Nr 184 - 1979
Statens väg- och trafikinstitut (Vl'I) - 581 01 Linköping
ISSN 0347-6030
National Road & Traffic Research Institute - 5-581 01 Linköping - Sweden
.
Va'gojämnhetssimulator
-7 »
'
- en funktionsbeskrivning ,
Nr 184 - 1979
Statens väg- och trafikinstitut (VTI) - 581 01 linköping
ISSN 0347-6030
National Road & Traffic Research Institute - S-581 01 Linköping - Sweden
Va'gojämnhetssimulator
,I84
- en funktionsbeskrivning
FÖRORD
Initiativet och påbörjandet av utvecklingen av väg-ojämnhetssimulatorn togs av Olle Nordström, därefter har Georg Magnusson ansvarat för den tekniska konstruk-tionen och utvecklingen. Peter W Arnberg har ansvarat för de beteendevetenskapliga aspekterna och provning
av utrustningen i förförsök och experiment. Denna
rapport utgör en delpresentation i ett projekt som
leds av Peter W Arnberg och bekostas av vägverket och
VTI gemensamt. Simulatorn har utnyttjats i en studie
vilken rapporterats under titeln "Vägojämnheters
in-verkan på bilförares prestation och trötthet. En
litteraturgenomgång och ett simulatorexperiment,
Arnberg och Åström, VTI rapport nr 181, 1979".
INNEHÅLLSFÖRTECKNING Sid REFERAT I ABSTRACT II SAMMANFATTNING III SUMMARY VI 1 BAKGRUND 1 2 VÄGOJÄMNHETER 2 3 VÄGPRESENTATION 5 4 STOKASTISK BRUSGENERERING 8 5 PRESTATIONSREGISTRERING 16 6 SÄKERHETSANORDNINGAR 21
7 MÄTNING AV PÅKÄNNING. ISO STANDARD 2631 22
8 UTVECKLINGSMÖJLIGHETER 38
LITTERATURLISTA 41
Bilaga 1
(3 sidor)
Vägojämnhetssimulator - en funktionsbeskrivning
av Knut Råhs
Statens väg- och trafikinstitut 581 01 LINKÖPING
REFERAT
I denna rapport beskrivs den av VTIs bilsimulatorer som går under benämningen vägojämnhetssimulator (VOJ). Rapporten omfattar en teknisk beskrivning av simula-torns uppbyggnad samt en beskrivning av vilka
vibra-tioner som kan åstadkommas utgående från 1805
hel-kroppsvibrationsnorm 2631.
I rapporten beskrivs även den "bilkörnings"-situation som föraren utsätts för och hur förarens prestation och aktiveringsgrad mäts.
II
Road Roughness Simulator - a function description
by Knut Råhs
National Swedish Road and Traffic Research Institute 8-581 01 LINKÖPING SWEDEN
ABSTRACT
This report describes the institute's vehicle simulator
which has been designated the Road Roughness Simulator.
The report comprises a technical description of the
simulator's construction and a description of those
ty-pes of Vibration which can be generated on the basis of
ISO whole-body Vibration standard 2631.
The report also describes the driving situation to which
the driver is exposed and the way in which the driver's
performance and degree of activation are measured.
III Vägojämnhetssimulator - en funktionsbeskrivning
av Knut Råhs
Statens väg- ochtrafikinstitut 581 01 LINKÖPING SAMMANFATTNINGI denna rapport beskrivs VTIs vägojämhetssimulator (VOJ). Simulatorn består av en avkapad bilkaross med
alla reglage bibehållna. Den inre miljön är alltså
likvärdig meden vanlig bil. Framför karossen har en filmduk placerats. På denna projiceras en film med bilkörning på en motorväg. Föraren kan med hjälp av simulatorns ratt vrida projektorn som projicerar
fil-men och därigenom på sätt och vis styra "bilen" på
vägen.
En syntetiskt genererad brussignal adderas till det
ratt-utslag försökspersonen åstadkommer. På detta sätt går
inte "bilen" i ett rakt spår utan kompensation från
förarens sida. Detta för att efterlikna bilkörning vid verkliga förhållanden där vägbanans lutning, vindar
etc påverkar bilens kurs.
Bilkarossen är upphängd i en ställning med hjälp av
kedjor, vilka löper runt kedjehjul monterade på två
axlar. Via en utväxling är den nedre axeln förbunden med en hydraulisk motor vilken kan styras med en
elektrisk signal. På detta sätt kan olika typer av
vibrationer åstadkommas i simulatorn. För att
efter-likna vägojämnheter används en syntetiskt genererad brussignal, vars frekvensinnehåll samt amplitud kan varieras.
Den prestationsregistrering som görs under ett försök omfattar ett flertal parametrar. Registrering sker av förarens pulsfrekvens, rattrörelser, fotrörelser samt
IV
olika reaktionstider vid olika överraskningssituatio-ner. En dator sköter om all datainsamling samt
beräk-ningar på dessa värden.
Förarens puls registreras med hjälp av en fotocell vilken mäter ljustransmissionen i örsnibben. Rattrö-relserna registreras som avvikelser från nolläget hos projektorns läge. Signalen RMS-bildas och det erhållna
värdet utgör ett mått på hur väl föraren kompenserat
för de stokastiska störningar vilka har påverkat pro-jektorns läge. Fotrörelserna registreras genom gas-pådraget. Föraren är uppmanad att hålla en viss has-tighet och avvikelser från denna registreras genom gasen. Även denna signal RMS-bildas.
Föraren utsätts för två typer av stimuli:
1. En strålkastare som tänds framför motorhuven och
2. En svag lampa som tänds bakom honom och endast kan
upptäckas genom backspegeln
Förarens reaktion på stimulus 1. är att släppa gasen
och bromsa så fort som möjligt och på stimulus 2. att
endast släppa gasen. I samband med att dessa stimuli
ges, uppmäts ett antal reaktionstider: tiden till det
att föraren släppt gasen, tiden till det att foten
be-finner sig över bromspedalen och tiden till det att
fullt bromstryck uppnåtts.
Den typ av vibrationer som kan ges via simulatorn har
utvärderats enligt ISOs helkroppsvibrationsnorm 2631.
Accelerationerna i vertikalled uppmäts med en accelero-meter och RMS-värdet av accelerationen inom varje
ters-band från 1,6 Hz till 80 Hz registreras. Med hjälp av
vägningsfaktorer för varje tersband (människan är som
mest känslig för vibrationer i området 4 - 8 Hz) kan
ett mått på styrkan av vibrationerna beräknas.
Gränsvärden på den exponeringstid man kan utsättas för
olika RMS-Värden av accelerationen definieras av
ISO-normen. Denna maximala exponeringstid varierar
beroen-de på om man stuberoen-derat tiberoen-den till beroen-dess att
komfort-eller prestationsnedsättningar förekommer komfort-eller tiden
till dess att hälsorisker föreligger för
försöksper-sonen.
VI
Road Roughness Simulator - a function description
by Knut Râhs
National Swedish Road and Traffic Research Institute 5-581 01 LINKÖPING SWEDEN
SUMMARY
This report describes the institute's road roughness
simulator. The simulator consists of a truncated car
body complete with all controls. The internal
environ-ment is therefore equivalent to an ordinary car. A
pro-jector screen is placed in front of the car. By turning
the steering wheel in the simulator the driver can
con-trol the projector and the film and thus "steer" the car
along the road.
A synthetically generated noise signal is added to the
steering wheel movement made by the test driver. In this
way the car will not drive straight without compensation
from the driver. This is done so as to simulate car
dri-ving under realistic conditions where road camber, wind etc influence the direction of the car.
