En övergripande studie av
undervattensdockning med
obemannade farkoster i ubåt
A26
Examensarbete
Erik Abrahamsson eriabr@kth.se
Institutionen för Marina system
Kungliga Tekniska Högskolan
Stockholm, Sverige
Sammanfattning
I den här rapporten behandlas ett Systems Engineering arbete där en under-sökning har utförts på möjligheten att docka en autonom undervattensfarkost med den nya generationens ubåt A26. I arbetet har fokus legat på de tidiga stegen inom Systems Engeineering disciplinen. En litteraturstudie på befintlig forskning och arbete inom området har utförts för att kartlägga idag möjliga tekniska lösningar. Intressenter har identifierats och personer med nyckelbefatt-ningar inom sitt respektive område har intervjuats för att kunna sammanställa en behovsbild. Utifrån behoven har förmågor som systemet behöver möta kart-lagts. I syfte att underlätta analysen av dockningssystemet har en definition samt en zonuppdelning av dockningsförfarandets olika faser utförts. En beskriv-ning av olika tekniker för undervattenskommunikation redovisas och diskuteras. En utvärdering och riskanalys av ett dockningssystem har utförts för att belysa de olika kommunikationsteknikernas för- och nackdelar under ett dockningsför-farande. Slutligen har två mekaniska system för slutfasen i en dockning jämförts mot varandra.
Abstract
In this report, a Systems Engineering work is discussed, where an investigation has been carried out on the possibility of docking an autonomous underwater vessel with the new generation submarine A26. In the work, the focus has been on the early steps of the Systems Engineering discipline. A literature review of existing research and work in the field has been carried out in order to identify possible technical solutions accessible today. Stakeholders have been identified and people with key positions in each area have been interviewed to be able to compile the requirement of needs. Based on the needs, abilities that the system needs to meet have been mapped. In order to facilitate the analysis of the docking system, a definition as well as a zoning of the various stages of the docking process have been performed. A description of different technologies for underwater communication is shown and discussed. An evaluation and risk analysis of a docking system has been carried out to illustrate the pros and cons of the various communication technologies during a docking procedure. Finally, two mechanical systems for the final phase of a docking have been compared to each other.
Förord
Den här rapporten är ett examensarbete vid Kungeliga Tekniska Högskolan, KTH, för instutionen för Marina System. Arbetet utfördes på Försvarets Mate-rielverk, FMV, på avdelningen för Marinmaterial Uv Vapen i Stockholm. Exa-mensarbetet utfördes mellan 20181001-20190501
Författaren skulle vilja ge ett stort tack till Matteo Perrone på FMV för väg-ledning, tålamod och stöd genom hela projektet där han hela tiden gett positiv uppmuntran och visat vägen framåt i arbetet.
Ett stort tack ges också till Filip Söderling, doktorand på KTH, för handledning, utmärkt feedback, diskussioner och bollande av ideér och koncept.
Examinator Jakob Kuttenkeuler tackas också för hans tålamod och stora hjälp under detta arbete.
Ett stort tack ges även till min bror Mathias Lindgren, system ingenjör på Försvarsmakten (marinen), för diskussioner och kunskap inom ämnet.
Innehåll
1 Förkortningar 6 2 Inledning 7 2.1 Mål och syfte . . . 7 3 Bakgrund 8 3.1 A26 . . . 8 3.1.1 FPL . . . 8 3.2 Obemannade system . . . 9 3.2.1 AUV . . . 9 3.2.2 ROV . . . 10 3.3 Behov/Taktik . . . 113.3.1 Självskydd och verkansområde . . . 12
3.3.2 Framskjutet dolt system . . . 12
3.3.3 Minkrigsföring . . . 13
3.3.4 Skenmål och vilseledning . . . 14
4 Systems Engineering 14 4.0.1 Informationsinhämtning . . . 15 4.1 Intressenter . . . 15 4.2 Aktiva Intressenter . . . 16 4.2.1 Försvarsmakten (ubåtsflottiljen) . . . 16 4.2.2 Operatörer . . . 16 4.2.3 Naturliv . . . 16 4.3 Passiva Intressenter . . . 16 4.3.1 Försvarsmakten . . . 17 4.3.2 FMV . . . 17 4.3.3 FOI . . . 17 4.3.4 Industrin . . . 17 5 Dockning 17 5.1 Mjuk dockning . . . 18 5.2 Hård dockning . . . 18
5.3 Manöverklass och detekterings klasser . . . 19
5.3.1 Bottenliggande . . . 19 5.3.2 Svävande . . . 19 5.3.3 Framfart . . . 19 5.3.4 Detekterings Klasser . . . 19 5.4 Zon Indelning . . . 20 5.4.1 Fjärrzon . . . 20 5.4.2 Inkallningszon . . . 20 5.4.3 Rendezvouszon . . . 20 5.4.4 Dockningszon . . . 21 5.4.5 Infångningszon . . . 21
5.4.6 Ombordtagningszon . . . 21
6 Undervattenskommunikation 22 6.1 Akustik . . . 22
6.2 Sikt i vatten . . . 22
6.3 Optisk siktsträcka i Östersjön . . . 22
6.4 Optiska tekniker . . . 23 6.4.1 LIDAR . . . 23 6.4.2 Avståndsgrindad avbildning . . . 24 6.5 Magnetism . . . 24 7 Systemanalys 25 7.1 Beskrivning av sensorutvärdering . . . 25 7.2 Beskrivning av riskanalys . . . 25 7.3 Rendezvouszon . . . 26 7.3.1 Utvärdering sensorer . . . 26 7.3.2 Risksanalys . . . 26 7.4 Dockningszon . . . 27 7.4.1 Utvärdering sensorer . . . 27 7.4.2 Risksanalys . . . 28 7.5 Infångningszon . . . 28 7.5.1 Utvärdering sensorer . . . 28 7.5.2 Riskanalys . . . 29 8 Systemkoncept för Hård docking 30 8.1 Lastbryggan . . . 30
8.1.1 Fördelar och nackdelar . . . 31
8.2 Tratt . . . 31
8.2.1 Fördelar och nackdelar . . . 32
9 Diskussion och slutsats 33
1
Förkortningar
Förkortning Klartext
AUV Autonumous Underwater Vehicle BL Bottenliggande
FF Framfart
FM Försvarsmakten FPL Flexible Payload Lock FMV Försvarets Materialverk
FOI Totalförsvarets forskningsinstitut FPL Flexible Payload Lock
HF Högfrekvent
KBL Kollisionsrisk Bottenliggande KFF Kollisionsrisk Framfart KSV Kollisionsrisk Svävande LARS Launch and Recovery System LIDAR Light detection and ranging
LF Lågfrekvent
NGU Nya Generations Ubåt ROV Remote Underwater Vehicle
SV Svävande
UV Undervattens
2
Inledning
För att kunna upprätthålla förmågan att försvara Sveriges territorialvatten har Försvarsmakten beställt två ubåtar av FMV av typ A26: Ny Generation Ubåt (NGU). Ubåtarna ska konstrueras och tillverkas av Saab Kockums AB de när-maste åren. A26 presenterar en unik design genom att vara den första ubåts-klassen i världen utrustad med en så kallad Flexible Payload Lock (FPL). FPL är en stor tub placerad i ubåtens för och kan användas för olika ändamål. En av dem är att kunna slussa obemannade farkoster (UUV) in och ut från ubåten i dolt läge om eller när det behövs. En viktig funktion är att kunna docka UUV och specifikt Autonomous Underwater Vehicles (AUV) till FPL. Detta ska gö-ras under vissa förutsättningar, till exempel att de ska inte för en fiende vara möjligt att genom ljud som uppstår vid dockningen vara möjligt att lokalisera ubåten eller AUV.
2.1
Mål och syfte
Målsättningen med den här rapporten är att presentera en övergripande studie av tekniskt möjliga och genomförbara lösningar för att få en AUV att docka med försvarsmaktens nya ubåt A26. Ett system engineering perspektiv på arbetet kommer implementeras där intressenters behov ska identifieras och systemets förmågor ska tas fram. Utgångspunkt i arbetet har varit i befintliga system, tekniska lösningar och forskning i syfte att kunna sätta samman dessa till ett koncept för ett fungerande system.
