S TA T E N S V Ä G I N S T I T U T • S T O C K H O L M
The National Road Research Institute, Stockholm, SwedenLätta fordonskombinationers
kördynamik och bromsförmåga
D Y N A M IC D R IV IN G CH A R A C TER ISTIC SA N D B R A K IN G A B IL IT Y O F PA SSE N G E R CARS W IT H CARAVAN T R A IL E R S
A v G Kullberg
,
0 Nordström, G Magnusson och C Formgren
M E D D E L A N D E
93
Lätta fordonskombinationers
kördynamik och bromsförmåga
D Y N A M IC D R IV IN G CH A R A C TER ISTIC SA N D B R A K IN G A B IL IT Y O F P A S S E N G E R CARS W IT H CARAVAN TR A IL E R S
A v G Kullbergs O Nordström
,
G Magnusson och C Formgren
I N N E H Å L L Contents Sida Page FÖ R O R D ... 7 Preface S T U D IE R R Ö R A N D E LÄTTA FO R D O N SK O M B IN A T IO N E R S K Ö R - D Y N A M I K ... 8
Studies of Dynam ic Driving Characteristics of Passenger Cars with Caravan Trailers
R e f e r a t ... 8
Abstract
1. I n le d n in g ... 9
1. Introduction
2. L ä tta fordonskom binationers k ö r d y n a m i k ... 9
2. Dynam ic Driving Characteristics of Passenger Cars with Caravan Trailers
2.1. D e fin itio n e r... 9
2.1. D efinitions
2.2. Stabilitetsundersökningar m ed hjälp av en m atem atisk fordonsm odell 9
2.2. Investigations of D ynam ic Stability by M eans of Mathematical Vehicle Model
2.3. S tabilitetsundersökning vid f ä l t f ö r s ö k ... 18
2.3. Investigations of D ynam ic Stability in Field Tests
2.4. Jäm förelse m ellan teori och p r a k tik ... 21
2.4. Comparison of the Theoretical and Practical Results
2.5. S lu tsa tse r... 22
2.5. Conclusions
A ppendix. M atem atisk modell för analys av dynam isk sta b ilite t hos e tt dragfordon m ed enaxligt släp fo rd o n ... 24
A ppendix. Mathematical Model for A n a lysis of D ynam ic Stability of a Towing Vehicle with Caravan Trailer
1. I n le d n in g ... 24
1. Introduction
2. Yal av m atem atisk fo rd o n sm o d e ll... 24
2. Selection of Mathematical Vehicle Model
3. H ärledning av m a tem atisk f o r d o n s m o d e l l ... 25
3. Deduction of Mathematical Vehicle Model
3.1. A nvända b eteckningar ... 25
3.1. Notations
3.2. R ö r e ls e e k v a tio n e r ... . . . . 27
3.2. Equations of Motion
3.3. D ynam iska h ju lb elastn in g ar. . 29
3.3. D ynam ic Loads on Wheels
3.4. D ä c k k ra fte r... 30
Sida Page 3.5. J ä m v i k t s e k v a t i o n e r ... 32 3.5. Equations of Equilibrium 3.6. D ynam isk s t a b i l i t e t ... 33 3.6. D ynam ic Stability
4. Program för beräkning m ed digital d a t a m a s k i n ... 36
4. Programme for Calculations by M eans of Electronic Digital Computer
5. L itte ra tu rfö rte c k n in g ... 36
5. References
S a m m a n f a ttn in g ... 41
Sum m ary (in Swedish)
Sum m ary (in E n g l i s h ) ... 42
L ist of Figures (in E n g l i s h ) ... 44 S T U D IE R R Ö R A N D E LÄTTA F O R D O N SK O M B IN A T IO N E R S BROMS- FÖRM ÅGA OCH D Y N A M ISK A S T A B IL IT E T V ID BRO M SN IN G . . . 45
Studies of Braking A bility and D ynam ic Stability during Braking of Passenger Cars with Caravan Trailers
R e f e r a t ... 45
Abstract
1. I n le d n in g ... 46
1. Introduction
2. L ä tta fordonskom binationers dynam iska stab ilite t vid brom sning . . . 46
2. D ynam ic Stability during B raking of Passenger Cars with Caravan Trailers
2.1. D e fin itio n e r... 46
2.1. Definitions
2.2. O rsaker till dynam isk in sta b ilite t vid b ro m sn in g ... 46
2.2. Causes of D ynam ic Instability during B raking
2.3. F ä ltfö rsö k ... 49
2.3. Field Tests
3. L ä tta fordonskom binationers b r o m s f ö r m å g a ... 49
3. B raking A bility of Passenger Cars with Caravan Trailers
3.1. D e fin itio n e r... 49
3.1. Definitions
3.2. Olika faktorers inverkan på fordonskom binationers brom sförm åga . 50
3.2. Effects of Various Factors on B raking A bility of Passenger Cars with Caravan Trailers
3.3. K ra v på lä tta fordonskom binationers b ro m s fö rm å g a ... 59
3.3. Requirements for B raking A bility of Passenger Cars with Caravan Trailers
3.4. F ä ltfö rsö k ... 62
3.4. Field Tests
4. Släpfordons b ro m s s y s te m ... 62
4. B raking Systems of Trailers
4.1. K arakterisering av släpfordons b ro m ssy stem ... 62
Sida
Page
4.2. B eskrivning och karakterisering av förekom m ande brom ssystem för lä tta s lä p fo rd o n ... 64
4.2. Description and. Characteristics of B raking Systems Used on Caravan Trailers
4.3. Jäm förelse m ellan p ed a lk ra ftsty rd och re ta rd a tio n ssty rd släpfor- d o n s b r o m s ... 73
4.3. Comparison between Brakes Operated by Brake Pedal Force and Overrun Brakes Fitted on Trailers
4.4. P åsk ju tsk raften s s t o r l e k ... 74
4.4. M agnitude of Pushing Force Exerted by Trailer on Towing Vehicle
A ppendix 1. M atem atiskt underlag för teoretisk analys av lä tta fordons kom binationers b ro m sfö rm å g a ... 75
A ppendix 1. Mathematical Basis for Theoretical A nalysis of B raking A bility of Passenger Cars with Caravan Trailers
A ppendix 2. P åsk ju tsk raften s inverkan p å den dynam iska stab iliteten u n der brom sning hos en lä tt fordonskom bination vid låsning av dragfordonets b a k h j u l ... 84
A ppendix 2. Effect Produced by Pushing Force on D ynam ic Stability during B raking of Passenger Cars with Caravan Trailers in Case of Locking of Rear
Wheels of Towing Vehicle
S a m m a n f a ttn in g ... 89
Sum m ary (in Swedish)
Sum m ary (in E n g l i s h ) ... 91
L ist of figures (in E n g lis h )... 94 M E D D ELA N D EN OCH R A P P O R T E R F R Å N STA TEN S V Ä G IN ST IT U T 96
F ö ro rd
Kungl. M aj:t uppdrog den 19 decem ber 1963 åt statens trafik sä k e rh e tsrå d att i anslutning till u n d ersö k n in g ar rö ra n d e tunga fordonskom binationer, som råd et lå tt i u p p d rag att utfö ra genom beslut den 26 oktober 1962, verkställa u n d e r sö k n in g ar rö ra n d e lätta fordonskom bi n a tio n e r sam t rö ra n d e fordons och fo r donskom binationers längd. Den 11 m ars 1964 överläm nade tra fik sä k e rh etsrå d e t efter sam råd m ed väg- och vattenbygg nad ssty relsen och statens väg in stitu t till Kungl. Maj :t en plan över u n d ersö k n in g ar, vilkas resu ltat skulle b ilda un d erlag för än d rad e bestäm m elser. D enna god kändes av Kungl. Maj :t den 10 a p ril 1964.I planen ingick föreliggande två u n d ersö k n in g ar rö ran d e lätta fordonskom b in atio n ers kö rd y n am ik resp. lätta fo r donskom binationers brom sförm åga och dynam iska stabilitet vid brom sning. A r b etena h a r utförts vid statens
väginsti-tuts m askintekniska avdelning u n d er ledning av ö veringenjör G. K ullberg m ed förste fo rsk n in g sin g en jö rern a O. N ordström , G. M agnusson och G. F o rm gren som närm aste m ed arb etare. De p ra k tisk a pro v en h a r m öjliggjorts ge nom tillm ötesgående från Flygvapnet, som ställt ett flygfält till förfogande. U n d ersö k n in g arn a h a r p u b lice rats i Sta tens O ffentliga U tred n in g ar 1966:41 »Fordonskom binationer». Y äginstitutets föreliggande m eddelande b estår av sä r try c k av b ilagorna G och H u r SOU
1966:41, till vilka fogats re fe ra t och sam m anfattning på svenska och eng elska sam t fig u rfö rteck n in g p å engelska. P å g ru n d av sä rtry c k sfö rfara n d e t b i behålls den n u m rerin g av tex tav sn itt och figurer, som använts i SOU 1966: 41.
