»zu-- 4 4 1:54» y" z.
Nr 159 ° 1978
'
Statens väg- och trafikinstitut (VI'I) - Fack - 581 01 Linköping
ISSN 0347-6030
National Road & Traffic Research Institute - Fack - S-58101 Linköping - Sweden
Grundprinciper samt teknisk
159
beskrivning av slirvarnarprototyp
4.1
4.2
4.3
4.4
4.4.1
4.4.2
4.5
INNEHÅLLSFÖRTECKNING REFERAT ABSTRACT SAMMANFATTNING SUMMARY BAKGRUND SLIRVARNARENS GRUNDPRINCIPERBegreppen spin och friktionstal
Varningskriterium
Analys av funktionen
SAMMANFATTNING AV FÖRPROV
Experimentutrustning av funktion
Redovisning av praktiskt genomförda mätningar Slutsatser av praktiska mätningar
KONSTRUKTION AV SLIRVARNARPROTOTYP
Allmänt
Beskrivning av konstruktionsunderlag Principiell uppbyggnad Teknisk realisering GivareElektronik
Kostnadskalkyl
REFERENSER BILAGA 1 BILAGA 2 VTI RAPPORT 159Sid
II III VI h U J + A H U1 (X )14
14
16
21
24
24
26
28
29
Grundprinciper samt teknisk beskrivning av slirvarnar-prototyp
av Göran Palmkvist
Statens väg- och trafikinstitut (VTI) Fack '
581 01 LINKÖPING
REFERAT
Rapporten behandlar grundläggande principer och teknisk realisering av ett halkvarningsinstrument baserat på
mätning av varvtalsskillnaden mellan drivna och
fri-rullande hjul på en bil i relation till den samtidigt
utnyttjade drivkraften från motorn.
II
Fundamental principles and technical description of a
car installed skidwarner
by Göran Palmkvist
The National Swedish Road and Traffic Research Institute Fack
581 01 LINKÖPING
ABSTRACT
The report deals with fundamental principles and
technical development of an instrument for skidwarning based on the measurement of the difference of the
number of revolutions between driving and free rolling
wheels of a car in relation to the simultaneously
utilized driving torque of the motor.
III
Grundprinciper samt teknisk beskrivning av slirvarnar-prototyp
av Göran Palmkvist
Statens väg- och trafikinstitut (VTI) Fack
581 01 LINKÖPING
SAMMANFATTNING
I det svenska patentet 337332 beskrivs ett av ingenjör
H Ceder uppfunnet körsäkerhetsinstrument baserat på
mätning av varvtalsskillnaden mellan drivna och
fri-rullande hjul på en bil i relation till den samtidigt
utnyttjade drivkraften från motorn. Uppfinningen
känne-tecknas av att om en viss varvtalsskillnad uppnås vid
för låg drivkraft ges en varningssignal med innebörden
att tillgänglig friktion är i det närmaste utnyttjad
för fordonets framdrivning. Risk för sladd på grund av
nedsatt styrförmåga hos drivhjulen föreligger under
dessa omständigheter.
På uppdrag av ingenjör H Ceder och med ekonomiskt stöd från Försäkringsbranschens trafiksäkerhetskommittê (TRK) har vid statens väg- och trafikinstitut (VTI) konstru-erats en slirvarnarprototyp baserad på de resultat som erhållits i en tidigare utförd undersökning finansierad
av Styrelsen för teknisk utveckling (STU).
Målsättningen med prototyptillverkningen har varit att konstruktionen skall tillverkas i ett antal
exem-plar för användning dels vid fortsatt teknisk
utprov-ning och dels vid föreslagna beteendevetenskapliga undersökningar.
Vid den tidigare undersökningen framtogs på uppdrag av STU en experimentutrustning för praktisk provning av
patentidêns grundprinciper. Med denna utrustning
gjor-des en experimentell prövning av de tekniskt-fysikaliska
förutsättningarna. Vid proven uppmättes slirvarnarens
IV
styrsignaler som enligt patentidên utgörs av motorns drivmoment och genererat hjulspin. Proven genomfördes
på is- och asfaltunderlag med tre olika däckstyper.
Resultaten från dessa förprov visade att man även inom
det av tillgänglig friktion på is begränsade
drivkraft-området för en given drivkraft erhåller större spin
på is än på asfalt. Hitintills genomförda prov visar
att det är mättekniskt och fysikaliskt möjligt att
er-hålla varning när uttagen drivkraft uppnår 60 - 70% av
tillgänglig friktionskraft. Detta innebär också att
varningssignal erhålles endast om den vid tillfället
utnyttjade drivkraften uppnår ovanstående värden.
Den nu framtagna prototypen har konstruerats som ett instrument för uppmätning och presentation av absoluta
spin-nivån mellan ett drivande och ett icke drivande
hjul. Spin-nivån presenteras för bilföraren med hjälp
av ett visarinstrument. En ljudsignal träder i funktion
när en inställbar spin-nivå överstiges. Vilken typ av
presentationsmetodik som är lämpligast får utredas vid fortsatta beteendevetenskapliga studier.
För avkänning av hjulens rotationshastighet monteras en tandad metallskiva mellan hjul och hjulaxel. Skivan passerar en induktiv beröringsfri givare på ett
av-stånd av några mm.
Enligt förproven krävs registrering av små spindiffe-renser vilket innebär höga krav vad gäller apparaturens
upplösning och stabilitet. Vid konstruktionen har valts
en digital realisering enligt principer som utprovats under förproven. Utrustningen har endast provkörts ca 25 mil för teknisk funktionsutprovning. Vid fortsatt utprovning och bedömning av systemets värde ur trafik-säkerhetssynpunkt framkommer sannolikt synpunkter som kräver modifieringar och kompletteringar av utrust-ningen. Detta gäller främst val av optimal filtrering,
presentationsmetodik samt eventuell vidareutveckling av momentgivarsidan. Konstruktionen är så långt möj-ligt förberedd för dessa modifieringar.
VI
Fundamental principles and technical description of a
car installed skidwarner
by Göran Palmkvist
The National Swedish and Traffic Research Institute Fack
581 01 LINKÖPING
SUMMARY
The Swedish patent 337332 held by Mr H Ceder describes a skid warning instrument based on the measurement of the difference in the number of revolutions between driving and free rolling wheels of a car in relation to the simultaneously utilized drivingixnxpkaof the motor. The Characteristics of the invention are that if a certain difference in revolutions is reached a warning signal is generated meaning that available
friction for driving the car is almost utilized. The required difference increases with the driving torque. Under these circumstances there is a danger of skidding because of reduced steering capacity of the driving
wheels.
At the request of Mr H Ceder and with financial support from The Road Safety Committee of the Swedish Insurance
Industry (TRK) a skid-warner has been develOped at
the Swedish Road and Traffic Research Institute (VTI) based on the above mentioned patent and the results obtained in an experimental investigation
financed by the Swedish Board for Technical Development (STU).
In this initial investigation an experimental equipment was developed by means of which practical studies of
the fundamental principles of the patent were made. In these studies the input signals of the skid-warner were measured. The input signals were the driving torque
VII
of the motor and the generated wheel spin. The tests were carried out on ice and asphalt pavement with three different types of tyres.
