$ * Us k 3 2 S » 3 å R m 2 5 2 . A 2 3 % 5 $ $ Sta e t 2 ä a $ & K i 2 3 $ i i ä & - 5 2 x v k 21 Ps & er p å i R f i 2 % i 3 % f F , Z f i i $ $ / ä ; 2 i k 5 p f 3 2 t k $ 4 £ ; 3 i Ks 4 ; k > i A ; . ä t asd $ i ä i d $ % k 2 s ä $ S 4 f *8 2202 2 sökt ag3 S* i & 4 i i 2 E i 3 f 2 + Z ( i 5 2 5 & % å 2 #4 i . 3 sä & $ i % ä 3 k å id P s x 5 $ $ å i 44 i mr (t & $ 2 % l. k i * 2 Foder Bra * $ ; A 0 . $ $ 2 $ 3 + n dä 5 å ; > * k kor 's v k & J å tta x S» - i å ig $ dls 3 2 % 3 e 8 ' 4 5 Ske P G f t i $ 4 ; y |. % k - * 2 2 u 3 k i ; . 4 Föll 2 ' se 59 y u t Te $ röde t s s K K ; - Mes) Fk TL sv ie _ $ f a t) s SS X 2 : / n & 5 S2 m kt k £* %Sv 5 23ä äl ts » l >» 3 $ h M & le k k Gök $ älg å i S 3 7 delete f 3 FY $ 2 % $ ödet i Se" bs $ $ SK $ f R > i S 2 i ig å f 4 * * $ P # x > x 3' R b» 9 F 2 + % $ > fys bell & 14 29 *
5 5 % k 25 3 2 5 4 äl ige! d $ f ad x 2 $ m 5 & s % 2 v f 2e 4 4 i FZ $ iF P & än 4 f % 5 225 19 x 2 fö å $ % 2 Nl 3 2 $ 4 20 k ä R St. 5 Sf 3 J > # $ . i s fe #11 + x 5 4 xt * i jade a S 5 i $ P i ä i i f 3 % SZ % f ; s2 k f f &+ 3 ' ä % N s v x k 402äti 2i i $ $ lk & K 3 5 f f f i lät. t 4 3 : ä 4 24% t $ * d k h 3 % ä % $ 227, 4 å kalt * ä å % 5 $ s ntse pe e ä #8 4 & Er Set e stl i % 5 3 2 f 4 f. t 0 18 äE. t s s xy ä Sok je1 as f * f S 4 3 2 ä ; 3 kW i å å i ög -så &t$ x p % sl 4 $ $ 5 & - % ig # k 2 $ s f + V: % + % P ä39 k ; $ n k $ Pcn k h 3 i P v 2 % * 4 3 k
2 il Buk iP. sur f + % pd P
it 2 Jea f , X P setts 5 - 22% ; % ön HK Has ha 4-8 t > 12% t Ae *. Y . sg P % i X. % Poe j e. 2 Sf & gatt ck 1 / f ' , el lst 2 SPDT # Aa g a - ; + > s i a v 2 f 2 © rex # é i- 23 i S $ $ s $ ät v 32 y & 5 p &25> 4 så vg © Z $ i $ k 2 k 2 ; $ f å 2 N i k $ f % * 3 k x 22 % % k ki f* u 2 3 x 1 # 4 i $ + v % a % k i 5 . A ; s sk i ig $ s 4 2 x a s S 4 1 $ s 2 $ 3 $ & # P k & + 2 E 3 i f 3 4 * t -a > k>v4ös e 4 & ___ Examensar junnar Bunis av v k / i ock % H 9 A s Fx F8 ese institut - Fack- 5810 arch Institute - Fack - S-58101 Linköp
å ä ' i 2 225 s ; i k 4 F 2 . £ 5 % 2 ; & 158 ä 3sm + ä 4 E f k * 2 s å % ; % fule lik 220 3 ; ' 4 f * & e i * - ; 5 s y tk å vi / a k 2 29 + & + ev s $ 2 $ . % & 5 $ å $$ s $ x% å .s / SM: % >- 35% & # 4 4 sä is 23 f Piss r 11 ä "SS .:»! 20/3 ä 2 h v 2 ä f X +- Ck 3 ; fa k & y B ms S nise $ ä , jer" 1v% 3% > k $ i + % h 5 * $ å r i f & (> a Å 4 si k 1 $ © P > + E 2 3 - tå 2 4 2 % $ k . 4 l $ Sve 4 sd f i E Eu S ys 3 ät; % s p at0 gr _ R % # 13 % eld 2 s 1 i # é * %. C i 19 X 4 $ $ 8 f $ ä ty i f $ ik 2 e p 2 i k 3 3 x f k v 5 2 i k h » 5 * $ (2 ; ä f k 8 $ A S _ Ja$ ' 4 % 3 k 1 k = + f i t h ä Nu Rc s i 3 & 4 $ X s RS) i 5 Få 4 X f dör v 3 % i % % R-d & v j å * $ 1 f i # k $ kx s A Me k & k 2 Sui * e 5 & 5 * Ac för 4 4 k K 5 20 ing å | y i 3 k % 5 3 % -Sweden : y m $ ah HSN 3, Ps + 4 y 8 410 l £ degr c "ä > 3 y i
114
Fjädrings- och dämpningsegenskaper hos
enaxliga släpvagnar
Examensarbete i Fordonsteknik
donsteknik, som är ett speciallärarämne vid institu-tionen för maskinelement på Tekniska Högskolan (KTH) i Stockholm.
Arbetet har bekostats av statens trafiksäkerhetsverk (TSV) och har utförts vid statens väg- och
trafikinsti-tut (VTI) i Linköping.
Vi vill här passa på att rikta ett varmt tack till de
som medverkat vid utarbetandet av denna rapport, och då speciellt:
Gösta Kullberg och Olle Odsell, handledare på KTH respektive VTI, för många klargörande och värdefulla diskussioner under arbetets gång,
Staffan Nordmark, som varit till stor hjälp vid upp-ställandet av den matematiska modellen, och
1 INLEDNING 1 2 FJÄDER-DÄMPARSYSTEMETS INVERKAN PÅ TRAFIK- 2
SÄKERHETEN
Allmänt
Val av undersökningsmetodik 4
MATEMATISK MODELL
Val av matematisk modell
Härledning av systemets rörelseekvationer 7
. Modifieringar av modellen ll
FÄLTFÖRSÖK 17
Allmänt 17
Provningsmetod l7
. Resultat 19
Jämförelse mellan datorkörningar ooh 22
fältförsök
DISKUSSION 34
5.1 Fjädringens och dämpningens inverkan på 34
väghållningen . Möjliga mätmetoder 39 Slutsatser 42 REFERENSER 45 BILAGA 1 BILAGA 2 BILAGA 3 BILAGA 4 BILAGA 5
av Gunnar Bunis och Leo Mäkiaho
Statens väg- och trafikinstitut
Fack
581 01 LINKÖPING
SAMMANFATTNING
Syftet med detta arbete är att ge ett underlag för bedömning av vilka fjädrings- och dämpningsegenskaper som ur trafiksäkerhetssynpunkt är önskvärda på en enaxlig släpvagn.
Eftersom både sidkraftsupptagningsförmåga och broms-förmåga beror av normalkraften mellan däck och vägbana, är det ur trafiksäkerhetssynpunkt av stor vikt att en
så stor normalkraft som möjligt upprätthålls. För att undersöka fjäder-dämparsystemets inverkan på
normal-kraftens variation vid passering över ojämnheter i väg-banan,utvecklades ett dataprogram för simulering av släpvagnens rörelser i vertikalplanet. Dataprogrammet bygger till vissa delar på ett tidigare examensarbete,
"Simulering av fjädersystemet på friktionsmätvagn BV ll", VTI Meddelande nr 52. Modellen består av två kOpplade
svängarmar, representerande vagnens chassi resp hjul plus bärarm, med frihet att rotera i vertikalplanet.
Modellen är alltså tvådimensionell. I modellen kan två
påtvingade rörelser införas, en för kopplingSpunkten mellan dragfordon och släpvagn och en för släpvagnens
hjul. Rörelserna bestäms av två kopplade
differential-ekvationer. Detta ekvationssystem löses numeriskt med
hjälp av Runge-Kutta-metod. Resultaten fås i form av
vinklar, vinkelhastigheter och vinkelaccelerationer
som funktion av tiden, vilka omräknas till
normalkraf-ten mellan däck och vägbana.
Vid sidan om utvecklingen av dataprogrammet utfördes I fältförsök dels för att få en uppfattning om
fordons-kombinationens beteende vid körning över ett hinder, och dels för att kunna göra en uppskattning av data-programmets validitet. Två olika släpvagnar testades, en med ståltorsionsaxel, och en med gummitorsionsaxel. Jämförelser mellan datorkörningar och fältförsök visade att modellen i stort gav en bra bild av verkligeheten.
Med utgångspunkt från ett väghållningskriterium gjordes
med hjälp av dataprogrammet en systematisk undersökning av olika fjäder- och dämpkonstanters inverkan på väg-hållningen. Resultaten från denna undersökning tyder
på att mjukare fjädring än vad som i dag används på släpvagnar skulle leda till bättre väghållning vid
passage av ojämnheter i vägbanan. Mjukare fjädring
ställer dock högre krav på dämpning och på
hjulupphäng-ningens utformning, bl a avseende krängstyvhet. Fjäd-rings- och dämpningsegenskaper kan ej bedömas var för sig, utan det är kombinationen av fjädring och dämpning som avgör släpvagnens vägegenskaper.
