Postadress: Besöksadress: Telefon:
Box 1026 Gjuterigatan 5 036-10 10 00 (vx)
Stopp för mekaniskt
vevbord
HUVUDOMRÅDE: Maskinteknik
FÖRFATTARE: Filip Anderfelt & Filip Svensson HANDLEDARE:David Samvin
Detta examensarbete är utfört vid Tekniska Högskolan i Jönköping inom Maskinteknik – Design och Produktutveckling. Författarna svarar själva för framförda åsikter, slutsatser och resultat.
Examinator: Magnus Andersson Handledare: David Samvin Omfattning: 15 hp (grundnivå)
Sammanfattning
Abstract
ROL Ergo is a company that manufactures and develops height-adjustable tables. Their product line-up consists mainly of electrically operated tables, but also a small-scale of tables where the height is determined by a hand-driven crank.
One problem with ROL Ergos hand-operated crank table, PR25 2-column 2-stage crank, is the function of stopping the table after 470 mm which is the tables desired stroke. The solution the existing table have, to prevent this from happening, is a plastic stop mounted on top of the table’s outer legs.
This plastic stop is intended to stop the table when the leg reaches its highest position. The hand crank used to change the height of the table have an integrated torque clutch which is used to prevent that the torque applied to the crank exceeds 4.3 Nm. However, the force applied to the plastic part that is generated by the hand crank is greater than what the plastic part is constructed for. This results in the stop being pushed out of its position and must be mounted back by hand, or in worst case, breaks.
This report covers the steps taken to find a solution to this problem. Initially, the forces generated by the hand crank in the tables height adjustable system is needed. When these forces were calculated the process of finding concepts and solutions could begin. When a final concept was defined, the solution was verified with simulations and physical tests to ensure the concept’s stop function.
Through this process the work resulted in a concept where a C formed ring is mounted onto the table’s thread bars. This ensures that the thread bars are prevented to thread further than the desired height. By using results from calculations, simulations and physical tests, the developed concept could be verified to withstand the forces generated by the hand crank in order to stop the table at the desired stroke.
Sammanfattning
Sammanfattning
ROL Ergo är ett företag som tillverkar och utvecklar höj- och sänkbara bord. Deras sortiment består huvudsakligen utav elektriskt drivna bord, men de säljer även, i liten skala, bord där höjden bestäms utav sprintar eller en handdriven vev.
Ett problem som ROL Ergo har med sitt handdrivna vev-bord PR25 2-column 2-stage crank är funktionen att stanna bordet efter önskad slaglängd. Bordets slaglängd är ett mått som mäter förändringen utav bordets höjd mellan dess lägsta och högsta läge. Lösningen som bordet har för att stanna bordet vid önskad position är en stoppring monterad på toppen utav de yttersta benen. Denna stoppring är tänkt att stanna bordet när benens glidlager tar emot stoppringen. På grund av att vevens integrerade momentspärr är definierad för ett moment på 4.3 Nm genereras en kraft som trycker mot stoppringen som är större än det stoppringen lyckas hålla emot. Resultatet av detta blir att stoppringen trycks ut ur sitt läge och ringen måste monteras tillbaka för hand, eller i värsta fall, går sönder.
Rapporten omfattar de steg som har tagits för att finna en lösning för att stoppa bordet vid den slaglängd som bordet är tänkt att ha. Detta har gjorts med hjälp av en produktutvecklingsprocess. Till en början gjordes handberäkningar för att beräkna de krafter som handveven genererar i bordets höj- och sänksystem. Därefter togs ett koncept fram med hjälp av en kravspecifikation, brainstorming och sållning. Konceptet verifierades därefter med simulationer och fysiska tester för att säkerställa konceptets funktion.
Genom denna process resulterade arbetet i ett koncept där en C-ring monteras i en svarvad profil på bordsbenens gängstänger som ser till att gängstången inte kan gängas vidare vid önskad höjd. Genom att använda resultat från handberäkningar kunde simuleringar och fysiska tester verifiera att det framtagna konceptet håller för de påfrestningar som stoppet utsätts för.
Sammanfattning
Förord
Detta arbete är ett examensarbete i Maskinteknik - Produktutveckling och design på Jönköpings tekniska högskola. Uppkomsten till möjligheten att skriva ett arbete på ROL Ergo grundas i tidigare utförd NFK (näringslivsförlagd kurs) samt företagets vilja att forma studenter för en framtida karriär inom ingenjörsyrket. Arbetet hade inte varit möjligt om inte vissa nyckelpersoner hade visat intresse och förståelse för olika problem längs vägen.
Därför ges ett tack till följande:
David Samvin: Handledare och kursansvarig - examensarbete i maskinteknik på Jönköpings tekniska högskola. För all hjälp med hur examensarbetet skulle utformas på bästa vis, samt teknisk rådgivning angående använda matematiska ekvationer och simuleringar.
Fredrik Ekvall: Utvecklingschef på ROL Ergo och ägare av utfört arbete och projekt. För att ha tagit sig tid till att skapa förutsättningarna för utfört arbete.
Rebecka Chiu: Handledare och industriell designer på ROL Ergo. För att ha hjälp till och skapat rätt förutsättningar för att skriva utfört arbete.
Samt alla på ROL Ergo och Jönköpings tekniska högskola som har gjort examensarbetet möjligt genom att besvara frågor och hjälpt till när problem har uppstått.
Innehållsförteckning
Innehållsförteckning
1
Introduktion ... 8
BAKGRUND ... 8
PROBLEMBESKRIVNING ... 9
SYFTE OCH FRÅGESTÄLLNINGAR ... 11
AVGRÄNSNINGAR ... 12
DISPOSITION ... 12
2
Teoretiskt ramverk ... 13
KOPPLING MELLAN FRÅGESTÄLLNINGAR OCH TEORI ... 13
TRANSMISSION ... 14 2.2.1 Utväxling ... 14 KUGGVÄXLAR ... 14 2.3.1 Snäckväxel ... 15 2.3.2 Konisk kuggväxel ... 15 SKRUVFÖRBAND ... 16 BERÄKNINGAR ... 16
2.5.1 Uträkning för utgående moment i snäckväxel ... 16
2.5.2 Utgående moment på en vinkelväxel ... 17
2.5.3 Axialkraft i skruvförband ... 19
FEMANALYS ... 20
PLASTICITET OCH ELASTICITET ... 21
3
Metod ... 22
KOPPLING MELLAN FRÅGESTÄLLNINGAR OCH METOD ... 22
VALIDITET OCH RELIABILITET ... 23
FRÅGEMETODEN ... 23
3D-PRINTING ... 23
Innehållsförteckning
KONCEPT OCH PRODUKTFRAMTAGNING. ... 25
BRAINSTORMING ... 25
KONCEPTSÅLLNING ... 26
3.9.1 Pughs Beslutsmatris ... 26
3.9.2 Fokusgrupp ... 26
SOLIDWORKS ... 26
SIMULERING I SOLIDWORKS ... 27
4
Genomförande och resultat ... 28
BERÄKNINGAR ... 28 4.1.1 Vev-bordets system ... 28 4.1.2 Beräkningar steg 1 ... 29 4.1.3 Beräkningar steg 2 ... 30 4.1.4 Beräkningar steg 3 ... 32 4.1.5 Test av momentspärr ... 34 RESULTAT FRÅGESTÄLLNING 1 ... 35 KONCEPTFRAMTAGNING ... 35 4.3.1 Kravspecifikation ... 35 4.3.2 Brainstorming ... 36
4.3.3 Koncept efter brainstorming ... 36
4.3.4 Sållning ... 39 VIDAREUTVECKLING ... 39 4.4.1 Fjäderstopp. ... 39 4.4.2 Mutterglid ... 40 4.4.3 C-Ring ... 42 RESULTAT FRÅGESTÄLLNING 2 ... 43
FYSISK TEST (VERIFIERING AV KONCEPT) ... 45
4.6.1 Simulering ... 45
4.6.2 Resultat Simulering – Polyactic Acid (PLA) ... 47
4.6.3 Test av C-ring ... 48
Innehållsförteckning
5
Analys ... 53
FRÅGESTÄLLNING 1 ... 53
FRÅGESTÄLLNING 2 ... 53
FRÅGESTÄLLNING 3 ... 54
6
Diskussion och slutsatser ... 55
DISKUSSION ... 55
IMPLIKATIONER ... 58
SLUTSATSER OCH REKOMMENDATIONER ... 59
6.3.1 Rekommendationer ... 60
VIDARE ARBETE ELLER FORSKNING ... 61
7
Referenser ... 63
Introduktion
1
Introduktion
Bakgrund
ROL Ergo är ett företag som tillverkar höj och sänkbara bord. Som företag har de bland annat anläggningar i Sverige, Litauen, USA och Kina. Deras huvudsakliga utvecklingsarbete försiggår i Jönköping, Sverige.
ROL Ergos sortiment består inte enbart utav elektriska höj- och sänkbara stativ, utan även mekaniska. Dessa stativ höjs och sänks med hjälp av en handdriven vev.
