http://www.diva-portal.org
Postprint
This is the accepted version of a paper presented at International Gas Turbine Congress
IGTC2019.
Citation for the original published paper:
Zaccaria, V., Rahman, M., Kyprianidis, K. (2019)
A review of information fusion methodsfor gas turbine diagnostics
In:
N.B. When citing this work, cite the original published paper.
Permanent link to this version:
A review of information fusion methods
for gas turbine diagnostics
Valentina Zaccaria*, Moksadur Rahman and Konstantinos Kyprianidis
Mälardalen University, Simulation and Optimization for Future Industrial Applications Västerås, Sweden
* Corresponding Author: valentina.zaccaria@mdh.se
ABSTRACT
The correct and early detection of incipient faults or severe deg-radation phenomena in gas turbine systems is essential for safe and cost-effective operations. A multitude of monitoring and diagnostic systems have been developed and tested in the last decades. The current computational capability of modern digital systems has been exploited for both accurate physics-based methods and artifi-cial intelligence or machine learning methods. However, progress is rather limited and none of the methods explored so far seems to be superior to others. One solution to enhance diagnostic systems exploiting the advantages of various techniques is to fuse the infor-mation coming from different tools, for example through statistical methods. Information fusion techniques such as Bayesian networks, fuzzy logic, or probabilistic neural networks can be used to imple-ment a decision support system.
This paper presents a comprehensive review of information and decision fusion methods applied to gas turbine diagnostics and the use of probabilistic reasoning to enhance diagnostic accuracy. The different solutions presented in the literature are compared and ma-jor challenges for practical implementation on an industrial gas tur-bine are discussed. Detecting and isolating faults in a system is a complex problem under many uncertainties including integrity of available information. The capability of different information fu-sion techniques to deal with uncertainty are also compared and dis-cussed. Based on the lessons learned, new perspectives for diagnos-tics and decision support system are proposed.
NOMENCLATURE
BBN Bayesian Belief Network DAG Direct Acyclic Graph DS Dempster-Schafer
DDSS Diagnostics and Decision Support System FBN Fuzzy Belief Network
FOD Foreign Object Damage GPA Gas Path Analysis HI Health Index NN Neural Network
PCA Principal Component Analysis PNN Probabilistic Neural Network SVM Support Vector Machine VGV Variable Guide Vane INTRODUCTION
Automated systems for degradation monitoring and fault diag-nostics are commonly used nowadays in gas turbine power plants. Over the decades, a myriad of methods and techniques have been proposed and developed to address the challenge of early detection of incipient faults or failures, and effective maintenance planning. The simplest tools are the ones performing anomaly detection;
when a measurement or a monitored parameter exceeds a prede-fined threshold or its trend differs from what expected, an anoma-lous condition is flagged. These systems do not give any indication on the problem source, but merely point out that something is not working as expected. They can be as simple as a threshold exceed-ance or employ artificial intelligence for pattern recognition [1-3]. Once an anomaly is detected, the wish of the service engineer (or the operator) is to isolate the anomalous component, identify the severity of the problem, and ultimately answer to the question: “Can the machine still operate in a safe condition, or which corrective action needs to be performed?” Numerous model-based solutions have been investigated until now, which include filters for states estimation [4], performance models coupled to various optimiza-tion algorithms [5-7], and machine learning models such as neural networks, support vector machine, etc. [8,9]. The common purpose of these techniques is to estimate non-measurable quantities, i.e. some performance deviation indices, from available measured data. Extensive reviews of currently used methods can be found in the literature, for example [10].
Parameters such as deviation in efficiency or flow capacity are often considered as health indicators; however, they are affected not only by thermodynamic “anomalies” (e.g. fouling, erosion, corro-sion) but also by other malfunctions or mechanical integrity (e.g. wrong VGV position, wrong valve position, FOD…). Diagnostic systems based on performance models and optimization tools usu-ally detect thermodynamic deviations without relating them to the occurred event. Classification of fault or malfunctions is often pro-vided through statistical methods or machine learning techniques. Classification algorithms suffer however one major drawback, i.e. the necessity of a large amount of historical data. Depending on the available data, certain faults may not be recognized or on the con-trary, perfectly healthy operations can be classified as faulty condi-tions if lying outside the training space. All methods have also var-ious degree of sensitivity to noise and model uncertainties [11,12]. Data pre-processing and correction is fundamental for any type of diagnostic system [13-15]. Because gas turbine performance is extremely sensitive to ambient conditions, measured data need to be corrected to isolate the effect from the one induced by a fault. Measurements can be manipulated to extract useful features (or in-formation) that can work as input of the diagnostic tool. Multiple methods have been proposed for data correction and features ex-traction, such as in [7,14,16].
In order to combine the benefits from different methods for data processing, anomaly detection, and fault identification, the ap-proach of information fusion was proposed. Various information coming from different sensors, models, or algorithms can be fused together to achieve the right answer to the question previously for-mulated. The concept of integrating and fusing multiple infor-mation aims at emulating the human reasoning, which is extremely
effective in drawing conclusions even in presence of uncertainty. An illustration of what is required in industry is provided by Zhang et al. [17], which presented the effort to integrate human experience, expert reasoning systems, and signal processing. The key is not to exclude the human but to leverage digital tools to include human experience and at the same time supervise the automated system, which learns from the experts.
In this paper, a review is given concerning the information fusion approach applied to diagnostics and prognostics in gas turbine sys-tems. Information fusion is often mentioned as a promising solution for enhanced diagnostic and decision support systems (DDSS) in numerous review articles [10,18]; however, a lack of a focused re-view and discussion of different methods and application is what this paper aims to address.
BACKGROUND
The concept of data and information fusion for gas turbine diag-nostics and decision support was already discussed in the 90’s, es-pecially given the increasing use of belief networks combined with thermodynamic models for diagnostics [19]. Bayesian Belief Net-works (or BBNs) started to be used to fuse the information coming from gas path analysis with other observations, including mainte-nance history, and capture the experience of the service engineer [20].
A first concept of data fusion for enhanced prognostics was pro-posed by Hansen et al. [21]; in their framework, sensors information were fused with models of faults evolution to predict the remaining life of the component. In the following years, Hall et al. suggested to include negative information in the fusion system to rule out pos-sible causes if one or more expected evidences did not occur [22]. This is actually possible through both probabilistic and fuzzy infer-ence. The promising opportunities opened by information fusion led Impact Technologies LLC to present a proof of concept for an integrated diagnostics and prognostics framework [23]. In their ar-ticle, Roemer and Kacprzynski theoretically discussed the imple-mentation of such framework based on the concepts of sensors data fusion and information fusion for failure prognostics. A Bayesian inference algorithm was recommended for fusing the diagnosis in-formation from two techniques, namely a collaborative probabilis-tic fault identification and neural-network pattern recognition, and from vibration analysis; finally, information from the diagnostics module and life remaining models were combined. The concept of multiple-sources information fusion with Bayesian networks is il-lustrated in Figure 1.
