har legat till grund för utvecklandet av en synbarhetsmodell benämnd CARVE, som kanske kan sägas vara den amerikanska
motsvarigheten till Visibility (Schnell & Zwahlen, 2000). CARVE baseras på ett stort antal mätningar från tidigare fältstudier, där alla mätningar har gjorts på testbana i halvljus och i torrt väglag. De uppmätta avstånden var omkring 50–200 m, beroende på markeringstyp. Schnell och Zwahlen (2000) poängterade att de värden CARVE ger, inte nödvändigtvis stämmer överens med hur en enskild individ upplever synavstånd, dels beroende på skillnader i synförmåga, men också på yttre faktorer såsom bilens position i förhållande till markeringen.
2.3. Diskussion
Elva av de tolv studier som ingick i litteraturstudien, har genomförts av amerikanska forskargrupper. Det bör noteras att regelverken för fordonsbelysningens ljusspridning ser olika ut i USA och i Europa, och resultaten som redovisats ovan med avseende på synavstånd kanske därför inte är helt jämförbara med europeiska förhållanden.
Metoderna som beskrivs ovan har använts i ett flertal studier, men varför just dessa metoder har valts och deras eventuella begränsningar berörs i mycket liten utsträckning. I studierna av Zwahlen & Schnell (1997a; 1999) motiveras valet av metod med meningen ”It was assumed that the end detection
distance is a representative measure of the maximum visibility distance of pavement markings”, utan
ytterligare förklaring. Författarna nämner dock två felkällor hos metoden: när föraren säger sig se slutet av markeringen är det försöksledaren som trycker på en knapp, vilket sker med en viss fördröjning beroende på försöksledarens reaktionstid. Vidare räknas inte avståndet från förarens position till fordonets front in i synavståndet. Dessa felkällor beräknas underskatta synavståndet med 3–5 m (att felet inte blir större beror på att bilen körs sakta, 8–16 km/h). I övriga studier diskuteras eller kommenteras metoden inte alls, vilket begränsar möjligheterna att få en uppfattning om
metodernas tillförlitlighet. Till exempel hade det varit intressant att veta om de två varianter av Metod II som Gibbons et al. (2007) har använt sig av – att låta försökspersonerna bedöma synavstånden både till markeringens slut och början – gav samma resultat. I Gibbons et al. (2007) har resultaten från de två varianterna slagits samman och eventuella skillnader har inte kommenterats.
Det ska dock poängteras att flera av de studier som redovisas i kapitel 2.2 handlar om att jämföra olika typer av markeringar, ibland i olika betingelser, och då kanske det främst är relativa skillnader som är relevanta. Valet av metod är sannolikt av mindre betydelse i den typen av studier, än i studier där man är ute efter att undersöka absoluta synavstånd.
I de flesta studier där man har använt Metod II upprepas mätningarna med samma försöksperson, antingen genom att samma försöksslinga körs flera gånger, eller genom att samma markeringstyp förekommer på flera platser längs försöksslingan. Detta gör att mätningarnas tillförlitlighet ökar. Zwahlen och Schnell (1997a; 1999) har noterat inlärningseffekter vid upprepade mätningar, vilket tyder på att försökspersonerna behöver träna på uppgiften innan de kan göra skattningar av synavstånden med god repeterbarhet.
3.
Metodtester
Metodtesterna genomfördes i tre steg. Inledningsvis gjordes en serie enkla metodtester med en bred och förutsättningslös ansats. Baserat på resultaten och erfarenheterna från de inledande testerna togs en kravspecifikation fram för de metoder som skulle ingå i de fortsatta testerna. I del 1 testades och justerades de metoder som valts ut, huvudsakligen var för sig. I del 2 jämfördes metoderna och vissa kompletterande tester gjordes.
3.1. Inledande metodtester
Utgångspunkten för framtagandet av en metod för att bedöma vägmarkeringars synavstånd var att metoden så långt det är möjligt ska ge resultat som avspeglar vägmarkeringars synavstånd så som de upplevs i verkliga körsituationer (se även kapitel 1.1). I det tidigare projektet COST 331 bedömde försökspersonerna avståndet till den punkt där en markering börjar, vilket antas ge en underskattning av det verkliga synavståndet. De inledande metodtesterna i föreliggande projekt fokuserades därför på att undersöka metoder där man bedömer synavståndet till den punkt där markeringen slutar. En bred ansats valdes, där flera olika metoder prövades i en serie enkla tester. Metoderna valdes både baserat på litteraturstudien, på egna erfarenheter från tidigare studier och från nya idéer som kom upp vid planeringen av testerna.
3.1.1. Metoder och testbetingelser
Sex olika metoder för bedömning av kantmarkeringens synbarhet testades. I de flesta metoderna användes en trippmätare med meterupplösning för att mäta synavståndet, genom att observatören startade trippmätaren vid en viss punkt som beskrivs av respektive metod, och sedan stoppade den när slutet av markeringen passerades. Metoderna som testades var:
• Tygmetoden: Ett 9,5 m långt svart tygstycke placerades på markeringen och förankrades med
små tyngder. Observatören, som färdades i en bil i riktning mot tyget, startade trippmätaren när hen upplevde att markeringen upphörde (dvs. doldes av tyget).
• Hindermetoden: Två olika hinder testades; ett som var 0,4 m högt och ett som var 1,0 m
högt. Båda hindren var ca 0,4 m breda. Hindret placerades på markeringen i upprätt position, så att det skymde markeringen bakom. Observatören, som färdades i en bil i riktning mot hindret, startade trippmätaren när hen upplevde att markeringen upphörde (dvs. doldes av hindret).
