Nr 332 » 1983 Statens väg- och tratikinstitut (VTT) * 581 01 Linköping ISSN 0347-5049 f National Road & Traffic Research Institute * S-581 01 Linköping * Sweden
Nordiska jämnhetsmätare
:
En jämförande studie
TVärEZ TD) ID) 27E ALN ID) EZ,
Nr 332 + 1983 Statens väg- och tratikinstitut (VTI) * 581 01 Linköping ISSN 0347-6049 . National Road & Traffic Research Institute * S-581 01 Linköping * Sweden
Nordiska
jämnhetsmätare
En jämförande studie
FÖRORD
Här redovisade undersökning ingår som en
del i
NÄT-projektet "Taksering" som leds av Gösta Gynnerstedt.
Projektet bekostas av Nordiska Rådet. Peter W Arnberg
har varit delprojektledare och samordnat
undersök-ningarna samt utfört mätundersök-ningarna med SAAB RST. Leif
Sjögren har genomfört resultatbearbetningen och
samman-ställt presentationen. Forskare från Danmark, Norge
och Finland har också deltagit.
3.1 3 . 2 3 . 3 3 . 4 3. 4 . 1 3 . 4 . 2 3 . 5 4 . 1 4 . 2 4 . 2 . 1 4 . 2 . 2 4 . 2 . 3 INNEHÅLLSFÖRTECKNING REFERAT ABSTRACT SAMMANFATTNING SUMMARY BAKGRUND METOD MÄTFORDON SAAB RST CHLOE-profilometer
Jämnhetsmätning enligt TPI Bumpmeter
Danmarks bumpmeter Finlands bumpmeter Laser RST
RESULTAT
Resultat för mätningarna i Finland Resultat för mätningar med Laser RST Reliabilitet
Hastighetsberoende
Samband mellan Laser RST och CHLOE-profilometern
DISKUSSION LITTERATURLISTA Bilaga 1 (20) Sid L I - III D _0 0 --J UI & W NW 10 12 12 13 13 13 15
Nordiska jämnhetsmätare; En jämförande studie av Peter W Arnberg och Leif Sjögren
Statens väg- och trafikinstitut 581 01 LINKÖPING
REFERAT
En jämförande studie av olika i Norden förekommande jämnhetsmätare har genomförts. Syftet har varit att bestämma sambanden mellan de olika mätarnas mätetal.
Resultaten visar mycket hög korrelation mellan samt-. liga undersökta mätare. Reliabiliteten/repeterbarheten hos de mätare där detta kontrollerats har likaledes visat sig vara mycket hög.
L I
Evenness measuring vehicles used in Scandinavia A comparative study
by Peter W Arnberg and Leif Sjögren
National Swedish Road and Traffic Research Institute 8-581 01 LINKÖPING SWEDEN
ABSTRACT
A study has been carried out comparing the different evenness measuring vehicles in Scandinavia. The main purpose of this study has been the comparison of the measurement results from the different measuring vehicles.
The results show a very high correlation between all the studied measuring vehicles. The reliability of some measuring vehicles has been checked and proved to be very high.
L LI
Nordiska jämnhetsmätare; En jämförande studie av Peter W Arnberg och Leif Sjögren
Statens väg- och trafikinstitut 581 01 LINKÖPING
SAMMANFATTNING
En undersökning av olika i Norden använda jämnhets-mätare har utförts. Syftet var att bestämma sambanden mellan de olika mätarnas mätetal för att möjliggöra ett
utbyte av mätdata mellan länderna.
Förutom att jämnhetsmätarnas mätetal har jämförts på
vägsträckor med olika grad av jämnhet har även
mätar-nas reliabilitet, mätetalets repeterbarhet via
upp-repad mätning, bedömts. Reliabiliteten har på grund
av tidsbrist endaSt bedömts hos tre av de fem
del-tagande jämnhetsmätarna. Av de fem deldel-tagande mätarna
var två från
Sverige, SAAB RST och CHLOE-profilometer,
en från Danmark, Bumpmeter, en från Finland, Bumpmeter
samt slutligen från Norge en jämnhetsmätare av inhemsk
konstruktiön.
Undersökningen omfattade 100 mätsträckor med längden
400 m. Samtliga dessa sträckor uppmättes med mätarna.
Mätresultaten från de olika jämnhetsmätarna har
jäm-förts med varandra och korrelationskoefficienten vid
linjär korrelation har bedömts. Upprepade mätningar
har utförts med SAAB RST och de båda exemplaren av
bumpmeter. Resultaten från dessa har jämförts och
reliabilitetskoefficienten bestämts.
Resultaten visar en mycket hög korrelation mellan
mät-fordonen. Reliabiliteten hos de tre mätare där detta
undersökts är också hög. Detta betyder att ett utbyte
av jämnhetsmätresultat mellan de nordiska länderna är
möjlig.
LV
Vid ett senare tillfälle har jämförande mätningar mellan Laser RST och CHLOFE-profilometern genomförts. Jämnhetsmätning med Laser RST visar hög reliabilitet och hög korrelation med CHLOE-profilometern.
Evenness measuring vehicles used in Scandinavia A comparative study
by Peter W Arnberg and Leif Sjögren
National Swedish Road and Traffic Research Institute 88-581 01 LINKÖPING SWEDEN
SUMMARY
A study has been carried out comparing the different evenness measuring vehicles used in Scandinavia. The main purpose of this study was to compare the measure-ment results from different vehicles and to find out whether a
succeszul exchange of measurement data would
be possible.
The measurement results from road sections having
different degrees of roughness have been compared, and
the reliability of the measuring vehicles, the
repeti-tivity of the measurement results have been estimated.
As a result of lack of time the reliability has been
determined for only three of the five vehicles. Two
measuring vehicles were from Sweden, the SAAB RST and
the CHLOE profilometer, Denmark provided a Bumpmeter
and so did Finland while Norwayapresented a
construc-tion of their own.
100 road sections, each having a length of 400 metres,
were measured by the measuring vehicles. The
measure-ment results from the different evenness measuring
vehicles have been compared and the correlation
coefficient at a linear correlation has been estimated.