Fig. 1. Outline of a multi-source information fusion tool based on a Bayesian network
COMMON TOOLS AND METHODS
One of the most used method for information fusion, especially for sensor data, is the Kalman filter and its variants. As fundamental principle, the Kalman filter estimates some states in the system from the available measurements; this procedure includes two steps, prediction, as shown in Equations 1 and 2, and correction, Eq. 3-5.
𝑥̂𝑘= 𝐹𝑥𝑘−1+ 𝐵𝑢𝑘−1 (1)
𝑃𝑘= 𝐹 ∙ 𝑃𝑘−1∙ 𝐹𝑇+ 𝑄 (2)
𝜀𝑘= 𝑦𝑘− 𝐻𝑥̂𝑘 (3)
𝐾 = 𝑃𝑘∙ 𝐻𝑇(𝑅 + 𝐻 ∙ 𝑃𝑘∙ 𝐻𝑇)−1 (4)
𝑥𝑘= 𝑥̂𝑘+ 𝐾𝜀𝑘 (5)
In the above equations, x is the estimated state multiplied by a state-transition matrix F, B is the observation model applied to the control vector u, P is the covariance matrix, Q and R are the covar-iance matrices of process and observation noise respectively, and y is the measurement. Multiple solutions to modify the original algorithm for data fu-sion have been proposed, such as in [24]. For example, states esti-mated from multiple sensors can be fused by weighting matrices that are function of the covariance between measurements. In other problems, one sensor can provide the a priori information for the prediction algorithm. Due to the uncertain nature of the data and event observation, stochastic methods are preferred for the task of information fusion. The most common techniques include: Bayesian Belief Network (BBN), Dempster-Schafer (DS) theory, fuzzy logic inference, and Probabilistic Neural Network (PNN). These are briefly introduced in this section, with more space given to Bayesian networks. An overview of the methods and applications can be found in [25]. Bayesian networks represent a culmination of Bayesian theory of probability, which can be summarized as in Equation 6. The equation represents a casual statement of the kind X →Y, where X causes Y and Y takes the role of an observable effect of X. P(Y) is called the prior probability, while P(Y|X) is called the posterior probability. The factor that relates the two, P(X|Y)/P(X), is called the likelihood ratio. 𝑃(𝑌|𝑋) =𝑃(𝑋|𝑌) 𝑃(𝑋) 𝑃(𝑋) (6)
A BBN is a probabilistic graphical model that represents factor-ization of joint probability distribution [26]. It provides a compre-hensive way to handle uncertainty in mathematical computation, consequently widely used for representing uncertain knowledge. Bayesian probability differs from classical probability by the fact that classical probability does not put any weightage to the evidence while Bayesian probability always comprises of a certain degree of belief in the evidence [27]. The most beneficial aspect of a BBN is that it can be constructed with limited data set or even in the absence of data only by integrating expert knowledge [28,29]. A BBN model can also produce partial results with missing data, which can be beneficial in an industrial setup. As soon as a new evidence become available, the BBN can be inferred to update belief in specific out-come.
A BBN has two major parts: a qualitative or structural part, con-sisting of directed acyclic graph (DAG) and a quantitative part that is a set of conditional probability distributions. Typically, a DAG consists of finitely many nodes and edges, where each edge corre-sponds to a conditional dependency, and each node correcorre-sponds to a unique random variable. As the directed edges represent a static causal probabilistic dependence, cycles are not allowed in the graph. As a result, they are called acyclic graphs. The edges are irreversi-ble. It is important to note here that a node in a BBN is only de-pendent on its “parent” nodes. Therefore, BBNs have a local Mar-kov property.
Constructing a BBN involves building the structural part of the BBN or DAG and specifying the conditional probabilities also known as parameters. A BBN can be constructed completely man-ually from expert knowledge, completely automatically from data, or through a combination of a manual and automatic technique, where partial knowledge about the structure or the parameters are learnt from the data [26]. Over the years, many learning algorithms
such as search-and-score approach, constraint-based approach, bootstrap approach, K2 algorithm, three-phase dependency algo-rithm, etc. have been explored for structural learning of a BBN from historical data [30-32]. On the other hand, manual construction of a BBN structure is also possible, but can be very labour-intensive, requiring a great deal of skills as well as in-depth knowledge on the problem domain. Similar to DAG, parameters can also be estimated from historical data and expert knowledge. The most popular tech-niques for identifying parameters from data are maximum likeli-hood estimation and Bayesian estimation [33].
An example BBN structure for multi-source information fusion is depicted in Figure 2. Here, Xij node denotes the input information
collected from information source ‘i' about the fault type ‘j’ and Yj
node denotes the fused information about the fault type ‘j’.
Fig. 2. The Bayesian network structure for multi-source infor-mation fusion.
Bayesian networks have been extensively used for fault diagno-sis purpose in the gas turbine field [34-36]. These articles illustrate some of the principles to construct a BBN for fault detection, isola-tion, and classification in gas turbines.
As a generalization of Bayes theory, the Dempster-Schafer the-ory assigns different degrees of belief, called masses, to each subset of propositions that form a system (e.g. set A, set B, both, neither). Unlike the Bayes theory, the probability of an event is bounded be-tween a belief level and a plausibility level. Belief from different sources can be combined through DS rule, which calculates the re-sulting mass from Equation 7 and ignores conflicting evidences through a normalization factor, as Equation 8 shows.
(𝑚1⊗ 𝑚2)(𝐶) = 1
1−𝐾∑𝐴⋂𝐵=𝐶≠∅𝑚1(𝐴)𝑚2(𝐵) (7)
𝐾 = ∑𝐴⋂𝐵=∅𝑚1(𝐴)𝑚2(𝐵) (8)
In this case, Equation 7 calculates the cumulative belief for the set C given the sources of information A and B. If A and B do not have any element in common (i.e. in the presence of conflicting ev-idences), the term K is equal to 1 and the problem has no solution. In presence of incomplete or imprecise information, fuzzy logic can be used to perform a so-called approximate reasoning, via com-bining membership functions through a set of rules (IF… AND… OR… THEN). A membership function represent the possibility of an element x to be member of a certain set (for example, the set denoting “faulty compressor”). The difference from probability dis-tributions is the fuzziness of the membership function, which con-siders that x may be belong to both sets “faulty compressor” and “healthy compressor” with different degrees; whereas the probabil-ity theory tells us that the compressor is either faulty or not, and we have different levels of confidence in each proposition. An example of membership functions is shown in Figure 3. Logic IF/THEN rules can be used to determine the output function from the mem-bership degree of x to the various memmem-bership functions that are built based on expert knowledge [37,38].