• Personmetoden: Metoden fungerade på samma sätt som hindermetoden, med skillnaden att hindret utgjordes av en mörkklädd person. Denna metod skulle kunna vara enklare att använda än hindermetoden, eftersom en person snabbt och lätt kan flytta sig, både mellan olika
positioner och när ett fordon passerar. Dessutom är en person längre (högre) än de hinder som testades.
• En-reflektormetoden: En vägbanereflektor placerades ut på vägrenen intill kantmarkeringen.
Observatören, som färdades i en bil i riktning mot reflektorn, startade trippmätaren när hen upplevde att reflektorn befann sig vid den punkt där kantmarkeringen slutade (dvs. inte längre syntes).
• Markering-upphör-metoden: Metoden testades på en väg med heldragen kantlinje.
Observatören startade trippmätaren när hen upplevde att markeringen övergick till att vara intermittent, vilket den gjorde vid exempelvis busshållplatser och korsningar.
• Kantstolpsmetoden: Metoden förutsätter att vägen har kantstolpar. Observatören satt i en bil
antalet kantstolpar på det avstånd kantmarkeringen var synlig. Stolpräkningen upprepades flera gånger medan bilen färdades framåt.
Samtliga tester gjordes på allmänna vägar i Linköpingstrakten. Tygmetoden, hindermetoden, personmetoden och en-reflektormetoden testades på en mindre väg öster om Skänninge, där kantmarkeringen var intermittent, 10 cm bred och hade en retroreflexion på ca 230 mcd/m2/lx.
En-reflektormetoden testades även på en väg i närheten av Bjälbo, där kantmarkeringen var av samma typ som på vägen öster om Skänninge, men där retroreflexionen var lägre, ca 183 mcd/m2/lx.
Markering-upphör-metoden testades på väg 206, där kantmarkeringen var 10 cm bred och heldragen
(retroreflexion ca 165 mcd/m2/lx). Kantstolpsmetoden testades på tre stycken 2+1-vägar: väg 23/34
(två sträckor) och väg 50, som hade retroreflexion ca 50, 210 respektive 140 mcd/m2/lx.
Kantmarkeringen var heldragen, antingen 20 eller 30 cm bred.
Tre personer medverkade vid testerna och de turades om att vara observatör. Samtliga bedömningar av kantmarkeringarnas synavstånd gjordes i helljus utan mötande trafik.
3.1.2. Resultat och diskussion
De metoder som fungerade bäst var en-reflektormetoden och kantstolpsmetoden. De var praktiskt genomförbara och bedömdes kunna ge rimliga uppskattningar av synavstånden. På vägar med långa synavstånd, omkring 300 m, upplevdes det dock vara svårt att göra korrekta bedömningar, både med en-reflektormetoden och med kantstolpsmetoden. En fördel med kantstolpsmetoden var att
synavståndet beräknades som ett medelvärde över en längre sträcka, vilket minskade känsligheten för påverkande faktorer såsom väggeometrin. Ett möjligt problem som identifierades var att avståndet mellan stolparna inte alltid är konstant, exempelvis beroende på korsningar och räcken.
De metoder som innebar att markeringen doldes vid en viss punkt fungerade dåligt rent praktiskt. Tyget som användes i tygmetoden blåste iväg varje gång ett fordon passerade, trots att flera tyngder var placerade på tyget. Hindren och personen som användes i hindermetoden respektive
personmetoden var för smala för att skymma tillräckligt mycket av markeringen, särskilt på långa avstånd. Hindren behövde dessutom stå en bit ut i körbanan för att skymma markeringen, vilket gör det olämpligt att använda metoden på trafikerade vägar. Vidare var både hindermetoden och personmetoden mycket känsliga för variationer i observationsvinkel, på så sätt att metoderna endast fungerade om vägen var helt plan och rak och om observatörens sidoläge hölls konstant.
Även markering-upphör-metoden fungerade dåligt. Eftersom metoden bygger på att man använder variationer i kantlinjens utformning går det inte att välja försökssträckornas position, utan de är beroende av placeringen av befintliga busshållplatser och korsningar. Detta innebar att synavstånden påverkades av väggeometrin vid dessa platser, såsom kurvor och backkrön. Observatören behövde vara ganska nära punkten där linjen upphörde för att se att den verkligen upphörde. Metoden bedömdes därför underskatta de verkliga synavstånden.
Tabell 2 visar de uppmätta synavstånden i de olika testerna. En-reflektormetoden testades på två vägar med samma typ av kantlinje, men med olika retroreflexion. Synavstånden blev omkring dubbelt så långa på vägen med lägre retroreflexion (183 vs. 230 mcd/m2/lx), vilket indikerar att andra faktorer än
enbart retroreflexionen påverkar synavstånden. Båda vägarna var raka och plana, men sannolikt var det små variationer i väggeometrin som påverkade synavstånden. Detta kunde observeras visuellt i vissa av testerna; små svackor i vägen gjorde att markeringen ”försvann”. Att markeringens synbarhet kan påverkas kraftigt av väggeometrin betyder dels att det kan innebära vissa svårigheter att
genomföra en valideringsstudie (för att validera Visibility) på allmän väg, men också att det kanske inte, i verklig körning, finns ett särskilt starkt samband mellan synbarhet och retroreflexion. Metodtesterna ger inte ett tillräckligt underlag för att fastslå att det förhåller sig så, men det är en viktig frågeställning att ta med inför fortsatta försök. En slutsats som kan dras av metodtesterna är att
man, för att minska påverkan från väggeometrin, bör göra upprepade mätningar över en längre sträcka för att få ett tillförlitligt resultat.
Synavstånden i Tabell 2 anges i intervall, vilka avspeglar olika observatörers bedömningar (ibland samma observatörs upprepade bedömningar). Detta ger en fingervisning om vilken precision man kan förväntas få för uppmätta synavstånd. För kortare avstånd är variationen upp till 30 m och för längre avstånd 50 m eller mer. Tabellen ger också en indikation om att olika metoder kan ge olika resultat. Till exempel skiljer det ca 40 m (genomsnitt) i synavstånd mellan tygmetoden och hindermetoden.