The results showed that for a certain applied driving force the spin value on ice is higher than on asphalt even well below the force limit set by the available
friction on ice. The tests conducted so far also show
that it is possible technically and physically to warn when utilized driving force attains 60 - 70% of
avail-able friction force. This means, however, that a warning signal is obtained only when a driving force is present. The developed prototype has been constructed as an
instrument for measurement and presentation of the spin value between a driving and a free rolling wheel. The spin value is<displayed in front of the driver by means of an indication instrument. A signal gives information when an adjustable spin level is exceeded. Further
behavioural studies will investigate the most suitable
method of presentation.
The rotational speed of the wheels is measured by means of a slotted metal disc mounted between wheel and wheel axle. The disc passes a non-contact inductive sensor at
a distance of a few millimetres.
The initial investigation pointed out the need for
indication of small spin differences which demands high resolution and stability of the instrument. A digital solution is used, the principles of which were tested
during the initial tests. The function of the equipment
has been tested technically without problems though only for about 250 km. Further testing of the system from
traffic safety benefit point of view willprobably result in modifications and completions of the equipment. These would mainly be the choice of optimal smoothing,
presen-tation method and eventuelly a further development of the engine torque sensor. The device is as far as possible prepared for these modifications.
BAKGRUND
På uppdrag av Styrelsen för teknisk utvedkling (STU)
har vid statens väg- och trafikinstitut (VTI) genom-förts en teoretisk analys och experimentell prövning av tekniskt-fysikaliska förutsättningar för ett kör-säkerhetsinstrument enligt det svenska patentet 337332. Patentidên bygger på att hjulspin vid en viss uttagen
friktionskraft är olika stort på "halt" och "strävt"
underlag.
Resultaten från den här undersökningen visade att det är tekniskt och fysikaliskt möjligt att konstruera ett instrument som avger en varningssignal när 60 -70% av tillgänglig friktion utnyttjas.
För bedömning av systemets värde ur
trafiksäkerhets-synpunkt har VTI fått i uppdrag att tillverka en
slir-varnarprototyp baserad på de resultat som erhölls vid förproven. Målsättningen med prototyptillverkning har varit att konstruktionen skall tillverkas i ett antal exemplar för användning vid fortsatt utprovning och föreslagna beteendevetenskapliga undersökningar. Försäkringsbranschens trafiksäkerhetskommitté har finansierat prototyptillverkningen.
SLIRVARNARENS GRUNDPRINCIPER Begreppen spin och friktionstal
Då friktionskrafter skall överföras från ett
luftgummi-hjul till en vägbana för drivning (bromsning) av ett motorfordon uppstår alltid i kraftriktningen en glid-ning i kontaktytan mellan hjulet och vägbanan. Vid kraftöverföring med ett rullande hjul tillkommer dess-utom en rörelse vilket skenbart uppfattas som en
glidning men som beror av en kontinuerlig upprepad töjning och sammandragning av slitbanan. Dessa båda rörelser sammanfattas under begreppen slip och spin vid bromsning respektive drivning då friktionskrafterna
verkar i hjulplanet.
Spin uttryckes som en relativ skillnad mellan hjulets
framföringshastighet och dess periferihastighet enligt
8 = spinvärde i 0
V = hjulets framföringshastighet
VD = hjulets periferihastighet
V
V
=
F 'FF
wF = vinkelhastighet för fritt rullande hjul
w
= vinkelhastighet för drivande hjul
Friktionstalet p definieras enligt
:9.
N
D friktionskraften
N normalkraften
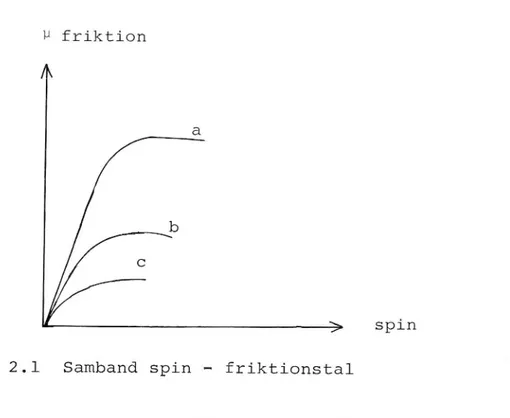
Mellan spin och friktionstal råder samband som
prin-cipiellt framgår av kurvorna i figur 2.1.
U friktion
Ä
>= spin
Fig 2.1
Samband spin H friktionstal
Kurvorna a, b, 0 kan för ett viss däck representera sambanden på varierande underlag (asfalt, snö, is). Vid ökad drivning ökar spinvärdet mot det s k optimala
värdet dvs det spin vid vilket maximal friktion
utnytt-jas. Om man vid detta spinvärde försöker ytterligare öka drivningen kommer hjulets varvtal att öka utan att drivmomentet ökar eller i dagligt tal "hjulet spinner loss".
Varningskriterium
Varningsanordningen enligt patentidéen baseras på den skillnad i genererat spin som föreligger vid en viss drivkraft på underlag med olika friktionsegenskaper.
Av fig 2.2 framgår att om vid en viss drivkraft (Mo)
ett spin (Sl) genereras på ett strävt referensunderlag
samt vid samma drivkraft ett spin (S
2)
på ett halare
l.
bär detta att varning ges först när 32-51 i ASo för eliminering av falska varningssignaler. Storleken på underlag skall varning ges om Sq> S Praktiskt
inne-ASo bestämmer systemets känslighet.
U friktion
A
>/</
/ Varning // AS
'â--t/ê_O / 7 - *Mo _
-/ l 1 -_ -n -0l
2
Fig 2.2 VarningskriteriumAnalys av funktionen
N
'ss
/
träv vägbana (referensunderlag) spinDet erfordras alltid en viss drivkraft för generering av det spin som skall ge information om vägunderlagets beskaffenhet. Den drivkraft som uttages vid fordonets framförande beror av färdmotståndet (FM) som är summan av rullningsmotstånd (FR . 0 'F1 ningsmotstand (_ST FM = FR + FL + FST + FA FR = m - g ° FR
_.
2.2
FL - (21 A 2 V FST = m ° g Sin v FA » m a _ 2 - 9.82 m/s9
V = hastighet m/s
5 = bruttovikt kg 0 = luftmotståndskoefficientp = luftens densitet = 1.226 kg/m3
A = front area m2 VTI RAPPORT 159 ) och accelerationsmotstånd (F), luftmotstånd (FL),
stig-A)°v stigningsvinkel . 2
a
acceleration m/s
Typiska medelvärden för personbilar är
m 3 1 200 kg 01 3 0.44 2 A 2 1.9 m
FR 3 0.013 + 8 - lO_5 ' V (för slät asfalt)
När den erforderliga drivkraften (FM) genererar en spin-differens ZASo relativt det sträva
referensunder-laget erhålles en varningssignal. Vid de hitintills
gjorda förproven har det visat sig möjligt att få
var-ning vid 60-70% av tillgänglig friktionskraft. En
grov uppskattning av friktionsnivån UM vid varning
kan tecknas
F
MV
3 (0.6 - 0.7) °
M
°
FW
B
Man kan inte alltid förhindra att FM kortvarigt blir
större än F
MVeller att hjulen kortvarigt spinner loss
trots varning vid inställd nivå. Detta beror på att
man inte hinner kompensera (minska gaspådraget) densnabba (< 0.1 S) ökning av spinnet som uppstår vid en
hastig drivkraftsökning och/eller
friktionsnivåsänk-ning.