Fig. 3. Example of fuzzy membership functions
FUSION ARCHITECTURES
Common information fusion systems can be classified depend-ing on the level on which data or other information are combined and fused together:
Sensor level fusion Feature level fusion Decision level fusion
The first strategy is used to combine data from various correlated sensors to enhance the quality of the information for diagnostics purpose. The second method combines features extracted from dif-ferent measurements or obtained through difdif-ferent data analysis methods to provide more information to the diagnostic tool(s). At the decision level, performance changes or events detection result-ing from multiple analysis methods are combined, often includresult-ing an assessment on the confidence level of the diagnosis. Results from a single fault detection system or from the fusion of multiple methods can also be combined with other information such as maintenance history, operator observations, experience from simi-lar units, etc. The complexity increases generally from the sensor level to the decision level. The three levels are depicted in Figure 4.
Fig. 4. Three levels of information fusion for diagnostic and deci-sion support systems
Sensor fusion level
Sensor level data fusion is used to combine measurements from different sensors with the purpose of validating the measurement values and/or detecting sensor malfunctions, and providing more reliable data to the diagnostic system. As for other levels of infor-mation fusion, the techniques for sensor data fusion space from a simple weighted average to Kalman filters, probabilistic methods (e.g. Bayesian or Dempster-Schafer theory), and fuzzy logic.
An approach for sensor fusion through fuzzy inference in a gas turbine power plant was proposed by Goebel and Agogino [39]. Values of important variables such as compressor outlet pressure,
p2, were computed from different combinations of other
measure-ments and compared with the measured value (e.g. measured p2). A confidence level was calculated for each measurement and the values were fused accordingly to provide a unique value with high confidence level. The proposed algorithm was proven to be robust toward sensor faults.
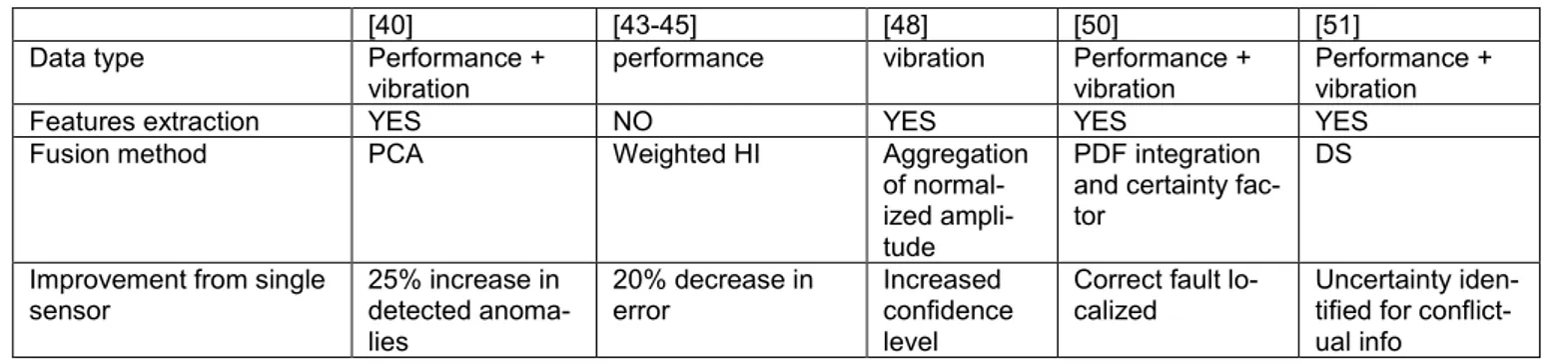
Fusion of vibration and gas path measurements through principal components analysis allowed to extract common features from var-ious sensors and perform anomaly detection on a heavy-duty gas turbine [40]. The fusion of information from hardware sensors and soft sensors for increased diagnostics effectiveness has also been tested and discussed [41]. An extended Kalman filter was employed in [42] to cope with time delay uncertainty in various sensors and fuse their information.
An interesting piece of work was presented by Liu et al. [43-45]. Sensors data were fused to obtain one Health Index that was used as an indication of system degradation and as the main parameter to calculate remaining lifetime in an aero-engine. Weight coefficients for the fusion function were calculated via quadratic programming to guarantee two properties of the Health Index: monotonic trend of degradation signal and minimal variance in degradation threshold. The progress from the early work to the most recent one includes the assessment at various operating conditions, by modeling the weights for combining sensor data as function of the engine operat-ing condition [45]. Similarly, Chen et al. selected a health indicator through a genetic algorithm optimization to fuse measurements data into a parameter that would give optimal results in anomaly detec-tion and remaining life estimadetec-tion [46].
Feature fusion level
An important step in data processing is the extraction of features, which is a common term to indicate processed measurements data that contain useful information for the diagnostics, prognostics, and decision-making levels. Common features extraction include data normalization against nominal or expected values to create a series of measurement deviations (as shown for example in [47]). When
dealing with acoustic or vibration measurements, statistical analysis is wildly used to extract information such as mean, standard devia-tion, skewness, etc.; spectrum analysis, often by means of Fourier transform, is commonly employed to extract features in the fre-quency domain [40].
Feature level fusion is thus very common for vibration monitor-ing. The comparison and aggregation of correlated measurements through statistical features extraction was proven successful for sensor faults detection [48]. Data fusion for vibration sensors in ro-tating machines was performed through a method called poly-co-herent composite spectrum, which combines information of ampli-tude and phase from all vibration measurements [49]. Kyriazis et al. combined features extracted from vibration sensors and from non-linear GPA through certainty factor fusion approach to select the health parameters for a subsequent GPA [50].
Similarly, a data fusion system for detection of foreign object damage (FOD) in a turbofan engine was developed based on fuzzy inference system to combine features extracted from GPA and vi-bration sensors and successive Dempster-Schafer theory for fusing the fuzzy diagnosis [51]. The evidence of FOD resulting from Kal-man filter estimations and vibration analysis were converted into probability functions through a fuzzy inference engine; these were consequently aggregated using Demspter-Schafer technique to de-termine the probability of FOD occurrence. It was pointed out by Turso and Litt, that the use of BBN for diagnostics and data fusion requires a precise knowledge on the conditional probabilities, either from test data or from well-understood distributions presented in the literature, which poses challenges [51].
Another example of multi-sensor information fusion in an air-craft engine was presented by Sarkar et al., by using symbolic dy-namic filtering to extract and combine features from various sensors and provide them to the diagnostic system [52].
Some of the data fusion methods for sensor and feature levels are summarized in Table 1, where the improvement with respect to using a single sensor is highlighted.
