ISSN 0347-6049
V Å l meddelande
592
2
V
1989
LIBELLÅLÅA som jämnhetsmatare
En utvärdering
Staffan Nordmark
Väg-UCI) all/(' Statens väg- och trafikinstitut (VTI) + 581 01 Linköping , [ St]tl!tet Swedish Road and Traffic Research Institute * S-581 01 Linköping Sweden
ISS/V 0347-5049
VHmeddeI nde
i
s
7989
LIBELLA som jämnhetsmätare
En utvärdering
Staffan Nordmark
VTI, Linköping 1989
T' Väg-00/1 Statens väg- och trafikinstitut (VTI) - 587 07 Linköping
N N 0 0 0 0 N H |._ a N H N N N N N N H U wa l -l INNEHÅLLSFÖRTECKNING LIST OF FIGURES REFERAT ABSTRACT SAMMANFATTNING SUMMARY METOD LIBELLA Mätinstrumentet LIBELLA Matematisk modell VÃGPROFILER Verkliga vägprofiler
Tecretiskt genererade vägprofiler
JÃMNHETSMÅTT Jämnhetsmått IRI-värde Jämnhetsmått RMS-värde
UTVÃRDERING
Datorprogram Resultat L = 10 m. LF= 15 m. L = 10 m. LF= 15 m. LFL= 15 m. L = 10 m. LF= 30 m. LFL= 30 m. L = 20 m. LF= 15 m. LFL= 15 m. L = 10 m LF= 30 m. LFL= 30 m. Dålig väg ej med.LIBELLA SOM PROFILOMETER .DISKUSSION OCH SLUTSATSER
REFERENSER VTI MEDDELANDE 592 Sid II III N H m p 12 12 12 14 17 20 23 26 28 30 31
LIST OF FIGURES'
Figure 2.1 Sketch of the LIBELLA supplied Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure / Figure Figure Figure by the manufacturer
Mathematical model of the LIBELLA
Real road profiles: a) RV34 and b) LV636
Theoretically generated road profiles corresponding to
a) Very good rigid pavement
b) Good flexible pavement c) Bad rigid pavement
Quarter Car Model and its equations
of motion
Response of Quarter Car Model for
different Wave Numbers = 1/Wavelength
Corresponding values of different
measu-res of road roughness. L = 10 m. LF=15 m.
Road RV34 and LV636
Corresponding values of different
measu-res of road roughness. L=1O m. LF=15 m.
Theoretically generated roads
Corresponding values of different
measu-res of road roughness. L=1O m. LF=15 m. LFL= 15 m. Road RV34 and LV636
Corresponding values of different
measu-res of road roughness. L=10 m. LF=15 m. LFL= 15 m. Theoretically generated roads
Corresponding values of different
measu-res of road roughness.L=10 m. LF=30 m. LFL=30 m. Road RV34 and LV636
Corresponding values of different
measu-res of road roughness. L=1O m. LF=30 m. LFL= 30 m. Theoretically generated roads
Corresponding values of different
measu-res of road roughness. L=20 m. LF=15 m. LFL= 15 m. Road RV34 and LV636
Corresponding values of different
measu-res of road roughness. L=20 m. LF=15 m. LFL= 15 m. Theoretically generated roads
VTI MEDDELANDE 592 10 11 15 16 18 19 21 22 24 25
Figure 5.9 Corresponding values of different
measu-Figure 601
27
res of road roughness. L=10 m. LF=30 m. LFL= 30 m. Bad road excluded.
Theoretically generated roads
Comparison between the LIBELLA signal 29
( ----=-) and the road profile ( )
for the theoretically generated profiles a) Very good rigid pavement
b) Good flexible pavement 0) Bad rigid pavement
LIBELLA som jämnhetsmätare. En utvärdering
av Staffan Nordmark
Statens väg- och trafikinstitut (VTI) 581 01 Linköping
REFERAT
Syftet med denna studie var att undersöka hur mätinstrumentet
LIBELLA fungerar som profilometer och hur väl det kan mäta och
klassificera vägojämnheter; Denna analys grundas helt på
simu-leringar. En enkel matematisk modell av LIBELLANS verkningssätt
har tagits fram och programmerats i Fortran. Som testvägprofiler
har använts två manuellt avvägda vägsträckor och tre stycken
teoretiskt genererade vägprofiler, vilka svarar mot mycket bra,
bra respektive dålig väg. Som jämnhetsmått har använts det s.k.
IRI-värdet (International Roughness Index) och RMS-värdet (Root
Mean Square). De olika jämnhetsmåtten beräknade på den verkliga vägprofilen och LIBELLANS mätsignal korreleras mot varandra och
standardavvikelsen beräknas.
Det visar sig att man får hög korrelation mellan de olika måtten om profilerna filtreras med ett högpassfilter med
filtervågläng-den 15 m vid RMS-beräkningen. Denna korrelation indikerarar att
LIBELLAN klarar att särskilja vägavsnitt där jämnhetsmåtten
varierar med en faktor två. Om skillnaden i jämnhetsmått bara är i storleksordningen 20-40% blir korrelationen avsevärt lägre.
LIBELLAN ger i allmänhet, men inte alltid, en överskattning av
IRI-värdet beroende på förstärkningen av våglängder runt 5 m.
Resultaten indikerar att denna överskattning kan röra sig om 50% av det verkliga IRI-värdet.
II
An Evaluation of LIBELLA as a Profilometer.
by Staffan Nordmark
Swedish Road and Traffic Research Institute
S-581 01 Linköping, Sweden
ABSTRACT
The purpose of this study was to investigate how an
instrumen-tation system called LIBELLA worked as a profilometer and how
well it can measure and classify road roughness. This analysis
is based completely on simulations. A simple mathematical model
of the LIBELLA has been developed and programmed in Fortran. Two
manually measured road profiles and three theoretically
gene-rated profiles corresponding to very good, good and bad roads
have been used as test roads. As a measure of of road roughness
we have used the so called IRI-value (International Roughness
Index) and the RMS-value (Root Mean Square). The different
roughness measures computed Eon the real road profile and the
LIBELLA signal are correlated against each other and the
stan-dard deviation is computed. The different measures show high
correlation if the profiles are high pass filtered with a
cut-off wavelength of 15 m before the RMS-computations. This
corre-lation indicates that the LIBELLA manages to distinguish between
roads where the roughness measures differ by a factor two. If
the difference in ,roughness measure is only about 20-40% the
correlation will be much lower.
The LIBELLA overestimates in general, but not always, the
IRI-value depending on the amplification of the road profile
wavelengths around 5 m. The results indicate that this
overestimation can become up to 50% of the real IRI-value.
III
LIBELLA som jämnhetsmätare. En utvärdering.
"av Staffan Nordmark
Statens väg- och trafikinstitut (VTI) 581 01 Linköping
SAMMANFATTNING
Syftet med denna studie var att undersöka hur mätinstrumentet
LIBELLA fungerar som profilometer och hur väl det kan mäta och
klassificera vägojämnheter. LIBELLA består i princip av en balk
lagrad i vardera änden på gummihjul. Mitt på balken är monterat
ett mäthjul som är lagrat i en kort svängarm, vars vinkelrörelse
är utsignalen och i viss mening efterliknar den verkliga
vägpro-filen. Instrumentets konstruktion gör att man kan förvänta sig
en viss distortion av vägprofilen i huvudsak bestående av en
förstärkning av våglängder runt 5 m och en bortfiltrering av
långa våglängder. Frågan är huruvida dessa ofullständigheter
påverkar mätresultatet då gängse utvärderingsmetoder används.
Denna analys grundas helt på simuleringar. En enkel matematisk
modell av LIBELLANS verkningssätt har tagits fram och
program-merats i Fortran. Som testvägprofiler har använts två manuellt
avvägda vägsträckor med längden 100 m och tre stycken teoretiskt
genererade vägprofiler med längden 250 m, vilka svarar mot
mycket bra, bra respektive dålig väg. Som jämnhetsmått har
an-vänts det s.k. IRI-värdet (International Roughness Index) och
RMS-värdet (Root Mean Square) vilka kan tagas fram för
godtyck-liga delintervall av vägprofilerna. Vidare kan de olika
vägpro-filerna signalbehandlas med högpassfilter för att få en vettig
IV
korrelation mellan de olika måtten. Både LIBELLAN i sig och
IRI-beräkningen utgör nämligen i sig en form av filtrering av
mät-data. De olika jämnhetsmåtten beräknade på den verkliga
vågpro-filen och LIBELLANS mätsignal korreleras mot varandra och
stan-dardavvikelsen beräknas.
