15 hp, grundnivå 300
Sammanfattning
Examensarbetet gick ut på att konstruera ett robotlås. Ett robotlås håller fast roboten i sitt transport/utskjutningsrör till det är dags för roboten att avfyras. Det första som gjordes var att förutsättningslöst försöka komma på så många grundidéer som möjligt. Efter detta togs de krav vi hade fått med. Dessa bestod av mått- krafts- tids- och miljökrav. Med dessa krav i beräkningarna togs det fram fyra kompletta CAD-modeller, varav en av dessa modeller utfördes i två versioner. Två koncept som baserades på att en hake roterar runt en axel samt två koncept där ett låsstift rör sig linjärt i ett spår. En utvärdering gjordes av dessa fem alternativ samt det befintliga låset.
Resultatet visade att endast en av varianterna är bättre än det befintliga låset. Dock varierar styrkor och svagheter mellan alternativen.
Abstract
The subject of the thesis work was to construct a missile lock. The purpose of a missile lock is to hold the missile in its launch tube until it’s about to be fired. The first subject was to develop basic ideas without considering any performance specifications. When that was done, the specifications for space, environment, speed and forces were taken into account. Including these specifications in the calculations, four complete CAD-models were produced. Two concepts are based on a hatch rotating around a shaft and two other concepts are based on a locking pin moving linearly in a track. One concept was also included in a second version since simplifications could be made. An evaluation was made with these five alternatives and the existing missile lock. The results showed that only one concept was better than the existing lock. There are however variations where the different concepts work best.
Datum: 2010/03/11 Utfört vid:
SAAB Bofors Dynamics Handledare vid MdH:
Gustaf Enebog
Handledare vid SAAB Bofors Dynamics: Per-Erik Lilja / Sebastian Hällgren Examinator:
Gustaf Enebog
Karlskoga, mars 2010
Innehåll
1 INLEDNING...1 1.1 BAKGRUND...1 1.2 SYFTE...1 1.3 PROBLEMSTÄLLNING...2 1.4 AVGRÄNSNINGAR...2 2 METODER ...3 2.1 BRAINSTORMING...3 2.2 KONCEPTRITNING...3 2.2.1 Beräkningar ...3 2.3 SIMULERING...3 2.4 PROVNING...4 2.5 BEDÖMNING AV KONCEPT...4 3 RESULTAT ...5 3.1 KONCEPT 1 ...5 3.1.1 Uppbyggnad ...63.1.2 Hållfasthet & Material ...9
3.1.3 Upplåsningsförloppet...10 3.1.4 Vidare Arbete ...12 3.2 KONCEPT 2 ...12 3.2.1 Uppbyggnad ...13 3.2.1.1 Motorn ... 16 3.2.2 Hållfasthet...17 3.2.3 Upplåsningsförloppet...18 3.2.4 Vidare arbete...20 3.3 KONCEPT 3 ...20 3.3.1 Uppbyggnad ...21 3.3.2 Hållfasthet...23 3.3.3 Upplåsningsförloppet...24 3.3.4 Vidare arbete...26 3.4 KONCEPT FYRA...26 3.4.1 Beskrivning...27 3.4.2 Hållfasthet...28 3.4.3 Upplåsningsförloppet...29 3.4.4 Vidare arbete...30 3.5 BEDÖMNING...31 4 DISKUSSION ...32 5 SLUTSATSER ...32 6 REKOMMENDATIONER...33 6.1 BYTE AV BEFINTLIGT LÅS...33 6.2 VIDARE UTVECKLING...33
REFERENSER...34
BILAGA A. BERÄKNINGAR... I BILAGAA.1KONCEPT 1 ... I BILAGAA.2KONCEPT 2 ...XIII BILAGAA.3KONCEPT 3 ...XXVI
BILAGAA.4KONCEPT 4 ... XXXV
BILAGA B. UTVÄRDERINGSTABELLER FÖR KONCEPT ... XLV
BILAGA C. ANALYS AV EFFEKTBEHOV FÖR DRIVANORDNING TILL ROBOTLÅS: ...XLVI
BILAGA D. SIMULERING AV LINJÄRMOTOR...XLIX
BILAGA E. KURVOR ...LIV
BILAGA F. INITIALA IDÉER ...LVI BILAGA F.1SKISSER... LVI BILAGAF.2FÖRKLARADE IDÉER...LXVIII
1 Inledning
1.1 Bakgrund
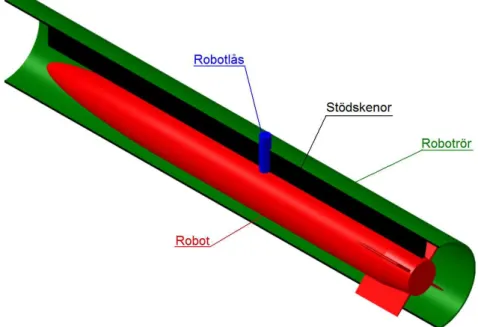
Saab Bofors Dynamics tillverkar pansar- och luftvärnsvapen, bland annat luftvärnssystemet RBS23. I systemet ingår robotar som laddas på en vagn. Roboten levereras i ett Robotrör som fungerar som transportförpackning och
avfyrningslavett. För att roboten inte skall lämna röret vid hantering och laddning på vagn finns ett Robotlåslås som håller fast roboten i röret. Låset skall normalt öppnas ögonblicket innan avfyrning. Hur det kan se ut visas i Figur 1.
1.2 Syfte
Målet med detta examensarbete är att utföra en konceptstudie för att utveckla nya idéer och principer för hur ett robotlås kan vara konstruerat för framtida
vapensystem. Examensarbetet är utformat för att passa RBS23 för att ha en väl definierad plattforma att jobba emot. Till RBS23 finns dock redan ett väl fungerande robotlås.
1.3 Problemställning
Robotlåset skall vara en mekanisk anordning monterat i ett robotrör och hålla roboten på plats i axiell led. På robotlåset ställs ett antal krav:
• Ta upp axiella krafter på upp till 11kN
• Öppning av låset vid samtidig axiell kraft på 1400N • Funktion i temperaturer -40°C till +58°C
• Öppning skall vara genomförd inom 20ms från att startsignal gått • Elektrisk brytare som signalerar öppet lås skall finnas
• Robotlåset skall få plats i ett specificerat utrymme
1.4 Avgränsningar
En avgränsning som sattes av SBD var att låsets skulle konstrueras för att passa RBS23. En tanke som finns är ju annars att konstruktionsprincipen ska kunna utnyttjas i andra tillämpningar. I utvärderingen av koncepten återkom möjligheten för användning utanför RBS23. Det har dock inte påverkat konstruktionerna. Dessutom har det lagts större vikt på att ta fram flera koncept och få dessa väl fungerande än att göra fullständiga analyser och simuleringar av ett enda koncept. De koncept som är gjorda är beräknade i stort sett enbart analytiskt. Detta beror delvis på att vi efter en tid insåg att det inte fanns tid till datoranalyser.
2 Metoder
2.1 Brainstorming
Innan jobbet med att konstruera ett lås inleddes ägnades en del tid åt att ta fram ett stort antal utgångsidéer. Allra först bortsågs från de krav som ställdes på låset för att inte begränsas av dessa. Senare togs dessa krav med för att få fram något att jobba på. Vissa av dessa idéer var inte praktiska att använda eller rent av olämpliga, medan andra bedömdes kunna vara fullt fungerande. En viss uppdelning skedde också mellan metoder att hålla fast roboten och metoder att driva öppningsmekanismen. Många av de idéer som dök upp här kom aldrig med i de koncept som ritades upp men redogörs för i Bilaga D.
2.2 Konceptritning
När det bestämts vilka idéer som kunde vara värt att satsa mer på gjordes CAD-modeller av dessa. Efter en initial inlärningsperiod av CAD-systemet gjordes modeller av koncepten.
2.2.1 Beräkningar
Under tiden som koncepten modellerades gjordes hållfasthetsbedömningar och enkla rörelseberäkningar för att säkerställa att det som ritades hade en rimlig chans att fungera. Dessa beräkningar återfinns i bilagorna A1-A4.
2.3 Simulering
För att verifiera konstruktionerna utan att behöva tillverka dem och göra prov är det lämpligt att göra olika datorsimuleringar av dem. Dels FEM–analyser för hållfasthet
med CAD-systemets inbyggda funktion. Dessutom har det funnits tillgång till program för stelkroppssimulering vilket har kunnat modellera låskonstruktionernas rörelser och visa vilka krafter som uppstår var, hur fort rörelserna sker etc. Detta har dock skett i mycket liten omfattning. Den främsta orsaken härtill är att under ritandet av koncepten har det gjorts många manuella beräkningar för att säkerställa att det som har ritats blivit korrekt. Detta innebar dels att det är ganska liten osäkerhet av hur låsen beter sig och därmed minskat behovet av sådana simuleringar. Det betyder också att tiden tillgänglig för sådana simuleringar varit begränsad.
2.4 Provning
Praktiska prov har inte genomförts av i stort sett samma anledningar som att datorsimuleringar ej har utförts.
2.5 Bedömning av koncept
Eftersom vi nu har fyra fungerande koncept ställs det up en tabell på olika prestanda för koncepten, vilka bedöms utifrån hur bra konceptet presterar i just den punkten och hur viktigt detta är. Om dessa kriterier även ställs upp för den befintliga
konstruktionen kan man få någon form av mått på vilken vinst man får av att byta ut befintligt lås. Koncepten har i varje punkt fått omdömet dåligt, mindre bra, bra och mycket bra, representerade numeriskt med talen 1 (dåligt) till 4 (mycket bra). Omdömena är också viktade så att ett omdöme i ett betydelsefullt kriterie har större inverkan än ett mindre betydelsefullt.
3 Resultat
I denna sektion har endast vissa beräkningsresultat redovisats. De kompletta beräkningarna återfinns i bilaga A.