Table 1. Summary of data fusion methods
[40] [43-45] [48] [50] [51]
Data type Performance +
vibration
performance vibration Performance + vibration
Performance + vibration
Features extraction YES NO YES YES YES
Fusion method PCA Weighted HI Aggregation
of normal-ized ampli-tude
PDF integration and certainty fac-tor
DS
Improvement from single sensor 25% increase in detected anoma-lies 20% decrease in error Increased confidence level
Correct fault lo-calized
Uncertainty iden-tified for conflict-ual info
Decision fusion level
At the decision level, results from multiple independent diagnos-tic and prognosdiagnos-tic methods can be fused together to provide a more accurate and confident estimation, due to the fact that different tech-niques can be more suitable for identifying different problems. Es-timations from one or multiple methods can be also combined with other types of information: vibration analysis, maintenance history, behavior of similar units, observations during inspections, negative information, etc. These two approaches can be considered happen-ing at two levels, where the first one is automated decision level and the second one is supervised decision level. While the first level was object of extensive research, not many examples of the latter can be found in the literature; one interesting work on the integra-tion of the two layers of decision level fusion was presented in [53].
The simplest approach for information fusion is voting. Each di-agnostic method results in a classified fault, which counts as one vote. The fault that has the largest number of occurrences is selected
as the most likely. The main disadvantages with this approach is that in case of an even number of events and equal number of oc-currences, a final decision cannot be taken; furthermore, if wrong classifications occur at the first level, the same wrong conclusion may be drawn after the voting.
In a combined effort among NASA, Pratt&Whitney, and several technical companies, a framework for information fusion at feature level for aero engine diagnostics was proposed in 2004 [53]. Two levels of information fusion constituted the health management framework; the first level combined the information coming from GPA, an anomaly detection block based on ANN, and vibration and structural measurements. Health assessment of engine components and sensors could be performed at this level, which was in turn fed to the second tier, where the information was combined with maintenance history data and pilot observations to provide a sug-gestion on maintenance action. A Fuzzy Belief Network (FBN) was selected for the first information fusion layer, given its fast comput-ability, while a BBN constituted the second level.
In [54], an information fusion technique based on the integration of a Kalman filter and a BBN was presented. The Kalman filter was used for fault diagnostics and the BBN provided the a priori knowledge to the Kalman filter, fusing information coming for ex-ample from historical or statistic data. This first attempt was suc-cessful in improving the final diagnostic results. The challenge of different probability distributions required by the Kalman filter and provided by the BBN was overcome by converting the BBN results into a Gaussian distribution with same mean and variance.
Extensive work on this topic was performed by the research group at the National Technical University of Athens (NTUA) over the years 2000’s. Kyriazis et al. [55] proposed for the first time an information fusion system based on probabilistic data, and com-pared for this purpose a probabilistic neural network (PNN) and a dynamic Bayesian belief network (BBN). They used different diag-nostic methods for a first level diagdiag-nostics, including different pat-tern classification techniques and the use of PNN for fault classifi-cation. The results of the different diagnostic tools were combined in a K*W-dimensional vector, where K was the number of first level diagnostic techniques used and W was the number of faults. A set of vectors for various possible faults were used to train both a PNN and a BBN. The output of the probabilistic information fusion sys-tem was a vector with W elements, where each element corre-sponded to the probability for that particular fault to have occurred. Both information fusion techniques improved the final diagnostic result, but none seemed superior in the cases presented. The Authors didn’t make any comparison on the accuracy, computational time, time needed for training, etc.
The same Authors proposed later on the application of Demp-ster-Schafer technique for information fusion [56]. Results from two independent probabilistic diagnostic approaches (a PNN and a BBN) were combined through the DS technique to establish the most likely event. The probabilistic nature of the fault classification results from PNN and BBN made these methods perfect for the in-formation fusion technique proposed. A comparison with the previ-ous method was however not provided. The same DS technique was later extended to successfully detect gradual deterioration of engine components by fusing the results from a model-based tracking sys-tem and a statistical approach [57].
Successively, the same group of Authors proposed the use of lin-ear opinion pool for probability aggregation as information fusion technique [58,59]. In the first work, the results of two PNNs were aggregated through the linear opinion pool, which is a weighted av-erage of the probability functions for each health parameter, and a consensus vector was generated. Subsequently, two fuzzy logic ap-proaches were used to establish the most likely fault based on the consensus vector. Both approaches gave the same results, reducing the number of misclassifications. The same fusion technique was later applied in a second work, where non-linear GPA was used to identify health parameters in multiple sub-systems of the engine [60]. The probabilistic results for all the sub-systems were aggre-gated to select the fault parameters, and the non-linear GPA was performed a second time on the selected parameters to isolate the one that gave the maximum Diagnostic Index (ratio between mean value and standard deviation). In a further attempt to improve the fault classification system, the Authors proposed a new weighting procedure for the results from different diagnostics methods feeding the BBN fusion system [60]. A summary of their results on the in-vestigation of different fusion techniques is given in Table 2 below, where the number of misclassifications over the number of tested cases (radial or axial compressor cases) is presented. Since the in-vestigated cases were circa the same in all the work, a comparison of these results is effective for a preliminary assessment of the ben-efits of fusion techniques.
Table 2. Summary of fusion methods results for similar case studies applied to axial and radial compressors
[55] [56] [58] [59] [60] Best sin-gle method 0/24 (radial) 0/16 (axial) 2/15 (axial) 1/12 (ra-dial) 0/16 (axial) 4/15 (axial) 0/24 (ra-dial) 2/15 (axial) Worst sin-gle method 6/24 1/16 3/15 3/12 4/16 - 6/24 4/15 Best fu-sion method 2/24 0/16 1/15 0/12 0/16 1/15 0/24 2/15 Worst fu-sion method 2/24 1/16 - 1/12 2/16 - 5/24 4/15 Fusion
method BBN /PNN DS Fuzzy logic Proba-bilistic fusion
BBN
In the field of prognostics for aircraft engines, a fusion approach was applied to estimate the remaining useful life [61]. Three models for engine life estimation, based on Dempster-Schafer theory, sup-port vector machine (SVM), and recurrent NN respectively, were combined through the comentropy fusion technique. The comen-tropy index was calculated as a function of the prediction error of each method; this approach requires the availability of historical data to train the prognostic algorithms and estimate the prediction errors and consequent weights for the fusion method.
More recently, data fusion was used to estimate faults or engine degradation during transients [62]. The method was based on parti-cle filters applied to different engine partitions, whose results were weighted with their covariance and then fused by a master filter. The global estimates from the master filter were fed back to the lo-cal filters for the next time step. In a further work, the research group developed a diagnostic system based on the fusion at feature level between a machine learning algorithm and particle filter-fuzzy inference method [63]. Information fusion was accomplished by means of DS theory with evidence reliability coefficients and the results showed sufficient accuracy even in presence of modeling uncertainty. Lu et al. successively demonstrated the use of non-lin-ear Kalman filter with a distributed architecture for information fu-sion [64].