Avslutningsvis diskuteras några olika mätmetoder för bedömning av fjäder-dämparsystemet hos fordon. Bl a redovisas resultat från ett enkelt försök där släpvag-nen hissas upp ett stycke ovanför underlaget och därefter släpps. Under försöket registreras infjädringsrörelsen som funktion av tiden. Det är tänkbart att denna metod efter utveckling skulle kunna användas till att enkelt kontrollera att släpvagnar uppfyller vissa grundkrav
på fjädringsväg och svängningsdämpning.
personbilsbruk och det nyregistreras ca 25 000.st varje år. Eftersom släpvagnarna utgör ett betydande inslag i trafiken är det viktigt att de i kombination med drag-bil uppfyller vissa fundamentala krav på väghållning
och bromsförmåga.
Väghållning och bromsförmåga är till stor del beroende på utformningen av vagnens fjädring och stötdämpning. Bestämmelser för hur hjulupphängningen för en släpvagn ska vara konstruerad finns dock inte i Sverige. Enligt Tsve typbesiktningshandbok Ska"tillfredsställande fjäd-ringsanordning finnas mellan hjul och chassi. Beroende på ijäderkonstruktion kan som regel fjädringsanordningen inte anses tillfredsställande om den inte är försedd ved avpaesad stötdämpning."
I många andra länder godkänns Vissa fjädringstyper, bl a gummitorsionsaxlar, utan stötdämpare; med hänvis-ning till att fjäderelementet i sig självt har till räoklig egendämpning.
I samband med en provning vid VTI av dämpningsegenskaper hos en gummitorsionsaxel med respektive utan stötdämpare, uppstod frågan vilka fjädrings» och dämpningsegenskaper som är önskvärda på en enaxlig släpvagn.
Det finns i dag inga erkända provningsmetoder för bedöm-ningen av fjäder och dämpningsegenskaper ens hos bilar, utan beslut om huruvida hjulupphängningen godkänns eller ej baseras huvudsakligen på subjektiva bedömningar.
Nämnas kan att i ett fall har en husvagn underkänts vid typbesiktning av TSV med motiveringen att den hade för hård fjädring. Något absolut gränsvärde för när fjäd»
vagn. Om möjligt Sia också en enkel provningsmetod för bedömning av dessa egenskaper kunna anges.
FJÄDERwDÄMPARSYSTEMETS INVERKAN PÅ TRAFIKSÄKERHETEN Allmänt
Sambandet mellan sidkraftsupptagningsförmåga S och hjul-belastning P har ett ungefärligt utseende enligt figur 1.
\ 120 86 4% U Ä" '7 J 91 "är" 200 300 400 P (kp)
Eigur_l. Exempel på samband mellan sidkraftsupptagningsw förmåga 8 som funktion av hjulbelastningsn P
vid några olika avdriftsvinklar. (Däck: 6.40"13)
Eftersom både sidkraftsupptagningsförmåga och broms* förmåga är beroende av kontaktkraften mellan hjul och vägbana är det av högsta Vikt att kontaktkraften hela tiden är så stor som möjligt. För detta ändamål bör systemets ofjädrade massa (dvs hle + delar av hjuluppm hängning och fjäder) ha så hög egenfrekvens som möjligt. Härigenom kommer hjulet snabbt att fjädra ut efter det
'att en ojämnhet passerats. På så sätt kan alltså
kon-2
egenfrekvens hos systemet fås om förhållandet
fjäder-konstant/massa är stort. Samtidigt bör fjädern vara så
mjuk att så lite som möjligt av rörelsen hos den ofjäd-rade massan överförs till chassit, dvs den fjädofjäd-rade massan, eftersom svängningar hos denna också leder till variation hos kontaktkraften mellan hjul och vägbana.
För att uppfylla båda dessa krav bör förhållandet
fjäd-rad massa/ofjädfjäd-rad massa vara så stört som möjligt. När fjädersystemet utsätts för en störning kommer detta i svängning. För att denna svängning inte skall fortsätta efter det att störningen upphört, behövsvad man i dag-ligt tal kallar stötdämpare. Denna benämning är egen;-ligsn missvisande, eftersom dämparen ingalunda dämpar stötar. Vad den gör, är att den dämpar svängningar. En bättre benämning är därför svängningsdämgare.
Svängningsdämparen har två uppgifter, dels att dämpa hjulets rörelser och dels att dämpa chassits rörelser. Eftersom hjulets rörelser har en betydligt högre :fekn
vnns än chassits måste dämparen verka tillfredsställande
inom två olika hastighetsområden. Dämpningen får å andra sidan inte väljas för hård, då fjädern i sådana fall
lir verkningslös. En större del av fjädringen kommer
1-".-s
RUM
b
då att ske i däcket vars dämpning inte lika lätt kontrolleras.
Chassits rörelser har inte bara betydelse för normalkraf*
ten mellan hjul och vägbana. Är fordonet en personbil
är det kravet på komfort som avgör vilka rörelser som kan tolereras. För lastfordon som t ex släpvagnar har .man inget komfortkrav. Däremot är det från
trafiksäker-hetssynpunkt viktigt att chassits rörelser inte är så häftiga att lasten kastas av. Stora accelerationer hos chassit kan också leda till brott hos t ex ram eller
fjäderelement på grund av höga dynamiska påkänningar.
h)
fordonet utsätts för sidkra ter. Detta kan i sin tur ge upphov till styreffekter p g a t ex camberändring hos hjulen, beroende på hur hjulupphängningen rent geometriskt är konstruerad. Krängningen kan dock
mot-verkas med hjälp av krängningshämmare, varför fjädringen inte nödvändigtvis behöver dimensioneras efter detta.
Den krängningsdämpning som finns härrör dock nästan uteslutande irån svängningsdämparna. För en fordonsw kembination kan låg krängningsdämpning hos släpvagnen
leda till att släpvagnen eller hela fordonskombinatiow nen kommer i självsvängning.
Val a; ridersökningsmetodik.--.
4...-En fullständig undersökning av ett fordons fjädringsw ch dämpningsegenskapers inverkan på trafiksäkerhetes ÄIäVwi att man undersöker alla de fall av påtvingade
rå ;äger som fordonet kan utsättas för och vilka rörelser detta resulterar i för fordonet. Vidare måste man under» söka om, och i så fall i vilken omfattning dessa ;örelw ser har betydelse för trafiksäkerheten.
ör fordonskombinationen dragbil och enaxlig släpvagn -der en sådan analys till ett mycket omfattande arbete.
i" L!
I detta arbete har därför valts att vid analysen använda en tVådimensionell modell i vertikalplanet parallellt med körriktningen och begränsa undersökningen till släp-vagnen. Man kan då undersöka hur Chassits och hjulets rörelser liksom normaltraften mellan hjul och vägbana varierar vid körning över ojämnheter. Detta gäller under förutsattning att inga störningar verkar på for" donet i sidlee samt att ojämnheterna är lika i tiden för vagnens bägge njuli Eftersom sidkraftsupptagnings"
-_* - m-. ...in .Tf'-,,., - . s ._ ,av , ., , , .... . 1 ;4 . °
Figur 2.
hjulet till det andra. Detta medför p g a det icke lin-jära sambandet mellan normalkraft och sidkraftsupptag-ningsförmåga att den senare ytterligare försämras. För vart och ett av hjulen skulle dock modellen fortfarande
gälla.
MATEMATISK MODELL
Val av matematisk modell
För teoretisk analys av det dynamiska förloppet hos en enaxlig släpvagn vid passering av oregelbundenheter i vägbanan, krävs en matematisk modell av släpvagnen. Som tidigare nämnts i kapitel 2, kommer analysen att inskränka sig till rörelser i vertikalled. En
tvådimen-sionell "enspårsmodell" är därför tillräcklig för att beskriva rörelsen. Åtminstone två tänkbara alternativ till modeller finns.
I den enklaste modellen betraktas vagnens chassi och hjul som två massor sammankopplade med en fjäder och en dämpare. Dessutom är hjulets massa i sin tur kopp-lad till underlaget via ännu en fjäder och en dämpare.
(se figur 2).
m1
r_I_I
m T
T
7////
dvs kopplingspunkten mellan släpvagn och dragfordon, och dels hos hjulen som på de flesta släpvagnsaxlar är kopplade till chassit via en svängarm. En mer kompli-cerad modell enligt figur 3 ger därför en noggrannare bild av det verkliga förloppet.
Figur 3. Modell av släpvagnens ram, samt hjul med svängarm
Denna modell utgörs av två kopplade svängarmar med
massorna mO resp ml och tröghetsmomenten IO resp Il kring sina respektive tyngdpunkter. Den ena svängarmen representerar vagnens chassi, och tillåts rotera i figurens plan kring punkten AO,som motsvaras av drag-fordonets draganordning. Denna punkt kan ges en på-tvingad rörelse i vertikalled för att representera dragfordonets rörelse. Den andra svängarmen represen-terar hjulet med dess svängarm, och tillåts rotera i planet kring punkten Al som är fast förbunden med
I modellen har vissa väsentliga förenklingar jämfört med verkligheten gjorts:
o Plan rörelse förutsätts, dvs krängning av vagnen
'
o Hjulens två svängarmar är sammanslagna till en sväng-arm.
o Modellen gäller endast vid måttliga svängningar då approximationen små vinklar införts, dvs sin9==6
cose = 1.
o Modellen för däcket utgörs av en fjäder och en dämpare.
o Däckkontakten sker i en punkt som sammanfaller med en vertikal linje genom hjulets centrum.
o Rörelsen hos hjulets svängarm begränsas endast av fjäder- och dämpkrafter, dvs inga tvångsvillkor för dess ändlägen har införts.
Härledning av systemets rörelseekvationer
De två svängarmarna har vardera frihet att rotera kring en axel. Systemet har således två frihetsgrader.