Stockholm i ja n u a ri 1967
S tu d ie r rö ra n d e lä tta fo rd o n sk o m b in atio n ers k ö rd y n a m ik
R eferatU tredningen b eh an d lar fö rh ållan d en rö ra n d e lätta ford o n sk o m b in atio n ers k ö r dynam ik. Med lätt fo rdonskom bination avses h ä r en fordon sk o m b in atio n be stående av ett dragfordon, som utgöres av en bil, vars to talv ik t ej överstiger 3,5 ton, sam t ett d ä rtill kop p lat släp fordon, som utgöres av en slä p k ärra, varm ed avses ett ej till påhängsvagn h än fö rlig t släpfordon fö rsett m ed en axel altern ativ t boggi. S tudier utfördes dels m ed hjälp av en m atem atisk fo r donsm odell, dels m ed hjälp av fä ltfö r sök. Den m atem atiska fordonsm odellen användes för att stu d e ra olika fordons- p a ra m e trars in v erk an p å fordonskom - b in atio n en s stabilitet. D ärvid utgicks från en baskom bination bestående av ett d ragfordon m otsvarande en i Sve rige vanlig p erso n b il i viktklassen 1 2 0 0
kg sam t ett släpfordon vägande 850 kg m ed för husvagnar i denna klass ty p isk a data. Med k o n stan th ållan d e av övriga data v a rie rad es hos drag- och släpfordon de p a ra m e trar, vilkas in v erkan studerades. Yid fältförsöken a n vändes två olika dragfordon vägande
2 1 0 0 kg resp. 1 260 kg sam t ett släp
fordon vars vikt v arie rad es m ellan 1 0 0 0
kg och 1 300 kg. F ö r att m öjliggöra en jäm förelse m ellan b e räk n ad e och vid fältförsök funna resu ltat studerades även dessa ford o n sk o m b in atio n er m ed hjälp av den m atem atiska fordonsm o dellen.
A bstract
T his re p o rt deals w ith conditions con cern in g the dynam ic driving c h a ra c te r istics of light vehicle com binations. A light vehicle com bination m eans here a vehicle com bination consisting of a car, the m axim um w eight of w h ic h does not exceed 3500 kg, and a tra ile r w ith one axle or one bogie. Studies w ere carrie d out on one h a n d w ith a m athem atical vehicle m odel, on the o ther w ith field tests. The m athem atical vehicle m odel w as adopted to study the effects of differen t vehicle p aram eters on the dynam ic stability of the vehicle com bi nation. T his study started w ith a vehicle com bination consisting of a passenger car of a size com m on in Sw eden and w eighing about 1 2 0 0 kg, an d a tra ile r
w eighing 850 kg and w ith data ty p ical for a tra ile r of th a t size. The influence of some p aram eters w as studied by vary in g these and keeping all o th er data constant. At the field tests tw o differen t tow ing vehicles w eighing 2 1 0 0
kg and 1260 kg w ere used together w ith a tra ile r, w hose w eight w as v aried betw een 1000 kg and 1300 kg. To m ake possible a com parison betw een calcu lated results and results obtained at field tests those vehicle com binations w ere also stu d ied w ith the m athem atical vehicle model.
B I L A G A G
S tu d ie r rö ran d e lä tta fo rd o n sk o m b in atio n ers k ö rd y n a m ik
1
1. Inledning
De studier, som redovisas i d et följande, avser a t t bringa k larh e t rö ran d e de fak to rer som p åv erk ar fordonskom binatio- nens dynam iska sta b ilitet.
U tredningen o m fa tta r teoretisk analys av elva fordonsparam etrars in v e rk an p å fordonskom binationens d ynam iska sta bilitet. V idare redogöres för sta b ilitets- undersökning vid fältförsök och slutligen för en jäm förelse m ellan re su lta t som er hållits p å teoretisk och p å p ra k tisk väg.
2. Lätta fordonskombinationers kör dynamik
2.1 Definitioner
Med lätt fordonskombination avses h ä r en fordonskom bination bestående av e tt dragfordon, som utgöres av en bil, vars to ta lv ik t ej överstiger 3,5 ton, sam t e tt därtill k o p p lat släpfordon, som utgöres av en släpkärra, varm ed avses e tt ej till påhängsvagn hänförligt släpfordon försett m ed en axel a lte rn a tiv t boggi.
E t t fordon i rörelse är dynam iskt stabilt om en genom en störningskraft initierad svängningsrörelse däm pas u t då stör- ningskraften u pphör a t t verka; i m o t s a tt fall är d et dyn am isk t in stab ilt. Den dynam iska stab iliteten är i de flesta for- donstekniska tilläm pningar hastighets- beroende. S tabiliteten k an öka eller m inska m ed hastigheten beroende p å for
donets uppbyggnad och fram drivnings- sä tt. F ör e tt tv å a x lig t dragfordon m ed släp k ärra gäller enligt v ad som hittills är k ä n t, a tt stab iliteten vanligen m inskar m ed ökande körhastighet.
2.2 S tabilitetsundersökningar m ed hjälp av en m atem atisk fordonsmodell
F ö r a t t u trö n a stab iliteten s hastig h ets- beroende sam t h u r d e tta är avhängigt av olika p a ra m e tra r hos drag- och släp fordon h a r e tt an ta l fordonskom bina tioner stu d era ts m ed hjälp av en av F rederick J in d ra , Southw est R esearch In stitu te , Texas, u p p ställd m atem atisk fordonsm odell (se appendix till denna bi laga). Lösningen av d et m o t modellens rörelseekvationer svarande hom ogena ek vationssystem et ger upplysning om svängningsform er och relativ sta b ilitet. B eräkningarna h a r u tfö rts m ed hjälp av au to m atisk databehandling. Vid ökande k ö rh a stig h et passeras tv å stab ilitets- gränser, vilka huvudsakligen är relate rade till släpfordonets svängningsrörelse resp. dragfordonets sty rk a ra k te ristik .
S tab ilitetsn iv ån för släpfordonets svängningsrörelse, pendlingsdäm pningen, anges av däm pningsförhållandet, varm ed avses förh ållan d et m ellan en m axim al- am p litu d och den n ä rm a st följande å t sam m a håll. N är däm pningsförhållandet är m indre än 1, är kom binationen
1 Av förste forskningsingenjörerna O. N o rd ström och G. Magnusson, staten s vägin- stitu t.
instabil, v arv id svängningsam plituden sålunda ökar m ed tiden. E n lig t am eri kan sk a försök skall dock en fordonskom b in atio n för a tt b e sitta goda köregen- skaper h a e tt däm pningsförhållande av m inst 3, v ilket innebär a tt svängnings am plituden efter tv å svängningar skall h a m in sk at till ca 10 % av utgångsvärdet.
Den till dragfordonets s ty rk a ra k te ri stik relaterade stabilitetsgränsen inne b ä r a tt översty rd a dragfordon från och m ed en viss h astig h e t u p p n å r en sådan grad av ö v ersty rd h et a t t in sta b ilite t in trä d e r (kritisk överstyrning).
Vid stu d iern a h a r som baskom bination a n v ä n ts e tt dragfordon m ed d a ta m o t svarande en i Sverige vanlig personbil v ägande 1 260 kg sam t e tt släpfordon v ägande 850 kg m ed för h u sv ag n ar i d enna klass ty p isk a d ata. Dock h a r för släpfordonet an v än ts en d äck sk arak teristik som ger en högre sidstyvhet, dvs. större sidkraftskoefficient än v ad som är n o rm alt förekom m ande.
Med k o n stan th ållan d e av övriga d a ta varierades i tu r och ordning hos d rag fordonet m assa, d äck sk a rak teristik för fram hjulen, d äck sk arak teristik för b a k hjulen, av stå n d m ellan bakaxel och d rag kula, m assfördelning och m asströghets- m om ent, sam t hos släpfordonet m assa, d äck sk arak teristik , av stån d m ellan drag kula och släpfordonsaxel, kulbelastning sa m t m asströghetsm om ent.
I v a r och en av bifogade figurer G .l— 13 h a r u p p rita ts tv å k u rv o r angivande sam höriga värden p å de varierade for- d o n sp a ram etrarn a och fordonskom bina- tionens hastighet. Den ena k u rv an avser d äm pningsförhållandet 3,0 och den an d ra avser övre hastighetsgräns för icke k ritisk överstyrning. U r dessa diagram k an för en viss fordonskom bination utläsas den högsta läm pliga h astigheten, dvs. den för vilken däm pningsförhållandet 3,0 u p p n ås såvida inte in sta b ilite t p å grund
av dragfordonets överstyrning dessförin nan in trä tt.
I figurerna h a r följande beteckningar använts.