Deras mekaniska vev-bord heter PR25 2-column 2-stage crank och är en produkt som till största del säljs i USA. Bordet är ifrån serien PR25 Manual där bordet antingen kan köpas med vev, stegvis höjning eller helt statiskt vid en viss höjd. Bordet har en slaglängd på 470 mm som är skillnaden i höjd mellan bordets lägsta och översta läge. Med hjälp av veven, roteras en axel som genom en snäckväxel överför rotationen 90 grader till den underliggande axeln som löper mellan de två benen. I varje ben sitter det sedan en konisk kuggväxel som sitter monterad på en gängstång. Kraften överförs till dessa gängstänger som sitter monterad horisontellt inne i respektive ben. Två spindlar, se figur 2 och 3, sitter monterad på ett sådant vis att när gängstängerna snurrar kommer de gängas genom dessa. Detta i sin tur gör så att bordet höjs eller sänks.
Introduktion
Problembeskrivning
ROL Ergo tillverkar ett mekaniskt höj och sänkbart stativ där en vev med en vridmomentsspärr används för att ändra höjden på bordet. När bordet höjs till det tänkta översta läget tar benens glidlager emot en stoppring som skall förhindra bordet att höjas mer (se bilaga 5). Tanken är att stoppringen skall hålla emot den axiala kraft som uppstår i benens gängstänger när vevens vridmomentspärr når sitt maximala vridmoment på 4.7 Nm. Denna kraft genereras genom att moment tillförs till veven som transformeras med hjälp av kuggväxlar till benens gängstänger.
Figur 2. Visualisering utav komponenter inuti stativets ben.
Problemet som uppstår i bordet är att den existerande stoppringen, som idag används, inte lyckas hålla emot den kraft som veven genererar vilket resulterar i att vridmomentspärren inte når sitt maximala vridmoment. På grund av detta trycks de två stoppringarna ut ur sin position och måste manuellt tryckas tillbaka, eller i värsta fall, går sönder.
Introduktion
Figur 3. Visualisering utav benens ingående delar.
Figur 4. visar hur det kan se ut när glidlagren trycker ut stoppringen ur sin tänkta position när bordet höjs. Bilden längst till vänster visar bordet i en neutral position där glidlagren och stoppringen inte rör varandra. Bilden i mitten visar det tänkta översta läget, där stoppringen tar emot glidlagren för att förhindra fortsatt förhöjning. Bilden till höger visar hur glidlagren trycker ut stoppringen och bordet höjs ytterligare.
Introduktion
Detta problem uppstår på grund av att det mekaniska bordet inte har något inbyggt stopp när det når det översta läget. Om ett moment på över 4.3 Nm skulle tillföras skulle vridmomentspärren se till att veven kuggar ur istället för att fortsätta att förse axeln med moment. I bordet är detta inte möjligt eftersom stoppet inte är konstruerat för att hålla emot denna typ av påfrestning.
Syfte och frågeställningar
Syftet med denna rapport är att utveckla ett stopp till ROL Ergos mekaniska höj- och sänkbara bord. Stoppet skall förhindra att bordet höjs utöver den slaglängd som är bestämt för att förhindra att stoppringarna som används i dagens bord trycks ut. För att kunna konstruera ett stopp för bordet bör de ingående krafterna i bordets höj- och sänksystem tas med i beräkning. Med en förbättrad stoppfunktion ger det ROL Ergo möjligheten att erbjuda en bra och kvalitetsinriktad produkt som i sådana fall går i samma linje som deras övriga produkter.
För att kunna förstå de krafter som det nya stoppet måste förhindra måste uträkningar kring bordets höj och sänksystem göras. Moment och krafter som veven skapar måste beräknas för att kunna konstruera ett stopp som kan utföra funktionen. Med hjälp av denna kunskap kan sedan stoppet konstrueras och simuleringar skapas för att verifiera stoppfunktionen. Detta är kortfattat de steg som utfördes i projektet. Dessa steg har därför definierats som tre olika frågeställningar.
Studiens frågeställningar är:
[1] Vilka krafter uppstår i bordet när veven når sitt maximala vridmoment?
[2] Hur skall ett stopp utformas för att förhindra bordet att höjas över det översta tänkta läget?
Introduktion
Avgränsningar
Projektet kommer innefatta att lösa problemet angående upphoppande stoppningar, men kommer att kräva att hänsyn tas till stora delar av nuvarande vev-system. Arbetet kommer inte ta hänsyn till lagar och regler angående elektrisk hårdvara för elektriska höj och sänkbara bord. Tester för brandsäkerhet och massproduktion kommer inte att göras under projektet. Toleransstandarder som SS-ISO 2768-1m / SMS 723 AA kommer inte att användas, men kan bli aktuellt vid mån av tid. Användning av förnyelsebara material kommer inte att tas hänsyn till vid ide-generering eller konceptide-generering. Först vid konceptutveckling kan förändringar i design göras för att passa ett återanvändbart material om konstruktionen tillåter detta. Hänsyn till redan existerande komponenter från ROL kommer inte tas i konceptgenerering, först i konceptutveckling kommer konstruktionen ändras i den mån den kan för att återanvända redan använda komponenter. Projektet kommer bara att fokusera på att lösa att stoppa uppgående bordsskiva, men om problemet löses innan utsatt tid, kommer andra problem angående vev-systemet att påbörjas. Vid fullgott resultat kommer detta att tas med i Examensarbetes-rapporten, men vid halvklart resultat kommer detta inte ingå.
Disposition
Denna examensarbetesraport är uppbyggd på ett sådant vis att läsaren får ta del av problemet och avgränsningar i kapitel 1 introduktion. Läsaren får sedan den kunskapen som behövs för att förstå senare resultat och argumentation i kapitel 2, Teori. I kapitel 3, Metod, får läsaren en inblick över de metoder som användes för att besvara rapportens frågeställningar. Kapitel 4, Resultat och genomförande, tar upp arbetets resultat på olika plan så som tester och produktutveckling. Även genomförandet på respektive del beskrivs här. Kapitel 5, Analys, skapar en förståelse för hur de frågor som ställdes i ett tidigt skede i projektet kan besvaras och analyseras. I kapitel 6, Diskussion och slutsatser, presenteras slutsatser angående det utvecklingsarbete som har gjorts. Slutsatserna diskuteras och rekommendationer visar på hur slutsatsen bör tolkas. Kapitel 7 och 8, Referenser och Bilagor, presenterar bilagor och annan information som tillför förståelse till arbetet.
Teoretiskt ramverk
2 Teoretiskt ramverk
Koppling mellan frågeställningar och teori
För att besvara de frågeställningar som har ställts måste några teorier tas hänsyn till. Följande beskrivs vilka teorier som kopplas till frågeställningarna.
1. Vilka krafter uppstår i bordet när veven når sitt maximala vridmoment?
För att besvara den första frågeställningen krävs kunskap kring vevbordets ingående system. Här krävs kunskap om transmission, kuggväxlar och skruvförband för att sedan kunna beräkna moment och krafter som uppstår.
2. Hur skall ett stopp utformas för att förhindra bordet att höjas över det översta tänkta läget?
För att besvara den andra frågeställning krävs teoretisk kunskap inom hur bordet och dess ingående system är uppbyggt. Därför krävs kunskap inom kuggväxlar och gängstänger men även de ingående krafterna i bordet.
3. Hur skall stoppfunktionen av ett utvecklat stopp verifieras?
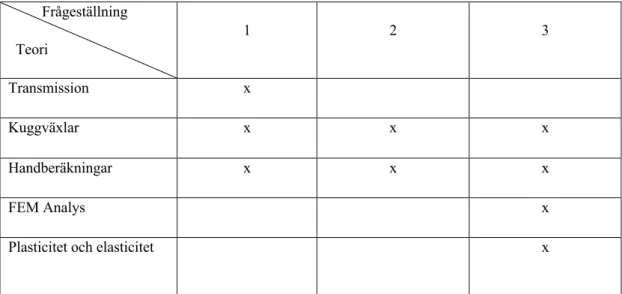
För att besvara på den tredje frågeställningen krävs förståelse kring simulationsteknik och plasters deformationer. För att få en förståelse kring simulationsteknik krävs kunskap inom hur simulationsprogram beräknar med hjälp av finita elementmetoden (FEM). Frågeställning Teori 1 2 3 Transmission x Kuggväxlar x x x Handberäkningar x x x FEM Analys x
Plasticitet och elasticitet x
Teoretiskt ramverk
Transmission
En anordning som mekaniskt överför effekt från en position till en annan kallas för en mekanisk transmission. Mekanisk transmission används för att anpassa hastighet och belastning mellan en drivkälla och en förbrukare. Beroende på transmissionens konstruktion finns det olika typer av rörelseöverföring där kombinationen av rörelse till rörelse är den vanligaste. Mekaniska transmissioner utnyttjar kontaktkrafter eller friktionskrafter mellan mekaniska komponenter för att utföra transmissionen. Formbetingade transmissioner är en typ av mekanisk transmission där effekt överförs med normalkrafter. En av de vanligaste typerna av denna formbetingade transmission är kugg- och snäckväxlar. [1]
2.2.1 Utväxling
Utväxling 𝑖, är en karaktäristisk storhet för en transmission som vanligtvis definieras som kvoten mellan in- och utgående hastighet 𝜔. Vid rotation är en transmissions utväxling [1]:
𝑖 = 𝜔!"