3.1 Koncept 1
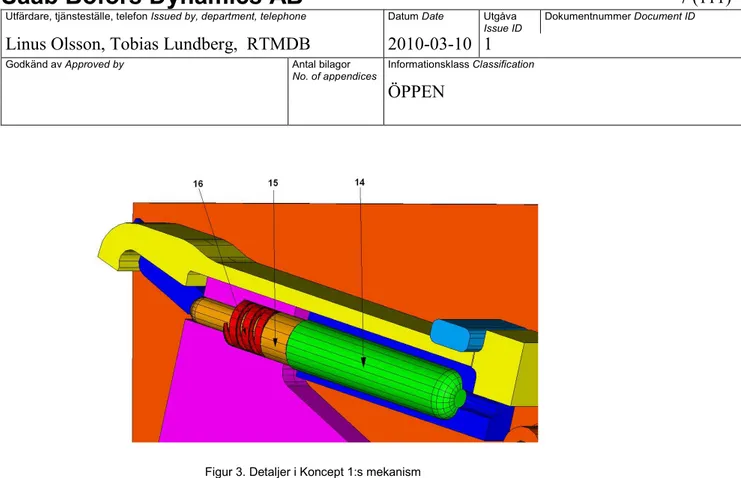
Detta koncept har för avsikt att ha minsta möjliga antal rörliga delar och minsta möjliga mängd glidande ytor. Målsättningen är ett enkelt lås med hög tillförlitlighet. När en spärr för att förhindra oavsiktlig öppning av låset lades till ökade dock komplexiteten. Med vissa förutsättningar kan dock denna spärr ersättas av en enkel fjäder eller skjuvstift, vilket gör konstruktionen enklare än här beskrivet. Figur 2 och 3 visar delarna som utgör koncept 1.
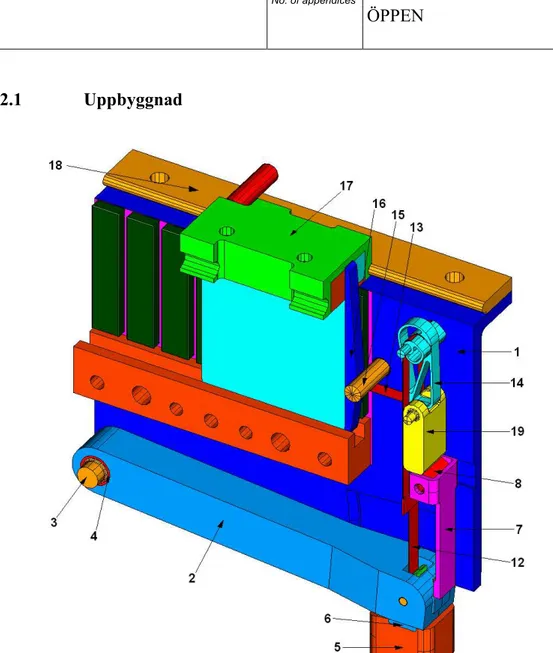
3.1.1 Uppbyggnad
Figur 3. Detaljer i Koncept 1:s mekanism Låset består av följande delar:
1. Ramar (endast den ena är med på bilden) som är interface mot röret och monteringspunkt för låsets beståndsdelar.
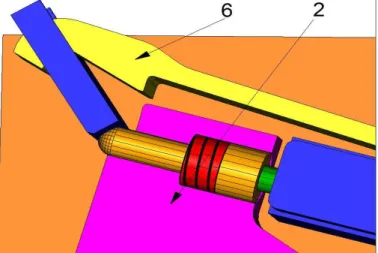
2. Haken. Låsets huvuddel som håller i roboten. 3. Axel som är lagringspunkt för haken.
4. Två shims (en på varje sida haken) som ser till att haken(2) ligger centrerad mellan ramarna(1) utan att ta i någonstans.
5. Robotfästet där haken(2) går i roboten
6. Spärrarm som skall se till att haken(2) inte kan röra sig om inte motorn(14) driver den.
7. Ett block med dubbel funktion som hållare för motor(14) och stöd för spärren(6). 8. Stöd för spärren(6).
9. Hävarm för spärrmekanismen.
10. Bromssko som skall ta upp hakens(2) rörelseenergi när låset har blivit upplåst. 11. Kontaktbleck för Startmotorblockeringsfunktionen.
13. Monteringsdetaljer för kontaktblecket(11). Består av två isolerbrickor samt en skruv.
14. Pyroteknisk motor som skall driva runt mekanismen 15. Trycke som överför kraft till hävarmen(9).
16. Fjäder som skall tillse spärrmekanismens korrekta funktion.
Spärren(6), hävarmen(9), trycket(15) och fjädern(16) utgör tillsammans
spärrmekanismen som ser till att låset endast öppnar om det påverkas av motorn(14) och inte av accelerationskrafter t.ex. om röret tappas i marken.
Denna förhållandevis komplicerade mekanism behövs eftersom om
friktionskoefficienten är nära noll måste ett skjuvstift vara ganska kraftigt. Om friktionen å andra sidan råkar vara lite större orkar motorn inte att både slå av stiftet och driva upp haken. Om friktionen kan specificeras inom snävare gränser, kan ett skjuvstift vara ett alternativ.
Om friktionskoefficienten kan garanteras över 0,13 kommer friktionen mellan fästet(5) och haken(2) vara tillräcklig för att haken inte ska öppna, oberoende av robotens last på låset. Spärrmekanismen eller ett eventuellt skjuvstift kan då ersättas av en enkel fjäder som håller haken på plats då röret accelereras eller utsätts för stötar.
En kraftberäkning ( I bilaga A.) visar att man klarar sig med mindre än 642N drivkraft i alla lägen. Pyromotorn som används i NLAW ger enligt testprotokoll 1500 N som mest och fortfarande 700N efter 20ms, med reservation för att vi inte vet hur trycket varierar med det utförda slaget. Kurvor i testprotokollen antyder dock pyromotorn har når slutet på slaget och därmed rör sig.
Kontaktytorna mellan fästet i roboten och haken är koniska ut från rörelseriktningen på haken. Pga. detta kan de göras raka, och kommer dessutom att reducera friktionen fort eftersom ytorna avlägsnar sig från varandra.
Axeln(3) är monterad på största möjliga avstånd från robotfästet(5) för att göra minsta möjliga rörelse och därmed ge minsta möjliga motstånd.
Kretskortet är en utmärkt samlingspunkt för kablarna från pyromotorn. Om kortet förses med en kontakt kan denna vara låsets anslutning mot omvärlden. Montering av låset kommer då att innebära nedsänkning och fastskruvning i för låset avsett hålrum och inkoppling av en kontakt.
3.1.2 Hållfasthet & Material
Tabell 1 Nedan anger belastningarna på de olika delarna och vilket material de är lämpliga att tillverkas av.
Tabell 1. Hållfasthet och materialval för Koncept 1.
Detalj
Största
Effektivspänning
(MPa) Material Kommentar
Axel(3) 334 Stål Fjäder(16) 364 Stål Hake(2) 449 Stål Alt. Al Hållare(7) 273 Stål Hävarm(9) 478 Stål Ram(1) 399 Stål
Robotstycke(5) 1171 Stål Last troligen mindre
Spärr(6) 263 Aluminium
Stödblock(8) 187 Stål
Trycke(15) 478 Stål
Haken(2) kan på grund av sin relativt låga last tillverkas i aluminium om man vill hålla masströghetsmomentet nere. Då tröghetskrafterna är mycket små i förhållande till friktionskrafterna är detta troligen inte nödvändigt. Hakan får dock inte
deformera för mycket plastiskt då dess avstånd till bromsskon kommer förändras och uppbromsning ske för tidigt eller för sent.
Robotstycket(5) utsätts för en stor böjlast. En del av denna last kommer att tas upp i robotens struktur, och blir då troligen mycket mindre än beräknat.
Spärrarmen är modellerad för att tillverkas i Aluminium, dels för att reducera rörlig massa, men även för att få en lägre E-modul och därmed minskade
deformationskrafter då den ska deformeras en given sträcka. Att tillverka den tunnare men i ett starkare tunnare material ger dock ännu lägre deformationskrafter. Glasfiberförstärkt material har en mycket hög draghållfasthet men ändå måttlig E-modul. Eftersom spärren bör ha en viss förspänning måste materialet kunna behålla den spänningen under en längre tid vilket man också måste tänka på när man väljer material.
Bromsskon behöver inte, om den tillverkas i lämpligt material med hög friktion, utsättas för en tryckkraft på mer än 2kN. För att få lämpliga bromsegenskaper får bromsskons slutgiltiga geometri anpassas till dess elasticitet.
De delar som inte ingår i tabellen är lågt belastade och/eller väljs på grund av andra kriterier.
De delar som har att göra med låsets elektriska funktioner – kretskort, kontaktbleck och isoleringar – är inte högt belastade vare sig elektriskt eller mekaniskt. Eftersom funktionen skall vara säker efter lång tid i förråd kan det vara högst lämpligt att förgylla kontaktytan på kontaktblecket och de banor på kretskortet den går på. Eftersom kontaktytorna är förgyllda är materialvalet i kontaktblecket elektriskt okritiskt. Kraven blir därför fjädringsegenskaper och hög dämpning av
svängningar(för att reducera kontaktstuds).
Hävarmen och trycket belastas av pyromotorn, men samtliga belastade tvärsnitt har större area än kolvstången på själva motorn. Vissa kontaktytor mellan delarna kan bli aningen mindre under rörelsen, men de ytorna kan tillåtas att deformera och därmed anta en tillräckligt stor area.