3
Bakgrund
3.1
A26
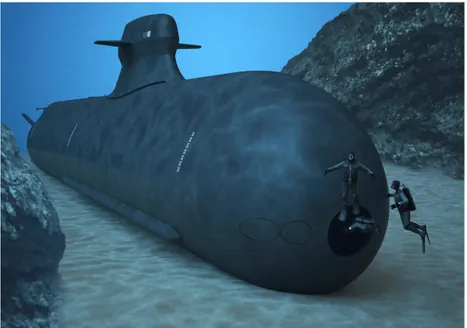
Ubåt A26 (figur 1) är Sveriges nya generations ubåt som är under utveckling av FMV och Saab. 2015 beställde FMV och Försvarsmakten två stycken A26 av Saab Kockums AB som ska levereras 2022 [1]. De två nya ubåtarna kommer få namnen HMS Blekinge och HMS Skåne. A26 anses vara när den blir levererad en av världens modernaste och tystaste ubåtar med många unika funktioner och nya tekniker. A26 bygger på gamla tidigare svenska ubåtar så som den senaste Gotlands klassen och dess framgångsrika Stirling koncept. A26 är designad att kunna operera över hela världen till skillnad från tidigare svenska ubåtsklasser som designades för att operera i och runt om svenska territorialvatten.
Figur 1: Översikt av ubåt A26. 3.1.1 FPL
En lösning på A26 som är unik i världen är en större sluss i fören av ubåten likt en torpedtub, Flexible Payload lock (FPL), (figur 2). Som namnet antyder är tanken att den ska användas till en rad olika funktioner. Vad som gör den speciell är att den är mycket större än en torpedtub och kan användas till att slussa dykare, specialförband in och ut och även AUV:er och ROV:ar. En annan detalj som gör den unik är att den är tyst när den öppnas och stängs. Det medför att den röjer inte ubåtens position då den öppnas och kan då användas i riskfyllda områden och situationer där risk för detekterings av fienden är stor. För att kunna hantera de förmågor som FPL:en medför har A26 även ett större lastutrymme för vapen och farkoster jämfört med dagens ubåtssystem.
Figur 2: Dykare slussas genom FPL:en, stora hålet i mitten. Notera de mindre torpedtuberna till vänster om FPL:en.
3.2
Obemannade system
Obemannade undervattensfarkoster (UUV) inkluderar två olika sorters robotar, AUV:er (Autonomous Underwater Vehicle) och ROV (Remotely Operated Un-derwater Vehicle). En ROV är en fjärrstyrd robot som en operatör manövrerar från ett moderfartyg genom en kabel fäst i roboten. Därför begränsas en ROVs manöverområde till längden på kabeln i vilken den är fäst. En AUV till skillnad från en ROV manövrerar och utför sitt uppdrag utan mänsklig inblandning och förlitar sig till sin inbyggda intelligens och en mängd sensorer för att fatta beslut [2]. Eftersom en AUV måste fatta sina egna beslut begränsas dess förmåga att manövrera och utföra uppdrag av sina sensorer och storleken på den inbygg-da intelligensen. Det finns en mängd olika användningsområden både civilt och militärt för UUVer. Inom till exempel oljeindustrin till havs används de för att bygga och inspektera konstruktioner och rörledningar. Militära applikationer är många och presenteras i nästa avsnitt med fokus på användning från ubåt. I det här arbetet har fokus legat på AUV:er, inget arbete har gjorts på analys av användning av en ROV i FPL:en.
3.2.1 AUV
En AUV är en autonom undervattensfarkost, det betyder att den opererar utan mänsklig kontroll och förlitar sig på sin mjukvara och sensorer vid navigering
och manövrering. AUV:er kommer i en mängd olika former och storlekar, den vanligaste är dock att en AUV är formad som en torped (figur 3). En torped-formad AUV är en bra kompromiss mellan storlek, nyttolast kapacitet, hydro-dynamiska egenskaper och enkel hantering [3]. Storleken på en AUV varierar kraftig från små handburna till större flera meter långa farkoster som kräver större och mer komplicerade LARS (Launch and Recovery System). Storlek på batterier har stor inverkan på en AUV:s uthållighet, från figur 6.2, 6.3 och 6.4 i [4] kan man generellt säga att desto större en AUV är desto större är de-ras uthållighet och dykdjup, vidare kan det även ses att med högre hastighet minskar uthålligheten. Försvarsmakten använder idag SAPPHIRES (Synthetic Aperture Processing High Resolution System), ett system som bygger på Saabs AUV62-MR. Den är designad för att lokalisera UV-minor och är utrustad med en stark sonar. SAPPHIREs styrka ligger i att systemet snabbt kan söka efter små föremål över stora ytor med stor noggrannhet, det har gjort att den även kan användas i civila syften för att till exempel lokalisera försvunna personer efter drunkningsolyckor [5].
Figur 3: Saabs torpedformade AUV62. 3.2.2 ROV
Till skillnad från en AUV är en ROV operatörsstyrd, en ROV styrs och kraftför-sörjs via en kabel som den är ansluten till. Det finns både för- och nackdelar med att den är ansluten via kabel. Som fördel kan man nämna att en operatör direkt kan påverka ROV:ns manövrering samt ta emot data direkt länkad från de sen-sorer som ROV:en bär med sig till en monitor. Vanligt är att ROV utrustas med med armar och gripklor för att kunna utföra olika uppgifter, som till exempel placera en sprängladdning bredvid en lokaliserad mina som ska destrueras. Då
en ROV har begränsad räckvidd är den inte lika lämplig för spaningsuppdrag som en AUV, men till skillnad från AUV kan den utföra mer komplicerade me-kaniska uppgifter. Idag använder försvarsmakten en Saab tillverkad modell som heter Subrov (Submarine Remotely Operated Vehicle), (figur 4). Subrov kan idag operera från en standard torpedtub på en svensk ubåt utan att behöva mo-difiera varken torpedtub eller ubåt. Svenska FM använder Subroven till bland annat minröjning, spaning, inspektion av egen ubåt och AUV återhämtning [6].
Figur 4: Saabs Subrov som idag används av Försvarsmakten.
3.3
Behov/Taktik
Argumenten för att använda obemannade system såsom AUV:er och ROV:er tillsammans med ubåtar är många och en teknikutveckling för framtiden som är svår att blunda inför. Tekniken och taktiken med att använda obemannade luftfarkoster som till exempel drönare har sedan länge använts av olika natio-ners vapengrenar för olika ändamål. AUV:er och ROV:er skulle potentiellt ha möjlighet att användas av den svenska marinen för samma taktiska ändamål under havsytan. En av de största fördelarna med att använda obemannade system är de möjliggör att man avlägsnar människan från potentiella farliga situationer och områden. I det här kapitlet belyses de taktiska fördelarna och användningsområdena för obemannade system, då möjligheterna egentligen är nästan obegränsade belyses endast ett fåtal.
Genom att tillföra obemannade system ökar ubåtsvapnets potentiella opera-tionsområde och höjer därigenom dess operativa effekt.
3.3.1 Självskydd och verkansområde
Genom att tillföra obemannade system ökar ubåtsvapnets potentiella opera-tionsområde och höjer därigenom dess operativa effekt. En ubåt som opererar tillsammans med en eller flera AUV:er i ett nätverk (figur 5) utökar ubåtens självskydd, spanings- och verkansområde. Det ger i sin tur en potentiellt större stridseffekt för ubåten då den kan upptäcka hot och fiender mycket tidigare än om den opererade ensamt och får då mer tid och större möjligheter för besluts-fattande. En ROV och AUV kan potentiellt användas istället för ett periskop, genom att skicka ett obemannat system upp till ytan medför att ubåten kan stanna och hålla sig mer dold på ett större djup än periskopdjup. På samma sätt kan man skicka obemannade system ner till havsbotten för att inhämta information på ett större djup än vad ubåten kan nå.