Det visar sig att man får hög korrelation mellan de olika måtten om profilerna filtreras med ett högpassfilter med
filtervågläng-den 15 m vid RMS-beräkningen, även om de individuella
vägsträc-korna väljs så kort som 10 m. Denna korrelation indikerarar att
LIBELLAN klarar att särskilja vägavsnitt där jämnhetsmåtten
varierar med en faktor två. Om skillnaden i jämnhetsmått bara är i storlekSordningen 20-40% blir korrelationen avsevärt lägre.
Mera intressant kan vara att konstatera att LIBELLAN i
allmän-het, men inte alltid, ger en överskattning av IRI-värdet
bero-ende på förstärkningen av våglängder runt 5 m. Resultaten
indi-kerar att denna överskattning kan röra sig om 50% av det
verk-liga IRI-värdet.
Som profilometer är LIBELLAN mera tveksam, åtminstone om.man
förväntar sig en 1-1 överensstämmelse. På grund av dess kon-struktion erhåller man en förstärkning av våglängder runt 5 m,
vilket är lätt att se vid jämförelser mellan den verkliga
sig-nalen och LIBELLANS signal.
Projektet har bekostats av vägverket.
An Evaluation of LIBELLA as a Profilometer.
by Staffan Nordmark
Swedish Road and Traffic Research Institute
8-581 01 Linköping, Sweden
SUMMARY
The purpose of this study was to investigate how an
instrumen-tation system. called LIBELLA worked as a profilometer and how
well it can measure and classify road roughness. LIBELLA
con-sists primarily of a beam with a wheel in each end. A measuring
wheel on a short swing arm is mounted in the middle of that
beam. The angular motion of the swing arm represents the road
profile when the LIBELLA is towed along a road. The intrinsic
properties of the instrument lead to to some distortion of the
road profile and the question is how important those discrepan-cies really are and how they effect the final measuring result.
This analysis is based completely on simulations. A simple
mathematical model of the LIBELLA has been developed and
prog-rammed in Fortran. Two manually measured road profiles of length 100 m and three theoretically generated profiles of length 250 m corresponding to very good, good and bad roads have been used as
test roads. As a measure of of road roughness we have used the
so called IRI-value (International Roughness Index) and the RMS-value (Root Mean Square) which can be computed for arbitrary
intervals of the road profiles. All the profiles can be modified
by high pass filters to obtain a reasonable correlation between
the different measures. In fact both the use of the LIBELLA
it-self as well as the IRI-computation mean in itself a form of
filtering. The different roughness measures computed on the real road profile and the LIBELLA signal are correlated against each
other and the standard deviation is computed. The different
measures show high correlation if the profiles are high pass
VI
filtered with a cut-off wavelength of 15 m before the
HMS-compu-tations even if the intervaLs are chosen as short as 10 m. This
correlation indicates that the LIBELLA manages to distinguish
between roads where the roughness measures differ by a factor
itwo. If the difference in roughness measure is only about 20-40%
the correlation will be much lower.
More interesting may be that the LIBELLA in general, but not
always, overestimates the IRI-value depending on the
amplifi-cation of the road profile wavelengths around 5 m. The results
.indicate that this overestimation can become up to 50% of the
real IRI-value for the normal roads studied here.
The use of the LIBELLA as a profilometer can thus be questioned_
at least if a 1-1 correspondence is expected. Due to its
con-struction an amplification of wavelengths around 5 m occur and
this phenomenon can be easily detected when comparing the real
road profile and the signal from LIBELLA.
This project was sponsored by the Swedish Road Administration.
1 '
METOD
Till förfogande stod två manuellt uppmätta vägprofiler var och
en 100 m lång. Vidare genererades tre vägprofiler med hjälp av
EFT-teknik (Fast Fourier Transform) ur teoretiska ansatser för
profilernas PSD (Power Spectral Density) svarande mot olika
väg-standard. Dessa vägprofiler var cirka 250 m långa. Till
förfo-gande stod alltså fem olika vägprofiler som var och en delades
in i kortare avsnitt.i Den simulerade Libellan fick genomlöpa
samtliga vägprofiler och för varje delsträcka uträknades två
jämnhetsmått dels för vägprofilen i sig och dels för mätsignalen
från Libellans mäthjul. Totalt får man då fyra jämnhetsmått för
varje delsträcka och korrelationskoefficienten mellan dessa mått beräknades för å ena sidan de verkliga vägarna och å andra sidan de teoretiskt beräknade profilerna.
Det bör också påpekas att vid utvärderingen högpassfiltrerades vissa av profilerna för att få meningsfulla mått. Detta gäller
speciellt vid RMS (Root Mean Square) beräkningen då signalen
kan innehålla mycket låga vågtal.
2 LIBELLA
2.1 Mätinstrumentet LIBELLA
LIBELLA består i princip av en balk lagrad i vardera änden på
gummihjul. Mitt på balken är monterat ett mäthjul som är lagrat
i en kort svängarm.(figur 2.1). Svängarmens vinkelrörelse, då
apparaten föres längs en profil, är utsignalen som i viss mening efterliknar den verkliga vägprofilen. Avvikelser härvidlag beror
på att balkens upplagsändar också följer vägprofilen och därför
distorderar utsignalen jämfört med den verkliga vägprofilen. Man
inser exempelvis lätt att om LIBELLAN (med axelavståndet 5 m)
skulle röra sig längs en ren sinusprofil med våglängden 5 m
skulle' mäthjulets utslag bli dubbelt så stort som den verkliga
amplituden. Vidare inser man att LIBELLAN fungerar som ett
passfilter eftersom dess ramlängd är begränsad.
Sammanfatt-ningsvis kan man alltså förvänta sig att LIBELLANS signal
inne-bär en reduktion av våglängder,som är flera gånger ramlängden,
och en förstärkning av våglängder runt ramlängden.
AHL_
Figur 2.1 Måttskiss av LIBELLA från tillverkaren
2.2 Matematisk modell
Vid simuleringen har använts det förenklande antagandet att
kon-taktpunkten mellan hjul och vägbana alltid ligger vertikalt
under hjulaxeln. Detta är rimligt med hänsyn tagen till aktuella
amplituder och våglängder. Med detta antagande kan man också
eliminera hjulen ur modellen eftersom de bara representerar en
parallell translation. Modellen får således utseende enligt
figur 2.2. Beräkningarna i datorprogrammet för LIBELLANs rörelse
går då till på följande sätt
1. Främre ändens koordinater fås ur vägprofilen med interpolation
2. Bakre ändens kordinater beräknas genom skärningen
mellan vägprofilen och en cirkelbåge med radie
lika med LIBELLANs axelavstånd
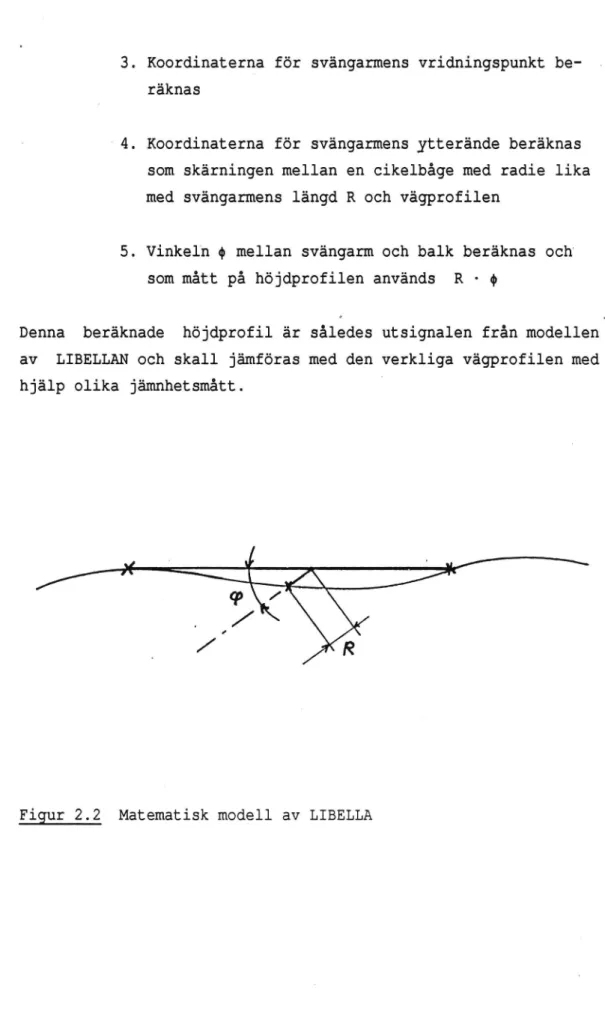
3. Koordinaterna för svängarmens vridningspunkt
be-räknas
»4. Koordinaterna för svängarmens ytterände beräknas
som skärningen mellan en cikelbåge med radie lika med svängarmens längd R och vägprofilen
5. Vinkeln ø mellan svängarm och balk beräknas och
som mått på höjdprofilen används R - @
Denna beräknade höjdprofil är således utsignalen från modellen
av LIBELLAN och skall jämföras med den verkliga vägprofilen med
hjälp olika jämnhetsmått.