Tabell 2. Uppmätta synavstånd (m) i helljus med de sex olika metoderna, samt beräknade synavstånd med Visibility enligt COST 331.
Metod Mätobjekt Öster om Skänninge Bjälbo Väg 206 Väg 50 Väg 34 Väg 23 Tyg 158–168 Hinder 0,4 110–140 Person 127–158 En-reflektor 155–163 292–384 Markering upphör 15–75 Kantstolpe 300–350 300–360 300 Visibility* 87 82 Ca 115 125 160 65–94
*) Indataparametrar: Observatör 60 år, glare 0, intensity factor 1,0.
Eftersom modellen i Visibility enligt COST 331 motsvarar synbarheten vid reell bilkörning där fordonet är i rörelse, gjordes vissa av testerna både stillastående och i fart. Utifrån de få tester som gjordes upplevdes det inte vara någon egentlig skillnad i synavstånd beroende på om bilen stod stilla eller kördes framåt, men däremot blev uppgiften för observatören svårare om denne både skulle koncentrera sig på att köra och på att utföra synbarhetsuppgiften.
Flera av de testade metoderna gick ut på att låta markeringen ”ta slut” vid en viss punkt, antingen genom att dölja den eller genom att utnyttja befintliga variationer i markeringstyp, och låta
observatören indikera när hen upplevde att markeringens slut kunde ses. Att låta markeringen ”ta slut” ger visserligen en distinkt förändring som borde kunna upptäckas på ett bra sätt, men å andra sidan är inte detta hur markeringar uppfattas vid normal körning. Ett problem är att synavståndet sannolikt riskerar att underskattas, eftersom man måste kunna se en bit bortom markeringen för att kunna avgöra att den slutar. De olika metoderna för att dölja markeringen var dessutom, som nämnts ovan, behäftade med andra problem, och den sammanlagda slutsatsen är att metoder där man låter markeringen ta slut inte fungerar bra.
Ett tydligt resultat från metodtesterna är att det är svårt att bedöma synavstånd på långa avstånd. En berättigad frågeställning här är dock vilka synavstånd som är relevanta för trafikanterna. I COST 331-projektet dras slutsatsen att vägmarkeringars lägsta acceptabla pvt för säker körning är 1,8 s, men att den ska vara mer än 2,2 s för komfortabel körning. I en CIE-rapport (CIE 1988) rekommenderas en minsta pvt på 3 s och en önskvärd pvt på 5 s. En handbok utgiven av Federal Highway Administration
2–3 s avstånd, medan Schnell och Zwahlen (1999a) förespråkar en pvt på 3,65 s. Markeringar som har ett synavstånd på 200 m har i 90 km/h en pvt på 8 s, vilket sannolikt mer än väl uppfyller
trafikanternas behov av visuell ledning. En rimlig slutsats av detta är att den framtida studien för att validera Visibility bör ha sitt huvudsakliga fokus på sträckor där synavståndet är kortare än 200 m. Längre synavstånd än så är inte relevanta att kunna mäta, ur ett trafikantperspektiv.
Resultaten från metodtesterna kan sammanfattas enligt följande:
• En-reflektormetoden och kantstolpsmetoden fungerade bäst och de bör utgöra grund för fortsatta metodtester.
• Små variationer i väggeometrin kan ha stor påverkan på kantmarkeringens synavstånd. Upprepade mätningar kan minska problemet.
• Det är inte relevant (och dessutom svårt) att kunna bedöma synavstånd som är längre än 200 m. Fortsatta metodstudier bör fokuseras på korta avstånd (< 200 m).
• Det kan vara svårt att bedöma avstånd samtidigt som man kör, men det är inte klarlagt huruvida hastigheten påverkar synavstånden och detta bör därför undersökas vidare.
3.2. Kravspecifikation
Utifrån de inledande metodtesterna (kapitel 3.1) samt utifrån praktiska och ekonomiska begränsningar togs följande kravspecifikation fram för de metoder som skulle ingå i studien.
• Eventuell utrustning som placeras på eller vid vägen måste tåla vägmiljön samt att den inte får störa trafiken.
• Metoden ska fungera på synavstånd upp till 150–200 m. Längre avstånd är mindre relevanta, samt mycket svåra att mäta upp med noggrannhet.
• Metoden ska fungera både på intermittenta och heldragna markeringar.
• Metoden ska möjliggöra upprepade mätningar på samma typ av markering, eftersom det ger ett mer tillförlitligt resultat och gör metoden mindre känslig för bland annat väggeometri och variationer i retroreflexion.
• Metoden bör ha hög ekologisk validitet, på så sätt att den bör i så hög grad som möjligt efterlikna en normal körsituation.
• Teststräckorna ska ej behöva förses med avancerad eller dyr utrustning, eftersom det sannolikt krävs många försökssträckor för att få tillförlitliga resultat.
• Metoden ska helst kunna användas på olika vägtyper.
Kravet på att metoden ska fungera på synavstånd på upp till 200 m innebär att markeringarna måste ha förhållandevis dålig synbarhet, om man ska kunna göra bedömningar av synavståndet i helljus. I de inledande metodtesterna skattades synavstånden på vissa sträckor till över 350 m. Markeringarna var av normalt förekommande standard, med bredd och intermittens enligt Trafikverkets riktlinjer, samt slitna i större eller mindre utsträckning, det vill säga en vanlig, genomsnittlig markering har sannolikt för bra synbarhet för att kunna användas i ett försök med helljus där synbarheten får vara max 200 m.
