for safe Physical Human Robot Interaction
MUHAMMAD REHAN AHMED
Compliance Control of Robot Manipulator for Safe Physical Human Robot Interaction
© Muhammad Rehan Ahmed, 2011
Title: Compliance Control of Robot Manipulator for Safe Physical Human Robot Interaction.
Publisher: Örebro University 2011 www.publications.oru.se
trycksaker@oru.se
Print: Intellecta Infolog, Kållered 01/2011 ISSN 1650-8580
ISBN 978-91-7668-776-5
Abstract
Inspiration from biological systems suggests that robots should demonstrate same level of capabilities that are embedded in biological systems in perform- ing safe and successful interaction with the humans. The major challenge in physical human robot interaction tasks in anthropic environment is the safe sharing of robot work space such that robot will not cause harm or injury to the human under any operating condition.
Embedding human like adaptable compliance characteristics into robot ma- nipulators can provide safe physical human robot interaction in constrained motion tasks. In robotics, this property can be achieved by using active, passive and semi active compliant actuation devices. Traditional methods of active and passive compliance lead to complex control systems and complex mechanical design.
In this thesis we present compliant robot manipulator system with semi ac- tive compliant device having magneto rheological fluid based actuation mech- anism. Human like adaptable compliance is achieved by controlling the prop- erties of the magneto rheological fluid inside joint actuator. This method of- fers high operational accuracy, intrinsic safety and high absorption to impacts.
Safety is assured by mechanism design rather than by conventional approach based on advance control. Control schemes for implementing adaptable com- pliance are implemented in parallel with the robot motion control that brings much simple interaction control strategy compared to other methods.
Here we address two main issues: human robot collision safety and robot motion performance.
We present existing human robot collision safety standards and evaluate the proposed actuation mechanism on the basis of static and dynamic collision tests. Static collision safety analysis is based on Yamada’s safety criterion and the adaptable compliance control scheme keeps the robot in the safe region of operation. For the dynamic collision safety analysis, Yamada’s impact force cri- terion and head injury criterion are employed. Experimental results validate the effectiveness of our solution. In addition, the results with head injury criterion showed the need to investigate human bio-mechanics in more details in order to
i
acquire adequate knowledge for estimating the injury severity index for robots interacting with humans.
We analyzed the robot motion performance in several physical human robot interaction tasks. Three interaction scenarios are studied to simulate human robot physical contact in direct and inadvertent contact situations. Respective control disciplines for the joint actuators are designed and implemented with much simplified adaptable compliance control scheme.
The series of experimental tests in direct and inadvertent contact situations validate our solution of implementing human like adaptable compliance during robot motion and prove the safe interaction with humans in anthropic domains.
Acknowledgments
First, I would like to show my deepest gratitude to my supervisor, Prof. Ivan Kalaykov, who has given precious academic and personal support throughout this difficult task. I am heartily thankful to him for all his support and for his brilliant supervision from initial to the final stage of the thesis.
This research work was funded by Higher Education Commission of Pak- istan (HEC), IST and partially funded by KK foundation, Sweden. I would like to thank them for their financial support during my PhD studies.
I would like to express my special thanks to Barbro Alvin, for arranging my initial stay in Sweden and for her help at the beginning of my studies. I am very grateful to Per Erik Nederman, with whom I have discussed several mechanical issues relating to our experimental setup. I would like to take this opportu- nity to offer my regards to Dimitar Dimitrov, Abdelbaki Bouguerra, Boyko Iliev and Anani Ananiev who shared their knowledge. I thank master’s students from Örebro University, Muhammad Saad Shaikh, Syed Zill-e-Hussnain and Ali Abdul Khaliq for their helpful hand while I was performing experiments with the robot manipulator.
Many thanks to my colleagues Abdelbaki Bouguerra, Jayedur Rashid, Sahar Asadi and Mohammad Rahayem for their support, help and encouragement.
Special thanks to Bo-Lennart Silfverdal, Per Sporrong, Kicki Ekberg, Jenny Tiberg and all the administration staff for their valuable support during my study period.
I also thank my sisters and my brothers, all my in laws and my family mem- bers for their unconditional love, for supporting and cheering me up during these years.
I express my special gratitude to my loving wife Sidra for her patient sup- port and for being my best friend all the time. She has always motivated and encouraged me and without her sincere efforts, this work would not be possi- ble.
Finally, I am grateful to my parents who have supported me remarkably in all these years. I specially thank my mother for her love, prayers and moral support which gave me the strength in difficult times. She encouraged me to
iii
pursue my PhD studies and without her encouragement and faith on me, I would not be able to achieve this milestone of my life.