'
Figur 2.2 Matematisk modell av LIBELLA
3 VÅGPROFILER
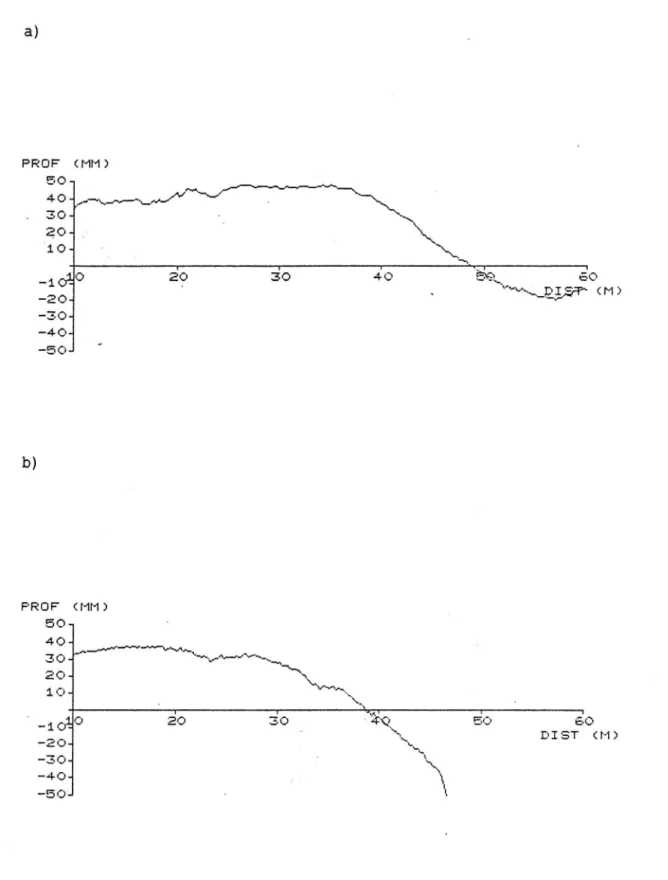
3.1 Verkliga vägprofiler
Två vägsträckor med längden 100 m har manuellt vägts av och
be-nämnes i fortsättningen RV34 och LV636. Avvägningen har gjorts
varje 0.25 m med en viss lågpassfiltrering av vägytan pga den
platta, som finns anbringad på linjalens fot. Uppskattad
nog-grannhet vid avvägningen är il mm. Vägprofilerna finns
redovisa-de i figur 3.1. Det framgår av figuren att båda profilerna inne-håller en komponent med vågtal = 0 dvs medelvärdet skilt från
noll. Vid utvärderingen har profilerna använts både ofiltrerade
och filtrerade med med ett högpassfilter. Detta filter är av typ Butterworth av tredje ordningen och karakteriseras av L = 15, 30 eller 100 m, som är den våglängd vid vilken högpassfiltret
redu-cerar amplituden med 30%. (Se ref. 3). Vägprofilens värde är
alltså angivet varje 0.25 m för en total sträcka av 100 m.
Mellanliggande värden beräknas med linjär interpolation.
P R0 F ( MM ) 50- ; 4_ o __4 .id-why-.be ' _\\ r 30- 4 -\ 20-_- . x\\ 10" 'I \'
_lcgo
-'
äo
,30
40
.?Ek
gryL«.çbE.-W ( M )éo
-20. _30-_.40_ -soa
b)
F'R'OF (MM) 5 O -AMMWWN, 40. 3 O _ M.V-^FFJVN_%MH.\ 20-1 '-3 - a. a. I _ 3 '47 EU bO '_ ir ' n 10' " \ DIST (M) ,--L-:O" A .-5 L [U 0 [J] .4 0 -30- i .'\ -40- ; \ -soaFigur 3.1 Verkliga vägprofiler: a) RV34 och b) LV636
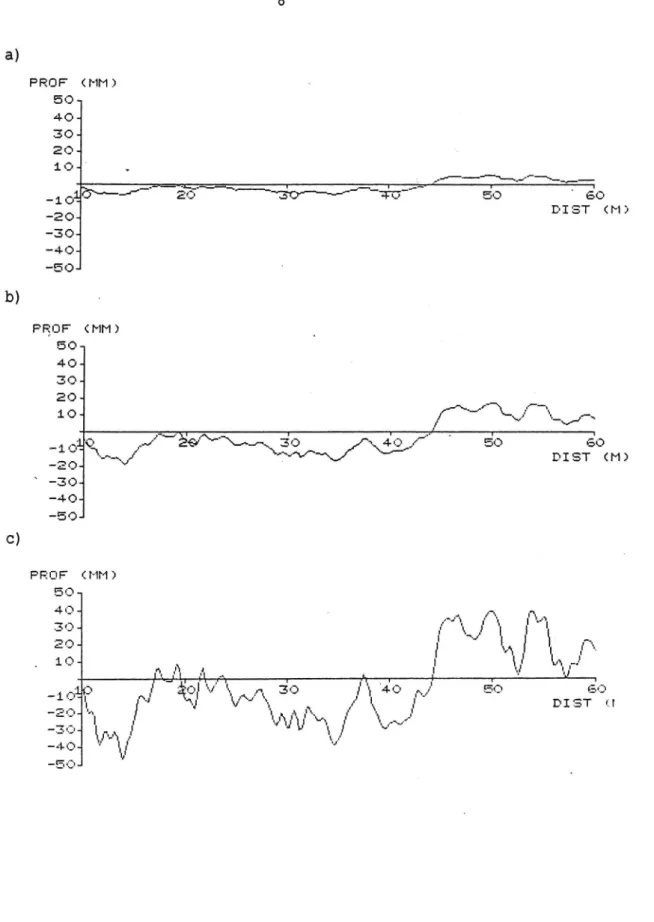
3.2 Teoretiskt genererade vägprofiler
Vid simuleringarna har använts effekttäthetsspektra hämtade ur
(2) där de givits på formen
ohm) = øhmo) [-åT]'W
(3.1)
där
Q = vinkelvågtalet för vägen [dm'l]
oh: effekttätheten för vinkelvâgtalet Q [cm3]
w = exponent beroende på typ aV Väg
I ett log-log-diagram över effekttätheten som funktion av
väg-talet blir ekv (3.1) en rät linje som genom val av no och w an-passas till experimentellt uppmätta värden på effekttätheten° I
denna simulering har använts följande värden
Vägtyp Skick oh(n0) w
Cementbetong Mycket bra 0.6 2.29
Asfaltbetong Bra 6.0 2.18
Cementbetong Dålig 56.3 1.72
Utgående från dessa effektätheter kan alltså vägprofiler
kon-strueras med FFT-teknik. Härvid har använts en steglängd av 0.25
m och för att undvika interaktionsproblem för höga vågtal
(anti-aliasing) har effekttäthetskurvorna skurits med ett brant
låg-passfilter vid vågtalet 1 m'l. Likaså har de låga vågtalen
filt-rerats bort vid profilgenereringen med ett brant högpassfilter
vid vågtalet 0.0125 m'1. Detta innebär att vägprofilerna är
sam-mansatta av sinusfunktioner med våglängder mellan 1 - 80 m. Det
inbördes fasförhållandet mellan de olika sinusfunktionerna är
helt stokastiskt och genereras av en slumptalsgenerator. Detta
är en väl etablerad och ofta använd teknik (ref. 2). De tre
väg-profilerna visas i figur 3.2. Vägprofilens värde är alltså
an-givet varje 0.25 m för en total sträcka av 250 m. Mellanliggande
värden beräknas med linjär interpolation.