3.3. Val av metoder
Av de inledningsvis testade metoderna (kapitel 3.1) bedömdes endast kantstolpsmetoden och en modifierad reflektormetod, med fler reflektorer, kunna uppfylla kraven i kapitel 3.2. Ingen av metoderna från litteraturstudien uppfyllde kraven.
3.3.1. Reflektormetoden
Reflektormetoden innebär att vägbanereflektorer, placeras ut på lämpligt avstånd längs med kantlinjen, som referenspunkter för bedömningen av synavstånd. Observatören sitter i en stillastående bil med motorn igång vid den första reflektorn, och har till uppgift att räkna antalet reflektorer på den sträcka där vägmarkeringen är synlig. När observatören har räknat körs bilen fram till nästa reflektor och proceduren upprepas för varje reflektor, så länge reflektorerna syns på längre avstånd än
vägmarkeringen. Synavståndet beräknas sedan som ett genomsnitt av observatörens samtliga
skattningar. Reflektormetoden är avsedd att användas på vägar där det saknas kantstolpar och där det inte är så mycket trafik. Den typ av reflektor som användes i studien visas i Figur 1.
Figur 1. Vägbanereflektor. Den reflekterande ytan är ca 9 x 29 mm.
3.3.2. Kantstolpsmetoden
Metoden innebär att observatören sitter i en bil som färdas längs med en väg där det finns kantstolpar. Observatörens uppgift är att kontinuerligt räkna antalet kantstolpar på det avstånd på vilket
vägmarkeringen är synlig. Synavståndet beräknas som ett medelvärde av observatörens skattningar för en längre sträcka. Kantstolpsmetoden kan endast användas där det finns kantstolpar, vilket i Sverige innebär större landsvägar, 2+1-vägar och motorvägar.
Enligt Trafikverkets regelverk som gällde fram till 2002 skulle kantstolpar på landsväg placeras med 60 m avstånd (Vägverket, 1994). År 2002 ändrades detta till 50 m (Vägverket 2002; Vägverket 2004; Trafikverket 2012). År 2015 gjordes ytterligare en revidering då avståndet ändrades till 100 m
(Trafikverket, 2015). I praktiken är avståndet på landsvägar fortfarande ofta 50 m eller 60 m, eftersom man låter befintliga stolpar stå kvar. För motorväg har avståndet mellan kantstolparna sedan länge varit 100 m.
3.4. Metodtester, del 1
De två valda metoderna, reflektormetoden och kantstolpsmetoden, testades för att undersöka följande: • Fungerar metoderna i praktiken?
• Hur ska reflektorerna placeras?
• Vilken hastighet ska fordonet ha i kantstolpsmetoden?
• Skiljer synavstånden mellan skattning i stillastående och skattning i fart för kantstolpsmetoden?
• Vilken upplösning ska väljas för bedömningarna? • Ger metoderna rimliga resultat?
• Ger metoderna samma resultat?
3.4.1. Test av reflektormetoden
Metodtesterna genomfördes i mörker i april och i augusti, på allmän väg. Väglaget var torrt och alla skattningar och bedömningar gjordes när det inte fanns annan trafik i närheten. Vid testerna som gjordes i april användes en Volvo XC70 av årsmodell 2006 och vid testerna som gjordes i augusti användes en Volvo V70 av årsmodell 2011. Under metodtestet satt tre försökspersoner i samma bil: en i förarsätet, en i det främre passagerarsätet och en till höger i baksätet. I april deltog person A, B och C och i augusti deltog person D, E och F. Bilen placerades mitt i körfältet med helljuset på, vid den första reflektorn. Var och en av personerna räknade antalet reflektorer fram till den punkt där de uppfattade att de inte längre kunde se markeringen. Resultatet fördes in i ett protokoll och bilen kördes därefter fram till nästa reflektor, varpå proceduren upprepades. När synavståndet sträckte sig längre än till den bortersta reflektorn avbröts försöket, och hela proceduren upprepades, men med halvljus istället för helljus.
Testerna genomfördes på tre olika vägar i närheten av Linköping:
• Väg 1050: 12 m bred väg med breda vägrenar. Kantlinjen var intermittent, 10 cm bred och hade RL = 86 mcd/m2/lx.
• Väg 1025: 5,5 m bred väg utan mittlinje och med smal vägren. Kantlinjen var intermittent, 10 cm bred och hade RL = 67 mcd/m2/lx.
• Väg 1136: 9 m bred väg. Kantlinjen var heldragen, 10 cm bred och hade RL = 129 mcd/m2/lx.
Både beläggning och vägmarkeringar var nylagda vid mättillfället. De tre försökssträckorna visas i Figur 2.
Figur 2. De tre försökssträckorna. Vänster: väg 1050, mitten: väg 1025, höger: väg 1136. Bilden på väg 1136 är tagen innan vägen fick ny beläggning och nya vägmarkeringar. Bilder: Google Maps.
3.4.1.1. Lateral placering av reflektorerna
Hur reflektorerna ska placeras i förhållande till vägmarkeringen undersöktes inledningsvis på väg 1050 som har en mycket bred vägren. Utifrån en visuell bedömning drogs slutsatsen att det var
lämpligt att placera reflektorerna ungefär 40 cm till höger om kantlinjen. Detta avstånd bedömdes vara tillräckligt litet för att en viss position på markeringen skulle kunna relateras till en viss reflektor och tillräckligt stort för att inte ljuset från reflektorn skulle störa synintrycket av markeringen.
På försökssträckan på väg 1025 var dock vägrenen mycket smal, se Figur 2, vilket inte tillät ett avstånd om 40 cm. Reflektorerna placerades då omkring 15 cm från markeringen. Även detta bedömdes fungera, men här bör nämnas att synavståndet var förhållandevis kort (ca 80–90 m i helljus). Med längre synavstånd och kanske även med fordon med ljusstarkare strålkastare, är det möjligt att ett avstånd om 15 cm kan vara för litet för att inte det reflekterade ljuset från reflektorns ska störa synintrycket av markeringen.