Contents
1 Introduction 1
1.1 Motivation . . . . 1
1.2 Overview . . . . 2
1.3 Research objectives . . . . 4
1.4 Expected contributions . . . . 4
1.5 Publications . . . . 5
1.6 Thesis outline . . . . 6
2 Background and Related Work 9 2.1 Constrained motion and control . . . . 9
2.1.1 Non-contact tasks . . . . 11
2.1.2 Contact tasks . . . . 12
2.2 Compliant actuation devices . . . . 13
2.2.1 Active compliant devices . . . . 16
2.2.2 Passive compliant devices . . . . 21
2.2.3 Semi-active compliant devices . . . . 27
2.3 Summary . . . . 33
3 MR Fluid Based Compliant Actuator 35 3.1 Magneto rheological fluids . . . . 35
3.1.1 MR vs ER fluids . . . . 36
3.1.2 Peripherals of MR fluids . . . . 36
3.2 Operational modes of MR fluid devices . . . . 37
3.2.1 Valve mode . . . . 37
3.2.2 Squeeze film mode . . . . 37
3.2.3 Direct shear mode . . . . 38
3.3 Modeling of MR fluid actuator . . . . 38
3.3.1 Fluid behavior and shear mechanism modeling . . . . 40
3.3.2 Magnetic field modeling . . . . 44
3.3.3 MRF actuator model . . . . 46
3.4 Actuator experimental model . . . . 47
v
3.4.1 Static model . . . . 47
3.4.2 Dynamic model . . . . 47
3.5 Summary . . . . 50
4 Compliant Robot Prototype 53 4.1 Modeling of two link planar robot manipulator . . . . 53
4.2 Proposed safe robot control system . . . . 57
4.3 Robot prototype and experimental setup . . . . 57
4.3.1 Sensor system . . . . 58
4.3.2 Computation and simulation . . . . 58
4.4 Summary . . . . 59
5 Collision Safety in pHRI 61 5.1 Collision safety . . . . 61
5.1.1 ISO safety standard for industrial robots . . . . 62
5.1.2 Preview of related work . . . . 63
5.2 Static collision . . . . 66
5.2.1 Safety analysis . . . . 66
5.2.2 Adaptable compliance scheme . . . . 66
5.2.3 Experiments . . . . 66
5.3 Dynamic collision . . . . 71
5.3.1 Safety assessment . . . . 71
5.3.2 Injury criterion for head . . . . 75
5.3.3 Experiments . . . . 78
5.3.4 Impact force criterion . . . . 84
5.3.5 Experiments . . . . 84
5.3.6 Discussion . . . . 87
5.4 Summary . . . . 87
6 Compliance Control and Robot Performance 89 6.1 Motion performance . . . . 89
6.1.1 Interaction scenarios . . . . 90
6.1.2 Control disciplines and compliance control scheme . . . 91
6.1.3 Experiments . . . . 92
6.2 Summary . . . 106
7 Conclusions 107 7.1 Thesis summary . . . 107
7.2 Contributions . . . 109
7.3 Future work . . . 110
List of Figures
2.1 Classification of constrained motion and control. . . . 11
2.2 Classification of compliant actuation devices. . . . 15
2.3 Conceptual design of mechanical impedance adjuster. . . . 22
2.4 Series elastic actuator block diagram. . . . 23
2.5 Force control loop of series elastic actuator. . . . . 23
2.6 MACCEPA prototype. . . . 24
2.7 MACCEPA working principle. . . . 24
2.8 The design of AMASC with pulleys and cables. . . . . 25
3.1 MRF valve mode. . . . 37
3.2 MRF squeeze mode. . . . 38
3.3 MRF direct shear mode. . . . 38
3.4 Cross section of MRF clutch. . . . 39
3.5 MRF rotary clutch lord corporation. . . . 40
3.6 Bingham plastic model. . . . 41
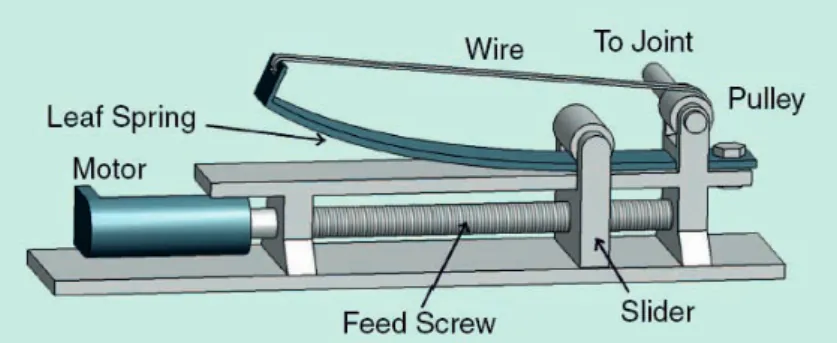
3.7 Mechanism design of disc shaped MRF clutch. . . . 42
3.8 Shear stress versus magnetic induction. . . . 45
3.9 MRF actuator block diagram. . . . 46
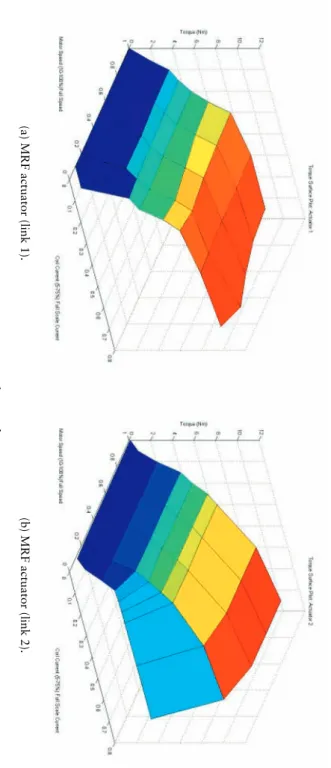
3.10 Static analysis of MRF actuators. . . . 48
3.11 2-D plot - static analysis of actuator 1. . . . 49
3.12 2-D plot - static analysis of actuator 2. . . . 50
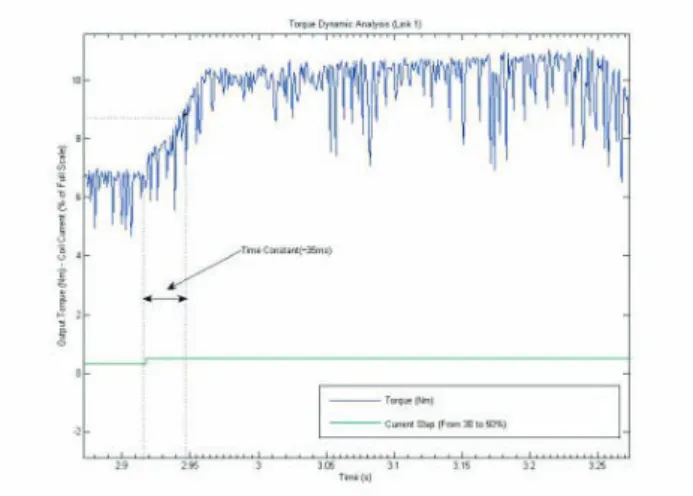
3.13 Dynamic analysis of MRF actuator at link 1 . . . . 51
4.1 Two link planar robot manipulator. . . . 53
4.2 Coordinates of two link planar manipulator. . . . 54
4.3 Robot arm control system block diagram. . . . 57
4.4 Experimental setup. . . . 59
5.1 Adaptable compliance scheme . . . . 67
5.2 Experimental setup. . . . 67
5.3 Static collision force without adaptable compliance . . . . 68
vii
5.4 Actuator performance without adaptable compliance . . . . 69
5.5 Static collision force with adaptable compliance . . . . 70
5.6 Actuator performance with adaptable compliance . . . . 71
5.7 Human skull with major parts . . . . 75
5.8 Head injury risk curves . . . . 77
5.9 Compression between head injury curves for AIS3+ . . . . 78
5.10 Cart wheel with accelerometer unit . . . . 79
5.11 HIC crash testing setup. . . . 80
5.12 Exp. result: acceleration vs time without adaptable compliance . 81 5.13 Exp. result: acceleration vs time with adaptable compliance . . . 83
5.14 Testing setup. . . . 85
5.15 Exp. result: impact force vs time without adaptable compliance . 86 5.16 Exp. result: impact force vs time with adaptable compliance . . 86
6.1 Control disciplines in three different scenarios . . . . 90
6.2 Test setup. . . . 93
6.3 Polar plot: contact at link-1 . . . . 94
6.4 Exp. results: contact at link-1 . . . . 95
6.5 Polar plot: several contacts at link-1 . . . . 96
6.6 Exp. results: several contacts at link-1 . . . . 97
6.7 Polar plot: contact at link-2. . . . 98
6.8 Exp. results: contact at link-2 . . . . 99
6.9 Polar plot: contact at link-2 (reverse configuration) . . . 100
6.10 Exp. results: contact at link-2 (reverse configuration) . . . 101
6.11 Polar plot: contact at both links . . . 102
6.12 Contact at both links - human trapped situation. . . 104
6.13 Simultaneous contact at both links - human trapped situation. . 105
List of Tables
3.1 Comparison of MRF versus ERF. . . . 36
5.1 Abbreviated injury scale. . . . 72
5.2 Injury severity color coding. . . . 73
6.1 Adaptable compliance / variable stiffness control scheme. . . . . 92
ix
Introduction
1.1 Motivation
Robot manipulators are commonly used in the industries to perform several tasks such as pick-and place, assembling, welding, painting, etc., with high speed and position accuracy without sharing their work space with humans.