A generalized architecture for a health management fusion sys-tem was proposed in [65], where a BBN constituted the deeper de-cision level of information fusion and its conditional probabilities were based on the maintenance history and the reliability of the di-agnostic methods. In another work, a two-layer fusion approach for decision support was presented [66]. First, the outputs of several classifiers were decomposed into binary classifications, and a dy-namic fusion algorithm correlated the outcomes at different time epochs within a sliding window.
DISCUSSION
The choice of the best information fusion technique for diagnos-tics is highly dependent on the type of data that need to be combined. When the data are homogeneous, e.g. multiple sensor measure-ments of the same variable or performance deviations calculated by various algorithms, purely mathematical or statistical fusion tech-niques can be applied. Learning techtech-niques such as PNN and BBN have not appeared to perform always better, despite the more com-plex algorithms that aim to emulate human reasoning. When heter-ogeneous information need to be fused together, e.g. vibration and gas path measurements, BBN appears to be the preferred choice to handle information coming from very disparate sources. The work analyzed here is grouped in Table 3.
In gas turbine engines, useful information are limited by sensor availability and normally affected by noise and bias. In presence of such uncertainties, stochastic reasoning is preferred for decision making, which explains the wild popularity of BBN and DS meth-ods. However, expert systems and decision support systems are
ought to function in uncertain environments where information are often incomplete or lacking. Conditional probabilities of each event are usually impossible to know when setting up the information fu-sion system, and sufficient data to train the stochastic model may not be available. This represents a drawback of employing BBNs. Furthermore, as the nets become quite complex for the purpose of information fusion at decision level, with several nodes and con-nections, the conditional probabilities table grows exponentially and can easily become intractable. However, BBNs have been among the most used technique for information fusion at the deci-sion level, where the probabilistic reasoning is preferred. Similar considerations can be done for the use of PNNs, which require sig-nificant amount of data to be trained and do not appear therefore as a popular choice as information fusion algorithm.
Dempster-Schafer theory has been frequently selected for infor-mation fusion at all levels thanks to its probabilistic structure and the major flexibility compared to BBNs, since detailed a priori probabilities are not required to be known. Implementation of DS technique and estimation of the masses are simpler tasks than con-structing a conditional probabilities table for a large BBN. Among the cons, there is however a similar limitation in performing in pres-ence of fuzzy or incomplete information. Further, DS theory may not perform well in presence of conflicting evidences, even if mul-tiple modifications of the theory have been suggested to overcome this drawback.
Table 3. Summary of data fusion techniques for gas turbines Sensor level Feature
level Decision level Filters [42] [52] [62], [64] BBN [53], [54], [55], [60], [65] DS [51], [56], [57], [63] Fuzzy infer-ence [39] [51] [53], [58] PNN [50] Other statis-tical/ proba-bilistic [40] [48], [49], [50] [58], [59], [61]
Fuzzy inference hence appears to be an interesting choice for in-formation fusion, especially at the decision level, since it presents the following advantages:
it can deal with incomplete and fuzzy information, in-cluding conflicting evidences,
it does not require a priori knowledge of condition probabilities,
it is robust toward measurements uncertainty, it provides a confidence level associated with the
re-sults.
On the other hand, high expert knowledge or a large amount of training data are required to derive the fuzzy rules, on which the diagnostics accuracy depends. Fuzzy membership functions can be used for features fusion and combined with other probabilistic fu-sion methods as in [48] or in a structured net to form an FBN as presented in [50]. However, despite the remarkable advantages and the extensive use of fuzzy logic for diagnostics in gas turbine sys-tems, this technique has not been fully studied for information fu-sion purposes at the decifu-sion level.
Weights
One major concern is that the results from the fusion algorithm could be less accurate than the ones from a single diagnostic system, since they may be affected by the poorly performing methods in certain situations. To limit this risk, a common practice is to weight the inputs to the fusion algorithm. The weights should be related to the accuracy or importance of each feature or result, and hence come often from an a priori knowledge. Kyriazis and Mathioudakis proposed a weighting system based on the efficiency of the utilized diagnostics techniques (i.e. a higher weight was attributed to the technique with higher success rate) [60]. In [63], the weights of the inputs to the DS fusion scheme are a function of the evidence reli-ability for each fault detection method, as extracted from a confu-sion matrix. It was pointed out in [45] that different sensors can be more sensitive to variations in different operating conditions, there-fore, a model to calculate fusion weights as a function of operating conditions was proposed.
Satisfactory a priori knowledge of the weights is not always pos-sible. If sufficient information are not available, the weights could be estimated and consequently updated based on probabilistic dis-tributions of results. For transient operations or degradation moni-toring, the weights are often function of data scatter or covariance [57,62].
FUTURE PERSPECTIVES AND RECOMMENDATIONS Among the different methods presented, Bayesian networks had attracted the most interest, although the use of fuzzy logic may be more promising and should be more investigated and tested. Some comparison between fusion techniques at the decision level can be provided from the results obtained by the Authors in [55,56,58-60]. It appears that similar success rate can be achieved with different fusion techniques, leading to the consideration that the accuracy of the underlying diagnostic systems may be more important than the choice of a fusion method. However, a more systematic comparison of qualitative and quantitative aspects (e.g. computational time, dif-ficulty of integration into an existing system, etc.) is still lacking. Future research should cover these elements to achieve better con-clusions on the use of information fusion systems.
As part of the EU Horizon2020 project “FUDIPO” [67], the Au-thors are developing an integrated framework for monitoring, diag-nostics, and decision-making for a fleet of micro gas turbines. The proposed framework is depicted in Figure 5 and it includes a multi-level diagnostics and decision support system. Firstly, the measure-ments from plant sensors are collected from the existing process historian. After data assurance, a set of physics-based and data-driven models and diagnostic algorithms are used to perform fault detection, isolation, and identification. Trend analysis on sensors data is performed as well and trends are compared within the fleet to detect anomalies. Finally, outputs from all the diagnostic tools are fed to a BBN-based decision support system that will provide a ranking of most probable faults. These activities are meant to run in parallel for a fleet of micro gas turbines that are distributed over a large geographical area.
Successful application of a fault detection and identification sys-tem on a micro gas turbine was achieved by integrating an adaptive model for GPA and data correction with a statistical algorithm [68]. Similarly, the diagnostic system was demonstrated on a large unit from Siemens Industrial Turbomachinery [69]. Automated decision support becomes essential when moving to micro-units and distrib-uted generation systems, since the operators in case of residential applications are simple consumers with no engineering experience. With thousands of units in the fleet, the development of such deci-sion support systems that leave only a supervisory role to the ser-vice engineer is crucial.
