STATENS VÄG- OCH TRAFIKINSTITUT National Swedish Road and Traffic Research Institute
FORDONSSIMULATORER av
Olle Nordström och Bo Kihlgren
RAPPORT Nr 14
FORDONS SIMULATORER
21V
Olle Nordström och Bo Kihlgren
RAPPORT Nr 14
3.l 3.2 3.3 3.4 3.5 3.6 3.7 6.l 6.2 6.3 ' 6.4 6.5 6.6 7.1 7.2 INNEHÅLLSFÖRTECKNI NG
REFERAT _
INLEDNING
MOTIV FÖR ANVÄNDNlNG AV FORDONSSIMULATORER Säkerhet
Kostnader
Tidsötgång
Möttekniska problem Repeterbara betingelser
Verkliga systemkomponenter ännu ej utvecklade men funktionen matematiskt defin ierbar
Fordonssimulatorn inte universalmedel
FORSKNINGSUPPGIFTER MED ANVÄNDNING AV SIMULATOR
ALLMÄN BESKRlVNlNG AV FORDONSSIMULATORER
SYSTEM FÖR VISUELL OMVÄRLDSPRESENTATION
F ilmpro ie ktionssystem
System med TV överförda bilder av modellandskap System med datorgenererade bilder
Skuggbildsproiektionssystem
System med direkt betrakning av modellandskap Val av system
SIMULERING AV ACCELERATIONS KRAFTER Motiv för användning av accelerationssimulering
System för simulering av accelerationskrafter SÄKERHETSSYSTEM VTl . Rapport ?4 . Sid _ m A -h b wwm ll l2 15 lö 19 2l 21 21 21 24 29
9.. UPPGIFTER OM BEFlNTLIGA OCH PLANERADE FORDONS- 30 SIMULATORER
9.1
Enkötuppgifter
.
30
9.2 Simulator vid General Motors Corporation, USA 56 9.3 Simulatorer vid University of California, Los Angeles, USA 56 9.4 Simulator vid National Research lnstitute of Police Science, Japan 59 9.5 Simulator vid Nederländska Försvarsministeriet 59
FIGURFÖRTECKNING Figur 1. Figur 2. Figur 3. Figur 4. Figur 5. Figur 6. Figur 7. Figur 8. Figur 9. Figur 10. Figur ll .. Figur 12. Figur 13. Figur 14. Figur l5. Figur l6. Figur l7. Figur 18. :apport 14 . Sid Av General Motors och Corneliinstitutet (CAL) konstruerad bil med 8 variabla köregenskaper., Variable stability car" . Version l .
Av General Motors konstruerad bil med variabla köregenskaper. Senare 8 version med samtliga hiul styrbara.
Förslag till bil med variabla köregenskaper och dubbelkommando publicerat 10 av Cornellinstitutet (CAL) i SAE Journal mars l967.
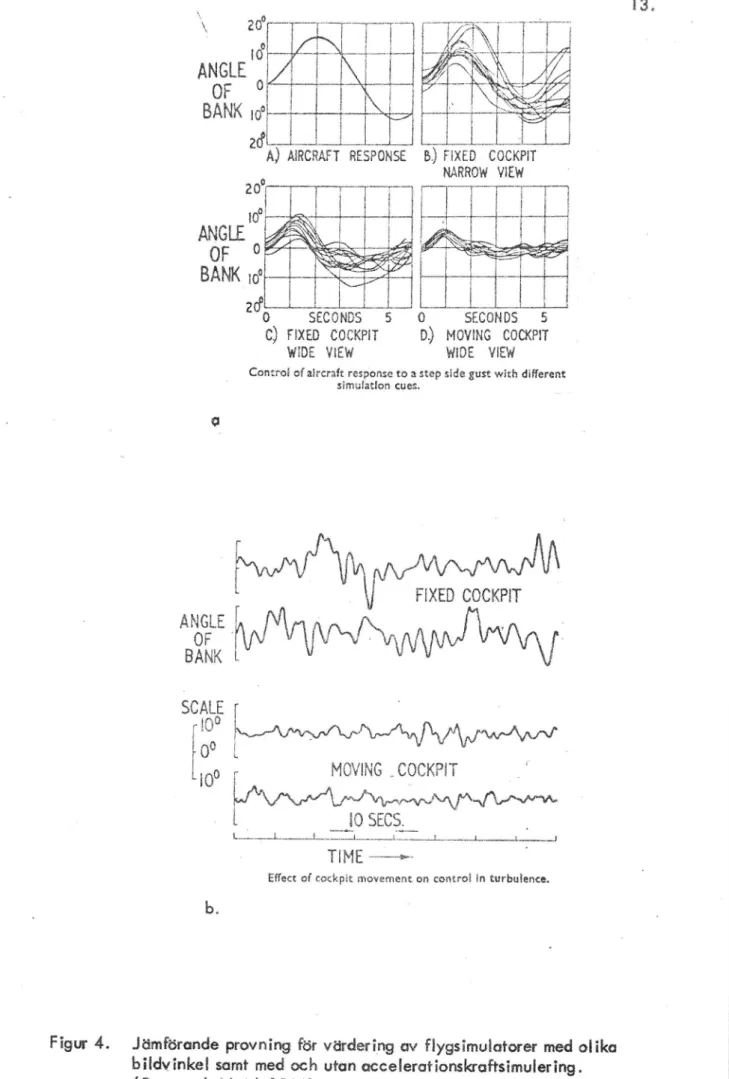
Jämförande provning för värdering av flygsimulatorer med olika bildvinkel 13 samt med och utan accelerationskraftsimulering. (Perry och Naish 1964). Bilsimulator med filmproiektionssystem (Typexempel ).. 14
Bilsimulator med TV-överförd bild av modellandskap (Typexempel). 14 Planerad simulator med TV-överförd landskapsbild och 3600 bildvinkel 17
(Hutchinson 1958, HRB Bulletin 261, 19760)o
TV projektionssystem för flygsimulator utvecklad av General Precisions Ltd. '18 Bilsimulator med skuggbildsproiektionssystem (Typexempel). 20
Bilsimulator med skuggbildsproiektionssystem (Planerad vid VTl 1968) . 20
Bilsimulator med direktproiektionssystem (Typexempel). 20
Jämförande provning för värdering av flygsimulatorer med och utan acce- 23
lerationskraftsimulering (Perry och Naish l964).,
Mänskliga perceptionströsklar för möjliga rörelseformer (McConnell 1956, ). 25
Schematisk bild av fordonsförare i simulator som lutas för simulering av 27 acce lerationskrafter ,
Accelerationer uppmätta på förare och fordon (Woicik och Hulbert l967). 28
Bilsimulator byggd av General Motors (Beinke och Williams 1968). 34 KAKEN -bilsimulator, Japan ( Kobayashi och Matsunaga T. 1963). 60 Chriberg Rii-Educator, bilsimulator byggd av Nederländska försvars- 60 ministeriet... TV proiektionssystem (Principskiss).
Arbetet har utförts vid statens väg- och trafikinstitut och tidigare statens vöginstitut med
anslag från statens trafiksäkerhetsråd.
Syftet har varit att som bakgrund för byggandet av en bilsimulator vid statens vöginstitut, numera statens vög- och trafikinstitut redovisa i litteraturen förekommande uppgifter rö-rande fordonssimulatorer och därmed sammanhängande problem.
Rapporten innehåller en genomgång av motiv för användning av fordonssimulatorer,
an-vöndningsområden, allmön beskrivning, beskrivning av system för visuell
omvärldspresen-tation, system för simulering av accelerationskrafter, säkerhetssystem samt uppgifter om
befintliga och planerade fordonssimulatorer. ABSTRACT
The investigation has been carried out at the National Swedish Road and Traffic Research
lnstitute and earlier at the National Swedish Road Institute sponsered by The National Swedish Road Safety Council ..
The purpose of the investigation was to give a background for the building of a
car-simulator at the National Swedish Road Research lnstitute, now the National Swedish Road and Traffic Research Institute by means of a literature survey over vehicle
simu-lators and problems associated with these.
The report contains a survey of motives for using vehicle simulators, suitableresearch areas, general description, descriptions of systems for visual display, systems for
simu-lation of inertia forces, safety systems and specific data and descriptions concerning car simulators, in use or planned.
INLEDNING
Med fordonssimulator avses i detta sammahang en utrustning Som gör det möjligt att i laboratoriemiliö med hjälp av försökspersoner studera problem som sammanhänger med framförandet av ett fordon under olika betingelser.
Fordonssimulatorer har länge anvönts inom flyget för forsknings-, trönings; och de-monstrationsöndamål . Sedan slutet av 1950-talet har fordonssimulatorer i allt större utströc kning öven böriat användas för simulering av bilkörning inom trafiksökerhets-forskningen för studier av bilförares beteende i trafik och andra aspekter av systemet
mönn is ka-fordon-vög .
Vid statens vöginstitut bedrevs bl a fordonstekniskt inriktad forskningsverksamhet . För studier av fordonets anpassning till föraren för bästa trafiksökerhet bedömdes en avance-rad fordonssimulator vara ett viktigt hiölpmedel . Som en första etapp inför anskaff-ningen eller utvecklingen av ensådan simulator sökte och erhöll vöginstitutet anslag från statens trafiksökerhetsråd för en litteraturstudie beträffande befintliga och planerade
fordonssimulatorer. Vöginstitutet har sedan dess uppgått i det nybildade statens väg--och trafikinstitut som övertag it vöginstitutets arbetsuppgifter. I det nya institutets
arbetsprogram ingår även trafikantbeteende och trafikmed ic in. Anvöndningsområdet
för en simulator har därmed ökat i och med omorganisationen.
Föreliggande rapport utgör en allmän redogörelse för motiv, anvö ndning och uppbyggnad av fordonssimulatorer samt redovisar uppgifterrörande utförda och planerade
fordons-simulatorer. Förutom litteratur rörande bilsimulatorer har även sådan rörande flyg-simulatorer studerats på grund av deras i många avseenden likartade uppbyggnad och för det mesta höga tekniska utvecklingnivå.
MOTIV FÖR ANVÄNDNING AV FORDONSSIMULATORER
Frågan har behandlats av en rad författare (Hutchinson l958, l959, Fox 1960, Bidwell 1961, Marsh l96l , Langsner 1962 mfl)s
Användandet av fordonssimulatorer motiveras av att de helteller delvis kan eliminerasvårig-heter som ör förknippade med verkliga fullskaleförsök.
3.1
3.2
2) Kostnader förbundna med verkliga försök.
3) Tidsåtgång vid verkliga försök.
4) Mättekniska problem vid verkliga försök. 5) Repeterbara betingelser.
6) Verkliga systemkomponenter ännu ej utvecklade men funktionen matematiskt
definierad .
S äkerhet
Vid fältförsök är det ofta svårt att skapa försöksbetingelser som eliminerar risken för farliga kollisioner eller för att försöksfordonet välter med oberäkneliga skaderisker. Höga hastigheter och tunga fordon är speciellt svårbemästrade faktorer . Säkerhets-problemen gäller inte bara försökspersonerna utan även övrig försökspersonal ., I en simulator kan riskerna för försökspersonen hållas på mycket låg nivå och övrig perso-nal utsätts i princip inte för några risker°
Kostnader
Kostnaderna för fältförsök hänger samman med behovet av försöksutrymme, bankvalitet, mätutrustning, försöksfordon och säkerhetsanordningar, men även med tiden för
kalibre-ringar, ändring av försöksparametrar och andra förberedelser inför varje körning.