Current industrial robot manipulators are still very far from human robot (HR) coexisting environments, because of their unreliable safety, rigidity and heavy structure. Besides this, the industrial norms separate the two spaces occupied by a human and a robot by means of physical fence or wall [M.Nagenborg et al. 2008]. However, future generation of robots will have to share their work space with humans and to cope with tasks involving physical contact with hu- man under uncertainty in a stable and safe manner [J.Lenarcic 1997]. Clearly, the success of such physical human-robot interaction (pHRI) is based on ex- panding the robot’s capability to handle the interaction between the robot and the human or environment in smart way with high reliable safety to prevent injuries and damages.
In order to integrate robots into our daily lives, robots should have to demonstrate ideally the same level of capabilities embedded in biological sys- tems such as humans and animals. Human robot interaction (HRI) tasks de- mand robot’s direct collaboration with the humans, considering efficient safe motion. These tasks require close physical contact with humans and therefore safety is indispensable. One major skill in robots that lacks compared to biolog- ical systems is the absence of adaptable compliance or variable stiffness. This can be mimicked by using compliant actuators instead of traditional stiff ac- tuation mechanism. Furthermore, in achieving interaction tasks, motions have to be implemented by a robot manipulator, based on feedback signals. These tasks usually involve the combination of several motions from fully stiff to fully compliant. These contact situations may vary depending upon the specific re- quirement of interaction tasks, but in all cases, the robot has to execute three different modes of motion as follows:
1
1. Stiff motion:
Stiff motion refers to robot movement in free space referred as uncon- strained free work space. In this mode, reaching desired position task within the manipulator workspace is achieved by position and velocity control. It manifests zero compliance and therefore, only this mode is not sufficient for performing constrained motions with pHRI.
2. Soft motion:
Soft motion relates to robot movement constrained by an environment referred as constrained work space. The dilemma where collision is un- avoidable such as sudden, unexpected intrusion of an obstacle, this mode is activated by switching from fully stiff to fully compliant behavior.
3. Compliant motion:
Compliant motion represents all transitions between stiff and soft mo- tion. The situations often occurs in HRI tasks where human wants to superimpose its motion over the robot’s specified motion. These condi- tions elaborate the need of variable compliance in the robot and hence accomplished through compliant mode.
Recently robots have foreseen to work side by side and share workspace with humans in assisting them in tasks that normally include option for pHRI.
Numerous new trends and applications have been emerged in the field of robotics involving HRI, where robots operate in close vicinity to the humans and share common work spaces. Examples are rehabilitation and assistance robotic devices, legged autonomous robots and prosthetic systems. Although they differ on the basis of their specific type of interaction and require different set of design specifications, still they need to execute all the three modes of mo- tions (stiff, soft and compliant). In brief, for the advancement of new robotics trends, compliant, inherently safe actuator design mechanism and their con- trol strategies for integrating controllable stiffness are the major arguments of research and has to be investigated.
1.2 Overview
During HRI, compliant motion allows a robot to adapt to the interaction forces generated by the contact with the human or an object in the environment. Such a motion is necessary to reduce or overcome the uncertainties associated with the objects in contact and provide successful safe operation of robot.
The overview of the existing robotic constructions show that the joint actu- ation can be implemented in three different ways, namely by active compliance,
passive compliance and semi-active compliance. Respectively, we can say there are three different compliant devices:
Active compliant devices pose an enormous threat to the robot joint upon rigid impacts [T.Lefebvre et al., 2005, M.Kim et al., 2004] and also pro- vide a delayed contact response due to the time needed to process ap- propriate sensory data [S.Haddadin et al., 2007, T.Morita et al., 1999, S.Haddadin et al., 2008] e.g., feedback signals from force/torque sensors by the respective control system. In addition such scheme is characterized by high costs, unreliable safety-during electrical failure and needs com- plex control algorithms. Besides all these limitations, active compliance control is still acclaimed due to its high programming ability and due to its precise position accuracy.
Passive compliant devices based on passive mechanism like spring, sliding axles and knee joints, usually achieve the compliance on the cost of higher system complexity [C.M.Chew et al., 2004, B.Vanderborght, 2007]. Re- cently developed approach of variable stiffness actuation [A.Bicchi and G.Tonietti, 2004, T.Morita et al., 1999, B.Vanderbrought et al., 2006]
realized by having elastic element in the joints shows its effectiveness in compliance control while posing reduced position control accuracy and energy losses because of the elasticity. Mechanical compliance achieved by dampers ensures the safety only up to certain extent during pHRI.
Previously, friction brakes have been used as dissipative and coupling el- ements resulting undesired effects such as vibration, friction and slow response time [M.Reed 2003].