The results from repeated measurements with the SAAB
RST and the two Bumpmeters have been compared and the
reliability coefficient has been determined.
VI
The results show a very high correlation between the measuring vehicles. The reliability of the three
vehicles is also high. This proves that an exchange of results of evenness measurements between the countries is possible.
An estimation of the evenness measurements of the Laser RST as well as a comparison with the CHLOE
profilometer have also been carried out. The evenness measurements of the Laser RST show a high reliability and a high correlation with the CHLOE profilometer.
1 BAKGRUND
För att i olika beslutsmodeller kunna bedöma behovet av vägunderhåll från samhällsekonomisk synpunkt, t ex om och i vilken ordning nybeläggning och underhåll skall ske, krävs objektiva mätmetoder. Ett antal metoder för mätning av olika vägyteegenskaper har därför efter hand utvecklats. Som exempel kan nämnas fordon för mätning av enskilda storheter såsom friktion och jämn-het samt fordon med mätsystem för samtidig insamling av ett flertal mätstorheter. SAAB RST och Laser RST är exempel på den senare typen.
Inom projektet "Taksering av eksisterende veger med tanke på opprustning for fremtidig bruk" har ett behov framkommit att studera och jämföra de mätsystem som
används i Norden. Detta utgör en förutsättning för fortsatt samarbete och utbyte av erfarenheter. I denna rapport redovisas en jämförelse mellan några jämnhets-mätare som används i de nordiska länderna.
Jämnheten hos ett stort antal mätsträckor har uppmätts med de olika mätfordonen. Resultatens pålitlighet (relia-bilitet ) och överensstämmelse med
andra mätare
(validi-tet) har utvärderats. I jämförelsen ingår även
prak-tiska aspekter på hanterbarhet och trafiksäkerhet.
2
METOD
Metoden innefattar jämförande mätning med de olika
jämnhetsmätarna på ett antal mätsträckor med olika
grad av ojämnhet.
Mätsträckorna var 18 st och belägna i södra Finland.
Sträckornas längd var mellan 3,0 och 3,5 km. I
resultatredovisningen har dessa delats upp i delsträc-kor om 400 m. Vid jämförelsen har ca 100 st sådana delsträckor använts.
Mätfordonen, se nästa kapitel, kalibrerades och mät-ningarna genomfördes enligt normala rutiner. De resul-tat som använts vid jämförelsen har erhållits vid
följande mäthastigheter Laser RST 70 km/h SAAB RST 70 km/h CHLOE 5 km/h TÖT 50 km/h Bumpmetrarna 32 kmyh
Vissa sträckor har körts i flera hastigheter för att bestämma hastighetsberoendet. Mätningarna utfördes i höger hjulspår. I avsnitt 4.2 finns en jämförelse
mellan mätetalen från Laser RST och CHLOE och i avsnitt 3.5 en beskrivning av Laser RSTs
jämnhetsmätnings-system. Laser RST var inte klar då mätningarna i Finland utfördes.
3 MÄTFORDON
Jämhetsmätare kan generellt indelas i två typer:
Profilometrar respektive instrument av responstyp.
Vägojämnheten definieras som sådana avvikelser från en ideal slät och plan yta, som påverkar fordonsdynamik och/eller åkkomfort. En profilometer ger en absolut uppmätning av vägprofilen. Ett instrument av respons-typ mäter det dynamiska svaret hos det mekaniska sys-tem som färdas över vägojämnheten. Detta instrument
gergalltså ett relativt mått som beror'på det mekaniéka systemets uppbyggnad. Av de här behandlade jämnhet'tsl5 mätarna är CHLOE av profilometertyp och de övriga av responstyp. VTIs nya kontaktlösa profilometer Laser | RST består av en jämnhetsmätare som är av profilometer-typ .
I det följande behandlas de olika jämnhetsmätarnas
utvärderingsptincip och uppbyggnad.
3.1
SAAB RST
Jamnhetsmatnlng ar har en del i ett storrelntegrerat
mätsystem omfattande ett.flertal vagytekarakterlstlka.
Systemet är monterat i en Saab 900 (figur 2) .
Jämnheten mäts med hjälp av en accelerometer,
verti-kalt monterad vid navet till ett
mäthjul_:xnn används
för friktionsmätning. Medelst ett
hydrauliskt system
upprätthålls under mätning en konstant hjullast av
1000 N. Det primära måttet på jämnhet är här
effektiv-värdet för accelerationen beräknad över aktuell
sträcka. Detta mätetal korrigeras med hänsyn till
mät-hastigheten så att ett hastlghetsoberoende värde
erhålls. Mätetalet har vidare jämförts med människors
subjektiva upplevelse av obehag vid färd i buss på
vägar med olika jämnhetsgrad. Med hjälp av detta
sålunda etablerade samband mellan mätetal och
obehags-upplevelse kan jämnhetsvärdet från SAAB RST
presente-ras som ett komfortvärde i en niogradig skala.
Resul-taten trycks direkt på en printer i bilen, men kan
också lagras på magnetband. Resultaten är
hastighets-oberoende mellan 30 och 90 km/h, se Bilaga 1 figur .
13-15. Med SAAB RST kan man på ett snabbt och trafik-säkert sätt mäta jämnheten och de övriga storheter som ingår i systemet. l'x- - » 2 11%)4 x atv Q i % st hå 272 f.. " > Å ä !
00 Figur 1 SAAB RST med friktionsmäthjulet bakom bak-bo. d axeln. En accelerometer vertikalt monterad vid mäthjulets nav utnyttjas för mätning av vägojämnheten
392v.*fICHLOEfprofilometer
'ÖCHLOE profilometern är ett 7 m långt efterfordon, se
figur 2. Den består av ett fackverkschassi där
fram-"fänden uppbärs av dragbilen och bakänden av två bärhjul.
Framför bärhjulen har i chassits vertikala
symmetri-'"plah'två mäthjul monterats i tandem på en i sin
mitt-punkt i chassit lagrad balansarm.