3.4.1.2. Longitudinell placering av reflektorerna
För att undersöka vad som är lämpligt avstånd mellan reflektorerna testades olika alternativ. I ett första test placerades reflektorerna med 6 m avstånd, det vill säga vid varannan markering2 på den
intermittenta kantlinjen på väg 1050. Detta avstånd fungerade bra upp till cirka 50 m synavstånd, men på längre avstånd var det svårt att urskilja enskilda reflektorer. Därefter testades differentierade avstånd, det vill säga olika reflektoravstånd för olika synavstånd. På synavståndet 0–50 m placerades reflektorerna med 6 m avstånd, på synavståndet 50–100 m på 12 m avstånd och på synavståndet 100– 150 m på 18 m avstånd. Med denna placering gick reflektorerna att urskilja utmed hela sträckan, samtidigt som upplösningen inte blev onödigt låg på korta avstånd. En nackdel är dock att det inte är möjligt att göra upprepade bedömningar vid olika positioner längs med sträckan, utan att behöva flytta reflektorerna, vilket skulle vara alltför tidskrävande i ett fältförsök med försökspersoner.
Slutsatsen blev därför att reflektoravståndet bör vara detsamma längs med hela sträckan, och att ett avstånd om 18 m krävs för att det ska vara möjligt att urskilja reflektorerna upp till 150 m synavstånd. Figur 3 visar den slutgiltiga placeringen av reflektorerna med 18 m longitudinellt avstånd och 40 cm från kantlinjen.
Figur 3. Försökssträckan på väg 1050, med reflektorerna placerade med ett lateralt avstånd (till kantmarkeringen) om 40 cm och ett longitudinellt avstånd (till nästa reflektor) om 18 m. Bilden är tagen i helljus. Det reflekterande föremålet bortom sträckan är ett vägmärke av typen X1. Fotograf: Carina Fors, VTI.
3.4.1.3. Bedömning av synavstånd
Kantlinjens synavstånd skattades med reflektormetoden på alla tre försökssträckor, dels för att undersöka om metoden fungerade i praktiken och för att se om den verkade ge rimliga resultat, men också för att om möjligt förfina metoden.
På väg 1050 gjordes totalt sju skattningar i helljus innan synavståndet sträckte sig längre än till den bortersta reflektorn. Samma antal skattningar gjordes i halvljus. Resultatet visas i Tabell 3. De tre personernas skattningar var förhållandevis lika. Individvariationer i synförmåga kan förväntas, men det noterades också att synavståndet ibland påverkades av personens position i bilen. En slutsats av detta är att försökspersoner i ett framtida fältförsök därför bör sitta på förarens plats och att fordonet bör vara placerat i mitten av körfältet.
Det kunde konstateras att punkten där markeringen inte längre kunde ses ibland befann sig mittemellan två reflektorer. Det ansågs därför rimligt att skattningen kan göras i halva
reflektorlängder, vilket framför allt är aktuellt för kortare synavstånd. På längre avstånd är det svårare att bedöma exakt var punkten där markeringen inte längre kan ses befinner sig i förhållande till reflektorerna.
Tabell 3. Kantlinjens synbarhet i antal reflektorlängder, vid upprepad skattning, i hel- och halvljus, på väg 1050. Avståndet mellan reflektorerna var 18 m. Tabellen visar också beräknade synavstånd från modellen Visibility.
Antal reflektorlängder, helljus (7 skattningar)
Antal reflektorlängder, halvljus (7 skattningar)
Person A Person B Person C Person A Person B Person C Medelantal reflektorlängder 5,7 6,3 5,9 4,0 3,6 3,6 Motsvarar synavstånd (m) 103 113 106 72 65 65 Synavstånd enligt Visibility (m) 59 59 59 49 49 49
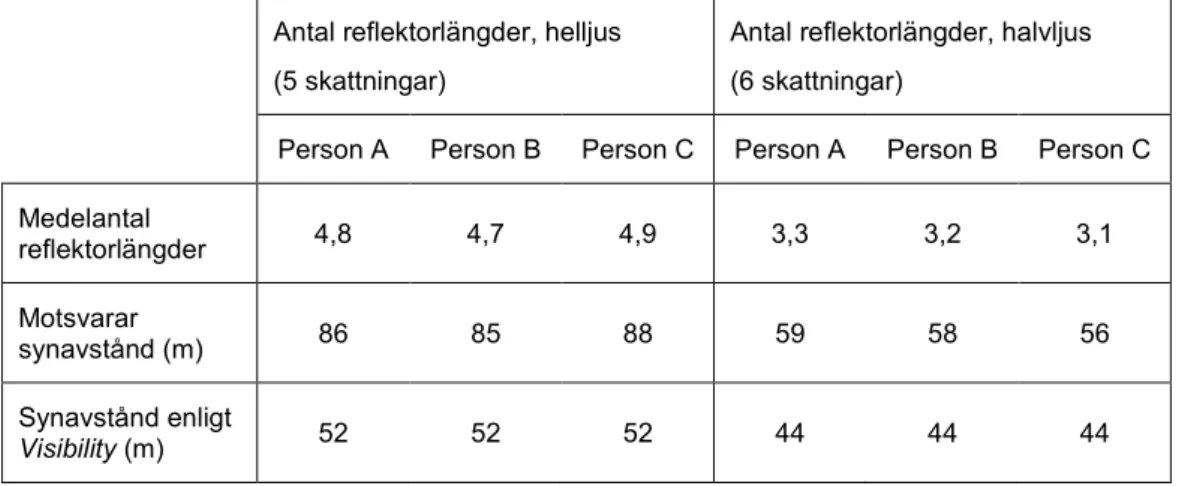
Hela proceduren med att bedöma synavstånd upprepades på väg 1025, med förändringen att där gjordes bedömningarna i halva reflektorlängder. Med helljus kunde fem upprepade skattningar göras och med halvljus sex. Resultatet visas i Tabell 4. Att ange avståndet i halva reflektorlängder upplevdes fungera bra.