Semi-active compliant devices accumulate the main benefits of both active and passive actuation mechanisms by offering high operational accuracy, re- liable intrinsic safety and high bandwidth to the impacts. For example, they exhibit the same adaptability characteristic that is one of the fea- tured characteristic of active compliant devices without necessitating the use of high power sources, thus consume minimal amount of power. Like passive devices, they offer immense ability to minimize large forces and shocks, interact safely with the human and display high back driveability.
The previous studies on compliance were mainly focused on design methods for accuracy in accomplishing the defined robotic task and advanced control for safety. Even feasible in realistic conditions, this approach generally leads to both control and structural complexity.
1.3 Research objectives
Recent advancements in material technology enabled the design of strong, com- pact and light weight devices for several robotic applications such as prosthesis and rehabilitation robotics [W.Svensson and U.Holmberg, 2008, M.Haraguchi et al., 2007] and haptic devices [C.Mavroidis et al., 2006, 2004]. Therefore, we formulate the research objective to study the properties of semi active compli- ant actuation of a standard articulated robot manipulator and evaluate the level of impact safety in typical situations of pHRI. We propose a new solution using semi-active compliant devices, which aim achieving safety with inherently com- pliant components and simplified control algorithms. Controllable fluid based semi-active compliant device whose construction is using smart material inside the actuation mechanism is proposed for the realization of safe-pHRI. The com- pliance is rendered by controlling the rheological properties of these materials.
Electro-rheological fluids (ERF) and magneto-rheological fluids (MRF) are well known smart materials that reversibly change these properties when electric or magnetic field applied [M.R.Jolly et al., 1999, Y.Yang et al., 2009, L.Rui et al., 2003, M.Ahmadian and J.A.Norris, 2008, L.M.Jansen and S.J.Dyke, 2000, M.Haraguchi et al., 2007, J.Furusho et al., 2005, C.Mavroidis et al., 2006, 2004]. As MRFs have superior properties compared to ERFs, our MRF actu- ation mechanism is an assembly of MRF brake / clutch and DC-servo motor.
Compliance is controlled by the application of magnetic field while the posi- tion control is achieved by a standard DC motor control system. This results in much simpler compliance control algorithm compared to the compliance con- trol strategies used in active and passive compliant devices [M.Danesh et al., 2006, R.Carelli et al., 2004]. In fact, the entire robot construction becomes reconfigurable compliance/stiffness mechanism.
On the other hand, magnetic materials inherently pose a problem of mag- netic hysteresis [H.W.F.Sung and C.Rudowicz, 2003, M.L.Hodgdon, 1988, D.Jiles, 1998, J.P.Jakubovics, 1994, M.Kozek and B.Gross, 2005]. This effect is ignored due to small hysteresis property of MRF brake / clutch and due to our low torque service robot applications.
1.4 Expected contributions
The following contributions are expected to be achieved in this thesis:
• Introduction of novel actuation mechanism based on magneto rheological fluid incorporating variable compliance / stiffness directly into the robot joint.
• Development of actuator experimental model based on actuator static and dynamic response.
• Introduction of essential modes of motion for physical human robot inter- action to execute motion tasks in people present and to propose actuator analytical model defining each essential modes of motion.
• Implementation of simplified adaptable compliance / variable stiffness control scheme enabling successful human robot interaction compared to other antagonistic methods.
• Evaluate human robot safety performance during static collision by im- plementing adaptable compliance control scheme.
• Validate robot safety performance in dynamic collision testing with and without adaptable compliance using different safety performance mea- sures.
• Demonstrate the efficacy of the proposed compliant robot manipulator with high position accuracy as well as high static and dynamic human robot collision safety.
1.5 Publications
The contents of this thesis are partially reported in a number of conferences and journal papers. The complete list of publications arising during the PhD research studies are given as follows:
1. Ahmed, Muhammad Rehan and Ivan, Kalaykov, “Two link compliant robot manipulator for physical human robot collision safety”, In Proc.
International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC), accepted, to appear, Rome, Italy, 2011.
2. Ahmed, Muhammad Rehan and Ivan, Kalaykov, “Static and dynamic col- lision safety for human robot interaction using magneto-rheological fluid based compliant robot manipulator”, In Proc. IEEE International Con- ference on Robotics and Biomimetics (ROBIO), Tianjin, China, 2010.
3. Ahmed, Muhammad Rehan and Ivan, Kalaykov, “Semi active compliant robot enabling collision safety for HRI”, In Proc. IEEE International Conference on Mechatronics and Automation (ICMA), pp.1932-1937, Xian, China 2010.
4. Ahmed, Muhammad Rehan and Ivan Kalaykov, “Static collision anal- ysis of semi active compliant robot for safe human robot interaction”, In Proc. 12th Mechatronics Forum Biennial International Conference, pp.220-227, Zurich, Switzerland, 2010.
5. Ahmed, Muhammad Rehan, Anani, Ananiev and Ivan, Kalaykov, “Safe robot with reconfigurable compliance / stiffness actuation”, In Proc.
ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots (ReMAR), pp.603-608, London, UK, 2009.
6. Ahmed, Muhammad Rehan, Anani, Ananiev and Ivan, Kalaykov, “Com- pliant motion control for safe human robot interaction”, In Proc. 7th IEEE International Workshop on Robot Motion Control (RoMoCo), pp.265-274, Czerniejewo, Poland, 2009.
7. Ahmed, Muhammad Rehan, Anani, Ananiev and Ivan, Kalaykov, “Mod- eling of MR fluid actuator enabling safe human robot interaction”, In Proc. 13th IEEE International Conference on Emerging Technolo- gies and Factory Automation (ETFA), pp.974-979, Hamburg, Germany, 2008.
8. Ahmed, Muhammad Rehan and Ivan, Kalaykov, “Towards intrinsically safe robot manipulator for human robot interaction in anthropic do- mains”, To be submitted to International Journal of Mechatronics and Automation - IJMA.
9. Ahmed, Muhammad Rehan and Ivan, Kalaykov, “Adaptable compliance control of robot manipulator: A behavior based approach for safe pHRI”, To be submitted to Journal of Behavioral Robotics - PALADYN.