F ör dragfordonet:
A vstån d m ellan ty n g d p u n k tens och fram axelcentrum s
projektioner på längdaxeln / (m) A vstån d m ellan ty n g d p u n k
ten s och bakaxelcentrum s
pro jek tio n er p å längdaxeln b (m) A vstån d m ellan ty n g d p u n k
ten s och dragkulecentrum s
pro jek tio n er på längdaxeln a (m) M assa ... m (kg) M asströghetsm om ent m ed
avseende på en v ertik a l axel
genom ty n g d p u n k te n J z (kgm 2)
Sam m anlagd
sidkraftskoef-ficient för f r a m h ju le n C12 (N /rad) Sam m anlagd
sidkraftskoef-ficient för b a k h ju le n C34 (N /rad)
F ör släpfordonet:
A v stån d m ellan ty n g d p u n k tens och dragkulecentrum s
pro jek tio n er på längdaxeln ae (m) A v stån d m ellan ty n g d p u n k
tens och axelcentrum s p ro
jek tio n er p å längdaxeln . . . be (m) M assa... m e (kg) M asströghetsm om ent m ed
avseende p å en v ertik al axel
genom ty n g d p u n k te n J ez (kgm 2)
Sam m anlagd
sidkraftskoef-ficient för h ju le n ... C56 (N /rad)
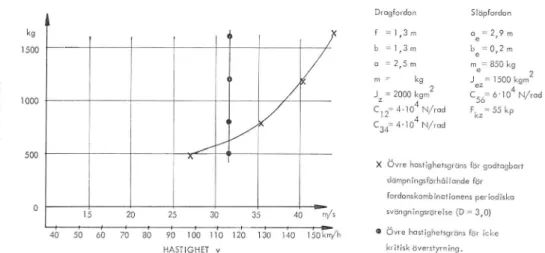
2.2.1 Inverkan av drag fordonets massa
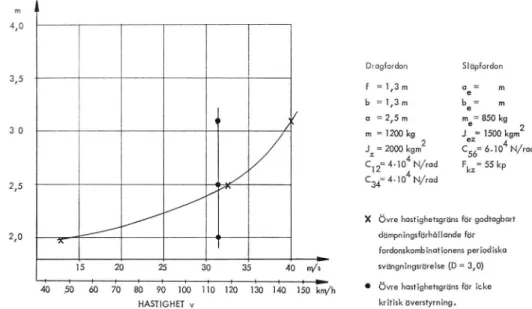
U r figur G .l k an utläsas a t t en ökning av dragfordonets m assa höjer den h astig h et vid vilken gränsen för g o d ta g b a rt däm pningsförhållande passeras. H astig hetsgränsen för ö v ersty rn in g sin stab ilitet för dragfordonet påverkas därem ot inte.
Dragfordon Släpfordon f = 1 ,3 m a = 2 9 m e b = 1 ,3 m b = 0 ,2 m a = 2 ,5 m m ~ kg J - 2000 kgm2 Z A mg = 850 kg J = 1500 kgm2 eZ 4 C = 6-10 N / ra d C 12- 4-10 N / rad F k z = 5 5 kp C 34=4-10 N / ra d X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke kritisk överstyrning.
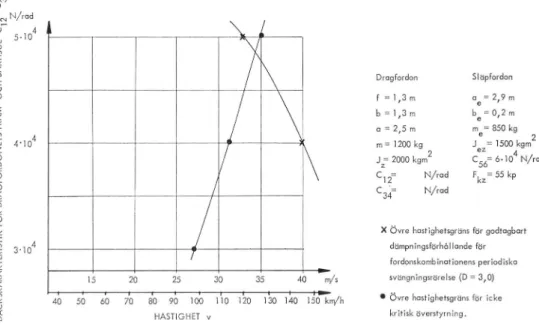
2.2.2 Inverkan av drag fordonets däcks karakteristik
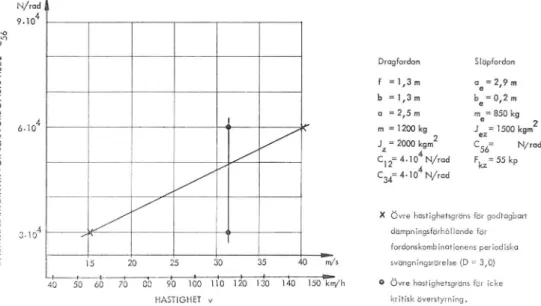
F igur G.2 visar inverkan av olika däcks k a rak teristik för dragfordonets fram hjul m edan fordonsm assa och d äck sk arak teri stik för bakhjulen liksom övriga variabler hålles k o n stan ta. H astighetsgränsen för g o d tag b art däm pningsförhållande höjs vid ökande sidkraftskoefficient hos fram hjulen, m edan därem ot h astig h ets gränsen för icke k ritisk överstyrning sjunker m ed ökande sidkraftskoefficient. Den optim ala sidkraftskoefficienten för fram hjulen, dvs. den sidkraftskoefficient för vilken gränshastigheten för icke k ri tisk överstyrning sam m anfaller m ed den h astig h et vid vilken däm pningsförhål lan d et jD = 3,0, är i d e tta exem pel ca 3,5 • 104 N /ra d vid 4 • 104 N /rad för b a k hjulen. Av figur G. 3 fram går, a tt h astig hetsgränsen för g o d ta g b art däm pnings förhållande sjunker vid ökande sid k rafts koefficient hos dragfordonets b ak h ju l, m edan gränsen för kritisk överstyrning höjs. D et optim ala v ä rd e t på bakhjulens sidkraftskoefficient är ca 4,3 • 104 N /rad vid 4 • 104 N /rad för fram hjulen. I figur G.4 h ar m ed bibehållande av förhållandet
1:1 m ellan den to ta la sidkraftskoeffi cienten för fram - och bakaxel sid kraftskoefficienten för dragfordonets sam tliga hjul v a rierats. D ärav fram går a t t hastighetsgränsen för g o d ta g b a rt däm pningsförhållande sjunker vid ök an de sidkraftskoefficient, m edan h astig h ets gränsen för icke kritisk överstyrning höjs. O ptim al sidkraftskoefficient är ca 4,8 • 104 N /ra d vid sam m a sid k rafts koefficient för sam tliga hjul.
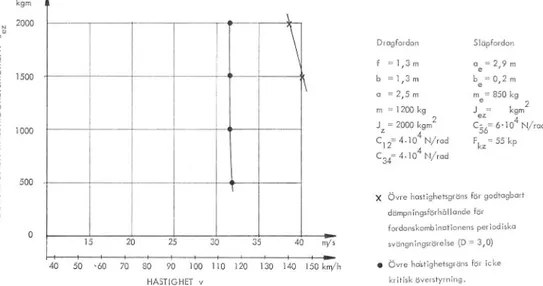
2.2.3 Inverkan av släpfordonets massa
F igur G.5 visar stab iliteten s beroende av släpfordonets m assa. H astighetsgränsen för g o d ta g b a rt däm pningsförhållande sjunker p åta g lig t m ed ökande släpfor- donsm assa, m edan hastighetsgränsen för icke k ritisk överstyrning i h u v u d sak är oberoende av släpfordonets m assa. D e tta gäller vid i övrigt k o n sta n ta förhållanden, dvs. även vid k o n sta n t kulbelastning. I p ra k tik e n torde dock en m assförändring hos släpfordonet vanligen m edföra en förändring av kulbelastningen. In v erk an av kulbelastningen behandlas p å annan p lats.
f = 1 ,3 m b - 1 , 3 m a = 2 ,5 m m = 1200 kg J = 2000 kgm2 C l2 = N / ra d C 34= 4-10 N / r a d a = 2 9 m e b = 0 .2 m e ’ m = 850 kg e 2 J = 1500 kgm ez 4 C = 6-10 N / rad X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke H A S T IG H E T y kritisk överstyrning.
F igur G.2. D ynam iska stabilitetens beroende av däckskarakteristiken för dragfordonets fram hjul
Dragfordon f = 1 ,3 m b = 1 ,3 m a = 2 ,5 m m = 1200 kg J = 2000 kgm2 Släpfordon a = 2 9 m e b = 0 2 m e mg = 850 kg J = 1500 kgm2 ez A C = 6 - 1 04 N / ra d C j 2= 4-10 N / r a d 55 kp N / ra d X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke H A S T IG H E T v kritisk överstyrning.
S L A P F O R D O N E T S MAS SA m D Ä C K S K A R A K T E R lS T lK FÖ R D R A G F O R D O N E T S FRAM - O C H B A K H JU L H A S T IG H E T v Dragfordon Släpfordon f = 1 ,3 m a = 2 9 m e b = 1 ,3 m be = 0 ,2 m a = 2 ,5 m m = 850 kg e 2 m = 1200 kg J = 2000 kgm2 z J = 1500 kgm ez 4 C 56= 6 - 1 0 N / ra d C 12= N / r a d F k z = 5 5 k P C 34= N / ra d X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke kritisk överstyrn in g .
Figur GA. D ynam iska stabilitetens beroende av däckskarakteristiken för drag for donets fram - och bak hjul Dragfordon f = 1 ,3 m b = 1 ,3 m a = 2 ,5 m m = 1 200 kg J = 2000 kgm2 z C 12“ 4 • 10 N / ra d C 34= 4-104 N / ra d Släpfordon a = m e b = m e m = kg 2 J = 1500 k g m ’ ez 4 C = 6 * 1 0 N / ra d Fkz=55kP H A S T IG H E T v
Figur G. 5. D ynam iska stabilitetens beroende av släpfordonets massa
X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för ick e kritisk överstyrn in g .
f = 1, 3 m b = 1 ,3 m a = 2 ,5 m m = 1200 kg J z = 2000 kgm2 C ]2 = 4 . 1 0 4 N / ra d C 34= 4 .1 0 4 N / ra d a = 2 9 m e ' b = 0 .2 m e ' me = 850 kg J ez = 15 0 0 kgm2 ö C 56= N / r a d ’ Fkz=55kp X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) ° Ö v r e hastighetsgräns för icke kritisk överstyrn in g.