För att beskriva dynamiken hos systemet krävs därför
två ekvationer. Dessa två rörelseekvationer bildar ett
system av andra ordningens differentialekvationer med
lika antal ekvationer som obekanta, 60 och 6l'
liserad koordinater erhålls två rörelseekvationer, en
för hela vagnen och en för svängarmen medhjul. Vid härledningen av ekvationerna förutsätts linjära
fjädrar och dämpare. Att någon negativ normalkraft inte kan tas upp av däcket lämnas också vid härledningen
utan beaktande. Vid den senare numeriska behandlingen
kommer dock ekvationerna att modifieras så att modellen
gäller även för eXponentiell fjäder- och
dämparkarak-teristik. Då förs även in möjlighet för hjulet att lyfta från marken varigenom kraften mellan däck och
vägbana blir lika med noll, istället för negativ som
ekvationerna visar.
Lê92ê2q§:§_§52ê3i92
Lagrange's ekvation får i detta fall följande utseende d öTe _ öTe + GV + öR _ 0
EE_ ?§7
löq.
l55.
lSE. '
1där: Te = systemets totala kinetiska energi V = systemets totala potentiella energi
R = systemets dissipativa energi qi = generaliserad koordinat
. l . 2 l . Å . . 2
+ i Ilel + "2' ml (alel *2090 + Zo)
EQEeQEiellê_§QeägiQ
_ l 2 _ 2 l _ 2
V - -2- Kodo
(60
91)
+ --2-_' K1(ZO + 2090 + dlel
Zl) +
+ mOg (ZO + 60 ao) + mlg (ZO + 6020 + 61 al) PåêêlEêElYê-§Q§E§iE
_ 1 2 . _ . 2 1 . . . _ . 2
R - i CodO (60 el) + 5 Cl (ZO + 2060 + dlel Zl)
Sätts dessa uttryck in i Lagrange's ekvation och deri-* veras med avseende på den generaliserade koordinaten
60 fås vagnens rörelseekvation.
(I0 + m a 2 + m 2 2) Ö0 0 1 O 0 + m 2 al 0 l Ö l + m 2 äl 0 0 + m a i0 O 0 + + K d 2 (6O O 0 - e ) + K 1l 1 O (ZO + 2 9O 0 + d 9l l - Z )1
+ mOgaO + mngO + CodO (60 - 61) +
På motsvarande sätt fås vid derivering med avseende på
den generaliserade koordinaten el svängarmens
..
2
"
"
mlalSLOeO + (Il + mlal ) 91 + mlalZO
-- K d 2 (e -- e
0 0
0
1
+I«i (2 + 2 9 + d e - 2
1-1
0
0 0
1 1
1)
+
2 o o 0 c 0 0
+ mlgal ' Codo (90 ' 91) + Cldl (Zo + 2090 + dlel ' Z
= 0
De två k0pplade differentialekvatiOnerna kan på matris-form skrivas:
(3.1)
där A är en 2x2 matris och F och M är 2xl matriser. Här är matrisen A konstant och symmetrisk, matrisen
M konstant och matrisen E en funktion F = ?(ÖO, el, 90
I
61! t)o
De ingående elementen i matriserna får följande utseende (I
0
+m0 0 '
a 2 +ml 0
2 2)ml al
20
A:m
1 al
2
0
(I +
1
mlal
2)
d0 (Fov + Fof) +20(Flv + Flf)i =
"do (Fov * Fof) + d1(F1 + Flf
dar:
FOV = CO (doe0 - do el)
Fof = Ko (doeo ' d0 91)
Flv = C1 (Zo + 090 + dlel ' Zl)
Flf = Kl (Zo + 2060 + dlel " Zl)
Anledningen till att fjäder- och dämpkrafttermerna samlats i en matris är att som tidigare nämnts ekva-tionerna vid den numeriska behandlingen skall gälla även för exponentiell karakteristik hos fjäder och
dämpare. Därigenom måste de termer som representerar
fjäderns hoptryckning eller isärdragning resp dämparens hoptrycknings- eller isärdragningshastighet identifiee ras för att kunna förses med lämplig exponent.
M = mOa0 + ml 20
mlal
Nu kan ekvation (3.1) skrivas som:
A E = är t) (3-2)
Modifieringar av modellenj
För att få en bättre anpassning till verkligheten har
en del modifieringar gjorts i den tidigare härledda
modellen. Då fjädrar och framför allt dämpare i
prak-tiken mycket sällan uppvisar rent linjär karakteristik, är det önskvärt att kraften som funktion av läge resp
hastighet kan beskrivas på ett sätt som bättre
över-ensstämmer med verkligheten.
Ett sätt är att data från experimentella försök läses
,Ett annat sätt, som i de flesta fall ger en god an-passning, är att anpassa data från experimentella vär-den till en exponentialfunktion dvs
Ff = K'ön och F = c-äm
V där Ff är fjäderkraft FV är dämpkraft K är fjäderkonstant C är dämpkonstant 0 9 06 är förlängning hos är
förlängningshastig-fjädern het hos dämparen
Detta senare sätt har använts i det föreliggande simu-leringsprogrammet. (Några större ändringar i program-met skulle dock inte behöva göras för anpassning till
det första alternativet).
Uttrycken för fjäder- resp dämpkraft mellan ram och
hjul får då utseendet:
*12
1 I wn. -. : I_ . . . V
Of _ Koldoeo ' dogd Sign-(60' Gl) (fjaderkraft)
_ ° ° m . ° ' u .
FOV - Coldoeo - d061| -s1gn (60 - el) (dampkraft)
Emellertid än: ofta karaktäristiken hos verkliga däm-pare olika vid hoptryckning och isärdragning. Detta har införts i modellen genom att tecknet hos hastigheten styr vilken dämpkonstant och exponent som används vid beräkningen av dämpkraften vid den aktuella tiden. För däckets fjädrings- och dämpningsegenskaper har
an-tagits linjär karaktäristik då mer noggranna data har visat sig vara svåra att uppbringa.
I de ekvationer som härletts förutsätts att däcket kan
dock ej detta, utan hjulet lyfter från vägbanan och därmed kan ingen kraft verka på däcket från vägbanan.
Vid den numeriska behandlingen i datorn har detta kom-penserats genom att däckets fjäder- och dämpkonstant vid integreringen sätts lika med noll efter det att
däcket lämnat vägbanan. På detta sätt blir även nor-malkraften lika med noll. Så fort däcket åter träffar
vägbanan, återtar konstanterna sina ursprungliga vär-den. Kontrollen av huruvida däcket har lämnat vägbanan eller inte görs genom test på normalkraftens tecken. Ett litet fel kan uppkomma genom att integrering görs över ett helt tidssteg efter det att normalkraften sist var större än noll. Under denna tid kan normal-kraften ha blivit mindre än noll. Felet blir emeller-tid litet om emeller-tidssteget inte väljs alltför stort.
Förutom den viskösa dämpningen förekommer också i
verkligheten coulombsk dämpning p g a friktion i t ex svängarmslagringarna. Denna är till skillnad från den viskösa dämpningen hastighetsoberoende och har i prin-cip utseendet enligt figur 4.
FC M
Figur 4.
Eftersom friktionskraften gör ett kraftigt språng när hastigheten ändrar tecken är risken stor för att själv-svängningar uppkommer i systemet vid den numeriska
behandlingen. I programmet har därför dencoulombska dämpningen definierats enligt figur 5.
FC
. Del
Figur 5.
Denna kraft FC adderas alltså till de krafter som tidi-gare härletts.
Slutligen har vid beräkningen av dämpkraften av
kon-stant U införts, som väljs utgående från utväxlingen
mellan infjädringsrörelse och dämparrörelse.
Uttrycken för fjäder- och dämpkrafter får då slutligen följande utseende:
n
Fof - KO ldoe0 - dOGl - Sign (90 - 91)
o m 0 .
FOV = U CO ldOGO - dO Gl Sign (eo-el) + FC
där r COh = dämpkonst. vid hoptryckning, för
C ={ (90-91)<0
O
COu = dämpkonst. vid utdragning, för
lr mh = exponenten vid hoptryckn., för
(éo - él) < 0
mu = exponenten vid utdragn., för k (é 'f él) 2 O
0
U = ,utväxling-mellan infjädringse och dämpar- | rörelse
och
, . - _ - " ° _ ' l
CO Sign (90 91) for 90 91 > EF?
FC = 0 0 ' ' l
CO'CFF°(90 " for 90 " < ö???
där C0 är en konstant som anger kraftens storlek och CO - CFF är riktningskoefficienten för den del av kur-van i närheten av origo där coulombkraften antas vara hastighetsberoende (se figur 5).
CFF väljes utgående från vilket tidssteg som användes samt inom vilket område infjädringshastigheten väntas
variera.
Fjäder- och dämpkrafter mellan däck och vägbana ges av:
FlfzK
= . 2 . . _ . FlV Cl (ZO + 06 + dl 91 Zl)
där Cl och Kl sättes lika med 0 + 2 9 + d 9 - Z
Om (Zo
0 0
1 1
1)
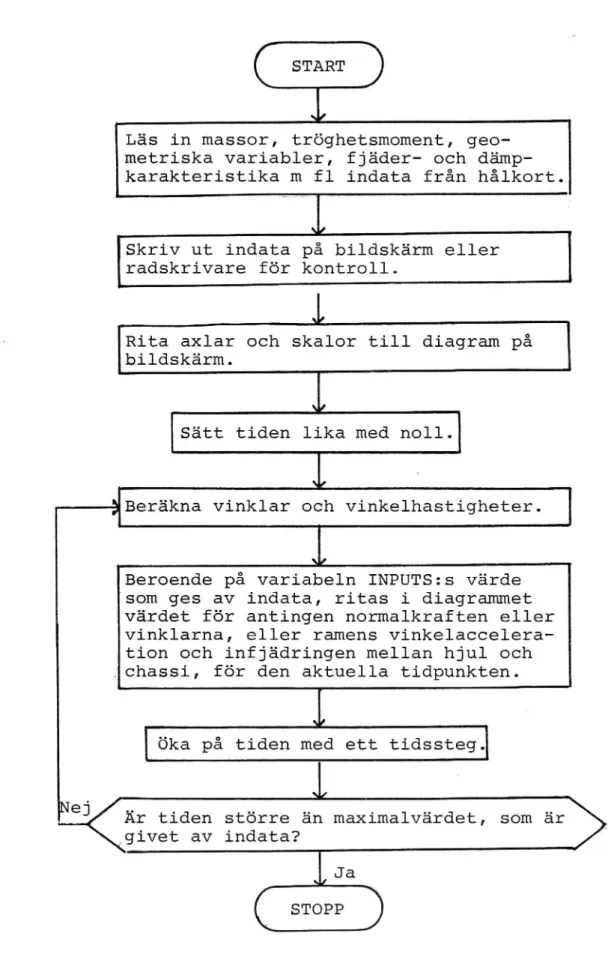
\<OMetod för numerisk lösning av systemet av differentialá ekvationer samt det använda dataprogrammet redovisas i bilaga 1. Här visas endast ett förenklat flödesschema för dataprogrammet (se figur 6).