SAMMANFATTNING AV FÖRPROV
Experimentutrustning och funktion
Ändamålet med förproven var en experimentell undersök-ning av förutsättundersök-ningarna för en praktiskt fungerande slirvarnare enligt patentidêen. En utrustning iord-ningställdes sxnn registrerade styrsignalerna samt enligt en viss logik avgav en varningssignal. I fig 3.l visas ett blockschema över utrustningen där
tionen förtydligas enligt nedanstående.
Indikering av motorns drivmoment (M) (3 summan av drivande hjulens drivkrafts- och accelerationsmo-menü realiserades genom registrering av motorns rörelse i dess elastiska upphängning. M h a en
linjär potentiometer omvandlades rörelsen till en
elektrisk signal. Kmf - M (se fig 3.1)
För registrering av den hastighetsskillnad som genereras mellan ett icke drivande och drivande hjul utnyttjades en befintlig p-dator för spin-beräkningen.
Registrerat spin 5' = w2-wl
i
' = registrerat spin
w2 = rotationshastighetsdrivande hjul (1 st)
1 = rotationshastighets icke drivande hjul (1 st) Det digitala spinvärdet (s') omvandlades till en
analog signal U'S.
U 5 = KSS (se fig 3.1)
Vid körning på ett "strävt" underlag (ASo inställes
till noll) injusterades Km så att U's' = Um
KSS' Ks
U'
3:U r Km=-_- = _-
mdär M 3 KAS' på det sträva underlaget (linjära
om-rådet). På ett halare underlag gäller att
M 3 KA -KV(S)- S' O<KV(S)<l där KV(S) är en funktion av spinvärdet. Um = U'
_KV' (3)
Då gäller att
8
VTI RAPPORT 159120 puls/varv
Logik u-dator Intel 8080 \/ Spin binärt 0rd XXXXXXLysdiod disPlay
D/A omvand-lare Filter 3-0rd Butterworth 7/3 Hz U1:K S'
s
s
Vänster wframhjul
_er
fl
; 10
' faceInter_
Ll
Vänster N
bakhjul ._I1____Ij__ é 10 Inter- 2
face motorrörelse Linjär potentiometer Mätförstär-kare+fi1ter 3-0rd Butterworth 7/3 Hz °M Kmf /' Inställning av Km U :K K f-M när M>O m m m )_-- U Um=0 när M<O m :> + U \ s jusstråleskri- J*
are sex kana-er + tidsmar-
<
- UO-Frullningsradiekomp.;få
Inställning av A80
erlng
.XLogisk signal
; "1" UmSUs Ev. hastighetsberoende
"0" U .
\;
J\ __
m
5
Hastighet vänster framhjul
dr__
Loâlsk
----§ZS
Min tid för villkoret U «U
varnings-
m- 3
Slgnal ----ç2ç Min tid för summersignal
NLVarningssignal
\\./Fi
3.1
VTI RAPPORT 159 SummerBlockschema mätsystem
\rTeoretiskt skall varning ges när KV(S)<l som
be-tyder att fordonet befinner sig på ett underlag
med lägre friktion än det sträva referensunderlaget där Km injusterats. Km är en funktion av däckstyp, hjulbelastning och hjulradie.
För varning erfordras att UmiUs (se fig 3.1)
vilket kan tecknas som
-KSASO + KSS' ZUm(=KVKSS')
Vilket innebär varning när spinnet (s') är
S' : ASo
l-KV(S)
Redovisning av genomförda mätningar
De mätsignaler som utgör styrsignaler till
slirvar-naren samt erhållna varningssignaler (se fig 3.1)
har registrerats vid körning på strävt underlag (as-falt) respektive isunderlag. Ur registreringarna har framtagits samhörande värden på uppmätt spin och driv-kraftsmoment (motorrörelse). En sammanställning har gjorts i fig 3.2.
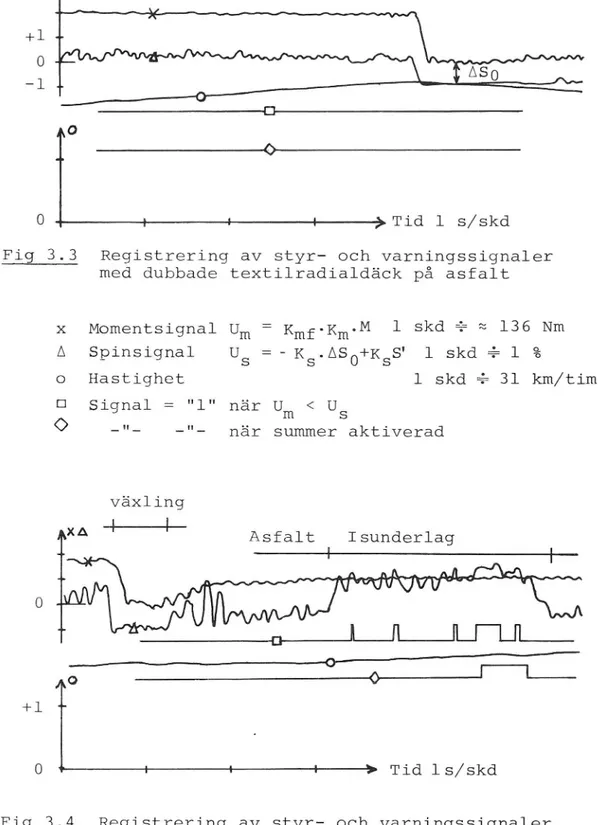
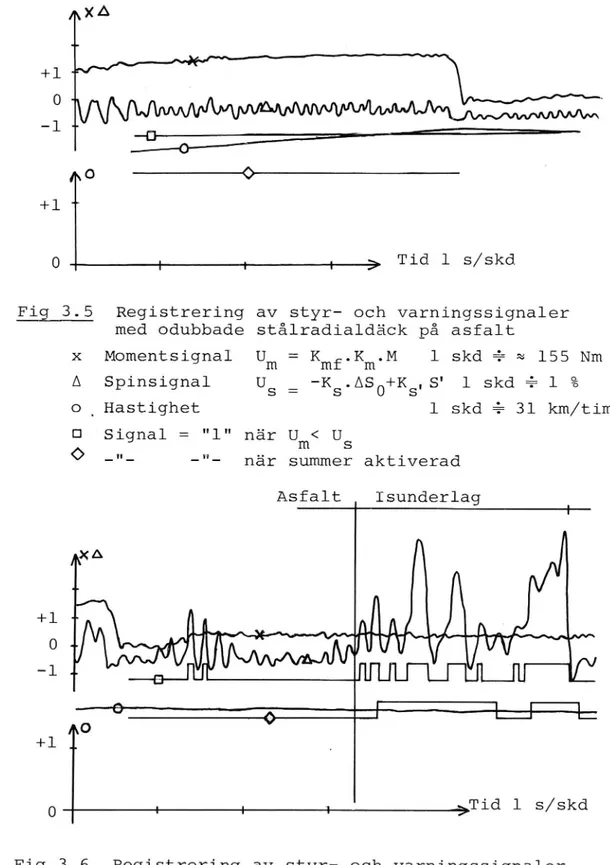
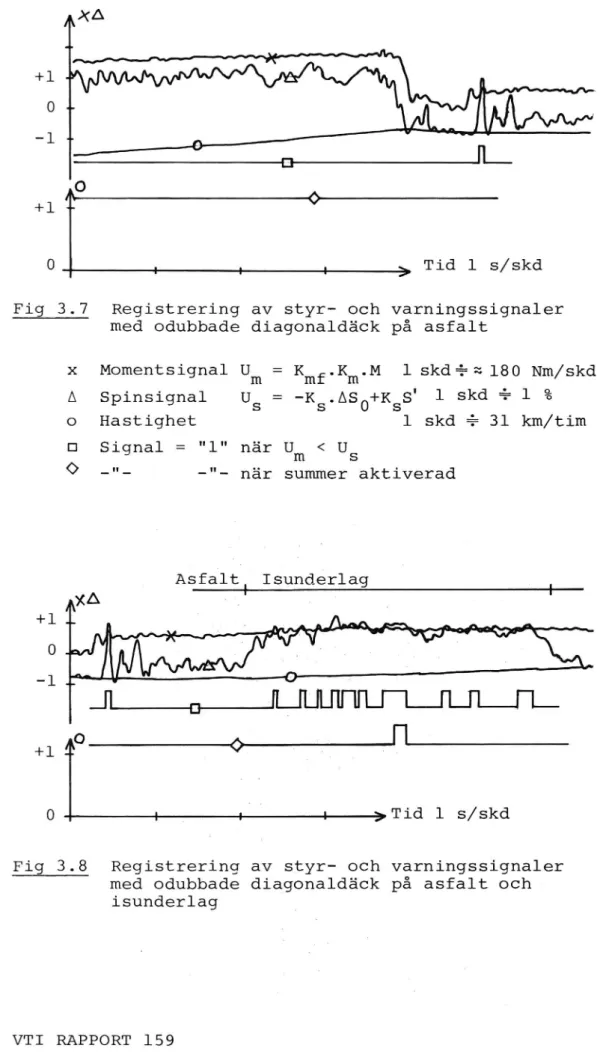
I fig 3.3 - 3.8 visas exempel på typiska
skrivar-registreringar vid körning på asfalt respektive
is-underlag med olika däckstyper. Under proven har ASo
och Km hållits konstanta där Km injusterats för