1.6 Thesis outline
The remaining contents of this thesis are as follows:
Chapter 2 presents the state of the art in actuation devices used for robotic tasks involving constrained motion and control related to the work pre- sented in this thesis. First we give a classification of the robotic tasks that require dynamic interaction of robot manipulator with its environment in terms of contact and non contact tasks. Later, we present a problem of adaptable compliant interaction in contact tasks together with an efficient solution by using semi active compliant actuation devices for high level of safety and performance accuracy in HRI. Similarly, we provide taxonomy of compliant actuators in terms of active, passive and semi active compli- ant devices as background information. In addition we briefly review the related work in the field of adaptable compliance and the methodologies employed by other researchers for safe HRI.
Chapter 3 describes magneto rheological fluid based compliant actuator, that is our approach to the problem of adaptable compliance for pHRI. First, the functional behavior of magneto rheological fluid in reversibly changing
fluid viscosity is described that forms the basis for our design of compli- ant actuator. Detailed comparison is provided justifying our preference of magneto rheological fluidic actuator over electro rheological fluid. Later, we discuss the peripherals and operational modes of magneto rheologi- cal fluid devices. We also present the design of magneto rheological fluid actuator and the analytical model in terms of magnetic field and shear mechanism modeling. The section is concluded by the formulation of ac- tuator experimental model based on static and dynamic modeling.
Chapter 4 presents the robot prototype used to conduct the experimental part of the thesis. We first present the modeling of our two link planar robot manipulator. Later, we describe the proposed model of the safe robot control system. The adaptable compliance control schemes used for per- forming interaction scenarios described in the thesis are implemented on the robot control computer in parallel with the motion control schemes.
We also discuss the entire robot sensor system used to capture the sen- sory information for the implementation of control schemes in different experiments. Finally, we conclude this section by presenting the details of dSPACE control hardware used for real time interface between the robot arm and the control computer.
Chapter 5 discusses the collision safety assessment of magneto rheological fluid based compliant actuator in pHRI. First, we discuss currently available ISO safety standard for robots in Section 5.1. Later, we shortly describe some of the recent work on collision safety in pHRI. The review of the related work suggests the development of ideally safe robot manipula- tor and put emphasis on redesigning more realistic safety standards for robots physically interacting with humans. Safety evaluation of our com- pliant actuator is conducted for static and dynamic collision testings.
In connection to static collision, in Section 5.2, we first present safety as- sessment on the basis of safety criterion proposed by Yamada and discuss the adaptable compliance scheme. Later in the same section, we present a series of tests with and without adaptable compliance. The robot safety performance is verified by the use of adaptable compliance scheme in keeping the robot within the safe region of operation for human robot interaction. Finally in Section 5.3, we present dynamic collision safety as- sessment based on head injury criterion and impact force criterion. Series of tests are performed with and without adaptable compliance evaluating human robot collision safety in terms of head injury criterion and impact force to demonstrate the effectiveness of our proposed method for safe physical human robot interaction.
Chapter 6 presents the compliance control and motion performance of mag- neto rheological fluid based compliant robot while performing several physical human robot interaction tasks. First, we present the capability
of our robot manipulator in realizing similar behavior as of a human muscle actuation by generating stiff, soft and compliant motion modes in Section 6.1. We also provide three interaction scenarios to simulate hu- man robot physical contact in direct and inadvertent contact situations in the same section. Next, we discuss the control disciplines for the joint actuators in these three interaction scenarios and implement much sim- plified adaptable compliance control scheme for achieving safe human robot interaction without causing any harm or injury to the human in Section 6.1.2. Finally, we present series of tests with proposed interac- tion scenarios and demonstrate the effectiveness of our compliant robot manipulator in motion performance and to achieve safe physical human robot interaction in Section 6.1.3.
Chapter 7 concludes this thesis with summary of the thesis, main contributions and some directions for future work.
Background and Related Work
In this chapter we present the state of the art in actuation devices used for robotic tasks involving constrained motion and control related to the work presented in this thesis. First we give a classification of the robotic tasks that require dynamic interaction of robot manipulator with its environment in terms of contact and non contact tasks. Later, we present a problem of adaptable com- pliant interaction in contact tasks together with an efficient solution by using semi active compliant actuation devices for high level of safety and performance accuracy in human robot interaction. Similarly, we provide taxonomy of com- pliant actuators in terms of active, passive and semi active compliant devices as background information. In addition we briefly review the related work in the field of adaptable compliance and the methodologies employed by other researchers for safe human robot interaction.
2.1 Constrained motion and control
A rigid body is an undeformable object and the system of rigid bodies such as links interconnected through joints is usually referred as multi-body system.
A joint or hinge connects two or more links at their nodes and imposes con- straints on their relative motion. If a joint connects only two links, the entity is also referred in the literature as kinematic pair. Joints can be classified as one, two, three degree of freedom (dof) joints etc., depending on the allowable dof for the kinematic pair. One-dof joint imposes five constraints, or alternatively provides only one relative dof. Mechanism where joints with higher order of dof is required, it can easily be realized by the combination of multiple one- dof joints, therefore, in robotics usually one-dof joints are used due to achieve simplicity in kinematic and dynamic analysis. The basic ideal joints used in multi-body systems include revolute (rotary or pin joints), universal (hooke’s joints), spherical (ball-and-socket joints), prismatic (slider joints), planar joints, cylindrical joints, and so on depending on the application.
9
Most present day, conventional perception of robots being designed to work only for dirty, dull and dangerous tasks has been changed dramatically with the emergence of new robotic trends and application areas. Currently, besides several other application domains, robots are especially designed to work side by side and share workspace with the humans in assisting them in tasks that include pHRI.
A typical robot system is composed of mechanical hardware (structure, links), electrical hardware (processing electronics), sensors (position, force, and torque), actuators and control computer. In general, execution of robotic task is performed such that the robot first senses information about its own state and about the environment. Then, processes this information and acts within the environment accordingly in order to achieve the goal. The dynamic nature of the environment imposes variety of different requirements concerning safety, robustness, reliability, quality of motion, speed, types of sensing, processing and actuation. Therefore, the selection of appropriate sensors and actuators is highly dependent upon the application and the operational environment of the robot. From now onwards in this chapter, we discuss mainly the actua- tor technology by summarizing various kinds of actuator devices employed for different robotic applications along with their merits and disadvantages.
In general, any actuation system contains at most four basic components namely; a power supply, an amplifier, a servo motor and a drive train (gear train / transmission). Servo motor is the most commonly used actuation device for producing mechanical action.