Figur G.6. D ynam iska stabilitetens beroende av däckskarakteristiken för släpfordonets hjul
av släpfordonets däcks 2.2.4 Inverkan
karakteristik
Av figur G. 6 fram går a tt h astig h etsg rän
sen för g o d tag b a rt däm pningsförhål lande stiger m a rk a n t m ed ökande sid kraftskoefficient hos släpfordonets hjul. H ä r öppnas sålunda en väg a tt m o tv erk a
den stabilitetsm inskning som en ökning av släpfordonets m assa enligt figur G.5> m edför. H astighetsgränsen för icke kritisk ö verstyrning är enligt figur G. 6 oberoen
de av sidkraftskoefficienten hos släpfor donets hjul. E xem plet ger en optim al sidkraftskoefficient av ca 5 • 104 N /rad. Dragfordon f = m b = m m = 1200 kg J z = 2000 kgm2 C 12= 4 . 1 0 4 N / ra d C 34= 4 • 104 N / ra d Släpfordon a = 2 9 m e ' b = 0 ,2 m e ' m = 850 kg 6 2 J = 1500 kgm e Z 4 C 56= 6-10 N/radi': F kz.= 5 5 k p H A S T IG H E T v X Ö v r e hastighetsgräns för godtagbar.1 däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke kritisk överstyrning.
Dragfordon f = 1 ,3 m b = 1 ,3 m a = 2 ,5 m m = 1200 kg J z = 2000 kgm2 C ]2 = 4-104 N / ra d C 34= 4-1 ° 4 N / ra d Släpfoi don a + b = 3,1 m e e ' b = m e m = 850 kg 6 2 J = 1500 kgm ez . C 56= 6-10 N / ra d FU = kP H A S T IG H E T v
Figur G. 8. D ynamiska stabilitetens beroende av kulbelastningen
X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke kritisk överstyrn in g.
2.2.5 Inverkan av drag fordonets massför delning
I figur G.7 belyses inverkan av dragfor donets tyngd p u n k tsläg e i längdled. Vid o fö rän d rat förhållande m ellan sidkrafts- koefficienten för fram -o ch bakhjul (1 : 1) gäller a tt hastighetsgränsen för godtag b a r t däm pningstörhållande sjunker m ed m inskande av stån d m ellan fram axel
och ty n g d p u n k t, dvs. m ed ökande fram - axelbelastning och m inskande bakaxel- belastning vid k o n sta n t to ta lv ik t. G rän sen för icke k ritisk överstyrning förskjuts m ot högre hastig h eter vid fly ttn in g av ty n g d p u n k ten fram åt i dragfordonet. E n ligt exem plet råd er optim al m assfördel ning n är dragfordonets sta tisk a fram - axelbelastning ä r ca 52 % av dess to ta la Dragfordon f = m b = m a = m m = 1200 kg J z = 2000 kgm2 c 12= 4-1° 4 N / ra d C 34= 4-104 N / ra d Släpfordon a = 2 9 m e b = 0 , 2 m e ' me = 850 kg J = 1500 kgm2 6Z 4 C 56= 6 -10 N / rad F k z = 5 5 kp X Ö v r e hastighetsgräns för godtagbait däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) © Ö v r e hastighetsgräns för ick e kritisk ö v e is ty rn in g . H A S T IG H E T v
f = l , 3 m b = 1 ,3 m a = m m = 1 200 kg J z = 200 0 kgm2 C 12= 4 -104 N / ra d 4 - 104 N / ra d a = 2 9 m e ' b = 0 .2 m e me = 850 kg J = 1500 kgm2 eZ 4 C 56= ö -10 N / rad F k z = 55 kp X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke kritisk ö v erstyrn in g.
Figur G.10. D ynam iska stabilitetens beroende av avståndet mellan dragfordonets bakaxel och dragkula
tyngd. D et bör dock observeras, a tt d äck skarakteristiken h a r m ycket sto rt inflytande på stabiliteten.
2.2.6 Inverkan av kulbelastningens storlek
In v erk an av släpfordonets ty n g d p u n k ts- läge i längdled u ttr y c k t i k ulbelastning visas i figur G.8. H astighetsgränsen för g o d ta g b art däm pningsförhållande höjs vid ökande kulbelastning, m edan h astig hetsgränsen för icke k ritisk överstyrning sjunker. O ptim al kulbelastning är i d e t i figur G.8 illustrerade exem plet ca 40 kp.
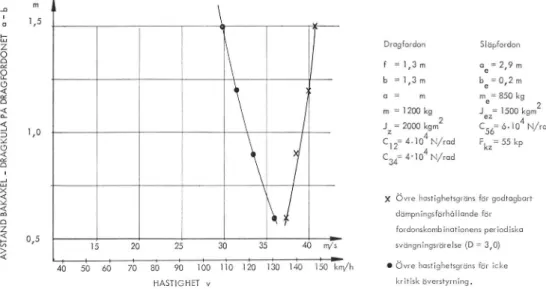
2.2.7 Inverkan av dragfordonets axelav stånd
E n lig t figur G.9 sjunker h astig h etsg rän sen för g o d tag b art däm pningsförhållande m ed ökande ax elav stån d på drag fordonet. K o rta ax elav stån d är dock ogynnsam m a p å grund av a t t k u lb elast ningen ger stor ändring av axelbelast n ingarna i förhållande till det ensam m a dragfordonet, varigenom h astig h etsg rän sen för översty rn in g sin stab ilitet sn ab b t sjunker m ed m inskande axelavstånd. In
verk an av d et till ax elav stån d et rela te rade m asströ g h etsm o m en tet behandlas nedan. I beräkningsexem plet är o p tim alt ax elav stån d ca 3 m.
2.2.8 Inverkan av avståndet mellan drag kula och dragfordonets bakaxel
F igur G.10 visar a t t hastighetsgränsen för g o d tag b art däm pningsförhållande sti ger o betydligt m ed ökande a v stån d m el lan dragkula och bakaxel, m edan has tighetsgränsen för icke k ritisk ö v ersty r ning sjunker. O ptim um ligger i d e tta exem pel vid ca 0,5 m.
2.2.9 Inverkan av avståndet mellan drag kula och släpfordonets axel
H astighetsgränsen för g o d tag b art d äm p ningsförhållande höjs enligt figur G. 11 m a rk a n t m ed ökande av stån d m ellan dragkula och släpfordonsaxel, m edan hastighetsgränsen för icke k ritisk över styrning är oberoende av d e tta . F ö ru t sättn in g en är a tt kulbelastning liksom övriga fordonspai a m etrar hålles kon sta n ta . A v stån d et m ellan dragkula och
Figur G. 14. Dragfordon och släp fordon med utrustning för m ätning av vissa dynam iska förlopp. Dragfordonet är utrustat för registrering av dessa
Figur G.15. Dragfordon och släpfordon med utrustning för m ätning av vissa dynam iska förlopp. Mätdata överföres via släpkabel till följe fordon utrustat för registrering av dessa
Dragfordon f = 1 ,3 m b = 1 ,3 m a = 2 ,5 m m = 1200 kg J z = 200 0 kgm2 C l 2= 4 .1 0 4 N / r a d C 34= 4-104 N / ra d Släpfordon a = m e b = m e me = 850 kg J = 1500 kgm2 ez A C 6= 6 .1 0 N / r a d F k z = 55 kp X Ö v r e hastighetsgräns för godtagbart d äm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för ick e H A S T IG H E T v k ritisk ö verstyrn in g.
Figur G .ll. D ynam iska stabilitetens beroende av avståndet mellan dragkula och släpfordonets axel
släpfordonsaxel är en sto rh et som v a n ligen är sam m ankopplad m ed m assa och m asströghetsm om ent hos släpfordonet, och den sam m anlagda effekten av dessa p a ra m e trar behandlas nedan.
2.2.10 Inverkan av dragfordonets m ass tröghetsmoment
F igur G. 12 visar a t t hastighetsgränsen för g o d tag b art däm pningsförhållande höjs vid ökande m asströghetsm om ent,
Dragfordon f = 1 ,3 m b - 1 , 3 m a = 2 ,5 m m = 1 200 kg 2 J = kgm z 4 C ] 2= 4- 10 K / r a d C 34= 4 - IQ 4 N / ra d Släpfordon a = 2 9 m e ' b = 0 , 2 m e ' me = 850 kg J = 1500 kgm2 ez 4 C 56= 6*10 N / ra d F, = 5 5 kp X Ö v i e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v r e hastighetsgräns för icke H A S T IG H E T V kritisk ö verstyrn in g.
m edan hastighetsgränsen för icke k ritisk överstyrning är oberoende av m asströg- hetsm om entet. D e tta gäller u nder fö ru t sä ttn in g a t t övriga p a ra m e tra r hålles k o n stan ta. I p ra k tik en to rd e m asströg hetsm om ent, m assa och ax elav stån d öka och m inska sam tid ig t varför den sam m anlagda effekten av en förändring hos dessa p a ra m e tra r är av intresse. Om d äck sk arak teristik en för dragfordonet hålles k o n sta n t, kom m er en ökning av m assa och m asströghetsm om ent a t t sam verk a till a t t öka pendlingsdäm pningen, dvs. h ö ja hastighetsgränsen för g odtag b a r t däm pningsförhållande, m edan en sam tidig ökning av ax e lav stå n d et v e r k a r sänkande p å denna. R e su lta te t to rd e dock bli en m ed ökande fordonsstorlek ökande pendlingsdäm p- ning. Om em ellertid, v ilket i p ra k tik e n är fallet, däck sk arak teristik en anpassas till dragfordonets m assa, kom m er d e tta a t t v erk a sänkande p å pendlingsdäm pning en, varför en m ed ökande dragfordons- storlek m inskande pendlingsdäm pning i p rak tik en to rd e v a ra sannolik. E m ellertid m edför en ökning av sidkraftskoefficien- te rn a hos dragfordonets hjul, m ed bibe hållande av dessas inbördes förhållande, liksom en ökning av ax ela v stå n d e t en höjning av hastighetsgränsen för icke k ritisk överstyrning, m edan denna är oberoende av fordonets m assa och m ass tröghetsm om ent. E t t h ö g t v ärd e p å den n a g ränshastighet to rd e u r tra fik sä k e r h etssy n p u n k t v a ra av större betydelse än en hög pendlingsdäm pning, varfö r sto ra dragfordon to ta lt s e tt är fördel aktigare än små.