En simulator är ofta dyr i utveckling men de direkta kostnaderna för varje försök kan
i regel göras avsevärt billigare än motsvarande fältförsök genom att återställning av begynnelsetillståndet och omställning av försöksparametrar som last, däc kutrustning,
motorstyrka m m snabbt och utan speciell apparatur kan göras genom ändring av tex
analoga spänningar i en analog dator .. J u fler försök som måste göras desto
gynn-sammare ställer sig i regel simulatorn beroende på den höga initialkostnaden.
3.3
3.4
3.5
T idsåtgöng
Tiden för byggande och utprovning av en simulator torde ofta vara längre än tiden för' iordningställande av ett fältförsök. Däremot kan man nästan alltid räkna med mindre tidsåtgång per körning i försöksserien. Skall ett stort antal konstruktionslösningar
beträffande fordon eller vägmiliö studeras torde simulering i många fall vara det enda realistiska alternativet med hänsyn till begränsningar i tiden.
Mötte kn iska problem
Ett fordon är i flera avseenden en mättekniskt besvärlig miljö med utrymmesbrist, begräns-ningar i tillåten vikt på mätutrustning, vibrationer som ställer krav på instrumentens och mätdonens okänslighet för yttre störningar m m.
Vid användning av en simulator kan mätinstrumenten placeras i laboratoriet utanför
simulatorn och de flesta mätstorheter som erbiuder problem vid fältförsök beräknas i den dator som styr simulatorn .
Repeterbara betingelser
Vid fältförsök kan repeterbarhetsproblem uppstå genom att väderleksbetingelserna varierar.
Däc kslitage, bromsslitage, temperatur beroende hos fordonsfunktioner och vägfriktion,
åldring, spridning i egenskaper hos komponenter av förslitningstyp är andra exempel på
svårigheter. I en simulator är sådana storheter oftast matematiska funktioner i en dator och därför mycket väldefinierade och stabila.
Verkliga systemkomponenter ännu ei utvecklade men funktionen matematiskt definierbar. Vid fältförsök är man hänvisad till existerande systemkomponenter. I
forskningssamman-hang är det emellertid ofta av intresse att studera i vad mån det skulle löna sig att försöka
åstadkomma komponenter med egenskaper som dagens teknologi inte tillåter eller som kräver stora investeringar men skulle vara ekonomiskt försvarbara i stora serier. Stora trafikanläggningar ställer sig i regel för dyrbara att producera i full skala på ett
experi-mentområde för utprovning med hänsyn till säkerhet och kapacitet varför de måste byggas
Med simulatorteknik kan man ofta på matematisk väg utan svårighet åstadkomma
önskade komponentegenskaper respektive bygga upp anläggningar i modellskala.
3 .7 Fordonssimulatorn inte universalmedel
Av det föregående framgår således att många problem lämpligen eller enbart kan lösas med hiälp av fordonssimulatorer. Detta får dock inte leda till den missuppfattningen
att alla med bilkörning förknippade problem kan och bör lösas med simulatorteknik.
Ehuru egentligen uppenbart kanske vikten av validering av simulatorresultat mot resul-tat i den verkliga situationen så långt detta är möjligt ändå bör betonas. Simulatorns återgivande av verkligheten är alltid begränsad varför fältförsök givetvis bör göras om simulatorstudier inte motiveras av tidigare anförda skäl.
4. FORSKNINGSUPPGIFTER MED ANVÄNDNING AV SlMULATOR
Som exempel på forskningsuppgifter där simulatorer har kommit till användning eller
med fördel bör kunna användas kan följande nämnas:
l) Undersökning av förarbeteende under sammanhängande relativt händelselös körning
under inverkan av
A. Reversibla effekter: a) Trötthet
b) Vissa mediciner c) Hunger
d) Törst (vattenbrist)
e) Temperaturrubbningar (feber)
B. Icke reversibla effekter: a) Åldring b)
Synförluster-c) Förlust av lemmar d) Vissa mediciner
2) Värdering av konstruktiv utformning av vägsystem utan hänsyn tagen till förarens samverkan med andra fordonsförcsre.
A. Studier av skyltars effektivitet för motverkande av inkörning på motorväg via
avfartsramp.
B. Studium av lämpligaste geometri på avfartsramp med hänsyn till risk för singel-olycka vid avfart.
C . Studier av siktsträckans betydelse.
D. Studier .av trafikmaskineriers utformning med hänsyn till säker och effektiv trafikavvec kl ing .
3) Kökömi-ng (avståndsanpassning)
4) "Time-Share forskning (samtidigt utförande av flera operationer som avlösning av skyltar samtidigt med framförande av fordonet i trafik)
5) Studier av olika fordonsegenskapers betydelse för förarens förmåga att säkert framföra
sitt fordon .
A . S idv inclsløzåinsl ighet
B . Ratturvöx!
C . Understyrning - överstyrning D . Framhjulsdrift - bakhiulsdrift
E . Bror-'nslaaftsymmetri : höger - vänster hiul F. Bromkraftfördelning : framhjul - bakhiul G . Pedalkraft för viss ret'ardation
H . Antilåsningssystem för bromsarna
I. Framhjulens och bakhiulens styrgeometri
L. Olika ktypers styrkarakteristika
7) Studier av balansorganens betydelse vid bilkörning, speciellt i samband med sladd
8)
Rekonstruktion av olycksförlopp för analys av orsakssammanhang9) Studier av inverkan av buller och vibrationer på manöversäkerhet, observans av skyltar samt observans av övriga trafikelement.
ALLMÄN BES KRlVNlNG AV FORDONSSIMULATORER
Fordonssimulatorer brukar ofta indelas i delsimulatorer och totalsimulatorer där de först-nämnda endast .återger en mycket begränsad del av bilkörningen tex ett pedalarrangec' mang för att studera inverkan av brornspedalens höjd över gaspedalen på tiden för broms-ansättning och de sistnämnda i princip försöker efterlikna hela bilkörningen. Eftersom alla simulatorer har sina begränsningar beträffande realism är dock en klar gränsdragning inte lätt att göra. För totalsimulatorer har man försökt sig på en indelning i fyra kate-gorier (Hutchinson 1958) baserad på hur nära man kommer den simulerade verkligheten. Dessa är föl iande
1) Verklig bil i verklig omgivning. Denna typ av simulatorer består. .av-inStrumente-rade bilar där önskade storheter kan uppmätas. Det kan ifrågasättas om det här verk-ligen kan sägas vara fråga om en simulator.
2) Simulerad bil i verklig omgivning. l detta fall består simulatorn av en bil som körs
i verklig omg ivning. Bilen är emellertid utrustad med en dator och servosystem för
alla körfunktioner så att förarens manövrer resulterar i styrs ignaler till datorn som
beroende på vilka köregenskaper man programmerat in resulterar i styrutslag m m
som ger bilen den rörelse det simulerade fordonet skulle fått. Genom styrning av bakhjulen kan således ett intryck av sladd erhållas utan att fordonet sladdar i
verk-lig mening. Om dubbelkommando installeras kan försöksledaren överta styrningen .
Simulatorer av denna typ har byggts av Cornell Aeronautical Laboratory för General Motors (Bidwell 1961 och Dunne 1969 ). På den första av dessa "variable stability
cars kunde enbart framhjulen och rattmo'mentet påverkas (fig 1 ) medan på den
senare, en ombyggd Buick Wildcat 1966 även bakhiulen kunde påverkas av datorn ( fig 2 ). 1 en annons i SAE Journal, mars 1967 visar Cornell Aeronautical Labora-'1. Rapport 124:-.
CAR KN1ON SEHSORS 1 r 1 ROLL RATE Y .wa Mmm-mmm . . . -. . . mw : l? Hmmm: IORQUE
trawmm mamma; ANGLE .acszäaååmm "W WWW ?WC-*U5Såi'âvü
:o C C: ;b :2:0 r. t' 65. 1!
i \ -.. ;rm-x. ;125mm manus mmsnucm I. .. :i...4 rr 'l 33 'k t 1 _ CA!? SPEED \
$
'
R
'57 I! 1 V 1 g " STEERWG TORQUEFROM! WHEEL ' mor-a w' _ . mom
POSH'SGN COMPUFER PGSIHDN
?gar-.n mm :aâ'JTUFJOR
Figm' 3.. fw ämmêååmfêêuiet (CAL) konstruerad bii med. variabla
käfügünâåkmpuü Variüäräe smbiåêty car . Version 1 .
WMWLE TRARQQUCER
TRÅNSIHJCER '
F 39.02' 2. Av General Motors konshuamd bil med variabla köregenskaper. Senare
_ varsion med samfê'ága Mu! sfyrbam .
heten. Genom att det rör sig om fordon i verklig omgivning kvarstår
säkerhetsproble-men om än i reducerad grad.
3) Normal bil i med hänsyn till realism begränsad omgivning. Detta innebär körning på
provbana med förenklad miljö såsom uppmålade körfältsbegränsningar på ett flygfält.
En simulatorbil av den typ som beskrivits under 2) kan givetvis användas även här.
4) Verklig eller simulerad bil i simulerad omgivning. Denna typ av simulatorer består av en standardbil eller en attrapp försedd med en bils normala manöverorgan och instrumentering. Föraren kör på normalt sätt och omgivningen presenteras på nå gon form av bildskärm. Accelerationer simuleras i förekommande fall genom att hela simulatorn roteras eller förskjutes linjärt så att önskad accelerationsriktning erhålles En närmare beskrivning av olika system för bildgenerering och accelerationskraftsimu-lering återfinns i kapitlen 5 och 6. Eftersom behovet av rörelsesimuaccelerationskraftsimu-lering främst av kostnadsskäl ofta är föremål för diskussion har även den frågan behandlats i kapitel 6. En bilförare utsätts för ljud såväl från den egna bilen som från omgivningen vilket ger honom viss information om bilens hastighet, vägbanans beskaffenhet m m. Många simu-latorer är försedda med anordningar som återger motorljud från den simulerade bilen. l de fall en komplett bil utnyttjas användes normalt bilens motor som ljudkälla. I de flesta fall härrör dock ljudet från inspelningar av motorljud eller också alstras det på
elektronisk Väg. Även övriga ljud åstadkommes på något av sistnämnda två sätt. Andra informationskällor för en bilförare är de krafter som utövas på ratt och pedaler.
I en verklig bil är rattmomentet inom vissa gränser i stort sett proportionellt mot
sid-accelerationen. Vid ökande hastighet ger alltså en viss rattvridning allt större moment
medan man vid konstant hastighet har ett moment som ökar med rattvinkeln.
Rattmo-mentet är således såväl hast ighets- som rattvinkelberoende., Detta kan åstadkommas med en datorstyrd servomotor. Ofta nöjer man sig dock med en enkel fjäderbelastad rattaxel, som ger ett rattvinkelberoende moment. Då en verklig bil ingår i simulatorn
kan i stället framhjulen vara uppställda på vridbara plattor, vilkas vridningsrörelse mot-verkas av fjädrar eller servomotorer. Gaspedal , bromspedal och kopplingspedal är i
regel fjäderbelastade. 'TI . Rapport låtit.