The car body is suspended in a frame with the aid of
chains which are passed round sprockets mounted on two
axles. The lower axle is connected by a gear train to
an hydraulic motor which can be controlled by an
electri-cal signal. In this way various types of vibration can
be generated in the simulator. In order to simulate road
roughness a synthetically generated noise signal is used,
whose frequency components and amplitude can be varied.
The performance recordings made during each experiment
comprise a number of parameters. Recordings are made of
the driver s pulse rate, steering wheel movements, foot
movements and various reaction times in emergency
situa-tions. A computer handles all data acquisition and
cal-culations using these values.
VII
The driver's pulse is recorded using a photocell which
measures light transmission through the labe of the ear.
Steering wheel movements are recorded as denations from
the straight ahead position of the projector. The signal
is RMS-generated and the value obtained constitutes a
measure of how well the driver has compensated for the
stochastical disturbances which have influenced the
position of the projector. Foot movements are recorded
via the accelerator position. The driver is requested to
maintain a certain speed and deviations from this are
recorded via the accelerator. This signal is also
RMS-generated.
The driver is exposed to two types of stimulus:
1. A headlamp which is lit in front of the bonnet and
2. A weaker light which is lit behind him and can only
be seen in the rear-view mirror.
The driver's reaction to stimulus 1 is to release the
accelerator and to brake as quickly as possibly and to
stimulus 2 only to release the accelerator. A number of
reaction times are measured in conjunction with these
stimuli; the time until the driver releases the accele-rator, the time until his foot is above the brake pedal
and the time until full braking pressure has been
reached.
The type of vibration which can be produced by the
simu-lator has been evaluated in accordance with ISO's
whole-body vibration standard 2631. Vertical accelerations were
measured with an accelerometer and the RMS value of the
acceleration within each third-octave band from 1,6 Hz to 80 Hz was recorded. By using weighting factors for each third-octave band (human beings are most sensitive
to vibrations in the 4-8 Hz range) a measure of the
vibration strength was calculated.
VIII
The limiting values for the time during which a person
can be exposed to different RMS values of acceleration
are defined by the ISO standard. The maximum exposure
time varies according to whether a study is made of the
time until comfort or performance deterination occurs
or the time until the health of the test subject becomes
endangered.
BAKGRUND
Vid bilkörning uppkommer en mängd olika vibrationer som
överförs till bilförarna. Bilens fjädringssystem,
däckutrustning och vägens ojämnheter påverkar vibratio-nernas frekvens och amplitud. Likaså har bilens has_ tighet ett viktigt inflytande. Vid studium av
vibra-tioners påverkan på bilförare krävs att olika
försöks-personer utsätts för likartade vibrationer under
lik-artade förhållanden. Detta kan vara svårt att åstad=
komma i fältförsök. Sålunda har en bilsimulator
kon-struerats vars två huvuduppgifter är att:
1) ge en upplevelse av de skakningar och vibrationer
som vägojämnheter kan ge upphov till, samt
2) simulera den visuella situation och de rörelser
som är aktuella vid bilkörning.
Simulatorn kan användas till en rad olika typer av för-sök t ex studium av vibrationspåverkan i form av pre-stationsnedsättningar, trötthetseffekter, komfort och synförändringar. Simulatorn är därigenom en indirekt metod för att studera vägojämnheters trafiksäkerhets-mässiga konsekvenser. Även andra applikationer är
tänkbara - t ex studium av reglageutformning. Hittills har en undersökning utförts med Simulatorn (Arnberg och Åström, 1979) där prestationers samband med vibra-tioner studerades. Dessutom är kompletteringsförsök
till denna undersökning planerade.
Huvudändamålet med denna rapport är att beskriva den bilsimulator vid VTI som går under benämningen
Väg-ojämnhetssimulator (VOJ).
VÄGOJÄMNHETER
För att kunna efterlikna de skakningar och vibrationer
som Vägojämnheter ger upphov till består
vägojämnhets-simulatorn av en i vertikal led rörlig bilkaross. Karos-sen (en VW) är avkapad bakom förarstolen och sedan
upp-hängd i en ställning med kedjor. Kedjorna löper runt
kedjehjul monterade i ändarna på två axlar (se figur 2.1). Den nedre axeln är via en utväxling förbunden med en
hydraulisk servomotor.
Motorns vridningsvinkel- och vridningsvinkelhastighet
har återkopplats på sådant sätt att ett
positionsservo-system erhållits. Med en elektrisk börvärdessignal till servosystemet kan karossens vertikala position (ärvär-det) regleras. Med hjälp av ett digitalt nät som gene-rerar en sekvens av höga och låga spänningsnivåer, samt lågpassfiltrering av denna sekvens, genereras ett synte-tiskt brus vars frekvensinnehåll liknar vitt brus upp till en valbar brytfrekvens (se kapitel 4). Detta brus
jämförs med den återkopplade signalen för hydraulmotorns
läge i en servoenhet. Skillnaden mellan dessa benämns felsignal. Från denna enhet förses en servoventil med en kontrollsignal, vilken har en amplitud proportionell mot felsignalen. Kontrollsignalen påverkar ventilen
vilken i sin tur påverkar motorn att vrida sig så att
felsignalen minskar. När felsignalen blir noll blir även kontrollsignalen noll och motorn står i ett visst läge. Se figur 2s2.
På detta sätt styr brusgeneratorn den hydrauliska motorns
rörelser vilka överförs till bilkarossen och där
upp-levs som vertikala stokastiska rörelser. Bruset kan
varieras; från brus med en högsta frekvens på 5 Hz upp
till 30 Hz. I servoenheten finns möjligheter att addera
en offsetspänning till bruset samt en reglerbar
förstärk-ning, vilket medför att karossrörelseamplituder upp
0,3 m kan erhållas. På dessa sätt kan olika typer a v vibrationer simuleras. Vägojämnhetssimulator
Fig 2.1
VTI RAPPORT 184Hydraulisk kraftkälla
serVO- Kontroll Hydraulisk
enhet
i)
motor
Feedback m |I
i Brus- " n i I' [generator I l Lagesavkannlng <6 ._Elg 2.2
Servosystem Vibrationsgenerering
VÄGPRESENTATION
Den kanske viktigaste delen av en bilsimulator är att den ger en försöksperson ett visuellt intryck av bil-körning. En filmprojektor projicerar en film på en duk som är placerad framför motorhuven. Filmen, en s k
evig-hetsslinga, visar körning på en relativt rak väg. Med
hjälp av en stokastisk lågfrekvent brussignal (se kapitel 4) och en motor vrids projektorn med små utslag (max
150) i sidled. Detta ska symbolisera bilens kursändring
exempelvis på grund av vindar. Försökspersonen ska
kom-pensera för dessa rörelser i bilden framför honom med
hjälp av bilsimulatorns ratt.
Projektorn kan styras på två olika sätt:
1) genom ett integrerande system där ett givet rattut-slag ger en kontinuerlig ökning av projektorns vrid-ningsvinkel
2) genom ett reglersystem där ett givet rattutslag mot-svarar en viss bestämd vridningsvinkel hos projektorn.
System l) efterliknar förhållandet vid bilkörning; ett fixt rattutslag ger en kontinuerlig girrörelse. System 2) används endast om man vill styra projektorns rörelser på ettabsolutsätt. Man kan då alternativt ersätta sig-nalen från rattutslaget med en extern funktionsgenerator.
I system 1) går en signal från en givare som känner av
rattutslagen till en summationsenhet där rattutslag och brussignal adderas. Denna signal styr riktning och hastighet hos den motor som vrider projektorn.
I system 2) tas först skillnaden mellan en återkopplad lägessignal för projektorn och rattutslaget innan brus-signalen adderas. Sedan styrs projektorn på samma sätt som i fall 1).
Man kan även nu med ett givet rattutslag kompensera ut
brussignalen. Nu ställer man dock projektorn i bestämda
lägen genom olika rattutslag.