8)
PRDF (HM) 50- 4-0- 30-20. 1 O - ' . .. ,.x-_m__-"°-\__,____-1céö *-« _"__åä _ '_' ñáv***v _ ziff_
äb
' äo
__20_ DIbT (M)-sou
_4.0._ _50Jb)
PRDF (MM) ,f' .K_'-\ 1 O _ //\ xxx/o s..-\/__\ Q (3 '0"'H' S ' .NP_ r r _ ,är . I I . *1 ax 29' x» 30 a 40 x 50 50 o- c'vl .. f' "' ao .Max Jxxöfv^ \ " DIST (M) _5_. -30--4 0 .._50J
C)
F'R'C'F' '1 MM ) a) t 1 l r _ _ ' -o _ < -J 'I _ -b IP vs. 'v' 2 4: | hl [i ] I_ -\_ | 0: ) a 1 M af "-_ F / "* -. _ . af ' J . J K 1 .; v-"" ' :I __ .7 ' ... s. _ d* -u r: .-. - h. lvl -4Figur 3.2 Teoretiskt genererade vägprofiler motsvarande
a) Mycket bra cementbetongväg b) Bra asfaltbetongväg
c) Dålig cementbetongväg
4
n
JÄMNHETSMÅTT
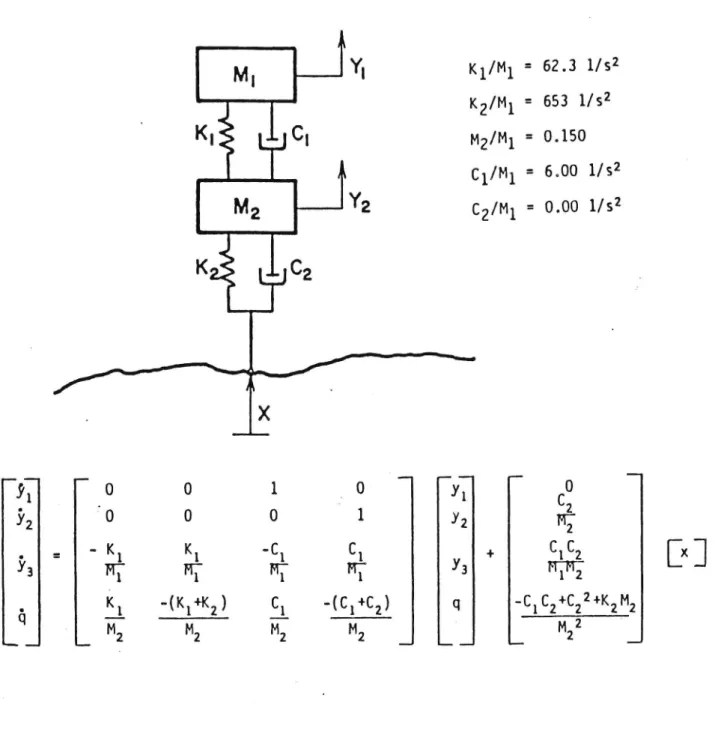
4.1 Jämnhetsmått IRI-värde
Som lämpligt mått har valts det s.k. IRI-värdet. Detta motsvarar
fysikaliskt det ackwmulerade absolutbeloppet av fjädringsarbetet
per genomlöpt längdenhet av profilen för det enkla fordonet i
figur 4.1 nämligen den s.k. Quarter Car Modellen.
n-1
1
IRI = - supZ |g(xi+1) - g(xi)|
L i i=O där i = 0, n är en godtycklig uppdelning av intervallet L = (x0,xn) L = mätsträckans längd
g(x) = y2(x) - y1(x) dvs fjädringsrörelsen enligt figur 4.1
sup = supremum för alla tänkbara uppdelningar av
i intervallet L
IRI-värdet är således variationen av fjädringsrörelsen per till-ryggalagd längdenhet.
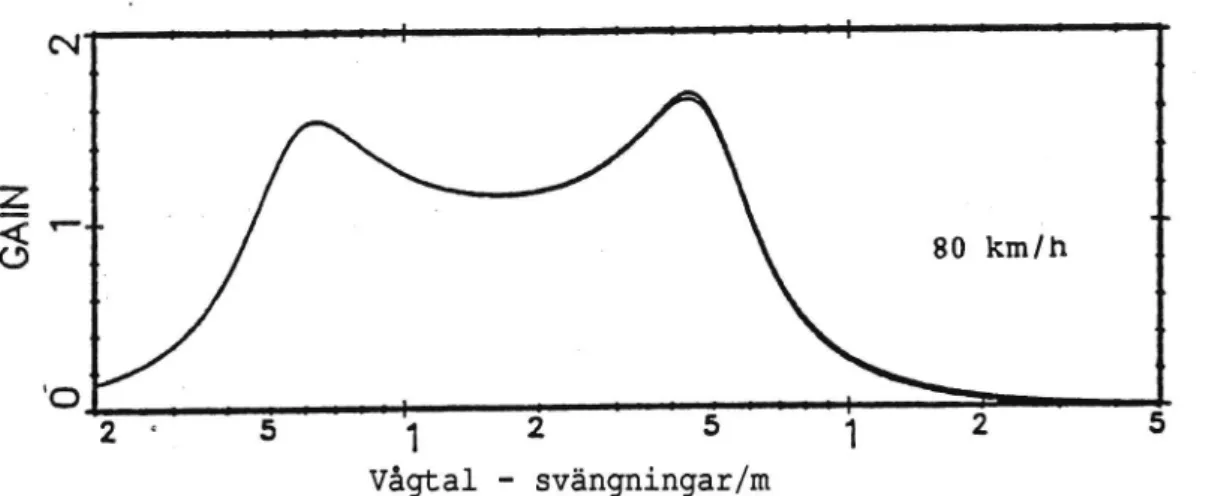
Hastigheten förutsätts vara 80 km/h. Känsligheten hos detta mått för olika våglängder framgår av figur 4.2. Uppenbart är att
ver-kan har samma karaktär som ett bandpassfilter. Mest bidragande
till värdet blir våglängder i intervallet 1.7 - 20. m. En
svå-righet vid utvärderingen av IRI-värden är attvid uppdelningen i
ett antal delintervall kommer IRI-värdet i ett delintervall att
vara beroende av begynnelsevärdet av fjädringsrörelsen vid
in-tervallets början. Dessa begynnelsevärden beror ju förstås på
vad som har hänt i de tidigare intervallen. Man bör således
sträva efter att titta på så långa provsträckor som möjligt för
10
att minimera denna inverkan av begynnelsetillståndet men då får man å andra sidan mycket få mätpunkter. Detta kan vara en
svå-righet med speciellt de verkliga vägprofilerna som har vissa
kraftiga isolerade guppr som vid olyckligt val av delintervall,
kan ha kraftig inverkan på IRI-värdet i nästa delintervall.
- 2
-
.l -
Kz/M1 = 653 l/s2
K.
'TJCl
Mz/M1 = 0.150
i i i = 1/52Y
_
2
_. 0
O
1
' 0
_T
_Sçi
E_
C0
_7
0
0
yz
MZ*
- K K -C C C C 1 l 1 + 1 2 XM?
"I
I
"I"
3
W:
l: 1
' 2 Kl '(K1+K2) .EL '(C1+C2) q 'C1C2+Cå +K2N2 L_ M2 M2 M2 M2 _J L_ _ M2 ...4Figur 4.1 Quarter Car Model och dess rörelseekvationer
ll
2a
5
:1
2'
'
5
'1
2
:
Vågtal - svängningar/m
Figur 4.2 Respons hos Quarter Car Modellen för olika Vågtal=
=1/våglängden. Från ref. 1
4.2 Jämnhetsmått RMS-värde
Detta mått är det vanliga som definieras med kvadratroten ur det kvadratiska medelvärdet av profilen.
1 RMS = - (f(x) - ?Vax L L där 1
'f = -
f(x)dx
L L L = mätsträckans längd f(X) = vertikala vägprofilenDet har tidigare påpekats att de verkliga profilerna RV34 och
LV636 måste högpassfiltreras för att inte dessa RMS-vården helt
skall domineras av de långa våglängderna. Vi har tidigare
kon-staterat att LIBELLANs mätsignal redan är filtrerad beroende på
balkens ändliga längd och IRI-utvärderingen innebar ju i sig en
sådan filtrering. Det är rimligt att försöka hitta korrelationer mellan de olika måtten i ungefär motsvarande våglängdsintervall.