33%, åxå - " w?"MLJW- .A "A M 3% ? gå' \1 »g KW'M ' wwüuwumm du, »ak .r "' H3
F Egur 3. Förs'êczg HH biå varêaåaêü :Ezâmgamkmpâr mh cåübbelkümmmnáø publêçmm av Ccä'neüimñtuêm (iZAL) 5 Så?? Joeurmi mms 1967..
I en bil förekommande instrumentering finnes oftast även i bilsimulatorer, speciellt gäller detta hastighetsmätaren. Dessa instrument bringas att ge utslag som motsvarar den simu-lerade rörelsen. I vissa simulatorer förekommer även luftkomditionering bla pg a värme-utvecklingen från ljuskällan i det visuella systemet. Styrningen av de organ som ger föraren sinnesintryck i enlighet med hans påverkan av manöverorganen sker i vissa simu-latorer rent mekaniskt medan de flesta för detta ändamål utnyttjar datorer av analog digital eller hybrid typ dvs en kombination av analog och en digital dator. Hittills har analoga datorer dominerat. Numera torde dock ett hybridsystem vara den bästa lösningen. Den digitala delen utnyttjas då för beräkning av de mera lågfrekventa förloppen såsom tyngdpunktens förflyttning medan de högfrekventare såsom hjulvarvtal i samband med hjul låsning beräknas i analogdatorn .Ehuru det är teoretiskt möjligt med parallellt arbetande digitaldatorer används inte ens i rymdsammanhang helt digital simulering bla av kostnads-skäl och på grund av att digitaldatorns fördelar i fråga om precision inte kan utnyttjas. _ För bilsimulatorer gäller samma överväganden i ännu högre grad speciellt på kostnads- I
sidan .
En bilsimulator måste dessutom vara försedd med utrustning för mätning och registrering av de storheter som är intressanta för de i simulatorn bedrivna undersökningarna. Exempel
på sådana storheter är fordonets rörelse, manöverkrafter, -hastigheter, -amplituder antal, förarens pulsfrekvens, EKG, hudreaktioner, blic kfokusering m m.
SYSTEM FÖR VlSUELL OMVÄRLDSPRESENTATlON
Att förarens synintryck är den viktigaste förutsättningen för bilkörning är man tämligen ense om. Vilka egenskaper hos den visuella omvärldspresentationen som är av den största betydelsen är däremot svårare att besvara entydigt då det i hög grad är beroende av vad man vill undersöka med hjälp av simulatorn.
Karakteristika hos ett system för visuell omvärldspresentation kan anges i form av bild-vinkel, ljusstyrka, skärpa, färgkvalitet, kontrast, detaljrikedom, väglängd, möjligheter att variera simulerad miljö, möjligheter till interaktion med andra trafikanter,
möjlig-heter för föraren att själv välja färdväg och i övrigt påverka det simulerade fordonets
rörelse. Med hänsyn till dessa sistnämnda möjligheter brukar man tala om sådana med
programmerad och icke programmerad återgivning. Programmerad återgivning medger inte att föraren väljer färdväg. Fullständigt programmerad återgivning är inteså vanlig.
Oftast kan man variera hastigheten inom vissa gränser.
12.
Bildvinkelns betydelse i bilsimulatorsammanhang har veterligen inte dokumenterats. När det gäller flygsimulatorer har man däremot gjort jämförande prov med liten och stor bild-vinkel och funnit påtagligt större förmåga hos piloter att korrigera av störkrafter orsakade svängningar vid stor bildvinkel än vid liten.
Resultat från sådana prov med bildvinklarna 35O resp 2000 (Perry och Naish l964) som
visar avsevärda skillnader återges i figur 4.
Det perifera seendet tycks alltså ha betydelse åtminstone i sådana fall där stabiliteten hos systemet förare-fordon är beroende av förarens åtgärder, vilket ofta är fallet vid
bilkörning .
Bildkvaliteten med avseende på ljusstyrka, skärpa och detaljrikedom har betydelse för simulatorns realism och är givetvis anörande om man vill studera problem som direkt har med dessa storheter att göra såsom observans av trafikmärken, betydelsen av god syn-skärpa m m. Möjligheter till miljövariation är givetvis önskvärd även om vissa erfaren-heter tyder på att "miljöminnet" är relativt kort. Undersökningar vid körning med hög ' hastighet ställer större krav på stor väglängd om inte monoton miljö kan accepteras.
Möjligheter till icke programmerad visuell omvärldspresentation är nödvändig vid
under-sökningar som gäller fordons manövrering medan man i andra fall där man endast studerar observans och initial reaktioner på olika trafiksituationer kan klara sig med programme-rad sådan som är betydligt lättare att åstadkomma med hög visuell realism.
För bildgenerering användes i huvudsak följande metoder. l. Filmprojektionssystem
2. System med TV överförda bilder av modellandskap 3. System med datorgenererade bilder
4 . S kuggb i ldsprojekt ionssystem
5 . System med direkt betraktning av modellandskap via linssystem
F i l mproje ktionssystem
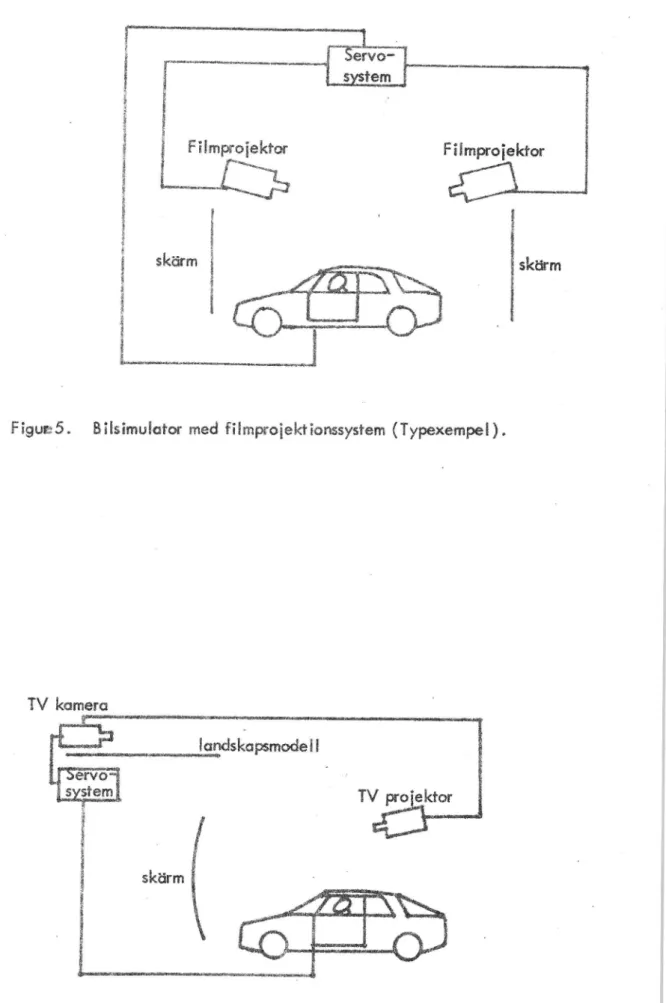
En typisk simulator med filmprojektionssystem visas i figur 5.
Filmprojektionssystem ger för närvarande den högsta bildkvaliteten med hänsyn till skärpa,
ljusstyrka och detaljrikedom. Eftersom systemen baserar sig på filmer inspelade från en bil i verklig trafik är det enkelt att åstadkomma relativt långa körningar och miljön blir
:0
a
ANGE
0 F 0\
'x x .. kg): Vi..4/4
BÅNK .go
\TJ
då
i
J
20
A) AiRCRÅFT RESPONSE B.) FiXED (200me
NARROW vssw
*355%
0 saconns 5 0 sgconos 5 C) man cøcxm n.) MOWNG cøcxprr moi-2 vsgw WE WEW
Contmê' af aircraf: response to a step side gast with different såmufatton cues.
FEXED cocxpg
www/vw 1 T a 4_
Mån (WWANJHJLM
BANK L SCÅpLg ' 4Lac,
mmm »COCKEJW
_ . "
WWÅfm/ WWMJMáWNW/NW. _
Mig 5535;,...
'
TEME www
Effect ut' cackpêt mcvament tm contmi in åwbuienm.
b.
Figur 4. Jämförande provning ?är värdering av Hygs's'muêceforer med Mika
biidvinkm samt med och utan acceiemfäonskmffsimuiering. ( Perry och Naish 1%4) . .
§4. i?" ' h 1 . Servo* 1 sig-em , ' Fiimwafekfor Fiimproiekfor
skärm
Skäm
FigumS. Biåäimufafar med fiimpmäeküonssystam (Typexempei).
TV kamera
iagásláapsmødeêl
TV prikmr
skärm
Figur 6.. Bilsämulmcr med TV'överförcå Mid av modellandskap (Typexempel ).
helt naturligt mycket realistisk,och situationer med människor och andra trafikanter i bilden är lätta att erhålla. Färgåtergivning erbjuder inte heller problem. Bildvinklar på upp till 1500 a 1800 framåt plus 400 bakåt_ har åstadkommits genom system med flera kameror, resp projektorer (Wojcik och Hulbert 1967, Quatresooz 1967). Nackdelen med filmprojektionssystemen är att de med nödvändighet blir programmerade. Det enda föraren kan göra är hastighetsändringar och mindre sidoförflyttningar. Möjligheterna till
hastighetsändringar är dessutom begränsade så tillvida att inbromsning till stillastående
inte kan göras. En minskning av hastigheten till en tredjedel av inspelningshastigheten och en ökning till det dubbla är möjligt i vissa system. intryck av sidoförflyttning kan erhållas genom vridning av projektorn kring en vertikal axel styrd av rattrörelsen. Förflyttningsmöjligheten är dock mycket begränsado Genom ett system med två projek-torer med filmer inspelade i var sitt körfält kan man byta körfält genom att skifta pro-jektorbild. Sidoförflyttningen sker dock mer eller mindre momentant.
Denna typ av visuell omvärldspresentation lämpar sig främst för studier av förares initial-reaktioner på olika trafiksituationer, studier av vissa trötthetsfenomen , observans av av trafikskyltar och liknande där bilens dynamiska egenskaper kan bedömas ha liten betydelse .
System med TV överförda bilder av modellandskap
En typisk simulator med sådant bildsystem visas i figur 6.
Vid televisionsöverförda bilder används för upptagningen en TV-kamera, som rör sig i ett modellandskap på samma sätt som den simulerade bilen skulle göra under inverkan av förarens handhavande av manöverorganen. Simulatorer med sådana system har anVänts I av bla Wallner 1969, och Chenchanna 1970. För att kompensera kamerans begränsade bildvinkel kan man dessutom överföra förarens huvudvridning till TV kameran (Chriberg Rij-educator). Denna rörelse är då överlagrad fordonsrörelsen. Kameran kan antingen vara vridbart upphängd i en travers, som rör sig över landskapet, eller vara inmonterad
i en modellbil . Traversens rörelse och kamerans vridning resp modellbilens rörelse
regleras av den dator som beräknar fordonets rörelse på grundval av förarens styråtgärder. Om en modellbil användes blir möjligheterna att återge ett fordons dynamik i regel mer begränsade än med ett traverssystem. Med ett modellfordon kan man å andra sidan om kraven på fordonsdynamik inte är så :stora nöja sig med att direkt överföra förarens l'l . Rapport tål..