2.2.11 Inverkan av släp fordonets m ass tröghetsmoment
H astighetsgränsen för g o d tag b art d äm p ningsförhållande sjunker (figur G.13), om än i ringa u tsträc k n in g , m ed ökande m asströghetsm om ent, m edan gränsen för ö v ersty rn in g sin stab ilitet i sto rt se tt är
oberoende av d e tta . M asströghetsm o- m e n te t är dock re la te ra t till släpfordonets m assa sam t till a v stå n d e t m ellan drag ku la och släpfordonsaxel varfö r den sam m anlagda effekten av förän d rin g ar hos dessa p a ra m e tra r skall studeras. I p ra k tik e n ökar och m inskar vanligen m asströghetsm om entet, m assan och av stå n d e t m ellan dragkula och släpfordons axel sam tidigt. Om d ä ck sk arak teristi ken hålles k o n sta n t, sam verkar en ökning av släpfordonets m asströghetsm om ent och m assa till a t t m inska pendlings däm pningen, m edan ökande av stån d m ellan dragkula och släpfordonsaxel ökar pendlingsdäm pningen. Den sam m anlag da effekten to rd e v a ra a t t en ökning av släpfordonets storlek i dessa avseenden m edför en m inskande pendlingsdäm p ning. Om em ellertid d äck sk arak teristik en hos släpfordonet anpassas till dess m assa, to rd e en av släpfordonets storlek tä m li gen oberoende pendlingsdäm pning k u n n a uppnås. H astighetsgränsen för icke k ri tisk överstyrning är oberoende av sam t liga h ä r berörda p aram etrar.
2.3 Stabilitetsundersökning vid fältförsök Vid fältförsöken h a r a n v än ts tv å for donskom binationer m ed från den i den teo retisk a stabilitetsundersökningen an v ä n d a fordonskom binationen avvikande data. Dessa fordonskom binationer h a r av p ra k tisk a orsaker v alts så, a t t instabili- tetsgränsen nås vid så låg h a stig h e t som m öjligt, m edan den i den teo retisk a u n dersökningen an v än d a b askom binatio nen h a r v alts så, a t t den m o tsv arar en i p rak tik en vanligen förekom m ande for donskom bination. De tv å vid fältförsö ken an v ä n d a fordonskom binationerna h a r dock för jäm förelses skull även u n d er k a sta ts teo retisk undersökning m edelst den m atem atisk a fordonsm odellen. R e su lta te t av jäm förelsen redovisas nedan. F ältförsöken utfördes m ed tv å olika
Dragfordon f = 1 ,3 m b = 1 ,3 m a = 2 ,5 m m = 1 200 kg J z = 2000 kgm2 C 2= 4-104 N / ra d C 34= 4-104 N / ra d Släpfordon a = 2 9 m e b = 0 , 2 m e m = 850 kg 8 2 J = kgm 6Z 4 C - 6= 6*10 N / ra d pk z = 5 5 kp X Ö v r e hastighetsgräns för godtagbart däm pningsförhållande för fordonskombinationens periodiska svängningsrörelse (D = 3 ,0 ) • Ö v re hastighetsgräns för icke kritisk överstyrning.
Figur G .l3. D ynam iska stabilitetens beroende av släpfordonets masströghetsmoment
dragfordon, dels m ed en am erikansk stationsvagn vägande 2 100 kg, dels m ed en m indre personbil vägande 1 260 kg. Släpfordonet utgjordes av en stor husvagn, vars v ik t kunde varieras m ellan 1000 och 1300 kg (figurerna G.14 och G.15). Dessa fordonskom binationer’ v a r försedda m ed u tru stn in g för m ätn in g och registrering av e tt an tal sto rh eter som be skriver fordonskom binationens rörelser.
De för undersökningen av svängnings- däm pningen in tre ssa n ta sto rh etern a är förutom färd h astig h eten släpfordonets sidacceleration och vinkeln m ellan drag- och släpfordon. Vid försöken h a r fordons- kom binationen b ringats i svängning an tingen sp o n ta n t p å grund av ojäm nheter i väg b an an , v in d stö ta r eller d y lik t eller m ed hjälp av en k o rtv arig rattm an ö v er. Släpfordonets sidacceleration och
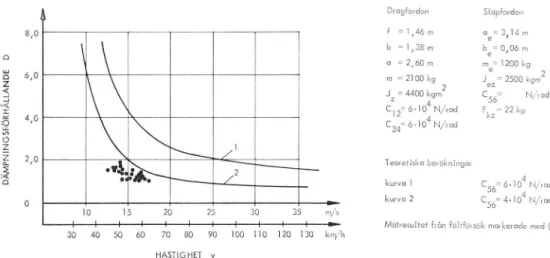
vin-Dragfordon f = 1,46 m b = 1 ,3 8 m a = 2 ,6 0 m m = 2100 kg = 4400 kgm2 C 12= 6-104 N / ia d C 34= 6-104 N / i ad Släpfordon a = 3 19 m e ' b = 0 ,0 1 m e m = 1200 kg e 2 J = 2500 kgm N / ' ° d F k z = 2 k ?
Teoretiska b eiåkn in gar kurva 1
k u iv a 2
C 56= 6-10 N / rad
C - 4-1 O4 N / rad
oo
M a tie s u lta t fi ån föltföisök mai k eiad e med (•
H A S T IG H E T v
Figur G. 16. Jämförelse mellan teoretiska beräkningar och mätresultat vid fältförsök
f - 1 ,4 6 m b = 1,38 m a = 2,60 m m =2100 kg J = 4400 kgm z 4 C ] 2= 6 -l0 N/rad C 34= 6 -104 N/rad Teoretiska beräkningar kurva 1 kurva 2 a = 3 ,1 4 m e ' b = 0 06 m e m^= 1 200 kg J = 2500 kgm2 N/ ' od Fkz=22kp C ^ - 6 - l O N / i ad C 56= 4-10^ N / i ad
Mätresultat från fältföl sök maikerade med (•
H A S T IG H E T v
Figur G .17. Jämförelse mellan teoretiska beräkningar och mätresultat vid fältförsök
keln m ellan drag- och släpfordon h a r därvid reg istrerats i form av tv å k u rv o r med app ro x im ativ sinusform m ed ökan de, k o n sta n t eller m inskande am plitud. Förloppet hos endera av dessa sto rh eter kan användas för a tt b eräk n a sväng ningens däm pningsförhållande, definierad som förhållandet m ellan tv å på v a ra n d ra följande utslag å t sam m a håll. Genom a tt, då fordonskom binationen kom m it i svängning, färdhastigheten u nder inver kan av rullnings- och lu ftm o tstå n d till
lå tits sjunka, h a r däm pningsförhållan- dets hastighetsberoende inom e tt hastig- hetsintervall k u n n a t studeras.
Dessa sålunda funna v ärd en på d äm p ningsförhållandet h a r som fu n k tio n av färdhastigheten inprickats i diagram i fi gurerna G.16—20. F igurerna G .16—18 av ser d et större dragfordonet och figurerna G. 19 och G.20 det m indre. I figurerna G.16— 18 är kulbelastningen 2, 22 resp. 40 kp sam t i figurerna G.19 och G.20 2 resp. 35 kp. Dragfordon f = 1,46' m b . = 1,38 m a = 2,60 m m = 21 00 kg J = 4400 kgm2 z , C 1 2= 6-10 N/rad C = 6-1 O4 N/i ad Släp foid on a = 3 ,10 m o b = 0 ,1 0 m e m = 1250 kg e J - 2500 kgm ez C 56= N / , kz: 40 kp Teoretiska beiåkningar kurva 1 kurva 2 C qA= 6 • 1 0 N/i ad ^ 4
K
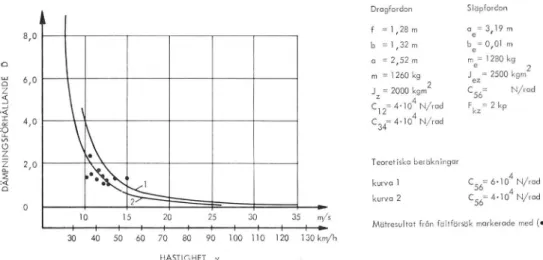
Dragfordon f = 1 ,2 8 m b = 1 ,32 m a = 2 ,5 2 m m = 1 260 kg 2 = 2000 kgm C 12= 4-104 N / ra d C34= 4-1°4 N/ rad T eoretiska beräkningar kurva 1 kurva 2 Släpfordon a = 3 ,1 9 m e b = 0 ,0 1 m e m = 1 280 kg e 2 J = 2500 kgm ez C oo= N / ra d C r = 6-10 N / ra d 56 4 C = 4-10 N / ra d
M ätresu ltat från fältförsök markerade med (• )
H A S T IG H E T v
Figur G.19. Jämförelse mellan teoretiska V idare utfördes vissa prov m ed s. k. färdstabilisator. D enna b estår av tv å i h u v u d sak i kom binationens lä n g d rik t ning m ellan fordonen anbringade stöt- däm pare vars uppgift är a t t däm pa släp fordonets pendlingsrörelse. Dess verkan visade sig v a ra god. E n fordonskom bina tion, som u ta n färd stab ilisato r uppnådde dynam isk in stab ilitet vid ca 90 km /h, kunde m ed färdstabilisator fram föras m ed kom binationens m axim alh astig h et ca 1 2 0 k m /h m ed bibehållen dynam isk
stab ilitet.