16
C START D
i
Läs in massor, tröghetsmoment, geo-metriska variabler, fjäder- och
dämp-karakteristika m fl indata från hålkort.
*
n
i
[Skriv ut indata på bildskärm eller radskrivare för kontroll.
i
Rita axlar och skalor till diagram på
bildskärm.
Sätt tiden lika med noll. &'
---%{Beräkna vinklar och vinkelhastigheter.
Beroende på variabeln INPUTS:s värde
'som ges av indata, ritas i diagrammet värdet för antingen normalkraften eller
vinklarna, eller ramens
vinkelaccelera-tion och infjädringen mellan hjul och .chassi, för den aktuella tidpunkten.
i
Öka på tiden med ett tidssteg.
,hej Är tiden större än maximalvärdet, som är f
,givet av indata?
Ja < STOPP D
Figur 6. Förenklat flödesschema för det använda
f.
-J
FÄLTFÖRSÖK
?11311135 n t
De fältförsök som utförts har haft som syfte att ge en uppfattning om hur släpvagnar med olika fjädringsegen-skaper med respektive utan svängningsdämpare uppför sig vid passering av ojämnheter i vägbanan. Fältförsöken har även använts som ett instrument för att möjliggöra en uppskattning av datorkörningarnas validitet. För detta ändamål har datorkörningar gjorts med data som uppmätts för en av de vagnar som användes i fältförsöken. Jäm-förelser mellan erhållna resultat har därefter gjorts.
Proraingsmetod
vid fäitförsöken har två olika släpvagnar använts= I ena fallet användes en B & B ståltorsionsaxel avsedd för max totalvikt i 350 kg monterad på ett släpvagnsw
chassi nåd flak, i fortsättningen kallad vagn l. Denna
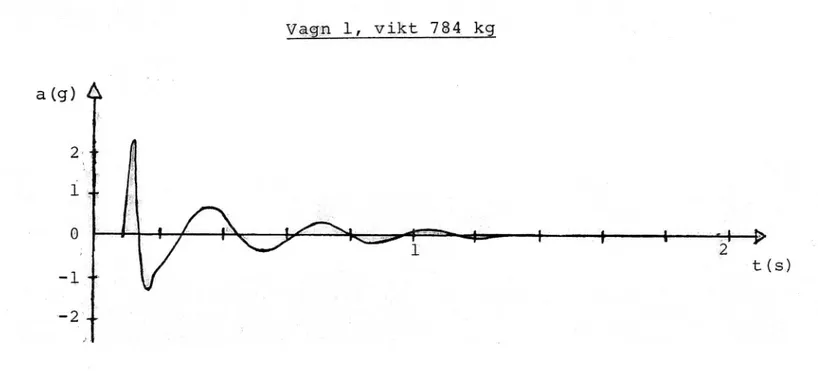
vag, sar en förhållandevis hård fjädringmed låg egen* dampningg Provning utfördes i detta fall vid två olika vagnsvikter, 784 kg och 1 304 kg, dels med och dels
utan svängningsdämpare. För erhållande av den lägre vikten monterades ett järnstativ med vikten 520 kg fast på chassit. För den högre vikten monterades ytterligare
ett sådant stativ ovanpå det första. Detta senare be"
lastningsfall kan anses relativt väl efterlikna
last-förhållandet för en större husvagn.
I andra fallet användes en Aloiszober gummitorsions-axel avsedd för max totalvikt 1 300 kg, monterad på ett släpvagnschassi. Denna vagn kallas i fortsättningen vagn 2. Jämfört med vagn 1 har denna vagn en mjukare fjädring._På grund av gummit har denna axel också en betydligt större egendämpningu Försök gjordes även med êenna vagn både med och utan svängningsdämpare, dock
endast för vikten 740 kg.
I avsaknad av erkända provningsmetoder och beskrivningar över hur en ojämnhet lämpligen bör vara utformad för att belysa fordons fjädrings" och dämpningsegenskaper val-des ett enstaka hinder i form av en planka som spikaval-des fast i vägbanan vinkelrätt mot färdriktningen. Plankans
mått framgår av figur 7.
F v 180 mm 55 mm
:r\\\\'\\"\\\\\\å
Förlelen med att använda ett enstaka hinder jämfört med periodiskt återkommande störningar är att vagnens ijdd" rinqssjstem automatiskt kommer att svänga med sin egen" frekvens efter det att hindret har passerats, oavsett haStigheten.
Vid provningarna utrustades vagnarna med en linjär läges-givare mellan ena hjulet och chassit. På detta sätt
kunde hjulets fjädringsrörelser registreras. I stativet mitt för hjulaxeln monterades en accelerometer som
registrerade accelerationen i vertikalled hos släpvag* nen. Accelerometern och lägesgivaren kopplades till en
ljusstråleskrivare i dragbilen (Saab 99). På
skrivar-remsan registrerades också hastigheten från en givare
på bilens ena bakhjul.
Försöken omfattade körning Över ojämnheten med 30, 40
.7
och 50 km/h. Eftersom fjädringen i gummitorsionselemenw ten antagligen är beroende av temperaturen, bör tilläggas
.1 H M u n o
olika hastigheter föreligger, kommer här endast försöken vid 40 km/h att behandlas. Det visade sig i efterhand vid avläsning av skrivarremsan att den verkliga hastig-heten vid dessa försök varit 36 - 38 km/h.
I figurerna 8 - 10 visas resultaten av försöken met de båda vagnarna vid denna hastighet. Försöken med och utan svängningsdämpare har här presenterats i samma
figur för att underlätta jämförelser mellan de båda
fallen. Den övre kurvan visar den vertikala acceleratio» nen a för chassit, medan den undre visar infjädringen 5
mellan hjul och chassi, båda som funktion av tiden.
Resultaten från försöken med svängningsdampare påmonte" rade har i figuren återgivits med heldragna linjer, medan s reckade linjer hänför sig till försöken utan
dampare-Figur 8 visar resultaten av försöket med vagn 1 och
vagnsvikten 784 kg. Man kan här se en betydande skill-nad i antalet svängningar efter det att hindret passe» rats. För fallet med dämpare har nästan hela svängnings-rörelsen dämpats ut efter 1 sekund, medan vagnen uran dämpare fortfarande svänger efter 2 sekunder. Vid jämn förelse ellan accelerationskurvorna märks att actele-rationen för chassit är något högre just när hindret passeras om dämparna är påmonterade. Detta beror på att dämparna "styvar upp" fjädringen, vilket också märks om man jämför infjädringen vid samma tidpunkt. På detta sätt överförs en större kraft från hjulet till chassit vid passagen av hindret.
I början på acc lerationskurvan kan man se en frekvens e
e
är chassits egenfrekvens medan den högre (ca 13 Hz)
är hjulets egenfrekvens. Orsaken till att acceleratio-nen för chassit, vid dess rörelse ned mot vägbanan, kan överstiga tyngdaccelerationen, dvs 1 g, beror på reak-tionen från hjulets svängningsrörelse. Hela släpvagnen
befinner sig då i luften.
Figur 9 vis r resultaten av försöket med vagn 1 och vagnsvikten 1 304 kg. Man ser att för detta fall upphör svängningen betydligt snabbare både med och utan däm-pare. Detta beror på att förhållandet fjädrad massa/3
ofjädrad massa nu är större. Den fjädrade massan sätts
\
"nte lika lätt i svängning för vagnen med den större
För försöken med vagn 2 och vikten 740 kg, som visas i figur 10, märks nästan ingen skillnad mellan de båda fallen. Detta beror på att gummitorsionSLLementet i sig självt har så hög egendämpning. Det bör otserveras att skalan är en annan för infjädringsrörelsen i detta
fall hernnnde på att utväxlingen mellan hjulets rörelse
.5
Och lagesgivarens utslag vid försöken var 0,7. Man kan se att chassit fortsätter att svänga sedan infjädringsw rörelsen har upphört. Detta har antagligen sin föräla» ring i att däcket fortsätter att fjädra ef'ter (et att Ejädringen i gummitorsionselementet dämpats ut
_Muqu-mod dämpare !. . r; 2 : ,A m »»- utan -"-å W 1% pp
l'
5,,
g | I.?W
ÅHk
\ ,J ('V^
, V1^
a
, b 9! ;13: \ [ik \ ;om 5 I ' *ä p 5» J \(3 ,___.uL.Uv-hng:..Å1 _.'1 ; i. 1 J46* . :Lao: .Å ittwr\_4. V EI Öhhl: \ - r, {,\ JI K , "Wx /1 f \\\l få;_
im
i. 12' l« r
\i' I
\ J\ 1
\ I \,x
* I
2
t- [e]
,,. u 131 7 J '-1 .1=- 0 5 l 2E *i
6 ?nunj Ä' s.