16.
styrutslag och gaspådrag till motsvarande funktioner på modellbilen och därigenom spara datorkapacitet. Den av TV-kameran upptagna bilden projiceras antingen med hjälp av en vanlig TV apparat eller med en TV projektor och en projektionsskärm. Genom använd-ning av en hyperboloid formad spegel framför TV-kameran och en ellipsoidformad spegel framför bildprojektorn har man lyckats få en återgivning som täcker alla riktningar från föraren. Veterligen har dock systemet aldrig kommit till praktisk användning i en
bil-simulator. Enligt Wojcik och Hulbert (l967) var det svårt att erhålla tillräcklig
ljus-styrka och bildkvalitet. Figur 7 visar ett av Hutchinson 9559) presenterat förslag till en simulator med sådant system. | de flesta fall är synfältet av storleksordningen 600. Som nämnts i det föregående har man i ett fall försökt kompensera den lilla bildvinkeln genom att låta förarens huvudvridning styra TV-kameran så att ett vinkelområde på 2400 kan avsökas (Chriberg Rij-Educator, se även separat beskrivning i kapitel 7).. TV systemen ger möjligheter till såväl färg som svart-v it återgivning.
Uppgifter om bildkvaliteten på TV system som använts i bilsimulatorer tyder på att
åt-minstone billigare system brister i ljusstyrka och upplösning° Ett vid General Precision Systems Ltd utvecklat TV system för flygsimulatorbruk anges dock ha mycket goda prestanda. (Edwards, General Precision Systems Ltd, tryckår saknas, troligen 1959 ), Figur 8 visar detta system i en flygsimulator. Landskapet är modellerat på ett ändlöst
band som drivs över två rullar. TV-kameran är rörlig i tvärled och kan även åstadkomma tipp- och rol lrörelser .
System med datorgenererade bilder
| sitt enklaste utförande kan ett sådant system alstra en enda vertikal linje som presente-ras på en oscilloskopskärm och kan flyttas i sidled genom rattrörelsen.
Dessa system återger oftast omgivningen i form av ett perspektivtec knat strec klandskap
där vägbegränsningen i vissa fall markeras med vertikala "stolp" linjer (Nordström, L 1967), i andra fall med begränsningslinjer motsvarande kantmarkeringar. Plötsligt
upp-dykande hinder kan inprogrammeras i ett sådan landskap. Med ledning av uppgifter om
fordonets läge i landskapet som erhålles från programmet för fordonets dynamik kan då'
torn kontinuerligt producera en perspektiv isk riktig bild på en oscilloscopskärm. Genom lämpliga linssystem (kollimatorsystem) kan ett tredimensionellt intryck erhållas.
Fördelarna med dessa system är att man förhållandevis lätt kan variera vägens
TV pröjsa.th Eålipsoicåal minor Fiat minor '
" ' TV camera Computer
- MÄMMW- ' i
Real car contaimng abserver
i_ ;i il .
-ÅA ; - . structure
FEgur 7. Planerad såmuåmür mac? Tvmöverförcå ianáskapsébiid och 3600 bildvinke! (Hufchinsøn 3958, HRB Quiåmän Zél, 1960 ).
Figur 8. VT! . Rapport] 4.
l . : .N nm no p A 1. 4' V W _ A A < A .. -. .. .a m v ., v \ V m a -T W F W H ,. .-,. 5 , _ 4 I I . M * _4 : 5 : s_ i 4 4 V ' I ' . ' 'A' 5 .. .m 4 . < ' '_ _ . ä ,7 V.: jV_ .w n 't ._ -i. _31_ _ u I .v. .;: .1 1-v _ <1' -*' 6* m \ 1 ; » U . Sv ' _' _ -...S v* i .. _ I 4 _I a ' V ut: _ 'l ig -w" ... g < , ' 5 l e åâåññä
l :gå , . V ä 1 ' 1= '1" / må *mm , I; www .v &gxäaêa I :r: ir § <' ' v ;öng \ 4 " (J i's 4 'Ez 11:91* ' m gafwâ* ' ' ååh m ?53 343 55 -1 ;321 ,. RA k w-M *km I .JL i' m. . V, »N \ m M m m m m m ?xx9* f . ( Fb' 5 :r aw WN ? b* i 5; 'att 2:: \5 r'Y '1 .pa Åx"1 afasi . V59 fä ?I ?ÅFWÃ'ER j ? w 'Nära" 3... r _ §\.af§ " Wä a» .øfj ,; MW xx f.:-#\ *å ä"*%ør 'f Cüävüüåå
âchamam: ai'swøåw mmm-mä ?aaiw-vzäámaâw Wwaá Emma-t.
?V Wøiêküüüåâyäåüm få? ååy'gwåmwåmmr uWec Mad av Garnera!
?mc 2530315 Ltd .i
6.4
tion och inte har de begränsningar i banlängd som modellandskap är behäftade med. Systemeh är också förhållandevis billiga och driftsäkra.
Nackdelar är brist på detalier och relativt liten bildvinkel (hittills endast cirka 600). Ehuru veterligen ei använt i bilsimulatorer har på senare tid system med datorgenererade bilder sammansatta av fält i olika gråtoner eller färger, s k magnetovision utvecklats. Med denna typ av bilder kommer man ifrån strecklandskapens natteffekt och kan även på annat sätt öka återgivningens detaljrikedom.
S kuggb ildsproie kt ionssystem
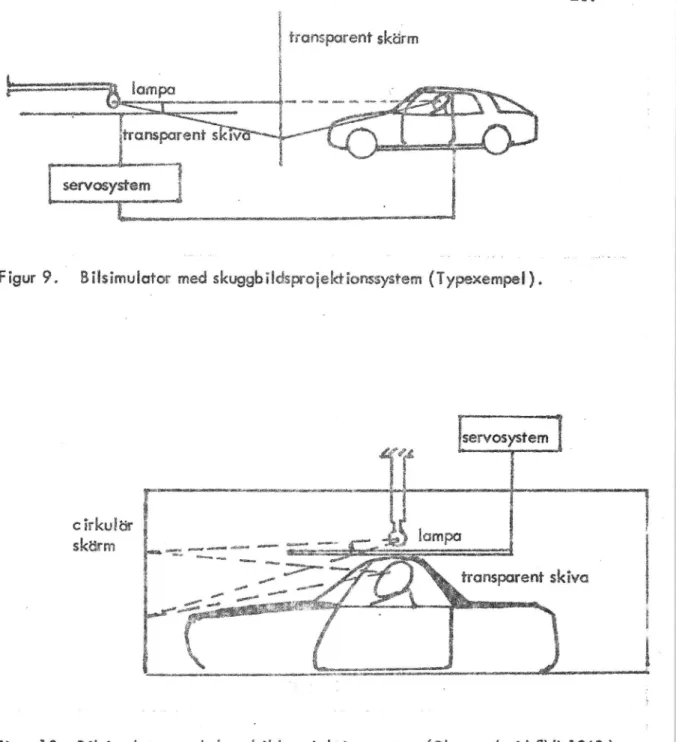
Vid skuggbildsproiektion användes en i förhållande till förarkabinen och bildskärmen fast liuskälla placerad över ett transparent modellandskap på en höjd över detta mot-svarande ögonhöiden hos föraren i ett fordon i modellskalan ( se figur 9 ). Den skugg-bild som på detta sätt alstras projiceras på en halVgenomskinlig skärm. En person placerad på andra sidan skärmen på samma avstånd från denna som liuskällan erhåller då ett korrekt synintryck av landskapet uppförstorat till naturlig storlek. Genom att med en lämplig servoteknik röra modellandskapet i förhållande till liuskällan får simu-latorföraren ett intryck av att färdas i landskapet. Denna rörelse kan styras av föraren
via ratt och gaspedal på så att föraren får en illusion av bilkörning. Genom att placera föraren under modellandskapet och använda en cirkulär skärm kan uppåt 360O bildvinkel erhållas (Nordström, O l968) (figur lO). Placeringen av föraren under liuskällan
medför i bilsammanhang en viss gropeffekt'I . Denna är dock inte särskilt stark och torde i regel sakna betydelse. Den stora bildvinkeln är däremot en stor fördel speciellt
om simuleringens syfte är att studera fordons manöveregenskaper. Flygsimulatorer med
stor bildvinkel har utnyttjat denna teknik (Perry och Naish 1964, Klose l965). Ljus-styrka, kontrast och skärpa har på utförda bilsimulatorervarit .relativt dålig speciellt
iämförd med vanlig filmproiektion. För att förbättra dessa egenskaper krävs större
ljus-effekt, en mera punktformad liuskälla och ett tunnare landskapsmaterial . Utförda bilsimulatorer torde kunna förbättras avsevärt i dessa avseenden. För att komma ifrån
liusbrytningsproblemen mellan luft och skivmaterial har man experimenterat med att ersätta luften ovanför landskapet med vätska i vilken lampan då är nedsänkt. Rörelser
i vätskan skapar dock nya problem ( Rice 1964). För många syften är dock den
upp-nådda bildkvaliteten helt tillräcklig.
-ê' ' ' ' Summa 5" a' i;tmnspcsrøarrr 3 WW v « '-servosyswm
'
L
v
Figur 9. A Eiisimuiafm med skuggbFiáswaåekâêümäystem (Typexempel).
;servosystem
c 'Erkuåär skäzm
Figur 10. Bêêäämuimfczr meá :skugngådspmåekfionssysmm (Pianewd vid SV! 1968 ).
linssysi-em _ Wansparent skärm rullade landsväg
Figur H 7. Bilsimulatm* med direkmro'g'ektianssystem (Typexempel ).
6.5
5.6
System med direkt betraktning av
modellandskap-Denna typ av system som illustreras av fig ll består i regel av ett ändlöst band på vilken vägbanan ör uppritad. Detta band betraktas via ett lins- och eventuellt även spegel-system direkt av försökspersonen. Fordonets hastighet kan kontrolleras genom ändring av bandhastigheten och läget i sidled genom att flytta förarkabinen eller hela vägsyste-met i sidled. Möjligheterna till kurvkörning är dock ytterst begränsade genom att vä-gens riktning i stort sett måste vara parallell med bandriktningen.
Fördelen med systemen är god liusstyrka och bildskärpa.
Val av system
Alla beskrivna system har sina specifika för- och nackdelar . Filmproiektionssystemen synes vara de mest fördelaktiga då man vill presentera trafikmiliöer med högsta realism
t ex med människor i bilden men där man inte har krav på mer än initialreaktioner
när det gäller manövrering av fordonet. l övriga fall torde TV eller skuggbildssystem vara de enda tänkbara. Vilket av dessa system man skall völia beror på uppgiften. Skuggbildsproiektion tillåter med relativt låga kostnader mycket stor synvinkel. TV tillåter större modellandskap och åtminstone i de dyrbarare systemen bättre liusstyrka och
upplösning samt möjligheter till god färgåtergivning.