3.1.3 Upplåsningsförloppet
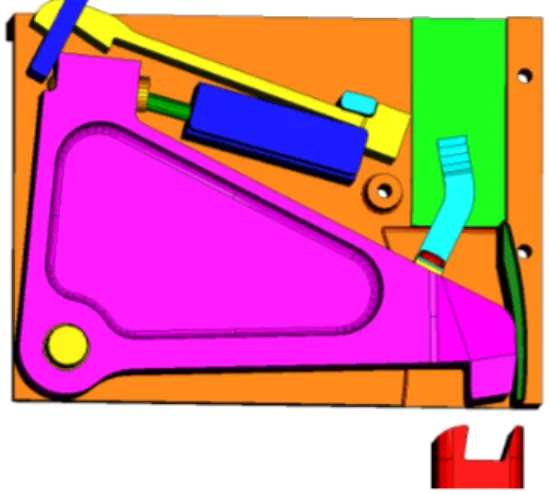
Figur 2,4 och 5 visar låset i olika lägen under upplåsningsförloppet
Innan låset aktiveras kommer det att befinna sig i ett läge så som visas i Figur 2. Vid aktivering sker följande:
1. Tändpuls kommer till pyromotorn(14). 2. Pyromotorn(14) börjar röra på sig.
3a. Trycket(15) pressas in c:a 1,6mm i haken(2), trycker ihop fjädern(16), och påverkar hävarmen(9).
3b. Via hävarmen(9) trycks spärren(6) upp och frigör haken(2). Detta motsvarar läget i figur 3.
4. Haken(2) roterar runt sin axel(3) och lyfter sig från roboten. 5. Pyromotorn(14) når sitt ändläge efter 8mm slag
6. Haken(2) rör sig vidare 1,6mm av fjädern(16):s kraft samt sin egen rörelseenergi.
7. När haken(2) har gått upp helt mellan ramarna kommer kontaktblecket(11) sluta strömkretsen till robotmotorstart. Detta läge syns i figur 4.
8. Haken tar i bromsskon(10) och har nu c:a 10mm sträcka med nära nog linjärt ökande bromskraft tills att den måste stå still.
Om spärren inte behövs utan någon form av fjäder eller skjuvstift räcker istället kommer pyromotorn(6) att direkt trycka på haken. Förloppet blir då aningen enklare i och med att spärrmekanismen försvinner.
3.1.4 Vidare Arbete
Då mekanismen är relativt enkel är det inga större osäkerheter vad gäller dess funktion. Eftersom inga FEM-analyser är gjorda kan det vara ett första steg att göra sådana. Dels för att se om det någonstans är för höga laster, dels kan detta ge om man kan förspänna materialet och på så sätt minska dessa eventuella
spänningskoncentrationer. Ett praktiskt prov för att säkerställa att konceptet inte har några dolda konstruktionsfel bör ju självklart genomföras innan konceptet går vidare till eventuell produktion. För bromsskon är endast specificerat ett material med friktionskoefficient mot haken minst 1,0. Detta material bör även tas fram och provas ut. Spärrmekanismen är den mest komplicerade delen, och som påpekats kanske inte ens nödvändig. Därför bör det undersökas inom vilka värden
friktionskoefficienten kan garanteras och möjligt ersätta spärren med ett skjuvstift eller liknande.
3.2 Koncept 2
Grundidén med detta koncept är att ta fram ett robotlås som inte använder en pyroteknisk drivmotor. En elektrisk drivanordning bedömdes vara det mest rimliga så låset konstruerades kring en sådan.
Principen med en hake som roterar runt en axel är densamma som koncept ett. Med lämpliga materialval och/eller ytbeläggningar kan friktionskoefficienten hållas under 0,2. Dessutom är axlar gjorda med mindre diameter för att minska deras
3.2.1 Uppbyggnad
Figur 7. Detaljer i Koncept 2 Låset består av följande delar, som syns i Figur 6 & 7: 1. Ram där alla delar monteras, och som är fäste mot röret. 2. Armdelen av haken.
3. Axel som fungerar som lagring för haken(2)
4. Bussning eller lager mellan haken(2) och axeln(3). Anpassningsyta för reduktion av friktion.(Ursprungligen inritad om haken(2) skulle tillverkas i icke-metalliskt material)
5. Block i robot som haken(2) skall greppa i.
6. Krokdelen av haken. Separat del för lastupptagning som fästs i hakens arm(2). 7. Spärrarm för att se till att haken(2) ligger kvar i önskat läge.
8. Distans vars primära funktion är som mutter för de skruvar som håller ihop ramhalvorna(1).
9. Knuffare som förmedlar vajerfästets(11) rörelse till spärren(7). 10. 2mm:s axel som är lagring för vajerfästet(11).
11. Vajerfäste som överför dragkraften i vajern(12) till haken(2) och öppnar spärren(7) i början av rörelsen.
12. Vajer för kraftöverföring mellan Vajerhjul(14) och hake(2). 13. Vajer för kraftöverföring mellan Motor och vajerhjul(14).
14. Vajerhjul som ger en variabel utväxling mellan motor och haken(2) 15. 4mm:s axel som hindrar snedställning av vajern(13) mot motorfästet(16). 16. Fäste där vajern(13) fästs i motorn
17. Lager och infästning av motorn 18. Styrskena för motorn via lagret(17).
19. Accelerationsbroms för att förhindra oavsiktlig upplåsning vid stöt.
Haken är gjord i två separata delar, en arm(1) och en krok(2). Kroken kommer att utsättas för mycket höga laster. Därför tillverkas kroken(2) i hårdmetall och hårdlöds fast i armen(1). Hårdmetall kan förutom att ta upp mycket stora trycklaster ge låga friktionskoefficienter. Kroken är dessutom extremt låg för att snabbt gå ut ur roboten och därmed eliminera den friktionen. Den låga bygghöjden ger dessutom en kort sträcka att dra undan kroken och därmed mindre nödvändig acceleration inom den givna tiden.
Blocket i roboten som haken skall greppa i är även den hårt belastad och bör tillverkas av hårdmetall. Att tillverka en gänga i hårdmetall kan vara olämpligt. Däremot kan ett par skruvar monteras i blocket vid sintringen eller lödas in i efterhand för att skruva fast blocket med mutter från insidan.
För att möjliggöra användandet av en elektrisk drivanordning är två speciella
detaljer införda. Den ena är vajerhjulet som ger en uppväxling av tillgänglig kraft på cirka 16:1 i början av rörelsen för att när kroken gått ur roboten minska till 1:1 så att rörelsen kan ske snabbare.
Den andra detaljen är accelerationsbromsen. Motorn kan inte ge mer kraft än vad den kommer att dra i vajern med om röret skulle utsättas för en acceleration på 1000m/s². Alltså måste någonting till som ser till att låset inte öppnar vid en sådan stöt. Accelerationsbromsen kommer, om den utsätts för en stöt i den riktning som
skulle få låset att öppna, gå emot vajerhjulet och där bromsa vajern(11) och med friktion hindra mekanismen från att röra sig.
För att likaledes hindra haken från att slås upp av stötar finns spärren(3). Den är principmässigt lik spärren i koncept 1 med en mekanism(vajerfästet(5) och
knuffaren(7)) som använder den första bråkdelen av rörelsen för ett öppna spärren. För att detektera att låset har öppnat monteras lysdiod/fotosensor i uttag i ramarna. Så länge haken blockerar ljusstrålen skall start av roboten vara spärrad. När haken är lyft över ljusbarriären blir ljussensorn belyst och startmotorspärren kan öppnas. Om blockeringen av startmotortändsignalen sker enbart med halvledare är tiden för denna rörelse försumbar, och motorn har hela den tillgängliga tiden på sig att låsa upp låset.
3.2.1.1 Motorn
Motorn är en elektrisk linjärmotor, d.v.s. dess rörelse är linjär längs ett spår till skillnad från vanliga roterande motorer. Denna typ av motor var den enda som hittades som överhuvudtaget skulle kunna fungera. Bilaga D visar en
effektberäkning som gjordes för att utröna vilken effekt som krävdes för att driva mekanismen. den beräkningen ger en maxeffekt på mindre än 75W och medeleffekt på c:a 8W. Siffrorna är tagna från hur låset såg ut i ett tidigt stadium, men
förändringarna är delvis baserade på siffrorna ur effektberäkningen. Motorn som används i konceptet är en befintlig motor. En simulering av en
motorkörning med ett av tillverkaren tillhandahållet program visar att motorn klarar av upprepade öppningar av låset utan att överstiga några gränsvärden.
3.2.2 Hållfasthet
Tabellen nedan anger belastningarna på de olika delarna och vilket material de är lämpliga att tillverkas av.
Tabell 2. Hållfasthet och materialval för Koncept 2.
Detalj
Största
Effektivspänning
(MPa) Material Kommentar
Accelerationslås 30 WC-Co Materialval pga. densitet
Axel 856 Stål
Axel 2mm 107 Stål
Axel 4mm 7 Polyamid Radien fast, alt. Metallrör
Gejdrar 8 Stål
Hakens arm 623 Stål
Hakens krok 2200 WC-Co
Knuffare 43 Stål
Ram 924 Stål
Robotkloss 2279 WC-Co
Motorlager 8 Polyamid Alt. Teflonbelagd Al.
Spärr 157 Stål
Vajrar 2640 Glasfiber
Vajerfäste 102 Stål
Vajerhjul 264 Stål
Hårdlödningen som skall förena hakens krok med dess arm kommer att utsättas för en effektivspänning av 246MPa. Detta är ungefär hälften av vad som kan
åstadkommas med en hårdlödningi. På grund av de olika
längdutvidgningskoefficienterna på hårdmetall och stål kommer spänningar att uppstå i delarna med varierande temperatur. Dessa spänningar är dock ganska låga i förhållande till de påförda mekaniska lasterna och inräknade i ovanstående tabell.
3.2.3 Upplåsningsförloppet
Figur 6, 8 & 9 visar låset under olika lägen av upplåsningsförloppet.
Innan rörelsen börjar är låset i det läge som visas i Figur 6.
Figur 9. Koncept 2 upplåst Vid upplåsning sker följande:
1. Motorns drivelektronik får signal och börjar dra motorn.
2a. Motorn drar i vajern(13), vilket får vajerhjulet(14) att rotera och i sin tur dra i vajern(12).
2b. När vajern(12) drar i sitt fäste(11) kommer fästet rotera en aning och via knuffaren(9) trycka ut spärren(7) vilket frigör haken(2).