25 .. ;IF\\ ;IK I' "\ i \ (31:3 \. 9 "C, \ i, \ l-\ - i.- \ 4 .0 § .r i: » G ...fu ;G A* 9;_ x- lr. T\./ _____1\ :i :År: xww_ "_2325, a.. ' § I g" "25 3 ' 'tLSJ *r 0 l 2Figur å. Fältförsök, vagn 1, Vikt 784 kg: Chassits
vertikalacceleration a och infjádringsrörelsen 6 som funktion av tiden vid körning över
enkelhinder å{cqå __n_ meâ dämpare L. .4 5 g --u-- utan -"-; [ä , 0 ]\l
Ii 7*
' \
. å. . x _ ' Nu., 1 " \ - r s. A_ I _.. ;33.G w'wñlhñiwglwwr: 5; I i 9 X Y" '-7 V \_ of* 5
-;W
gg??
. 4? et :53.5
_lo» oia 1 2 åpmn] \2 5
0 'Ejå/r,..
'y ,v aa g. 4,. Q 'Räzüáv F t$V ' 2. 13 _25 05? 1 2 t s]figuç 9. Fältförsök, vagn l, vikt 1 304 kg. Chassits
vertikalacceleration a och infjädringsrörelsen ö som funktion av tiden vid körning över
.3
2.
{ /, . \ Maxi .\ .
r; i: v _____.__ ,Il \\\ ;få \\.. lçh%äethh _ :F4.Rtxv_gxr___yv_å©
LT *§3 ,If1-4 \ ,1\ h/II- '* ,l Ex! W »me4_ '
0 ;law
x
1
2.
48]
.. 3 . j b "Ami , ü 0' JE; ?få *? ,a av 'A\ L N \ i i :i: *'37 , A_ N., / "?*1 mm: *3) \ ,5 \ -_ i t s -25 Ouå l 2 LElgggulg. Fältförsök, vagn 2, vikt 740 kg. Chassits
vertikalacceleration a och infjädringsrörelsen ö som funktion av tiden vid körning över
enkelhinder
-[-u
Jämförelse mellan datorkörningar och fältiörsök
Ett av syftena med fältförsöken var som tidigare nämnts att avgöra dataprogrammets giltighet. De storheter sam uptmättes vid fältförsöken var hjulets infj dringsrö-ä relse och chassits vertikalacceleration. Datorkörningar har.därför gjorts med data som uppmätts för en av de vid fältförsöken använda släpvagnarna. Eftersom det är svårt att mäta dämpningen i gummitorsionsaxeln har jämw förelse mellan fältförsöken och datorkörningar gjcrts
med data från vagn 1 med ståltorsionsaxel.
För att kunna jämföra de vid fältförsöken uppmätta accelerationerna och infjädringarna har de vid simulew ringen beräknade vinkelaccelerationerna och vinkelskill-naderna omräknats med hänsyn till givarnas placering. I tabell 1 anger X avståndet från'dragkulan till acceu lerationsgivaren och Y avståndet från svängarmens in" fästning till lägesgivaren.
23
Storhet Sort Vagn 1
IO kgm2 273 Il kgm2 0,52 m0 kg 707 ml kg 77 aO m 2,01 al m 0,133 do m 0,152 dl m 0,152 10 m 2,075 R N 677 N N 7014 X m 2,075 Y m 0,152 Tabell 1 Figur 11.
Den största svårigheten vid simuleringsarbetet var att efterlikna däckets egenskaper vid passage av ojämnheter i vägbanan. Fjäderkonstanten för däck anges oftast
utgående från försök på plant underlag. Vid passage av
mindre ojämnheter kommer emellertid dessa delvis att
bäddas in av däcket. Däcket är i sådana fall mjukare
än den normala fjäderkonstanten anger. Det var önskvärt att störningen skulle vara så pass snabb att alla i fjädringssystemet ingående kroppar skulle komma i egen-svängning, och att storleken på störningen skulle indu-cera en mätbar svängningsamplitud. För att åstadkomma denna störning kördes släpvagnen över en planka med höjden 55 mm. Om man skulle programmera in en sådan profil ograverat skulle simuleringen dåligt likna
verk-ligheten, eftersom plankan bäddas in i däcket då däcket kliver upp på plankan. Ett sådant steg kan även medföra
numerisk instabilitet vid simuleringen.
I en rapport av I Page (6), anges ett sätt att övervinna denna svårighet. Man antar att körning över en planka vid simuleringen kan efterliknas, om klivet upp
på-plankan slätas ut till en halv sinusvåg enligt figur
12. Detta antagande har utnyttjats i
Wheel position .A
:-tyre just touching
edge of step
Actual road profile
Wheel position B
:-wheel part way up step, tyre'enveloping' step
Wheel position C :-tyre contact area just completely on top of step
The step profile is smoothed os follows
:-Half sine wave is fitted
between points A ond C
'-3.
|
A | '
C Smoothed road profile
HOW A STEP SURFACE lRREGULARITY IS SMUDTHED Figur 12.
Uppmätning av vagnens fjäder och dämpkaraktäristik hade
tidigare gjorts på VTI. Fjäderkaraktäristiken hade
uppmätts genom att infjädringen uppmättes för tomvikten,
0,6 x totalvikten, totalvikten samt 1,5 X totalvikten.
För dämparna mättes dämpkraften som funktion av hastig-heten både vid hoptryckning och isärdragning. En expo-nentialfunktion har därefter anpassats till dessa värden med en logaritmisk regressionsmetod. Infjädringen för däcken uppmättes praktiskt och antogs variera linjärt
med kraften. Resultaten jämfördes även med i ( 5 )
uppmätta fjäderkonstanter. Från samma rapport har ett värde på det aktuella däckets dämpkonstant tagits.
Det verkar också friktionskrafter, s k coulombsk
dämp-ning, i hjulupphängningen, t ex i svängarmslagringar hos torsionsfjädringar. Då storleken på denna kraft
inte alltid är försumbar måste hänsyn härtill tas.
Vid en jämförelse mellan fältförsök och simulering, då svängningsdämparna var bortplockade upptäcktes en stor avvikelse mellan resultaten. Därför infördes i dator-beräkningen en coulombkraft som gav samma
svängnings-bild som vid fältförsöken.
För bestämningen av tröghetsmomenten för ramen och sväng-armen gjordes praktiska försök. Vid bestämningen av
ramens tröghetsmoment hängdes densamma upp lodrätt, ledad i draganordningen, se figur l3.
Ur rörelseekvationen för en fysisk pendel fås då trög-hetsmomentet som funktion av svängningstiden enligt
I = szag
A 4II2
där IA = tröghetsmomentet kring punkten A T = svängningstiden
= massan
aO = avståndet mellan tyngdpunkten och infästningen g = tyngdaccelerationen
Detta Värde gäller ej exakt, då ingen hänsyn till frik-tion i lagringen har tagits. För den uppmätta
sväng-ningstiden T = 3,0 5 fås då IO = 791 kgmz. Då
tröghets-momentet i dataprogrammet ska gälla kring tyngdpunkten omräknas detta enligt Steiner's sats,
I0 = IA - maå = 122 kgm2
För svängarmen uppskattades tröghetsmomentet på lik-nande sätt, varvid svängarmen bringades i svängning kring svängarmslagringen. Svängningstiden T = 0,86 5
ger då tröghetsmomentet kring tyngdpunkten Il = 0,26
kgmz. Eftersom simuleringen gäller en enspårsmodell
slås de bägge svängarmarna för släpvagnen i simuleringen samman till en, med tröghetemomentet Il = 0,52 kgmz. En enkel teoretisk beräkning av tröghetsmomentet där massan koncentrerats till tyngdpunkten ger resultatet
Il = 0,48 kgm2.
Massan och tyngdpunktens läge för ramen fås genom be-stämning av axelbelastning och kulbelastning samt väg-ning av hjul med svängarmar. Tyngdpunktens läge för svängarmen vägdes ut. Värdet för alla uppmätta stor-heter finns representerade i tabell 1.
Jämförelsen omfattade, som tidigare nämnts, vagn 1 både med och utan svängningsdämpare. Resultaten från
fält-försöken och datorkörningarna finns representerade i figurerna 14 - 21.
De vid fältförsöken uppmätta accelerationskurvorna, figur 15 och 19 har ett taggigare utseende än
motsva-rande kurvor för datorkörningen, figur 14 och 18.
Speciellt kan man se det om man jämför kurvorna för fallet med svängningsdämpare, figur 14 och 15. Dessa registrerade skillnader beror av flera olika faktorer. För det första att vägbanan omkring hindret vid fält-försöken ej är helt jämn, vidare att släpvagnens chassi ej är en idealt stel kropp. Dessutom är inte infäst-ningen i dragbilen helt ofjädrande. I början av accele-rationskurvan för fältförsöket med svängningsdämpare, figur 15, ser man en överlagrad svängning med större amplitud än de ovan nämnda skillnaderna. Det är antag-ligen hjulets svängningsrörelse som har registrerats. Inte heller denna svängning syns i datorkörningen.
Detta kan bero på mekaniskt glapp i svängningsdämparna, vilket ju inte finns vid datorkörningen. Accelerations-kurvorna utan svängningsdämpare, figur 18 och 19,
upp-visar i stort sett samma skillnader.
Infjädringskurvorna för fallet med svängningsdämpare figur 16 och 17, uppvisar till skillnad mot accelera-tionskurvorna för samma fall, figur 14 och 15, inga
större skillnader. Detta kan bero på den ovan nämnda felkällan, att chassit i sig självt inte är stelt, och att mindre störningar inte ger upphov till någon
infjädringsrörelse p g a att den initialkraft som krävs för att övervinna friktionskraften inte uppnås.