Skillnaden mellan de bägge systemen består alltså
en-dast i att man i system 2) återkOpplar läget för
pro-jektorn och tar skillnaden mellan detta värde (ärvärde)
och rattutslaget (börvärde). När ärvärde och börvärde
överensstämmer blir styrsignalen = 0. Man skiftar mellan
systemen med hjälp av en strömbrytare vilken kOpplar in
resp ur projektorns
lägessignal (feedback signal) till
en subtraktionsenhet. Då feedback signalen är urkOpplad
kommer signalen från rattutslaget att gå oförändrar
ge-nom subtraktionsenheten, och en kontinuerlig vridning
av projektorn erhålls. Systemet illustreras i fig 3.1.
Brus- I
generator I
Ratt-utslagStyrsignal
MotorProjektor-l- - - ål
Fig 3.1
Styrsystem för filmprojektor
VTI RAPPORT 184 4 Feed-back On/Off Läges-avkänning
STOKASTISK BRUSGENERERING
Det stokastiska brus som används för styrning av
karos-sens vertikala rörelser och filmprojektorns horisontella
rörelser genereras av en brusgenerator bestående av ett
synkront sekvensnät och ett lågpassfilter. Sekvensnätet
åstadkommer en sekvans av 1:or och 0:or (=höga och låga
spänningsnivåer) som av en iakttagare tolkas som
slump-mässig. Nätet kallas PRBS-generator (Pseudo Random
Binary Sequence) och ser i sin allmänna form ut enligt
fig 4.1.
Lklocksignal
Fig 4.1
PRBS-generator
Vektorn st innehåll (= q1, qz, . e . . o ..qp) återkopplas
till ingången via en serie modulo 2 grindar. Med p st
ingående d-vippor kan ZP st olika tillstånd för vektorn
Q definieras. Med ett lämpligt val av vektorn A==(a1,
az, . o o . ..ap) är det möjligt att låta Q anta 2Pn1 olika
tillstånd, för att sedan återkomma till
ursprungstill-ståndet,
Det enda ej tillåtna tillståndet är Q==(0, O, o . a . . °.0)
ty då avstannar sekvensgenereringen vilket lätt inses
genom figuren Q==nollvektorn medför att insignalen till d-vippa nr 1 blir 0 och tillståndet för Q förblir
oförändrat efter varje klockpuls.
Utsignalen från PRBS generatorn kommer anta en given
binär sekvens vars period blir lika med antalet
till-stånd för Q dvs 2P-l. Denna signal, P(t)
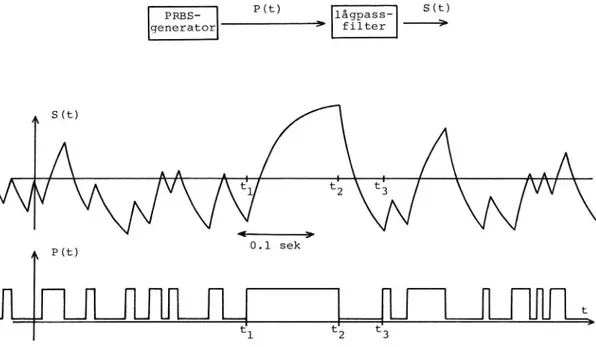
lågpassfiltre-ras och man erhåller en signal S(t) enligt fig 4.2.
o S(t) PRBS- P(t) lagpass-generator i= filter __-*> S(t)
/\
V
/\
V/L
M WVL M M \
0.1 sek M T P(t)JLTLFW
;gi HIUUL
rFig 4.2 Signal från PRBS samt efter lågpassfiltrering.
Bergdahl 1974.
10
S(t) kan ses som en normalfördelad signal med
medelvär-de och varians. Frekvensinnehållet i medelvär-den binära
signa-len är ett linjespektrum, fig 4.3. Lågpassfiltrets
bryt-frekvens, fo, rekommenderas att vara á% av generatorns
klockpulsfrekvens, fc. Den filtrerade signalens spektrum
Visas i fig 4.4.
A
_ _. T_.n _ -1* / H I
\/r FIK > f [Hz] l 2 _ 3 f __;LNAT NAT NAT
C _AT
P
N
==antalet bitar per period = (2 =l)
fo==skiftregistrets klockfrekvens
T
==N-AT = signalens periodtid
Fig 4;;
Frekvensspektrum för den binära signalen.
Bergdahl 1974.
A
'Hr-- 7-\T
I\
|
|\
| \.L |\
å f [Hz]
1
2
\
n- -_N T NAT
fo\
Fig 4.4
Frekvensspektrum filtrerad signal. Bergdahl 1974.
11
I båda de generatorer som används, till hydraulservo-systemet respektive till filmprojektorn, har skiftre-gistrets längd valts till 15 bitar. Vektorn A har valts
med hjälp av tabellverk. Dock har A inte valts lika för
att eliminera att ett likartat brus uppträder samtidigt hos de båda generatorerna. Detta skulle ske om start-läget för sekvensnäten var lika. Figur 4.5 visar nätens utseende; i generator I (= den för vertikalrörelse av
karossen) har A valts till (0,0,0,0,l,0,0,0,0,l,l,O,l,l,l).
PRBS generator I
PRBS generator II
Fig 4.5 Skiftregister
12
Med hjälp av tryckknappar kan filter med olika
brytfrek-venser kopplas in. Dessa reglerar samtidigt
skiftregi-strets klockgenerator så att klockfrekvensen fC alltid
är en faktor 20 gånger större än filtrets brytfrekvens
fo, fig 4.6. Frekvensval / \ \
Klockgen
/ /
x \
\ /' f"-Iwu ,/
01
' I\«t
\ fC _/ Filter 1 I . I f02 IPRBS'Gen
Filter 2 _--a 0-(4-0--4
f I
06
v Filter 6w
ig 4.6
System vid val av brytfrekvens
De valbara filtren är aktiva lågpassfilter av andra
ord-ningen. Innan signalen tas ut passerar den efter varje
filter en reglerbar förstärkare (fig 4.7). Ett exempel
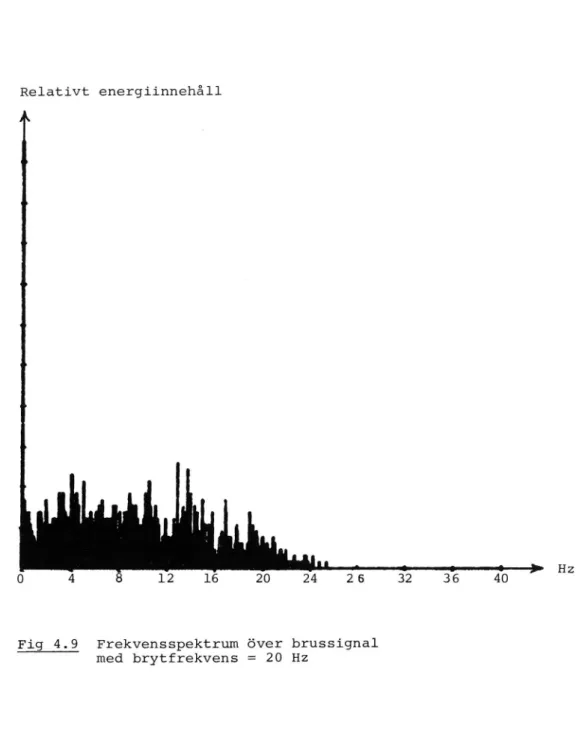
på brussignalen där fo==20 Hz Visas i fig 4.8 och dess
frekvensfördelning i fig 4.9.
VTI RAPPORT 18 4
F
r
ån
P
R
B
S
F i l t e rF
i
g
4.