𝜔#$ (1)
När två kugghjul med olika diametrar sammankopplas och roteras förändras rotationshastigheten i förhållande till de tangerande diametrarna. Utväxlingen
beskriver förhållandet mellan de två hjulens diametrar, kuggantal och vinkelhastighet och betecknas med 𝑖. Utväxlingen för kugghjul beräknas enligt följande:
𝑖 = 𝑛% 𝑛& = 𝜔% 𝜔& = 𝑧& 𝑧% = 𝑑& 𝑑% (2)
där 𝑛%,& är rotationshastigheten i rpm, “revolutions per minute”, 𝜔%,& är
rotationshastigheten i radianer per minut, 𝑧%,& är antalet kuggar och 𝑑%,& är diametern
på respektive hjul. Utväxlingen räknas alltid i den effektöverförande riktningen utifrån hjulens varvtal. [1]
Kuggväxlar
Den enklaste form av kuggväxel består utav två hjul försedda med kuggar längs hjulens omkrets. När ett av hjulen roteras bredvid det andra griper kuggarna in i varandra och kan därmed överföra rörelse från det ena hjulet till det andra. Rörelsen som kugghjulen skapar är en kombination av rullning och glidning. För att få en mjuk rörelseöverföring måste kuggarna vara avrundade vilket minskar mängden glidning hos hjulen. Kuggväxlar är formbetingade transmissioner eftersom kraften mellan kuggarna är riktade längs den gemensamma kontaktnormalen till de krökta kuggytorna. [2]
Teoretiskt ramverk
Det finns många olika varianter av kuggväxlar där axelorientering, form på kugghjulen samt form på kuggarna kan variera. Denna rapport behandlar endast kuggväxlar med koniska hjul samt snäckväxlar.
2.3.1 Snäckväxel
Om två hjul med utvändig snedkugg, som har snedvinklarna 𝛽% och 𝛽&, samarbetar
kommer hjulens axlar att korsa varandra med vinkeln 𝛴 = 𝛽%+ 𝛽&. En skruvhjulsväxel är en växel med snedkugghjul där 𝛴 ≠ 0. Dessa typer av växlar arbetar med punktkontakt mellan ytorna vilket begränsar kontaktöverföringsförmågan.
Snäckväxeln är en variant av skruvhjulsväxel, med axelvinkel 𝛴 = 90°, som använder sig utav ett hjul med liten diameter och få kuggar där vanliga kuggtal är z = 1, 2, 3. Detta lilla hjul liknar en skruv och brukar därför kallas för snäckskruv. Det andra hjulet är större och har många fler kuggar. Detta hjul brukar kallas för snäckhjul. Denna växel medger nedväxling av varvtal men ökning i moment. I regel ger snäckväxeln en stor utväxling, men mindre utväxling kan förekomma. [2, sid 462 - 467]
Figur 5, Visualisering av en snäckväxel med snäckskruv och snäckhjul. 2.3.2 Konisk kuggväxel
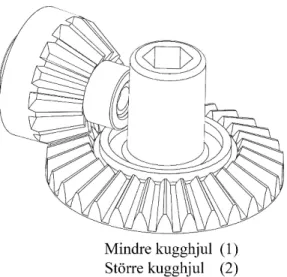
I en konisk kuggväxel har kugghjulen en konisk form. Dessa kan, vid stadium av rörelseöverföring, tänkas som rullkoner med en viss konvinkel. I en konisk växel sammanfaller båda rullkonernas toppar med axlarnas skärningspunkt. Kuggformen som förekommer på hjulen i denna typ av växel är hjul med raka kuggar och spiral- eller bågformade kuggar. [1]
Teoretiskt ramverk
Figur 6, Visualisering av en konisk växel.
Skruvförband
Ett skruvförband är ett förband som förbinder ihop delar med hjälp av en skruv. De sammanfogade delarna hålls ihop av en skruv som skruvas in i ett gängat hål i en av de ihopsatta delarna, eller hålls på plats med hjälp en påskruvad mutter. I ett skruvförband har skruven en utvändig gänga och muttern, eller det gängade hålet, en invändig gänga.
Figur 7. Typiskt skruvförband med verkande krafter, [2, sid 63].
Beräkningar
2.5.1 Uträkning för utgående moment i snäckväxel
På grund av snäckväxelns utformning måste friktionen tas i hänsyn vilket även ger en verkningsgrad 𝜂. Med verkningsgradens ekvationer kan det utgående momentet 𝑀&
Teoretiskt ramverk
𝜂 = 𝑀& 𝜔&
𝑀% 𝜔% (3)
där 𝑀% är det ingående momentet, 𝑀& är det utgående momentet och 𝜔%,& är
vinkelhastigheten på respektive hjul.
Med ekvation (1) samt (3), kan ekvationen skrivas om enligt följande:
𝜂 = 𝑀&
𝑀% 𝑖 (4)
För att kunna bryta ut 𝑀&, behöver verkningsgraden i växeln beräknas. Verkningsgraden kan räknas ut med hjälp av en annan ekvation som använder skruvens stigningsvinkel 𝛾% och friktionsvinkeln 𝜌% [2, sid. 466].
𝜂 = tan 𝛾%
tan(𝛾%+ 𝜌() (5)
I avsnitt 2.3.2 har snäckväxlar axelvinkeln 𝛴 = 90°.När detta är fallet kan utväxlingen beräknas med följande ekvation och stigningsvinkeln 𝛾 kan brytas ut
[2, sid. 464]. 𝑖 = 𝜔% 𝜔& = 𝑧& 𝑧% = 𝑑& 𝑑%∗ tan 𝛾% (6) 𝛾% = tan)%9 𝑑& 𝑑%∗ 𝑖: (7)
Med friktionskoefficienten µ och flanknormalen 𝛼" beräknas friktionsvinkeln 𝜌′, där flanknormalen beräknas enligt följande [2, 465]:
𝛼" = tan)%(tan 𝛼 *+ cos 𝛾%) (8) tan 𝜌( = 𝜇 cos 𝛼" ⇒ 𝜌( = tan)%9 𝜇 cos 𝛼": (9)
2.5.2 Utgående moment på en vinkelväxel
Vid bestämmandet av det utgående momentet hos en vinkelväxel krävs det att beräkna periferikraften 𝐹, som påverkar kugghjulen. Enligt Newtons III lag har alla krafter en
motkraft [12]vilket betyder att periferikraften som påverkar det mindre kugghjulet är lika stort som den kraft som påverkar det stora. Med detta kan det utgående momentet räknas ut.
Teoretiskt ramverk
Figur 8. Visualisering utav större och mindre kugghjul i en vinkelväxel.
Den resulterande kraften 𝐹" på en kugg kan delas upp i tre olika krafter som enligt figur
9. Periferikraften 𝐹, kan beräknas med hjälp av momentet på axeln [2, sid 457].
𝐹, = 𝑀
𝑅 sin 𝛿 (10)
Teoretiskt ramverk
För att räkna ut 𝐹, med hjälp av momentet skall konlängden 𝑅 till kraftresultatens position och kugghjulens delningskonsvinklar 𝛿%,& användas. Då kraften inte fördelas jämnt över hela kuggens bredd så antas, vid ideala förhållanden, att periferikraften påverkar mitt på kuggen. Med detta kan periferikraften i kuggens mitt beräknas ut med ekvationen för generatrisen 𝑅- till kuggens mitt [2, sid 458]
𝑅! = 𝑅" −𝑏
2 (11)
För att beräkna kugghjulens delningskonvinkel används växelns utväxling 𝑖. Vid speciella fall där växelns axelvinkel Σ är 90° kan delningskonvinklarna beräknas enligt följande [2, sid 456]:
𝛿
"= tan
#"1
𝑖
& 𝛿
$= tan
#"𝑖
(12)Som tidigare förklarat beräknas Periferkraften med hjälp av det mindre hjulets värden [2, sid 458].
𝐹,- = 𝑀%
G𝑅.%− 𝑏%
2
K L sin 𝛿% (13)
När periferikraften har beräknats på det mindre kugghjulet kan det utgående momentet beräknas med hjälp av motsvarande värden på det större kugghjulet [2, sid458].