Tabell 4. Kantlinjens synbarhet i antal reflektorlängder, vid upprepad skattning, i hel- och halvljus, på väg 1025. Avståndet mellan reflektorerna var 18 m. Tabellen visar också beräknade synavstånd från modellen Visibility.
Antal reflektorlängder, helljus (5 skattningar)
Antal reflektorlängder, halvljus (6 skattningar)
Person A Person B Person C Person A Person B Person C Medelantal reflektorlängder 4,8 4,7 4,9 3,3 3,2 3,1 Motsvarar synavstånd (m) 86 85 88 59 58 56 Synavstånd enligt Visibility (m) 52 52 52 44 44 44
På väg 1136 med heldragen kantlinje gjorde tre försökspersoner 10 observationer i halvljus; i helljus var synavstånden så långa att metoden inte fungerade med avståndet 18 m mellan reflektorerna. För att få ett begrepp om metodens repeterbarhet gjorde varje försöksperson bedömningar i två omgångar. Resultaten sammanfattas i Tabell 5.
Tabell 5. Kantlinjens synbarhet i antal reflektorlängder, vid upprepad skattning, i halvljus, på väg 1136. Avståndet mellan reflektorerna var 18 m. Tabellen visar också beräknade synavstånd från modellen Visibility.
Antal reflektorlängder, omgång 1 (10 skattningar)
Antal reflektorlängder, omgång 2 (10 skattningar)
Person D Person E Person F Person D Person E Person F Medelantal reflektorlängder 5,9 4,8 4,8 5,8 4,6 4,8 Motsvarar synavstånd (m) 106 86 86 104 83 86 Synavstånd enligt Visibility (m) 67 67 67 67 67 67
Utan att göra någon statistisk analys kan man fastställa att repeterbarheten är god. Däremot är
variationen mellan observatörerna stor: person D har ca 25 % längre synavstånd än E och F. Det beror mest sannolikt på skillnader i synförmåga, men det kan möjligen också åtminstone delvis bero på att personerna satt på olika platser i bilen.
Om man jämför synavstånden på väg 1050 med de på väg 1025 kan det noteras att skillnaden i retroreflexion på sträckorna (86 mot 67 mcd/m2/lx) avspeglas i synavstånden. På väg 1050 är de
genomsnittliga synavstånden 107 m (helljus) respektive 67 m (halvljus) medan motsvarande avstånd på väg 1025 är 86 m respektive 58 m. Väg 1136 kan förväntas ha längst synavstånd eftersom kantlinjen är heldragen och har högre retroreflexion (129 mcd/m2/lx) än de andra två vägarna. Det
Tabell 3–Tabell 5 visar också de beräknade synavstånden enligt beräkningsmodellen Visibility. Det kan noteras att de uppmätta avstånden i samtliga fall är betydligt längre än de beräknade. I helljus är de uppmätta avstånden dubbelt så långa eller mer än dubbelt så långa som de beräknade. I halvljus är de uppmätta avstånden omkring 35–40 % längre än de beräknade.
3.4.2. Test av kantstolpsmetoden
Metodtesterna genomfördes i mörker i maj och augusti, på allmän väg. Väglaget var torrt och alla skattningar och bedömningar gjordes när det inte fanns annan trafik i närheten. Fordonet som användes var en Volvo V70 av årsmodell 2011. Tre personer deltog vid varje testtillfälle – i maj person G, H och J och i augusti D, E och F. Vid testerna i maj gjordes bedömningarna av synavstånd i fart från förarplatsen och i stillastående från både framsäte och baksäte (alla försökspersonerna gjorde bedömningarna samtidigt, från den plats där de satt). Vid testerna i augusti, då syftet var att undersöka repeterbarheten, satt en försöksperson i förarsätet, en i det främre passagerarsätet och en till höger i baksätet.
Testerna genomfördes på två vägar i närheten av Linköping:
• Väg 636: 7,5 m bred väg med smal vägren. Kantlinjen var intermittent och 15 cm bred. Retroreflexionen RL varierade från omkring 100 till 155 mcd/m2/lx på de olika delsträckorna
(se nedan). Kantstolparna stod 0,8–1,3 m från kantlinjen. Avståndet mellan stolparna var cirka 60 m.
• Väg 1136: 9 m bred väg. Kantlinjen var heldragen, 10 cm bred och hade RL = 129 mcd/m2/lx.
Både beläggning och vägmarkeringar var nylagda vid mättillfället. Kantstolparna stod cirka 1,5 m från kantlinjen. Avståndet mellan stolparna var ungefär 60 m.
Figur 4 visar de två försökssträckorna.
Figur 4. De två försökssträckorna. Vänster: väg 636, höger: väg 1136. Bilden på väg 1136 är tagen innan vägen fick ny beläggning och nya vägmarkeringar. Bilder: Google Maps.
Försökssträckan på väg 636 delades in i åtta delsträckor, där varje delsträcka var omkring 300–450 m och förhållandevis rak och plan. Medelvärdet för retroreflexionen per delsträcka visas i Tabell 6. Synavståndet bedömdes vara långt, längre än 200 m i helljus, men i brist på alternativa3 sträckor
användes denna sträcka ändå.
3 Totalt identifierades fyra sträckor inom en radie av 30 km från Linköping som uppfyllde kraven i övrigt, det
vill säga tvåfältsväg med kantstolpar, rak och plan väg, ej bred vägren. Av dessa fyra valdes den med lägst retroreflexion.