3. Efter att vajerfästet(11) slagit i väggen i haken(2) kommer haken lyftas ur roboten och in mellan ramarna(1)
4. När haken(2) har gått upp så långt att den går fri från ljusbarriären kommer blockeringen av startmotorsignalen att hävas.
5. Ungefär samtidigt som ljusbarriären öppnas går spärren(7) tillbaka in bakom klacken i haken(2) och förhindrar den från att fall tillbaka ner i roboten.
3.2.4 Vidare arbete
Liksom de övriga koncepten är inga FEM-analyser av hållfasthet och deformationer gjorda, vilket kan vara bra för att avgöra om det uppstår stora spänningar som inte är inräknade här. Eftersom konceptet innehåller många annorlunda lösningar bör dock en djupgående analys göras. En elektrisk drivning har helt annan karakteristik och andra svårigheter att övervinna. Det är då intressant att utröna vilka prestanda en elektrisk konstruktion har i verkliga scenarion.
3.3 Koncept 3
I detta koncept var idén att använda en linjär rörelse för att lösa upp låset. För att överföra kraften från pyromotorn används ett kamspår. Vinkeln på detta spår kan anpassas för att kunna använda konceptet som sådant i många olika tillämpningar.
3.3.1 Uppbyggnad
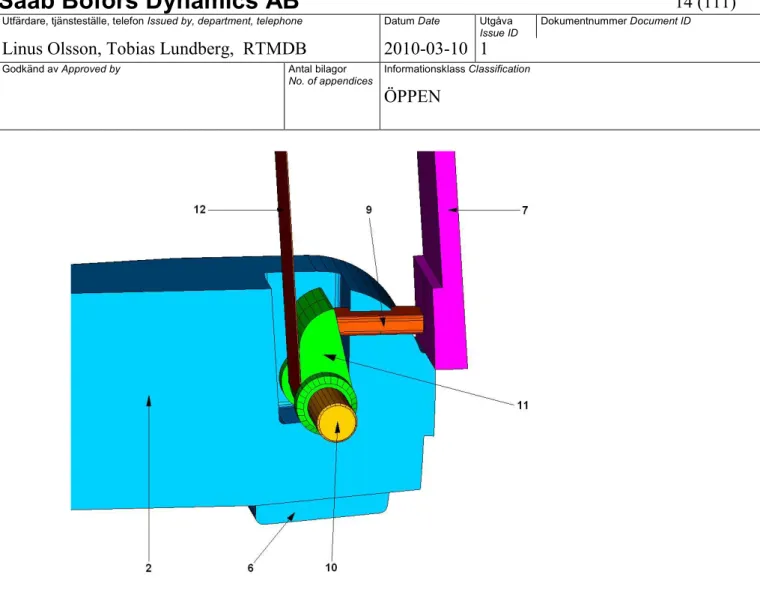
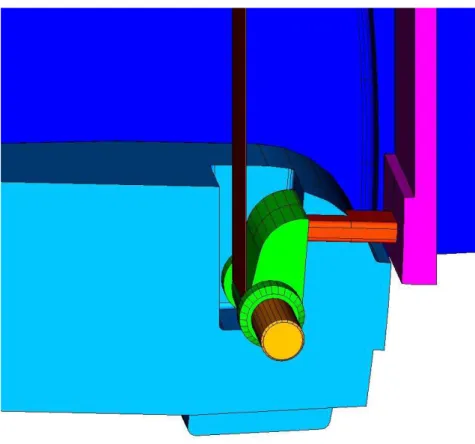
Figur 10. Översikt Koncept 3
De ingående detaljerna i detta koncept är ramen(1) som har flera urfräsningar för olika funktioner. Det som låser fast roboten i röret är ett stift (4). För att låsa upp låset har det valts en pyromotor(2) som sitter fast i en fästkloss (3).
Figur 11. Detaljer i Koncept 3.
För att föra kraften från pyromotorn till stiftet finns dels en pinne(5) och dels en rombliknande detalj(6), enkelt kallad romb. För att låset inte skall riskera att låsas upp av stöt eller tapp av röret finns det två skjuvstift(7) som låser romben mot stiftet. På undersidan av stiftet är det en urfräsning som tillsammans en brytarkonstruktion förhindrar att tändsignal går fram till robotens startmotor innan låset är upplåst. Brytaren består av tre delar, brytarram (11), kontaktplatta (10) och brytarfjäder (9). Genom hålet på undersidan av brytarramen går det upp två ledare, den ena sätts fast på kontaktplattan och den andra på brytarfjädern. Brytarramen måste tillverkas i ett material som inte leder elektricitet alternativt måste det isoleras där de andra delarna av brytarsystemet är monterade.
Figur 12. Brytaren till Koncept 3.
3.3.2 Hållfasthet
Tabell 3. Hållfasthet och materialval för Koncept 3.
Detalj
Största
Effektivspänning
(MPa) Material Kommentar
Motorfäste 190 Stål
Pinne 149 Stål
Ram 648 Stål
Romb 900 Stål
Skjuvstift 42 eg. skjuvlast, då 20*1,2
Stift 1040 Stål
3.3.3 Upplåsningsförloppet
När startsekvensen påbörjats sker som ett andra steg att en tändpuls skickas till pyromotorn(2). Den sitter fast i sitt fäste (3) som i sin tur sitter i en urfräsning i ramen(1).
Figur 13 Låset är låst och spärrat
När pyromotorn tänt kommer den skjuva av skjuvstiften (7). När skjuvstiftet gått av kommer pinnen och romben förflyttas ner till den lutande ytan i stiftets spår. I det här läget kommer rombens trycka mot den lutande ytan i stiftet och stiften börjar lämna roboten.
Figur 14 Låset ska just börja låsa upp
Figur 15 Stiftet är på väg ut
Kraften för att vinkla om kraften från pyromotorn kommer tas upp av dels romben och dels spåret i ramen (8). När pyromotorn närmar sig slutet av sitt slag kommer rombens ändbitar samt även själva stiftet tryckas fast i konor. Att motorn inte nått sitt fulla slag i detta läge borgar för att rombens studs kommer bli minimal. För att stiftet ska stanna kvar utanför roboten även om romben skulle studsa något så är spåret i stiften rakt längst ner.
Figur 16 Romben har gått ner i den raka delen av spåret
3.3.4 Vidare arbete
Stiftet kommer att utsättas för stora laster från både roboten och pyromotorn. Eftersom stiftet dessutom har en avancerad utformning är spänningar svåra att förutse. Därför är en FEM-analys på just denna del kanske viktigare än andra delar i något koncept. Romben är inte någon avancerad geometri, men är väl utsatt för ett mångaxligt spänningstillstånd, så även på denna del är en FEM-analys befogad. Eftersom brytaren är en egen konstruktion bör en noggrann praktisk utprovning ske.
3.4 Koncept fyra
Här var idén att se om det gick att använda en mindre pyromotor än den som används idag. För att ha något att börja med användes den motor som idag sitter i NLAW. Då den är mycket mindre än den som idag sitter i RBS23 kan man sätta den direkt i stiftet och utan kraftväxling låta den driva stiftet ut ur roboten.
3.4.1 Beskrivning
Pyromotorn (4) sitter i detta koncept inuti det låsande stiftet(6) och följer med stiftet i rörelsen.
Figur 17. Översikt koncept 4
1. Ram, med urfräsningar för olika funktioner samt för över alla krafter från roboten till röret
2. Fjäder, för att trycka ner spärrstift
3. Stansplåt, för att bromsa upp stiftet genom att det skärs ett hål i den 4. Stift, låser roboten och överför alla krafter från den till ramen
5. Pyromotor, används som kraftkälla
6. Brytare, förhindrar att startsignal går fram till startmotorn innan låset är upplåst
7. Mothåll, reaktionsstöd för pyromotorn.
8. Spärr, ser till att stiftet inte lämnar roboten även om röret utsätts för en stöt, dessutom förhindrar den är stiftet studsar in i roboten igen efter fullbordat slag. 9. Fäste, detalj som för över kraft från robot till stift.
3.4.2 Hållfasthet
Tabell 4. Hållfasthet och materialval för Koncept 4.
Detalj
Största
Effektivspänning
(MPa) Material Kommentar
Fäste 660
Mothåll 235
Ram 648
välj 800 pga. svårighet att uppskatta yta
Stansplatta 222 Brottgräns
Stift 1040
Stansplattan skall ha så nära den angivna hållfastheten som möjligt, dock aldrig under.
3.4.3 Upplåsningsförloppet
När låset är låst sticker spärren (8) ner i en urfräsning i stiftet(4). Denna urfräsning är tillsammans med spärren dimensionerade så att de håller stiftet på plats även om röret skulle utsättas för en stöt. Däremot kommer det inte att hindra att stiftet rör på sig när man har avfyrat pyromotorn.
Detta åstadkommes genom att vinklar och friktionskoefficienter är dimensionerade så att krafter från pyromotorn får spärren och glipa upp ur sin urfräsning och trycka ihop fjädern.
Figur 19. Koncept 4 i upplåst läge.
När pyromotorn kommer till slutet av sitt slag kommer stiftet ha en hög fart. För att bromsa upp stiftet sitter det en stansplåt (3) i slutet av urfräsningen för stiftet. För att minska den elastiska energin som kan tas upp i stansplåten är änden på stiftet sned. När stiftet bromsats upp helt av stansplåten finns det sannolikt en liten mängd elastisk energi kvar i stansplåten. För att förhindra att den gör så att stiftet åker tillbaka in i roboten finns ytterligare en urfräsning i stiftets ovansida som spärren i detta läge har åkt ner i.
3.4.4 Vidare arbete
Detta koncept har två delar som behöver en noggrann analys. Dels är det
stansplåtens beteende när stiftet deformerar den. På grund av komplicerade plastiska töjningsegenskaper kan det vara mer kostnadseffektivt att utföra fysiska tester än att simulera förloppet. Den andra delen är stiftet. Detta måste tillverkas i flera delar som sedan sammanfogas. Spänningarna som uppstår i stiftet på grund av laster, eller restspänningar från sammanfogningen skall dock inte vara några problem att simulera.