𝑀& = 𝐹,-G𝑅.&− 𝑏&
2
K L sin 𝛿& (14)
2.5.3 Axialkraft i skruvförband
För att beräkna axialkraften som uppstår i benens gängstänger används beräkningar för skruvförband. För att räkna ut axialkraften beräknas det totala moment som påverkar gängstången. Detta på grund av att utöver friktionen i gängorna finns det friktion mellan skruven och underlaget vilket påverkar momentet vid åtdragning och lossning. Därför beräknas det totala moment på följande sätt [2, sid 66],
M/0/ = Må/+ M234 (15)
där 𝑀å$ är åtdragningsmomentet och 𝑀567 är friktionsmomentet från kontakten mellan skruv/mutter och underlag. Med tillräcklig noggrannhet kan friktionsmomentet 𝑀567 utryckas med följande ekvation [2, sid 66],
Teoretiskt ramverk
där 𝜇5 är underlagsfriktionen (skruv/mutter mot underlag), 𝐹6+ är skruvens axialkraft och 𝑟- är anliggningens medelradie, vilket betyder medelradien mellan skruv/mutter till underlaget.
Åtdragningsmomentet beräknas med hjälp av gängans stigningsvinkel 𝛾 och skenbara friktionsvinkel 𝜌( som även de behöver beräknas. Stigningsvinkeln är gängans
geometriska form och beskrivs med hjälp av gängans delningsdiameter 𝑑& och stigning 𝑃, enligt följande [2, sid 57]:
𝛾 = tan)% 𝑃
𝜋 𝑑& ⇒ 𝛾 = tan)% 𝑃
𝜋 2 𝑟& (17)
Den skenbara friktionsvinkeln 𝜌( är den vinkel som friktionen påverkar skruven och
beräknas med friktionskoefficienten mellan skruven och den invändiga gängan 𝜇& samt gängans halva profilvinkel 𝛼. Med dessa parametrar beräknas den skenbara friktionsvinkeln på följande sätt [2, sid 64]:
𝜌( = tan)% 𝜇&
cos 𝛼 (18)
När 𝛾 och 𝜌( är bestämda kan åtdragningsmomentet 𝑀
å$ definieras [2, sid 66].
𝑀å$ = 𝐹6+𝑟&tan(𝜑 + 𝜌() (19)
När både 𝑀567 och 𝑀å$ är definierade används formeln för det totala vridmomentet 𝑀$*$ , ekv. 15, och axialkraften 𝐹6+ kan brytas ut.
𝑀$*$ = 𝑀å$+ 𝑀567 ⇒ 𝑀$*$ = 𝐹6+𝑟&tan(𝜑 + 𝜌() + 𝜇5𝐹6+𝑟- ⇒ ⇒ 𝐹6+ = 𝑀$*$ 𝑟&tan(𝜑 + 𝜌() + 𝜇 5𝑟 -(20)
FEM Analys
FEM analys, även kallat Finita Elementmetoden är en numerisk analysmetod som används för att lösa stora matematiska problem. FEM kan användas vid beräkningar inom mekanisk konstruktion eller flödesteknik.
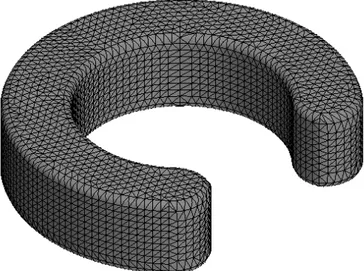
I FEM anses lösningsregionen vara uppbyggt av många små sammanhängande delregioner som kallas för element. Eftersom det är väldigt svårt att beräkna beteendet i en komplicerad modell under en last, delas modellen upp i flera mindre sammanhängande delar, som kallas mesh, se figur 10. I varje sådan del eller element, approximeras en lämplig lösning och delens totala tillstånd i jämvikt härleds. Genom att tillfredsställa dessa villkor fås en tillräcklig lösning för delens beteende. [3]
Teoretiskt ramverk
Figur 10. FEM mesh av en C formad Ring.
Elementen som själva materiens kropp eller kontinuumet är uppbyggda utav anses vara sammankopplade vid specifika punkter som kallas noder. Dessa noder ligger på elementgränserna där de intilliggande elementen ansluts. På grund av att den faktiska variationen av fältvariabeln (tex, förflyttning, spänning, temperatur, hastighet eller tryck) inte är känd, antas det att variationen i de finita elementen approximeras av en simpel funktion. Dessa funktioner, även kallat interpolationsmodeller, definieras utav de fältvärden som noderna har. Därför blir nodernas värden av fältvariabeln det nya okända när fältekvationer, som tex. jämviktsekvationer, för hela kontinuum skrivs. Genom att lösa finita elementekvationer beräknas nodernas värden av fältvariabeln. När dessa är kända definieras fältvariabeln genom hela sammansättningen av element med hjälp av approximationsfunktionerna. [3]
Plasticitet och elasticitet
Plasticitet innebär att ett material utsätts för en kraft som gör att materialet deformeras på ett sådant vis att det inte går tillbaka till sitt ursprungsläge när kraften avtar.
Elasticitet är således att materialet deformeras, men på ett sådant vis att materialet återvänder till ursprungsläget när kraften minskas eller tas bort. [5]
Metod
3 Metod
Koppling mellan frågeställningar och metod
1. Vilka krafter uppstår i bordet när veven når sitt maximala vridmoment?
För att besvara den första frågeställningen har metoder rörande moduleringsprogram och intervju beskrivits. Detta för att få en bredare kunskap inom dessa områden.
2. Hur skall ett stopp utformas för att förhindra bordet att höjas över det översta tänkta läget?
För att besvara den andra frågeställningen har metoder rörande
produktutvecklingsprocessen och 3D-modellering beskrivits. Detta för att få en förståelse kring svaret av den andra frågeställningen.
3. Lyckas det konstruerade stoppet förhindra att bordet höjs utöver det översta tänkta läge?
För att besvara den tredje frågeställningen har metoder rörande simulering och testmetoder beskrivits. Detta för att kunna få förståelse kring genomförandet rörande den tredje frågeställning.
Frågeställning Metod 1 2 3 SolidWorks x x x Frågemetoden x x MATLAB x 3D-printing x
Test av Höj- och sänkbart bord. x
Kravspecifikation x
Koncept och Produktframtagning x
Brainstorming x
Konceptsållning x
Simulering i SolidWorks x
Metod
Validitet och reliabilitet
Mycket utav besluttagandet utmed rapporten har gjorts med hjälp av diskussioner med företagets anställda samt handledare och lärare på Jönköpings Tekniska Högskola. Koncepten har, med hjälp av företages konstruktörer, utvecklats på ett sådant vis att koncepten är så relevanta för problemet som möjligt. Med hjälp av deras kompetens har studiens trovärdighet ökat. Även lärares expertis inom områden som konstruktion, maskinelement och simulation har bidragit till ökad trovärdighet. Insamlingen utav teorier och fakta har hämtats från flera olika källtyper så som böcker, hemsidor, publicerade texter samt samtal med personer med expertis inom området. På detta vis har arbetets metodik genomförts med god relevans.
Frågemetoden
För att få fram fakta och synpunkter som kan bilda underlag för en slutgiltig beskrivning av ett problem kan frågemetoden användas. Metoden går ut på att få ett antal frågeställningar besvarade. De svar som fås bör vara faktabetonade, objektiva och distinkta för att maximera hjälpen. [7]
3D-printing
3D-printing är ett begrep som innefattar flera tekniker gällande 3D-printning. Kvalitén på 3D-printrar skiljer sig mycket. Det finns 3D-printrar som kostar allt ifrån några tusen i inköp till de som kostar hundra tusentals kronor. Det som skiljer dessa printrarna från varandra är dels kvalitén på själva printern, men även den teknik som de använder. Den vanligaste sortens printer kan printa ABS och PLA plast bland annat. Dyrare printrar kan använda sig av en teknik som kallas SLS. De förstnämnda, förlitar sig på att ett munstycke sprutar ut plast i små strängar som tillsammans skapar en hel struktur. SLS teknik använder istället lager med material som sedan värms upp på just de specifika delarna som önskas tillhöra produkten som skrivs ut. På så vis får de printade delarna från SLS printern oftast mycket bättre finish än de strängbaserade 3D-printarna. 3D-Printning gör det även möjligt att 3D-printa i andra material än plast. Material som aluminium och titan kan printas. Detta på liknande sätt som SLS, men ofta kostsamt och mer tidskrävande.
Test av Höj och sänkbart bord
Vid konstruerandet av höj och sänkbara bord är det flera egenskaper som spelar stor roll. För att uppnå en produkt som är tillräckligt bra för konsumenterna är det flera aspekter på bordet som måste testas.
• Bordet ska vara tillräckligt stabilt i högsta läget.
• Höj och sänk funktionen ska fungera ett visst antal cyklar under en viss vikt beroende på modell.
Metod
• El-motorer eller fysiska vev system ska kunna utsättas för en påfrestning som motsvarar en uppskattad livslängd.
Alla bord som tillverkas har en maximal last som inte bör överskridas. Denna last varierar mellan alla olika bord som säljs. En av anledningarna till att olika bord har varierande krav är att borden säljs av olika anledningar. Vilka krav ett bord får är oftast baserat på i vilket sammanhang bordet är tänkt att säljas. Ett designbord kan få lägre krav på stabilitet om designen sätts i fokus. Lika så för andra egenskaper.