Tabell 6. Retroreflexion (mcd/m2/lx) för de åtta delsträckorna. Sträcka RL medel (mcd/m2/lx) Sträcka R(mcd/mL medel 2/lx) 1 136 5 150 2 139 6 155 3 120 7 139 4 103 8 145
3.4.2.1. Val av upplösning
I ett första test undersöktes huruvida synavståndet ska anges i hela eller delar av stolplängder. Detta test gjordes stillastående på ett par av delsträckorna av samtliga tre personer i bilen. Den gemensamma uppfattningen var att på avstånd upp till 2 eller möjligen 3 stolplängder, kändes det rimligt att ange synavståndet i stolplängder med en decimal, till exempel 1,3. På längre avstånd är det svårare att ange avståndet med god noggrannhet. Uppfattningen var att halva stolplängder kändes rimligt för längre avstånd.
Slutsatsen av testet var att försökspersonen för enkelhetens skull bör få ange avståndet enligt sin uppfattning, med eller utan decimaler. Det är inte rimligt att ge en instruktion där avståndet ska anges med en viss upplösning för vissa avstånd och med en annan upplösning för andra avstånd. Att ha samma upplösning, till exempel halva stolplängder, för alla avstånd är inte heller en bra lösning, eftersom man då får onödigt låg noggrannhet på korta avstånd.
3.4.2.2. Bedömning i stillastående
Synavståndet bedömdes i stillastående för delsträcka 1–4 av samtliga tre personer i bilen, både i halvljus och i helljus. Bedömningen gick till på samma sätt som med reflektormetoden, det vill säga att bilen stannades vid en kantstolpe, observatörerna gjorde sina bedömningar, och sedan kördes bilen fram till nästa kantstolpe, varpå proceduren upprepades. I halvljus gjordes 4–5 upprepade
bedömningar, och helljus 3–5, beroende på sträckans längd. De angivna stolplängderna räknades om till meter (1 stolplängd = 60 m) och resultatet presenteras som medelvärde, samt minsta och största värde, se Figur 5.
Det kan noteras att de tre personernas bedömningar stämde ganska väl överens. Det går inte att se någon tydlig systematisk skillnad mellan personerna, vilket skulle ha kunnat vara fallet, exempelvis beroende på skillnader i synförmåga eller beroende på att de satt på olika positioner i bilen.
I helljus blev synavstånden långa, mellan 250 och 450 m. Dessa avstånd är längre än vad som är relevant att kunna mäta (se kravspecifikationen i kapitel 3.2), men resultaten redovisas ändå. Det kan noteras att variationen i skattningar (inom varje person) tenderar att bli större i helljus, vilket tyder på att det är svårare att få bra noggrannhet i skattningen på längre avstånd. Det kan dels bero på att det är svårare att se och urskilja stolpar på långt håll, men det är också möjligt att det finns en variation i retroreflexion över sträckan. Ju längre sträckan är, desto högre är sannolikheten att det finns en variation. En annan möjlig förklaring är att det kan finnas små variationer i väggeometrin som påverkar bedömningen.
1 2 3 4 Delsträcka 0 50 100 150 200 250 300 350 400 450 500 Synavstånd (m)
Figur 5. Synavstånd i meter i stillastående, bedömt av de tre personerna G (blå), H (orange) och J (grön) på fyra delsträckor, i halvljus (fyrkanter) och i helljus (trianglar). Markörerna avser medelvärde över 3–5 observationer, felstaplarna avser minsta och största värde.
Figur 6 visar skattade synavstånd och genomsnittlig retroreflexion för de fyra delsträckorna. I halvljus finns möjligen en tendens till längre synavstånd då retroreflexionen ökar, medan inget sådant samband kan noteras för helljus. Där tycks det vara andra faktorer som avgör synavståndet.
100 110 120 130 140 150 Retroreflexion (mcd/m 2/lx) 50 60 70 80 90 100 Synavstånd (m) Halvljus 100 110 120 130 140 150 Retroreflexion (mcd/m 2/lx) 200 250 300 350 400 450 Synavstånd (m) Helljus
Figur 6. Skattade synavstånd (i stillastående) och retroreflexion för delsträcka 1–4. Vänster: halvljus. Höger: helljus. Markörernas färg visar de tre observatörerna (G=blå, H=orange, J=grön). I den högra figuren har observatör G samma värde som observatör J då retroreflexionen är 120 mcd/m2/lx
(delsträcka 3), och observatör H har samma värde som observatör J då retroreflexionen är 139 mcd/m2/lx (delsträcka 2), se även Figur 5 och Tabell 6.
3.4.2.3. Bedömning i fart
Kantstolpsmetoden testades även när bilen var i rörelse. Dessa tester gjordes huvudsakligen i halvljus eftersom synavstånden i helljus blev så långa att de låg utanför det 200-metersavstånd som bedömts vara relevant. För vissa av sträckorna var det var dessutom knappt möjligt att i fart hinna göra några bedömningar innan sträckan tog slut.
Den första observatören (G) som körde sträckan fick välja en hastighet som hen kände sig bekväm med, det vill säga att hastigheten skulle väljas så att observatören hade kapacitet att både manövrera fordonet, ha god uppsikt över annan trafik samt räkna kantstolpar. Observatör G körde utan farthållare och körde de första sträckorna (sträcka 5–7) i hastigheten 30–40 km/h och ökade därefter till 55– 60 km/h. Efteråt sade sig observatör G inte ha velat köra fortare än så. Skyltad hastighet på sträckan var mestadels 80 km/h.
Den andra observatören (H) körde alla sträckor utom en, med farthållare i hastigheten 55 km/h, och upplevde att det var en lagom hastighet. Den tredje observatören (J) körde också med farthållare i hastigheten 55 km/h. Båda observatörerna som körde med farthållare tyckte att det var bra eftersom det underlättar köruppgiften och gör att man kan ägna mer uppmärksamhet åt att räkna stolpar och ha kontroll över omgivande trafik.