dia-gonaldäcket under körning på asfaltunderlag.
Drivmoment (M) I (Motorrörelse) _/ Nm A I. ..
o
I
/
"
/
A
0
A
277/
0. A
I
T
5)
A
T
Y'
0
I
få; A
2
A
A
0
A
A
A
A
AA
A
A
A
'
A
I AA A DE'
136 -
I'
D
D
Ål.. I. AA 73/13 Y 0 'vA
W
i??
O
8
.
I
'5
o
00
.
/
/
/
Spin (s')
0
/ .
5
> %
0 l 2 3C/OOdubbade stålradial Asfalt/Is
Å/A Dubbade textilradial
I/U
-"-
diagonal
1
Max uppmätt drivmoment när hjulet spinner
loss på isunderlaget
Fig 3.2
mätt spin och registrerat drivmoment
rörelse)
Sammanställning av samhörande värden på
upp-
(motor-vid körning på asfalt resp
isunder-lag. Radialdäcksregistreringarna genomfördes
på ett tjockt islager (glansis).
Diagonal-däcksregistreringen avser en annan typ av is-underlaglO
XA +1._i
A80
*fy*
/do/
fx
A0
443
O
:
44
%
å Tid l s/skd
Fig 3.3 Registrering av styr- och varningssignaler
med dubbade textilradialdäck på asfalt
x
Momentsignal Um = Kmf-Km-M
l Skd % 3 136 Nm
A
Spinsignal
Us =-KS.ASO+KSS'
l skd % l %
o
Hastighet
l skd % 31 km/tim
D
Signal = "1" när Um < US
<>
-"-
-"-
när summer aktiverad
växlingXA-4_J-
Asfalt IsunderlagI I
'
|
. .'Avan'l' "AOL0 ^
m
___
._i,
s-< -e
A_;;F'___
0 vi +1 0 r : : : > Tid ls/skdFig 3.4
Registrering av styr- och varningssignaler
med dubbade textilradialdäck på asfalt och
isunderlag
ll
0
:
i
;
> Tid 1 s/skd
Fig 3.5 Registrering av styr- och varningssignaler
med odubbade stålradialdäck på asfalt
MomentSignal Um = Kmf.K .M 1 skd ? s 155 Nm x m A SpinSignal US = -KS.ASO+KS.S l skd ? l 6
o. Hastighet
l skd % 31 km/tim
D Signal = "1" när U < Um 5 C> -"- -"- när summer aktiveradAsfalt
Isunderlag
.
i
+l 0 . -l i A _l 43 40 T0 +l _ O ' . +>Tid l s/skdFig 3.6
Registrering av styr- och varningssignaler
med odubbade stålradialdäck på asfalt och
isunderlag
12
.9
se
+1 +
V*
0
:
§
4
4%; Tid 1 s/skd
Fig 3.7 Registrering av styr- och varningssignalermed odubbade diagonaldäck på asfalt
x
Moment51gnal Um = Kmf.Km.M
15§Q1?23180 Nm/skd
A
Spinsignal
Us = -KS.ASO+KSS' 1 Skd % l %
o
Hastighet
l skd % 31 km/tim
D
Signal = "1" när U
m
< U
5
oi
-"-
-"- när summer aktiverad
Asfaltl Isunderlag
J
XA '_r i l+l
.
.A ..
c.
.
-' .'Yw »'4
-O -
_ .
-
_
.
*
-1 T' 1 A »-*{>" A " *i v O lg, __rl +1 V. .O .
:
I
>Tid l s/skd
Fig 3.8
Registrering av styr- och varningssignaler
med odubbade diagonaldäck på asfalt och
isunderlag
13
Slutsatser av praktiska mätningar
De genomförda mätningarna exemplifierar slirvarnarens
funktion på asfalt/isunderlag. Storleken på den
erfor-derliga drivkraften för varningsindikering på ett visst
"halt" underlag är naturligtvis beroende av sambandet
friktionstal/spin på de drivande däcken. Mätningarna
med det odubbade respektive dubbade radialdäcket på det
tjocka isunderlaget illustrerar detta förhållande. I
fråga om dubbdäcken erfordrades i exemplet en drivkraft
som överstiger den "normalt" uttagna för den använda
bilen vid konstant hastighet 70-80 km/h på någorlunda
plan väg. Vid de hitintills gjorda proven har det varit
fysikaliskt och mättekniskt möjligt att erhålla
var-ning vid 60-70% av tillgänglig friktionskraft.
Under samtliga körningar där varningssignal genererades, och samtidigt den uttagna drivkraften inte översteg
maximal tillgänglig friktionskraft, erhölls informa-tion om den lägre frikinforma-tionen (relativt
referensunder-laget) som vid dito körsätt normalt inte skulle
upp-märksammats.