Figur 5: Konceptbild på hur en ubåt och AUV:er jobbar i nätverk och kommu-nicerar med varandra.
3.3.2 Framskjutet dolt system
AUV:n kan användas som ett framskjutet dolt system för ubåten. AUV:n kan skickas in på fientligt territorium eller bakom fiendes linjer för inhämtning av data och information såsom; kartläggning av fiendens rörelser, kartläggning av botten och signalspaning, utan att riskera att röja ubåtens position och utan risk för potentiella mänskliga förluster. Efter utfört uppdrag återvänder AUV:n till
moderubåten för att lämna av inhämtad information för senare analys. Beroende på vilken typ av informationsinhämtning det gäller kan AUV:en utrustas med olika nyttolaster inför de olika typerna av uppdrag som till exempel olika sorters kameror, sonarer eller mikrofoner.
3.3.3 Minkrigsföring
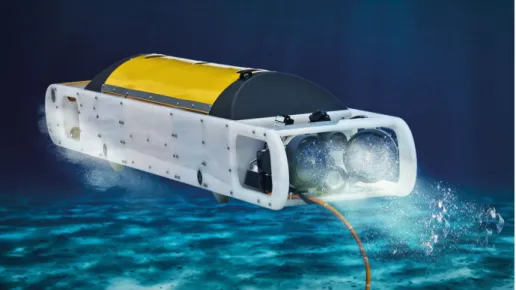
Ett obemannat system kan användas för både offensiv eller defensiv minkrigsfö-ring. En AUV eller ROV kan skickas ut för att studera olika föremål på botten i detalj, informationen kan sen analyseras för att avgöra om det är säkert för ubå-ten att gå in i området som påverkas av föremålet. En AUV kan även utrustas med en sonar för att söka av större areor i syfte att lokalisera och positionera potentiella farliga föremål som minor eller gammal icke exploderad ammunition. Ett obemannat system, såsom Sea Wasp (figur 6), kan också användas för att oskadliggöra potentiella farliga föremål genom att föra med sig och placera ut en sprängladdning i direkt anslutning det potentiella farliga föremålet för att sen detoneras när ubåt och farkost är på säkert avstånd [7]. På liknande sätt kan en AUV föra med sig minor och placera ut på strategiska punkter för att sedan återvända till ubåten. Idag används självgående ubåtsminor som själva positionerar sig i mineringsområdet där stridsdelen av sprängmedel transporte-ras av en torpeddrivdel [8]. När minan detonerar förlorar man drivdelen, genom användning av en AUV slipper man den förlusten.
Figur 6: Saabs Sea Wasp som kan användas för att lokalisera, identifiera och oskadliggöra till exempel minor.
3.3.4 Skenmål och vilseledning
Om en ubåt blir detekterad av fienden i en potentiellt farlig situation så kan den skicka ut ett skenmål som istället drar på sig uppmärksamheten så att ubåten dolt kan manövrera sig bort från det farliga området eller situationen, så kallad avhakning. En AUV som avger akustiska, magnetiska-och elektriska signaturer som efterliknar ubåten kan uppfylla den funktionen. Efter att ubåten manö-vrerat sig bort till säkert område kan AUV:n sluta sända ut sina signaler som vilseleder fienden och återvända till ubåten. På liknande sätt kan en AUV an-vändas för att dra till sig fiendens uppmärksamhet innan ubåten rör sig in i ett område. Det medför att fiendens uppmärksamhet riktas mot AUV:n och den po-tentiella röjnings risken minskar för ubåten så den i bästa fall kan få manövrera odetekterad. Efter avslutat uppdrag återvänder AUV till ubåten.
4
Systems Engineering
Syftet med Systems Engineering är att gå från behov/önskan till ett fungerande system. Att bryta ner ett komplext problem i mindre delar och därifrån jobba mot en lösning. Boken Applied Space System Engineering [9] säger att Systems Engineering är konsten och tekniken att utveckla ett operativt system som mö-ter kraven inom ålagda begränsningar".
Systems Engineerings födelse förknippas oftast med effekterna av andra världs-kriget och senare 50- och 60-talet när de första böckerna publicerades som defi-nierade Systems Engineerings plats som en disciplin i ingenjörskonsten. Under andra världskriget ökade snabbt den tekniska utvecklingen av komplexa system för att få en militär fördel i kriget på båda sidor. Utvecklingen av högpresteran-de flygplan, ubåtar, radar, raketer och atombomben krävhögpresteran-de revolutioneranhögpresteran-de teknik utvecklingar inom många discipliner och de här systemen kombinerade oftast flera olika tekniska discipliner. Även det pressade tidsschemat som var nödvändigt med tanke på omständigheterna som ett krig medför gjorde att nya tillvägagångssätt i planering, teknisk koordination och ingenjörs ledning behöv-des ta fram. System Engineering som det är idag, är utvecklat för att möta de här utmaningarna som uppstod under andra världskriget [10].
Systems Engineering skiljer sig från de vanliga ingenjörs disciplinerna på det sättet att man granskar systemet som en helhet och hur olika delsystem inte-ragerar med varandra och man går sällan ner på djupet på en specifik detalj. Syftet med Systems Engineering är att man i ett tidigt skede av ett projekt bygger rätt system och att systemet är rätt byggt för behov som kunden ställer. Det första stegen i Systems Engineering bygger på att man tidigt i projektet identifiera kundens och intressenters behov genom till exempel genomföra inter-vjuer. Efter att behoven identifieras översätts dessa till förmågor som systemet ska innehålla för fylla de identifierade behoven. När förmågorna är kartlagda
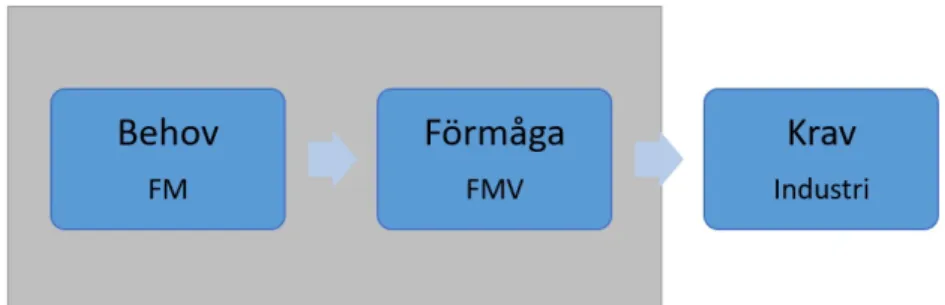
övergår det sedan till industrin som i sin tur skriver tekniska kravspecifikationer på systemet. Utifrån dessa krav går processen vidare i en iterativ process med design framtagning, utveckling och produktion, testning och validering. I det här arbetet har de tidiga faserna inom Systems Engineering (figur 7) applice-rats på en förstudie för framtagande av ett dockningssystem för AUV och ubåt. Systemet i fokus i det här arbetet är ett dockningssystem. Dockningssystem är ett av många delsystem i ubåt A26. Dockningssystemet delas i sin tur in i flera olika delsystem som till exempel system för kommunikation, AUV och system för att fysiskt föra ombord en AUV i en ubåt. Intervjuer har genomförts med intressenter för att identifiera vilka behov som finns och utifrån det har de förmågor som ett dockningssystem bör inneha belysts.
Figur 7: Tidiga stadier inom Systems Engineering, den gråa rutan visar det här arbetets avgränsning.
4.0.1 Informationsinhämtning
Materialet består huvudsakligen av intervjuer med personer i nyckelbefattningar inom FOI, Försvarsmakten och FMV. Utöver detta utnyttjas FOI rapporter och tryckta källor. En del av de tryckta referenserna har enbart utnyttjas för att sätta in författaren i ämnet.