12
5 UTVÅRDERING
5.1 Datorprogram
Ett datorprogram har skrivits som interaktivt kan läsa in valfri
vägprofil (två verkliga vägar och tre teoretiskt genererade)°
Denna profil genomlöps av LIBELLA-modellen och mätsignalen från
mäthjulet sparas såsom Libella-profilen. För båda dessa profiler
beräknas IRI-värden för en lämplig uppsättning delsträckor som
väljes av operatören. Vid RMS-beräkningen måste åtminstone de
verkliga vägprofilerna högpassfiltreras och vi har valt att i
huvudsak arbeta med våglängder kortare än 15 respektive 30 m;
Efter att ha valt delsträckelängd beräknas alla jämnhetsmått för:
alla delsträckor och lagras. Därefter bestäms
korrelationskoef-ficienter och deras standardavvikelser för alla möjliga
kombina-tioner av jämnhetsmått (IRI, IRIL, RMS och RMSL, där L står för
mått på Libella-profilen) och värden svarande mot samma
del-sträcka ritas in som punkter i diagram. I dessa diagram har som
hjälp vid tolkningen ritats in linjen y=x, vilket bara i fallen
IRI-IRIL och RMS-RMSL ger anledning att förvänta sig en
gruppe-ring runt denna linje. I övriga fall är det bara en slump om
storheterna skulle vara av samma storleksordning medan det
fort-farande finns möjlighet till linjära samband som uttrycks genom
korrelationskoefficienten.
5.2 Resultat
Ett stort antal utvärderingar har gjorts med olika
delsträcke-längder och filtreringar. Vi har valt att redovisa enbart ett
urval därav eftersom resultaten är likartade om inget annat
spe-ciellt anges. Vidare har vi hållit isär de manuellt uppmätta
vägprofilerna och de teoretiskt genererade. Redovisningen består dels av korrelationskoefficienter p mellan storheter med motsva-rande standardavvikelse 0 och dels diagram där samhömotsva-rande värden ritats in. För att korrelationen skall äga signifikans bör
13 IV
|P|
0-5
samt N .5 Q|P|
Detta är normalt alltid uppfyllt vid de här utvärderingarna och
punktskarorna i diagrammen kan tjäna som stöd vid tolkningen av
de uppnådda korrelationskoefficienterna.
I fortsättningen används följande förkortningar för att få ett
någorlunda kompakt skrivsätt:
L = Delsträckans längd vid uppdelning av
vägprofilens längd
LF = 15, 30 m. Den våglängd vid vilket filtret
reducerar amplituden med 30% vid högpass-filtreringen av vägprofilen. Används enbart vid RMS-beräkningen
LFL= 15, 30 m. Den våglängd vid vilket filtret
reducerar amplituden med 30% vid högpass-filtreringen av LIBELLANs signal. Används enbart vid RMSL-beräkningen
Om LF och LFL ej är speciellt angivna förutsätts att signalen är
ofiltrerad i det speciella fallet.
14
5.2.1
L=10mQLF=15m
Väg RV34 och LV636
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0;963 0.018 IRI-RMS 0.954 0.023 IRI-RMSL 0.705 0.126 RMs-RMSL 0.637 0.149
Teoretiskt genererade vägprofiler
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0.944 0.013 IRI-RMS 00933 0.016 IRI-RMSL 00903 0.022 RMS-RMSL 0.964 ' 0.009
Man kan observera att korrelationen melllan variablerna är hög
utom i fallet verklig väg och variabeln RMSL. Orsaken till detta
är att LIBELLANs signal ej högpassfiltrerats före
RMS-beräk-ningen. Fasvridningar och olika amplitudinnehåll får anses vara
konsekvens° Filtrering av båda signalerna vid RMS-beräkningen
ger betydligt högre korrelation, vilket framgår av det följande (avsnitt 5.2.2).
IRIL I F'I 15 (MM/'M ) A FHSL_ ( M M ) 2 'l/ 2 < .I .1 f/ / _ /K 1 8 4 1/ 1 :3 . / ./ 1,/ 1 E' '* l.f/"/ 1 '5 1 4 - / 1 4
-12-
////
12-
//
10- // 10. I/ 8 . / 7:7- - // /, / H / .. I, »5 -n 5. -< .-I// i. 4 " /l - // x -/ 2 * x i .3 . :< ,. ' I 'lf l, _/ .I/ ,/ ä 4 å så: 1 o 1 2 1 4 1 e 1 B 20 2 4 5 a 1'0 1'4 1% 18 230 I FZI ( MM/ M ) HMS ( mm 2, " MM/M ) I FSI ( MM/M ) s / 2 ' .. U '1 I/ / / 1 8 _ 1 '9 W 1 :2. - l '5 4 . ' I / 1 4 - ./ 1 4 /'/ f/ I ,.. 1 2 « 4,// 1 .0 . /1/ I/ _I/ ;L ' -w .I/ 'D "' ,r/ ' j" //' ..-'/ ,_., l/ :3 - ,x D - / .x' / v/ / .r i_ I' .- _ " .i 5:. -1 fw .// ,. //l [3]/ 4 " //K 4 _ // A / , .»-/x/ :a // X X " v . R L_ < yxa. / / / ,./ .-1 så. 1'0 11-2 14 1:5 15 20 4 5 :3 :LU 1: 14 15 13 20 F: MS L C MM 3' RHS ( MM )Samhörande värden mellan olika jämnhetsmått. Figur 5.1
L = 10 m. LF= 15 m. Väg RV34 och LV636
16 IRIL (MM/m) A RMSL (MM) '_EOW / ._EO- / >< /'/ F. . / i 1 9 ' x 1 O 4 /// /// 16- x // 1 * > / ê// > // // 1 4 - 1 4 ' ,v /// .7 3.: /
12.
///
12.
K.
_/
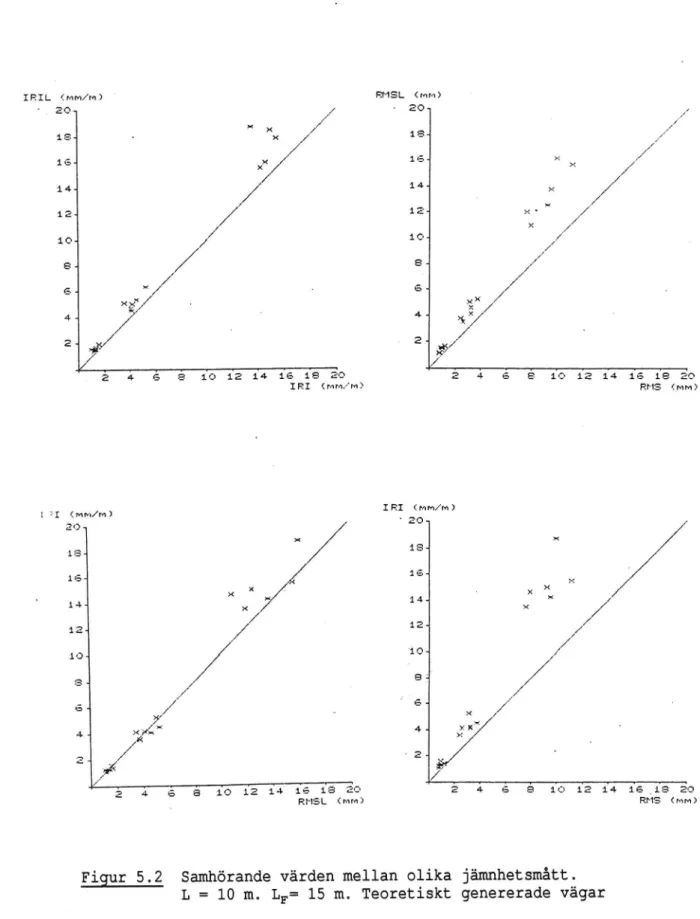
// X 'l/'/ . - 1 O J / 1 O / /z' / / 8 - - 8 _ /,I /l / E -1 // ED " .3 X / xâ/ 'i / 4.1 / 4 .1 X/ // j/ 2 d 2 "' l/ å' 110 1:25 14 1 6 1 8 20 då 170 :(2 3:4 3:5 1'8 §0 IRI (MM/M) RHS ,mmä ,TI (MM/M) IRI (MM/M) 20 i 20 ' / -1 :3 . 1 8 ' / 1 i: - 'K \ l X x ;7// 14 X >: " I 1 4 - x I \ / / / q ' 1:1 .: -.:// // / // 1 0 d /2 l_\ l/ .3 a I/ I,/1 __ / D // /å 4_ _ >< ;KH ' /á ll/ /' i: så -á 1'0 12 54 133 18 :§0RMSL (MM) 10 12 14 :[6 _1'8 áoRMS (MM)Figur 5.2 Samhörande värden mellan olika jämnhetsmått.