Jämför man infjädringskurvorna utan svängningsdämpare,
figur 20 och 21, ser man att den i början av kurvan
ut snabbare för fältförsökskurvan. Detsamma gäller också motsvarande accelerationskurvor, figur 18 och 19 även om det här är svårare att upptäcka skillnaden p g a de ovan behandlade felkällorna. Vid datorkörningen
ut-provades, som tidigare nämnts, den coulombfriktion som
gav samma svängningsbild utan svängningsdämpare. Sväng-ningsbilden blev lika såtillvida att dämpningen av
grundfrekvensen, dvs chassits rörelse, överensstämde.
Hjulets svängningsrörelse dämpades dock ut långsammare vid datorkörningen. Att inte överensstämmelse erhölls kan möjligen bero på att däckets dämpning i verklig-heten är högre än vad som antagits i dataprogrammet. Andra felkällor är kalibrerings- och instrumentfel hos mätutrustningen, osäkerhet i uppmätta data för släpvag-nen och svårigheter att anpassa dataprogrammet till verkligheten.
I stort kan man säga att datasimuleringen ger en bra
bild av verkligheten, då amplituder och frekvenser i
det närmaste överensstämmer med dem i fältförsöken upp-mätta. Man kan därför anta att normalkrafter beräknade med dataprogrammet också väl liknar de i praktiken
vagn 1, Vikt 784 kg
4
x
Figur 14. Accelerationen a hos chassit som funktion av tiden vid datorkörningen med svängningsdämpare
Figur 15. Accelerationen a hos chassit som funktion av
Vagn 1, Vikt 784 kg 6(mmjê 40' 20 .--2.0h_ -» t (s) -40 1 '
Figur 16. Infjädringen 6 som funktion av tiden vid datorkörningen med svängningsdämpare
Figur 17. Fjädringen 6 kring det statiska jämvikts-läget som funktion av tiden vid fältförsöket med svängningsdämpare
Vagn 1, Vikt 734 kg
Figur 18_ Accelerationen a hos chassit som funktion av tiden vid datorkörningen utan svängningsdämpare
t(s)
Eigur 19. Accelerationen a hos chassit som funktion av tiden vid fältförsöket utan svängningsdämpare
Väg?
7.84_ .kg \
L _L l L 1 L_ | I I
1 *iir T 1 1 r F f 7
l 2 -t(s)
Figur ;NL Infjädringen 6 som funktion av tiden vid datorkörningen utan svängningsdämpare
ö(mm)A
Figur 21. Fjädringen ö kring det statiska jämvikts-läget som funktion av tiden vid fältförsöket utan svängningsdämpare
DISKUSSION
Fjädringens och dämpningens inverkan på väghållningen För att kunna utvärdera de resultat som erhållits ur fältförsök och datorkörningar behövs någon form av
kriterium för väghållningen. I referens 3 finns upp-taget ett kriterium som har att göra med hjulbelast"
ningens variation kring det statiska värdet. Även
symmetrisk variation kring det statiska värdet ger på grund av det tidigare visade icke-linjära sambandet mellan hjulbelastning och sidkraftsupptagningsförmåga upphov till en avsevärd försämring av den senare. Det väghållningsmått som definierats ges med hänvisning
till figur 22 av E-l-E +E +134
p'
3"1
få02
3
. 100 _<%
3
F' (N) Pstat* \\::S:\<\Ö\\CV\\\Q ' \\ E0 '0: Pstot' f1 \\51\\ NO wheel load variation \\\\\\\
Å
\:\\\\\ N55
0 _ _.-m- t I t (sec) Pm) _p
:mt ' 'iffäyx /'\ /\ fl
;tng ?g *f L172* g 37M2' 152 a//1 ' 3.// §74d'.
>
\L/z
Ga * 0 9(SCC) :MWAverage dynamic wheeå load decrrxnanf (Fd) E *9- 5 + E + E
-a l 2 3 4-1m(%>
-E0
. '1 ?\
EigurwiäL Förklaring till teorin bakom minskning av dynamiska hjulbelastningens medelvärde
J
d
kelserna är kring det statiska värdet, samt ju fortare Som framgår av figur 22 blir P mindre ju mindre
avvi-svängningarna dämpas ut. Lågt värde på På innebär
så-ledes god väghållning. Med hjälp av datorprogrammet kan
den i figuren streckade ytan och därmed också väghåll-ningsmåttet Pâ tämligen lätt beräknas. Sådana
beräk-ningar har utförts för olika kombinationer av fjäder och dämpkonstanter. Övriga indata till programmet har varit de data som uppmätts för den vid fältförsöken
använda vagnen 1 med massan m0=707 kg.Integreringen,dvs
beräkningen av den streckade ytan, har utförts under 2 sekunder efter det att körningen startats. Eftersom hindret uppträder efter O,l sekund görs beräkningen
så-ledes under 1,9 sekunder efter det att hindret
passe-rats. Att denna tid valts, beror på att datorkörningarna tar förhållandevis lång tid. För de flesta kombinatio-ner av fjäder- och dämpkonstanter hade dock huvuddelen av svängningen upphört efter denna tid.
Utgående från resultaten från dessa körningar, hard
J
d
funktion av dämpkonstanten med fjäderkonstanten som kurvorna i figur 23 uppritats. Figuren visar P som parameter. Körningarna har gjorts för linjär fjäder och dämparkarakteristik. Som exempel kan nämnas att den vid fältförsöken använda vagnen 1, om uppmätta fjädrings- och dämpningskarakteristika anpassas till linjära funktioner, skulle kunna representeras av
punkten P i figuren. Man ser att väghållningen med
användande av detta kriterium skulle kunna förbättras genom framför allt en mjukare fjädring, men också
genom något ökad dämpning.
I referens (9) har använts ett värde D2 "aufbaudämp-fungsmass" som är ett mått på dämpningen för chassit. Man tittar i detta fall på ett enmassesystem enligt
figur 24 vars rörelseekvation ges av: mä + ck + cx = 0
/\ FT* *4I!) I 1. :r: \ tm_U 0 o m M v 0. O 0
/
1 \
' N ' I .E ! 'F u_g
: va
I \ \*| I .\ ir.
,.
\.\.
\\\
1
'I \ CD 5; 3 \ x __ g .2. 1 r N o o o o o i "4 o O 0 o o \ o o , o o o o o o o _ c: .. m m m m m o u n u n Ef , o i»J ..54 .2 .5: Du '54 v7 v7' \;l IC). ' / / .z / O // .o ""0 _a_ wwñmøøøw 'ut 4:-?- ; ° :ri-1""M'WF'OW .L % 3 in C) m 0 I!) 0 m 0 f"' ':00 m m N N H H 6...I \ J .1 0 n a.) :0 1 g 1 , a _0 C 4' _ i 0 .oEigül 2J_ Vagnullnlngsmdttet Pd som funktion av damp-konstanten c med fjäderdamp-konstanten k som
para-meter.
mas 561 m
F U
0
?en gäller för vagn 1 med ofjädrad 7 kg.
Figur 24.
där m är den fjädrade massan, och k och c är
fjäder-respektive dämpkonstanten mellan chassi och hjul.
Vär-det på D2 ges i detta fall av
D2 > 1 innebär överkritisk dämpning och 0 < D2 < 1
innebär underkritisk dämpning. I den här använda
model-len där även rotation förekommer (se figur 25) får detta Dz-Värde formen:
[2%
]
Pd
Eggur 26. 35 nu I I b _ 4 I_ D i g '-D E \ -Z -0 II O O O C .54 n O O O O O O O O O m ...4 O O O 0 m m m LO ll c:) 9 '3' N II I! ll ll F. .-54 A: .54 .54 D .-1- L 1 l 1 L I I i I 1 O ln 0 m 0 LD C' m N N F* F! fVäghållningsmåttet Pd som funktion av
dämpnings-måttet D2
Figuren gäller för vagn 1 med ofjädrad massa m0=707 kg.
Figur 26 visar Pâ som funktion av dämpningsmåttet D2 fortfarande med fjäderkonstanten som parameter. Figu-rerna visar att dämpningen noll för samtliga
fjäder-konstanter innebär ett högt värde på P' . Det lägsta
värdet erhölls med fjäderkonstanten k = 50 000 N/m och D2 = 0,48 (motsvarar C = 5 400 Ns/m). En sådan låg fjäderkonstant ger emellertid upphov till stora fjäder-vägar. Man ser att en ytterligare Ökning av dämpkonstan-ten i detta fall medför en ökning av värdet Pâ. Detta har sin förklaring i att hårdare dämpning medför att en större del av hjulets rörelse överförs till chassit så att detta kommer i svängning samt att en större del av fjädringen sker i däcket.
I figur 26 där Pâ
minimum för de olika kurvorna på ungefär samma D2-är avsatt som funktion av D2 ligger värde. För höga värden på fjäderkonstanten kommer
största delen av fjädringen att ske i däcket varför detta inte längre gäller. Eftersom detta Dz-värde inte tar hänsyn till den ofjädrade massan och inte heller fjädrings- och dämpningsegenskaperna hos däcket, skulle en uppmätning och uträkning av detta Dz-värde inte
ge tillräckligt underlag för bedömning av fjädrings-systemets egenskaper. En stor del av variationerna hos hjulbelastningen har också att göra med den ofjädrade
massans rörelser.
Möjliga mätmetoder
I målsättningen för detta examensarbete ingick även att om möjligt utveckla en enkel mätmetod för bedömning av
fjädrings- och dämpningsegenskaper. Den begränsade tiden för arbetet medgav dock bara en inventering av vilka tänkbara mätmetoder som finns. Praktiska försök med dessa metoder måste utföras innan det är möjligt att ge någon rekommendation om lämpligt provningsförfarande.