beräkningar och mätresultat vid fältförsök 2.4 Jäm förelse m ellan teori och p rak tik
I diagram , se figurerna G.16— 20, h ar för utom de vid fältförsök funna däm pnings- förhållandena även in rita ts b eräknade k u rv o r över sam b an d et m ellan däm p ningsförhållande och färd h astig h et. D es sa k u rv o r h a r erhållits m ed hjälp av den ovann äm n d a m atem atisk a fordonsm o- dellen. I denna modell ingår förutom värden på vissa fordonsdim ensioner även v ärd en på däckskonstanterna. Dessa h a r b estäm ts m ed hjälp av en vid staten s v ä g in stitu t k o n stru erad m ätvagn. Vid
Dragfordon Släpfordor» f = 1 ,28 m a = 3 ,11 m e b = 1 ,32 m bg = 0 ,0 9 m a '= 2 ,5 2 m m = 1 250 kg e
2
m = 1 260 kg J = 2500 kgm ez = 2000 kgm2 C 56” N / ' ° d C 12= 4-1 O4 N / rad F, = 35 kp kz C 34= 4-104 N / .a d Teoretiska beräkningar kurva 1 C c = 6-104 N / rad A kurva 2 C = 4- 10 N / ra d OOM ätresu ltat från fältförsök m arkerade med (• )
H A S T IG H E T v
dessa m ätn in g ar erhölls sidkraften som funktion av avdriftsvinkel och be lastning vid cam bervinkeln noll, dvs. m ed hjulaxeln parallell m ed vägplanet. P å försöksfordonen erhölls vid proven cam bervinklar som gav upphov till sid k ra fte r m o tsa tt rik ta d e de av avdrifts- v in k larn a betingade sidkrafterna. E ffek ten av d e tta är likvärdig m ed en sänkning av däckens sidkraftskoefficienter (däcks k o n stan tern a) m ed avseende p å avdrifts- vinkeln. F ör a t t i någon m ån ta g a h ä n syn till d e tta h a r b eräkningar u tfö rts förutom för det m ed m ätvagnen u p p m ä tta v ä rd e t p å släpfordonshjulens sid k rafts koefficient även för d et m inim ivärde som erhölls vid släpfordonets m axim ala krängning. D enna krängning och m o t svarande cam bervinklar h a r b estäm ts m ed ledning av u p p m ä tt sidacceleration och k rän g n in g sk arak teristik hos släpfor donet.
D å m ätn in g ar rörande ca m b erk rafter nas storlek för de ak tu ella däcken inte h u n n it utföras vid v ä g in stitu te t h a r v ä r den för däck av närliggande dim ension an v än ts. Dessa v ärd en h a r h ä m ta ts från en ty sk avhandling.1
Inv erk an av dragfordonets krängning h a r an setts försum bar.
Om sidkraftskoefficienten v a rit den enda osäkra fak to rn , skulle de vid fä lt försöken erhållna v ärd en a p å d äm p ningsförhållandet h a legat m ellan de tv å k u rv o r som på d e tta s ä tt erhållits i v a rt och e tt av diagram m en i figurerna G.16— 20. D e tta är dock in te fallet, v ilket visar a tt den m a tem atisk a m odellen inne håller förenklingar som m ä rk b a rt p å v e r k a r re su lta tet. E xem pelvis fö ru tsä tte s, a t t däck sk arak teristik en är linjär, m edan den i verkligheten är en b ety d lig t m era
1 P. Koessler och G. Senger: »Vergleichende U ntersuchungen der Seitenfuhrungseigen- schaften von Personenwagen-Reifen»— D eut- sche K raftfahrlforschung und Strassenver- kehrstechnik. H eft 172. Dlisseldorf, 1965.
kom plicerad degressiv funktion. D e tta synes m edföra a tt modellen n ågot över driver d äckskarakteristikens betydelse. Då beräknade värden på däm pningsför h ållan d et b eträffande det tu n g a dragfor donet ligger högre än m otsvarande värden erhållna vid fältförsök och beträffande det lä t t a dragfordonet ligger i övre delen av sp ridningsom rådet för m otsvarande v ä r
den erhållna vid fältförsök, k an vidare be träffan d e teorins giltighet sägas a t t den inte överdriver svårigheterna a tt å sta d kom m a e tt tillräck lig t sto rt däm pnings förhållande för fordonskom binationens pendlingsrörelse. Med an d ra ord är den högsta läm pliga hastig h eten för de i figurerna G .l— 13 b ely sta fordons- ko m binationerna sannolikt lägre än v ad som d är antyds.
2.5 Slutsatser
U tfö rd a analyser och försök visar sålunda a t t en läm pligt dim ensionerad fordons kom bination h a r tillfredsställande d y n a m isk sta b ilite t även vid h a stig h eter över 100 km /h. D et h a r också p ra k tis k t och te o re tisk t v isats a t t m an i ogynnsam m a fall k an erhålla dynam isk in sta b ilite t vid en h a stig h e t understigande 70 km /h. Släpfordonets m assa i relation till drag fordonets är av betydelse, m en av stån d m ellan dragkula och släpfordonsaxel, kul belastning och d äck u tru stn in g sam t drag fordonets beskaffenhet i olika avseenden h ar så stor inverkan p å den dynam iska stab iliteten a t t klassning m ed hänsyn till denna, g rundad p å relativ v ik t, in te kan förordas. P rovkörning för ty p g o d k ä n n an de av olika slag av fordonskom binationer m ed avseende på kördy n am isk a egenska per to rd e v a ra den tills vidare läm pligaste m etoden. G odkännande för olika h astig hetsgränser får m ed hänsyn till svårighe ten a tt ange e tt rä ttv is t klassningssystem anses oläm pligt. I stället to rd e en enda hastighetsgräns, o m fattan d e sam tliga
lä tta fordonskom binationer, v a ra a tt föredra. F ör a t t den skall v a ra tilläm p- b ar för en viss fordonskom bination krävs a t t denna uppfyller vissa fordringar på
dynam isk stab ilitet. Om dessa fordringar ej är uppfyllda, bör sam m a hastighets- bestäm m elser gälla för kom binationen som för dragbil m ed efterfordon.
A P P E N D I X
M a te m a tisk m odell för an aly s av d y n a m isk s ta b ilite t hos e t t
drag fo rd o n m ed en a x lig t släp fordo n
1. Inledning
F ö r analys av den dynam iska stab iliteten hos e tt dragfordon m ed tillk o p p lat en axligt släpfordon krävs en m atem atisk fordonsm odell. I d et följande redogöres för gjorda överväganden vid v alet av denna, för den v ald a m odellen sam t för analysförfarandet.
2. Val av matematisk fordonsmodell
D å den an aly tisk a beskrivningen av tra n sie n t sidorörelse hos verkliga fordon ä r m ycket kom plicerad, är d et i allm än h e t läm pligt a t t införa förenklingar för a t t u n d e rlä tta analysförfarandet. I de arb eten rörande fordonskom binationers dynam iska sta b ilite t som k u n n a t u p p spåras och studeras [1], [2] och [3] före kom m er m atem atisk a fordonsm odeller byggda på olika förenklade antaganden. Dessa antag an d en är i hu v u d sak föl jande:
1. D ragfordonet påverkas ej av släpfordonet. 2. D ragfordonets fram axelcentrum rör sig
längs en förutbestäm d vanligen rätlinjig bana.
3. D ragfordonets fram axelcentrum rör sig i fordonets längdriktning, dvs. fram hjulens sidkraftskoefficient antages oändligt stor. 4. D ragfordonet b etrak tas som en stel kropp
med fixerad ty n g d p u n k t, dvs. den relativa rörelsen mellan hjulen och den fjädrade massan försummas.
5. Släpfordonet b etrak tas som en stel kropp med fixerad tyn g d p u n k t.
6. Sidkraften (S) mellan däck och vägbana antages vara en linjär funktion av
avdrifts-vinkeln ((5) (avdrifts-vinkeln mellan hjulcentrum s färdriktning och hjulplanets skärnings linje m ed vägbaneplanet). S = C • <5 där C antages v ara en linjär funktion av hju l belastningen.
7. A vdriftsvinklarna för hjulen på en axel antages lika stora varigenom dessa h ju l kan b e tra k ta s som e tt hjul placerat i axel centrum .