* L = 10 m. LF= 15 m. Teoretiskt genererade vägar
17
5.2.2 L=10m.I.F=15m.I.FL=15m
Väg RV34 och LV636
Variabler Korrelations- Standardavvikelse
koefficient 0 P
IRI-IRIL
0.963
0.018
IRI-RMS 0.954 0.023 IRI-RMSL 0.962 0.019 RMS-RMSL 0.911 0.043Teoretiskt genererade vägprofiler
Variabler Korrelations- Standardavvikelse
koefficient o p IRI-IRIL 0.944 0.013 IRI-RMS 0.933 0.016 IRI-RMSL 0.900 0.023
RMS-RMSL
0.966
_
0.008
Det kan vara intressant att studera vad som händer om
högpass-filtret vid RMS-beräkningen' ändras. Detta framgår i avsnitt
5.2.3 där man tillåtit längre våglängder (LF=LFL=30 m). De i och
för sig höga korrelationskoefficienterna beror delvis på den
stora spännvidden i jämnhetsmått. Därför uteslöts det sämsta
vägavsnittet bland de teoretiska vägprofilerna i avsnitt 5.2.5., vilket leder till lägre korrelationskoefficienter.
IRIL (MM/M) IRI 20« § 10 (2 (MM/M) Figur 5.3 VTI MEDDELANDE 5 92 18 RMSL 20 1'4 135 ha IRI (mm/NO IRI 135 18 RMSL 1 p .-._-' I I _- i' (MM)
Samhörande värden mellan
L = 10 m. LF= 15 m. LFL= (MM) 20. 16 18 20 RHS 10 I: 1'4 (mm) (MM/m) 20-olika jämnhetsmått. 15 m. Väg RV34 och LV636
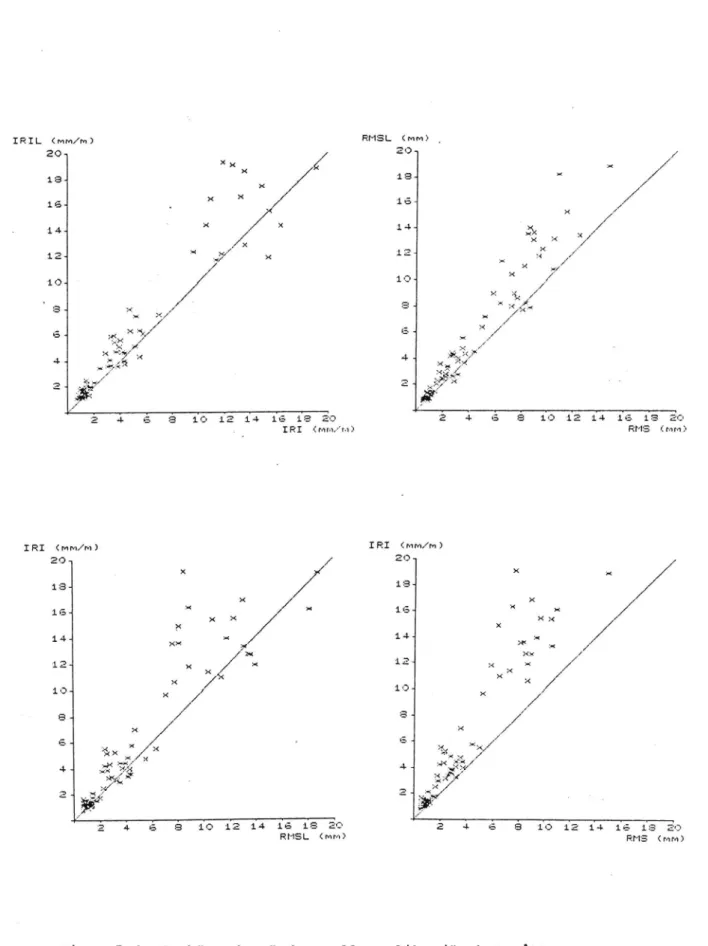
IRIL IRI 19 (MM/M) RIV1SL (mm) 'D 20« / ° ,/ x x x 4 2-! / 1 8 '4 8 .-4 H >< / - x x / '- - / 1 b 1 ä i 'J X /'//, X X 1 4 - ' / i 4 - Hxx \. x II A x A / // - "D /ll 1 2 q .se X .1. -_ - i _ H I/ * ' -" \ / / X A 21,. . 1 '2' - _lr/ 1. 0 - l/ 1 r. :i , / f , c. . :.l nam.. 8 - :4: x' '-' ' 'k -"-3-: 34,/ H / / __< _./ .- , : '. I 5- _ .-LJ q N< 3/3/ ... i //l/ ;järn/xx . . H 1 __,.. 4 -1 ,(111l q 3,!? ;i :ast-3:41!i x -N 3.:.: \ n I" s_.), .v". 9 4.7' 1-11/ 3 q crf! K h 1 "är :47...:-J'J!" .. :. 5 i 5 5 15 12 14 15 15 20 2 4 5 5 10 12 14 15 15 20 I P. I '1 M m/ M ) F:de ( mm ) (MM/M) IRI (mm/m) 2 j / 2 (D -X x 'A 1 8 - J. 8 -X X 1 2 a :4 // 7'* 1 '5 -< x H / X X x )-< ;< / < 1 4 4 ><:-< H . 1 4 - H* :q . / 'P' .-< 1/ N me. 1,/ 1 F: '-1 i q \ '_; 'I ;- q X ' I< \< ' / <$< x, _ X _ A / 1 I'Rl .. I t) -1 f F: / 'R . // x / G. -1 E' " "' ._< K x x x 2-: . zum'/ _ .1, 1 :92.5 4. 1 " __. 25/ 7 . == ?'q*.. ?5.0 _ »2:' '\ §4 .z ä 4 5 5 10 12 14 15 18 20 2 .1 .5 s 10 12 14 15 15 är.) RMSL (MM) RHS (M M)
Figur 5.4 Samhörande värden mellan olika jämnhetsmått. L = 10 m. LF= 15 m4 LFL= 15 m. Teoretiskt
genererade vägar
20
5.2.3 L=10m._I.F=30 m.LFL=30m
Väg RV34 och LV636
Variabler Korrelations- Standardavvikelse
koefficient . 6 P IRI-IRIL 0.963 0.018 IRI-RMS 0.713 , 0.123 IRI-RMSL 0.837 0.074 RMS-RMSL 0.656 0.142
Teoretiskt genererade vägprofiler
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0.944 0.013 IRI-RMS 0.914 0.020 IRI-RMSL 09905 0.022 RMS-RMSL 0.952 0.011
Man får härvid en sänkning av korrelationsvärdena där RMS-värden
är inblandade._FÖr att få likartade våglängdsområden bör alltså
båda signalerna filtreras med LF= LFL= 15 m.
Det kan vara intressant att öka intervall-längden L för att
min-ska eventuella effekter från föregående intervall. Vi väljer att
dubblera L men bibehålla högpassfiltreringen med LF= LFL= 15 m.