Inom ramen för detta arbete utfördes dock några försök' då släpvagnen hissades upp ett stycke ovanför
under-laget och därefter släpptes. Infjädringsrörelserna re-gistrerades med hjälp av en ljusstråleskrivare som kopplades till en lägesgivare monterad mellan hjul och chassi på samma sätt som beskrivits i kapitel 4. Figur 27 Visar resultaten från dessa försök. Försöksvagnen var i detta fall den tidigare beskrivna vagnen med B & B
ståltorsionsaxel (vagn l). Försöken utfördes med och
utan svängningsdämpare. Man kan se en markant skillnad mellan de båda fallen. Liknande försök gjordes även med vagnen med gummitorsionsaxel (vagn 2), även här både med och utan svängningsdämpare. I detta fall kunde ingen märkbar skillnad utläsas. Orsakerna härtill har
behand-lats i kapitel 4. En sådan försöksmetod kan ge viss in-formation om ett fordons fjädrings- och dämpningsegen-skaper genom att man mäter infjädringsrörelsens storlek samt hur snabbt den dämpas ut. Nackdelen med denna metod är att dämparna arbetar vid en betydligt lägre hastig-het (chassits egenfrekvens) än vad som är fallet vid snabba rörelser hos hjulet. Hjulets egenfrekvens är oftast i storleksordningen 5 ggr så hög som chassits. Det är dock tänkbart att metoden efter lite utveckling skulle kunna användas till att enkelt kontrollera att
släpvagnar uppfyller vissa grundkrav på fjädringsväg
och svängningsdämpning.
För personbilar har ett flertal metoder utvecklats för kontroll av stötdämpares funktion, när dämparna är monterade på bilen. Det är troligt att dessa metoder även skulle kunna användas för släpvagnar, men tyvärr kräver de oftast relativt komplicerad apparatur.
(mm ;3 60" 4047X 2G..
/\ /\
/4/\ S V t(s) I 20*/\/\U/\
0\-
.H
V V
,
Figur 27 Släppförsök med vagnen med B &'E ståltorsionsu
axel. Den Övre kurvan Visar försök med origiw
naldämpare monterade, medan den undre Visar
I referens (9) finns beskrivet en metod där hjulet körs upp på en platta som via en fjäder är förbunden med en vevstake. Vevstaken sitter på en vevaxel som drivs av en motor. Plattan bringas att svänga med en frekvens som ligger över chassits och hjulets egenfrekvens.
Frekvensen minskas sedan successivt ner till noll, medan
amplituden för hjulets rörelser registreras. I detta
fall genomlöps alltså både den fjädrade Och den
ofjäd-rade massans egenfrekvenser. Här gås inte närmare in på försöksmetoden utan hänvisas i stället till ovanstå-ende referens. Provningsmetoden har nackdelen att resul-tatet måste relateras till ett tidigare bestämt gräns-värde vilket inte får överstigas. Man kan således inte med utgångspunkt från endast dessa försök avgöra om fordonet är kördugligt eller ej.
En metod som liknar den tidigare metoden, men där vev-staken är direkt förbunden med plattan som hjulet vilar på, finns beskriven i referens (7). Härvid mäter man kontaktkraften mellan hjul och platta under det att
plattan försätts i svängning från ca 25 Hz till 0.
Resultatet från provningen anges här på formen: Minsta dynamiska hjulbelastning
Statisk hjulbelastning x 100%
Detta är ett mer absolut mått där man inte behöver olika bedömningsunderlag för olika fjädringssystem och
fordon.
Slutsatser
Beträffande fältförsöken är det svårt att utgående från
dessa säga vad som från trafiksäkerhetssynpunkt är
acceptabelt i fråga om fjädrings- och dämpningsegenska-per. För att få ett bättre underlag för en sådan
borde flera olika typer av släpvagnar med olika fjäd-ringssystem provas. Även en utökning vad gäller prov-ningsmetoder skulle ge ytterligare information. Tänk-bara metoder är körning i kurva över upprepade hinder, varvid girvinkeln för släpvagnen uppmäts samt bromsning över ojämnheter med uppmätande av bromssträckan.
För bedömning av stabilitetsegenskaper vore slalomkör-ning en tänkbar metod. En stor komplikation är dock
att det är hela fordonskombinationens egenskaper som
provas och inte enbart släpvagnens.
Det allmänna intrycket av provningarna är att de båda provade vagnarna har en alltför hård fjädring. Dator-körningarna (se figur 23) med data enligt vagn l pekar
också på samma sak. En jämförelse mellan fjädringsvägar
hos släpvagnar och bilar visar att släpvagnars genom-snittliga fjädringsväg är ungefär en tredjedel av nor-mala fjädringsvägar för bilar.
Fördelen med små fjädringsvägar (= hård fjädring) på
släpvagnar är att kraven på hjulupphängningens
utform-ning inte behöver vara så hårda. Den vanligaste formen av hjulupphängning på släpvagnar utgörs av längsgående,
bakåtriktade bärarmar. Denna ger Vid krängningsrörelser upphov till styreffekter p 9 a camberändring hos hjulen,
vilket är ogynnsamt från stabilitetssynpunkt. Det går
dock att förena mjuk fjädring med krängstyvhet genom att utrusta vagnarna med krängningshämmare. De ovan nämnda styreffekterna kan också elimineras med en annan utform-ning av hjulupphängutform-ningen.
Den hårda fjädringen ger upphov till att stora delar av hjulets rörelse överförs till vagnens chassi, speci-ellt vid lägre vagnsvikter, dvs då lasten är liten. För vagn 1 är fjäderkonstanten mellan hjul och chassi unge-n fär hälften av fjäderkonstanten för däcket. Detta bety-der att ungefär hälften av fjädringsrörelsen sker i
däcket. För att inte svängningsdämpare skall medföra att en hård fjädring blir ännu hårdare, är det viktigt
att kravet på dämpning också kopplas till krav på minsta
acceptabla fjädringsväg, så att kombinationen fjädring-dämpning blir godtagbar. Genom att använda oliksidiga dämpare, dvs sådana som har låg dämpkraft vid infjäd-ring och hög dämpkraft vid utfjädinfjäd-ring kan man förena mjuk fjädring med hög dämpning.
REFERENSER
(l)
(2)
(3)
(4)
(5)
(6).
(7)
(8)
(9)
Nordmark, s. Klassisk mekanik med tillämpningar
inom fordonsdynamiken. Meddelande nr 3, sta-tens väg- och trafikinstitut, 1976.
G. Programmering i standard 1976. T, Eriksson, Studentlitteratur, Ekman, FORTRAN,
B P. Influence of road uneveness on road sta-Sinha,
holding and ride comfort. Rapport nr 28, tens väg- och trafikinstitut, 1973.
Kullberg, G, Nordström, O, Magnusson, G, Formgren,
C. Lätta fordonskombinationers kördynamik och
bromsförmåga. Meddelande 93, statens väg- och
trafikinstitut, 1967.
Hahn, W-D. Die Federungs- und Dämplungseigenschaf-ten von Luftreifen bei vertikaler Wechsellast, der Fakultät für Maschinenwesen der Technischen
Universität Hannover, 1972.
Page, J. Dynamic behaviour of a single axle vehicle suspension system: a theoretical study.
Transport and Road Research Laboratory. TRRL Report LR 580, 1973.
Avner, I E D, Keijzer, J H, van Norden, G A G. Suspension Performance Testing, Automotive
Engineer, Volym 1, Aug/Sept 1976.
Malcolm, G-D. How safe are caravans in our transport
system. SAE-Australasia, Paper 12, May 1977. TÖV, Rheinland, Schwingungsdämpfung und
NUMERISK LÖSNING AV SYSTEMET AV DIFFERENTIALEKVATIONER För lösning av begynnelsevärdesproblem av typen:
i = f (i, t),
där f är en vektorvärd funktion av vektorn § och tiden t finns ett flertal numeriska metoder.
Då differentialekvationssystemet i det aktuella fallet är av andra ordningen kan dessa metoder ej direkt
appli-ceras på problemet. Inför därför substitutionen Q i ll \ Mh § S2 l-Il ml
Ekvationen.( 3.2) kan då skrivas
S2 I II !H1
A
(3.3) Q IMultiplicera den första ekvationen med A-l från vänster: -1
Il QI
Observera att för A i detta fall alltid inversen
existe-rar.
Ekvationssystemet ( 3.3) kan skrivas som:
= 5(5, 5, t)
( 3.4 )
Q I ' Q lSätt
f =
.
,
§ =
Ekvationen.( 3.4) kan nu skrivas som:
Y = ö (i, t)
(3.5)
Ekvationen.( 3.5) är'nu för givna begynnelsevärden möjlig att lösas numeriskt.
Med kännedom om värdena vid tidpunkten nAt kan värdena Avid tidpunkten (n + l)At beräknas. I detta fall
använ-des en Runge-Kutta metod Som för ett problem på formen
(3.5) innebär: ?V i H OI lKi :3 ('1 -l n
E2 = ê(§n + å; El, (n + %)At
E3 = ê(§n + %; E2, (n + %)At
E4 = ê(§n + At E3, (n + l)At)
och §
n+l= i + AE (E + 2% + zi + E
n 6 l 2 3 4för felet gäller en utveckling på formen
FLÖDE SSCHEI'ÃAW FÖR DATAP ROGRAMMET
CSTART j
Skriv ut indata
Styrvariabel för att plotta var femte
värde-I
par.
BGV(1)=O Begynnelsevinkelhastig--- heterna sätts lika med BGV(2)=O noll.
__L_
Beräkna
[___[Begynnelsevinklarna
BGV(3) och beräknas. BGV(4) DG(I)=BGV(I) I=l,..., 4Beräkna 4"__[Ben statiska normal-ARM l kraften beraknas.