Om man betraktar de resultat som framkommit vad gäller
de använda radialdäcken där spin-värdet <l.5% vid
"nor-mal" körning på asfalt underlag, kan en fixerad
spin-nivå l-l.5% ansättas för varning. Även på strävt
under-lag vid kraftiga accelerationer kan varningssignal av-ges men förväxling med halt underlag torde då vara utesluten.
Förslagsvis konstrueras också en spin-nivåmätare som
på lämpligt sätt indikerar spinvärdet för bilföraren.
Förhoppningsvis kommer bilföraren efter en tids
an-vändning att få känsla för vilka spin-nivåer som
före-ligger vid körning på ett "icke halt" underlag.
l4
KONSTRUKTION AV SLIRVARNARPROTOTYP
Allmänt
Målsättningen med prototyptillverkningen har varit att
konstruktionen skall tillverkas i ett antal exemplar
för användning vid fortsatt utprovning och föreslagna
beteendevetenskapliga undersökningar.
Arbetet innefattar utveckling och teknisk
funktions-utprovning av en slirvarnare som inmonterats i en av
VTI:s experimentbilar typ Volvo 142, automatic.
Prototypen har konstruerats som ett instrument för
uppmätning och presentation av absoluta spin-nivån
mellan ett drivande och icke drivande hjul. Spin-nivån
presenteras för bilföraren med hjälp av ett
visar-instrument. En ljudsignal träder i funktion när en
inställbar spin-nivå överstiges. Vilken typ av
presen-tationsmetodik som är lämpligast får utredas vid
fort-satta beteendevetenskapliga studier.
För avkänning av hjulens rotationshastighet monteras en tandad metallskiva mellan hjul och hjulaxel. En induktiv beröringsfri givare fastmonteras i lämplig stabil fästpunkt så att givaren passeras av den
tan-dade skivan på ett avstånd av några mm.
Som redovisats tidigare vad gäller slirvarnarens
grundprinciper erfordras alltid en viss drivkraft för
generering av det Spin som skall ge information om
vägunderlagets beskaffenhet. Förproven Visade också
att det erfordras registrering av små Spin-differenser
vilket kräver att spin-nivån beräknas med hög
preci-sion. Detta innebär att den metodik och utrustning som
användes vid beräkningen
inte får utgöra en
15
ning vad avser upplösning och stabilitet i jämförelse
med övriga felkällor i rotationshastigheterna pga
hjulpulsgivare, lastvariationer etc.
En digital realisering uppfyller upplösnings- och
stabilitetskraven. För reducering av övriga icke
önsk-värda variationer till acceptabel nivå filtreras
spin-nivåsignalen på analog väg.
Utrustning har endast provkörts ca 25 mil för teknisk
funktionsutprovning. Vid fortsatt utprovning och
be-dömning av systemets värde ur trafiksäkerhetssynpunkt
framkommer sannolikt synpunkter som kräver
modifie-ringar och komplettemodifie-ringar i utrustningen. Detta gäller
främst val av Optimal filtrering, presentationsmetodik
samt eventuell vidareutveckling av momentgivarsidan.
Tillverkas den här prototypen enligt målsättning i
ett antal exemplar med nuvarande utformning (vissa
modifieringar) är konstruktionen så långt möjligt
för-beredd för dessa modifieringar och kompletteringar.
4. 2
16
Beskrivning av konstruktionsunderlag
Om spin-värdet tecknas enligt sambandet
w
S = K'GE- ' 1 F
S = spin-värde
wF = vinkelhastighet för fritt rullande hjul
wD = -"- för drivande hjul
,
w
K=(§§ c_0
D U_
gäller att (S)
Genereras P pulser/hjulvarv kan vinkelhastigheterna
kan beräknas enligt följande metodik.
tecknas enligt:
w=2l
D PTD
wzzn
F PTFT = tiden mellan två hjulpulser
W PSt/Varv
T . F
S = K 5- ' 1
D
Tiden (T) kan tecknas som N-At N = O.l.2... At = tidbas N N SzK'N_F-'l= S'+N_F(K'-l) D D VTI RAPPORT 159
17
I intressant mätområde 5 < 0.05 kan (S) ansättas till
|
szs'+(-§)
-(K'-1)=s'+_K_i:_,l_
Termen KLl beräknas när S=0 dvs båda hjulen
frirullan-K
de. Då gäller att
NF>ND=> _Ta-<0
K-l 0
> =>_->
ND/NF
K
/
Termen (83 beräknas enligt följande
1' NF> ND:
S'ZKAS
=>NF>ND + KASO ND
K = 0.1.2.3... i. KMAX
AS e Vald upplösning. Ansättes till 2_n
n = heltal
När K = i+l uppfyller villkoret
N
F
< ND+ (i+l)AS
N
D
ansättes (83 till
5' = iAS
2'
NF < ND
(-s') 2 KAS
=>ND z NF + KASO ND
När K = i+l uppfyller
Villkoret
18
N < N + (1+l) AS N ansättes (83 till
Ovanstående kan illustreras
med flödesschemat i fig
4.1.
19
{\ \ Start :> Läs IN ND' NF Nej > NF ND JaL = NF
L
ND
al: max-pos ä
M = ND M = NF a2= max neg s. v 1 I R = ø R = 1K x-al
å\KMAX=a2
I _ -n AN e 2 ND K = ø M = M +AN L < M Ne] K = K+l Ja Nej S.: _K 2-n Jas'=K-2'n
, + K - 1 + ___r_K
2
S=S+--9-'15-1
Fig 4.1
VTI RAPPORT 15920
I nuvarande konstruktion gäller följande.
At = ZuS
P = 36 pulser/varv
_8N
AS
= 2
N 0,00391
Vid hastigheten 30 m/s erhålles då (hjulomkrets z 2 m)
1
2-10'
= 926 tidpulser mellan två hjul-
pulser.2
V 36
6
Minimihastigheten ges av max antal bitar i
tidbasräk-narna. I vårt fall 15 bit plus overflow.
1 _6< 215 â> VMin > 0.85 m/s.
2
VMin 36 2010
Den valda upplösningen (ASO = 0.391 %) vid
digitali-seringen har vid hittintills genomförda praktiska prov
visat sig godtagbar. Det bör påpekas att
fluktuatio-nerna i spin-värdet är större än ASO. Endast genom "kraftig" filtrering erhålles en signal som ger ett
medelvärde av det genererade spin-värdet.
Vid val av filtreringsgrad måste beaktas både
"låg-frekventa" och "hög"låg-frekventa" variationer. De
hög-frekventa variationerna alstras delvis pga
hjulpuls-givarnas onoggrannhet. I samband med växling, ojämn'
körning etc alstras också mera lågfrekventa
variatio-ner somamåste filtreras bort för att reducera antalet falska'varningssignaler.
Filtreringen inför en fördröjning i systemet vilket
betyder att "isfläcken" (= inställd varningsnivå)
måste ha en viss utsträckning innan varningssignal erhålles. Nuvarande gränsfrekvens 7 Hz (3-ord filter) ger tidskonstanten x 40 ms. Detta har kombinerats med
21
en konstant tidsfördröjning x 0.1 s.