8. F ram hjulen antages låsta i en bestäm d vinkel.
9. Toe-in, camber- och castervinklar sättes lika med noll.
10. Inverkan av drivkrafter försummas. 11. Inverkan av brom skrafter försumm as. 12. Inverkan av lu ftk rafter försummas. 13. K örhastigheten antages konstant. 14. V ägbanan antages plan och horisontell. 15. Alla vinklar antages så små a tt sinus och
tångens kan sättas lika med vinkeln i radianer och cosinus lika med ett. 16. Kopplingen mellan drag- och släpfordon
antages friktionslös.
17. Däckens deform ation försumm as. 18. G yralkrafter försummas.
19. Däckens återställningsm om entförsum m as. 20. Inverkan av rullningsm otstånd försumm as. Av ovanstående förenklingar to rd e 1., 2. och 3. inn eb ära de k raftig aste av vikelserna från verkliga förhållanden. D ärn äst i betydelse kom m er de a n ta ganden som rör däckens sidkraftsupp- tag an d e förm åga, näm ligen 6., 7., 8., 9., 10. och 11. sam t 4. och 5. som m edför a tt krängningens inverkan p å cam ber v in k lar och sty rv in k lar försum m as. A n tag an d e 12. gör modellen oläm plig för studier av förlopp vid hög h astig h et i synnerhet n ä r det gäller fordon m ed hög luftm otståndskoefficient och stor volym i förhållande till vikten. A ntagande 13. begränsar m odellens an v ä n d b a rh e t vid
analyser av brom snings- resp. accelera- tionsförlopp. A ntagande 14. i kom bina tion m ed an tag an d en a 4. och 5. gör m odel len o an v än d b ar för studier rörande v e rti kalsvängningar, dvs. rörande kom fort och dynam iska axelbelastningar. A n ta gande 15. inskränker m odellens an v än d b a rh e t till a tt o m fatta stabilitetsanalyser för fordonsrörelser m ed liten am plitud. A ntagande 16. omöjliggör studier av h u r en fordonskom binations dynam iska sta b ilitet påverkas av en svängningsdäm pare vid dragkopplingen, s. k. färdstabilisator. A ntagande 17. innebär a t t krängningen och ty n g d p u n k ten s sid- och höj d fö rsk ju t ning i förhållande till h ju lk o n ta k ty to rn a s try c k c e n tra blir m indre än i verkligheten. Vid m å ttlig a sidkrafter to rd e h ä ra v orsa kade fel v a ra obetydliga. A ntagandena 18. och 19. to rd e k u n n a accepteras i de flesta sam m anhang. U n d an tag h ärifrå n är främ st studier rörande kraftöverföringen m ellan r a t t och sty rd a hjul och sväng- ningsfenom en i styrningen. A ntagande 20. to rd e v a ra a n v ä n d b a rt i de flesta till- läm pningar.
F ör a t t få en objektiv bild av de olika förenklingarnas rela tiv a betydelse hade d e t v a rit ö n sk v ärt a tt m ed sam m a d a ta u tfö ra stab ilitetsan aly ser m ed successivt av tag an d e förenklingsgrad. P å grund av den m ycket begränsade undersöknings tid en v a r d e tta ogenom förbart. E n vid staten s v ä g in stitu t u ta rb e ta d m a tem a tisk fordonsm odell, d är de flesta h ä r n äm n d a förenklingarna elim inerats, be döm des ta för lång tid a t t program m era för au to m atisk databehandling. Sam m a sak gällde för en något enklare modell fram lagd av Professor J. R. Ellis vid A dvanced School of A utom obile E ngi neering, Granfield, E ngland [3]. T v å m odeller, en av D. W illiams [2] och en av F. J in d ra [1] v ar tidsm ässigt över komliga.
I den fö rstn ä m n d a analysen fö ru tsattes dragfordonets fram axelcentrum rö ra sig
längs en r ä t linje och däckens sidkrafts- up p tagning beräknas m ed en för generell tilläm pning olämplig m etod. Dessa svag h e te r föreligger inte i Jin d ra s arbete. I övrigt gäller i sto rt se tt sam m a förenklan de a n tag an d en näm ligen, för a t t n äm n a de viktigaste, a t t alla v in k lar antages så sm å a tt sinus och tån g en s k an sä tta s lika m ed vinkeln i rad ia n e r och cosinus lika m ed e tt, a t t fordonen är fria från krängning, a t t höger- och v än sterh ju l b e tra k ta s som e tt i axelcentrum p la cerat h ju l sam t a t t inverkan av cam ber, caster, toe-in, däckens återställningsm o- m e n t och styrningens elasticitet försum m as. A erodynam iska k ra fte r h a r också u te läm n ats och v äg b an an antages plan och horisontell.
D å Jin d ra s m a tem atisk a modell så ledes v a r den m inst förenklade av de tv å och dessutom läm pad för vidare u tv eck ling, valdes denna som u tg å n g sp u n k t för de teo retisk a studierna. Jin d ra s analys gäller dock en tu n g fordonskom bination m ed släpfordon av ty p påhängsvagn och b eh an d lar dessutom inte alla in tre ssa n ta p a ra m e trar. D et v a r därför nöd v än d ig t a t t u tfö ra en egen analys m ed d a ta p as sande för en l ä tt fordonskom bination m ed släpfordon av ty p släpkärra.
I d e t följande återges Jin d ra s m a te m a tisk a h ärledningar m ed vissa tillägg och ändringar. 3
.
Härledning av matematisk fordonsmodell 3.1 Använda beteckningar S tö rsta d ä c k b re d d ... q (m) Diam. för ob elastat däck 2r 0 (m) R adiell däckdeform ationun d er b e lastn in g ... A r (m) K u rv ra d ie ... R (m) F ordonskom binationens
h a s tig h e t... v (m/s) R in g try ck (ö v ertry ck ). . . . p z (N /m 2) F rik tio n sk o e fficien t...
F ör drag fordonet: A v stån d m ellan ty n g d p u n k ten s och främ re h ju l axelcentrum s p rojektioner på län g d a x eln ... / (m) A v stån d m ellan ty n g d
pu n k ten s och b akre h ju l axelcentrum s p ro jek tio n er
p å län g d ax eln ... b (m) A v stån d m ellan ty n g d
p u n k ten s och dragkule centrum s p ro jek tio n er p å
lä n g d a x e ln ... a (m) T y ngdpunktens h ö jd över
v ä g b a n a n ... h (m) S p å r v id d ... 2c (m) M assa... m (kg) E n fra m å t rik tad , p å drag
kulan verkande k ra ft p a ra l
lell m ed x-axeln . . . ... F kx (N) E n å t v ä n ster rik ta d , p å
dragkulan verkande k ra ft
parallell m ed y -a x e ln . . F ky (N)
E n n e d å t rik tad , på drag kulan verkande k ra ft p a
rallell m ed z-axeln . . . . . . F kz (N) S am m anlagd sid k raft vid
fra m h ju le n ... S 12 (N) Sam m anlagd sid k raft vid
b a k h ju le n ... S M (N) B elastning p å v ä n ster fram
h ju l ... P ± (N) B elastning p å höger fram
h ju l ... P 2 (N) B elastning p å v ä n ste r b a k h ju l ... P 3 (N) B elastning p å höger b a k h ju l... P 4 (N) F ra m a x e lb e la stn in g P 12 (N) F ram axelbelastning bero
ende av dragfordonets m
as-s a... P'12 (N) F ram axelbelastning beroen
de av släpfordonets m assa P'[2 (N) B ak ax elb e lastn in g . . . P 3i (N) B akaxelbelastning beroen de av dragfordonets m assa -^34 (N) B akaxelbelastning beroen de av släpfordonets m assa P 34 (N) B elastningsöverflyttning
m ellan fram hjulen p å grund av k rä n g m o m e n t...ZlP12(N) B elastningsöverflyttning
m ellan b akhjulen p å grund
av k rä n g m o m e n t...ZlP34 (N) M asströghetsm om ent m ed avseende p å en v e rtik al axel genom ty n g d p u n k te n J 2 (kgm 2) F ordonets h astig h et i y-axelns rik tn in g ... ij (m/s) Fordonets acceleration i y-
axelns riktning, sidaccele
ratio n ... ij (m /s2) Sidkraftskoefficient för
v ä n ste r fra m h ju l... C1 (N /rad) Sidkraftskoefficient för h ö ger fr a m h ju l... C2 (N /rad) Sidkraftskoefficient för v ä n ste r b a k h ju l... C3 (N /rad) Sidkraftskoefficient för hö ger b a k h ju l... C4 (N /rad) Sam m anlagd sidkraftskoef
ficient för fram h ju len . . . . C12 (N /rad) Sam m anlagd sidkraftskoef
ficient för b a k h ju le n C34 (N /rad) F ram hjulens
styrutslags-v in k e l... /? (rad) A vdriftsvinkel för fordonet d (rad) A vdriftsvinkel för fra m h ju
le n ... (512 (rad) A vdriftsvinkel för b a k h ju
len ... <534 (rad) V inkel m ellan fordonets
längdaxel och den vid tid en
t = 0 råd an d e fä rd rik t
ningen, g irv in k e l...W (rad) G irv in k e lh a stig h e t...(rad/s)
G irvinkelacceleration (rad /s2)
F ör släpfordonet:
A v stån d m ellan ty n g d p u n k ten s och dragkule centrum s pro jek tio n er p å
A vstånd m ellan ty n g d p un k ten s och h julaxelcent rum s projektioner p å län g d axeln ... be (m) T yngdpunktens höjd över v ä g b a n a n ... he (m) S p å r v id d ...2 ce (m) M assa... m e (kg) B elastning på v ä n ster h ju l P
5
(N) B elastning på höger h ju l. . P 6 (N) A x e lb e la stn in g ... P 56 (N) B elastningsöverflyttningm ellan hjulen på grund av
k rä n g m o m e n t... ZlP56(N) Sam m anlagd sid k raft vid
h ju le n ... S56 (N) M asströghetsm om ent m ed avseende på en v ertik al axel genom ty n g d p u n k te n J cz (kgm 2) Sidkraftskoefficient för v ä n ster h ju l... C5 (N /rad) Sidkraftskoefficient för hö ger h j u l ... C6 (N /rad) Sam m anlagd sidkraftskoef
ficient för h ju le n ... C56 (N /rad) A vdriftsvinkel för hjulen ö
56
(rad) Vinkel m ellan släpfordonets och dragfordonets
längdaxlar ...