S IMULERING AV ACCELERATIONS KRAFTER Motiv för användning av accelerationssimulering
System för accelerationssimulering är dyrbara och medför ofta påtagliga tekniska problem. Om de inte ger något väsentligt bidrag till ökad simulatorrealism finns det därför inga skäl att ha sådan. Behovet av rörelsesystem har berörts av flera författare. Hutchinson 1958-59, Bidwell 1967, Woicik och Hulbert 1967. McKelvey 1967, Beinke och
Williams 1968 är exempel från bilsimulatorsidan. Flera av dessa konstaterar att inverkan
av accelerationer har stor betydelse vid bilkörning. Risken för åksiuka är enligt Beinke och Williams mindre med accelerationssimulering påkopplad i deras simulator. Bidwell
säger sig ha haft negativa erfarenheter av rörelsesimulering men menar att det är en fråga
om hur väl man lyckas få bild och rörelse synkroniserade. 'TI . Rapport fil..
22.
Bilsimulatorstudier av extrema manöversituationer med och utan accelerationssimulering i en simulator med oprogrammerad rörelseåtergivning i syfte att experimentellt påvisa
inverkan på förarens prestationsförmåga synes ei ha utförts.
På flygsimulatorsidan har frågan berörts av A'ttarrah 1965, Cooles 1964, Klose 1965, 1966, Sadoff och Harper 1962, Perry och Naish 1964, Allen Jr, Doty,Jr McCormick, Fraser 1966, Cohen 1970. Perry och Naish har med experiment kunnat visa påtagliga skillnader i manöverresultat med och utan rörelse vid simulering av konventionella flyg-plan. Dessa skillnader framgår av figur 4 och 12. För överliudsflygplan har man också funnit fall där accelerationssimulering varit betydelsefull. Accelerationssimulering kan antingen innebära att flygplanet blir lättare eller svårare att flyga 'jämfört med fast
simu-lator. 1 de fall där uppgiften blir svårare med accelerationssimulering är det således
väsentligt att den används vid simuleringen då man annars kan riskera haveri vid verklig flygning. Träning GV PllOieT l SfmUlGiorer med och utan accelerationssimulering har
visat att bättre resultat erhålles med accelerationssimulering speciellt när det gäller
helikoptrar. Allmänt tycks gälla att flygning under stabila förhållanden kan göras i
fasta simulatorer medan accelerationssimulering blir betydelsefull när man närmar sig
gränsen för instabilitet och där relativt högfrekventa rörelser MO,5 Hz och däröver före-kommer. För bedömning av risken för pilotinducerade svängningar är accelerationssimu-lering viktig.
Simulatorprov avseende landning där hiulbromsarna sätts ur funktion utförda med och utan accelerationskraftssimulering har visat en reaktionstidsökning från 1,5-3 sekunder till 7-10 sekunder (Cohen 1970 ). l bilsammanhang torde förhållandena vara mera kritiska.
En annan aspekt som bedömes som mycket viktig är att förarens verklighetsintryck och
därmed hans förmåga att leva sig in i den simulerade situationen ökar. Man har hävdat
betydelsen av detta inte kan betonas starkt nog.
Sammanfattningsvis kan man konstatera att starka skäl talar för accelerationssimulering
bör ingå om problem där fordonets manöveregenskaper har någon betydelse skall studeras. Fast simulator kan i allmänhet användas i övriga sammanhang. Risken för åksiuka synes
minska om accelerationssimulering finnes vilket är ett motiv för att den används även där den inte är nödvändig av andraskäl.
mm mm*
SEMULATEON
EGO-O SPECTRÅå. ;322mm
giltiga
: c ;CKPlT MWg-0 smuww05-?
i. 0 0:2 8CYCLåS PER SEC-SNB
Analysis »of bank angics in fixed and moving simulatiøn.
47 i ..-..._._r ,._-A._.._W. ,T....___.M-... _.- .. V I % I mm .. i...Wn ... t_ ...WW 5... q. 4, 4. .. é _ § .. .. L ..._w_ 4,. ... ...w å i i ? é N .0... vw .. .. .. ..4 nu..- ...mf -.--... U, f-..m.. .. ' __ 4 êx i. 2 i 2 5 ;, .. .... .. -v . M,... .. . . _ I _.. .... .. --.15....u..._...'. á !S 2 .is ni i ti r.I 1.' k l 4 I ' ... mm-: _....n w..-i...,. -. Np... .'...y. .. , ...24 ...g 1. 'i5 1 11% , f3 ai : 4_' .9L .1. i
*000
w 4gg
gwm$\WWmedwwx,
SPECTRÅL
° tg"4r* f ;§§%>4:%äg*iä"å:äEääåå-v* 1
.4 *» Tåligiöpkf..31., *DENQHY
OF
2
i
Aaäaom
ANGLE
r 5 så . 'i .. ..-Mt .. ..._ . .L y... n = 2k. Xi. x100 ---- w
x "w-Xçägxsjwwx I
m.,
7"?" 3x. 1; H' [RIX *t \\ 'Xx,.üFct,
"kk-*f .. ' _" x\
i .XX ' h, ..X \_ W ._JTW.M \ \o-m0'3*<§_ \.Shi 30 i . . O OI (32 03 04 Gå G6 07 08 09 H)
*SYCLES ?ER SECüå-RID
_ Andysis ef mntroi angfas in fixar!! :md :Having simuiatlon.
Figur ?2. Jämförande prövning för V"§T§;å*{§&3ringg av fiygsimuiafører'med och utan accelermionskmftsi'muêeräng Wern" mh Naish ?964).
7.2
24. System för simulering av accelerationskrafter
Vid bilkörning utsätts en bilförare på grund av bilens rörelser för såväl linjära
accele-rationer som vinkelacceleaccele-rationer. Dessa acceleaccele-rationer kan uppdelas i komponenter i bilens längd, tvär- och höjdaxelriktningar.
Vid hastighetsändringar i fordonets längdriktning utsätts föraren dels för linjär
accelera-tion dels för vinkelacceleraaccelera-tion orsakad av nic krörelse dels hos fordonet dels hos föraren
själv eftersom stolsryggen är fjädrar] och förarens huvud normalt inte är fixerat till
for-donet. Vid kurvtagning erhålles linjär acceleration \ huvudsakligen i fordonets
tvär-riktning samt vinkelacceleration dels kring fordonets höjdaxel dels kring fordonets längd-axel. Den senare orsakas av fordonets krängning och av förarens rörelse relativt fordonet av att accelerationskrafterna överförs till föraren via förarstolens fjäders its och ryggstöd. Rörelsen hos förarens huvud erhålles huvudsakligen med muskelkraft.
Vid körning rakt fram på ojämn väg erhålles linjär acceleration huvudsakligen i vertikal-led och vinkelacceleration kring fordonets tvär- och längdaxel .
Ett helt korrekt återgivande av uppträdande accelerationskrafter skulle medföra att simulatorn rörde sig exakt som det simulerade fordonet. Av såväl tekniska som
kostnads-mässiga skäl är en sådan lösning inte möjlig och knappast heller önskvärd då man därmed
skulle införa en del av de riskmoment som föreligger vid försök med verkliga bilar.
Experiment rörande människans känslighet för accelerationer visar dels att det finns
tröskelvärden som måste överskridas för att accelerationerna skall uppfattas, dels att förmågan att bedöma den absoluta storleken av en vinkelrörelse utan hjälp av synintryck
är relativt dålig. En tabell över känslighetströsklar vid bilkörning utarbetad av Ford
i USA visas i figur l3. Experiment utförda vid University of California med en kring en
tväraxel och längdaxel vridbar simulatorrigg där omvärldspresentationen följde vridnings-rörelsen visade att försökspersonerna hade en mycket grov uppfattning om simulatorns
lutningsvinkel både kring längdaxel och tväraxel (Hulbert och Wojcik, 1963).
Dessa egenskaper hos människan har utnyttjats vid simulering av tröghetskrafter.
Kort-variga accelerationer simuleras således i vissa simulatorer helt korrekt varefter simulatorn
återförs till sitt ursprungsläge med utnyttjande av accelerationer under känslighetströskeln. /Tl . Rapport ill..
_ 0
Figur 13. Mänskliga perceptionströsklor för möjliga rörelseformer [McConell 1956]
Rörelsekorokteristiko
Accelerotionsöndring
Frihetsgrad Läge Hastighet Acceleration per tidsenhef
x gl_>_<_ dzx dax
dt
'5177
:1:3
Tronslotorlsk rörelse
Longitudinell ovk'dnnesei ovkönnes ei 5:0,3 m/s2 ;+5 0,15 grad/53 Lolerol ovk'dnnes ei ovk'cinnes ej 3; 0,18 m/s2 0, 09 grad/S3 Vertikal ovk'dnnes ei ovkönnes ej 5;] ,2 m/s2 0,24 grad/53
Rototiomrörelse
Girrörelse (Yow) ovkönneseinu 5 grad/s :l: 2 grad/52 i. l grad/53
Kröngrörelse i l ,l grodbi 8 grad/s _-1_ 4 grad/52 i 2 grad/S3
(Roll)
. .. b 2 3
Tipprorelse :k l,9grod :g 12 grad/s i 6 grad/s :1; 3 grad/s
(Pitch)
o) Möfbetingelser
l Försökspersonerno satt i stondordbils'rolor 2 Försökspersonerna erhöll inga synintryck
b) Kröng- och fippkönsllghef orsakad av loterolo och longitudinello komponenter ov
grovitotionskroften. Kon ei ovkönnos om ulbolonsering sker genom lolerolo eller
long i'rudinel lo occe lerofioner .
26 ,.
Denna teknik utnyttjas också vid simuleringar där långvariga accelerationer förekommer' för att indikera accelerationens begynnelse- och slutfas medan mellanliggande konstanta förlopp endast simuleras v isuellta
Människans oförmåga att bedöma vinkelrörelser har även utnyttiats vid en metod att simulera tröghetskrafter även under lång tid som består i att simulatorn med omvärld
lutas i sådan vinkel att gravitationskraftens komposant i den önskade kraftriktningen får
önskad storlek 0
Förhållandena härvid framgår tydligast av det exempel som visas i figur l4. Simulatorn har i detta exempel vridits vinkeln cp kring en tväraxei O. försökspersoner uppfattar i
stationärt tillstånd detta läge på samma sätt som om han vore utsatt för en retardation av storleken g a sinçp, där g är tyngdkraftsacr;eierationen, Samtidigt minskar normal" kraften mellan förarens kropp och förarsätet i proportionen cos ;9:1 vilket ej har någon
praktisk betydelse för mindre vinklar., En konstant acceleration går således enkelt att
simulera.
Vid simulering av en med tiden variabel acceleration blir förhållandena ei fullt så enkla
som i fallet med simulering av en konstant acceleration, Om man betraktar en godtyck-lig punkt P på sin-rulatorns "lodlinie" genom vridningspunkten 0 i figur 14 där avståndet
OP=R, blir den simulerade retardationen g - sin cp. + R ° '2,5 och således beroende ei endast av rn utan även av R och 'cp' . För punkter belägna ovanför vridningspunkten räknas R
negativt. Normalkraften mellan förarens kropp och förarsätet påverkas av placeringen
av vridnin s unkten och av c? enliat sambandet m C03 (3 'l' R (3*
t
J
9
.
En viktig fråga i samband med simuiering av med tiden varierande accelerationer är placeringen av vridningspunkten. Såväl kontaktytan mellan föraren och förarstolen som
balanssinnet är viktiga vid förarens bedömning av den acceleration han utsätts för.