Den betraktade storheten hos denna profilmätare är
vinkeln mellan chassits längdriktning och ovannämnda
balansarm. Denna vinkel som är en approximation äv
"?ägprofllens lokala lutning lagras på hålremsa. Efter
'.ävslutad mätning bearbetas data varvid lutningens
Variäns'OCh standardavvikelse beräknas. Jämnheten '
pfésenteras på tre olika sätt varav det s k
TRAC-_Vårdet.är'det som vanligen utnyttjas.
TRAC(TRÄfikerbarheten enligt CHLOEprofilometern) är grundat på
-"lutningens standardavvikelse och ger jämnhetsmätetalet
i en femgradig skala. Mäthastigheten är vanligen 5 km/h.
'CHLOE-profilometerns längd och låga
mäthastighet'méä-för att den är kraftigt hindrande mäthastighet'méä-för vägtrafiken.
(&,Mn.prag0,1)JuttWie* o_..Ao . ,$_='-_..'u.'l'. 3I=: "nde å t t' 3 ;fkétMg e.'1wå .u' k så? . rf"%.qu Mg 4&72 !. Sfp * 4.9 G **)" A#på segt kg 4+ & EC R% SW
?Figur 2. CHLOE prOfilometeri 3.3 ___ Jämnhetsmätning enligt TPI
_Denna jämnhetsmätare, som har utvecklats av
Transport-'$k0ndmisk institutt (TPI) i OSlo,äingår'SOm_en del i
lett.datainsamlingéSystem'uppbyggt kring én
mikropro-cessor, Motorola 6800 och är placerat i en personbll
*med stel bakaxel. Forutom jamnhet kan bl a spardjup
matas, se figur 3.
VTI MEDDELANDE 332
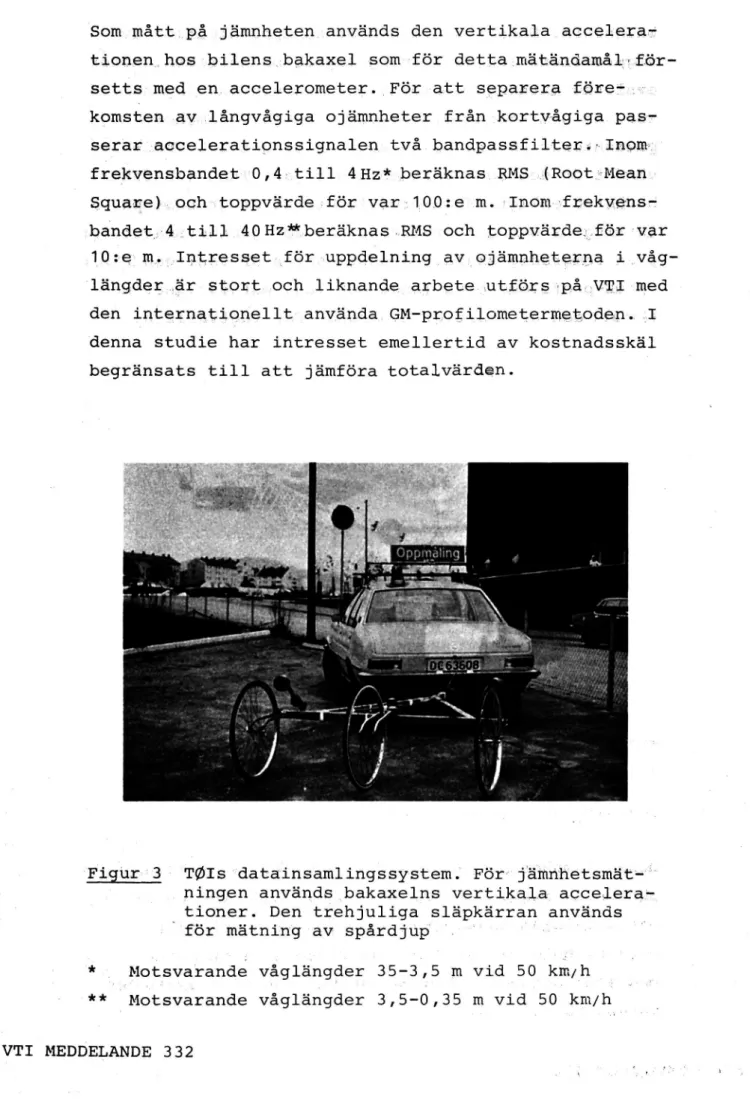
Som mått på jämnheten används den vertikala accelera-tionen hos bilens bakaxel som för detta
mätändamål:för-settsxmed_en,accelerometer._För att separera före»=
--komsåeniavglångvågiga ojämnheter från kortvågiga
pas-serar accelerationssignalentvå bandpassfilter .. Inom:
frekvenébandet=0,4ptill,4Hz*_beräknas.RMSgÅRootrMean,
Squa;e),oChatoppvärde:för var :100:e m. :Inom
:frekvens-bandet4 till 40 HZz*#beräknas RMS och toppvärde. för var
:10re'm,,Intressetgför=uppdélning;avaojämnhetarna i
våg-längder är stort och liknande arbete utförs :på. VTI med
den internationellt använda GM-profilometermetoden. .I
denna studie har intresset emellertid av kostnadsskäl
begränsats till att jämföra totalvärden.
Figur 3 TÖIs 'datainsamlingssystem. För jämnhetsmät-"
'
ningen används bakaxelns vertikala
accelera-tioner. Den trehjullga slapkarran anvands
för mätning av
spardjup
ss
k 0
Motsvarande vaglangder 35- 35 m Vld 50 km/h
- * *
Motsvarande vaglangder 3 ; 5 0 35 m vid 50 km/h
VTI MEDDELANDE 332
Resultaten lagras på magnetband. Eftersom jämnhetsmäte-talet är
hastighetsberoende krävs konstant hastighet
vid
mätning.'Vid_de.mäthingar med denna jämnhetsmätare
som redoVisas'i,föreliggande»rapport.har mätningarna
utförts vid 50 km/h.
3 . 4
Bumpmeter
Bumpmetern'ärqupbyggd semyen.enhjulig5släpkårra; se
figur 4 och
55 Den består a? ett. chassi i vilker
mär-hjulet, som har
dimenSionen 6,00x16", är dpphängt.i två
bladfjädrar och dämpat av två vätskestötdåmpare.