Actuator selection is highly dependent on the application and the environ- ment. For industrial robots performing manipulation tasks, some traditional metrics for actuator performance are; accuracy, bandwidth, robustness to en- vironmental conditions, response speed, cost, controllability, pressure density, power density, maximum force / torque capability (strength), stiffness, control- lability, scalability (size), safety and noise. Even realistic for industrial environ- ment and applications, these actuator selection criteria do not fully embrace the wide range of requirements needed for robotic applications with pHRI. Interac- tion between robot and the human is generally limited to safety and the ease of controllability. Therefore, human-centered robotic systems, require additional metrics that include back driveability, robustness to overloading, quality of tac- tile interaction, quality of motion, safety, ease of control and implementation in supplement to above mentioned conventional metrics.
Although biological systems such as animals and humans employ rotary joints as driving mechanism, the commonly executed motions by these systems are linear in the real 3D world. A well known SCARA (Selective Compliant Articulated Robot Arm) robot uses rotary joints while generating linear mo- tions. Therefore, it is agreeable to utilize rotary actuators as robotic driving mechanism, especially for robots which are intended to perform human like motions and / or to operate in human coexistence environment. From this view point, motion imposed to robot manipulator’s joint can easily be realized by
using rotary actuation oriented parallel to the axis of the joint. Thus, majority of human like manipulators are subsequently equipped with rotary actuators in their driving mechanism.
Due to their extreme utility and practical usage of actuators as driving mechanism, the quest for investigating stronger, powerful, reliable, simpler in design, easy to maintain and cost effective actuators is constantly increasing.
Despite the fact that several different kinds of actuators have been designed and manufactured, a lot of research is continuously going on for the advance- ment of actuator technology fulfilling the demands of ever increasing field of robotics.
The problem of controlling a robot manipulator in order to execute the commanded task is to determine the time history of the generalized forces (forces and torques) generated by the joint actuators while satisfying given per- formance and safety requirements. In view of problem complexity, the tasks involving interaction of robot manipulator with its environment can be divided into two main groups classified as non-contact tasks and contact tasks as shown in Fig. 2.1.
Figure 2.1: Classification of constrained motion and control.
2.1.1 Non-contact tasks
The robotic task in which the environment does not impose any related in- fluence (external force) on the robot manipulator and robot has to execute its specified motions in the free space belongs to this group. The examples of tradi- tional non-contact robotic tasks, frequently performed by the industrial robots are spray painting, gluing, welding, pick-and-place, etc. In this group, task ex- ecution is achieved by controlling the robot motion in unconstrained free work space without experiencing any interaction force externally on the robot and therefore, they are also referred as un-constrained tasks. Robot’s own dynamics plays an important role in the performance and execution of non-contact tasks.
The terms unconstrained or non-compliant motions are usually referred to non-contact tasks where the goal is to reach a specific position or to track
a predefined trajectory. Motion control in free space is normally realized by using non-compliant actuators also known as stiff actuators.
2.1.2 Contact tasks
Several manipulation tasks, from industrial environment to household environ- ment, where a close contact between the robot and the object in the environ- ment is indispensable belong to this group. While interacting with object, robot has to apply certain forces on the object and/or object in the environment ex- ert influence on the robot. In this group, task execution is normally achieved by controlling the robot motion in constrained work space with the influence of external forces exerted on the robot. Therefore, these tasks sometimes are also referred to as constrained tasks. Conventional examples include polishing, deburring, assembling and machining robots.
The term compliant motion is usually referred to contact tasks where the task objective (manipulator position) is constrained by the task geometry. For example, the task of sliding the robot manipulator along a table top, downward motion is prohibited. Similarly, rotational motion is not allowed for task of opening of a drawer, where, only the translational motion along the drawer’s axis is permissible. The respective downward and rotational motions in these two manipulation tasks are considered as the constraints, which are imposed by the task geometry.
During interaction, the use of a purely motion control strategy for control- ling the interaction forces is a candidate to fail. This is mainly due to imprecise modeling of the robot manipulator (kinematics and dynamics) and the envi- ronment (geometry and mechanical features). Although, manipulator modeling can be modeled with enough precision, but a detailed description of the envi- ronment is extremely difficult to obtain. Therefore, the successful execution of interaction tasks necessitates the use of compliant motions, allowing a robot to comply with the interaction forces generated by its contact with the object. It also offers the capability to cope with the uncertainties associated with objects in contact such as, geometric shape and relative locations and guarantees the successful completion of the contact task. Thus, compliant motion is an inte- gral element of an intelligent robot performing reliable, and efficient HRI tasks with uncertainty.
On the other hand, more and more advanced robotic applications concern- ing human-robot coexisted environments have been emerged such as, medical robotics, rehabilitation robots, robotic prosthesis, service robotics, legged hu- manoids etc. Rigid and precise motion as that of the industrial robots may not be the desirable in a robot intended to interact physically with the human. These applications require robot motion to be convincingly organic, such that, robots demonstrate smooth, quite, safe and fluidly motion and maintain their oper- ational pace within the human operating limits. Further, robot motion must be compliant enough to make the interaction task convenient and comfortable
while eliminating the fear / danger factor. In addition to this, it is extremely important that the human be able to physically guide the robot or its end ef- fector without big effort or force, which is referred as back-driveability. High back driveability plays a crucial role in the fulfillment of successful interaction task in human coexisted environment enabling the robot motion sensitive to, aware of and congenial to the touch of a human. Direct pHRI is inherently an essential part of the task in all these new robotic trends. This calls for the design of more feasible methods, techniques, strategies and schemes in realizing robot compliant motion suitable for pHRI.
The fundamental requirement for the success of interaction task (con- strained motion task) is the capability to handle interaction between the robot manipulator and the environment. The quantity that describes the state of in- teraction more effectively is the contact force. High values of contact forces are generally undesirable since they may stress the robot manipulator and the manipulated object in the environment.
It is worth mentioning that the constrained motion tasks usually involve dynamic interaction between robot and the environment, which can not be es- timated (predicted) accurately in advance. Therefore, the solution for successful interaction with the environment lies in controlling the compliant interaction.
This can be realized either, by monitoring and controlling the contact forces (interaction forces) through control system design or by enhancing / adjusting system design properties mechanically such that, the required level of safety and performance is ensured for pHRI.