4.1
Intressenter
En intressent är en person, företag eller organisation som har ett intresse i syste-met eller kan bli påverkad av systesyste-met i olika avseenden. Eftersom intressenter har ett intresse i systemets behov, dess uppdrag eller i den operativa förmågan är det viktigt att lyssna på deras behov och krav på systemet [9]. Ett flertal intressenter är inblandade i det här systemet, Försvarsmakten (ubåtsflottiljen), FMV, industrin med flera. Den här rapporten kommer fokusera på de som är
närmast inblandade i framtagning och användande av systemet. Intressenter-na delas in två olika grupper, aktiva och passiva. En intressent kan vara en kombination av aktiv och passiv i det här systemet.
4.2
Aktiva Intressenter
Aktiva intressenter är personer eller organisationer som blir direkt påverkade av systemet när de väl är i bruk, det vill säga för dockning systemet är det främst Försvarsmakten (ubåtsflottiljen) och i förlängningen dess personal. Nedan listas de aktiva intressenterna med en kort beskrivning av deras interaktion, intresse och krav på systemet.
4.2.1 Försvarsmakten (ubåtsflottiljen)
Ubåtsflottiljen kommer vara slutanvändare och nyttja systemet när de är klart. De vill ha ett verksamhetssäkert system som inte riskerar ubåten och dess per-sonal i både röjnings- och olyckssynpunkt.
4.2.2 Operatörer
Operatörerna är de som ombord på ubåt A26 kommer att styra och sköta del-systemet. De vill ha ett enkelt, robust och driftsäkert system. Systemet ska inte ställa för höga personella- och tekniska krav på operatörerna.
4.2.3 Naturliv
Eftersom ubåt A26 och AUV opererar i havet kommer naturliv att påverkas av systemet. Då själva dockingssystemet har en försumbar påverkan på omgivning-en jämfört med ubåtomgivning-en så kommer det inte tas hänsyn till domgivning-en aspektomgivning-en i det här arbetet. Dock värt att nämna är att om ett obemannat system kan operera med A26 som moderfartyg behövs inga ytfartyg för operera det obemannade syste-met. Vilket då har en positiv inverkan på utsläpp och det ekologiska fotavtrycket från marinen.
4.3
Passiva Intressenter
Passiva intressenter är personer och organisationer som är med och påverkar systemet under dess framtagning och produktion. Passiva intressenter kommer inte att påverkas eller använda systemet när det är i operativt bruk men kan än-då sätta många krav och begränsningar på systemet [9]. Nedan listas de passiva intressenterna med en kort förklaring av deras interaktion, intresse och krav på systemet.
4.3.1 Försvarsmakten
Försvarsmakten är beställare av systemet då de också är beställare av A26. Dem förväntar sig att systemet ska vara så tyst som möjligt och anser att obemannade system är framtiden för ubåts krigföring. Dem anser att det möjliggör större operativ bredd för ubåten och informationsinhämtning med låg risk.
4.3.2 FMV
FMV (Försvarets Materielverk) har till uppgift att anskaffa material åt För-svarsmakten, vilket i förlängningen betyder att de kommer vara ansvarig för framtagning av systemet. FMV ser obemannade system som en ny teknik som man inte kan bortse ifrån och är framtiden. Dem förväntar sig att dockning ska ske helt utan risk att röja ubåtens position. Dockningen ska även ske med så lite mänsklig inblandning som möjligt. Dem anser att ett helt autonomt system har en bättre noggrannhet och högre frekvens på uppdatering gällande position och manöver kommandon.
4.3.3 FOI
Totalförsvarets forskningsinstitut (FOI) utför grundforskning på marina under-vattenssystem som är viktigt på många nivåer i arbetet med att ta fram system A26 och dess undersystem. Deras arbete är hemligt, så vidare rapportering av deras påverkan av systemet kommer ej utföras.
4.3.4 Industrin
Tillverkare av systemet utifrån de krav och specifikationer som framställs utifrån de förmågor och önskemål som ställs från deras uppdragsgivare (FMV). Då det här arbetet är avgränsat innan industrin tar vid i utveckligen av systemet så tas inte mer hänsyn till dem i de här arbetet.
5
Dockning
För enkelhetens skull har det här arbetet delat upp ett dockings förfarande i olika zoner och docknings skeden. Även en uppdelning på hård- och mjuk dockning kommer göras för att lättare kunna jämföra olika tekniker och sensorer för de olika behoven som uppstår i en dockning. I det här kapitlet beskrivs de olika zonerna och en förklaring på skillnaden mellan en hård- och mjuk docking ges.
5.1
Mjuk dockning
Vid mjuk dockning menas att AUV:n har en säker och snabb kommunikation med ubåten och manövrerar på ett kort avstånd från ubåten. AUV och ubåt upprättar den här dockningen i infångnings zonen. AUV:n manövrerar framför ubåten med en säker och kontinuerlig tvåvägs kommunikation.
Figur 8: Illustration av en mjuk docking där AUV och ubåt har konstant kom-munikation, illustreras av de två färgade linjerna på bilden.
5.2
Hård dockning
Hård dockning är när AUV:n ligger säkert surrad ombord på ubåten innanför tryckskrovet. När AUV och ubåt genomför en hård docking har AUV och ubåt först tagit en första säker fysisk kontakt med hjälp av ett mekaniskt dockningssy-stem. I de här skedet är det dockningsystemet som sköter dockningsförfarandet medans AUV:en som övergår till ett passivt läge. Efter att en första säker fysisk kontakt har tagits stabiliserar och låser dockingssystemet fast AUV:n ytterliga-re och börjar forsla in AUV:n ombord på ubåten genom FPL:ens yttytterliga-re och inytterliga-re luckor. Inne i FPL:n flyttas AUV och dockningssystem manuellt av ubåtsope-ratörer till dess slutläge för förvaring där dem surras fast och dockningen anses som avslutad.
Figur 9: Illustration av en genomförd hård-docking, där AUV ligger säkert surrad ombord på ubåt.
5.3
Manöverklass och detekterings klasser
I det här arbetet undersöks hur och om en dockning är möjlig i det tre manö-verklasserna en ubåt opererar i; bottenliggande (BL), svävande (SV) och med framfart (FF).
5.3.1 Bottenliggande
En ubåt kan i grunda vatten som inte överstiger dess maximala dyk-kapacitet inta bottenläge. Med det menas att den fysiskt lägger sig på havsbotten. Anled-ningen till det är flertalet, att försvåra detektion för en fiende genom att man kan stänga av motorer och andra system ombord. Det medför att även ubåten blir svårare att detektera mot en omgivande havsbotten i förhållande till i den öppna vattenvolymen med till exempel sonarteknik.
5.3.2 Svävande
Med manöverklass svävande avses att ubåten utan framfart i vertikalt eller ho-risontellt led hovrar likt en helikopter och försöker hålla sig på samma position. Många ubåtsflottor utövar inte detta då medför en potentiell risk för ubåten. En ubåt vill helst gå med framfart för att vid nödläge snabbt kunna inta ytlä-ge. När ubåten har framfart medför det en extra lagrad energi, i det här fallet kinetisk energi, som hjälper den upp till ytan. Då marginalerna för att ta sig till ytläge ibland kan vara små är det inte många ubåtsflottor som tar den ris-ken. Speciellt när de opererar på vatten djupare än ubåtens maximala dykdjup. Svenska ubåtar operar mestadels i Östersjön och grunda vatten där man med större säkerhet kan ta de extra riskerna som svävande medför.
5.3.3 Framfart
Med manöverklass framfart menas att ubåten rör på sig med varierande hastig-het i vattenvolymen i horisontal led. För att förenkla det här arbetet och för att rent praktiskt underlätta vid en dockning dras en slutsats att ubåten i den här manöverklassen inte rör sig i vertikalled i vattenvolymen.
5.3.4 Detekterings Klasser
Utöver de 3 olika manöverklasserna opererar en ubåt under 3 olika detekterings klasser. Med det menas vilken ljudvolym och signatur ubåten ger ifrån sig. De-tekterings klasserna delas in i dold, delvis dold och icke dold. I deDe-tekterings klass dold så görs en slutsats att ubåten minimerar röjningsrisken maximalt och vill sänka sin akustiska signatur till lägsta möjliga. Även antas att ubåten opere-rar i den här detektions klassen när risk för röjning är stor eller man opereopere-rar
bakom fiendens linjer. I detektions klass delvis dold antas ubåten operera med en högre akustiskt signatur än vid detektion klass dold då risken för röjnings anses vara mindre vilket till exempel kan bero på dess geografiska position till en potentiell fiende. Med detektions klass icke dold anses ubåten inte ta hänsyn till röjningsrisk eller bedömer risken för röjning som låg eller försumbar.