Primärt överförs fordonets accelerationer till föraren via förarstolen medan den
accelera-tion som balanssinnet utsätts för påverkas av muskulaturens förmåga att låta huvudet följa
fordonets rörelse samt av huruvida föraren av någon orsak vrider eller lutar huvudet.
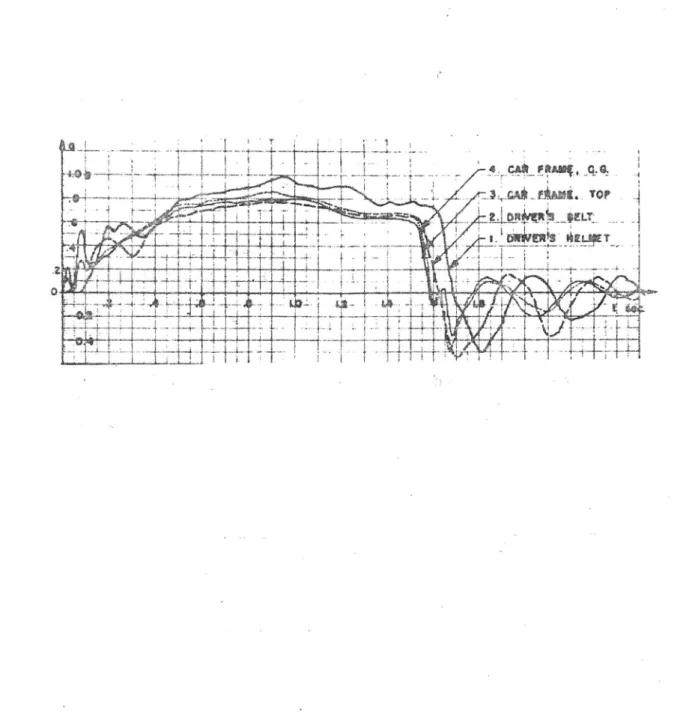
Mätningar utförda vid University of California (Woicik och Hulbert l967) visar också
en tidsfördröining mellan å ena sidan accelerationer uppmätta i fordonet och ett på föraren anbringat bälte och å andra sidan förarens huvud. Accelerationen på huvudet uppträder senare. Resultatet av en sådan mätning visas i fig 35. Låter man vr idnings"
Vridningsçsunåd
S imulatoms Wed! inie" Ver kl ?9
Jedi in ie
F Egur. M. Schemwisk bildav Fardønsföwre 'i simulator som lufczs för simulering av acceåerutionskmfter .
28'.
. .rêwihm _ 4 - __....§;;,mzm:*.. mr . ååmåämi.. .- _. '.'ååfrjâ'zmTw . . m ä' -. L . . . wa
L 1 "3. . .
. .«-.._"... 0-.
Figur 15. Åmaêamñoner uppmätta på: förare: pch fordon (Wøicik och Huiber? 153367 ).
punkten ligga i huvudhöjd eller' däröver och anpassar rörelsen så att accelerationen får rätt storlek i midjehöjd kommer huvudets acceleration att bli fördröjd i förhållande till sätespartiets acceleration. Denna fördröjning torde bli större än i verkligheten men
experimentella data har inte påträffats i litteraturen. Med denna placering av
vrid-punkten kommer accelerationen dessutom hela tiden att vara riktad åt rätt håll i alla delar av försökspersonen., Ett exempel på placering av vridpunkten i huvudhöjd är en av General Motors Corporation byggd bilsimulator som beskrivits av Beinke och Williams (1968). Enligt dessa och reprtage från motorjournalister har god realism erhållits. En närmare beskrivning av denna ges i kapitel 9.
SÄKERHETSSYSTEM
I den genomgångna litteraturen rörande bilsimulatorer saknas redogörelser för
säkerhets-system till simulatorer med accelerationssimulering (moving base). För simulatorer med
kraftiga servosystem är detta emellertid ett väsentligt problem. I litteraturen rörande flygsimulatorer finnes följande system beskrivna.
En av Grumman Aircraft Corp tillverkad simulator har man för att förhindra hårda anslag i rörelsernas ändlägen monterat in elektriska och elektrohydrauliska rörelsebegränsnings-don som nollställer det elektroniska styrsystemet varvid simulatorn långsamt återföres till i neutralläge. Passeras dessa påverkas en säkerhetsventil som slår ifrån hydraultryc ket och slår till bromsar som mjukt stoppar simulatorn s
Dessutom finnes strömbrytare hos pilot, observatör, simulator operatör och dator operatör
som kan oberoende av varandra ingripa om detta motiveras av, säkerhetsskäl. För en annan
flygsimulator anges att man har överströmningsventiler för begränsning av accelerationen
samt spänningsbegränsare i analogdatorn somger en mjuk inbromsning i ändlägena. Om
det elektriska säkerhetssystemet skulle svika stoppas rörelsen i ändlägena av fjäder-buffertar. Hydraultryc ket kan nollställas med en solenoidventil som kan påverkas av pilot och simulatoroperatör samt av spänningsbortfall eller av att en "jerk" mätare registrerar otillåten storlek på accelerationsändningen per tidsenhet.
9.1
30. UPPGIFTER OM BEFlNTLIGA OCH PLANERADE FORDONSSIMULATORER Enkötuppgifter
B. Sheridan vid Massachusetts lnstitute of Technology presenterade 1967 en
samman-stöllning över befintliga och planerade bilsimulatorer i samband med en kongress rörande detta problemområde (Sheridan 1967). Med utgångspunkt från denna giorde J .
Hoskovec och B. Biehl en ny inventering vars resultat publicerades 1970. Fråge-formulören i båda dessa undersökningar ör de samma varför enda skillnaden är att ytterligare några simulatorer beskrivits i den senare.
De personer och företag som lämnat uppgifter i denna form framgår av tabell i i vilken referensnummer till simulatorerna och uppgift om huruvida de var i bruk vid tiden för uppgifternas lömnande (l969)återfinnes .
Frågeformulöret innehöll följande frågor
l För studier av vilka problem är simulatorn konstruerad ?
ll Beskrivning av apparaturen A lnsignaler till föraren
l . visuella a presentationssystem b synfölt (från förarsätet) c färg eller svartvitt d betraktningsavstånd (förare-bildyta) e projektionsavstånd (lins-bildyta)
2. kinetiska (i vilken utströc kning rörlig plattform) 3. ljud
4. övriga
B . Förarens manöverorgan (gaspedal, broms, ratt m m) inverkar de på körningen ? C. Rörelse (verklig och simulerad)
l . dynamiska karakteristika, accelerations- och hastighetsgränser, områden och varierbarhet för parametrar
2. skala (om skalmodeller användes)
3. precision ( hos rörelsen ) ll . Rapport 'flit .
D. Bana
l . tid innan repetition 2. siktsträc ka
3. banvariation (tillbud, hinder, väg)
E. Vilka standardkomponenter användes (inkludera datorer, ljusstrålskrivare,
TV utrustning etc)
F . Kostnad för återuppbyggnad (vid tiden för svaret utvecklingskostnad ej
med-räknad) lll Prestation A . Prestationsmått ( kriterier) l . körprestation 2. fysiologiska mätningar 3 . biuppg ifter 4. övrigt
B . Vilka är de mest signifikanta begränsningarna hos apparaturen C . Metoder för validering mot prestationer vid verklig körning
lV Referenser och administration
A. Litteraturreferenser med beskrivning av simulatorn (inte forskningsresultat)
mera ingående
B. Är simulatorn tillgänglig för utomstönde ? Om ja - på vilka villkor C . Andra forskare inom projektet
D . Källa för finansiering, samband med andra projekt etc
Svaren på de flesta av dessa frågor har i det följande sammanställts i tabellform.
Tabell 2 anger de problem för vars studium simulatorerna är konstruerade. Problemen är
i huvudsak följande .
l . Förarens perception, beslutsfattande manöverförmöga och reservkapacitet i olika tra-fiksituationer och under inverkan av trötthet ,stimulantia eller handikapp av annat
slag VTl . Rapport M. ,,
32. 2.. Utvärdering av fordons käregenskaper
3. Utformning av instrumentering, manöverorgan, belysningsutrustning m m 4. Utformning av vägar och deras omgivning, trafiksignaler', skyltar m m 5 . Förarträning
Tabell 3 visar en sammanställning över använda metoder för visuell
omvärldspresenta-tion.
Tabell 4 visar en sammanställning över använda former av accelerationskraftsimulering. Tabell 5 visar en sammanställning över använda ljudeffekter och övriga effekter.
Tabell 6 visar en sammanställning över använda manöverorgan. Tabell 7 visar en sammanställning över använda modellskalor.
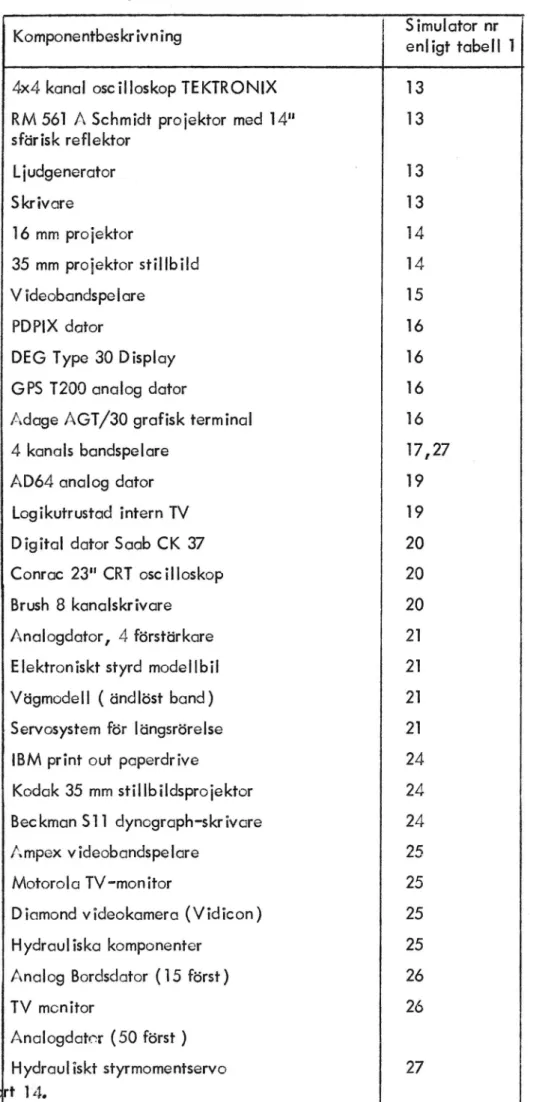
Tabell 8 visar en sammanställning över använda standardkomponenter.