Bump-metern är förbunden med dragbilen via en kardanled.
Kardanleden medger fri rörelse kring såväl en vertikal
som en tvärriktad axel genom upphängningspunkten.
Chassits massfördelning är sådan att stötcentrum
lig-ger i mäthjulets axel. På detta sätt elimineras
inver-kan av dragbilens lodräta rörelser på mätresultatet.
Mäthjulets
sammanlagda nedåtgående (=uppåtgående)
rörelse i förhållande till chassit per körd sträcka
används som jämnhetsmått hos bumpmetern. Resultatet
presenteras oftast i enheten cm/km. Eftersom mätetalet är
hastighetsberoende erfordras konstant hastighet vid
mätning. Som standardiserad mäthastighet används
oftast 32 km/h, vilket innebär att mätning är hindrande
för övrig trafik. vid mätningarnajrdenna rapport har
denna mäthastighet använts.
Mäthjulets rörelse summeras här av en "magnescale
digital transducer". En pulsgivare i förbindelse med
dragbilens växellåda ger den körda sträckan. Data
registreras på en bandspelare. Danmarks bumpmeter
har varit kopplad så att den mätt i höger hjulspår.
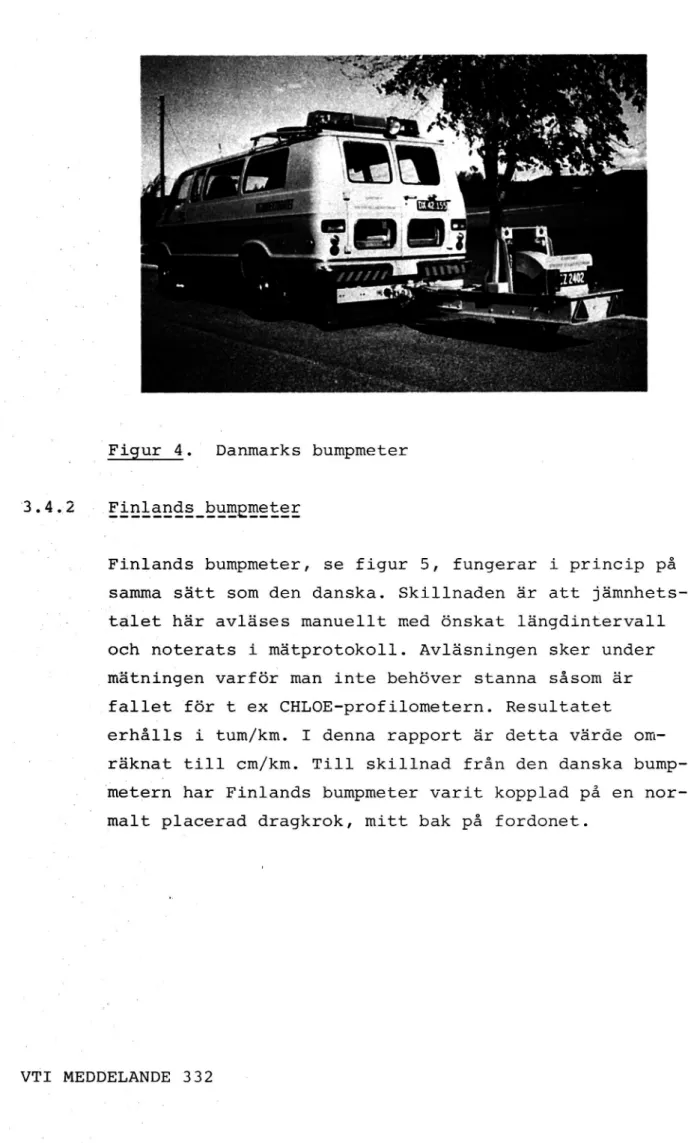
Figur 4. Danmarks bumpmeter
3.4.2 - Finlands _bumpmeter
Finlands bumpmeter, se figur 5, fungerar i princip på
samma sätt som den danska. Skillnaden är att
talet här avläses manuellt med önskat längdintervall
och noterats i mätprotokoll. Avläsningen sker under
,mätningen varför man inte behöver stanna såsom är
fallet för t ex CHLOE-profilometern. Resultatet
erhålls i tum/km. I denna rapport är detta värde
om-räknat till cm/km. Till skillnad från den danska
bump-"metern har Finlands bumpmeter varit kopplad på en
nor-malt placerad dragkrok, mitt bak på fordonet.
pot uppeet tstas we gråa PiM. -42 1 et 5 »mer(pa ts" tå*$( l # r. ' c... # 0 , * 4 i -A p ork As k st APuke S & er %-$"' dr & Pm d s tre ,,»:väre K av y * - % Neav? **k FA l i Söt
ju!-i-_- u=; QNII
' £ £
m LILG
hago 3
Figur5
Finlands bumpmeter
3.5
Laser RST
Detta jämnhetsmätningssystem är en del i ett större
integrerat'kbntäktlö3t mätsystem omfattandebettifieré
tal
GäthekafaktefisEika.'MätSyStemets dömihéranåé-del
är en tvärprofilmätare bestående av elva laserénHéter
för avståndsmätning. Se figur 6.
Jämnheten mäts med hjälpkav de två laserenheterna över
.hjulspåren och en accelerometer placerad mitt emellan
dessa. Medelvärdet från laserenheterna ger bilchassits
vertikala avstånd till vägytan. För att kompensera för
bilchassits vertikalacceleration adderas den två
-gånger integrerade accelerometersignalen till
laser-enheternas värde.
Den på detta sätt erhållna signalen RMS-bildas (Root
Mean Square) och omvandlas till en niogradig skala på
samma sätt som hos SAAB RST. Mätetalet 1 anger en
VTI MEDDELANDE 332
10
mycket jämn och 9 en mycket ojämn väg. Resultaten är hastighetsoberoende i intervaller 30 till 90 km/h Observera att det erhållna komfortvärdet bygger på mätning av
ojämnheternavigbådajhjulspåren.Hq_;giaj
ta t
mar.DetkohtaktloSamatsystemet baserat palaser ger
slitagga*Med'Laser R5T_kan manfmedvah*snabb Ochitrafik
äkérametöd mäta jämnheten OChxde=öVriga storhetér,
t
i
somingår i systemet.