5.4
Zon Indelning
Vid ett dockningsförfarande kommer det här arbetet dela in dockningen i olika zoner som baseras på det avstånd och position som en AUV har relativt ubåten. I vilket skede av dockningen sekvensen en AUV och ubåt befinner sig i kommer definieras av de här zonerna. Syftet är att underlätta analys och jämförelse av olika kommunikationstekniker samt att sätta en avgränsning på arbetet i den här rapporten. Avstånd som nämnas i de här kapitlet är bara estimat för att underlätta förståelsen för läsaren.
5.4.1 Fjärrzon
Fjärrzon, vitt område i (figur 10), är när AUV och ubåt befinner sig på ett så pass stort avstånd relativt varandra så att kommunikation dem emellan potentiellt är problematiskt eller helt utom räckhåll. En kommunikation i det här området uppfyller inte heller någon funktion eller syfte då ubåt och AUV opererar som två separata enheter. Det kan uppstå när en AUV är ute på ett spaningsuppdrag eller opererar på fientligt territorium. Här kan avståndet uppgå till flertalet kilometer.
5.4.2 Inkallningszon
Inkallingszon, blått område i (figur 10), är zonen då ubåt och AUV först upp-rättar kontakt med varandra. Det kan vara att ubåten skickar ett meddelande för att kalla hem en AUV eller en första handskakning för att bestämma deras relativa position för kunna fastställa vidare navigering för en rendezvous. I den här zonen bedöms kommunikationen vara begränsad till endast ett fåtal med-delanden och enkelriktad. Avståndet kan potentiellt vara mindre än i fjärrzonen men uppgår ändå till flertalet kilometer.
5.4.3 Rendezvouszon
Rendezvouszon, lila område i (figur 10), är zonen då ubåt och AUV samman-strålar på samma geografiska position. Här har avståndet minskat till hundra eller tiotals meter och behovet av kommunikation har ökat då AUV och ubåt måste börja navigera relativt varandra i större utsträckning för att undvika kol-lision och positionera sig rätt inför ett mer kritiskt steg i dockningssekvensen.
Kommunikationen övergår från enkelriktad till att bli dubbelriktad för att med större säkerhet bestämma den relativa positionen.
5.4.4 Dockningszon
Dockningzonen, grönt område i (figur 10), är när avståndet mellan AUV och ubåt övergår till tiotal meter. Kommunikation ökar då den relativa positionen till varandra blir viktigare och måste bestämmas mer exakt då risken för kollision ökar nämnvärt. I det här skedet är det första gången AUV:en måste navigera sig relativt ubåten och har vissa zoner runt ubåten den måste undvika. I de här skedet bör ubåten ha en konstant kurs och fart om den befinner sig i manöverläge framfart och all större manövrering står AUV:en för.
5.4.5 Infångningszon
Infångningszon, gult område i (figur 10). I den här zonen har AUV:n positio-nerat sig framför ubåten och manövrerar för att ta fysik kontakt med ubåten. Kommunikationen mellan ubåt och AUV bör vara konstant och AUV:n mås-te konstant korrigera sin position efmås-ter ubåmås-ten. Risken för felmanövrering och kollision är i det här skedet av dockningen stor.
5.4.6 Ombordtagningszon
Ombordtagninszon, rött område i bilden (figur 10). Fysiskt kontakt mellan ubåt och AUV bör vara konstant och processen med att fysiskt föra AUV ombord på ubåten pågår (hård docking). Ett behov av kommunikation bör inte finns mer än optisk övervakning av processen för att säkerställa att inget fel inträffar.
Figur 10: Zonindelning av dockningförfarande. Grått område = Fjärrzon. Blått område = Inkallsningszon. Lila område = Rendezvouszon. Grönt område = Dockningszon. Gult område = Infångingszon. Rött område = Ombordtagnings-zon.
6
Undervattenskommunikation
Undervattenskommunikation är svår och vissa fall komplicerad då mediet som de rör sig om är vatten. Det finns 3 primära tekniker för undervattenskom-munikation; akustisk, optisk och magnetisk. I de här kapitlet ges en inledande beskrivning av de olika teknikerna samt vilka för- och nackdelar det har.
6.1
Akustik
Akustisk kommunikation är det som vanligtvis och mest frekvent använts för un-dervattenskommunikation idag. Med lågfrekventa (LF) signaler med stor energi och våglängd kan man kommunicera över stora avstånd. Med den tekniken kan man även kommunicera från land ner i vatten, det görs med stora antenner med hög effekt. Men en låg frekvens medför också att man inte kan överföra några större datamängder utan är begränsad till korta meddelanden på några få datatecken. Med lågfrekvent akustisk kommunikation är också risken för röj-ning av egen ubåt stor, om ubåten är den som sänder ut signalen. Den mesta signalspaning som utförs är just akustisk. Med högfrekvent (HF) akustiskt kom-munikation kan man överföra större datamängder men med kortare räckvidd. En kortare räckvidd medför också en mindre röjningsrisk men jämfört de and-ra kommunikations teknikerna som finns så har akustisk kommunikation den största röjningsrisken.
6.2
Sikt i vatten
Sikt ner i och under vattnet har en stark korrelation till hur mycket partiklar och upplöst materia av olika sorter det finns i vattnet. Partiklarna kan bestå av skräp, upplösta mineraler, bakterier och plankton. Hur långt ljus färdas i vatten beror på dess dämpning. Två faktorer som avgör hur stor dämpningen är av ljus i vatten är spridning och absorption. Absorption beror på att ljusets fotoner absorberas av vattnets atomer, energin från fotoner omvandlas till slut till värme. Spridning beror på att brytningsindex ändras och ljuset byter riktning för att det kolliderar med partiklar i vattnet [11]. En annan faktor som begränsar siktsträckan är bakåt reflektion av ljus från partiklar mellan betraktaren och det objekt man vill observera. Vattenförhållanden och mängden partiklar i vattnet varierar över årstiderna där man rent generellt kan säga att under vinterhalvåret är de bättre vattenförhållande under sommarhalvåret.
6.3
Optisk siktsträcka i Östersjön
Vattenmiljön i och runt om Sverige både i Östersjön och på västkusten är ofta grumlig och fyllt med partiklar. Detta begränsar starkt siktsträckan i vattnet som tidigare nämnts. En studie har genomförts av FOI [12] där effekterna på
vattenförhållanden i Östersjön på grund av årstid studerats. Från grafen i figur 5 kan man utläsa att bäst siktsträcka i Östersjön är som bäst under vintermå-naderna. I grafen visas mätningar utförda med en secchi disk samt med satellit. Mätningarna med en secchi disk är utförda både i kustnära vatten och på öp-pet hav vilket gör datan mer generell för Östersjön, mätningarna är också mer exakta än de som utfördes med satellit. Det framgår om man kollar på det bästa och sämsta uppmätta värdet med en secchi disk så varierar siktsträckan från som bäst arton meter ner till cirka två meter som sämst. Medelvärdet för mätningarna över hela året ligger runt åtta meter. I examensarbetet av Magnus Johnsson[11] har en studie genomförts där man undersöker siktsträckan för laser för just att leda in en autonom farkost. Magnus resultat visar på att siktsträc-kan med laser är på runt 15 meter under dåliga förhållanden men uppskattar att under bra förhållanden kan siktsträckan uppgå till 40 meter.