3.5 Bedömning
För varje koncept och det befintliga låset är det uppställt utvärderingstabeller. Konstruktionerna är utvärderade ur ett antal parametrar vardera i grupperna pris, prestanda, tillförlitlighet och testning. Koncepten gavs omdömena dålig, mindre bra, bra eller mycket bra, representerade numeriskt med siffrorna 1-4. de olika kriterierna viktades och summerades för att få att slutgiltigt omdöme.
Tabell 5. Slutresultatet av utvärderingen
Låskonstruktion Betyg Koncept 1 förenklad 3,35 Befintligt Lås 2,87 Koncept 4 2,65 Koncept 1 2,61 Koncept 3 2,55 Koncept 2 2,17
Fullständiga tabeller återfinns i Bilaga B.
Vi ser att inget av de egentliga koncepten är bättre än det befintliga låset till RBS23. Men om koncept ett förenklas så som föreslaget i dess beskrivning – borttagning av de delar som ändå inte har någon motsvarighet i det principiellt liknande befintliga låset – får det ett ganska mycket högre omdöme än alla övriga.
4 Diskussion
Som synes i utvärderingstabellen är koncept två det minst lämpade att användas i en verklig produkt. Koncepten ett, tre och fyra är å andra sidan principmässigt
egentligen inte så olika konstruktioner som redan har provats, kunskapen om hur dessa beter sig är troligen förhållandevis stor inom företaget. Att koncept 2 fick det sämsta omdömet kan ju till viss del bero på att den begränsade kunskapen inom företaget och hos motortillverkaren i tillämpningen som robotlås. Den elektriska konstruktionens huvudsakliga styrka och svaghet är ju annars att den har möjlighet att köras om och om igen utan att behöva monteras isär mellan varje körning. Skall den monteras i ett rör som är avsett att laddas om kan detta vara en stor vinst. Skall den som i dagsläget är vanligast monteras i en engångsartikel är detta bara onödigt.
5 Slutsatser
Det befintliga robotlåset i RBS23 är ordentligt utprovat och har visat sig vara en bra konstruktion.
Koncept 1 är i sin förenklade form det enda som på allvar kan anses vara bättre än det befintliga låset.
Koncept 2 är i dagsläget ett ganska dåligt om än fungerande alternativ för ett robotlås, men har utvecklingspotential.
Koncept 3 är med sin kamspårskonstruktion flexibelt för olika tillämpningar, men är i övrigt inte speciellt attraktivt.
6 Rekommendationer
Vad som skall göras i framtiden kan delas i två grupper: Byte av befintligt lås och vidare utveckling. De olika alternativen skiljer sig en hel del.
6.1 Byte av befintligt lås
Det befintliga låset har gått igenom flera förbättringar och är idag en bra
konstruktion. Ska den bytas är det endast den förenklade versionen av koncept ett som är aktuell. Då måste ju naturligtvis konstruktionen dels fullbordas eftersom den endast är uppritad med spärrmekanism, dels måste det utrönas om förenklingarna kan genomföras utan att låset riskerar att fallera. Praktiska prov på konstruktionen bör också göras och eventuellt modifieringar beroende på provens utfall.
Vinsten med att byta lås är kanske främst ekonomiska. Konstruktionen använder den pyromotor som redan finns i NLAW så där finns vinster på färre lagerförda artiklar och större inköpsvolymer. Konstruktionen blir också aningens enklare.
6.2 Vidare utveckling
För varje koncept är redan upptaget vilken vidare utveckling som bör göras på respektive låskonstruktion och för att kunna använda dessa koncept i någon produkt så måste den utvecklingen genomföras. Koncept två var kanske minst intressant att använda men ger den största kompetensutvecklingen inom företaget. Därför rekommenderas att inleda ett nytt projekt för att ytterliga utveckla koncept två och utvärdera dess prestanda under verklighetstrogna förhållanden. Även om
konstruktionen inte kommer utnyttjas i någon befintlig produkt, kommer ett sådant projekt ge fler alternativ som är attraktiva i framtida produkter.
Referenser
1 Ullman Erik m.fl., Materiallära, 13:e utgåvan, Liber, Stockholm, 1997, ISBN
91-47-00157-7
2 Dahlberg Tore, Teknisk Hållfasthetslära, 3:e utgåvan, Studentlitteratur, Lund,
2001, ISBN 91-44-01920-3
BILAGA A. Beräkningar
BILAGA A.1 Koncept 1
Rörelseberäkningar
Kontaktytorna mellan robothållare och hake är i värsta fallet vinklade θ = 417, ° från
en linje som går från rotationscentrum till kontaktpunkten. Roboten kan påverka haken med maximalt 11kN. Eftersom den ena kontaktytan är vinklad från
vertikallinjen 7,3°, så måste normalkraften bli Fn
(
kN)
11,1kN3 , 7 cos 11 max = ° = . Avståndet
från kontaktpunkten till rotationscentrum är maximalt r1 =77,0mm. Med θ = 417, °
vinkel från rotationscentrum blir hävarmen 77,0mm⋅sin
(
7,41°)
=9,93mm. Hakenkan alltså utsättas för ett öppnande moment på maximalt 114Nm.
Det öppnande momentet på Fnmax⋅ r1⋅sin
( )
θ
motverkas av friktions moment runtaxeln=Fnmax⋅
µ
a⋅ra, som har 3mm radie i ramarna och i själva kontaktpunkten,vars moment är Fnmax ⋅
µ
⋅r1⋅cos( )
θ
. Om summan av friktionsmomenten ställs lika,man antar att
µ
a =µ
och därefter löser ut µ så får vi uttrycket( )
( )
77,0 cos(
7,41(
)
3,00)
0,125 41 , 7 sin 0 , 77 cos sin 1 1 = + ° ⋅ ° ⋅ = + ⋅ ⋅ = mm mm mm r r rθ
θ
µ
. D.v.s. omfriktionskoefficienten överstiger 0,125 kommer roboten p.g.a. sin påverkan inte kunna slå upp haken.
Öppningskrafter
Haken kommer att bromsas maximalt om robotens last antas komma i den punkten med minsta vinkeln till rörelseriktningen. båda sidor av haken har samma minsta vinkel, 3°, men den sidan av haken längst ifrån axeln har större momentarm.
Öppnande momentet av normalkraften blir här r2 ⋅Fn⋅sin(3°) och bromsande
friktionsmomentet r2⋅
µ
⋅Fn⋅cos( )
3° +r⋅µ
⋅Fn, återigen med antagandet att axeln har samma friktionskoefficient som kontaktytan hake-robot. Normalkraften(
16,9)
cos 11kN Fn = Totalt bromsmoment =( )
( )
(
r r r)
F(
r( )
r( )
)
Nmom man antar att friktionskoefficienten kan uppgå till maximalt 0,3. Motorn har en momentarm på 45,0mm. För att motorn skall övervinna friktionskrafterna måste den
generera N mm Nm 636 0 , 45 6 , 28
= . P.g.a. av att kontaktytorna hake-robot avlägsnar sig från
varandra kommer denna kraft sjunka så snart haken börjar röra på sig.
Haken skall roteras minst 9,37°=0,164radför att gå fri. Dessutom måste kontakten
hinna sluta, så vi ställer kravet att haken skall rotera 0,175rad. Testkurvor från
motortillverkaren visar att motorn inte ger full kraft förrän 3ms efter puls⇒17ms
från start till öppet lås. Vid konstant acceleration får vi 2 2 2 2 1210 017 , 0 175 , 0 2 2 2 t rads t = ⋅ = ∆ ⋅ = ⇒ =
∆
θ
α
α
θ
Hakens tröghetsmoment runtaxeln (från I-deas) =215kg⋅mm2 =2,15⋅10−4kg⋅m2 Momentet för att accelerera
haken blir M = J⋅
α
=2,15⋅10−4⋅1210=0,261Nm. Med 45,0mm momentarm blir dåkraftbehovet 5,80N 0450 , 0 261 , 0 =
= . D.v.s. om det hela tiden finns minst 5,80N över i
motorn efter att alla bromskrafter är övervunna kommer haken hinna öppna i tid.
Hållfasthetsberäkningar
Ursprungligen modellerades haken enbart som en triangulär ram, men denna
konstruktion riskerade att vridas vid upplåsningen eller belastning från robot. Därför modifierades den till en panel med förstärkningsbalkar runt om, och bedöms nu deformera så lite att den antas vara stel.
Ur testdokument fås att maximala kraften i motorn är 1550N med en
standardavvikelse på 88N. Om vi dimensionerar för att låset skall tåla nominella värdet plus tre standardavvikelser kommer 0,13 % av motorerna ha för hög drivkraft och riskera att överbelasta mekanismen. Om detta antal kan accepteras behöver
delarna dimensioneras för 1550N+3⋅88,4N =1820N . Eftersom förloppet sker med
hög hastighet kan man tänkas att det induceras svängningar i strukturen som kommer ge högre momentana belastningar. På grund av strukturens små
dimensioner antas här att dessa svängningar har dämpats tillräckligt innan några större deformationer har hunnit uppstå.
För att beräkna krafter på en axel antas axeln vara helt styv och omgivande material elastiskt. Axeln har en bredd b och radie r. Om axeln nu förskjuts en stäcka d(på grund av en last L) kommer en punkt på axeln med vinkeln θ från
Vidare antas att materialet som flexar, förflyttas enbart vinkelrätt mot axelns yta och att det är lika mycket material som kan flexa oavsett θ. Då är spänningen vinkelrätt mot axeln proportionell mot δ. Den del av spänningen som bidrar till att ta upp last i
förskjutningsriktningen är dessutom proportionell mot cos
( )
θ
. Högsta spänningenmax
σ
uppstår där θ = 0, och spänningen varierar därmed med σ σ 2( )
θmax cos
= .