7
F ör s t är k a r eLåg
pa
ss
fi
lt
er
+
F ör s t är k a r eU
t
s
i
g
n
a
l
(
s
yn
t
e
t
i
s
k
t
br
us
)
13
14
[V]
1.001r Ah . \-.804
v -l.004Fig 4.8 Utsignal Brusgenerator Brytfrekvens :20 Hz
15
Relativt energiinnehåll A
A
Fig 4.9 Frekvensspektrum över brussignal med brytfrekvens = 20 Hz
VTI RAPPORT 184
V
16
PRESTATIONSREGISTRERING
Nedan beskrivs ett stimulus- och registreringssystem vilket för närvarande används vid studium av
presta-tioners samband med vibrationer.
Ett antal olika givare finns för att olika parametrar ska kunna studeras. Datainsamling sker med hjälp av en
dator, PDP ll/05. Datorn styr
även två
överrasknings-situationer (stimuli) varefter vissa reaktionstider hos försökspersonen (i fortsättningen kallad fp)
upp-mäts.
Stimulus].består av att en strålkastare framför
motor-huven tänds (symbol för ett mötande fordon på
kolli-sionskurs). Fp ska reagera med att bromsa så snabbt
som möjligt.
Stimulus 2 består i att en lampa, som endast kan
upp-täckas genom backspegeln, tänds (symbol för ett utryck-ningsfordon som vill köra om). Fp ska då omedelbart sänka farten till ett värde under 60 km/h.
Datorn sköter om en kontinuerlig datainsamling av pro-jektorrörelser, gaspådrag samt pulsfrekvens hos fp under perioderna mellan stimuli. Fp ska med hjälp av ratten kompensera för de störningar som brussignalen ger upphov till (kap 3). Rörelserna hos projektorn ger via en vridpotentiometer upphov till en varierande lik-spänning. Under ett förförsök utan inverkan av stokas-tiska störningar på projektorns vridningsvinkel registe-ras ett värde vilket utgör en nollnivå, dvs ett läge
där projektorn hela tiden står så att "bilen" ligger i
ett rakt spår på vägen.
Signalen från projektorläget samplas i datorn och ett RMS (Root Mean Square) värde beräknas enligt följande:
Från varje sample subtraheras nollnivån, resultatet
17
kvadreras och summan av kvadraterna beräknas. Slutligen dras roten ur summan. Olika personer kan ha olika
upp-fattning om vad
som är mitten på vägen. Därför dras
från det beräknade RMS-värdet absolutbeloppet av
sig-nalens medelvärde som kompensation om någon person le-gat konstant snett på vägen. Detta kompenserade
RMS-värde utgör ett mått på hur väl fp lyckats eliminera
störningarna. Ju lägre värde desto mindre absoluta
rö-relser hos projektorn.
Gasreglaget styr en skjutpotentiometer vilken levererar en varierande spänning. Denna spänning styr en motor Vilken vrider hastighetsmätarvajern. Således ger ett visst läge på gaspedalen ett visst utslag på hastig-hetsmätaren. Spänningen registreras också av datorn och RMS beräknas. Gaspådraget som motsvarar hastigheten
90 km/h utgör nollnivån vid RMS-beräkningen.
RMS-vär-det talar i RMS-vär-det här fallet om hur väl fp lyckats hålla
en konstant fart av 90 km/h.
Fp:s puls registreras med hjälp av en fotocell som mäter
ljustransmissionen i örsnibben. Vid varje pulsslag
minskar genomsläppligheten. Denna information förstärks och kvantifieras i två lägen. Periodtiden för denna signal är lika med periodtiden för pulsfrekvensen.
Med förprogrammerade intervall aktiverar datorn de två överraskningssituationerna. Efter stimulus l uppmäts
fyra tidpunkter:
1) Då gaspedalen passerar läget 80 km/h
2) Då fp släpper gaspedalen
3) Då fp har sin fot över bromspedalen
4) Då full bromskraft uppnåtts
Detektering av tidpunkt 1) och 2) sker med hjälp av
signalen från gaspådraget. Datorn vet vilka nivåer som
18
motsvarar olika hastigheter. Tidpunkt 2) registreras
när gaspådraget = 0. Tidpunkt 3) uppmäts med hjälp av
en fotocell placerad så den registrerar när foten pla-ceras över bromspedalen. Hydraulsystemet till bromsen
finns till viss del kvar. I änden på det enda
broms-röret utgående från huvudbromscylindern finns en tryck-givare monterad. Givarsignalen förstärks och går till datorn. På detta sätt kan tidpunkt 4) registreras när
ett visst bromstryck uppnåtts.
Efter stimulus 2 uppmäts endast två tidpunkter; tid
till 80 km/h och tid till 60 km/h. Dessa registreras
på samma sätt som efter stimulus l, dvs med hjälp av gaspådraget. Under överraskningssituationerna registre-ras även projektorrörelserna precis som under perioderna mellan stimuli. I fig 5.1 nedan illustreras
datainsam-lingssystemet i form av ett blockschema.
Ett exempel på datautskriften visas i figur 5.2. Först
redovisas det totala antalet stimuli under ett
körför-sök, sedan läget i tiden för dessa, samt ordningsfölj-den. Efter varje körperiod skriver datorn fp:s
medel-pulstid, medelvärde + RMS-värde av projektor- och
gas-avvikelserna (ratt resp gas i utskriften). De olika reaktionstiderna skrivs ut efter varje stimuli. Slut-ligen skriver datorn totalmedelvärden av samtliga sig-naler efter försöket.
Med hjälp av data från stora försöksgrupper, vilka
utsätts för olika typer av vibrationer, kan statistiska modeller byggas. Därur kan konstateras huruvida någon grupp uppvisar trötthetseffekter, prestationsförsäm-ringar etc. Registreringssystemet kan modifieras.
Andra typer av situationer kan skapas och andra
para-metrar kan studeras.
DATOR Utskrift av data
__I
I?
projektor-rörelser \ '\ _ \ 4 Stimulus 1 l' N N § N\
\. \ \ \ I\
lhastighetl
\
\
broms-beredskap
I
/
j Försök sper son
i _' I alStimulus 2 | 'Fig 5.1
Datainsamlingssystem
VTI RAPPORT 184bromsning
V8 1 lH Od dV H Il A EI E' U SM E Eüt 'l -HH 3H :1 18 8 U1 11 11 US H HN ü t' IB 3 H3 1 H1 11 11 09 H HH E ååt' 3 H3 1 13 ñN1 3ñ1 3 át9 'ü SM E EI I' B HH 3H :1 18 5 H3 3 EE E' U EN UäH 11 11 E1 1 H3 3 üSå' ü dH HS H3 ä3H 11 11 E1 1 ü11 11 11 US H HN ü E' Si 3 H3 ü11 11 11 eå dl ü Eüå' 3 H3 I SH 1H N1 13 H3 3 36 9' 0 E1 13 1n d HS :S 3H NH D- S' SB E SM n tåâ' 9ñ9 '1 :ua Eäü' ü-HH 3N :1 18 3 QH dH üüIü3 üåuaän 13 u3u1 31 01
M33
459
'0
a11
31n
d
S
:SH
HEM
'ü-
tEt
:ua
'0
359
üEt'
E
:ua
ådå'
t-HHB
H
:11
53
ad
unxa
b
EU S' U :ua SS B' U HH 3M :1 1H ä U1 11 11 ä3H U3 HS dH U S' IU 3 H3 1 U1 11 11 H UH SH ü 6' f= 1 1 H1 11 11 US H HN ü S' Bb 3 H3 1 H1 11 11 ü13 dd 0 9' I SH WH NI LE H3 3 ;L 3 H3 EE H3 3 Iüä' ü U1 1S 1nd I IHE =IS 4 831 - 'I Tt' t-'E -lä SSL EI d' Hr'
7 E' I SM E ?S E' U-HH 3M :1 18 3 d Iä3 UD E [åd 'ü SM E EE Q' U-NH 3M :1 1H H ü11 11 11 ä3H H3 HS dH ä'ü UQ 3 H3 ü11 11 11 H UH SN â'n dg 3 H3 H3 3 Sáâ' ü 33 01 3 11 11 UI 1 H3 3 IU E' U HH H US 11 11 ü11 N1 1H SH I 1S H3 3 #9 9' 0 UI 13 1H d HS :S 3M HH - 'U SÅE E SM ü'ü Ed 39 8' n EH H SE E' U HH 3H :1 1H ä üüIä3 3 d tåâ' ü SM E US S' E HH 3H :1 1H ä ü11 11 11 D? H HM U E' EE 3 H3 üIl 11 11 09 H HN t Såü' 3 H3 SH 1H N1 13 |_'|_ j n H3 3 56 9' ü HI 1E 1H d 59 :3 3H HH '3- SS E SM U I' ES 'B U' I :wa 89 1' 1 HH 3H :1 1H ä d üüIä3 I 1äH 1E 1H 3H 11 1 H1 = 31 üü=üü= H üü=U I= E = UI 11 H1 E 15 15 3 3N 3h H3 E 31 0: :8 00 00 :9 0: 31 00 :5 0: 31 00 :3 02 3 ä3ü1 1 1H 1H 3 11 HN 11 = t H
OZ
21
SÄKERHETSANORDNINGAR
Ett antal säkerhetsbrytare finns inom systemet för vibrationsgenerering. En gränslägesbrytare känner av
karossens rörelseamplitud. När denna överstiger ett
visst värde avbryts vibrationsgenereringen. Vidare finns en flyttbar nödbrytare som kan placeras antingen i simulatorn hos försökspersonen eller hos försöksle-daren. Bilens signalhorn har ersatts med en vanlig ringklocka. Genom denna kan försökspersonen alltid
påkalla försöksledarens uppmärksamhet, som då vid
be-hov kan avbryta försöket.