6.4
Optiska tekniker
Ett optiskt system har inte lika lång räckvidd som ett akustisk system och är mycket bättre ur ett röjningspersketiv av samma anledning, då en fiende måste vara så nära så de kan detektera ljuskällorna. Räckvidden för optiska system är starkt korrelerad med de vattenförhållanden i vilket systemet används. Siktsträckan vilket beskrivits i tidigare kapitel är den dimensionerande faktorn man måste ta hänsyn till vid val av vilket optiskt system man ska använda och i vilka skeden av dockningen det är lämpligt att använda. Det finns flera tekniker som potentiellt kan öka siktsträckan, några av de tekniker som finns idag beskrivs vidare mer ingående i det här kapitlet. Det finns även flera olika andra sätt att öka siktsträckan än tekniska system. Val av våglängd har en inverkan på hur lång siktsträckan blir för ljus under vatten, blått till grönt ljus är att föredra, generrelt en våglängd mer mot grönt i Östersjön [13]. Även att öka energin i ljuskällan ger upphov till större siktsträcka. Forskning på det här området finns och för vidare läsning [11]. Ett optiskt system ger också kombinationsmöjligheter av förmågor. Förutom kommunikation kan ett optiskt system potentionellt användas för att avbilda föremål, de kan vara till fördel vid inledning av AUV:n men kan även nyttjas av ubåten i andra syften. En annan fördel är att optiska system kan överföra stora mängder data på kort tid med till exempel med laser. Att överföra stora mängder data ska anses som en stor fördel för optiska system då den egenskapen är önskvärd i vissa faser av dockningen.
6.4.1 LIDAR
LIDAR (Light detection and ranging) är en laserteknik som idag används för avståndsmätning och 3D-avbildning. Tekniken kan liknas vid radarteknik där en laserpuls sänds ut och en sensor mäter reflektionstiden för ljuset från objektet som studeras. Idag utförs forskning av FOI på LIDAR för undervattensbruk [12]
för att bland annat användas för bottenkartering och objektidentifiering. Det finns flera företag i sverige som säljer den här typen av teknik som till exemepl Leica HawkEye [14].
6.4.2 Avståndsgrindad avbildning
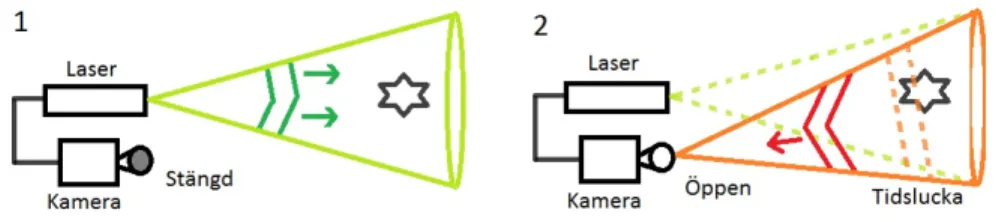
Avståndsgrindad avbildning (Gated Viewing på engelska) är också en lasertek-nik som kan användas för att öka siktsträckan. Systemets funktionen är sådan att en snabb pulsad laser belyser ett område eller objekt, en 2d-kamera monte-rad bredvid lasern öppnar och stänger sin slutare för den tidslucka motsvarande den tid det tar för laserpulsen att färdas till och från objektet . Det medför att endast ljus reflekterat från objektet som valts att observeras registreras av kameran (figur 11). På så sätt reduceras ljus reflekterat från partiklar i vatten-volymen mellan kamera och objekt. Tekniken medför ungefär dubbel siktsträcka jämfört vanlig kamera med lampa för belysning av objektet [12]. Genom val av tidslucka kan man välja på vilket avstånd från systemet man vill observera. Vid användning av avståndgrindad avbildning vid en docking kan man sekven-tiellt söka av ett område framför ubåten där AUV tros vara positionerad för att potentiellt snabbare upprätta optisk kontakt.
Figur 11: Konceptskiss, avståndsgrindad avbildning.
6.5
Magnetism
Ett tredje alternativ för undervattenskommunikation är magnetiskt kommuni-kation. Magnetiskt kommunikation har kortare räckvidd än akustisk kommu-nikation men längre än optisk. Ur röjningssynpunkt är den också potentiellt bättre än akustisk då inte lika mycket signalspaning av fienden begås på den tekniken. Ett magnetiskt kommunikationssystem är dock inte att föredra som kommunikationsalternativ för ett dockningssystem, en orsak är att ubåten själv skulle utgöra en för stor störningskälla för kommunikationen. Ubåten själv har också en specifik magnetisk signatur som man inte vill ändra eller förstöra vilket ett magnetiskt kommunikationssystem potentiellt skulle göra. Magnetisk kom-munikation har därför bedömts som ett olämpligt komkom-munikationssystem och kommer inte behandlas något mer i detta arbete.
7
Systemanalys
7.1
Beskrivning av sensorutvärdering
I det här kapitlet granskas tre olika sensorer för var och en av docking zonerna som behandlas i det här arbetet. Målet med granskningen är att kunna avgöra vilken sensor med en viss förmåga som passar bäst i vilken zon och i vilket ske-de av dockningen. I jämförelsen av ske-de tre olika sensorerna så har två akustiska sensorer, både högfrekvent och lågfrekvent, samt en optisk sensor valts. Värt att notera är att det inte är tre specifika sensorer som jämförs utan teknik förmågan som en sådan sensor innehar. En matris har utformats för att lättare visualise-ra gvisualise-ranskningen. De tre sensorerna ställs mot fyvisualise-ra stycken kriterier, räckvidd, datamängd, positionering och direktionalitet. En färgkodning visar hur väl sen-sorn möter den förmåga som krävs för att tillgodose vart och ett av de fyra kriterierna och ett kryss markerar den sensorn som anses bäst. Färgkodningen i matriserna är följande:
Grön= Mycket Lämplig Gul= Lämplig
Röd= Ej Lämplig
Nämnas ska även att en sensor kan uppfylla behovet för ett kriterium i en viss zon eller skede men att dess förmåga är större än vad behovet är och kommer då följaktligen färgkodas som röd eller gul.
Det fyra olika kriterierna definieras nedan.
Räckvidd: Sensorns förmåga att sända och ta emot signaler för att kunna kommunicera över den distans som krävs.
Datamängd: Sensorns förmåga att överföra den mängd data som krävs för uppfylla behovet av kommunikation i det specifika dockning skedet.
Positionering: Sensorns förmåga att bestämma relativa positionen och attityd mellan ubåt och AUV med hänsyn till noggrannhet.
Direktionalitet: Sensorns spridningsförmåga att sända och ta emot signaler. Med hög direktionalitet menas att sensorn skickar och tar emot signaler i snäv sektor.
7.2
Beskrivning av riskanalys
I det här kapitlet presenteras en riskanalys av docking systemet, vilka risker som finns i de olika skedena av docking belyses. En jämförelse görs också på de olika säkerhetsriskerna i de olika manöverklasserna. En riskmatris används för att kartlägga och bedöma de olika riskerna där sannolikhet och konsekvens presenteras med hjälp av matrisen. Med röjningsrisk tas bara hänsyn till själva
dockningssystemets potentiella risk att röja ubåt och AUV, inte deras respek-tive risk för röjning på grund av andra system som finns ombord på AUV och ubåt som till exempel framdrivning. Kollisionsrisken har analyserats utifrån de tre manöverklasserna framfart (KFF), svävande (KSV) och bottenliggande (KBL). Röjningsrisk för AUV benämns RR-AUV och RR-Ubåt för röjningsrisk för ubåt.
7.3
Rendezvouszon
7.3.1 Utvärdering sensorer
Teknik Räckvidd Datamängd Positionering Direktionalitet Akustisk (HF)
Akustisk (LF) x x x x
Optisk
Tabell 1: Utvärderingsmatris för sensorsystem i Rendezvouszon. Slutsats utvärdering sensorer
I Rendezvouszonen bedöms en sensor av typen akustisk och lågfrekvent bäst möta de behoven som finns. Den har längst räckvidd och har en låg direktiona-litet vilket behövs för en säker kommunikation i den här zonen. Vidare anses att den mängd data som behöver överföras för navigering vara inom den gräns för vad lågfrekvent akustisk kommunikation kan hantera. Vikten av positionering är inte kritisk då avstånden de rör sig om inte utgör en större risk för kollision mellan ubåt och AUV.