Lasten blir integralen av spänningen från
( )
( )
( )
max max 2 2 max 2 2 max 2 2 2 max 2 4 2 2 sin 4 1 2 1 2 cos 2 4 1 cos 2 2σ
π
σ
π
θ
θ
σ
θ
θ
σ
θ
θ
σ
π
π
π π π π π π ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ = + ⋅ ⋅ = = ⋅ ⋅ + ⋅ ⋅ = ⋅ ⋅ ⇒ → − − − −∫
∫
d b r b r b d r b d r b vi fåralltså en spänningsfördelning som resulterar i att medelspänningen mot axeln blir medel medel d b L σ π σ σ ⇒ max = 4 ⋅
= . Vi antar att detta gäller även för en skjuvbelastad
axel. Som ytterligare stöd för detta antagande är medelbredden av en cirkel π4 av
diametern.
Haken
Den kortaste sträckan som haken kan avskjuvas är c:a 7,67mm(inte rakt avskjuvat, men kortast.) och fortfarande 12mm brett. Med 11kN Last blir skjuvspänningen
MPa 120 00 , 12 67 , 7 10 00 , 11 3 = ⋅ ⋅
och med säkerhetsfaktor 1,2⇒120MPa⋅1,2=143MPa
Krokens kontaktyta är 5,42mm hög och 12,0mm bred⇒5,42⋅12,0=65,0mm2, med
11kN last och säkerhetsfaktor måste materialet klara ett yttryck
MPa 203 0 , 65 10 0 , 11 2 , 1 3 = ⋅ ⋅
Värsta fallet av böjning av kroken uppstår när kontaktpunkten robot-krok är längst in i roboten, vilket ger 6,5mm hävarm. När kroken böjs kommer dock lasten i denna punkt minska. Ett mer realistiskt fall är därför att lägga en linjelast på kroken(vilket svarar mot lägsta yttryck som räknades nyss). Ett ytterligare fall skulle vara att kroken böjer iväg sig och lasten införs väldigt nära krokens infästningspunkt.
Momentet blir i värsta fallet 6,5⋅11,0⋅103 =71,5Nm I fallet med linjelast från längst ut på kroken till en millimeter från krokens övergång till armen (där roboten
slutar)blir momentet
∫
⋅ ⋅ 5 , 6 0 , 1 dl lq där q = totalkraften dividerat med längden av
kontaktytan där kraften är införd = 611,5−kN1,0 =2,0kNmm. Nm l q dl l q 41,3 2 0 , 1 2 5 , 6 00 , 2 2 2 2 5 , 6 1 2 5 , 6 1 = − = = ⋅ ⋅
∫
Den momentupptagande delen har bredden 12,0mm och längden 8,14mm.
Egentligen är längden större, p.g.a. en avrundning, men 8,14 blir lättare att räkna på och den verkliga lasten blir mindre. Spänningen blir
MPa längd bredd moment 540 14 , 8 0 , 12 5 , 71 6 6 2 2 ⋅ = ⋅ = ⋅ ⋅
eller med det lägre
momentet 311MPa 14 , 8 0 , 12 3 , 41 6 2 = ⋅ ⋅
. Med säkerhetsfaktor 1,2 blir siffrorna 647MPa resp. 374MPa.
Axelns area mot haken är 8,90⋅8,00=71,2mm2.
Medeltrycket 154MPa 2 , 71 10 0 , 11 3 = ⋅ =
Med kompensering för spänningsfördelning π4 och säkerhetsfaktor 1,2 blir
spänningen 235MPa
Hakens tvärsnittsarea runt axeln antas vara 8,90mm bred och 2⋅4,00mmhög (vilket
delen med full bredd är, det finns mer material med mindre bredd som bortses från) 2 2 , 71 2 00 , 4 90 , 8 ⋅ ⋅ = mm
= . Lasten 11kN ger medelspänning MPa
mm kN 154 2 , 71 0 , 11 2 = .
Tabell ger spänningskoncentrationsfaktor 2,15 och säkerhetsfaktor 1,2 ger 399MPa ”Balken” mellan axel och krok – som kan antas överför hela lasten från krok till axel – har arean 8,90⋅5,00=44,5mm2. Med 11kN last blir spänningen
MPa 247 5 , 44 10 0 , 11 ⋅ 3
Vi antar att hela motorns kraft tas upp i haken. detta resulterar i böjning och skjuvning av den del av haken som motorn trycker på
Momentet = motorkraft·hävarm = 1,82⋅103⋅3,6⋅10−3 =6,55Nm Detta tas upp på en bredd av 8,9mm och en längd av 16,0mm. Spänningen i materialet p.g.a. momentet
blir MPa bl M 2 , 17 0 , 16 90 , 8 10 55 , 6 6 6 2 3 2 ⋅ = ⋅ ⋅ = .
Kraften 1,82kN från pyromotorn försöker skjuva av en yta av 8,90⋅16=142mm2.
Skjuvspänningen här blir 12,8MPa
142 10 82 , 1 3 = ⋅ .
Haken kommer att vridas vid last på kroken eller när man sparkar på den med motorn. I och med att haken är till formen väldigt nära en tringel, som i sig är väldigt formstabil, dessutom är utrymmet mellan triangelns ben fylld med en panel som styvar upp ytterligare så anser vi att haken kommer deformera så lite att vi inte behöver bry oss om det.
Ramen
Axelns area mot ramen är 2⋅3,00⋅8,00=48,0mm2.
Medeltrycket 229MPa 0 , 48 10 0 , 11 3 = ⋅ =
Med kompensering för spänningsfördelning
π
4
och säkerhetsfaktor 1,2 blir
spänningen 229⋅1,2⋅ 4 =350MPa
π .
Lasttagande del i ramen antas vara ramens minsta tvärsnitt under axeln plus lika
mycket ovanför=4,50⋅3,00⋅2⋅2=54,0mm2. Lasten 11kN ger därför medelspänning
MPa 204 0 , 54 10 0 , 11 3 = ⋅
. Spänningskoncentration tas ur tabell = 2,15. tillsammans med säkerhetsfaktor 1,2 blir Spänningen materialet måste tåla
MPa 526 0 , 54 10 0 , 11 2 , 1 15 , 2 ⋅ ⋅ ⋅ 3 =
Man kan tänka sig att hålet kommer skjuvas ut. Den avskjuvade arean blir här nästan 8mm lång och garanterat mer än 4mm med ramens tjocklek över och under axeln på
båda ramar. total arean blir nu mer än 4⋅4,00⋅3,00=48,0mm2. Med 11kN Last blir spänningen MPa mm kN 229 48 11
2 = . Med säkerhetsfaktor 1,2 måste materialet tåla
MPa
MPa 275
229 2 ,
1 ⋅ = . Till detta kommer spänningskoncentration. En 4mm lång
del som har en sträckgräns på c:a 1GPa töjs inte mer än ⇒ = GPa GPa E 200 1 σ
deformationen på delen kommer inte
överstiga mm m GPa GPa µ 20 4 200 1 =
⋅ utan att totalhaveri sker. Om vi tillåter 20µm
deformation i ramen behöver vi alltså inte ta någon större hänsyn till spänningskoncentration. Axeln Axelns tvärsnittsarea 2 2 2 3 , 50 4 00 , 8 4 mm d = ⋅ = =π π
Medelskjuvlasten som skjuvar av axeln mellan ram och hake blir
MPa 219 3 , 50 10 0 , 11 ⋅ 3
= . Lägg på spänningsfördelningsfaktor 4/pi och säkerhetsfaktor
MPa 334 2
,
1 ⇒ skjuvlast.
Trycklasten från ram och hake är redan beräknade under dem och är 350MPa respektive 236MPa
Hållare för pyromotor.
Arean som motorn stöder mot i hållaren är π
(
6,352 −2,352)
=27,3mm2. MedMotorkraften 3,5kN blir yttrycket MPa
mm kN 4 , 66 3 , 27 82 , 1
2 = . Eftersom ytan är sfärisk
kommer lasten lokalt bli högre. Vi hänvisar till resonemanget lastfall axel. Här är ytan är sfärisk i stället för cylindrisk så vi kvadrerar det resultatet och får en
spänningsfördelningsfaktor 4 1,62 2 ≈
π . Detta resultat är väl inte helt representativt
för verkligheten men i alla fall inte helt taget ur luften. Med denna justering och säkerhetsfaktor 1,2 måste materialet tåla 1,62⋅1,2⋅66,4=129MPa.
Ytorna mellan hållaren och ramen är 6,00⋅3,00⋅2=36,0mm2. Denna yta är större än kontaktytan mellan pyromotor och hållare, är utsatt för samma kraft och är mer homogent belastad. Ytan som skall avskjuvas av motorkraften är i sammanhanget
enorm
(
2⋅8,00⋅30,0=480mm2)
, så här blir spänningarna låga. Yttrycket från spärren när den dras fram av motorn ges av att halva motorlasten kommer att tryckapå en yta som är 2,00⋅9,00=18,0mm2. Det ger yttrycket 50,4MPa
0 , 18
908
= . Med
säkerhetsfaktor 1,2 måste materialet tåla 60,5MPa. Stödet
Materialet i stödet måste som visas i avsnittet för spärren tåla en trycklast från spärren av 262,5MPa. Spärren stöder mot stödet och ett moment uppstår i spärren vid upplåsning. Detta moment är precis innan haken är upplåst
mm N 49,2
310 ⋅ hävarm = 15,2Nm. Detta moment kommer att försöka vrida av
stödet, förvisso tas halva momentet upp i hållaren för motorn, men det är endast tryckkrafter som tas upp så toppspänningen blir i stort sett densamma. Vi får att
W M
⋅ =
2
τ (2 eftersom det är två stödpunkter i ramen). W är vridmotståndet 2
h b k⋅ ⋅
= .
k ges ur tabell
(
)
35,0MPa00 , 6 00 , 3 246 , 0 2 310 246 , 0 = ⋅ ⋅ ⋅ = ⇒τ . Tvärsnittsarean i
stödet är drygt 17,141592653mm². För att ta upp 908N får vi en skjuvspänning på MPa mm N 9 , 52 1 , 17 908
2 = . Effektivspänningen blir 110MPa.