För att testa allt, genomförs flera tester på varje produkt för att fastställa önskat resultat. Stabilitet testas genom att placera en bordsskiva på själva bordskonstruktionen. Vikter placeras på olika ställen på bordsskivan. Om bordet visar täcken på att välta eller andra oönskade egenskaper, kommer en mindre bordsskiva att testas. Detta upprepas för att fastslå vilka bordsben och bordsskivor som ska användas ihop.
Ofta när en ny produkt utvecklas, är det redan bestämt vilka bordskivor bordet ska klara av, vilket i sin tur sätter krav på bordsbenens fysiska dimensioner.
För test av det höj och sänkbara kraftöverförings-systemet som innefattar axlar kugghjul och motor, placeras viktpåsar som väger 10 kg styck på bordet med jämna mellanrum för att sedan koppla in ett särskilt testprogram som får bordet att höjas och sänkas med jämna mellanrum. Programmet körs på ett sådant vis att bordet utsätts för realistiska påfrestningar utan att skapa onödig värmeutveckling eller påfrestningar på de elektriska komponenterna. Detta skapar en bild av vad bordet kommer att utsättas för i sin produkt-livscykel samt visar vad producenten kan lova sina kunder för egenskaper. [9]
Kravspecifikation
En kravspecifikation används för att sammanställa alla de egenskaper som produkten skall uppfylla för att lösa problemet produkten skall lösa. Dessa egenskaper punktas upp som krav i en kravspecifikation. Kraven skall vara specifika och mätbara samt skrivas i skall-form. Kravspecifikationen innehåller även information om hur kraven skall testas och vilka resultat som är godkänt. [7]
3.6.1 MoSCoW
MoSCoW metoden har fyra nivåer av kravspecifikationer, Must have, Should have, Could have och Won’t have. Dessa fyra nivåer är anledningen till dels namnet, men även hur viktiga de är för produkten/projektets egenskaper.
Som namnen avslöjar är Must have de krav som är kritiska inom den tidsram som är satt för att slutresultatet skall bli lyckat. Should have innebär de krav som är viktiga att ha med, men inte nödvändiga för att slutresultatet skall bli lyckat. Could have är de krav som skulle kunna vara med i slutresultatet om det går att lösa på ett enkelt och effektivt vis. Won’t have är de krav som inte kommer att finnas med i slutresultatet. Att definiera alla krav är viktigt att göra för att få en tidig överblick för produkten/projektet, och på så vis kunna planera projektet bra från första början. [13]
Metod
Koncept och Produktframtagning.
För att skapa en produkt eller ett koncept till en produkt inom industriell tillverkning, krävs det både en idé och en skiss på idén. För att effektivisera denna process kan den göras på flera olika vis, men oftast sker någon form av parallell utveckling av flera koncept som sedan slutar i ett till tre slutkoncept.
Produkten genomgår olika faser så som idé, tidigt koncept, koncept, slutkoncept och produkt.
Vid utveckling av en produkt som skall tillverkas, kommer det i utvecklingen tas hänsyn till följande faser:
• Konstruktionsfas • Processberedningsfas • Operationsberedningsfas • Tillverkningsfas
Hur olika företag använder dessa faser varierar. Fler faser kan förekomma i produktframtagningsprojekt.
Konstruktionsfasen, som denna rapport till stor del handlar om, innefattar allt från idé till konstruktionsritning på produkt. Saker som CAD-modeller och beräkningar inom metoder som använder sig av finita elementmetoder (FEM) kan förekomma. [5]
Brainstorming
Brainstorming kräver stor förståelse för problemet och produkten. Med hjälp av krav och begränsningar kan resultatet av brainstorming bli bättre, men är egentligen inget måste för att hitta tänkbara lösningar på problemet. Många gånger är så få begränsningar som möjligt att föredra, detta eftersom det inte ska hämma kreativa idéer som inte nödvändigtvis fungerar, men som kan leda till något som gör det.
I vilken del av projektet som brainstorming görs, kan variera i förhållande till vad för slags arbete som ska genomföras. Brainstorming kan förekomma löpande från start, eller vid ett specifikt tillfälle som är endast tänkt för idégenerering och problemlösning. Vad som funkar bäst är oftast varierande beroende på individen och problemet som ska lösas.[6]
Metod
Konceptsållning
Sållning görs för att utvärdera och bestämma vilka koncept som ska vidareutvecklas. För att få ett så oberoende svar som möjligt, finns det flera matriser som kan användas för att rangordna de olika koncepten. Några exempel på matriser för sållning är QFD, GoNoGo, Pughs samt en fokusgrupp.
Med en fokusgrupp är snarare målet att få fram alla för och nackdelar till koncepten för att sen väga dessa i en större helhetsbild med individers åsikter snarare än ett siffersystem.
I många fall kan matriser skapa en bra bild som kan leda till stor förståelse angående problemet, som i förlängningen kan skapa förståelse för fokusgruppen. [6]
3.9.1 Pughs Beslutsmatris
Pughs matris är utvecklad av Stuart Pugh år 1980 och är en beslutsmatris som skall hjälpa till att utvärdera de koncept som genererats. I matrisen läggs valskriterierna och de alternativa lösningarna in, samt en referenslösning. I princip kan vilken som helst av de alternativa lösningarna läggas in som referens, men oftast brukar en redan existerande lösning väljas. Därefter jämförs varje lösningsalternativ med referensalternativet. Detta görs på så sätt att varje alternativlösning bestäms som antingen bättre än, lika bra som, eller sämre än referensalternativet för alla valskriterier. Resultatet av matrisen är summan av varje alternativs bedömningar. [7]
3.9.2 Fokusgrupp
För att visa på egenskaper som är svårt att mäta med kravspecifikationer och siffror, kan en fokusgrupp tillsättas. En fokusgrupp fungerar på så vis att den kan bestå av ett antal individer som är mer eller mindre bekanta med problemet. Individerna kan ha anknytning till andra projekt som rör produkten, men detta är inte alltid nödvändigt. Beslutshavare kan på så vis bli informerade om utförda matris-utförande, och sedan ta beslut efter erhållna argument.
För att spegla en större grupp människor kan en fokusgrupp användas för att få variation i frågor. Detta är ett bra sätt att få en bred förståelse för den relation som oliksinnade individer har för en produkt.
SolidWorks
SolidWorks är ett CAD program som gör det möjligt att skapa 2D och 3D ritningar. Programmet gör det möjligt att bygga ihop flera 3D ritningar till en fungerade modell med hjälp av en del av programmet som heter Assembly. På så vis kan mekaniska egenskaper analyseras i 3D miljö utan att tillverkas rent fysiskt.[8]
Metod
Simulering i SolidWorks
SolidWorks simulations är en kommersiell implementation av FEM som kan lösa beräkningar så som förflyttning, spänningar, naturliga frekvenser, vibration, knäckning, värmeöverföring, osv. För att börja en simulering krävs en CAD-modell, antingen som part eller en hel assembly. När CAD-modellen är framtagen måste materialegenskaper, laster och begränsningar definieras. Därefter måste, som vid alla FEM beräkningar, de finita elementen definieras på modellen vilket kallas meshning, se figur 10. När dessa steg är definierade kan programmet beräkna ut det resultat som eftersträvas med hjälp av finita elementberäkningar. [4]
I SolidWorks kan de finita elementen som genereras vid meshning antingen vara i första eller andra gradens element. Första gradens element betyder att elementen är linjär och elementgränserna är raka, medan andra gradens element betyder att elementgränserna kan antingen vara raka eller böjda. [3]
För att få en approximation som är närmare det verkliga resultatet kan det rutnät som skapats göras finare. Detta menas med att elementen som skapats blir mindre och flera element kan skapas på samma yta. Eftersom flera element finns, finns även flera noder och flera värden beräknas. Detta ökar precisionen av det svar som söks. Men problemet som uppstår vid förfining av mesh är storleken av problemet. I vissa fall, vid komplicerade modeller, blir den mängd element som skapas för många och simuleringen kan ta för lång tid att utföras. Därför är det viktigt att skapa en mesh som har ett tillräckligt fint rutnät för det önskade resultatet. [3]
MATLAB
MATLAB är ett datorprogram och programmeringsspråk tillverkat utav företaget MathWorks. Programmet används för iterativa analyser och designprocesser där programmeringsspråket främst är interpreterande där alla variabler i språket är matriser. Detta program används flitigt utav ingenjörer för att göra avancerade beräkningar och analyser. [14]
Genomförande och resultat
4 Genomförande och resultat
Beräkningar
För att kunna veta hur lösningarna till problemet skall konstrueras och vart de skall placeras i systemet, gjordes beräkningar på det befintliga systemet som ROL Ergos vev-bord har. För att underlätta beräkningarna behölls måtten i mm vilket resulterade i att momenten beskrivs i Nmm. Dessa värden omvandlas däremot vid framtagandet utav resultat för att få resultat i Nm.
Alla beräkningar som beskrivs i följande avsnitt är beräknade i programmet MATLAB. För att se beräkningarna se bilaga 4 där MATLAB kod är presenterad.