Tidsfördröjningarna får en ogynnsam inverkan vid höga
hastigheter. Istället föreslås
en kombination av
ovanstående filter och en fix distansmätning.
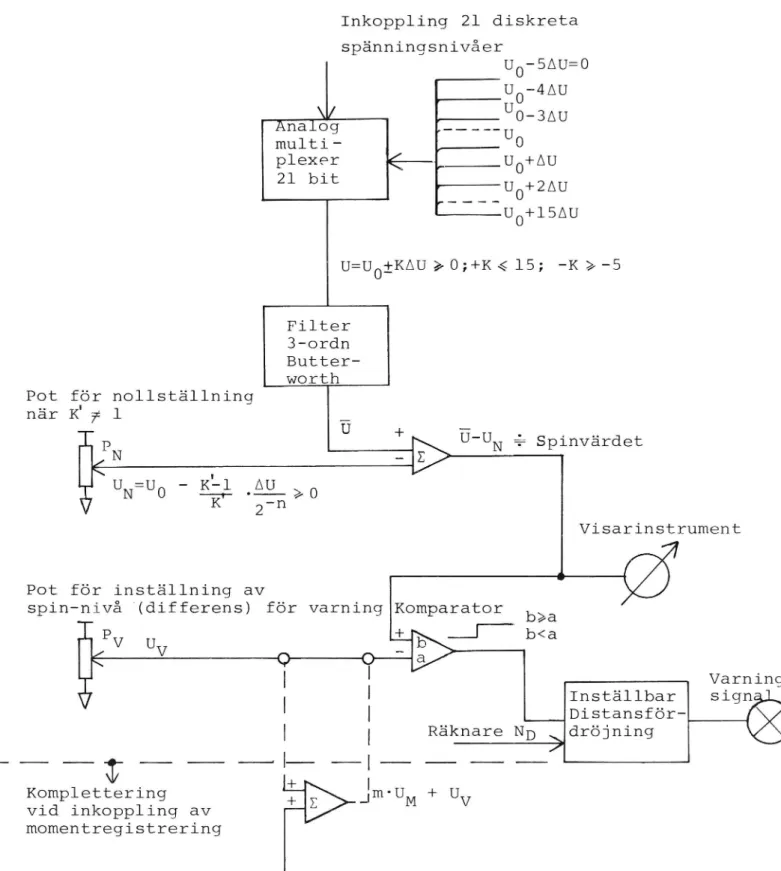
Principiell uppbyggnad
Konstruktionen har realiserats enligt det principiella
schemat i fig 4.2 och 4.3. Schemat består
huvudsakli-gen av en digital del (fig 4.2) samt en analog del (fig 4.3). I den digitala delen beräknas det positiva
eller negativa spin-värdet (S') med vald upplösning
(AS). Här erfordras att tidbasen är konstant.
Even-tuell långtidsdrift spelar ingen roll.
Det beräknade spin-värdet (SW i form av ett binärt ord
(K) omvandlas till en analog spänning (U) där AEIå=AS
AU kan nu väljas av sådan storlek att eventuell drift etc i analoga delen blir försumbar.
För nollställning (K'# 1) samt inställning av
varnings-nivåer finnes två pot. P
Nresp P
V'Vid eventuell
komp-letterande momentregistrering utnyttjas Pot. PM för
inställning av varningslinjens lutning samt PV svarar
för differensen till denna linje enligt principer som
redovisats vid förproven.
22
Hjulpulsgivare
drivande hjul Hjulpulsgivarefrirullande hjul
O
Signal-
Signal-.
JLLLLLU.
.
anpassnlng
Tidbas
anpassnlng
_I_'L_I_L_
_WL_
Synkroni- Synkroni-. . addnin Laddninq , _ serlngsloglk ser1ngslogü<
Tidbas Nellställning Nollställning Tidbas lG-bitars lö-bitars
binärräknanâ
binärräknaxa
l6-bitar8
lö-bitars
3-state 3-state buffert- buffert-register register[
ND
NF
J
Läs in ND \ Läs in NF N u-dator ND klar för inläsninq F klar för inläsninq Bromsljus ZF K 4 bit binärt ord + teckenbit
Logik
Till analog multiplexer
12 v
DC/
DC-omv
5 v \
T7
VTI RAPPORT 159
23
Ink0ppling 21 diskreta
spänningsnivåer
UO-SAU=O U -4AU r______U0 , F_____ O-3AU Analog , _ _ _ __Imulti-
k_____L0
Sigge:
'<á-wr___UO+AU
l r_____UO+2AUr____U +15AU
O U=UOiKAU > O;+K \< 15; -K >/ -5 Filter 3-ordn Butter-worthPot för nollställning
när K'; 1
_
U
+
U_U
?. S .
pinvar en d t
PN
_ >
N
IN_UO _ 5:; -AU > 0
K Z-n Visarinstrument Pot för inställning avspin-nivå (differens) för varning Komparator
_bzaPV U b<a
V
ixf_
,L
.
|
Varningsn
l Inställbar signDistansför-[
Räknare ND
dröjning
__ __ __ 3
i g
.
+
Komplettering + M V vid inkOppling av momentregistrering Pot för inställning avMomentgivare MéeDrivmoment varningslinjens lutning (m) UM = f(M) M>O PM
Max U "3 u ' n "
U : 0 M<O M lSAU [Ä Mjukare dack
M
l
l
i
Fig 4.3
:'
O
"Styvare" däck
.4
.4. l
24
Teknisk realisering
Givare
Givarsidan (hjulpulsdon, ev momentgivare) kräver viss
anpassning för varje typ av hjulkonstruktion
(motor-infästning).
Elektroniken i övrigt kan göras generell om den
inne-håller justeringsmöjligheter enligt fig 4.3.
Givarelementen är av induktiv typ (se datablad bil 1)
helt inkapslade vilket gör dem användbara i den här
miljön. Avståndet till den tandade metallskivan kan
vara några millimeter vilket erfordras pga vibrationer
etc. Utsignalen från givaren är oberoende av
hjulhas-tigheten.
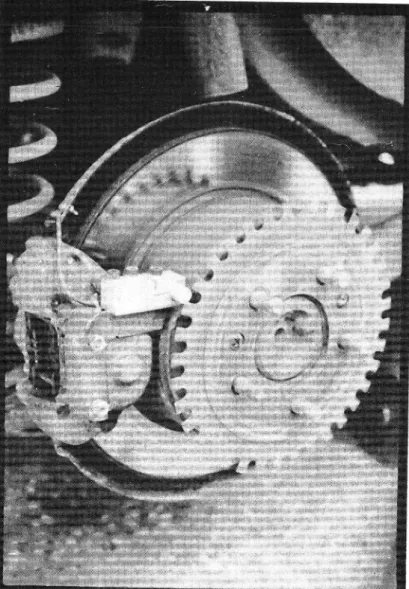
För fastsättning av tandskivan bortmonteras hjulet. I
tandskivan har borrats motsvarande hål för hjulbultar-na. Skivan monteras sedan mellan hjul och hjulaxel. Största problemet ligger i givarens
fastsättnings-punkt som måste vara stabil.