Robotstycke
Stycket i roboten kommer, eg. endast behöva ta upp trycklaster, eftersom den är helt nedsänkt i roboten. Det är dock lämpligt att stycket fördelar lasten jämnt till roboten, så vi antar här att den är fast inspänd i ytan med skruvhålen. Det betyder en trycklast på kontaktytorna med haken, som redan är beräknade till 203MPa. Den ena
kontaktytan har en yta som avskjuvas respektive böjs med längden 4,20mm(den andra är större = mindre last). Bredden är 12,0mm =>
skjuvspänningen kN 218MPa 0 , 12 20 , 4 11 = ⋅ = . Säkerhetsfaktor 1 ⇒,2 262MPa.
Momentet som böjer av den blir med hänvisning till beräkningen för haken Nm l q dl l q 31,9 2 0 2 65 , 5 00 , 2 2 2 2 65 , 5 0 2 65 , 5 0 = − = = ⋅ ⋅
∫
. Detta moment kommer att tasupp av roboten själv med en okänd mängd varför vi räknar på att hela momentet tas genom styckets svagaste punkt. Spänningen blir
MPa längd bredd moment 900 20 , 4 0 , 12 9 , 31 6 6 2 2 ⋅ = ⋅ = ⋅ ⋅
och med säkerhetsfaktor 1080MPa.
Effektivspänningen blir här σmoment +3⋅τ =1170MPa.
Trycket
Motorns kolvstång har diametern 3mm, dess area är alltså 1,52⋅π =7,10mm2
Yttrycket mot trycket blir då MPa
mm N 257 10 , 7 1820
2 = . När haken snedställer sig blir
ytan mindre, men kolvstång/trycke kommer deformera tills en tillräckligt stor kontaktyta uppnås, och detta kan vi tillåta.
Trycket utsätts för en axiell last på 200MPa
70 , 1
1820
2 ⋅π = .
Kontaktytan mellan hävarm och trycke är 4,56mm². Med motorkraften 1820N blir
kontakttrycket MPa mm N 398 56 , 4 1820
2 = . Med säkerhetsfaktor måste materialet tåla
478MPa. Nu kommer hävarmen att snedställa sig och därför ge en större last i kontaktytan. Men den lasten kommer att uppstå när motorkraften har gått ner en del och yttrycket antas därför bli lägre än det nyss beräknade.
Trycket pressas också ner i haken, men denna kontaktyta kan plastiskt göra sig mycket större än kontaktytan mellan trycke och hävarm.
Hävarmen
Hävarmen kan inte ta upp något moment och är utsatt enbart för tryck. Den minsta arean som trycket tar sig igenom är tveklöst kontaktytan mellan hävarmen och trycket. Spänningen här är redan beräknad = 478MPa
Fjädern
Fjäderns kontaktytor mot trycke och hake är svårbedömda, men om man antar att fjädern tillverkas ur en fyrkantstång istället för rundtråd, avrundar kanterna och antar att fjädern ej får deformeras nämnvärt plastiskt (för att behålla sina
fjäderegenskaper) kan man räkna med en yta på π
(
2,852 −2,252)
=9,61mm2.Yttrycket blir då MPa
mm N 189 61 , 9 10 82 , 1 2 3 = ⋅
Fjäderns fjäderkonstant bör vara låg p.g.a. att haken inte ska trycka onödigt hårt mot spärren och därmed bromsa upplåsningen av haken men å andra sidan hög för att dels hålla tillbaks trycket om röret utsätts för en stöt och dels reducera smällen när fjädern trycks ihop fullständigt. Massan på trycket är 1,99g om röret accelereras med
N s
m 1000 0,00199 1,99
1000 2 ⇒ ⋅ = kraft utan att göra full rörelse => medelkraften i
fjädern måste överstiga 1,99N, bortsett från den kraft som spärren själv håller emot
med. Detta översätts i en fjäderkonstant på 5,0 10 4 3,97 103 Nm
99 , 1 ⋅ = ⋅ −
Totala bromskraften får ej överstiga motorns minsta garanterade kraft, som vi här
antar är den antar vi är nominella kraften efter 5ms⋅en volymfaktor. Volymfaktorn
är svår att avgöra och kan redan vara inräknad i de kurvor vi använder, för säkerhets skull drar vi ändå bort kraft. Vi får från datablad på en annan, mindre motor att den innehåller 50mg drivmedel. Densiteten på drivmedlet uppskattas till mindre än
⇒ 3 2
mm mg
50mg tar upp minst 25 mm³. Cylindern antas ha ⇒ = ⋅ ⋅ = ⇒ =4,00 2 2,00 12,6 2 mm A mm π
φ extralängd bortsett från slaget
mm 2 6 , 12 25 ≈
> . När kolven har gjort ~1mm slag har volymen ökat relativt från
ungefär 2 till 3 volymenheter. Vi bortser från att gaserna kyls av
expansionen(molekylerna är ändå relativt komplexa, vilket leder till låg temperatursänkning) och antar därför grovt att trycksänkningen
N F ms 733 3 2 1100 3 2 5 = ⋅ = ⇒
≈ . Hävarmens kraftväxling i detta läge är
40 , 5 425 , 8 .
Tillgänglig kraft att lyfta spärren med är alltså 470N
42 , 8 40 , 5 733⋅ = . När spärren
öppnar är deformationskraften 249N. Tillgänglig kraft för acceleration och friktion
är då 470−249=222N.
Dra bort några Newton för acceleration så får bromskraften inte överstiga 200N. Kontaktytan mellan spärr och hake har en lutning på 2,862405 grader och en friktionskoefficient antas på 0,3. Med kontaktkraften F blir bromskraften
(
°)
+ ⋅ ⋅(
°)
⋅sin 2,86 0,3 F cos 2,86
F som måste vara mindre än
(
)
(
)
N N 572 86 , 2 cos 3 , 0 86 , 2 sin 200 200 = ° ⋅ + °⇒ . Kraften från fjädern är inte exakt
riktad i denna riktning, så fjäderkraften får inte vara mer än 572⋅cos
(
2,86°)
=571Nnär den är hoptryckt 1,0mm. med fjädern olastad i sitt normala läge motsvarar detta
en fjäderkonstant på 1,0 10 3 5,71 105 Nm
571
⋅ =
plats inom φ =6,0mm, ha en innerdiameter på 3,4mm, en olastad längd på 6,0mm,
en fri slaglängd på mer än 1,62mm och fjäderkonstant mellan 4 ⋅103 Nmoch
m N 5 10 7 , 5 ⋅ Spärren
Avståndet från spärrens infästningspunkt till lyftpunkten är 49,2mm. Avståndet från infästningspunkten till kroken, som ska lyftas 2,00mm, är 40,2mm. spärren antas vara en balk som är 8,00mm bred och 2,00mm tjock. Dess yttröghetsmoment blir då
4 3 8,0 64,0 00
,
2 ⋅ = mm . En konsolbalk fast inspänd i ena änden och lastad vinkelrätt i
andra böjer sig enligt
( )
− = 3 2 3 3 6 L x L x EI PL x w där w
( )
x är nedböjningen av balken. Med w( )
x =2,00mm i x=40,2mm får vi( )
N L x L x L EI x w P 310 2 , 49 2 , 40 2 , 49 2 , 40 3 2 , 49 0 , 64 10 70 6 00 , 2 3 6 3 2 3 3 3 2 3 = − ⋅ ⋅ ⋅ = − ⋅ =Förflyttningen i tryckpunkten blir
( )
mmEI PL L w 2,74 0 , 64 10 70 3 2 , 49 310 3 3 3 3 = ⋅ ⋅ ⋅ ⋅ = = .
Den kraft som detta innebär att motorn bromsas med kommer vara den utböjningskraften utväxlat av hävarmen + friktionen mellan trycke och hake. Hävarmens totala längd är = 10mm.
Hävarmens längd i spärrböjningsriktningen är = geometriskt 3,4mm + deformationen 2,74mm = 6,14mm.
(
310 0,3)
491N 14 , 6 14 , 6 10 310 2 2 = ⋅ + − ⋅= Det tillkommer en liten kraft för att
accelerera spärren uppåt. Denna kan lösas analytiskt genom att lägga in ett balksnitts acceleration i elastiska linjens differentialekvation. Om man dessutom lägger in normalspänningen i ekvationen så får man en exakt lösning. Detta bör resultera i en böjning av balken som skiljer från elementarfallet använt här. Vi nöjer oss med att konstatera att balken inte har konstant tvärsnitt och inte heller har liten utböjning. Vi har redan här har introducerat ett fel. Haken som låser roboten kräver knappt 6N för sin acceleration. Spärren är mycket lättare än haken(13,0g mot 108g), men behöver
en större acceleration. Deformationskrafterna på ungefär 300N kommer ändå vara dominerande om inte motorn ger mycket stora krafter. Men det antagandet upphäver problemet med för lite krafttillgång.