4.1.1 Vev-bordets system
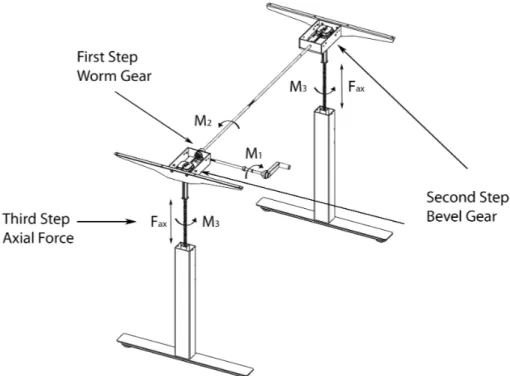
För att besvara på frågeställning 1 ställdes bordets vev system schematiskt upp för att tydligt definiera systemets ingående steg. Då systemet innehåller två kuggväxlar som förändrar det ingående momentet och beräkningar för axialkraft i benen krävs, delades systemet upp i tre olika steg, se figur 11.
1. Ändring av moment från vev till horisontell stång med snäckväxel.
2. Ändring av moment från horisontell stång till axial skruvstång med vinkelväxel. 3. Omvandling av vridmoment till axial kraft i benen.
Genomförande och resultat
För att besvara på frågeställning 1, som strävar efter att utreda krafterna som uppstår i vevbordets stativ när vevens vridmomentspärr når sin maxgräns, måste beräkningar på alla tre steg göras. Detta på grund av förändringen av det ingående momentet i veven till den vertikala stången i benen.
4.1.2 Beräkningar steg 1
För att kunna göra en graf av de resultat som tas fram utmed hela systemet har friktionskoefficienten i snäckväxeln satts som okänd. Detta ger resultat som varierar beroende på värdet av friktionskoefficienten och en tydligare bild av krafterna kan visualiseras.
I systemets första steg används en snäckväxel med en utväxling på 3:1 för att öka det ingående momentet från veven. Snäckväxeln används på de mekaniska höj- och sänkbara borden för att kunna överföra moment ifrån veven till den längsgående axeln kopplat till båda benens växlar.
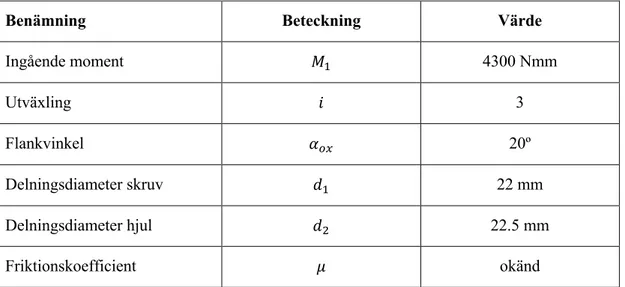
Eftersom en lösning skall tas fram, utan att ändra på delar och produkter som används på bordet idag, gjordes beräkningar på den befintliga snäckväxeln och dess parametrar. De parametrar som användes vid beräkningen:
Benämning Beteckning Värde
Ingående moment 𝑀! 4300 Nmm Utväxling 𝑖 3 Flankvinkel 𝛼"# 20º Delningsdiameter skruv 𝑑! 22 mm Delningsdiameter hjul 𝑑$ 22.5 mm Friktionskoefficient 𝜇 okänd
Tabell 3. Befintlig snäckväxelns parametrar.
För att beräkna det utgående momentet krävs det att verkningsgraden 𝜂 hos snäckväxeln beräknas. Detta kan göras genom att använda stigningsvinkeln 𝛾% och friktionsvinkeln 𝜌′. Stigningsvinkeln beräknas med hjälp av 𝑑%, 𝑑& och 𝑖 och blir ca. 18.8º, se ekv. 7. Friktionsvinkeln räknas ut med friktionskoefficienten 𝜇 & flanknormalen 𝛼", ekv. 9, där flanknormalen 𝛼" räknas ut med 𝛾% & 𝛼*+, ekv. 8, vilket resulteras i en vinkel på
ca 19º. Med stigningsvinkeln och friktionsvinkeln kan verkningsgraden skrivas ut, se ekv. 5.
Med ekvationen för verkningsgraden, ekv. 4, kan det utgående momentet 𝑀& tas fram
Genomförande och resultat
Graf 1. Snäckväxelns utgående moment beroende på friktionskoefficienten.
Med värdet på snäckväxelns utgående moment 𝑀& på den vertikala stången är uträkningarna för steg ett klara. Detta värde kan vidare föras in i uträkningarna för det andra steget.
4.1.3 Beräkningar steg 2
I det andra steget används en konisk kuggväxel för att öka det ingående momentet den horisontella stången påverkar växeln till den axiala gängstången i benet. På grund av att den horisontella stången är kopplat till två koniska kuggväxlar delas det totala momentet upp på bägge kuggväxlarna. Därför blir det ingående momentet halverat vid beräkning vid en av kuggväxlarna. För att beräkna det utgående momentet används följande parametrar.
Benämning Beteckning Värde
Ingående moment 𝑀$⁄ 2 Beroende på 𝜇 (Nmm)
Modul 𝑚 1,5
Kuggtal lilla kugghjulet 𝑧! 15 st
Kuggtal stora kugghjulet 𝑧$ 30 st
Konlängd lilla kugghjulet 𝑅%! 25.47 mm
Konlängd stora kugghjulet 𝑅%$ 25.02 mm
Genomförande och resultat
Kuggbredd stora kugghjulet 𝑏$ 8.66 mm
Tabell 4. Parametrar för konisk växel.
Med kugghjulets utväxling kan delningskonvinkeln hos den koniska kuggväxelns bägge kugghjul räknas ut, se ekv. 12, vilket resulterar i att 𝛿% = 26,6° & 𝛿& = 63,4°. Referenskonsvinkeln används vid uträkning av periferikraften hos det lilla kugghjulet, som vidare användas vid uträkning av det utgående momentet hos det stora kugghjulet. Med det ingående momentet 𝑀&, samt det lilla kugghjulets konlängd 𝑅.%, kuggbredd
𝑏% och delningskonvinkel 𝛿% kan periferikraften 𝐹,- räknas ut, se ekv 13. Detta värde används därefter för att beräkna det utgående momentet, där periferikraften 𝐹,- samt det stora kugghjulets konlängd 𝑅.&, kuggbredd 𝑏& och referenskonvinkel 𝛾& används,
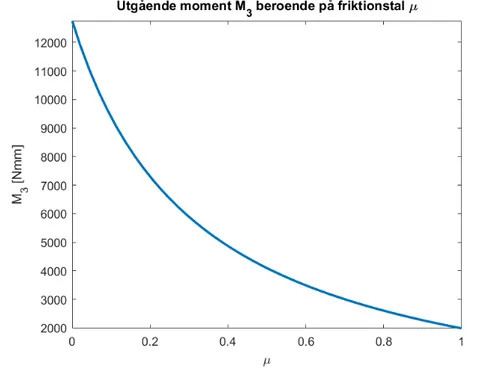
se ekv. 14. Detta värde är, på grund av att det ingående momentet 𝑀& är en funktion beroende på snäckväxelns friktionskoefficient 𝜇, en ekvation som kan plottas som en graf, se graf 2.
Graf 2. Snedväxelns
utgående moment beroende på snäckväxelns friktionstal µ.
Efter uträkningen av det utgående momentet är beräkningarna för steg två avklarade. Värdet som tagits fram i steg två används vidare i steg 3 för att beräkna den axiala kraft som uppstår i benen.
Genomförande och resultat
4.1.4 Beräkningar steg 3
Vid beräkningarna i detta steg används parametrar för den gängstång som är standard i alla ROL Ergos höj och sänkbara bord. Dessa parametrar kan hittas i tabell nr.3:
Benämning Beteckning Värde
Moment i skruvstången 𝑀$*$ Tas från steg 2 (Nmm)
Skruvens medelradie 𝑅& 5.21 mm
Anliggningens medelradie 𝑅- 6.03 mm
Avstånd mellan två gängor 𝑃 4 mm
Antal ingångar 𝑍 5
Gängans Profilvinkel 𝛼 38°
Friktionskoefficienten mellan skruv och gänga
𝜇& 0.15
Friktionskoefficienten för underlagsfriktionen. (Skruv/mutter – underlag)
𝜇5 0.2
Stigning Skruven 𝑃& (𝑃 𝑍) = 20 𝑚𝑚
Gängans halva profilvinkel
𝛼& 𝛼 / 2 = 19°
Tabell 5. Parametrar för skruvstång.
För att beräkna axialkraften kan gängstången ses som en skruv, spindeln en mutter och stoppet som mediet mellan skruvhuvudet och muttern. Om situationen ses på ett sådant sätt kan beräkningar kring skruvförband med ett åtdragande moment användas. Dessa beräkningar kan utföras med hjälp av skruvens och gängans olika parametrar. Utöver friktionen i gängorna finns det friktion mellan skruven och underlaget vilket påverkar momentet vid åtdragning och lossning. Därför betraktas momentet från steg två som det totala momentet (𝑀$*$) som är en summering av åtdragningsmomentet (𝑀å$) och
basmomentet (𝑀567).