7.3.2 Risksanalys
Riskanalys för Rendezvouszon. Riskerna som belyses i den här zonen är röj-ningsrisk för docking systemet på ubåt och AUV samt kollision för de tre olika manöverklasserna för ubåten. Röjningsrisken utgår från den sensorn som har valts som bäst i utvärderingen.
Konsekvens
Sannolikhet Obetydlig Mindre Måttlig Större Kritisk
Mycket Låg KBL KSV KFF
Låg RR-AUV
Medelhög RR-Ubåt
Hög Mycket Hög
Kollisionsrisken i den här zonen bedöms som mycket låg på grund av det relativa avståndet mellan AUV och ubåt. Vidare anses konsekvenserna vid en kollision vid manöverklass bottenliggande vara minst allvarlig och en kollision vid ma-növerklass framfart anses ha störst konsekvenser. En kollision när ubåten ligger på botten bör potentiellt inte skada ubåten i någon större utsträckning om den inte träffar ett mer ömtåligt område på ubåten som till exempel propeller, roder eller master. En AUV kan dock potentiellt ta skada vid av en kollision och kan efter en första kollision med ubåt även kollidera med havsbotten. Vid manöver-mode svävande bedöms riskerna för skada som likartad de vid bottenliggande, skulle ubåten dock ta skada av en kollision så anses det ha större konsekvenser vid svävande än vid bottenliggande. Vid manövermode framfart anses konse-kvenserna av en kollision som störst på grund av att ubåten har framdrift och propellern roterar. En kollision mellan AUV och en roterande propeller skulle potentiellt kunna skada både propeller och AUV i en större grad. Röjningsrisk för ubåt anses högre än för AUV i den här zonen då AUV potentiellt inte be-höver sända några signaler utan mer lyssna efter signaler från ubåten och sen manövrera utifrån dem. Konsekvensen anses dock högre om ubåten röjer sig än AUV och detektion av ubåten kommer i det här arbetet alltid anses som kritisk. Att konsekvensen anses som lägre för detektion av AUV beror på att om AUV:n detekterad så är de relativa avståndet mellan AUV och ubåt så stort att ubåtens risk för detektion inte ökar.
7.4
Dockningszon
7.4.1 Utvärdering sensorer
Teknik Räckvidd Datamängd Positionering Direktionalitet
Akustisk (HF) x x x
Akustisk (LF)
Optisk x
Tabell 3: Utvärderingsmatris för sensorer i Dockningszon. Slutsats utvärdering sensorer
I Dockningszonen bedöms en sensor av typen akustisk och högfrekvent bäst möta de behoven som finns. Räckvidden för en sådan sensor bedöms möta de behov som finns, behovet av lång räckvidd som en lågfrekvent akustisk sensor erbjuder anses inte behövas. En optisk sensor anses här ligga på gränsen för vad den kan hantera.
Den datamängd som behöver överföras är här större och en optisk sensor anses bäst bemöta det behovet, en akustisk högfrekvent sensor möter potentiellt också det behovet. Behovet av att noggrant kunna fastställa positionen i den här zonen anses mötas bäst av en antingen en akustisk högfrekvent sensor eller en optisk sensor. Även i den här zonen finns ett behov av en god direktionalitet vilket
både en högfrekvent och lågfrekvent akustisk sensor uppfyller. En optisk sensor anses här ha för hög direktionalitet.
7.4.2 Risksanalys
Riskanalys för Dockningszon. Riskerna som belyses i den här zonen är röjnings-risk för docking systemet på ubåt och AUV samt kollision för de tre olika ma-növerklasserna för ubåten. Röjningsrisken utgår från den sensor som har valts som bäst i utvärderingen.
Konsekvens
Sannolikhet Obetydlig Mindre Måttlig Större Kritisk Mycket Låg
Låg RR-Ubåt
Medelhög KBL KSV
Hög RR-AUV KFF
Mycket hög
Tabell 4: Riskmatris för säkerhetsanalys i Dockningszon.
Kollisions risken i den här zonen bedöms som högre på grund av det relativa avståndet mellan AUV och ubåt har minskat från föregående zon. Kollisions-risken vid manövermode framfart anses dock ha ökat mer än vid de två andra manöverklasserna. Vidare anses konsekvenserna av en kollision vara samma som i föregående zon. Röjningsrisk för ubåt anses ha minskat i det den här zonen då kommunikationen har gått från lågfrekvent till högfrekvent om man ser till val av sensor. För AUV anses röjningsrisken ha ökat då den potentiellt börjat kommunicera mer, jämfört med att ha varit mer passiv i föregående zon.
7.5
Infångningszon
7.5.1 Utvärdering sensorer
Teknik Räckvidd Datamängd Positionering Direktionalitet Akustisk (HF)
Akustisk (LF)
Optisk x x x x
Slutsats utvärdering sensorer
I infångningszonen där en mjuk dockning följt av en första fysisk kontakt sker är behovet av noggrannhet på manövrering från AUV stor, därav anses att ett optiskt system bäst möta de behoven. Datamängden som ska överföras är som störst under en mjuk dockning och manövrering in till den fysiska kontakten. En optisk sensor är den av de tre sensorerna som kan överföra störst mängd data och är potentiellt mest noggrann för positionering. En optisk sensor har högre direktionalitet än de akustiska men eftersom zonen är mycket mindre och statiskt framför ubåten anses det ändå vara de bästa valet. Räckvidden för en sensor är inte en dimensionerande faktor i den här zonen då distansen mellan ubåt och AUV är liten.
7.5.2 Riskanalys
Riskanalys för Infångningszon. Riskerna som belyses i den här zonen är röj-ningsrisk för docking systemet på ubåt och AUV samt kollision för de tre olika manöverklasserna för ubåten. Röjningsrisken utgår från den sensor som har valts som bäst i utvärderingen.
Konsekvens
Sannolikhet Obetydlig Mindre Måttlig Större Kritisk Mycket Låg
Låg RR-Ubåt
Medelhög RR-AUV
Hög KBL KSV
Mycket Hög KFF
Tabell 6: Riskmatris för säkerhetsanalys i Infångningszon
I Infångningszonen bedöms kollisionsrisken vara stor på grund av att avståndet mellan AUV och ubåt är väldigt liten och en första fysisk kontakt tas. För manö-vermode framfart anses risken för en kollision som mycket hög. Konsekvenserna av en kollision bedöms vara lika som för de andra zonerna men här finns även en risk för kollision med systemet för hård dockning. Röjningsrisken för ubåten bedöms likväl som samma fast den potentiellt bytt från högfrekvent akustisk sensor till optisk sensor, på grund av att systemet för hård docking kan vara en ljudkälla som kan detekteras. Röjningsrisken för AUV bedöms som lägre då den också potentiellt bytt från akustisk till optisk sensor.
8
Systemkoncept för Hård docking
I de här kapitlet kommer två system för hård docking beskrivas och jämföras, för- och nackdelar med systemet kommer belysas. Lastbryggan är ett system där inspiration tagits från Kockums arbete [15]. Det andra systemet är likt många av de lösningar som idag finns för AUV dockning i en stationär station där en AUV navigerar in en tratt för att underlätta infångningen.
8.1
Lastbryggan
Lastbryggan är ett system som bygger på att en ställning mekanisk förflyttas ut ur ubåten. Ställningen fixeras inne i FPL:en och likt en teleskoparm skjuts ut framför ubåten. Längst ut på ställningen är en vinsch monterad som i sin tur släpper ut en vajer i vilken antingen en ballong eller en vinge är fäst (figur 12) för att tvinga linan att röra sig uppåt i vertikalled likt ett flöte. Vid manövermode svävande och bottenliggande skulle en ballong fungera bäst. Vid manöverklass framfart skulle en vinge fungera på liknande sätt. I flötet skulle en sensor vara placerad som AUV manövrerar sig emot.