0
(rad) V inkelhastighet för släpfordonet i förhållande till
d ra g fo rd o n et... @ (rad/s) V inkelacceleration för släp
fordonet i förhållande till
d ra g fo rd o n e t...
0
(rad /s2) K oordinatsystem :E t t i dragfordonet fix t r ä t vinkligt axelsystem m ed origo i ty n g d p u n k ten och x-axeln rik ta d fra m å t i dragfordonets lä n g d rik t ning, y-axeln rik ta d å t vän ster v in k e lrä tt m ot dragfordonets sym m etri- plan och z-axeln rik ta d u p p å t... x y z
3.2 Rörelseekvationer
E t t tv å a x lig t dragfordon m ed enaxligt släpfordon (släpkärra) antages fram fö rt m ed k o n sta n t h a stig h et i en cirkulär b an a p å en horisontell, hå rd y ta . D ragfor donets styrsystem tän k es lå st i e tt för k u rv rad ien av p assat läge. B åde dragfor don och släpfordon b e tra k ta s som stela k ro p p ar m ed fixerade ty n g d p u n k te r, dvs. den relativ a rörelsen m ellan h ju lax larn a och de fjäd rad e m assorna försum m as. K opplingen m ellan fordonen antages v a ra en friktionslös led, som in te m o tv e rk a r vridningsrörelser m ellan dragfordon och släpfordon. L u ftm o tstån d , rullningsm ot- stån d hos hjulen och gyroskopeffekter hos ro teran d e delar försum m as i för enklande syfte. S idkrafter överförda från v ägbanan till däcken b e tra k ta s som de enda y ttre k ra fte r av betydelse som p å v e rk a r fordonet. U töver sid k raftern a i k o n ta k ty ta n på däcken u p p stå r åter- ställningsm om ent, m en dessa är tillräc k lig t sm å för a t t k u n n a försum m as i denna analys.
D et b e tra k ta d e system et visas sche m a tisk t i figur 1. E t t i dragfordonet fix t rä tv in k lig t k oordinatsystem m ed origo i dragfordonets ty n g d p u n k t användes. K oordinatsystem ets x-axel ligger i d rag fordonets längdriktning, och y-axeln är en m ot denna v in k e lrä tt horisontell axel rik ta d å t v änster. B åda ax larn a är rik ta d e längs dragfordonets h u v u d trö g - hetsaxlar. Om dragfordonets m assa är m (kg), är dess ty n g d mg (N). D ragfordonets polära m asströghetsm om ent kring v e rti kalaxeln genom ty n g d p u n k te n , dvs. z-axeln, är J 2 (kgm 2). T y n g d p u n k ten s läge i förhållande till fram - resp. bakaxel anges av av stån d en f (m) resp. b (m). A v stån d et från ty n g d p u n k te n till k o p p lingspunkten är a (m).
De variabler som valts för a tt beskriva dragfordonets rörelse är fordonets av d rift i sidled och fordonets girrörelse. I
Figur 1. Dimens io nsbeteckning ar för lätt for donskomb ination
Figur 2. Dimensionsbeteckningar och kraftplan för lätt fordonskombination
analysen fö ru tsa tte s a tt dragfordonets ty n g d p u n k t rör sig m ed den k o n sta n ta h astig h eten v (m/s) enligt figur 1. F ör sm å värd en på fordonets avdriftsvinkel å (rad) k an hastighetskom ponenten längs x- axeln m ed tillräcklig noggrannhet sä tta s lika m ed fordonets resulterande hastig- h etsv e k to r v. I figur 3 visas fordonskom - b inationens h u v u d d elar m ed alla horison
tella k ra fte r som v erk ar på dragfordon och släpfordon u ts a tta — de positiva rik tn in g a rn a h a r angivits. Med hastigheten i y-ax- elns riktning jj (m/s) och girvinkelhastig- h eten W (rad/s), positiv rik tn in g enligt figur 3, k an dragfordonets rörelseekvatio ner hänförda till d et rörliga k o o rd in at sy stem et erhållas i form av k raft- och m om entj äm viktsekvationer
m (y + v W) = S 12 + *^34 Fjty | /^\
J z ' P = f S i 2+ b S u - a F ky I
d ä r S 12 (N) och S 34 (N) är sum m orna av sid k ra fte rn a vid fram - resp. b ak h ju l, posi
tiv a i sam m a rik tn in g som y-axeln. K raften F ky (N) definierad positiv i y-ax eln s riktning är kopplingskraftens sidkom p o n en t verkande p å a v stå n d e t a bakom dragfordonets ty n g d p u n k t. P u n k t över en sym bol anger som v an lig t differen tiering m ed avseende på tiden. E k v a tio nerna (1) är desam m a som för e tt en sam t fordon så n ä r som p å tillägget av sidkraftskom ponenten F ky
Som variabel för a tt beskriva släp fordonets rörelse användes vinkeln O (rad) m ellan d e tta s och dragfordonets längd rik tn in g ar. Släpfordonets m assa är m e (kg) och J ez (kgm 2) dess polära mass- trö g h etsm o m en t m ed avseende p å en v ertik alax el genom släpfordonets ty n g d punkt,, A v stå n d e t m ellan ty n g d p u n k ten och kopplingspunkten är ae (m) och av stå n d e t m ellan ty n g d p u n k te n och släp fordonets hjulaxel är be (m). Genom a tt u p p ställa villkoren för k ra ft- och m o m e n tjä m v ik t vid fortfarighetstillstånd
kx
m e [y + vW - (a + ae) W - ae &] =
- ^56 ' *3/
ae^kx 0 ^e*^56
D et finnes således fem rörelseekvationer för fordonskom binationen. T vå av jäm - v ik tsek v atio n ern a för släpfordonet k an användas för a t t elim inera kopplings- k ra fte rn a Fkx och F ky som in te är av intresse i d e tta sam m anhang. U r ek v a tio n e rn a (1) och (2) erhålles nu tre rörelseekvationer för sidrörelsen hos en fordonskom bination bestående av drag fordon och enaxligt släpfordon.
(m + m e) (y + vW) me(a + ae)W -— Ulf, de & = S-, n + + S
(3)
vid körning i horisontell k urva, erhålles släpfordonets rörelseekvationer
0 = Fi
(
2)
J e S ' + t i ) "— — aeF ky ■
d ä r S56 (N) är sam m anlagda sid k raftern a från släpfordonets hjul och Ffcx (N )k o p p - lingskraftens x-kom ponent. Av ekva tio n ern a (2) fram går, a t t sidacceleratio nen för släpfordonets ty n g d p u n k t är sam m an satt av den relativ a accelera tionen - ae 0 och den absoluta accelera tionen y + vW - (a + ae) W d är (a + ae) är av stå n d e t m ellan dragfordonets och släpfordonets ty n g d p u n k ter.
E k v a tio n e rn a (1) och (2) innehåller tre o b e k an ta variabler, y och W för drag fordonet och 0 för släpfordonet och tv å
56
m a (y+ vW) + J ZW = = ( f + a ) S 12- ( b - a ) S 34
- m e ae (y + vW) +
+ [ J e s + m e( a e + a) ae] ^ +
+ (Jez+ m ea l ) 0 = - (ae + be) S 56 I dessa ekvationer h a r sm å sto rh eter av an d ra ordningen försum m ats.
F ör a t t lösa d e tta ekvationssystem är d e t n ö dvändigt a t t h a explicita u ttry c k för sid k raftern a S12, S 34 och S 56. D äck- sidkraften är en funktion av hju lets be lastning. D et är därför nöd v än d ig t a tt b eräk n a de v e rtik ala h julbelastningarna.
3.3 D ynam iska hjulbelastningar
I figur 2 visas en sidvy av fordonskom bi nationen stillastående på plan väg. K ra f te rn a P 12 (N) och PM (N) sam t P 56 (N) är n o rm alk rafter från väg b an an på fordons- kom binationens axlar o c h F ^ ( N ) är v e rti k alk raften i kopplingspunkten. F ö r drag fordonet gäller jäm v ik tsek v a tio n ern a
P '2= ---12 f + b P ' — 3 1 — ^ mg mg (4) f+b F ö r släpfordonet gäller ap b e k a n ta kopplingskrafter F kx och F t ^56 — kz : k y ae + b( K ae + b.-m eg