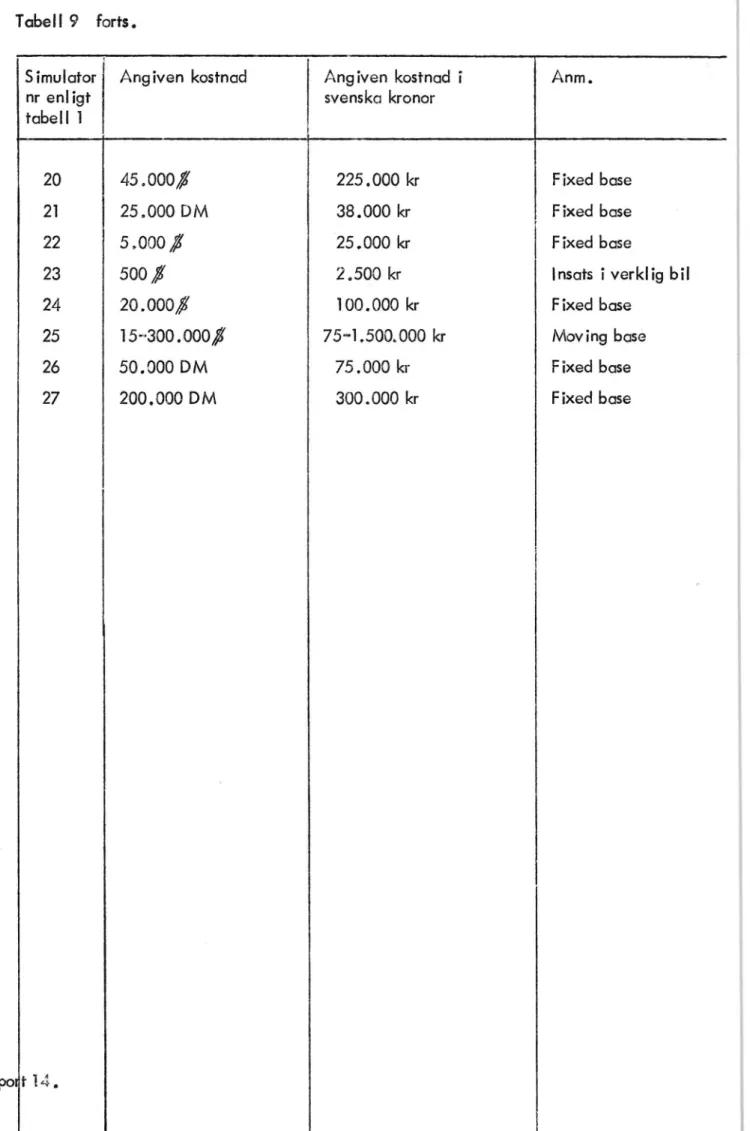
Tabell 9 visar en sammanställning över angiven kostnad för nytillverkning av simulatorer exklusive utvec kl ingskostnader .
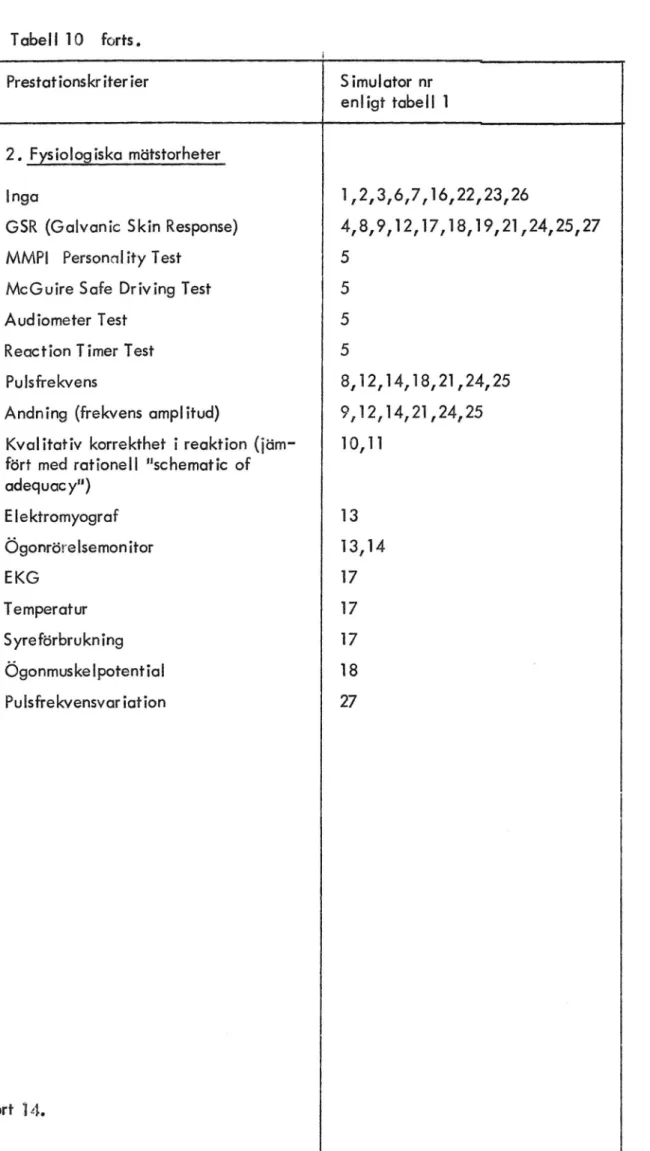
Tabell 10 visar en sammanställning över angivna prestationskriterier vid simulatorprov. Tabell ll visar en sammanställning över angivna mest signifikanta begränsningar hos
bil-5 imulatorerna .
Tabell 12 visar en sammanställning över angivna metoder för validering mot verkliga
vägprov .
Tabell 13 visar en sammanställning över angiven litteratur med utförlig beskrivning av bilsimulatorerna enligt tabell 1 .
I det fäliande återges utförligare beskrivningar av ett antal speciellt intressanta
bil-5imulatorer .
Tabell 1
Lista över simulatorer presenterade i Verkehrspsycholog ie lV, Kuratorium für
Verkehrs-sicherheit, Wien Mai 1970, samt en komplettering.
Simulator Projektledare lnstitution, Adress Anm.
nr Avdelning
l James E. Aaron Southern Illinois Carbondaie l bruk University i 1 I inois 1969
Safety Center USA
2 Chr.v.d. Berg Netherlands NN. Appinge" l bruk Ministry of De- dammer Brons- 1969 tense motorenfabriek
Drivers* Training Farmsumerweg 43
Department A ppl ingedam
Halland
3 Prof.Edward R.F.W. University of Berkeley, Cali- I bruk Crossman California Ber" tornia 1969
keleyr Human 94720 USA
Factors Labo lndustriai Engi" neering and Ope-r rat ions Research
4 G.G. Denton Road Research Crowthorne, l bruk
' l_ .aboratory Ber ks 1 969
(Ministry of England
Transport) Road User Section
Traffic and Safety
Division
5 LRobert Ehrlich Stevens institute Castle Point l bruk of Technology, Station 1969 Davidson Labo- Hoboken,
ratory N.J.O703O
USA
6,7 Robert' E. Fenton Ohio State Uni- 2024 NeilAve., 6. l bruk versity, Depart-W Columbus, Ohio 1969
ment of Electrical 43221 7. Planerad
Engineering USA att tas i
bruk 1969
Tabell 1 forts .
34.
Simulator Projektledare Institution, Adress Anm.
nr Avdelning
8 Sauli Häkkinen Institute of Occu" Haartmaninkatu I bruk pational Health, 1, Helsinki 25 1969 Psychological Finland
Dept.
9 Slade Hulbert, University of 405 Hilgard Ave.. I bruk Charles Woicik California Los Angeles 1969
(UCLA), ITTE, 90024
Engineering USA
10,11, Director Roberth U.S.,Public Health 235 Promenade I bruk 12 McKelvey Service Driving Street Provi- 1969
Research Labora- dence, Rhode
tory Island 02908
USA
13 James R. Knight Cornell Aero- P. O.Box 235, I bruk nautical Labora" Buffalo New 1969 tory, Inc . Dept.. York 14221
of Avionics USA
14 Minoru Kobayashi National Research G,Sambancho, I bruk Institute of Police Chiyodaku, 1969 Science, Traffic Tokyo,
Safety Section Japan 102
15 Dr J.A.Michon Institute for Per- Kampweg 5 l bruk ception RVO-TNO Soesterberg 1969 Road User Beha" Tyskland
viour
16 Prof. G.C o Mass. Institute of 77 Massachusetts I bruk Newton Jr. Technology Electro--Avenue, Cam- 1969 Mark Connelly nic Systems Lab, bridge,
Dept of Elec oEng. Massachusetts 02139
USA
17,18 N .H. Pulling' Liberty Mutual 71 Frankland I bruk Insurance Com- Road Hopkin- 1969
pany ton,
Massachusetts 01748
USA
19 G.H. Robinson University of 1513 Univer'- l bruk Wisconsin, sity Avenue 1969 Industrial Engi* Madison,
Wis-neering consin 53706
USA
Simulator Proiektledare lnstitution, Adress Anm.
nr Avdelning
20 SAAB-SCANIA SAAB-*SCANlA AB S-*58188 l bruk
AB SAAB Simulation Linköping 1969
Center Sverige
21 lng.K-H Technische Univer-r Så'rasse des Planerad att Schrader sitöt Berlin, 17 Juni 135 tas i bruk
Institut für Kraft- 1 Berlin 12 april 1969
fahrzeuge Tyskland
22,23 T.B.Sheridan, Massachusetts' 77 Massachu- l bruk W.R,V Ferrell lnstitute of Techm setts Avenue 1969
nology, Mechani" Cambridge,
cal Eng, Dept. Massachusetts
02139, USA
24 B.W.Stephens U.S. Bureau of 1717 H.st.NW l bruk Public Roads, (FHRS) 1969 Traffic Systems Washington,
Office of Research D ,C a
and Development
25 Dr R.C. Sugarman Cornell Aeronauii" P.O.Box 235, l bruk del-cal Laboratory, Buffalo, New vis 1969
Life Sciences York 14221 Sect .,Avionics
Dept.
26 Dipl.ing. Technische Univer- Strasse des 17 l bruk K.Vorwerk sit'cit Berlin, institut Juni 135 1969
för Kraftfahrzeuge 1 Berlin 12
Tyskland
27 Dipl.ing. ii- - - i bruk
F.Wallner 1969
28 R.E. Beinke, General Motors Warren l bruk J.K. Williams Technical Center Michigan 1969
Advance Product 48090
Engineering USA
0
Tabell 2
3.60
Problem för vars studium simulatorn är konstruerad
Rapport M.
Simulator Problembeskrivning nr
1 Förarreaktioner W visuella och operationelia .
2 Förarträning. Förarbeteende under inverkan av väg, trafik, trötthet, alkohol,
panik.
Manöverförmåga och stabilitet hos förare .
Studier av hastighetsperception, risktagning och beslutsfattande..
Reservkapacitet hos förare för olika fordon och yttre störningar vid konstant
hastighet.
Kökörning i fortfarighet på rak väg.
Kökörning på kurvig väg. Förarmanövrer och automatisk styrning av fordon. Uppmärksamhet, trötthet, effekt av stimulantia, reaktion vid tillbud,
ergonomi.
9 Förarbeteende i olika trafiksituationen trafiksignaler, reducerad sikt, normal
beteende, effekt av stimulantia, ålderseffekter, handikapp, bedömning, beslut, utformning av baklysen på andra bilar, utformning av instrument och
manöverorgan .
lO Uppmärksamhet, trötthet vid långvarig körning, tillbudsperception, reaktion i dynamisk kraft.
ll Reaktion i nödsituation, reaktion vid uppfattning av fara.
12 Förarträning, reaktioner i nödsituationer. l3 Utveckling av dynamiska modeller av bilförare.
14 Uppförande i trafiksituationer, psykologisk värdering av väg och landskap,
förarträn ing . l 5 Percept ionsbes l ut ..
lö Fordonsdynamik inkl. extrema manövrer. Utvärdering av köregenskaper. Prestation hos förare-fordonskombinationer, förarträning speciellt för
nöd-situationer s
17 Förarens perceptionsmotorik, vakenhet,
18 Förarens perceptions- och manöveregenskaper, fysiologiska interaktioner och
försämringar .