I beräkningarna för axialkraft krävs det en friktionskoefficient mellan skruv och gänga samt friktionskoefficient mellan Cmutter-ringen och spindelns gängor. Dessa värden är uppskattade efter diskussion med anställda på ROL Ergo och sätts som 𝜇& = 0.15 & 𝜇5= 0.2.
Genomförande och resultat
Till en början måste Stigningsvinkeln 𝛾 och friktionsvinkeln 𝜌′ beräknas för att användas vid framtagning av axialkraften.
Med hjälp av skruvens stigning 𝑃&, medelradien 𝑅- och 𝜋 beräknas stigningsvinkeln
vilket resulteras i 𝛾 = 31.41°, ekv. 17. Friktionsvinkeln beräknas med friktionskoefficienten 𝜇& och gängans halva profilvinkel 𝛼& vilket resulterar i att friktionsvinkeln 𝜌′ = 9.014°, ekv. 18.
När friktionsvinkeln och stigningsvinkeln är framtagna kan ekvationen för åtdragningsmomentet sättas upp med den axiala kraften som okänd, ekv.19. På samma sätt sätts ekvationen för bas momentet upp där anliggningens medelradie, dvs medelradien mellan skruv/mutter till underlaget, och underlagsfriktion används, ekv. 16. Även i denna ekvation används den okända axialkraften.
Med 𝑀$*$, 𝑀å$ & 𝑀567 beräknas axialkraften, ekv. 20. Nedanför syns resultaten i en
graf där axialkraften 𝐹6+ är beroende utav friktionstalet 𝜇 i snäckväxeln.
Genomförande och resultat
4.1.5 Test av momentspärr
För att få fram ett exakt värde vid de tre stegens olika beräkningar krävdes det att en friktionskoefficient definierades. Genom att testa bordets lyftförmåga kunde en friktionskoefficient tas fram med hjälp av grafen för bordets axiala kraft.
För att få förståelse för hur test utförs på ROL Ergo, intervjuades två anställda på företaget ROL Ergos testlabb. Denna informationen användes senare vid testandet av vev bordets lyftförmåga och vevens momentspärr. Se bilaga 1 för att se frågorna och svaren.
Eftersom den kraft som stoppet skall hålla emot är beroende av den maximala kraft som momentspärren i veven håller för, testades vevens lyftförmåga. För att veta den vikt bordet klarar av att lyfta krävdes ett fysiskt test som innefattade att utsätta bordet för allt mer vikt tills det slutligen gav upp och momentspärren började hoppa. Testet utfördes med standardtest-säckar som ändvänds på ROL Ergo för test. Var och en av säckarna väger 10 kg. Säckarna placerades med jämna mellanrum över hela den övre konstruktionen tills momentspärren slutligen gav vika. Eftersom många faktorer spelar en roll för att testet ska spegla bordets användning hos en kund, är det svårt att sätta en definitiv vikt som får bordet att stanna. Hur väl vev-systemet är ihop-skruvat påverkar verkningsgraden eftersom friktion och kontaktytor ökar och minskar beroende på vinkel som axlar och kugghjul rör sig mot varandra. Vid 200 kg börjar momentspärren hoppa, men inte varje varv. När vikten applicerad på bordet uppnådde 240 kg blev bordet i princip obrukbart när det kommer till att höja det.
Detta resultat visar att den axiala kraft som veven genererar i benen när veven når sitt maximala vridmoment på 4.3 Nm ligger runt 1200 N i vartdera ben. Med detta värde togs en friktionskoefficient fram med hjälp utav Graf 3, där en friktionskoefficient på 0.2 ger en axial kraft på ca 1200 N enligt beräkningarna. Med denna friktionskoefficient kunde vidare moment i systemet beräknas.
Genomförande och resultat
Resultat frågeställning 1
[1] Vilka krafter uppstår i bordet när veven når sitt maximala vridmoment?
För att besvara frågeställning 1 krävdes det att utföra beräkningar utmed vev bordets tre olika steg. Eftersom frågeställningen gäller krafter vid vevens maximala vridmoment på 4.3 Nm gjordes alla beräkningar med detta som utgångsvärde. För att få ett exakt värde att hänvisas till vid kravspecifikation, konceptframtagning och simuleringar sattes en friktionskoefficient i snäckväxeln på 0.2. Detta värde togs fram genom att mäta bordets lyftförmåga och jämföra värdet mot graf 3. Detta visade att en friktionskoefficient på 0.2 utgav en ungefärlig axial kraft på 1200 N vilket motsvarar resultatet av testet.
• Steg 1: I det första steget omvandlades momentet i veven från 4.3Nm till 7.39 Nm i bordets underliggande axel.
• Steg 2: I det andra steget omvandlades momentet i den underliggande axeln till 7.30 Nm i bordets vertikala gängstång.
• Steg 3: I det tredje steget beräknades axialkraften som skruvstången påverkar ett stopp när skruvstången har 7.30 Nm i moment. Axialkraften blev 1253.1 N. Som syns i ovanstående punkter blir momentet i den horisontellt underliggande axeln på bordet och momentet i ett bens gängstång liknande. På grund av detta begränsas inte lösningens position till en specifik position i systemet, utan en lösning kan appliceras både inuti benen samt under bordet.
Med dessa resultat besvaras frågeställning 1 och används vid framtagning av koncept. Några av dessa värden användes vid FEM-beräkningar av framtagna koncept för att säkerställa att koncepten uppnår de satta kraven samt för att svara på frågeställning 3, som behandlar huruvida det konstruerade stoppet lyckas förhindra bordet att höjas utöver det översta tänkta läget.
Konceptframtagning
Efter beräkningar av de krafter som förekommer i bordets befintliga vev-system kunde konceptframtagningen ske. Genom att ha en bra bild över de olika krafterna som uppstår i bordets olika steg kunde idéer tas fram.
4.3.1 Kravspecifikation
För att kunna börja fundera kring lösningar behövdes krav sammanställas. Vid framställningen av kravspecifikationen togs krav fram tillsammans med ROL Ergo för att säkerställa att deras krav skulle uppfyllas. En kravspecifikation gjordes med MoSCoW metoden.
Genomförande och resultat
MoSCoW
Must have Should have Could have Won’t have
Lösningen skall motstå de krafter som uppstår när veven uppnår sitt maximala moment på 4.3 Nm.
Designen skall utformas efter ROL Ergos designspråk.
Enkel montering utav lösning. Använda elektriska komponenter. Bordets slaglängd (470 mm) får ej ändras. Tillverkad i återvunnen plast. Brandsäker. Nuvarande produkters dimensioner får ej ändras. Vevens vridmomentsspärr skall låta mindre. Dimensionen skall
anpassas efter bordet.
Bordets motstånd skall vara lika vid höjning och sänkning. Lösningen skall vara anpassad efter olika stativ.
Tabell 6 Kravspecifikations tabell. 4.3.2 Brainstorming
Genom att studera problemet och alla de påverkande delarna av produkten, skapades en förståelse för vad som kunde lösa problemet och vad som skulle kunna ändras i nuvarande design på bordet. Idéer skapades från början av projektet som testades på konceptnivå. För att försäkras om att alla tänkbara koncept var igenomtänkta, genomfördes ett brainstormings tillfälle där fokus var att komma på så många och bra koncept som möjligt.
Genom att skissa och rita koncept under 5 minuters tid för att sen jämföra resultat kunde många idéer undersökas på kort tid. Processen upprepades ett flertal gånger. Koncepten varierade från simpla till mer avancerade. Med hjälp av uppsatta krav kunde sen de koncept som var helt fel uteslutas.
4.3.3 Koncept efter brainstorming Fjäderstopp.1
Tanken bakom Fjäderstopp.1 är att stoppet ska kunna monteras på ett sådant vis att gängstångens ände kan vara nästan var som helst inne i spindeln. Detta gör det möjligt att ha kvar den nuvarande verkningslängden på 470 mm på bordet.
Genomförande och resultat
Designen består av två plastdetaljer samt en fjäder som tillsammans skapar en enhet som kan placeras på utsidan av spindeln. På gängskruvens ände monteras en bricka för att skapa en yta som kan ta upp kraften som skaps. Brickan fästs med hjälp av ett gängat hål som är borrat i änden.
Stoppet är designat för att två lösningar ska kunna monteras i varje ben, detta föra att skapa symmetri så att gängstången inte tvingas i motsatt riktning. Totalt kommer fyra stopp kunna monters på ett bord (två i varje ben). Detta gör det möjligt att dela hela den faktiska kraften på fyra, vilket i teorin skulle göra att varje stopp skulle endast behöva klara en fjärdedel av kraften. Detta skapar bra förutsättningar för att använda plast som tillverkningsmaterial.