From the psychological point of view, compliance refers to the act of re- sponding favorably to an explicit or implicit request offered by others. Simi- larly, in the context of robotics, compliance can be considered as a measure of the ability of a robot manipulator to react onto the contact forces. The prob- lem of implementing the adaptable compliance capability into robots has been investigated all over the world. The biological inspiration gives the solution to the problem that is to implement the compliance into the joints of the robot manipulator.
2.2 Compliant actuation devices
Tasks involving precisely control interaction with the environment such as as- sembly operations, dual arm manipulation or any pHRI are very difficult to per- form without having the compliance property. Therefore, providing the robot manipulator with adequate adaptable compliance is an important step in the development of the robots. This can only be realized by the use of compliant actuation devices that are specially designed for driving their joint mechanism.
In general, these compliant actuation devices can be classified into three groups depending upon the method of implementing adaptable compliance. The block diagram shown in Fig. 2.2 describes the classification tree indicating active,
passive and semi-active compliant devices along with their different design ap- proaches used for realizing the interaction control in constrained space.
Above mentioned three groups of compliant actuation devices have their own merits. The pros and cons of several compliant actuator designs build in each group will be discussed later in the following sub sections.
Figure2.2:Classificationofcompliantactuationdevices.
2.2.1 Active compliant devices
Active compliant systems are computer controlled systems where compliance characteristics can be implemented through software control. Generally, active compliant devices composed of speed controlled joints, geared transmission and the compliance property is achieved through sensor based control system involving force-torque sensors. The designed control system for compliant be- havior actually mimics the behavior of human muscle or a spring and thus responsible for implementing adaptable compliance at the robot joints. The basic advantage of active compliant devices originates from the fact that the controller can vary the compliance online during the normal operations and in this way, adaptable compliance can easily be implemented by online tuning.
Since, this method of of realizing adaptable compliance is heavily dependent on software control / sensory system, therefore, they are usually computationally expansive. Furthermore, since these devices do not have any elastic component, no energy can be stored in the actuation system and no shocks can be absorbed due to limited bandwidth associated with the controllers. However, active com- pliant devices offers high programmability in compliance control.
Several approaches using active compliant devices for robot compliance have been proposed in the literature. A brief survey of well known design tech- niques based on active compliance is outlined in this section along with their significant strengths and weaknesses.
Hydraulic actuators
Most of the conventional robots are equipped with hydraulic actuators for pre- cise position control. Hydraulic actuators typically consists of pressure source and a control valve to control the fluid flow. Control valve is operated through control current allowing the fluid to flow. In case of linear actuators, the rate of fluid flow through the control valve is directly proportional to the applied current. Control valve is responsible to directs the pressurized fluid into one of the two chambers where it is used to derive the piston. In this way, mechanical motion is realized by controlling the fluid flow. Thus, with this configuration hydraulic actuator are quite good for precise control.
Since hydraulic actuator based systems operate efficiently at high force (re- lating to high pressure usually 20.68 × 106 Pascals and above) and low speed (corresponding to flow rate), these actuators are ideal for industrial robotic applications such as construction robots, automobile steering robots and air- planes. Moreover, they offer highest power density compared to all other con- trollable actuation designs while consuming minimal power [J.Hollerbach et al.
1991]. Nevertheless, there are several weaknesses to hydraulics as well. These include system complexity, high output impedance and non linearity from a control point of view.
All fluids are compressible to some extent, but traditionally used hydraulic fluids such as oil and water exhibits low compressibility and therefore they are usually modeled as incompressible. Due to the fluid flow controlling via control valve and fluid incompressibility, hydraulic actuated systems exhibits high output impedance. This restrict the usage of hydraulic actuators for force control while considered best for motion control. Similarly, the requirements of pressure source and valves provide the complexity in actuator design. An- other limiting factor of non linearity comes from their characteristics such as hysteresis, fluid internal leakage and pressure threshold etc.
However, some attempts have been made to overcome the difficulties that restrict hydraulic based actuated systems to be used in more sophisticated contact tasks in robotics. These includes better mechanical design and im- plementing advanced control algorithms. In order to cope with inherent non linearity associated with hydraulic systems, [A.Alleyne 1996] proposed a non- linear Lyapunov based hydraulic piston adaptive force controller to handle time varying parameters depending upon temperature variations. [M.Pelletier and M.Doyon 1994] proposed another control based approach for controlling hy- draulic impedance and implemented on industrial robot, but it exhibits reduced position accuracy and limited actuator bandwidth resulting in chattering effect while in contact with semi stiff environment. In general, force control of hy- draulic actuators is a difficult problem to solve [F.Conrad and C.Jensen 1987]
and therefore, restricts its utilization in robotic applications involving pHRI that require high safety norms.
Pneumatic actuators
Pneumatic actuator transforms energy typically in the form of compressed air into motion. The motion can be linear or rotatory depending on the type of the actuator. These actuators mainly consists of a piston, a cylinder and a valve / port connected to a gaseous pressure source. Piston inside the cylinder is moved by the action of compressed air, resulting in the development of the force which is based on the pressure of the compressed air as well as the dimension of the cylinder. In this way, air pressure in a piston chamber converts the piston into a force compliant actuator.
Pneumatic actuators are similar to hydraulic actuators but with a significant difference that originates from their working principle based on compressed air instead of fluid flow. The inherent characteristic of air compressibility provides an edge to pneumatic actuators over hydraulic ones that enables their applica- bility in designing compliant actuation devices for robotic tasks involving inter- action with the environment. Unlike hydraulic actuators, they usually operate at relatively low pressures of 689.46 × 103Pascals. Pneumatic actuator can op- erate with higher pressure levels but due to its high energy storage capacity in terms of compressed air, it is usually avoided for the safety reasons.
On the other hand, pneumatic actuators exhibits several limitations espe- cially in terms of their thermodynamic effects and potential resonance. Contin- uous air compression and expansion causes the system to heat and cool dra- matically exhibiting the effect of thermodynamic. However, with smart design configurations it is possible to overcome this problem. Furthermore, inherent compliance of pneumatics can also resonate with robot link inertias. Therefore, these devices require intelligent damping control schemes to be implemented in order to maintain stability which results in more complex control algorithms.
In addition pneumatic actuation devices also require compressed air genera- tor and pneumatic cylinders which make the system mechanically complex and increase overall dimensions.