CONCLUSIONS
Data fusion techniques are widely used in gas turbine applica-tions at sensors and features level, especially in the aeronautical field. At the decision level, implementation of information fusion systems for diagnostics and prognostics is however limited. Due to the uncertain nature of sensor measurements and numerical models, probabilistic techniques such as Bayesian Network and Dempster-Schafer have been mostly selected so far. However, fuzzy inference appears to be promising to deal with incomplete and fuzzy infor-mation, and should be hence more investigated for this purpose. From a comparison between different methods and techniques, it seems that the accuracy of the underlying diagnostic methods plays the greatest role. Since each diagnostic method may perform differ-ently depending on the operating conditions or the type of fault, the selection of weights for the fusion system is a complex task, not always possible with a priori knowledge. Although complex deci-sion support structures integrating historical information were the-orized in the 90’s, real-world implementations of such multi-layer fusion system are not numerous.
The challenges relate to contradictory event classifications, in-complete information, and heterogeneous data. Future work has to be devoted to a quantitative and qualitative comparison of various existing methods, address the challenges, and demonstrate a real-world application.
ACKNOWLEDGEMENT
The work was partially funded by the EU Horizon 2020 project FUDIPO and by the Swedish Knowledge Foundation (KKS). REFERENCES
[1] Gorinevsky D., Matthews B., Martin R., 2012, “Aircraft Anomaly Detection using Performance Models Trained on Fleet Data”, Conference on Intelligent Data Understanding. [2] Simon D.L., Rinehart A.W., 2014, “A model-based anomaly
detection approach for analyzing streaming aircraft engine measurement data”, Proceedings of ASME Turbo Expo 2014:
Turbine Technical Conference and Exposition, June 16 – 20,
2014, Düsseldorf, Germany. GT2014-27172.
[3] Tolani D., Yasar M., Ray A. and Yang V., 2006, “Anomaly De-tection in Aircraft Gas Turbine Engines”, Journal of Aerospace
Computing Information and Communication, Vol. 3(2), pp.
44-51, DOI: 10.2514/1.15768.
[4] Liu Y., 2017, “Design of fault detection system for a heavy duty gas turbine with state observer and tracking filter”,
Proceed-ings of ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, June 26-30, 2017, Charlotte, NC,
USA. GT2017-64089.
[5] Tsoutsanis E., Meskin N., Benammr M., Khorasani K., 2015, “Transient Gas Turbine Performance Diagnostics Through Nonlinear Adaptation of Compressor and Turbine Maps,”
Journal of Engineering for Gas Turbines and Power, Vol. 137,
DOI: 10.1115/1.4029710.
[6] Hosseini S.H.R., Khaledi H., Solani M.R., 2009, “New Model Based Gas Turbine Fault Diagnostics Using 1D Engine Model and Nonlinear Identification Algorithms”, Proceedings of
ASME Turbo Expo 2009: Power for Land, Sea and Air, June
8-12, 2009, Orlando, Florida, USA. GT2009-59439.
[7] Mathioudakis K., Kamboukos P., and Stamatis A., 2004, “Gas turbine component fault detection from a limited number of measurements.” Journal of Power and Energy, Vol. 218(8), pp. 609-618.
[8] Jaw L.C., Lee Y.J., 2014, “Engine diagnostics in the eyes of machine learning” Proceedings of ASME Turbo Expo 2014:
Turbine Technical Conference and Exposition, June 16 – 20,
2014, Düsseldorf, Germany. GT2014-27088.
[9] Vatani A., Khorasani K., Meskin N., 2015, “Health monitoring and degradation prognostics in gas turbine engines using dy-namic neural networks”, Proceedings of ASME Turbo Expo
2015: Turbine Technical Conference and Exposition, June 15 –
19, 2015, Montréal, Canada. GT2015-44101.
[10]Tahan M., Tsoutsanis E., Muhammada M., Karim Z.A.A., 2017, “Performance-based health monitoring, diagnostics and prog-nostics for condition-based maintenance of gas turbines: A re-view”, Applied Energy, Vol. 198, pp. 122–144, doi: 10.1016/j.apenergy.2017.04.048.
[11] Verbist M.L., Visser W.P.J., Van Buijtenen J.P., 2011, “Gas path analysis on KLM in-flight engine data”, Proceedings of ASME
Turbo Expo 2011, June 6-10, 2011, Vancouver, British
Colum-bia, Canada. GT2011-45625.
[12] Marinai L., Singh R., 2005, “A bias-tolerant gas path diagnos-tics aproach based on fuzzy logic”, International Symposium
of Air Breathing Engines, ISABE-2005-1285.
[13] Zarate L.A.M., Loboda I., 2015, “Computation and monitoring of the deviations of gas turbine unmeasured parameters,”
Pro-ceedings of ASME Turbo Expo 2015: Turbine Technical Con-ference and Exposition, June 15 – 19, 2015, Montréal, Canada,
GT2015-43862.
[14] Volponi A. J., 1999, “Gas Turbine Parameter Corrections”,
ASME Journal of Engineering for Gas Turbines and Power,
Vol. 121(4), pp. 613–621.
diagnostics – remote, real-time and automation,” Proceedings
of ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, June 16 – 20, 2014, Düsseldorf, Germany,
GT2014-27314.
[16] Zhang Y., Martínez-García M., Latimer A., 2018, “Selecting optimal features for cross-fleet analysis and fault diagnosis of industrial gas turbines”, Proceedings of ASME Turbo Expo
2018: Turbomachinery Technical Conference and Exposition,
June 11-15, 2018, Oslo, Norway. GT2018-75286.
[17] Zhang Y., Jombo G., and Latimer A., 2018, “A Knowledge Transfer Platform for Fault Diagnosis of Industrial Gas Tur-bines.” In 22nd IEEE International Conference on Intelligent
Engineering Systems, June 21-23, 2018, Las Palmas de Gran
Canaria, Spain.
[18] Romessis C., Li Y.G., 2013, “Condition-based maintenance for gas turbines plants.” https://www.semanticscholar.org/pa- per/CONDITION-BASED-MAINTENANCE-FOR-GAS-
TURBINES-PLANTS- Romesis/90fb311a711721a6189f9ed2e88ca349b9fa11d8#cit-ing-papers (accessed on 07/15/2019).
[19] Breese J.S., Horvitz E.J., Peot M.A., Gay R., Quentin G.H., 1992, “Automated Decision-Analytic Diagnosis of Thermal Performance in Gas Turbines.” Proceedings of ASME
Interna-tional Gas Turbine and Aeroengine Congress and Exposition,
Cologne, Germany June 1-4, 1992. 92-GT-399.
[20] Palmer C.A., 1998, “Combining Bayesian belief networks with gas path analysis for test cell diagnostics and overhaul.”