___ -=
000
Figur 6
Laser Road Surface Tester
4
o
RESULTAT
4 . 1
Resultat från mätningar i Finland
korrelationen mellan mätfordonen redovisas i bilaga,
tabell 1 och figur 1-10. Den linje som visas i
figu-rerna är en regressionslinje beräknad anligt-mihsta
kvadratmetoden .
11
Medelvärde och standardavvikelse för samtliga 103 upp-mätta delsträckor redovisas i tabell 2. För CHLOE-pro-filometern är beräkningen
dock baserad på endast 75
delsträckor. På grund av den låga mäthastigheten har
inte fler hunnits med.
Korrelationskoefficienten betecknad med r, visar hur
väl mätresultaten från två mätfordon överensstämmer
vid mätning på samma sträckor. Vid hög grad av linjär
överensstämmelse närmar sig korrelationskoefficienten
värdet + eller -1.
Figur 11-14 i bilaga visar reliabiliteten för SAAB RST
och de två bumpmetrarna. Med reliabilitet avses
repe-terbarheten hos
mätetalet vid upprepad mätning på samma
mätsträckor. För CHLOE och TÖIs mätare saknas denna
information då på grund av tidsbrist mätsträckorna
uppmätts endast en gång med dessa mätare.
I bilaga, figur 13-14, visas reliabiliteten för SAAB
RST vid 50 km/h resp 70 km/h. Mätetalets
hastighets-beroende hos SAAB RST visas i Figur 15.
Reliabilite-terna för SAAB RST är beräknade för 22 delsträckor.
Hastighetsberoendet är beräknat genom att korrelera
medelvärdet av de två mätningarna för respektive
hastighet mot varandra.
Orsakerna till att de erhållna korrelations- och
relia-bilitetskoefficienterna avviker från värdet +1 är
flera. Dels förekommer ett antal felkällor, såsom t ex
brister i mätsystemets mekaniska uppbyggnad och
avrund-nings- och beräkningsfel i beräkningsenheten. Dels
observerar de olika mätfordonen inte samma egenskaper
hos väggytan. Det förstnämnda påverkar uppskattningar
av såväl korrelationen som reliabiliteten, medan det
sistnämnda påverkar korrelationen.
12
Den personal som utförde mätningarna har gjort föl-jande påpekanden
1) Svårighet att hålla rätt och jämn hastighet
2) Ryck i mät- resp dragfordon vid växling
3) Någon sträcka var täckt med jordklumpar.
tterligare faktorer som kan ha påverkat resultaten är att något olika startpunkt använts. Uppgiften att mäta i höger hjulspår kan ha följts mer eller mindre noggrannt beroende på mätfordonets konstruktion, föra-rens skicklighet och störningar från övrig trafik. Dessa uppräknade faktorer är svårkontrollerbara. Om inverkan av dessa kunde elimineras skulle såväl mätfordonens reliabilitet som korrelationen den emellan öka. En ytterligare faktor som emellertid bör beaktas är att mätfordonen vid denna jämförande studie
övérvakades
och kalibrerades med en noggrannhet som kanske inte
är att förvänta vid normal produktionsmätning.
4 . 2
Resultat för mätningar med Laser RST
4.2.1
Reliabilitet
En ca 30 mil lång vägslinga har delats upp i 75 objekt
med varierande längder mellan 200 - 20 000 meter. Denna
slinga har körts två varv i 70 km/h och objektens
jämn-het uppmätts. Resultaten från de två mätningarna har
jämförts och givit ett mått på reliabiliteten. Denna
erhölls till r= 0.98, se figur 16.
13
4.2.2 Hastighetsberoende
En ca 2,7 mil lång vägslinga har delats upp i 67 st 400-meterssträckor. Denna slinga har körts två gånger, första gången i 75 km/h och andra gången i 50 km/h. Resultaten från dessa mätningar har jämförts och givit ett mått på hastighetsoberoendet. Mätningarna gav en korrelationskoefficient r = 0.95, se figur 17.
4.2.3 Samband mellan Laser _RST_ och _CHLOE-profilometern
Samma vägslinga som angivits i avsnitt 4.2.2 har upp-mätts med CHLOE-profilometern. TRAC-värden från denna har jämförts med Laser RSTs komfortvärden och givit en korrelationskoefficient r=-0.90, se figur 18.
DISKUSSION
192
)
Resultaten visar god överensstämmelse mellan mätarna vid noggrant kontrollerade prov av här genomföra typ. Detta innebär att man även vid normala fältmätningar borde kunna få resultat som är omräkningsbara från en mätare till en annan och som sålunda kan användas som underlag för de generella modeller som byggs inom huvudprojektet. Risken är emellertid alltid att de fältmätningar som utförs sker under
tiäspress och att
kalibreringar och hastighetshållning därigenom blir
lidande. Mekaniska mätfordon kräver mycket
underhålls-arbete och med stigande personalkostnad finns risker
att detta blir eftersatt. I Sverige har därför
väg-och trafikinstitutet väg-och vägverket satsat på så
under-hållsfria system som möjligt. Detta har åstadkommits
genom att utnyttja kontaktlös mätning t ex med hjälp
14
av laserteknik. I förhållande till de stora underhålls-kostnader som vägnätet kräver blir trots den extra in-köpskostnaden ett sådant laserbaserat mätsystem för-hållandevis billigt. En kostnadsberäkning av Laser RST ger vid handen att endast någon tiondels procent av vägunderhållskostnaden räcker för mätning av jämnhet, spårdjup och makrotextur.
15
LITTERATURLISTA
Arnberg, P.W., Magnusson, G., Ohlsson, E. Mätning vid hög hastighet av olika vägytekarakteristika,
VTI meddelande nr 154, 1979.