McKibben muscles is one of the most popular variation of standard pneu- matic actuator configuration [B.Tondu and P.Lopez 2000]. It has an inflatable elastic tube covered by a flexible braided mesh. In pressurized mode, the elastic tube expands but is constrained by the mesh resulting in the contraction of the flexible mesh similar to a human muscle. McKibben muscles have both series and parallel elasticity which shows their effectiveness in mimicking the passive behavior similar to biological muscle [G.K.Klute et al. 1999]. Several attempts have been made such as pleated pneumatic artificial muscle (PPAM) to design artificial muscles with similar capabilities that of a human muscle. However, there are still some hurdles that must be overcome. Since pneumatic actuation devices are intrinsically compliant, one would hope that future development of these devices will make them more competitive in realizing adaptable compli- ance characteristic and will be used for advanced robotic tasks involving HRI.
Electromagnetic actuators
Majority of robotic actuators in use today consist of some form of electro- magnetic (EM) motor with a transmission. EM motors are easy to model and control because they exhibit linear response. In the simplest model, the torque of the motor is directly proportional to the input current. Transmissions, on the other hand, are not linear.
Electromagnetic motors offer high power densities and low output torque with high speeds in optimal operating conditions. This is the reason why, for driving the robotic joint, significantly smaller electromagnetic motor is required to generate the same level of output power as delivered by the human muscle.
However, the applications where high torque / force with low speeds are re- quired, the use of drive trains with high transmission ratios are pre-requisite which allow optimized transfer of mechanical power from the motor to the joint. The purpose of having a drive trains is to increase the force and power density of the actuator. This allows the EM motor to run at peak efficiency oper- ating conditions (high speed and low torque) while the EM actuators generates high output power at low speed and high torques. On the other hand, these transmissions usually introduce back lash and stiffness in the driving mecha-
nism, resulting in control problems while increasing the mass and the volume of the system. In addition to this, a large transmission ratio also implies high sus- ceptibility to breakage and contributes to ripples in output generated torques.
EM motors by themselves are typically easy to back drive and offer low impedance. This means a small external torque applied on the motor shaft will cause the motor to accelerate. In case of EM actuators, the large transmis- sions provide high friction and increased reflected inertia, which significantly make these actuators more difficult to back drive. To overcome these diffi- culties, [H.Asada and K.Y.Toumi 1987] created a direct drive actuators and robots. The use of direct-drive eliminates the transmission and connects a DC brushless motor directly to a robot link. With this construction, they have de- veloped force sensitive actuators and eliminated the problems of friction and backlash. Advanced torque sensors in the actuators have added to the capabil- ities of direct-drive robots. However, due to loss of transmission, direct-drive actuators must be large in order to achieve high torques. In weight and power sensitive applications such as service robots, direct-drive actuators are often unacceptable.
To improve force and power density of EM motors without scarifying force sensitivity, studies have been done to develops stiff, low-friction, light-weight cable transmissions [W.T.Townsend and J.K.Salisbury 1989]. These transmis- sions offer zero backlash and high power efficiency due to their high tensioning in the cables. Cable transmissions have been used on several robots such as whole arm manipulator [J.K.Salisbury et al. 1988], PHANToM [T.H.Massie 1993] Robotuna [M.S.Triantafyllou and G.S.Triantafyllou, 1995, D.S.Barrett, 1996]. However, because of the size constraints of pulleys, cable transmission can only achieve moderate transmission ratios.
Torque controlled joints
[D.Vischer and O.Khatib 1995] suggested active compliance based joint torque feedback control mechanism with low gear ratio transmission for achieving high back driveability. However, this approach is not very effective in reducing impact loads at the frequencies above the control bandwidth.
Parallel micro macro actuator
Unlike micro macro actuators coupled in series, the concept of parallel micro macro actuator was initially proposed by [J.B.Morrell and J.K.Salisbury 1995]
where two actuators are connected in parallel for achieving improved force resolution and bandwidth. High power macro actuator coupled via compliant transmission to the joint axis contributing low frequencies / high amplitude forces where as micro actuator which is directly connected to the joint axis is used to control high frequencies / low power forces. Although, the approach of micro macro actuators offer better performance in terms of force control as
compare to single actuator systems but the presence of two different actuators makes the system more complex and difficult to implement.
Distributed macro mini actuation
Distributed macro mini actuation approach proposed by [M.Zinn et al. 2004]
is similar to the parallel micro macro actuator concept. Both high performance and safety can be integrated into manipulation system by drastically reducing the effective impedance of the manipulator while maintaining high frequency torque capability. For reducing the effective impedance, a pair of actuators connected in parallel are distributed to different locations on the manipulator which consequently reduces the effective inertia as well as the overall weight of the manipulator. In order to realize high frequency torque performance, low fre- quency actuator is collocated with the manipulator joint. In this way, the gener- ated torque is divided into low and high frequency components and distributed along the manipulator in such a way that their effect on contact impedance is minimized while their contribution to control bandwidth is maximized. This is normally realized by placing low frequency series elastic actuator remotely from the high frequency joint actuator. In order to reduce substantially the impact loads associated with uncontrolled collision, [M.Zinn et al. 2004] lo- cated low frequency macro actuators at the base where as high frequency mini actuators at manipulator joints. Although distributed macro mini actuation ap- proach is very promising in the development of human friendly manipulators, but it presents some disadvantages due to the use of a large, heavy DC motor and coupling spring as the macro actuator. In addition to this, this approach also suffers with complex mechanical design and interaction control schemes.
Discussions
Active compliant devices [T.Lefebvre et al., 2005, M.Kim et al., 2004], pose an enormous threat to the robot joint upon high speed rigid impacts [S.Haddadin et al., 2007, T.Morita et al., 1999]. This is mainly because of the model inac- curacies, limited sensor precision and motor saturation. In order to take care of this problem, fast collision detection and reaction schemes are needed for the robot joint safety that results in complex control algorithms. Moreover, active compliant devices also provide a delayed contact response due to the time needed to process appropriate sensory data (for example, feedback signals from force / torque sensors) by the respective control system that consequently results in slow dynamic response. Furthermore, the size and weight of the robot manipulator increases because of the smaller power to weight ratio of the joint actuators. In this way, safety during unexpected collision with the obstacles or humans in an unpredictable environment can not be guaranteed by using active compliant based robot manipulators. In addition such scheme is characterized by high costs, unreliable safety during electrical failure and needs complex con-