22
MÄTNING AV PÅKÄNNING. ISO STANDARD 2631
ISO standard 2631 är en norm för uppskattning av risker
och innefattar en definition av olika
exponeringsgrän-ser när en person utsätts för mekaniska vibrationer.
Normen har framtagits för att kunna ge objektiva,
jäm-förbara resultat vid uppskattningar av vibrationer
ut-förda på olika platser vid olika tidpunkter.
I princip kan en människa exponeras för vibrationer på 3 olika sätt:
1) Vibrationer som överförs simultant till hela
kropps-ytan t ex luftvibrationer
2) Vibrationer som överförs till hela kroppen genom kroppens stödyta mot det vibrerande mediet, dvs genom
fötterna om man står, sätet om man sitter etc
3) Vibrationer som endast överförs till speciella delar
på kroppen t ex vibrerande handtag, pedaler etc
ISO-normen behandlar i huvudsak vibrationer i fall 2) ovan. För vibrationer av denna typ definierar normen
gränsvärden för exponeringstiden vid tre olika
kri-terier. Dessa är:
1) Komfortnedsättning
2) Prestationsnedsättning
3) Hälso- eller säkerhetsrisk
Den maximalt tillåtna exponeringstiden beror på vilket
av ovanstående kriterier som skall tillämpas, samt vibrationsriktningen. Beträffande definition av de olika riktningarna se fig 7.1.
23
z///x/:WáW/'y//øW/Zá
i
' ' "' ' ' x /./,," ;',/////////Ã '7/2 47." LIA///A . / A I / ' Å //Ä\
/áf /' [7 ,i 7/ .A77 2,'Åáøyuá/á/;/
Fig 7.1 Definition X-riktning Y-riktning Z-riktning VTI RAPPORT 184 av riktningar:från rygg till bröst
från höger till vänster sida
från fot till huvud
24
I figur 7.2 visas gränser för de vertikalaccelerationer som en person maximalt kan utsättas för innan presta-tionsnedsättningar inträder. Diagrammet visar gränsen för vertikalaccelerationen vid olika frekvenser och olika exponeringstider. Varje gränskurva representerar en
maximalt tillåten exponeringstid. Om man i stället vill
erhålla komfortnedsättningsgränsen divideras accelera-tionsvärdena med 3,15 (10 dB lägre), och om man vill ha hälsoriskgränsen multipliceras accelerationsvärdena
med 2 (6 dB högre).
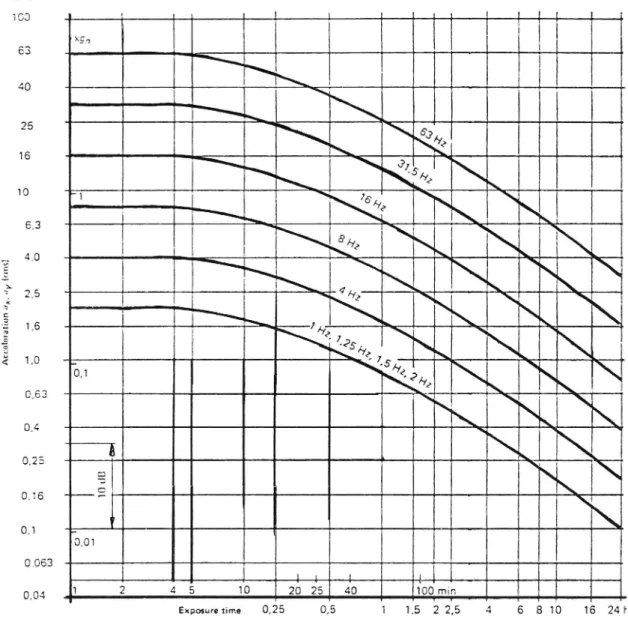
Figur 7.3 innehåller samma information som figur 7.2 men här representerar de olika gränskurvorna i stället vibrationsfrekvensen och den maximala exponeringstiden
återfinns på X-axeln.
Fig 7.4 och 7.5 är motsvarande kurvor för horisontal-accelerationer DO-och Y-riktning). Även här gäller att accelerationsvärdesgränsen ligger 10 dB lägre för
kom-fortnedsättning och 6 dB högre för hälsorisker.
Vibrationerna som uppkommer i simulatorn har uppmätts vid olika skakamplituder och skakfrekvenser. Vidare har belastningen, dvs försökspersonenstyngdq'varierats. Vid mätningarna användes en accelerometer, som place-rades i simulatorn, samt en digital frekvensanalysator.
Vid de olika försöken upptogs RMS-värdet av accelerationen
inom varje tersband från 1,6 Hz till 80 Hz. Dessa vär-den uttryckta i dB relativt l-lOu5
rekt på hålremsa för vidare behandling. I huvudsak
be-m/sz, stansades
di-handlades den vertikala vibrationsriktningen (Z-rikt-ningen). X- och Y-riktningarna behandlas endast i var
sitt försök med en given övre vibrationsfrekvens och
amplitud.
25
E E LD m m 5 O LO m m w LD C (D ?3'3, m 0 m 0_ c_ --_ m_ 0_ 4.0_ 04. ca_ ca_ en_ m_ v_ mg 01. N_ v-_ v: *5 ca :2 m' 0 :5 05 m u:- n ha m - v- »- o o o o o o o o 0
_, N qu- v-
v-(suu) Ze uogxmmeaav
gig 7.2 Gränser för vertikalacceleration som funktion av frekvens och exponeringstida Gränserna gäller
för prestationsnedsättningar. ISO standard 2631,
1978. VTI RAPPORT 184 0, 1 f re k ve n s 80 63 20 25 31 ,5 40 16 10 8, 0 0, 03 0, 8 1, 0 1, 2 1, 6 2, 0 2, 5 3, 15 4, 0 0, 5 |0 ,0 16 0, 4
A c c o le m üm m l (s ms ) DJ m/s 100 63 40 25 0,63 0,4 0,315 0,25 0,16 0,1 0063 0,04
26
10 Xgn 1-_q_ - _---b---_L__._
-__4.O'
10 (1 13 än . Q 1 0Fig 7.3
I 1 ' 1 L 4 I 5 101 20 25 7100 minI _ H _ -1 v' Exposure time 0,25 0,5 1 1,5 2 2,5 4 6 8 10
Vertikalaccelerationsgränser som funktion av
exponeringstid och frekvens. Gränserna gäller för prestationsnedsättningar. ISC standard 2631, 1978.