Pro-ceedings of ASME International Gas Turbine and Aeroengine Congress and Exposition, Stockholm, Sweden, June 2-June 5,
1998. 98-GT-168.
[21] Hansen R.J., Hall D.L., and Kurtz S.K., 1994, “A new approach to the challenge of machinery prognostics.” Proceedings of
ASME International Gas Turbine and Aeroengine Congress and Exposition, The Hague, Netherlands, June 13-16, 1994.
94-GT-003.
[22] Hall D.L., Hansen R.J., Lang D.C., 1996, “The Negative In-formation Problem in Mechanical Diagnostics.” Proceedings
of ASME International Gas Turbine and Aeroengine Congress and Exposition, Birmingham, UK, June 10-13, 1996.
96-GT-035.
[23] Roemer M.J. and Kacprzynski G.J., 2000, “Advanced Diag-nostic and ProgDiag-nostic Technologies for Gas Turbine Engine Risk Assessment.” Proceedings of ASME TURBO EXPO 2000, May 8-11, 2000, Munich, Germany. 2000-GT-30.
[24] Sun S.L., and Deng Z.L., 2004, “Multi-sensor optimal infor-mation fusion Kalman Filter.” Automatica, Vol. 40, pp. 1017 – 1023, doi:10.1016/j.automatica.2004.01.014.
[25] Roemer, M. J., Kacprzynski, G. J., and Schoeller, M. H., 2001, “Improved Diagnostic and Prognostic Assessments Using Health Management Information Fusion,” AUTOTESTCON
Proceedings, IEEE Systems Readiness Technology Conference,
IEEE Publ., Piscataway, NJ, 2001, pp. 365–377.
[26] Kjræulff U. B. and Madsen A. L., 2013, “Bayesian networks and influence diagrams : a guide to construction and analysis.”
Springer, ISBN 978-0-387-74101-7.
[27] Weber P. and Simon C., 2016, “Benefits of Bayesian Network Models.” Hoboken, NJ, USA: John Wiley & Sons, Inc. [28] Martin T.G., Burgman M.A., Fidler F., Kuhnert P.M.,
Low-Choy S., Mcbride M., Mengersen K., 2012, “Eliciting expert knowledge in conservation science,” Conserv. Biol., Vol. 26, no. 1, pp. 29–38.
[29] Adel T. and de Campos C. P., 2017, “Learning Bayesian net-works with incomplete data by augmentation,” in Thirty-First
AAAI Conference on Artificial Intelligence, 2017.
[30] Tsamardinos I., Brown L. E., and Aliferis C. F., 2006, “The max-min hill-climbing Bayesian network structure learning al-gorithm,” Mach. Learn., Vol. 65, no. 1, pp. 31–78.
[31] Gou K. X., Jun G. X., and Zhao Z., 2007, “Learning Bayesian Network Structure from Distributed Homogeneous Data,” in
Eighth ACIS International Conference on Software Engineer-ing, Artificial Intelligence, NetworkEngineer-ing, and Parallel/Distrib-uted Computing (SNPD 2007), Vol. 3, pp. 250–254.
[32] Alonso-Barba J. I., delaOssa L., Gámez J. A., Puerta J. M., 2013, "Scaling up the Greedy Equivalence Search algorithm by constraining the search space of equivalence classes,"
Interna-tional Journal of Approximate Reasoning, vol. 54, pp. 429-451.
[33] Heckerman D., Geiger D., and Chickering D. M., 1995, “Learning Bayesian networks: The combination of knowledge and statistical data,” Mach. Learn., Vol. 20, no. 3, pp. 197–243. [34] Romessis C., Stamatis A., Mathioudakis K., 2001, "Setting up a belief network for turbofan diagnosis with the aid of an en-gine performance model," International Symposium of Air
Breathing Engines, ISABE, vol. 1032, pp. 19-26.
[35] Romessis C. and Mathioudakis K., 2004, "Bayesian network approach for gas path fault diagnosis," Journal of engineering
for gas turbines and power, vol. 128, pp. 64-72,
doi:10.1115/1.1924536.
[36] Lee Y. K., Mavris D. N., Volovoi V. V., Yuan M., Fisher T., 2010, "A fault diagnosis method for industrial gas turbines us-ing Bayesian data analysis," Journal of engineerus-ing for gas
tur-bines and power, vol. 132, p. 041602, DOI: 10.1115/1.3204508.
[37] Ganguli R., 2001, “Application of fuzzy logic for fault isola-tion of jet engines”, Proceedings of ASME Turbo Expo 2001, June 4-7, 2001, New Orleans, Louisiana. 2001-GT-0013. [38] Lipowsky H., Staudacher S., Nagy D., Bauer M., 2008, “Gas
turbine fault diagnostics using a fusion of least squares estima-tions and fuzzy logic rules”, Proceedings of ASME Turbo Expo
2008: Power for Land, Sea and Air, June 9-13, 2008, Berlin,
Germany. GT2008-50190.
[39] Goebel K., and Agogino A.M., 1999, “Fuzzy sensor fusion for gas turbine power plants.” Proceedings of SPIE 1999 - The
In-ternational Society for Optical Engineering, Vol. 3719, pp.
52-61, DOI: 10.1117/12.341370.
[40] Diallo O., Mavris D., 2011, “A data analytics approach to fail-ure precursor detection of gas turbine”, Proceedings of ASME
Turbo Expo 2011, June 6-10, 2011, Vancouver, British
Colum-bia, Canada. GT2011-46019.
[41] Scheianu D., 2012, “Development of fault specific soft sensors with application to gas turbine diagnosis.” Proceedings of
ASME Turbo Expo, June 11-15, 2012, Copenhagen, Denmark.
GT2012-69662.
[42] Lu F., Gao T., Huang J., Qiu X., 2019, “A novel distributed extended Kalman filter for aircraft engine gas-path health esti-mation with sensor fusion uncertainty,” Aerospace Science and
Technology, Vol. 84, pp. 90-106. Doi: 10.1016/j.ast.2018.10.019.
[43] Liu K., Gebraeel N.Z., and Shi J., 2013, "A data-level fusion model for developing composite health indices for degradation modeling and prognostic analysis," IEEE Trans. Autom. Sci.
Eng., Vol. 10, no. 3, pp. 652–664.
[44] Liu K. and Huang S., 2014, "Integration of data fusion meth-odology and degradation modeling process to improve prog-nostics," IEEE Trans. Autom. Sci. Eng., Vol. 13, no. 1, pp. 344– 354.
[45] Yan H., and Liu K., 2016, “Multiple Sensor Data Fusion for Degradation Modeling and Prognostics Under Multiple Oper-ational Conditions,” IEEE Transactions on Reliability, Vol. 65, No. 3.