IRIL
IRI
21
Figur 5.5 Samhörande värden mellan olika jämnhetsmått. L = 10 m. LF= 30 m. LFL= VTI MEDDELANDE 5 92 ( MM/M ) RMSL (M M) ' 20 - / 20 - /
//
/
1 '8 - f/ 'l 8 - / l 6 " 1 D -1 / 1 d /\ 1 4 q // / 1 .p _ 1 2 .' // A / '1 O - / i 0 ' X I / / :3 _ Y / 8 " / / / |5 -1 6 ' /./ /z / '-1 \. I . / 4- - _ fw' 4' " ,/ ;gå i_' \ xJ< X X 2 -4 2 1/ x 3-< ;la/ø
. ' >-?< < 3 .4, L; 9 _1_ 0 122 14 15 1 s ;ä --1 så é (0 12 14 135 1:3 :30 I RI '1 MM/ M : RHS (MM) (MM/'m ) I RI ( FIM/ M ) 2C' '1 , 20 1 4 f/ // 1 8 - 1 8 < / 1 6 « 1 c - / // l4 i i 4 " / ./' / F_ / .J / l i / l *- * /I / // 1.:. _ ,< // .1. m 4 :< / / / z' .9 - / 9 /// /// _ /// .5 . //' 5:- < ',/ fx H /z d / r" 4 __ ./' .< 4 -4 // < 7/ K "- ;qv ' .Ä * 1-: :7" " ^ J/l // ä 4 é, a 10 12 14 16 18 20 3 4 :5 s 10 12 14 15 1:3 20 RHS l_ (MM > ' RHS (m M ) 30 m. Väg RV34 och LV636IRIL IRI 22 RMSL (MM) (MM/M) po. / __ h: :- 1 xx x /Ä X 18- x / , x 16- '\ 15' x x . x 14_ X ' X 14< A! :n: x 12- Å .. x 10- /// '9 ' 34:... :</ 10 / 5- :K,X7V/ :<ww : x' x 4.I :ä ä 4 5 e 10 12 14 16 18 20 14 15 19 20 IRI (MM/M) RHS (MM) (MM/M) IRI (MM/M) 201 // 20. X H X 7-: / 18- 18_ x x 16« x W 15. x ° X x X x 4x X / 14-4 N x x H H 34 x :<// m X ha: 12' x x/// H 12" x x // ., N /x Q K K 10-' x 1"* x // / §3 - 73 -4 // x / x f/. 5 ' _. '.' //f vx \:x» A ;_1 fill/rf. 4. 4- X :åäé: x §f & 1 .,§ 13 .. 5_ .1 t .-á .71 så, 10 12 14 1:5 1:5: 21 så á 10 12 14 135 18 20 RMSL (MM) RHS (MM)
Figur 5.6 Samhörande värden mellan olika jämnhetsmått. L = 10 ms LF= 30 m0 LFL= 30 m.
Teoretiskt genererade Vägar
ledas
23 /,
5.2.4 L=20 m. LF=15 m. LFL= 15m
Väg RV34 och LV636
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0.943 0.040 IRI-RMS 0.931 0.047 IRI-RMSL 0.952 0.033 RMS-RMSL 0.870 0.086
Teoretiskt genererade vägprofiler
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0.980 0.007 IRI-RMS 0.967 0.011 IRI-RMSL 0.965 0.012 RMS-RMSL 0.982 0.006
Man kan se en minskning i korrelation för de verkliga vägarna
medan de teoretiska uppvisar en Ökning. Detta kan troligen
här-till det begränsade antalet mätpunkter i fallet verklig
väg eftersom dessa sträckor var tämligen korta (100 m).
IRIL (MM/M) IRI 20- 18-16< 14. (MM/m) 201 18-é» 1.'0 12 24
/
14 ;155 IS IRI . 20 ( MM/ M '2 155 is 2'0 RMSL (MM) RMSL IRI (MM) 20-' 20 (MM) 1'4 135 IS ams 1'0 1'2 M + 5. m (MM/M) 20-p 4 |.. . M m r . ll L E 15 18 20 RHS 1'0 is 14 h h p m« 01 (mm)Figur 5.7 Samhörande Värden mellan Olika jämnhetsmått.
L = 20 m. LF= 15 m° LFL= 15 m. Väg RV34 och LV636
25 0 IRIL, (MM/M) R'MSL. (MM) 20- x // 20-' '/'x 19. x W X // 1a. *1 >< ' 1 6 - r/ 1 65 - / ,/ ,/ ,/ .r 1 ,/ 14- /' 14« * / f/ .Å / 4 V / 12- // 12« / if. .'/I/
.Vi/C % x'xu II.,
1% / 10m 1'; 'V _/ ,/ 3-: ,.-I 8 - :E: -4 _.I" 1/ < :5 . *< 5 . / X3.: 7;/ N / __c _( / 4% AC_ 4 Å -c - IR. . ,5" / är!" . / 5,» 2 'I 3 - #/ JF 3% r .f/' 2 4- B 8 '10 12 '14 155 18 20 13,3. [4 33.5 1353 äc. I F: I ( M m/ M ) RHS 0: mm ) I RI M M/M ') I RI 'i ram/m .3 O 1-i.. .'J. ' eoT ,
,
g
///
18_
xx
//,
18" f/ 1/ ny /// - K K // 1 L: -1 H x 'w' // 1b >< Å / 14. J/' 14- - // _..< , x x / ?2 x / 16:' /// . _I/ 3, h // ;3 m 0 l I 03 \ \ \ \ 'R ',/ X x_ 4 " >-:-v./ X 4 4 . få ;'< . .l 2 °' V1/ :- ' /l/år
3,/ A ä 4 6 e 10 12 14 16 18 20 2 4 e s 10 12 14 1e fa áo RMSL (mm) ams (mm)Figur 5.8 Samhörande värden mellan olika jämnhetsmått.
L = 20 m. LF= 15 m. LFL= 15 m.
Teoretiskt genererade vägar
26
5.2.5 L=10m.LF==30m.LFL=3Om
(Dålig väg ej med)
Teoretiskt genererade vägprofiler
Variabler Korrelations- Standardavvikelse
koefficient 0 P IRI-IRIL 0.917 0.023
IRI-RMS
0.876
"
0.034
IRI-RMSL 0.847 0.041RMS-RMSL
0 931 9
0 020
Man får som framgår av tabellen ovan en sänkning av
korrelati-onskoefficienterna jämfört med resultaten i avsnitt 5.2.2,
vilket inte är oväntat, eftersom den dåliga cementbetongvägen är borttagen. Denna representerar ett relativt ointressant fall för LIBELLANS tillämpningar.
27 IR'IL_ (MM/M) RMSL (MM) 20 - , Po - e /" ,1" 4/ I", 1 c' I/ /I/ ' .__. - ,r_/ 1 LJo _ . 6 _ , i _ z 1 'FI/,a 1 6 /r 1 4 - ,--"' 1 4- - l/ 'l 2 -< __./ 1 O . / 1 0 _ jr 8 -' < ./ F! - .I i. *i_./z - - 'z/ - v : ' / J/ u _ *i ,. \ 6 _ X / rip? _ ',/ :q 1./ K . -ll' .r /I J ,.sz . . F), ,...-4 - zur.. K 4_ _ få!) 12" 1-5 år?? HF \ - i :_( .- 4% -: . .påi " -c_ . \ v' .' H _ 19.! X
=
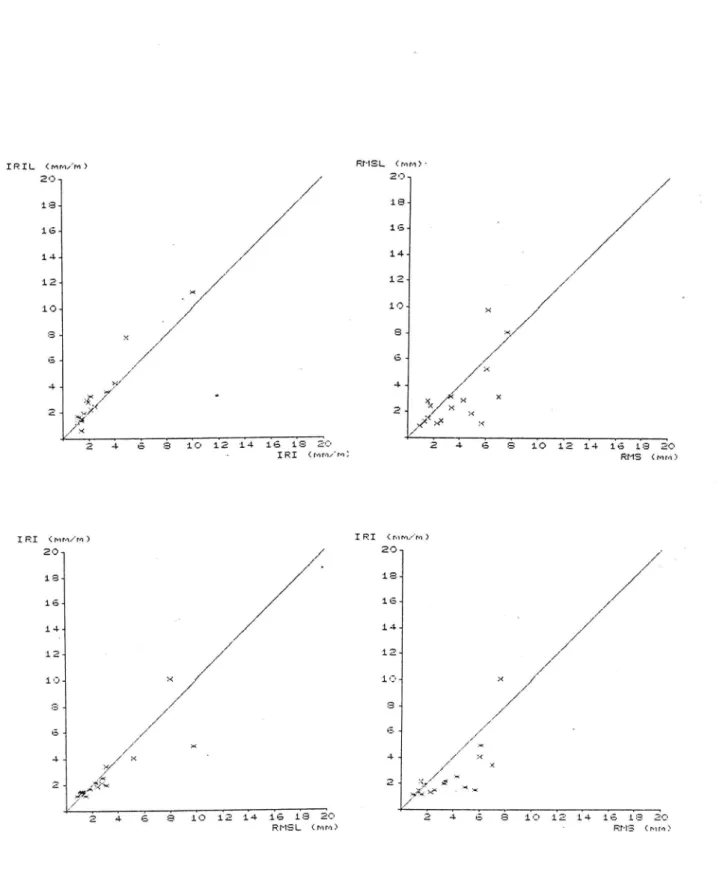
'/ /Ä* 4 s s 1'0 1'2 1'4 1'6 1'8 §0 ä 4 é :ä (0 1:-: 174 is rs 2'0 IRI ( mm/m) FMS (mm 7.' I RI 'i rr'nrv-'v./"'r-r L* I F:I f. ra'nr--m/ r-n I) 0-. . .-.-. 0 a E. G' -F. //Vf / '1 c: -4 '1 8 -< / I/l 1: 4 1 e _ .//. f l 2 - ' 1 2 .. .i I _/ //n'l ...r-'/ 1 O 4 / 1 0 a ,// I ,.ø ._x _ '/ .I ,i ?E //fl '- / l 6' * V 2-: fx, En IR . ' / IN <7' :<5 hp.: 4' ' 'pint 4» -9 v 3-! y/ - i .J 2 i é- 1'0 12 13; IE. T: R ME: L I: m 2' :arr-11:: n; mm ;I r-I .-. I I i- \_' [U 4. 01 33 H 4 0 .-1 In H .Ä R JiFigur 5.9 Samhörande värden mellanolika jämnhetsmått.