VTI RAPPORT 184
27
O O d B m *ti 0 H H 90d B 8 0 d B Q M S Q I Z S LO M N (9_ .-5 o 5 0 4 3 005 O A O 0 2 5 0 2 0 O J G m m m o m q q M N m - F o m å? 20 m U5 w RO Q3 (sun) 2 e uonempaavgig 7.4 Horisontalaccelerationsgränser som funktion av frekvens och exponeringstid. ISO standard 2631, 1978. VTI RAPPORT l 8 4 O J O 80 G! 40 3 L 5 H) m U 5 W 8 D R 3 Fr eq ue nc y ar ce nt rut ro quo nc y of lh hmlo ct avo lun uL H z U'I 3 J 5 4 0 l b 1 0 15 04 op 05 3 Q8 Lo O M G
Ac uo lm al iun 0, , ny (n ns ) 10 6,3 4,0 10 4 5 0,25 0,5 Exposure time
Fig 7.5 Horisontalaccelerationsgränser som funktion av av exp.tid och frekvens.
1978. VTI RAPPORT 18 4
28
m 1 1,5 2 2,5 4 ISO standard 2631,29
Resultat av de försök som gav upphov till de kraftigaste
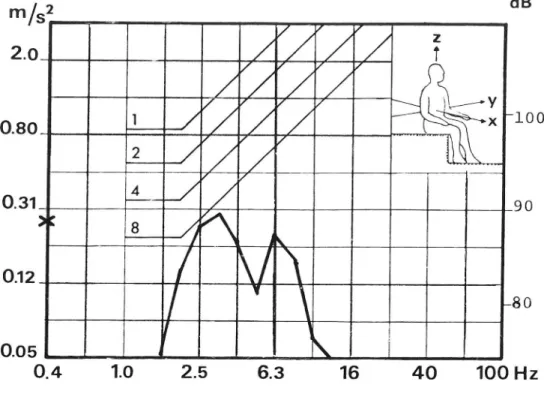
vibrationerna visas i fig 7.6.
a) är resultat från vibrationer i vertikal riktning där
insignalen har en övre gränsfrekvens på 5 Hz
b) dzo men med en övre gränsfrekvens på 20 Hz.
Försökspersonens vikt var i bägge fallen 57 kg. Den
heldragna kurvan representerar RMS-värdet av
accelera-tionen vid olika frekvenser, uppmätt i förarstolen. Den
streckade representerar den acceleration som uppmättes
på bilsimulatorns golv. Gränsvärdeskurvorna
represente-rar den maximalt tillåtna exponeringstiden innan
presta-tionsnedsättningen gör sig gällande. Skillnaden mellan
det accelerationsspektrum som uppmäts på golvet och det
som uppmäts i förarstolen utgör stolens
överförings-funktion. På detta sätt kan man t ex jämföra olika
bil-stolstyper. I fortsättningen kommer dock endast
resul-tat från de accelerationer som uppmäts i förarstolen
att redovisas.
Fig 7.7 är resultatet av vertikalaccelerationer där
försökspersonens vikt var 80 kg, och fig 7.8 är
motsva-rande resultat för en försökspersons vikt av 100 kg.
I fig 7.9 visas resultat av horisontella accelerationer
(X- resp Y-riktning) där försökspersonens vikt var 80 kg.
Ur kurvorna kan man dra slutsatsen att försökspersonens
vikt inverkar på det svängande systemet; högre vikt
medför en mindre bandbredd.
Man kan i stället för att beräkna rms-värden för acce-lerationen vid diskreta frekvenser beräkna ett
samman-vägt värde,
etts k bredbans-rms-värde.
Detta värde kan beräknas på två sätt; a) direkt ur
tids-signalen enligt formeln:
T
2
a
= 1/T
J
aw
(t) dt
O
a)
b)
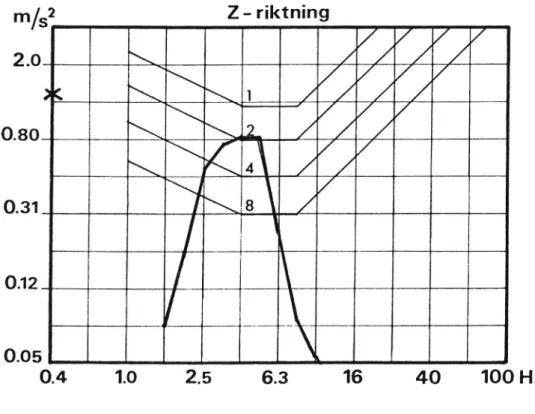
Fig 7.6 Tersbandsanalys.30
m/S?
Z - riktning
dB
//2.0i
\\
//5/:///
'
\\\1////
-x
_ 1
0.80
, \ /////
OO
\\\_
,I 4 \
V///
0.31
I 8
/
90
l
\.
"i
0.12
LI
\ \_
,I
\\
_ 80
RÅX r/X\\0.4
1.0
2.5
6.3
1\\ 40\ 100 Hz
\xm/sz.
_
dB
/
/
2.0 I
\\
//5/////
Ja
< \\\f\\\\\> 1
/å///l///////
0.80
rf? /////
x
00
\
I' 4\\ / /
\
/
0.31
,' 8
/
in
90
lg' x&»\y#$t/f x0.12
l
\
kx
/
1\ -8
\ \ O(105
A?
N\\
\.
ii;-O.
4
1.
0 x, 5
l 2.
6 3
.
16 U0 v00 Hz
Försökspersonvikt = 57 kg
a) insignal max 5 Hz b) insignal max 20 Hz Heldragen kurva = rms-värde av accelerationen uppmätt i förarstolen. Streckad kurva = rms-värde av accelerationen uppmätt på golvet i simulatorn.
Siffrorna ovanför platåerna i gränskurvorna
be-tyder maximalt tillåten exponeringstid innan
prestationsnedsättningar förekommer.
31
m/S2
Z - riktning
/
2.0'
\\
//5/:/;/
\\\1
4/ / / /
/ / /
0.80
/ / /
\\
/ /
\
4
//
0.31
8\ /
/
\
0.12
/
\\
0.05
0.4
1.0
2.5
6.3
16
40
100 HZ
m/S2
7
2.0
\\
//////:/
\\\ 1
j///////
0.80*
2
/ / /
/ /
\
ü
//
0.31
/
8
/
0.12
1/
\\
0.05
\
0.4
1.0
2.5
6.3
16
40
100 Hz
Fig 7.7 Tersbandsanalys. Försökspersonsvikt=80 kg
a) insignal max 5 Hz b) insignal max 20 Hz
Kurvan Visar rms-värde av accelerationen Vid olika frekvenser.
32
Z- riktning
/
2.0
\\
/zç/:///
L
\\\ 1
4/ / / /
\
/ / /
_
0.80
2
/ / /
/ /
\
J
71
//
0.31
7
8 \ /
0.12
/
\\
0.05
\
0.4
1.0
2.5
6.3
16
40
100 Hz
m/33Z
/
2.0
\\
//////M/V
\\\ 1
J///////
0.80
2
/////
"'
\\ a i. J//
0.31
8 \ /
0.12
\
0.05
\
0.4
1.0
2.5
6.3
16
40
100 Hz
Fig 7.8 Tersbandsanalys. Försökspersonsvikt = 100 kg
a) insignal max 5 Hz b) insignal max 20 Hz. Kurvan Visar rms-Värde av accelerationen vid olika frekvenser.