Johansen, T. Viagraf og bumpmeter, sammenligning af måleresultater, Statens Vejlaboratorium,
Laboratorierapport 32, 1977
Magnusson, G. Inventering av utländska bestämmelser och standardkrav för vägars jämnhet,
VTI rapport nr 84, 1976
Magnusson, G. och Arnberg, P.W. Bedömning och mätning av vägojämnheter
VTI rapport nr 83, 1976
Magnusson, G., Arnberg, P.W. och Pettersson, H-E. Mätning och bedömning av ojämnheter på grusväg, VTI rapport nr 123, 1977
Skarra, N. General purpose datalogging equipment and data retrieval systems used in road traffic studies, road inventory studies and management of road
maintenance, Institute of Transport Economics, TÖI-notat, 1980
Wambold, J.C. DeFrain, L.E., Hegmun, R.R., McGhee, K., Reichert, J. and Spangler, E.B. State of the art of
measurement and analysis of road roughness, The Pennsylvania Transportation Institute, 1981
FIGURER OCH TABELLER
Bilaga 1 (20)
Tabell la. Korrelationen mellan mätbilarna
l
SAAB RST CHLOE Nor TPI Dan Bump Fin Bump
SAAB RST 0 96 -0 8 0.82 0 . 82 0 . 5 7
CHLOE m - -0 . 84 -0 . 81 -0 . 57
Nor TGI --- 0 . 57
Dan Bump 0 . 97 0 . 9 1
Fin Bump 0 . 98
Tabellen visar korrelationen mellan de olika jämnhets-mätarna och reliabiliteterna för några. Reliabiliteten
för SAAB RST är beräknad på 22 observationer.
Reliabiliteten för finska och danska bumpmetrarna är beräknade på 103 observationer. Övriga mätare har kört sträckorna endast en gång. Alla korrelationer är beräk-nade på 103 observationer utom korrelation mot
där 75 observationer använts.
Tabell 1b. Korrelationen mellan CHLOE och Laser RST
Laser RST CHLOE
Laser RST . 98 -0 . 90
Tabellen visar korrelationen mellan Laser RST och CHLOE samt reliabiliteten för Laser RST. Jämförelsen mellan Laser RST och CHLOFE bygger på 28 observationer. Relia-biliteten för Laser RST bygger på 75 observationer.
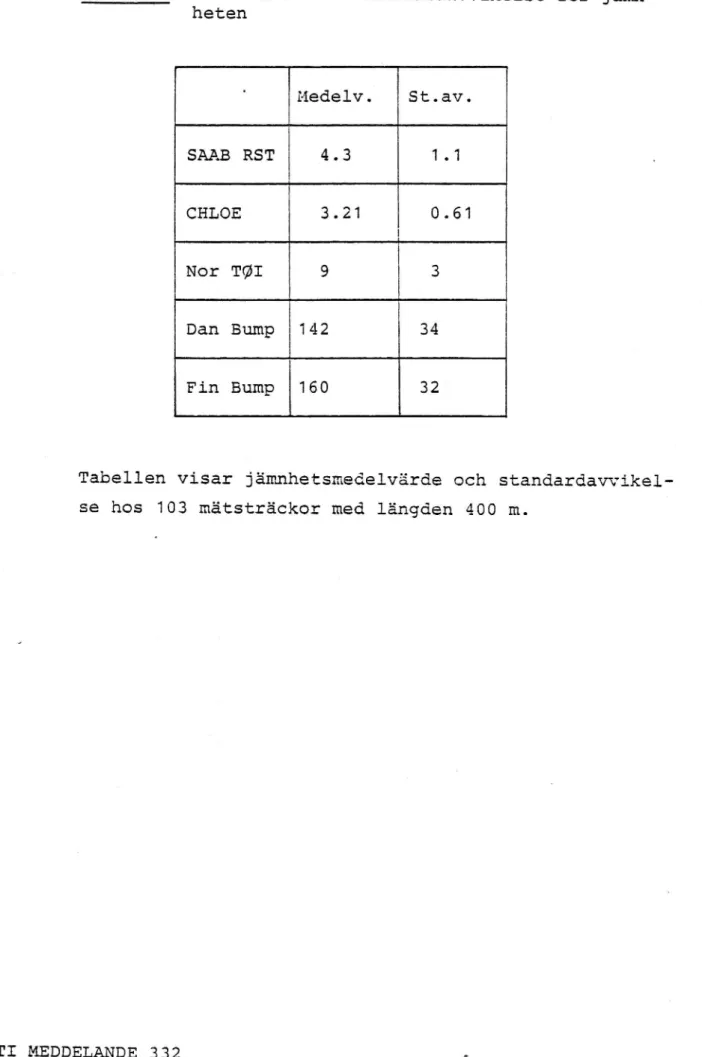
Tabell 2. Medelvärde och standardavvikelse för jämn-heten Medelv. St.av. SAAB RST 4 . 3 1. 1 CHLOE 3. 21 0 - 6 1 Nor TI 9 3 Dan Bump |142 34 Fin Bump |160 3 2
Tabellen visar jämnhetsmedelvärde och standardavvikel-se hos 103 mätsträckor med längden 400 m.
Bilaga 3 C XL 2E s 00- EVENESS 4. 50-X m 3 X "4 4, 201 'åkåx szgä *'/_( Xx): a _ >, ,3. S Ad i Ssg2 )( oss K 3.20- ik
s
>;
x sa & S ke )( X D J C CC)J X X X NSV + J % i 504 se X X. i 0 C-m ma, C. 5 Q-a ar U-bbq F # t + T 29 o (Q u 23 s ns 0 £. BM n' no C . CU CQ i , VV 9, JC ©. CC 10.CG 55688 ARSFigur 1. Korrelationen mellan SAAB RST och CHLOE
Korrelationskoefficient r = -0.81
Medelvärde x-koordinat och spridning x = 4.4 s = 1.1 (75 obs.)
Medelvärde y-koordinat och spridning y = 3.21 s = 0.61(75 obs.)