L = 100 m. LF= 15 m. LFL=15 m. Teoretiskt genererade vägprofiler. Dålig väg ej med
28
6 LlBELLA SOM PROFILOMETER
I detta avsnitt redovisas jämförelser mellan den verkliga
pro-filen och LIBELLANS mätsignal. Tillverkaren har själv angett att
"vid kontinuerlig mätning inträffar tre registreringar av samma
ojämnhet. Den mittersta av registreringarna är dubbelt så stor
som den första resp. den tredje. Registreringsunderlaget måste
därför läsas på ett speciellt sätt. Tolkningen av värdena är
lätta att göra efter utbildning och praktik. Denna undersökning
ger inget stöd åt dessa påståenden.
De egenskaper som intuitivt angavs i avsnitt 2.1 bekräftas av
dessa kurvor. Förstärkningen av våglängder runt 5 m.med en
fak-tor två är klart synlig i speciellt figur 6.1.c medan den av
tillverkaren angivna trippelregistreringen i stort sett saknas.
Överensstämmelsen mellan kurvorna kan troligen göras något
bättre genom att högpassfiltrera båda kurvorna med en lämplig
undre gränsfrekvens. I figur 6.1 ser man nu tydligt LIBELLANS
högpassfiltrerande inverkan.
29 a) PRUF EMM) _ .-\ .Ca '..' -.5 :1. [dl ._ 7 "" \ 0 '._.' -1 201.::) -. '- - - .'--4-2'17' ._ Y .- _ _ _ - c : - .- , __ .v ' _ .-lpgüwmeø' EG T?0 _w " En: 50 se , _ DIET CM) - -- |___a ..b_ _.1', 1"'u ..\_ ._. -- :2:3 .. - 0:] _.
b)
PRDF (MM) [2' ,Al ._,l -_ .q 4t___| .. 3(:1 .. r- .-s.J [dl _. 1 '33 -<.. o .-- '. ...-t" ' _'-1.. - I *'.., _;' F 1__ ' _ 1' n* 1.' .-' 5' ,. 3' l ..,..'H ' L I'1 'i .-x. -a .' \ _I' .3. 'tiga . _'x' .1:--- . \ 0.-, fw.. 4,: r: Fy. . q_ ' - .-.
_ 1 ...i _ xt' . . ,a ra; .;_ ._ ..._A..r-'.___' .__. ._.I ., _.0 ri '.x _. ,I ._J'._ \ _,- ._1 C;.'._.'
'-' "' 'u.-'-. .-' fä.. r" "'--""" . - - -' 'z " \' \\_-". DI ST E. N .-' 0'sh-s., ,J0 4-. 3- 'a _:.- k.) "- -...q ,.._ _':' 'w' 'J -40-*504 c) F' F: '3 F' '2 NM i) 51:)-4 i... ' -0 IF PJ* 5 |'$ __7: f'ø_ - 4 l". l.U' M-' "''-x._."J' v.'i| l| .i0'J :(3 .. .M ' "i I, I ' " 3 i' |' J' l' *L N , M a _' l i t' I .'l , l 1"*.. ' 1 . |'° | t I . a I| där'I "I .i J " \ I I . .i J " | ' 'u_.' i 1 I' '[ 'Jr I*J I 1 l :3% " ' _, _'1.I ' f ' I l 9 'II'll I II I. 0' -' '-I 1 '- 1137. r .| .I' än?? ' ' '4. *. H1 (4' "a I :' '| 14 L' 1. N ' ,e 57'.. ' .' *z '3 ...-' | | . . -1 '_. . __ I I v' .' i l' N' '1' "1 - i: '| '| 0' I ' J' | ' t' I'TziT ' [V1 ' __ _ n . n . \ -dtJ H ".*: lmlüåä "av 5' | ä s J'0 J " J __z '_l I 1' '_0' |J| lt... I . I". .o ," I 5 --' - ' \. I .' " t^ ha *' -l' |___| .. sl!
Figur 6.1 Jämförelse mellan LIBELLANS mätsignal (---) och
vägprofilen (---)för de teoretiskt genererade
profilerna.
a) Mycket bra cementbetongväg
b) Bra asfaltbetongväg
0) Dålig cementbetongväg
30
7 DISKUSSION OCH SLUTSATSER
Av resultaten i föregående avsnitt framgår att man får höga
kor-relationskoefficienter mellan de olika jämnhetsmåtten vid en
lämplig längdindelning och filtrering. Självfallet beror detta i
viss utsträckning på att de teoretiskt genererade vägprofilerna
bildar tre åtskilda punktskaror, vilka sammantaget ger hög
kor-relation. Studerar man exempelvis enbart en av dessa punktskaror
blir korrelationen mycket lägre. Man bör då betänka att dessa
teoretiska profiler innehåller alla våglängder från
spektraltät-heten i varje delintervall till skillnad mot de verkliga
vågpro-filerna som delvis kan vara mycket jämna för att sedan avbrytas
av ett skarpt gupp med höga vågtal. Detta framgår även av diag-rammen i föregående avsnitt (figur 5.3) där de verkliga
vågpro-filerna med L=1O m ger IRI-värden mellan 1.-11.mm/m.
Högpassfiltreras profilerna med LF= 15 m blir korrelationen
hyg-glig mellan samtliga jämnhetsmått då man kör över vägar med
va-rierande standard. Slutsatsen blir att det är möjligt att
sär-skilja vägavsnitt med IRI-värden som skiljer sig åt med en
fak-tor två. År skillnaden bara 20-40% blir spridningen betydligt
större. Studera exempelvis punkterna från den dåliga
cementbe-tongvägen i figur 5.4. Det beror ju självklart på tillämpningen
om denna noggrannhet skall anses vara tillräcklig. Mera intres-sant kan vara att konstatera att LIBELLAN i allmänhet, men inte . alltid, ger en överskattning av IRI-värdet beroende på
förstärk-ningen av våglängder runt 5 m. Resultaten indikerar att denna
överskattning kan röra sig om 50% av det verkliga IRIvärdet.
Härav kan man givetvis inte dra slutsatsen att det verkliga
vär-det alltid ligger drygt 30% under IRIävärvär-det beräknat på
LIBEL-LANS uppmätta profil, men för vägar med normalt frekvensinnehåll kan ovanstående uppskattningar tjäna som tumregel.
31
Som profilometer är LIBELLAN mera tveksam, åtminstone om man
förväntar sig men 1-1 överensStämmelse. Den inbyggda
förstärk-ningen för våglängden 5 m är klart skönjbar i diagrammen för
LIBELLANS signal och den verkliga profilen. Man skulle
even-tuellt kunna tänka sig att konstruera ett filter för att
kom-pensera för denna ofullständighet men detta bedöms ligga utanför ramen för denna rapport.
REFERENSER
1. Sawyers,.M;w. & Gillespie, T.D.: The Ann Arbour Road
Profilometer Meeting. Report UMTRI-85-40, 1985
2. Braun, H.: Untersuchungen von Fahrbahnunebenheiten und
Anwendungen der Ergebnisse. Diss., Braunschweig 1969
3. PaLmkvist, G.: Intern PM, VTI 1988