0.80
0.31
012
0.05
0.4
1.0
2.5
6.3
16
40
100 Hz
dB
m/s2.0
100
(180
0.31
90
0.12
80
0.0
4
1.0
2.5
6.
16
40
100 Hz
0.031
Fig 7.9 Tersbandsanalys horisontella riktningar. Försöksperson Vikt 80 kg. a) X-riktning
b) Y-riktning. Kurvan Visar rms-Värde av acce-lerationen vid olika frekvenser.
34
b) ur tersbandsspektrum enligt formeln:
a
= accelerationen viktad med hjälp av ett filter
med karakteristik enligt gränskurvorna, fig 7.2
och 7.4
T = integrationstid
S(f)
effekttäthetsspektrum som funktion av frekvensen
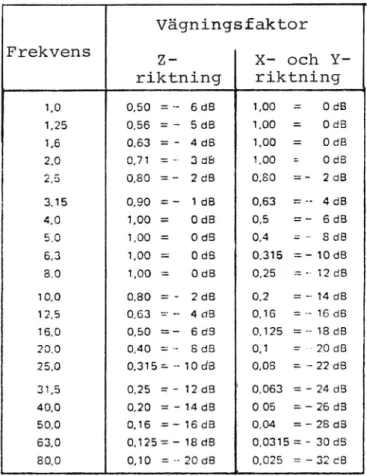
Bredbands rms-värdet har beräknats enligt metod b) för
frekvenser mellan 1,6 och 80 Hz. Accelerationsspektrum
viktas först med faktorer enligt gränskurvorna. Fig
7.10 visar dessa Värden. Därefter omräknas
accelera-2
tionsspektrum från dB till enheten m/s . 1 m/s2 rms
uttryckt i dB från frekvensanalysatorn registreras som
dB
kal
.
bandsfrekvens sker nu enligt följande:
Omräkningen från dB till m/s2 för varje
ters-dB - ters-dBkal
20
aw = 10
I det diskreta fallet blir bredbandsvärdet
i
18
5-*
I vårt fall arms = ._2 aw 1-1 f.1
där a . . . .. a är det Viktade rms-värdet vid
wf1
wf18
varje tersbandsfrekvens med början vid 1,6 Hz upp till
80 Hz.
35
Det bredbandsvärde som erhålles i m/s2 används dels som ett relativt mått mellan olika vibrationer och dels för att uppskatta maximal exponeringstid för dessa. Vid vertikalaccelerationer använder man platånivåerna i fig 7.2 eller 4-8 Hz kurvan i fig 7.3 som gränsvärden.
Bredbandsvärdena för de vibrationer som redovisas i fig 7.6 - 7.9 har markerats i respektive figur med ett x på accelerationsaxeln. I fig 7.6 gäller bredbandsvär-det för de accelerationer som uppmätts i förarstolen. Det visar sig att bredbandsvärdet ger genomgående en lägre toleranstid för vibrationerna än vad analysen av accelerationen inom de olika tersbanden ger. För
närvarande diskuteras införandet av en
korrektionsfak-tor för att ge bättre överensstämmelse mellan de båda
metoderna.
Resultaten för alla försöken redovisas i fig 7.ll. Amplituden på vibrationerna hos simulatorn varierades
från 1% till 5% av maximal skakamplitud (0,3 m). Den maximala frekvensen hos bruset gavs två olika värden: 5 Hz resp 20 Hz. Slutligen varierades också
försöksper-sonernas vikt: 57, 80 resp 100 kg.
Det visar sig att alla dessa tre parametrar påverkar bredbandsvärdet, och därmed den maximalt tillåtna ex-poneringstiden. När en försöksperson (med en given vikt) ska utsättas för en given exponeringstid motsvarande ett givet rms-värde ger tabellen i fig 7.ll underlag för beräkning av den maximala amplitudinställningen.
36
Vägningsfaktor
Frekvens
Z_
X_ och y_
riktning riktningLo
050 =-- 6dB
Loo =
oas
L25
056 =- 508
Loo =
008
Le
063 =- 4d8
Loo =
OdB
20
071 :nu 3dB
Loo =
008
25
080 =- ?dB
080 =- 208
3J5
090 =- 1dB
063 =-- 4dB
40
Loo =
008
05
=- 6d8
50
Loo =
008
04
=
SdB
03
Loo =
OdB
0315 =-10d8
ao
Loo =
OdB
025
=-'12dB
100
030 :0 ?dB
02
=-4ads
125
063 2-. 409
016 =--16d8
100
050 =- 6dB
0125 =--18dB
200
040 =-- 8dB
01
= -2000
250
031sau10da
008 .=-2208
31,5 0,25 =-12d8 5 0.063 =-24 dB400
020 =-14d8
005 ==-2eds
500
ons =-1eda
(nu =-28d8
600
OJ25=-18d8
0mn5=-3Ods
800
010 =--20d8
0025 2-32c8
Fig 7.10
Vägningsfaktorer för olika frekvenser.
ISO-normer 1978.
37
Försök Amplitud Frekvens Försöks- Bredbands- Kommentar (%) (Hz) personens värde vikt (m/s ) (kg) 1 1 5 80 0,26 2 1 0,24 3 1 0,23 4 2 0,55 5 3 0,80 6 4 1,18 7 5 1,38 8 5 1,44 redovisas i diagram 9 1 20 0,17 10 2 0,41 11 3 0,66 12 4 0,87 13 5 1,10 redovisas i diagram 14 5 5 100 1,29 15 5 5 1,22 redovisas i diagram 16 5 20 0,93 redovisas i diagram 17 3 5 0,73 18 5 5 57 1,60 redovisas i diagram 19 5 20 1,33 redovisas i diagram 20 3 5 1,03 21 5 5 80 0,05 Y-riktn redovisas i 22 5 5 80 0,28 X-riktn diagram
Fig 7.11 Tabell över RMS-bredbandsvärde vid olika vibrationsförhållanden.
38
UTVECKLINGSMÖJLIGHETER
Ett flertal tillämpningar av simulatorn är tänkbara. Nedan kommer i punktform ett antal tänkbara
tillämp-ningar att föreslås:
1-
åimgleäigg_êy_§pegiella_Yägay§Qi§:
VTI, Saab-Scania och vägverket bedriver ett samarbete för framtagande av ett integrerat mätfordon, Saab Road Surface Tester (Saab RST), en bil utrustad för mätning av ett flertal parametrar av vägbeskaffenhet bl a vägojämnheter. Se Arnberg, Magnusson och Ohlsson 1979. Dessa mäts med hjälp av en accelerometer, fäs-tad på ett i vertikalled rörligt mäthjul. Den signal vilken utgör mäthjulets vertikalacceleration bil-das över en given mätsträcka och ett speciellt rms-värde erhålls beroende av vägsträckans beskaffenhet samt hastigheten vid registreringen. De erhållna
rms-värdena kan sedan överföras till en skala där man tar
hänsyn till hastigheten vid mätningen. Denna skala där vägar klassificeras, föreslås bli nio-gradig där nio
står för mycket ojämn väg och ett för extremt jämn
väg. Skalan är alltså hastighetsoberoende och ger en uppskattning av vägavsnittets standard med avseende
på jämnheten.
I samband med accelerationsregistrering av mäthjulet hos Saab RST har även accelerationsmätningar i
förar-stolen på en annan bil utförts. Således kan ett
sam-band dras mellan de accelerationer som uppmäts vid
mäthjulet hos Saab RST och de accelerationer som en
förare av en speciell biltyp utsätts för.