Regressionslinje v = -0.44x + 5.14
po-* P-+ po-+ P g ] P O -E r y C ) -> CQ C Q O C ) _ 1 i 0 & 6. i let 2 18 ( o C C P 3 LJ ; » C C) © 3 -K 1 Få 0 . 82 3 n © f? [en , frå a CD (% ) X A X CA C D CQ C ) GP ) -+ --4 C O C ) (_ )
Figur 2. Korrelationen mellan SAAB RST och TÖIs mätare Bilaga
Bilaga 303 qc_ EVIEIXJESS P & har 272.00- X "i..-'g'? 6 m J # ln k ST > Sect Son // Zyx X d 210.000[o l r 1 //Qsd i 20. 00-
i;
un CQ CD) ) +
i 20 C-
X,
sx %
1! [4 f d if". 1 # * fr Saar Sat P a // X. pah S maa dLos kasN aa
230. 20-aa
0. CP0.03 3 jamv -- u%.bDn "rD LC La C . CCR DD 00 (12 00LC . CiZ
Ss56B RS T
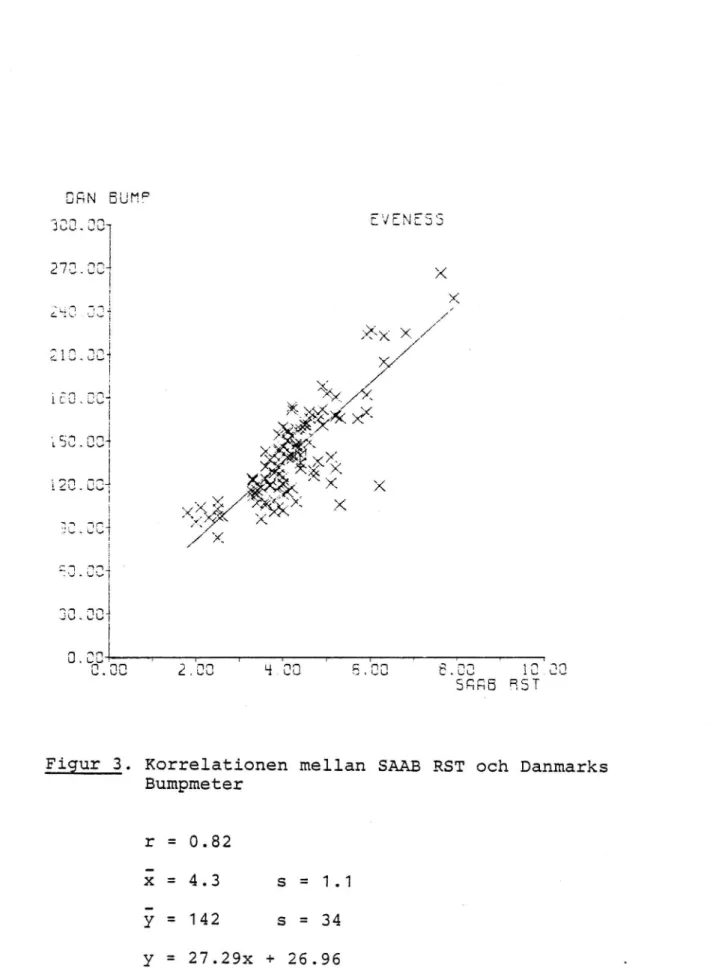
Figur 3. Korrelationen mellan SAAB RST och Danmarks
Bumpmeter 1 O 00 NM 94 1 1 > 9 [0 11 -> -. 34 HQ 1 11 onn ed v s N un 11 27 .29%x% + 26.96 t 11 VTI MEDDELANDE 332
V => ole 26 ,77% + 47.02 HQ 1 160 s NJ » 1 1 4 . 3 0 . 87 Bumpmeter
Korrelationen mellan SAAB RST och Finlands Figur 4 . © N o C © | () CQ CQ CQ 50. 00-3C . 204 ) CD CD) CQ (2 i 50. Ci NJ CQ () NJ CQ C) [09] -) (2) CQ G) CQ C) EVENES S Bilaga
Bilaga (94 C) S C © D N H 11 1 O e 00 ön P 4 1 11 LJ m 3 un 1 0.61 (75 obs.) 4 (75 obs .) H Q 1 H t o (0 ) 1
DEN SCMP 3CO. OC:
Bilaga
EVENESS
CQ CD Q
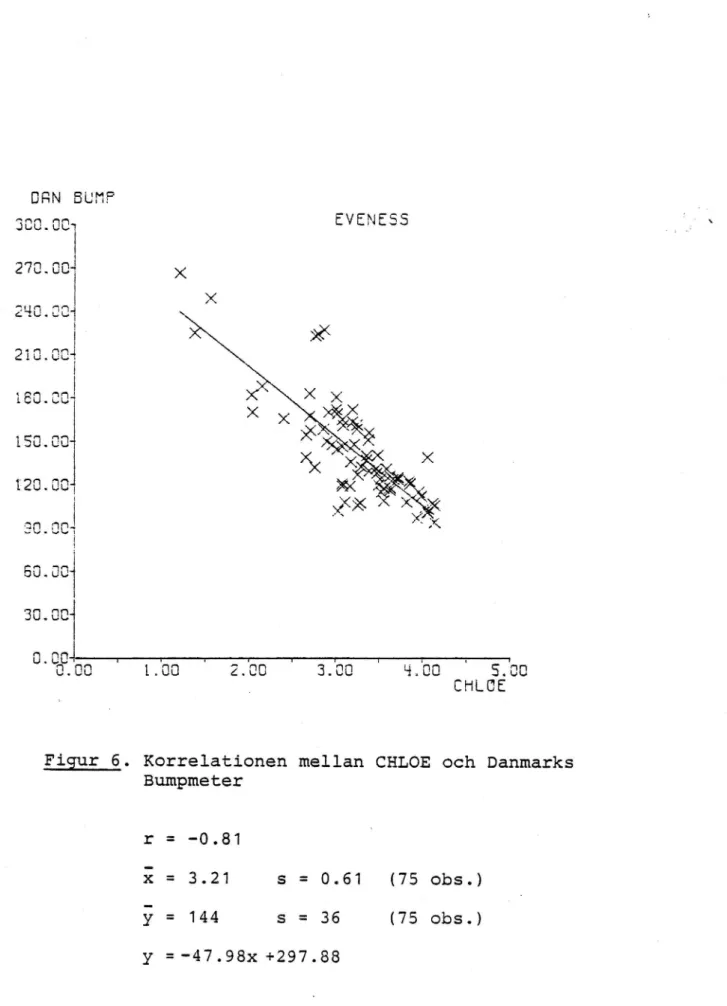
Figur 6. Korrelationen mellan CHLOE och Danmarks Bumpmeter
r = -0.81
x = 3.21 s = 0.61 (75 obs.)
y = 144 s = 36 (75 obs.)