Konstruktionen har inmonterats i 3 av VTI:s experiment-bilar (2 Saab, 1 Volvo) se fig 4.4 och fungerat utan anmärkning. Då konstruktionen kräver en viss
anpass-ning till varje biltyp blir enstaka exemplar relativt
dyrbara att tillverka.
25
Fig 4.4
Hjulpulsgivare
26
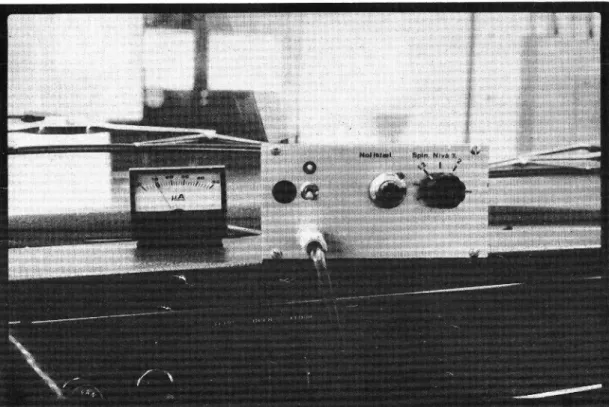
Elâttäeriit
Elektroniken se fig 4.5 har konstruerats enligt kopp-lingsschemat i bilaga 1, vilket är en realisering av
prinicipschemat i fig 4.2 och 4.3. För beräkning av
(S') användes en enkapseldator typ INTEL 8748. Dess
minneskapacitet och snabbhet är fullt tillräcklig för
den här tillämpningen.
Datorn har två 8-bitars In-portar som användes vid
F, ND samt en 8-bitars (register)
ut-port som användes för utläsning av (SW.
inläsning av NIn-portarna betecknas P10 - P17, P20 - P27 samt
ut-portarna BO - B7. Datorn har 3 senselines Tø, Tl, och
INT som utnyttjas för avkänning av yttre tillstånd.
Den i fig 4.2 angivna synkroniseringslogiken arbetar enligt följande.
IWF-L
_IF-LJ
CLK l MHz
J *1 HPNF, HPNDI
|
Stop/Load
J L Reset Tø, Tli
J
B7' 86
Tø, Tl anger när NF resp ND är klara för inläsning. B7, B6 anger att register NF resp ND förbindes med
P10
P17' P20 ' P27'
27
, .A v. Mvw-U^ - *m W W t 8* 19 . i . e 2 g' áâi o ' øøa a t» o . o< a vn ' xy, ' r xu' xüo 'o o-.o x A 9; * oo o o u-xxx xa x-: o n p a o 9Fig 4.5 Elektronik
VTI RAPPORT l 5 928
INT indikerar broms till/från.
Bø--B3 anger spinvärdet (SU
samt B5 tecknet.
___ n Il :°: :HJ-11:2: _.
135
0
. +, 135
Programmet har realiserats enligt flödesschemat och
instruktionslistan (l78 instruktioner) 1 Bilaga 2.
Utrustningen kan beräkna och presentera spinvärden (S)
i området ø-5%. Nolljusteringen kan göras för
0.98 < K < 1.02.
När inställd varningsnivå uppnås aktiveras en summer. Kostnadskalkyl
Kalkylen baseras på tillverkning av 5 st exemplar.
l. Materialkostnad/enhet 1 300 kr
2. Arbetskostnad för tillverkning samt kalibrering/ enhet 4 000 kr
3. Kostnad för inmontering av hjulpulsgivare beror av om utrustningen inmonteras i olika biltyper Maximal kostnad 5 000 kr/enhet
29
REFERENSER
Utveckling av körsimulator. Delrapport; Matematisk fordonsmodell, av Staffan Nordmark. Statens väg-och trafikinstitut (1976).
Friktionen i vägsammanhang. Teorier och praktiska
frågor. Evert Ohlsson, Carl Formgren och Olle
Nordström. Internrapport 94. Statens väg- och trafikinstitut (1972).
Modell för beräkning av drivmedelsförbrukning, av Olle Odsell. Statens väg- och trafikinstitut
(1978).
Körsäkerhetsinstrument för bilar baserat på mätning av hjulspin. Teoretisk analys och experimentell prövning av tekniskt-fysikaliska förutsättningar, av Göran Palmkvist. Statens väg- och
trafik-institut (1978).
VTI RAPPORT 159 _.. .. go tl an d .. 1/ 31 70 00 , 6/ r a 1/3 17 00 0 5/ 01 '7 04 9 '7 7 2 NC 5 70 .'/q I' la a/ C F/ 50 ' Hc /4 /5 '0 8 H E F 40 5/ ml ). 2 ; Ra y_ /vo 6
um
QE:
.
q
[b åd ar -HE 'F V0 5/ 2/4 WO 2/4 ' 10 10 18 77 ! K E F 4/ 05 / Y 13 31 5. ? |3
!
____
_,
Ng
_
,
Va
n/
00
°
!
a ' MI : /7 .5 2" ,4/ (1 /I/ 5'1 1' i ; _ 'EZ -'r 1 Hur . ; 1 6, 1] i. -q 1/ 1 , '/ 0 14 /0 6? ,ut , 7 5 3 , /w/ ' Ne ). h) . fr '[5 wo 67 I ' 00 /K0pplingsschema
Slirvarnarprototyp D1g1
tal delBilaga 1 Sid 1 (3)
(3)
Bilaga 1 Sid 2Slirvarnarprototyp Analog del Kopplingsschema
...L
it_'
-7/7
7122
071.-.
.-.__.
_
áf
j*
*'
mu+
I .# 5m
J
m
"7
45.' '47 P k' q uo t s s åzJ / I uü/ l..,
L'"'
/ M H '7,' .9 80 ,4 1 p/l gl 'i i' W/ l " " 2 ?F l/ l 9 I " CA " .7 1/ [5 73 .1 '-3 : 5 7 ;3 oz / h \ .0. ' v ' Y »vwva mm r ' ...1. ;_.'11 0 / 41 3. 13 4 o z 5111 ,' 2)/I
i I I L e ; L P T 17/ 75) .'41
*
0
7
7
m4
L '7 ' 'A I '0 00 .9 d ^_§_ "_0 _. JOIT ÖF SJDA /mua wo u 140 6 V i _ _ _ _ ,12 s0 3/ 3.'08 _f_ :i h/ "' 1-« '0 -1; m / r _ -. / / -'31/ eg; .9 -0 gøj u-uj ogM
9
W
V0 / -S SU IU JD A lul lun 'g ltu]i
1
v w / V 7 A v! N 0 5 1/2/ 'l l/ MT _I W/ 1 'd 7 JU / ;j r/ LL .rv/ Zl_ :im /19 1_J/ K/ #3/ zt h U / ' l / i n/ / '0 _T __
N"
121
1/5 7! Iwc ca w/ f r .U G/ 'l
T
5 MN F/ 'N 77 '. .-h Zo SE DN /z 7 . 0 / / V I L, _, __ . _ m _ . . . _ g _ . . . ,vw a d <1 [' W"suwwp
nw
I,*
h
J
.1l 9 114 75' 1 :l-: 0 09:1 fea r
_
4L
!