Längden på hävarmen=l=10,0mm
Hakens initiala vertikala katet=s0 =3,4mm
Tillskottet på den vertikala kateten = utböjningen av spärren=w
( )
L =wOm
( )
− ⋅ = 3 2 3 3 6 L x L x L EI x w P , för( )
3 3 L EI L w P L x= ⇒ = ⋅ , så får vi att kraftenfrån motorn behöver vara
2 2 0 3 2 0 3 2 0 3 1 3 1 w s w lw L EI s w l w L EI s w l P Pm − + = − + ⋅ ⋅ = − + ⋅ = . Derivera med avseende på w så får vi
(
)
2 2 0 3 0 0 2 3 2 1 2 3 w s w lw s w s l w L EI dw dPm − + − + = . Förutsätt att 0 0<w<l−s och sätt derivatan 0(
)
3 1 0 3 2 0 0 310,02 3,4 3,4 3,58 0 0 2 = − ⋅ = − = ⇒ = − + ⇒ = w l s s s w s l vilket ger oss att motorn kommer bromsas som mest när spärren är utböjd 3,58mm. Detta w ligger inom kravet0<w<l−s0. Motorkraften i det lägetblirPm 3,58 414N 4 , 3 58 , 3 58 , 3 0 , 10 2 , 49 0 , 64 10 70 3 2 2 3 3 = − + ⋅ ⋅ ⋅ ⋅
= . Denna kraft kommer dock
att uppstå i ett läge där friktionskrafterna från robotkroken = 0. Dessutom är trycket helt intryckt i haken, så där finns ingen relativ rörelse och därmed ingen friktion. Detta är den största kraften som spärren kommer att bromsa motorn med. Det
kommer att uppstå en liten friktion i kontaktytorna mellan hävarmen och trycke samt spärrarm, men denna rörelse har korta hävarmar och blir förhållandevis liten. Vid den här utböjningen rör sig inte trycket i mot haken om ej tillräckligt stor kraft finns att tillgå, så där uppstår ingen friktion. Nödvändiga accelerationskraften för hakens minimiacceleration är 5,80N. Totalt behövs nu 496,4N från motorn.
Spärren har en hävarm mot haken på minst 48mm. I det orealistiska fallet att alla ytor som kan röra sig mot varandra har friktionskoefficienten = 0 måste den ta upp ett moment på 114Nm. Med 48mm hävarm får vi för spärren blir spärren belastad
med 2,38kN. Spärren har en tvärsnittsarea på 2⋅8,0=16,0mm2Spärren kommer
alltså belastas med en dragspänning av MPa
mm kN 149 0 , 16 38 , 2 2 = eller med en
säkerhetsfaktor1,2 = 179MPa. När motorn sparkar kan maximala kraften uppgå till 1,82kN. Denna måste tas upp som dragspänning i spärren, vilket ger oss spänningen
MPa mm N 113 0 , 16 1820
2 = . Säkerhetsfaktor här ger 113⋅1,2=136MPa. Dessa är
engångslaster, så materialet behöver inte vara starkare. Aluminium duger därför utmärkt i denna del. Alternativt kan spärren tillverkas i ett starkare material och därför göras tunnare, vilket gör den lättare att böja. här räknar vi dock med en tjock aluminium-spärr.
När haken dras framåt av motorn måste den hållas emot av hållare och stödet. båda
dessa tar samma last, men stödet har en mindre stödyta. Lasten blir N 908N
2 1820
= .
Stödytan är 1,00⋅9,00=9,00mm2 och därmed spänningen med
säkerhet MPa mm N 121 2 , 1 00 , 9 908 2 ⋅ = .
BILAGA A.2 Koncept 2
Rörelseberäkningar
Kontaktytorna mellan robothållare och hake är i värsta fallet vinklade θ = 33, ° från
en linje som går från rotationscentrum till kontaktpunkten. Roboten kan påverka haken med maximalt 11kN. Eftersom den mesta vinklade kontaktytan ligger 11,0°
från vertikallinjen, så måste normalkraften bli Fn
(
kN)
11,2kN0 , 11 cos 11 max = ° = .
Avståndet från kontaktpunkten till rotationscentrum är maximalt r1 =77,0mm. Med
° = 33,
θ vinkel från rotationscentrum blir hävarmen 77,0mm⋅sin
(
3,3°)
=4,43mm.Haken kan alltså utsättas för ett öppnande moment på maximalt 49,7Nm.
Det öppnande momentet från roboten blir Fnmax⋅ r1⋅sin
( )
θ och motverkas avfriktionsmoment runt axelnFnmax⋅µa ⋅ra, som har 2,5mm radie i ramarna och i
själva kontaktpunkten, vars moment är Fnmax⋅µ⋅r1⋅cos
( )
θ . Om summan avfriktionsmomenten ställs lika, man antar att µa =µ och därefter löser ut µ så får vi
uttrycket cossin
( )
( )
77,077,0cos(
3sin,3(
)
3,32,)
5 0,0558 1 1 = + ° ⋅ ° ⋅ = + ⋅ ⋅ = mm mm mm r r rθ
θ
µ
. D.v.s. omfriktionskoefficienten överstiger 0,0558 kommer roboten p.g.a. sin påverkan inte kunna slå upp haken.
Med friktionskoefficient µ = 0,2 och hållkraft för roboten FNhåll =1400N kommer
det för att röra på haken behövas ett moment av
(
)
( )
(
)
(
)
Nmm F r F r F nhåll nhåll nhåll 15900 0 , 77 3 , 3 sin 0 , 11 cos 1400 0 , 77 2 , 0 1400 5 , 2 2 , 0 1400 0 , 77 sin 0 , 11 cos 1 = ⋅ ° ⋅ ° − ⋅ ⋅ + ⋅ ⋅ = = ⋅ ⋅ − ⋅ ⋅ + ⋅ ⋅µ
µ
θ
Nödvändigt accelerationsmoment Hakens rörliga den har J = 128kgmm² AccelerationsöppningskrafterHaken skall roteras minst 5,4° för att gå fri. Dessutom måste spärrelektroniken få fritt rum så vi stipulerar 6,5°≈0,113rad. Motorn kan ge full kraft från start
ms 20
2 2 2 2 565 020 , 0 113 , 0 2 2 2 t rads t = ⋅ = ∆ ⋅ = ⇒ =
∆
θ
α
α
θ
Hakens tröghetsmoment runt axeln(från I-deas) =128kg⋅mm2 =1,28⋅10−4kg⋅m2 Momentet för att accelerera haken blir M =J⋅
α
=1,28⋅10−4⋅565=0,0721Nm. Summerar vi med”stödreaktionsmomentet” 15,9Nm får vi minsta moment 16,0Nm. Med 72,9mm
momentarm blir då kraften i vajern 220N
0729 , 0 0 , 16 = = . Hållfasthet
För att beräkna krafter på en axel antas axeln vara helt styv och omgivande material elastiskt. Axeln har en bredd b och radie r. Om axeln nu förskjuts en stäcka d(på grund av en last L) kommer en punkt på axeln med vinkeln θ från
förskjutningsriktningen förflyttas en sträcka
δ
=dcos( )
θ
. Detta gäller om d <<r. Vidare antas att materialet som flexar, förflyttas enbart vinkelrätt mot axelns yta och att det är lika mycket material som kan flexa oavsett θ. Då är spänningen vinkelrätt mot axeln proportionell mot δ. Den del av spänningen som bidrar till att ta upp last iförskjutningsriktningen är dessutom proportionell mot cos
( )
θ
. Högsta spänningenmax
σ
uppstår där θ = 0, och spänningen varierar därmed medσ
σ
2( )
θ
max cos
= .
Lasten blir integralen av spänningen från
( )
( )
( )
max 2 2 max 2 2 max 2 2 2 max 4 2 sin 4 1 1 2 cos 2 4 1 cos 2 2σ
π
θ
θ
σ
θ
θ
σ
θ
θ
σ
π
π
π π π π π π ⋅ ⋅ ⋅ = + ⋅ ⋅ = = ⋅ ⋅ + ⋅ ⋅ = ⋅ ⋅ ⇒ → − − − −∫
∫
r b r b d r b d r b vi fåralltså en spänningsfördelning som resulterar i att medelspänningen mot axeln blir medel medel r b L
σ
π
σ
σ
⇒ max = 4 ⋅= . Vi antar ätt detta gäller även för en skjuvbelastad
axel. Som ytterligare stöd för detta antagande är medelbredden av en cirkel
π
4 avdiametern. Accelerationslås
Massan på denna detalj, om Den tillverkas i WC-Co med densiteten 14,4g/cm³ är 11,0g. Om låset utsätts för en acceleration på 1000m/s² kommer alltså axeln belastas med 11N direkt från detaljens acceleration, men denna acceleration kommer också resultera i en reaktionskraft från vajerhjulet på 37N vinkelrätt mot från
accelerationskraften. Dessutom tillkommer friktionskraften från vajern med ytterligare c:a 37N. summan blir en kraft med storleken 61N. Axelns tvärsnittsarea
är 1,002⋅
π
=3,14mm2. Detta ger oss en medelspänning av MPa mm N 19 14 , 3 61 2 . Medsäkerhet och spänningsfördelning får vi en kraft på 19⋅1,2⋅4 =30MPa
π
.Axeln
Axelns area mot haken är 8,90⋅6,00=53,4mm2. Medeltrycket blir
MPa 206 4 , 53 10 0 , 11 3 = ⋅
. Med kompensering för spänningsfördelning
π
4 ochsäkerhetsfaktor 1,2 blir spänningen 206⋅1,2⋅ 4 =315MPa
π
.Axelns area mot ramen är 2⋅3,00⋅5,00=30,0mm2. Medeltrycket
blir 367MPa 0 , 30 10 0 , 11 ⋅ 3
. Med kompensering för spänningsfördelning
π
4 ochsäkerhetsfaktor 1,2 blir spänningen 367⋅1,2⋅4 =560MPa
π
. Axelns tvärsnittsarea är 2 2 2 6 , 19 4 00 , 5 4 mm d = ⋅ =π
π
. Medelskjuvlasten som skjuvar
av axeln mellan ram och hake är1119,0,106 560
3
= ⋅
. säkerhetsfaktor och
spänningsfördelning ger 560⋅1,2⋅ 4 =856MPa
π
. Detta är en ganska stor skjuvlast(kommer troligen att öka ytterligare p.g.a. att axeln har ändrad diameter just här), men det kan det vara värt i och med att den minskade diametern bidrar till minskat friktionsmotstånd. med 6mm axel blir istället spänningen
MPa 594 4 2 , 1 0 , 6 10 0 , 11 2 3 = ⋅ ⋅ ⋅ ⋅
π
π
. 2mm axelAxeln är lastad på samma sätt som tidigare. Lasten från haken behöver inte uppgå till mer än 220N. Motorn kan styras väldigt noggrant, så mer än 220N behöver man inte räkna med att axeln belastas med. medelyttrycket blir då