När ett vägavsnitt har klassificerats med hjälp av
Saab RST vet man vilka accelerationer vägen åstadkommer vid mäthjulet i olika hastigheter och därmed även
vilka accelerationer som föraren i en speciell bil
39
utsätts för. Med hjälp av vägojämnhetssimulatorn kan liknande stokastiska accelerationsnivåer återskapas och man kan därigenom studera olika vägars påverkan
på
en förare i en kontrollerbar laboratoriemiljö.
Ett alternativt sätt att återskapa vibrationerna på ett speciellt vägavsnitt är att spela in acceleratio-nerna som erhålls i förarstolen vid körning på den vägen. Man ersätter sedan brusgeneratorn med denna signal och styr (efter lämplig förstärkning)
vibratio-nerna i simulatorn på detta sätt. För att kunna erhålla
lämplig förstärkning måste signalens rms-värde beräk-nas för att kunna ge samma styrka på accelerationerna i simulatorn.
2. 9292922229_sy_bêeêikê999::9§:9299
Speciell handikapputrustning, monterad i bilar, kan tänkas vara känslig för vibrationer. Speciellt åtkom-ligheten av reglage kan försvåras även vid mindre vibrationer.
3.
Fortsatta studier av vägojämnheters inverkan på
bilförare
Manövreringsförmåga, trötthetseffekter, synföränd-ringar m m är aktuella parametrar för vidare studier. Se Arnberg, Carlsson och Magnusson, VTI Meddelande
95, 1978.
40 Äléss_f§§§:s§_kä2§lig䧧_§êä_yi§§ê§isasr
Rent individuella skillnader bland förares känslighet och reaktion på samma typ av vibrationer förekommer.
Huruvida dessa skillnader är kopplade till åldern är
av intresse.
40
5-
Äléäs_fê:§:§§_:§êkfieaêfiéåä
Individuella skillnader i reaktionstider förekommer, men även här liksom i punkt 4 är det av intresse att konstatera ålderns inverkan.
6-
QEPEQYEÅQQ_åY-§§EêEE§E§§êEêljêä
Bilbälten, barn-bilstolar och -kuddar, reglage o dyl
är detaljer som behöver testas med avseende på
håll-barhet och komfort respektive åtkomlighet.
7-
Eêzêä225199_êy_§imglêferg
Simulatorn kan förbättras på ett antal punkter för
att åstadkomma en naturligare "körsituation".
Hastig-heten på den vägfilm som visas är nu konstant. Denna
kan kopplas till simulatorns hastighetsmätare så att
föraren uppfattar den varierande hastigheten genom
men och inte enbart genom hastighetsmätaren. Nya fil-mer måste dock göras där en högre bildfrekvens används, annars kommer bilden att bli "ryckig" vid körning i låga hastigheter. Ett motorljud har inmonterats vars frekvens är kopplat till hastighetsmätaren. Detta
bidrar till att öka intrycket av riktig bilkörning.
Ett nytt program för prestationsregistrering där andra variabler än de i kapitel 5 beskrivna studeras kan relativt lätt konstrueras. Ett speciellt träningspro-gram för handhavande av avancerad elektronisk utrust-ning vid bilkörutrust-ning håller för närvarande på att
fram-tas i samband med utveckling av Saab Road Surface
Tester.
Avslutningsvis kan nämnas att Simulatorn är relativt flexibel; man är inte låst till enstaka tillämpningar. Modifikationer är mest en fråga om programutveckling för datorn som styr och bearbetar mätresultat för
si-mulatorn.
41
LITTERATURLISTA
Arnberg, P W och Åström, G. Vägojämnheters inverkan
på bilförares prestation och trötthet. En
litte-raturgenomgång och ett simulatorexperiment.
Statens väg- och trafikinstitut, rapport 181, 1979. Arnberg, P W, Magnusson, G och Ohlsson E. Mätning vid
hög hastighet av olika vägytekarakteristika. VTI rapport 172, 1979.
Arnberg, P W, Carlsson, G och Magnusson, G. Inverkan
av vägojämnheter. VTI meddelande 95, 1978.
Bergdahl, B-G. Analogdatorprogram för generering och statistisk utvärdering av syntetiskt brus. Sta-tens väg- och trafikinstitut. Internrapport 179,
1974.
Danielsson, P-E. Digitalteknik del 1 - 3, Student-litteratur, Lund 1973.
International Organization for Standardization. Guide for the Evaluation of Human Exposure to Whole-Body
Vibration, ISO 2631, 1978-01-15.
MTS System Corporation. Instruction Manual Model 401.03 Servac, Model 401.32 Input Module. Minneapolis, Minnesota 55424.
Bilaga 1
Sid 1
ENGELSKA FIGURTEXTER Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure Figure VTI RAPPORT7.3
Roadroughness SimulatorServosystem for generation of Vibrations Electric system for twisting the road
film projector
Pseudo Random Binary Sequence-generator, (PRBS-generator). General form
Signal from PRBS-generator before and
after passage of a lowpass filter
Frequency spectrum of the PRBS signal
Frequency spectrum of the lowpass filtered
PRBS signal
The form of the two PRBS-generators used for noise generation
Upper limit frequency control
Lowpass filter and amplifier
20 Hz
Noise signal. Upper limit frequency =
Frequency spectrum noise signal.
limit frequency = 20 Hz Upper Data collection system
Example of result presentation Directions of co-ordinate system x axis = back-to-chest
y axis = right-to-left side
z axis = foot-to-head
Longitudinal (az) acceleration limits as a function of frequency and exposure time;
"fatigue-decreased proficiency boundary".
To obtain "exposure limits" (health or
safety): multiply acceleration Values by 2 (6 dB higher), and to obtain "reduced comfort boundary": divide acceleration values by 3,15 (10 dB lower). ISO standard
2631, 1978.
Longitudinal (az) acceleration limits as a function of exposure time and frequency;
"fatigue-decreased proficiency boundary".
ISO standard 2631, 1978.
Figure 7.4 Figure 7.5 Figure 7.6 Figure 7.7
Figure 7.8
Figure 7.9 Figure 7.10 VTI RAPPORT Bilaga 1Sid 2
Transverse (ax, a ) acceleration limits as
a function of freäuency and exposure
time: "fatigue-decreased proficiency
boundary". ISO Standard 2631, 1978.
Transverse (ax, a ) acceleration limits as a function of exposure time and frequency;
"fatigue-decreased proficiency boundary".
ISO Standard 2631, 1978.
Third-octave band analysis. Drivers'
weight = 52 kg
a. Result when upper limit of input signal equals 5 Hz
b. Result when upper limit of input signal equals 20 Hz
The unbroken line = rms-value of accelera-tion measured in the drivers' seat. The broken line = rms-value of acceleration measured at the floor inside the simulator. The numbers above the acceleration limits stands for maximum exposure time in hours
(fatigue-decreased proficiency boundary)
Third-octave band analysis. Drivers' weight = 80 kg.
a. Input signal = maximum 5 Hz
b. Input signal maximum 20 Hz
The curve gives the rms-value of accele-ration at different frequencies
Third-octave band analysis. Drivers' weight = 100 kg
a. Input signal - maximum 5 Hz
b.
Input signal = maximum 20 HzThe curve gives the rms-value of accelera-tion at different frequencies
transverse
80 kg Third-octave band analysis,
directions. Drivers' weight =
a. X-direction b. Y-direction
The curve gives the rms-value of
accelera-tion at different frequencies
the frequency sensitivity Weighting factors relative to
range of maximum acceleration
(= 4 - 8 Hz in the case of aZ vibration, l - 2 Hz in the case of a or ay vibra-tion). ISO Standard 2631, 1978
Bilaga 1
Sid 3
Figure 7.ll Table of RMS broad-band value at different
Vibration conditions