Anropa PLO4KV Anropa PLO4KV
Ö
Anropa PLO4KV '- HOPPlottar axlar och skalor på bildskärm för DG(3)=f(TIME) DG(4)=f(TIME) \ , Dito för
f'-_-{ARMl = f (TIME)
Dito för = f(TIME) ACC = f(TIME)W
SKl=XKl Cl=ClINF
Anr0pa VAEGP Ja Beräkna ny DG-Vektor med Runge-Kutta metod Anr0pa RUNGE fyra gånger.W
.-Beräkning av
höger-ledet sker i sub-routine RUNGE
Bilaga 2 Sid 4
. N9=N9+l
Plottar Värdet för
N9=O
ARMl=f (TIME)
'på bildskärm J I 1 Plottar värdet för HOP=f(TIME) Anropa ACC=f (TIME)
[på bildskärm
PLO4KV
I I J Anrcpa PLO4KV ' Plottar värdet Anropa för DG(3)=f(TIME) '--"'"" DG(4)=f(TIME)PLO4KV
på bildskärm
TIME = TIME + TSTEPI
Nej Ja
BESKRIVNING AV SUBROUTINER GIVNA I DATAPROGRAMMET Subroutine 1. Sthe Utför matrismultiplikationen 26 = MATMP(X, M, N, Y, L, Z6) XY,
en MxL-matris i vilken resultatet av matris!
RUNGE(TIME, DG, YP)
Beräknar differentialekvationssystemets högerled YP.
en vektor med fyra komponenter, där ramens vinkelhastighet
svängarmens vinkelhastighet ramens vinkel
svängarmens vinkel
en vektor med fyra komponenter, där
ramens vinkelacceleration svängarmens vinkelacceleration ramens vinkelhastighet 2. Argumentlista X en MxN-matris M antal rader 1 X N antal kolumner 1 X Y en NxL-matris L antalet kolumner i Y_ Z6 multiplikationen läggs. Subroutine l. SXfte 2. Argumentlista T IME tiden DG DG(ll = DG(2) = DG(3) = DG(4) = YP YP(l) = YP(2) = YP(3) =
3. Variabler införda i subroutinen via COMMON Sø, Dø, Dl geometriska variabler
AINV en 2x2-matris, som är inversen till
rotationströghetsmatrisen A
Gl tyngdaccelerationen
AM en vektor med två komponenter, som
beskriver systemets translations-tröghet.
4. Subroutiner som anropas
subroutine VAEGP(T, Z, ZD, ZDD)
subroutine FFFD(T, Z, ZD, FCø, FCl, FKø, FKl) subroutine MATMP(X, M, N, Y, L, Z6)
Subroutine
FFFD(T,Z,ZD, FCø, FCl, FKø, FKl)
l. Syft
Beräknar fjäderkrafter FKø, FKl och dämpkrafter
FCø, FCl för de i systemet ingående fjäder- och
dämpelementen. 2. Argumentlista
T en vektor med fyra komponenter, där T(l) = ramens vinkelhastighet
T(2) = svängarmens vinkelhastighet
T(3) = ramens vinkel
T(4) = svängarmens vinkel
Z en vektor med två komponenter, där
Z(l) = dragkulans höjdläge Z(2) = vägbanans höjdläge
ZD en vektor med två komponenter, där
ZD(l) = första tidsderivatan för dragkulans höjdläge ZD(2) = första tidsderivatan för vägbanans höjdläge
FCø
FCl
FKø
FKl
dämpkraft mellan ram och svängarm på grund av dels viskös dämpning, given av en exponential-funktion, samt s k coulombdämpning.
på däcket verkande dämpkraft på grund av däckets
egendämpning, given av en linjär funktion. fjäderkraft mellan ram och svängarm, given av en exponentialfunktion.
på däcket verkande fjäderkraft på grund av däckets egenfjädring, given av en linjär
funk-tion.
Variabler införda i subroutinen via COMMON
Sø,
CHø CUø Cl SKø SKl EXF EXCH EXCU UTV CFF CO Dø, Dl geometriska variablerdämpkonstant vid hoptryckning i uttycket för dämpkraften FCø
dito vid isärdragning däckets dämpkonstant
fjäderkonstant i uttrycket för fjäder-kraften FKø
däckets fjäderkonstant
exponenten i uttrycket för fjäderkraften FKø
exponenten vid hcptryckning i uttrycket
för dämpkraften FCø
dito vid isärdragning
hastighetsutväxling för dämparen mellan ram och svängarm
anpassning av coulombkraften vid
över-gången från, ingen kraft när hastigheten är noll, till fullt utbildad coulomb-kraft vid hastigheter till be10ppet något större än noll
4. subroutiner som anrgpas function COUL(CFF, FIDOT)
Subroutine 1. Syfte
VAEGP(T, z, ZD, ZDD)
Anger vägbanans och dragkulans höjdläge som funk-tion av tiden, med andra ord de påtvingade rörelser som systemet utsätts för.
Argumentlista
ZD
ZDD
tiden
en vektor med två komponenter, där Z(l) =
Z(2)
en vektor med två komponenter, där ZD(l)
dragkulans höjdläge vägbanans höjdläge
första tidsderivatan för dragkulans
höjdläge
ZD(l) första tidsderivatan för vägbanans
höjdläge
en vektor med två komponenter, där
ZDD(2) = andra tidsderivatan för dragkulans höjdläge
ZDD(2) = andra tidsderivatan för vägbanan höjdläge
Variabler införda i subroutinen via COMMON
TS
AMP
tiden från T = ø fram till det att den på-tvingade rörelsen från vägbanan Z(2) börjar verka på systemet
en vektor med 2 komponenter, där
AMP(l) =
AMP(2)
amplituden för dragkulans höjdläge amplituden för vägbanans höjdläge
FK en vektor med två komponenter, där FK(l)
FK(2) PI talet TT =
frekvensen för dragkulans rörelse frekvensen för vägbanans höjdläge
3.1415....
function COUL(CFF, FIDOT)
Sthe
Ger ett viktat värde för coulombkraften som funktion
av hastigheten, på så sätt att
,. 1.
1 om I FIDOT l 3COUL =
1
CFF-FIDOT om |FID0T|< GFF
ArgumentlistaCFF anger riktningskoefficienten för COUL
o . l
da hastigheten < EF? FIDOT hastigheten
BESKRIVNING AV SUBROUTINER SOM HÄMTATS FRÅN DATORNS PROGRAMBIBLIOTEK (SSP, PLOTlø)
Subroutine MINV(X, N, DET, L, M)
1. Syfte
Inverterar en matris XFN, N]
OBS! Den ursprungliga matrisen X förstörs och
ersätts av den inverterade matrisen. 2. Argumentlista
X NxN-matris som inverteras och ersätts av den inverterade matrisen
N antalet rader och kolumner 1 X
DET determinanten för X
L, M arbetsvektorer med minst N komponenter Subroutine BEGIN(96øø, l)
1. Syfte
KOppla ihop och anpassa datorn till bildskärmen 2. Argumentlista
överföringshastighet = 96øø Baud
Yttre enhet n:r = 1
Subroutine TPAUSE l. SXfte
Medför att exekveringen av programmet avbryts, och kan fortsätta om RETURN-knappen på bildskärmen trycks
ned. Detta för att behålla utskriften av indata på
bildskärmen för kontroll av indata. Behövs endast
VTI HYBRID COMPUrgg
SUBROUTINE NAME: PLOÅKV VERSION: 1
PROGRAMMER: Håkan Jansson
SUBROUTINE DESCRIPTION: '
Subroutinen PL04KV ritar axelsystem, skriver text till resp. axel
samt plottar f(x,y). Axlarnas längd i cm på hardcopykopian anges i
anropet. Suddning av bildskärmen anges med en separat variabel (IE(2)). FORTRAN CALLING: CALL PLOÅKV(XORG,YORG,XL,YL,ITYP,X,Y,N,XMAX,YMAX,
XMIN,YMIN,XSTEP,YSTEP,ITX,ITY,IE) ARGUMENT EXPLANAIION:
XORG = origos X-koordinat i bildskärmens koordinatsystem (100-1000)
YORG =
-"- Y- -"-
-"-
-"j '
( 50-780)
XL = X-axelns längd i cm på hardcopykopian
YL = Y_ _u_ _u_ _u_ _n_ o
ITYP = 1 anger att 1:a kvadranten skall ritas
2 -"- -"- 1:a och 2:a kvadranten skall ritas 3 -"- -"- alla fyra kvadranterna -"- -"-X = -"-X-vektor
Y = Y_ _N_
N = antal datapar
XMAX = X-axelns maxvärde
MX = Y- _H_ _U_
XMIN = X- á"- minvärde
YMIN = Y- 4 -
-"-
,
XSTEP = steget mellan graderingen i x-led YSTEP = -"- -"- .-"- r y-led
ITX = textsträng som skrivs i underkant av x-axeln (bmx 12 tecken)
ITY = -"- -"- -"- parallellt med y-axeln
-"-IE = en kontrollvektor med dimensionen 2 IE(l) = 0 text till varje "tickmärke"
-"- var 10:e -"-gallermarkering på x-axeln
_u_ _n_ y_axeln
-"- -"- båda axlarna
ingen axeldragning'- bara kurvritning
-"-
-"-
-"-
-"-
ingen TPAUSE
enbart axeldragning med axelsystem enl. 0 ingen TPAUSE
I 1 2 N N _H_ _U_ _li-M _N_ _N_ 3 _N_ _N_ 4 I I I. .l * b U N H N O M b U N t -l H M H I!
IE(2) - O ingen suddning av bildskärmen l suddning av bildskärmen
Anm. Axelgradering sker med formaten: F7.0, IS, F5.2 eller F5.4.
Minsta värde på XORG och YORG för att texten skall få plats: 100,50. Max axellängd: 16.5,12 cm.