Bilaga
X
'
EvVENESS
. 00
1 . 00
2 . 00
3.00
4 . 00
5. 00
Figur 7. Korrelationen mellan CHLOE och Finlands
Bumpmeter _
ro= -0.87
x = 3.21
s = 0.61
(75 obs.)
y = 162
s = 35
(75 obs.)
Y= 8 .51x + 68.03 + I 1 14 2 34 94 1 0 . 82 Danmarks Bumpmeter
Korrelationen mellan TPIs mätare och Figur 8. 15 . 00 NCBR TC1 20. (D Y ) © CQ Ci) CQ CQ D J (2 ) CQ ) em s (C ) CX ) CQ ) C Q fn ) C Q C Q EVENESS DAN BUNP Bilaga 10
Bilaga 11 FIN BUMP 9 2" V 2 K! 300. 20- EVENESS 270.249. 00-X 210. 00-
' se
>od
z
pd
i 50. 00-
-Q.;;gb
XX,
st
"får:. NÄÄS. [_ SK i 50. 20- -e X x )( I & )( l o r 30. 50. 00-30. 0.00 r y - ;- ; C. 00 4.00 8.00 12. CO 15.00 20.00 NCR TC]Figur 9. Korrelationen mellan TPIs mätare och Finlands Bumpmeter F j = 0.87 9 s = 3 P 4 1 11 160 s = 32 H å 1 11 8 .39x + 86.92 ä t 1
VIL MEDDELANDE 332 Y: 0.86x + 37.32 H Q 1 160 S 3 2 S 34 0 91 Bumpmetrar
Korrelationen mellan Danmarks och Finl Figur 10. © ©c O M C C ) (Q ) [0 8] C O (2 ) Q ) n CD D C a ( D CQ) 19 ) C 10] C D ( ) CX ) N J pe + C D C J fn..) CQ C C ) C O CQ ) .JM ) N BUMP Bilaga 12
Y 0 . 97 1 4 2 1 . 0 2x S s 34 36 3 . 13 240.008 D GN BUMP30118
Figur 11. Danmarks Bumpmeters körning 1 mot körning 2
(C ) (Q) 20 © t p i (O ©) CD L. [92) CQ) CQ TL) C) .) fx ) CJ (Q LA (D) (_) O) () C) ) CQ CQ N) () CC) () (2 CQ () D&N BUMP emL. Bilaga 13
Y: 1.06x - 9 . 42 H d I 160 - 3 4 s 31 0 . 98
Figur 12. Finlands Bumpmeter körning 1 mot körning 2
[S V C D -C ) ( ) 19 2) CQ ) CQ ) n CQ (C) (_) C3 ) C ) C. ) 1) C) C) EVENESS Bilaga 14
Bilaga 15 BN 2 i 0. CC» n ** [M l "Z (4 CA 192) T) -3 CT ) CD [00 8 (3 (I J ( 2 (Q ) ( D CQ ) C ) 1 i 1 1 N u n 0 i L CQ (';) C ) CT) (i ) [N ] C Q (|) CQ) P © © M C . p% "* ** .CC 2.CQ 4.00 5.00 c. 00 1 S6AB RST + ( D ( ) © )
Figur 13. SAAB RST körning 1 mot körning 2 i 50 km/h
H j 11 O 0 sy d P å 1 1 H e u n 0 2 11 [ e n ) o v 0 .6 W I 1 N S X 0 1 0.97x + 0.02 b a 11 VTL MEDDELANDE 332
Bilaga 16 10.00 - £vVENNESS 41 ) ()) C CT ) C ( i -J I) CQ) Cl.) L ) (Q) (D 1 Y . 00 & .C00 i C. 00 * & SAAB RST Q CJ Q NM © Q C C C) OV
Figur 14. SAAB RST körning 1 mot körning 2 i 70 km/h
r = 0.96 x = 4.5 s = 0.6 y = 4.6 s = 0.7 1.03x - 0.03 b d L VTL MEDDELANDE 332
Bilaga 17 n C) 5868 SST KM / H 19. 00- (*) CL ) CQ le -3 CD () S. C00-4, 004 kn an D a h hor 1 2 , 024 i . 8.00 -- = - t ea C. CC 2 CC 4 00 5.00 = CC 10. OC RST 52 KM/H
Figur. 15. Medelvärde av körning 1 och 2 i 50 km/h med SAAB RST mot motsvarande i 70 km/h
F 1 O 0 CJ P4 1 1 > un [0] 1 o o 0 . 6 +H 4 1 1 w o n 11 0.96x + 0.28 HQ 1 VTI MEDDELANDE 332
Bilaga 18 Laser RST 1 EVENNESS 9 ks 3 . 7 o 6 0 % 2 k S " o . &. 4 = 29 -* gen 3 © u. P*9 # o © 2 d 1 k 9 7 y p v - 2 v---W Laser RST 2
Figur 16 Reliabilitet för Laser RST
n = 75 r = 0.98
x = 3.9
y = 3.8
Bilaga 19 Laser RST 75 km/h EVENNESS & Laser RST v 2222 vr gemene8 -C () Jo [Ye 10 20 0300 04 05 6 7 8 9
Figur17 Hastighetsberoende för Laser RST
n = 67 r= 0.95 x = 4.0 s.d. = 1.3 y = 4.0 s.d. = 1.1 y= 0 .86x + 0.54
Bilaga 2 0 CHLOE - - EVENNESS 5 4 3 2 1