[46] Chen S., Wen P., Zhao S., Huang D., Wu M., Zhang Y., 2018, “A Data Fusion-based Methodology of Constructing Health In-dicators for Anomaly Detection and Prognostics,”
Interna-tional Conference on Sensing, Diagnostics, Prognostics, and Control. DOI 10.1109/SDPC.2018.00110.
[47] Li Y.G., 2010, “Gas Turbine Performance and Health Status Estimation Using Adaptive Gas Path Analysis”, ASME Journal
of Engineering for Gas Turbines and Power, Vol. 132, No. 4.
[48] Yan W. and Goebel K., 2003, “Sensor Validation and Fusion for Gas Turbine Vibration Monitoring.” Proceedings of SPIE -
The International Society for Optical Engineering, Vol. 5107,
DOI: 10.1117/12.487206.
[49] Yunusa-Kaltungo A., Sinha J.K., Elbhbah K., 2014, “An im-proved data fusion technique for faults diagnosis in rotating machines.” Measurement, Vol. 58, pp. 27-32, doi: 10.1016/j.measurement.2014.08.017.
[50] Kyriazis A., Tsalavoutas A., Mathioudakis K., Bauer M., Jo-hanssen O., 2009, “Gas Turbine Fault Identification by Fusing Vibration Trending and Gas Path Analysis”, Proceedings of
ASME Turbo Expo. June 8-12, 2009, Orlando, Florida, USA.
GT2009-59942.
[51] Turso J., Litt J., 2004, “A Foreign Object Damage Event De-tector Data Fusion System for Turbofan Engines”, NASA STI
Program Office report, NASA/TM—2004-213192.
[52] Sarkar S., Sarkar S., Mukherjee K., Ray A., Srivastav A., 2012, “Multi-sensor information fusion for fault detection in aircraft gas turbine engines.” J. Aerospace Engineering, Vol. (0), pp. 1–14, DOI: 10.1177/0954410012468391.
[53] Volponi A., Brotherton T., Luppold R., Simon D.L., 2004, “De-velopment of an Information Fusion System for Engine Diag-nostics and Health Management” NASA/TM—2004-212924.
In: 39th Combustion/27th Airbreathing Propulsion/21st Pro-pulsion Systems Hazards/3rd Modeling and Simulation Joint Subcommittee Meeting sponsored by the Joint-Army-Navy-NASA-Air Force Interagency Propulsion Committee
(JANNAF), Colorado Springs, Colorado, December 1–5, 2003. [54] Dewallef P., Romessis C., Léonard O., Mathioudakis K., 2004,
“Combining Classification Techniques with Kalman Filters for Aircraft Engine Diagnostics”, Proceedings of ASME Turbo
Expo, June 14-17, 2004, Vienna, Austria. GT2004-53541.
[55] Kyriazis A., Arethkis N., Mathioudakis K., 2006, “Gas turbine fault diagnosis from fast response data using probabilistic methods and information fusion.” Proceedings of ASME Turbo
Expo 2006: Power for Land, Sea and Air. May 8-11, 2006,
Bar-celona, Spain. GT2006-90362.
[56] Romessis C., Kyriazis A., Mathioudakis K., 2007, “Fusion of gas turbines diagnostic inference – the Dempster-Schafer ap-proach.” Proceedings of ASME Turbo Expo 2007: Power for
Land, Sea and Air. May 14-17, 2007, Montreal, Canada.
GT2007-27043.
[57] Romessis C., Mathioudakis K., 2009, “Estimation of gas tur-bines gradual deterioration through a Dempster-Schafer based fusion method.” International Symposium of Air-Breathing
En-gines ISABE. ISABE-2009-1301.
[58] Kyriazis A., Mathioudakis K., 2009, “Gas Turbine Fault Diag-nosis Using Fuzzy-based Decision Fusion.” Journal of
Propul-sion and Power, Vol. 25, Issue 2, pp. 335-343, DOI:
10.2514/1.38629.
[59] Kyriazis A., Mathioudakis K., 2009, “Enhanced fault localiza-tion using probabilistic fusion with gas path analysis algo-rithms.” J. Eng. Gas Turbines Power, Vol. 131.
[60] Kyriazis A., Mathioudakis K., 2009, “Gas turbines diagnostics using weighted parallel decision fusion framework.” 8th
Euro-pean Turbomachinery Conference, March 23-27, 2009, Graz,
Austria.
[61] Xu J., 2014, “PHM-Oriented Integrated Fusion Prognostics for Aircraft Engines Based on Sensor Data,” IEEE Sensors
Jour-nal, Vol. 14, no. 4. Doi: 10.1109/JSEN.2013.2293517.
[62] Lu F., Wang Y., Huang J., Huang Y., 2015, “Gas Turbine Tran-sient Performance Tracking Using Data Fusion Based on an Adaptive Particle Filter.” Energies, Vol. 8, pp. 13911–13927, doi:10.3390/en81212403.
[63] Lu F., Jiang C., Huang J., Wang Y., and You C., 2016, “A Novel Data Hierarchical Fusion Method for Gas Turbine Engine Per-formance Fault Diagnosis,” Energies, Vol. 9, pp. 828; doi:10.3390/en9100828.
[64] Lu F., Wang Y., Huang J., Qiu X., 2018, “Gas turbine perfor-mance monitoring based on extended information fusion filter,”
Proceedings of the Institution of Mechanical Engineers Part G
Journal of Aerospace Engineering, DOI: 10.1177/0954410018776398.
[65] Yu L.J., Cleary D., Osborn M., Rajiv V., 2007, “Information fusion strategy for aircraft engine health management”,
Pro-ceedings of ASME Turbo Expo 2007: Power for Land, Sea and Air. May 14-17, 2007, Montreal, Canada. GT2007-27174.
[66] Kodali A., Donat W., Singh S., Choi K., Pattipati K., 2008, “Dynamic Fusion and Parameter Optimization of Multiple Classifier Systems”, Proceedings of ASME Turbo Expo 2008:
Power for Land, Sea and Air, June 9-13, 2008, Berlin,
Ger-many. GT2008- 51274.
[67] https://fudipo.eu/whats-fudipo/ (accessed on 30-4-2019). [68] Rahman, M., Zaccaria, V., Zhao, X., Kyprianidis, K., 2018,
“Diagnostics-oriented modelling of micro gas turbines for fleet monitoring and maintenance optimization.” Processes, Vol. 6, pp. 1-22.
[69] Zaccaria V., Stenfelt M., Sjunnesson A., Hansson A., Kypri-anidis K., 2019, “A model-based solution for gas turbine diag-nostics: simulations and experimental verification”,
Proceed-ings of the ASME TURBO EXPO 2019: Power for Land, Sea and Air, June 11-15, 2019, Phoenix, Arizona, USA.