19 Förarens visuella och motoriska manöveregenskaper,
20 Förarens manöverförmåga och reaktioner vid plötsligt uppdykande hinder. Zl Egenskaper hos systemet förare fordon longitudinell dynamik).
Tränings-simulator .
22 ' Undvikande av kollisioner och manöver inför förutsedda nödsituationer.
VT
Simulator Problembeskrivning nr
23 Undvikande av kollision vicl verklig bilkörning. 24 Studier av vögskylrning och förvarningsavsrånd. 25 Körning såväl på väg som i terräng .
26 Kökörningsproblem (stabilitet) omkörningsmanövrer.
27 Egenskaper hos sysiemer förare-fordon, speciellt beträffande
tv'drrörelse-Rapport §14.
Sammanställning över systemlösningar för visuell omvärldspresenrarion på utförda och planerade simulatorer Tabell 3 38. _53 n
..93 i??
en 5 E
_i'- s_ > ll 'l'""° :5 F 2
se 33
:ä
Systembeskrivning 5% :GQ 3.6 .V E "ä '5% -ä ...(2 G) '0) m. .U g: .59 C 5_ E .0 .E;ggg
sr_ mess
Oka; 0;:- o-.2 '2:2 ga-E 0--
egg,gnaga-?m.8Å1tnÖ'U 'Ulf-'C375' cc 0) (sö-G!) öm g: 55 6) 5-3.: :z: :5 3 'tag *av-- 0-8' En.. E) I > > am m :4. m så. få å ,9, g. 35 mm film+super pon.d'ia 9 1600 - - - x 2,85 6,9 400
28 90°
x
,42,1
äns-2 90°
l - - -- - x 3-9 10,5-16 mm mm
9 1600 -
- - x
2,85
6,9 40°
14 60° -
- - x
3,4
6-7
--Fast TV projektor, TV kamera på
22 50°
x O,6-0,75
-rörligt modellfordon 27 600 x 1 ,7
-Rörlig TV projektor styrd av föra- 2 500 x 3,5
-rens huvudvridning . TV kamera på
rörlig modellbil . TV kamera rörlig
i förhållande till modellbilend
synkronism med TV projekrorn
Fast TV-monitor med eller utan
kollima'rorlins
a) Bildgenerering med servosryrd H 7-90 350 x l5(Vir'r)
-TV kamera over rallande 25 450 x 1 __
landsvag' eller fas: modell- 0
landskap 26 45 x 0,6
'-b) Datarproducerad bild 400 x 0,7
'-7 40°
x 0,7
-VTl . Rapport .
.5, 'g 1 E :<5 'se
"' 7= ?13 '3
§3 :5
'ä .9
1 A
Systembeskrivning så: f'g 9 4,, 05-32 .5 i:
(D -- *- __Q :0 m *- 0 O "
15-3203- 303 *e
:IH-.§an5-êtâ-öåäe 5-
mama-05:26:22 essän
:19; '85. gå-.g
E-*öctücz* :§2
_s-U'ço
;3:00.81
zzåx°3>äaé :53 :Ex/?<5 <12:-äc5å9.<
c) Bildgenerering från videotope 25 450 x 0,6 med inspelad Film
Osc il loskop med dotorproducercad bild '0) Utan kollimotorlins 3 450 - - - x 0,5
-16 25° -
- -
x 0,6
-b) Med kollimotorlins 13 250 x 1,2-20 50°
x 0,6
-8 60° -
- - (x) x 2,4
12 70° -
- -
x 2,1
Skuggproiektlonssystem
17 60° -
- -
x 2,5 0,75-1
18 50° -
- - (x)x 3,3
1,0
21 90° -
2 -
x 1,0
1,0
Optiskt direktproiektionssystem lO 330 - - - x 1 med "Polocoot Back ProjectionScreen" och kol l imotorl ins . Systemet sidrörligt i förhållande
till i löngsled rörligt landskap
Direkt betraktad rullande londs- 24 200 300 - - (x) x l-3,2
-väg på vilken fordonet
represen-teros av en liuspunkt
VTl . Rapport M.
Tabell 3 forts . 40.
,L 30
°
då
9 2=.
.9 C
-D L. 0- in- _55 0 . . "" 75-' Q3 > 9 :0 (b i: ' Systembesknvmng .E _7;_ -9 'g 2 9 eg "5464) -5 CD - _ °"" . m 0 0 +- - 1;) 'U 3: . .. E I- '-45 4- c 3 i_ (D ..- ._ '-2 +- 1? O.. -Q'4- gñåmñEå .Zoo-á cÖEEt-G)
D U) .-0_ L_ J +-:- U _(3 .U_ E U) s.. -5- __U, ° 4-V! GD L_ O ?1
.E'E 0.E<DE:-.: :: :8§>9 >Cj§2$å
mmI»mm m u_v <Io. <1:me
.. . . o o
Vagbana filmad upprfran under 4 löO - - x x 0,15 4,5 -rörelse projicerad via speglar
på en horisontell skörm O
(6,6x2,l m) och med 45 sidovöggar. Skärmen direkt-betraktas från ena 'änden med till skalan anpassad ögonhöid
l synföltet inproiicerad bild vid 23 - - - x 0, 25 0,75 verklig
verklig bilkörning bil
Tabell 4
Sammanställning över vid bilsimulatorer använd accelerationskraftsimulering
.- . Broms- och Vertikal
E :'53 S'dkmñ drivkraft kraft
Systembeskrivning å få m ...53 52 i_ 33, 45 L_ ,3 f_ 3
-9
å: °>'=e :2=es>'9 :ne :we
Enbart sidkraft l3 ' 3-100 - - -
-17 ja - - -
'-Antal 2
-Enbart broms- och drivkraft 14 ia
21 . Planerad
Antal 2
Enbart vertikalkraft 9 - - - - §2,5cm(l-2Hz)
3 Antal l
Sidkraft samt broms- och drivkraft 7 jag - ia O
-25 *30 345 *22,5 cm
27 Plan. Plan. Plan. Plan..
28 'ja - ia
'-Antal 4
Sidkraft, broms- och dr ivkratt samt 2 - ia - ia ia
vertikalkraft
Antal 1
Sidkraft och vertikalkraft lO - 35 cm - - Dynamic seat
Antal 1
Girrörelse (vertikal rotationsaxel) 13 :1:450 - -
-27 Plan, - -
-Summa ll
Tabell 5
42.
Sammanställning över ljudeffekter och andra effekter använda på bilsimulatorer
E ffektbes kr ivn ing Simulator nr enligt tabell i Liudeffe kter F il me ffekter l
Motorliud 2,4,6,7,8,9,ll,12,l4,l7,l8,21,27,28 14 Transmissionsl iud 2 l Döckliud 2,14,27 3 Bromsliud 2 l Brusliud 4 1 Inga 3,5,13,15,16,l9,22,23,24,25 lO Vindliud 6,7,10 3 Andra ljudeffekter 8 l Bilradio 9 l l-lastighetsberoende m 20 21 26 27 5 "ud I I I I
Andra effekter Liudsignal vid fel 21,27 2
Elektrisk stöt vid fel 27 l
Kollisionsstöt i 2 1 simulatorn Hastighetsm'dtare 6,7,l7,l8,l9 5" Bensinlukt 9 I avgaslukt Luftkonditionering 9 l VTI .. Rapport '54.
Tabell 6
Sammanställning över angivna manöverorgan på bilsimulatorer
Manöverorgan Kraftåterföring Simulator nr enligt tabell 1 Antal
Ratt Fiöderåterföring 3,10,20,21,22 5 Servohyclraul ik 27 l Eiangiven typ av l,6,7,8,9,l2,l3,l4,l6,l7, l5 återföring 18,19, 24, 25, 26 Moment från stilla- H 1 stående hjul Moment från bil- 2 l hjul på rullar Ei öterföring Gaspedal Fiöderåterföring 10,11 ,20 3 Eiangiven typ av 2,6,7,8,9,l2,13,l4,16,l7, 18 återföring 18,19,21,22,24,25,26,27
Bromspeclal Hydraulisk åter- 10,11 2
föring Fiöderöterföring 10,1] ,20 3 E] angiven typ av l,2,4,6,7_,8,9,12,13,l4,lö,l7 20 återföring l8,l9,2l,22,24,25,27,28 Växelspak l,2,6,7,8,lO,l1,12,l3,l4,l7, l4 18,21,22 Spakstyrning 6 ,7,8 3 Normal bil, 23 l mek vöxell . VTl . Rapport M.
Tabe|17
Sammanställning över angivna modellskclor för bilsimulatorer
Modellskcalcz
fåfäng? 1 en'191
1:25- 2,10 1:87 6,11,18,26 1:79 7 1:200 21 1:12 27 1:20 22 1:100 25 1:250 27 VTl . Rapport §23. .Komponentbeskrivning Simulator nrenligt tabell 1
VTl . Rapp
Standardkomponenter
Raytheon Aelna Drivorrainer TV -kamera
TV -proiektor
Servosysrem för överföring mellan kabin och modellbil
Hydraulpump och motor
Lastb ilshyH PDP8 dig italdator AD 32 PB analogdalor HT 2050 oscilloskop D ig ifalvolrmeler Hölremssfans Reversibel räknare Tidreläer
F lerstråleosc il los kop PACE analogdafor
Blender Tongue TV kamera CONRAC videomoni'ror Räknare Pe nns kr iv are TV -ufrus'rn ing Multiplexer Bandspelare Flerkanals Brushskrivare Analog Digilalomvandlare lBM 7094 dig italdator GPL Modell 800 intern TV TR 48 analog dator ort M.
2,26,27
h ääo wwwm m O* O O* .t s \ s \ \l \l \l8,26
* O O N O ' O N O C DVTI . Rapch
Tabell 8 forts .
Komponentbeskrivning Simulator nrenligt tabell i 4x4 kanal oscilloskop TE KTRONlX
RM 561 A Schmidt projektor med 14" sförisk reflektor Ljudgenerator Skrivare lö mm projektor 35 mm projektor stillbild V ideobandspelare PDPlX dator
DEG Type 30 Display
GPS T200 analog dator
Adage AGT/30 grafisk terminal
4 kanals bandspelare AD64 analog dator
Logikutrustad intern TV
Digital dator Saab CK 37 Conrac 23" CRT oscilloskop Brush 8 kanalskrivare
Analogdator, 4 förstärkare Elektroniskt styrd modellbil Vögmodell ( öndlöst band) Servosystem för löngsrörelse
IBM print out paperdrive
Kodak 35 mm stillbildsprojektor
Beckman Sll dynograph-skrivare A mpex videobandspelare
Motorola TV-monitor
Diamond videokamera (Vidicon) Hydrauliska komponenter
Analog Bordsdator (l5 först)
TV monitor
Analogdator (50 först ) Hydraul iskt styrmomentservo
rt 14. 13 13
![Figur 13. Mänskliga perceptionströsklor för möjliga rörelseformer [McConell 1956]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4892211.134111/30.892.119.791.174.701/figur-mänskliga-perceptionströsklor-möjliga-rörelseformer-mcconell.webp)