C-Ring.1
C-Ring.1 är ett koncept på ett stopp som befinner sig på gängstången. Tanken med utformningen av stoppet är att ett 3 mm brett spår fräses på gängstången vid önskad längd (470 mm). En C-ring kommer sedan passa i detta spår. C-ringen har en Fyrkantig profil, vilket kommer i sin tur göra att när gängstången och C-ringen kommer upp till Gäng-husets gänga, kommer de två gängorna inte kunna gänga vidare i varandra. Ankare.1
Ankare.1 fästs längst ner på gängstången. En snurrad lina kommer sedan hänga ner för att sedan sitta fast i en horisontell plastbit (ett ankare). Eftersom gängstångens nedre del måste stannas i mitten av Skruvhuset för att uppnå önskad verkningslängd. Den snurrade linan är lika lång som avståndet från spindelns nederkant, detta gör så att ankaret kommer ta i nederkant exakt när bordsskivan har färdats 470mm i höjdled. Utväxling.1
Utväxling.1 fungerar som en fristående del som ska monteras på en axel någonstans på bordet. Tanken är att mekaniskt kunna räkna antal varv en axel snurrar. Detta görs med hjälp av utväxling. Ett kugghjul på en axel (litet kugghjul) kommer att överföra antalet varv den snurrar till ett annat, större kugghjul (3:1). Detta större kugghjul kommer i sin tur dela en separat axel med ett mindre kugghjul. Detta mindre kugghjul kommer att kopplas till ytterligare ett större kugghjul (3:1). Hela idén bygger på att få 143 varv på axeln (antal varv det tar att höja bordet från minsta till högsta läget) som löper horisontellt under bordet att bli betydligt färre varv. Detta för att kunna kontrollera och stoppa det sista kugghjulet vid exakt rätt ställe mekaniskt. När kugghjulet stannas, kommer hela bordet att stanna.
Konceptet kommer att monteras antingen inne i benets övre del, där elmotorn vanligtvis sitter. Eller i en låda under bordet som är designad efter ROLs designsspråk.
Genomförande och resultat
Draftstoppet.1 bygger på idén om att alla plastdetaljer oftast draftas på något vis. Avsmalningen i den del av spindeln som inte är gängad är även den draftad. Detta betyder att öppningen längst ner är ca 14 mm bred medan den övre biten (innan gängorna börjar) är ca 12 mm. Mella dessa två lägen sker avsmalnandet med lika mycket för varje mm. Tanken med Draftstop.1 är att designa en plugg som sätts på längst ner på gängstången som är exakt den diameter som spindeln är där änden på gängstången önskas stanna.
Vajer.1
Vajern.1 bygger på att fästa en vajer längst ner i bordsbenet som sedan är fäst i änden på gängstången. Längden på vajern kommer att motsvara den längd som den nedre delen av gäng-staven kommer att färdas för att få bordet att höja 470 mm.
Snurra/lina.1
Snurra/lina bygger på idén om att ha en mekanism som fungerar som en automatiskt tillbakadragande sladd-dosa (inte helt olikt den som oftast sitter på en dammsugare). Linans ände kommer festas runt en axel på valfritt ställe på bordet. När axeln snurrar kommer linan snurra runt axeln tills linan tar stopp. Detta kommer leda till att axeln också stannar, som i sin tur gör så att hela bordet stannar. När bordet sen vevas ner kommer linan att automatiskt dras ihop.
Magnetpinne.1
Magnetpinne.1 Bygger på idén med att hjälp av magnetisk kraft kunna påverka en sprint av något slag. Tanken är att placera en magnet längst ner på gängstången. När den befinner sig i rätt läge kommer den att i sin tur påverka en sprint som är monterad i ett hörn av spindeln. Via ett hål i spindeln kommer sprinten ut och blir stoppad av en bricka som är monterad längst ner på gängstången. (inte helt olikt Fjäderstopp.1)
Mutterglid.1
Mutterglid.1 bygger på att mekaniskt kunna räkna antal varv på den underliggande horisontella axeln under bordsskivan. Genom att förse en del av axeln med gängor kommer det bli möjligt att fästa en plåtbit vinkelrätt mot bordsskivan som fungerar som en mutter på axeln. Plåtbiten har ett hål som är gängat i mitten av plåtbiten, och har en fyrkantsprofil till kanter. Med hjälp av fyrkantsprofilen kommer plåtbiten att röra sig i sidled istället för att snurra när axeln snurrar. Detta för att bordsskivan kommer att hindra plåtbiten att snurra tack vare fyrkantsprofilen. Detta resultera i att när axeln snurrar 20 varv, kommer plåtbiten att snurra motsvarande sträcka i sidled, vilket leder till att antal varv på axeln för att flytta bordskivan 470 mm kan direkt översättas till plåtbitens rörelse i sidled. Två stopp kommer att placeras på utmätta ställen för att hindra plåtbiten att färdas längre än önskad sträcka. Detta kommer få hela bordet att stanna i en riktning.
Genomförande och resultat
4.3.4 Sållning
Genom att undersöka varje koncept på en grundlig nivå kunde vidare utveckling motiveras eftersom vissa koncept visade på bättre resultat än andra. För att avgöra vilka koncept som skulle gå vidare användes en Pughs-matris, se figur 12. Den referenslösning som valdes för att utvärdera alternativlösningarna var den redan befintliga stoppringen som ROL Ergo använder. Matrisen användes för minska antalet lösningar som skulle fortsättas arbetas med i vidareutvecklingen.
Figur 12. Phugs-matris.
För att försäkra ett fullgott resultat, användes en fokusgrupp på ROL Ergo som med hjälp av erfarenhet och insikt i andra projekt, kunde ge rekommendationer om vilka koncept som hade störst potential att leverera bäst resultat. Detta tillsammans med Phugs-matrisen gjorde så att tre koncept kunde väljas för vidareutveckling.
Vidareutveckling
Efter sållning av koncept var det tre koncept som gick vidare, Fjäderstopp, Mutterglid och C-ring. För att bättre få en förståelse över koncepten modulerades koncepten i 3D med hjälp av CAD programmet SolidWorks och prototyper i form av 3D utskrivna modeller gjordes.
4.4.1
Fjäderstopp.I processen där de positiva egenskaperna hos Fjäderstopp skulle verifieras, var SolidWorks det mest använda verktyget.
Genomförande och resultat
Med hjälp av CAD-modeller kunde konceptet utformas på plats inne i bordet, på så vis kunde flera åtgärder göras före konceptet skulle byggas i verkligheten. Efter att ha fått önskade mekaniska egenskaper, simulerades rörelser och krafter i SolidWorks för att få en indikation om konceptet var värt att satsa på.
För att kunna utföra ett fysiskt test gjordes fullständiga CAD-ritningar i SolidWorks av konceptet för att sedan 3D-printas. Resterande delar blev handborrade och svarvade på ROL Ergo av standarddelar. Montering skedde i testlabbet på ROL Ergo.
Vidareutveckling
För att minska antal delar för konceptet, började tester för att skapa en ny prototyp utan fjädrar. För att få samma effekt som med fjäder, förlängdes kroppen på detaljen för att på så vis ha mer material som kan böjas. Detta resulterar i att plasten inte utsätts för samma påfrestning.
För att visa på att det är möjligt att få ett elastiskt resultat på detaljen, gjordes simuleringar i SolidWorks som visade på bra förutsättningar.
Begränsningar inom 3D-printad plast (PLA) gjorde så att resultatet inte blev det som var tänkt. Egenskaperna hos PLA-plast skiljer sig från egenskaperna hos till exempel POM-plast. Detta eftersom plasternas elastiska egenskaper inte är de samma.
Istället för att Fjäderstoppet böjdes till önskat läge för att sedan återvända till ursprungsläget, inträffade en plastisk deformation på det svagaste stället som i sin tur led till att detaljen gick sönder. Samma test genomfördes flera gånger, med liknande resultat.
Konceptet verkade fortfarande lovande, men krävde betydligt mer utvecklingstid. Detta i kombination av brist på förutsättningar att göra det i rätt sorts plast, gjorde så att konceptet lades ned.
4.4.2
MutterglidFör att verifiera idén med konceptets stoppfunktion utfördes ett enkelt test. Genom att rotera en gängstång samtidigt som mutterns rotation förhindrades, testades idéen med en mutter som förflyttas längs gängstången. För att vidare testa om muttern lyckas förhindra gängstångens rotation om muttern kommer i kontakt med ett stopp, monterades två stopp på gängstången där muttern var placerad i mitten. Med hjälp av en skruvdragare roterades gängstången och muttern förflyttade sig i sidled. När muttern nådde ett stopp förhindrade stoppet mutterns rörelse längs gängstången samtidigt som mutterns rotation förhindrades. Detta resulterade i att gängstångens rotation förhindrades, vilket antydde på att principen fungerade. Efter detta enkla test konstruerades en CAD-modell utav konceptet.



![Figur 7. Typiskt skruvförband med verkande krafter, [2, sid 63].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4551612.115940/17.892.289.606.126.377/figur-typiskt-skruvförband-verkande-krafter-sid.webp)