Figur 7 visar de tre observatörernas skattade synavstånd i halvljus. Det finns en viss skillnad mellan de olika observatörernas skattningar för ungefär hälften av sträckorna, där observatör G hade längre synavstånd än övriga. Observatör J skattade i nästan samtliga fall kortare synavstånd än
observatörerna G och H. 1 2 3 4 5 6 7 8 Delsträcka 0 20 40 60 80 100 120 140 160 180 200 Synavstånd (m)
Figur 7. Synavstånd i meter i fart, bedömt av de tre personerna G (blå), H (orange) och J (grön) på åtta delsträckor, i halvljus. Markörerna avser medelvärde över 3–8 observationer, felstaplarna avser minsta och största värde.
Figur 8 visar sambandet mellan skattade synavstånd och genomsnittlig retroreflexion för de åtta sträckorna. Det finns en svag tendens till att synavståndet ökar med retroreflexionen
100 110 120 130 140 150 160 Retroreflexion (mcd/m 2/lx) 30 40 50 60 70 80 90 100 110 120 130 Synavstånd (m)
Figur 8. Samband mellan skattade synavstånd och retroreflexion för delsträcka 1–8, i halvljus i fart. Markörernas färg visar de tre observatörerna (G=blå, H=orange, J=grön). Sträcka 2 och 7 har samma retroreflexion, 139 mcd/m2/lx, och det finns därför sex observationer av synavstånd för detta
retroreflexionsvärde (observatör J:s två skattningar har ungefär samma värde och därför syns bara den ena).
3.4.2.4. Jämförelse mellan stillastående och fart
Figur 9 visar en jämförelse över hur observatörerna bedömt synavstånden i stillastående respektive i fart, för delsträcka 1–4, i halvljus. De skattade genomsnittliga avstånden är ca 10 % kortare i fart än i stillastående. Det bör här noteras att de två betingelserna inte var helt lika. I stillastående satt
observatörerna på olika platser i bilen, medan samtliga satt på förarplatsen i fart-betingelsen. En ytterligare skillnad mellan stillastående och fart är att skillnaderna i skattat synavstånd mellan de tre observatörerna är större i fart än i stillastående, se Figur 5, Figur 7 och Figur 9. Detta talar för att osäkerheten i skattningarna är större i fart.
1 2 3 4 Delsträcka 0 10 20 30 40 50 60 70 80 90 100 Synavstånd (m) Stilla Fart
Figur 9. Jämförelse av skattade synavstånd i stillastående (gröna staplar) och i fart (turkosa staplar), i halvljus. Medelvärden över alla tre observatörer, felstaplarna visar standardfel.
En observatör (G) gjorde synavståndsbedömningar i fart (55 km/h med farthållare) i helljus, för fyra av delsträckorna. En jämförelse med motsvarande resultat för stillastående visade att även i det här fallet var de skattade genomsnittliga synavstånden omkring 10 % kortare i fart än i stillastående. Observatören upplevde att uppgiften krävde mycket koncentration och hen tyckte att det var svårt att veta om hen räknat rätt antal stolpar (synavstånden i helljus motsvarade ca 4–6 stolpar).
3.4.2.5. Repeterbarhet
För att undersöka kantstolpsmetodens repeterbarhet gjordes upprepad bedömning av synavstånden med kantstolpsmetoden på väg 1136, se Tabell 7. Fordonet framfördes i 30–50 km/h av person F. Resultaten visar att repeterbarheten är god – åtminstone för två av försökspersonerna.
Tabell 7. Kantlinjens synbarhet i antal kantstolpslängder, vid upprepad skattning, i halvljus, på väg 1136. Tabellen visar också beräknade synavstånd från modellen Visibility.
Antal kantstolpslängder, omgång 1
(flera skattningar) Antal kantstolpslängder, omgång 2 (flera skattningar) Person D Person E Person F Person D Person E Person F Medelantal kantstolpslängder 2,35 2,10 2,33 2,37 2,22 2,08 Motsvarar synavstånd (m) 141 126 140 142 133 125 Synavstånd enligt Visibility (m) 67 67 67 67 67 67
3.4.3. Jämförelse av reflektormetoden och kantstolpsmetoden
En jämförelse mellan reflektormetoden och kantstolpsmetoden gjordes på väg 1136. Sträckan för kantstolpsmetoden stämde till största del överens med den sträcka där bedömningar med
reflektormetoden gjordes. Emellertid innehöll sträckan för kantstolpsmetoden några kurvor – så var inte fallet för den andra metoden. Detta skulle kunna innebära att synavstånden med
kantstolpsmetoden är något underskattade eftersom åtminstone en kurva hade en radie som begränsade synavståndet. Felet bedöms dock inte vara mer än 5 %.
Resultaten visar att kantstolpsmetoden ger betydligt längre synavstånd än reflektormetoden, se Figur 10. Uttryckt i procent är synavstånden 35–55% längre med kantstolpsmetoden än med
reflektormetoden. Resultatet tycks vara oberoende av om bedömaren är förare eller ej (person F var förare).
Figur 10 visar också synavstånd beräknade med modellen Visibility. Resultaten överensstämmer med tidigare observationer, det vill säga att uppmätta synavstånd är länge än de beräknade.
0 20 40 60 80 100 120 140 160 Syna vs tå nd ( m )
Person D Person E Person F
reflektormetoden kantstolpsmetoden visibility
Figur 10. Jämförelse av resultaten med de två metoderna i halvljus. Medelvärde av två mätomgångar med tre observatörer. De grå staplarna visar synbarheten enligt modellen Visibility.