'N d/ r' ' C a b j ld y/ ;Mi nh-1:1 dh ' 1 202 2:1 464 [ .-W, 095 M N M:1_
7
I
? 'zo n 7;; 4/, v0 9: [V MI .lf/ 7 Å-O ÃVl
i J1
p. \ \ -Y .4 VTI RAPPORT 1 59Bilaga 1
Sid 3 (3)
TEKNISK SPECIFIKATION FÖR PULSGIVARE NIK 5
Tillverkare TURCK KG Typ GK
ELEKTRONIK-FEINBAU Plaströr, 11 mm Q
Generalagent
ELFA
längd 30 mm lång
FunktionsdataOmslagsavstånd vid
tandskiva av stål Korrektionsfaktor vid tandskiva av A1 Cu V2A MsReproducerbarhet
vid konstant passagetid
Hysteres
Tillåten
omgivnings-temperatur
Tillåten avvikelse i
omslagsavstånd inom hela
temperaturområdet
ELEKTRISKA DATATillåten driftspänning
Tillåten ripple
Viloström dämpad initiatorOdämpad initiator
Belastningsmotstånd
Belastningsström
OmslagsfrekvensP01 förväxlingsskydd
Begränsning av brytspänning VTI RAPPORT 159 0 0 0 0 U W K O J Äb 0,01 mm < 0,5 mm-25 till +700c
max 1 10% 24 V = 1 15% max 10% ca 12 mA ca 20 mA 200 Ohm max 120 mA 2 kHz inbyggtBilaga 2
Sid 1 (8)
INT = ø Broms till
Pos spin-beräkning SUB ø (N SUB 1 (N ) 4. Tø = 1 N klar F Tl = 1 ND klar Neg spin-beräkning
T
Läs ut spinvärdet VTI RAPPORT 159 SUB 1 (N ) JaSUB ø (N )
.
NGj
START Adress
øøøø
ø2
ø3
ø5
ø7
ø9
øA
SUB ø:
0100
02
03
05
06
07
09
0A
0B
OC
OD
InstruktionMOVA,# 64
OUTL BUS,
MOV R MOV R OI llMOVA,# 128
OUTL BUS,
JMP ølZø
Inläsning av icke drivande hjul
Bilaga 2
Sid 2 (8)
Kommentar2340; A+64
02; b7, bsñä=ø,B6=l
B82ø; RO+32
B928; Rl+40
238ø; b6-ø = ø, b7=l
02; _II_242ø;
"N Il . FHastigheten lagras i R3, R2
overflow
R
+
R3
2
MSB LSB NFANL BUS, ;5% 127
IN A, P2JB7, ZøH
MOV R3' AINA, Pl
ORL BUS, # 128
MOV R2A, RET NOP NOP NOPVTI RAPPORT 159
987F; Läs ut ø-B för enable av Zatch NFøA; A+NFMSB
F 22ø; b7=l á overflow
AB* R3+ NFMSB
øg; A* NFLSB
888ø; Läs ut l-B7
AA; R2* NFLSB
83; Inläsning klar
00;
00;
00;
SUB 1:
OløE
10
11
13
14
15
16
17
19
1A
1B
1C
1D 1E 1F Hastigheten lagras i R Inläsning av drivande hjulMSB
41
MSBANL BUS, # 191
IN A, P2JB7, 2øh
MOV R5, A INC Rl MOV Ö, Rll A IN A, P1ORL BUS, #264
DEC Rl MOV R4, AMOV 6, R A
1 RET NOP NOP NOP VTI RAPPORT 159Bilaga 2
Sid 3 (8)
"N II D 5, R4 samt Ad. 41, 40R4
LSB ND40
F_ LSB Adress finnesi Rl
98BF; Läs ut ø+B för enable latch N DøA; A + NDMSB
FZQø; b7 = 1 â>overflow
AD; R5 + NDMSB
19; [R1] + 41
A1;M41
+ NDMSB
øg; A + NDLSB
884ø; Läs ut 1-B
6
C9; [R1] + 40
AC; R4 + NDLSB
+ NAl;
M40
DLSB
Inläsning klar "N "
83; D 00 0000
Bilaga 2
Sid 4 (8)
2A: 012ø
MOV A,á5192
23Cø; Läs ut 11000000
22 OUTL BUS A ø2;
23
CLR A
27; A + ø
24 MOV PSW, A D7; PSW + ø
25
JNI ø 125
8625; INT :lø :>broms till
27 JNTø ø 125 2625; Tø = 1 â>Nl ready29
CALL øløø
34øø; SUB ø Inläsning av NF
2B
CALL øløE
34øE; SUB 1
-"-
ND
"Beräkning av Villkoret NF2>ND"
2B:
2D
CLR C
97;
2E CPL C A7; CY + 1 ZF MOV A, R4 FC; A + NDLSB3ø
HJZ 35H
C635; Om NDLSB = ø + 35
32
CPL A
37;
NDLSB 2_kompl
33
ING A
17;
34
ADD A, R2
6A; NFLSB" NDLSB
35 eMOV A, R5 FD; A + NDMSB36
JZ ZøH
C62ø; R5
Normalt # ø
38
CPL A
37; NDMSB kompl
3A MOV R0, 35 B823; RO + 353C JNC 46H E646; CY=lâ>NF>ND; CY=øâ>NF<ND 3E MOV<5RO, 241 BøFl; MAX POS SPIN= 15°AS0
Lagras 1 M35,
241 = 2 kompl 15
4ø
MOV R7, 1
BFøl; R7 = 1 nar NF2>ND
42
NOP
øø;
43
NOP
øø;
VTI RAPPORT 159< Om NF N
hastighet«icke drivande,D
Bilaga 2
Sid 5 (8)
vilket indikerar att drivande hjuls
beräknas det neg spin-värdet.
0144
HJMP
245ø; Hepp ti11 rutin för
beräkning av spin.
46
MOV R7, ø
BFøø; R7 + ø Nar NF < ND
48 MOV(5RO, 251 BøFB; MAX NEG SPIN=5°AS lagras
i M
35
. 251 = 2 koml 5
4A MOV A, R2 FA; A + NFLSB 4B XCH A, R4 2C; A + NDLSB, R4 + NFLSB 4C MOV R2, A AA; R2 + NDLSB 4D MOV A, R3 FB? A + A1- NlMSB 4E XCH A, R5 2D; R5 + NFMSB;ZX+ NDMSB 4F MOV R3, A AB; R3 + NDMSBBeräkning av sgin.
015ø
MOV R0, 32
B82ø; [RO] + 32
52 CLR A 27; A + ø- MOV R6, A AE; R6 + ø (R6 = spinreg)
54
MOVÖRO,
Aø; M32 + ø
55
INC R0
18; RO + 33
56 MOV A, R4 FC; A + NDLSB (NFLSBCNHNF<ND) 57 MOVÃSRO, Aø; M33+ _"_ 58 INC R0 18; RO + 34 59 MOV A, R5 FD; A4-NDMSB (NFMSBCMHNF«ND)5A
MOVÖ RO, A
Aø; M34+
-"-3A:- 5B DEC RO C8;
5C
DEC RO
C8; RO + 32
Bilaga 2