Figur 12: Konceptbild på systemet lastbryggan för hård docking. Tanken är att en gripklo som monterats på AUV ska kunna gripa tag i linan. Efter att AUV har gripit fast i linan börjar vinschen rullas in och AUV förs ner mot ställning. I ställningen säkras AUV av en mekanism som som sedan lägger ner AUV till ett horisontellt läge på ställningen. Efter att AUV:n säkrats i ställningen transporteras den tillsammans med ställningen tillbaka in i FPL:en med hjälp av teleskop anordningen.
8.1.1 Fördelar och nackdelar
Nedan listas fördelar och nackdelar med systemet lastbryggan. Fördelar
• Fungerar för alla manövermodes.
• Den första fysiska kontakten mellan AUV och ubåt blir planskild och en bit ifrån ubåten vilket då minskar risken för en kollision.
• Rörelseenergin från AUV fångas upp av linan och flötet istället för i eller i nära anslutning till ubåten. Det momentet är en risk när de kommer till röjningsrisk då en alltför snabb inbromsning av AUV potentiellt skulle kunna ge ifrån sig ljud.
• AUV säkras utanför ubåten vilket medför minskad risk att den rör på sig när den forslas in i ubåten.
• Är potentiellt storleksmässigt mindre än andra system.
• Systemet är omnidirektionell för AUV:ns inflygning och för första fysiska kontakten.
• Potentiellt bra för upprepade docknings försök. AUV behöver bara förhålla sig till flötet och inte hela ubåten.
Nackdelar
• Komplicerat system med många rörliga delar.
• En vajer kan vara ett svårkontrollerat system, finns risk att den fastnar i andra delar av ubåten.
• Ställer stort krav på AUV:ns förmåga att positionsbestämning.
• AUV kan fastna i någon del av systemet och en sådan misslyckad docking skulle medföra att dykare måste användas för att lösa problemet.
• Litet mål för AUV att träffa vid inflygning.
• Att inte fullt kunna förflytta hela systemet tillbaka in i ubåten skulle innebära att FPL:en inte kan stängas och låsas.
8.2
Tratt
Systemet Tratt är lik den lösning som det forskas mycket på idag (ref) för dock-ning av en AUV. Systemet bygger på att AUV utför en inflygdock-ning in i en tratt försedd med sensorer som hjälper den manövrera. Tratten i sig självt är byggd i ett mjukt material som absorberar rörelsenergin och reducerar risken för att sy-stemet ger ifrån sig ljud vid en fysisk kontakt mellan AUV och tratten. Tratten skulle vara fäst på en liknande teleskop anordning som lastbryggan och skjutas
ut ur och framför ubåten där tratten expanderas (figur 12). Efter inflygning säkras AUV i tratten och systemet förs åter tillbaka in i FPL:en.
Figur 13: Konceptbild på systemet tratt för hård docking. 8.2.1 Fördelar och nackdelar
Nedan listas fördelar och nackdelar med systemet Tratt. Fördelar
• Fungerar för alla manövermodes. • Enkelt system med få rörliga delar. • Baseras på teknik som redan finns idag.
• Potentiellt snabbare än Lastbryggan då det är färre steg i utförandet av hård dockning.
• Stort mål för AUV att träffa vid inflygning. • Potentiellt ett tystare system än Lastbryggan. Nackdelar
• En första fysisk kontakt kan bara ske från en riktning till ubåten. • Stor risk för kollision vid en fel manövrering då den första fysiska kontakten
tas i absolut närhet av ubåt.
• Bäst lämpad för torpedformad AUV.
• Att inte fullt kunna förflytta hela systemet tillbaka in i ubåten skulle innebära att FPL:en inte kan stängas och låsas.
9
Diskussion och slutsats
Att docka en AUV med en ubåt visar sig vara ett komplext problem med många olika faktorer att ta hänsyn till. Att en docking skulle ske medans ubåten rör på sig förefaller sig vara både svårt och riskfyllt med den teknik som finns idag och bör därför undvikas. Risken för kollision är stor och de krav de ställer på systemen är stora. Vid dockning när ubåten rör på sig blir det en ström bildning runt och framför ubåten, det problemet har inte angripits i den här rapporten och vidare forskning på det områdes bör utföras. Idag bedrivs till stor del forskningen av AUV dockning på stationära mål. Det tyder på att docka en AUV med en ubåt helst bör utföras när ubåten ligger i bottenläge. Kommunikationen i systemet bör till stor del ske med akustisk kommunikation förutom de allra sista stegen i dockningen där optiska sensorer tillsammans med vanlig laser bör klara av uppgiften. Att använda sig optiska tekniker som lidar och avståndsgrindad avbildning kan öka siktsträckan men som tidigare arbeten har visat så bör siktsträckan vara tillräcklig med vanlig laser och kamera. Vid avståndsgrindad avbildning och med lidar så tillkommer även en tidsaspekt eftersom båda systemen kräver en processtid för bildhantering vilket kan göra systemet för långsamt för den frekvens av manövrering AUV behöver utföra. De systemen är idag också dyra och storlekskrävande. Att utrusta en AUV med sådan utrustning skulle potentiellt bidra till en för stor energiförbrukning för AUV:n och en tidsfördröjning i systemet för att vara användbart. Däremot skulle ubåts monterad lidar teknik vara behjälplig för ubåten att läsa av havsbotten innan den ska inta bottenläge före en dockning. Ett system med flera laserkällor monterade på ubåten som en AUV optiskt läser av med en vanlig kamera anses vara det system som är bäst lämpad för manövrera en AUV in i ett slutskede av dockningen. Däremot kan högfrekvent akustisk kommunikation användas ifall det optiska systemet skulle fallera eller användas i kombination med optisk för att få bäst resultat.
Om man sedan kollar på när en dockning bör ske utifrån det tre olika detek-terings klasserna så bör en dockning helst ske när ubåten opererar under icke dold dekteteringsklass. Att ta fram ett system som inte skulle öka röjningsris-ken anses som svårt, till exempel så finns det idag inte en AUV som möter den förmågan. Det kan diskuteras om inte vidare forskning bör göras på framtag-ning av en AUV som är designad för just en dockframtag-ning med ubåt, där krav på manöverbarhet och ljudnivå står i fokus.
För systemet Lastbryggan kan de diskuteras om inte ett sänke som gör att vajern sjunker nedanför ubåten och således att den fysiska kontakten tas under ubåten i vertikalled. Det bör reducera risken för kollision med manövertorn på ubåt. Mer undersökning bör göras på i vilket position relativt ubåten en dockning är mest lämpad.
Det bör även diskuteras om dockning av AUV på en ubåt är något som bör genomföras. Uthålligheten för AUV:er växer och de kommer kunna färdas längre sträckor utan att behöva fylla på energi. Ett system där en AUV har ett ytfartyg som moderskepp och bara manövrerar upp jämsides ubåten för att överföra information, med till exempel ett optiskt system kan ses som ett bättre och mycket mindre riskfyllt alternativ.
Referenser
[1] Saab. Ubåt typ A26. url: https://www.fmv.se/sv/Projekt/Ubat-typ-A26/. (läst: 10.11.2018).
[2] Robert Fedor. Simulation of a Launch and Recovery of an UUV ta an Submarine. 2009.
[3] Anand Sundaresen. Docking of an Underwater Vehicle. 2016. [4] P. Bull et al. Förstudie obemannade farkoster. 2012.
[5] Saab. Ubåt typ A26. url: https : / / saabgroup . com / media / news press / news / 2011 12 / sapphires assisting in civil search -operations/. (läst: 10.11.2018).
[6] Saab. Ubåt typ A26. url: https : / / saab . com / naval / underwater -systems/remotely-operated-vehicles/subrov/. (läst: 10.11.2018). [7] Saab. Seawasp. url: https://saab.com/naval/underwater-systems/
mine-warfare-systems/sea_wasp/. (läst: 10.11.2018).
[8] Carl Gustav Franzén. Svenska sjöminor under 200 år: En sammanställ-ning över två sekel. 2003.
[9] W. Larson et al. Applied Space Systems Engineering. Space Technology Series. McGraw Hill, 2009.
[10] A. Kossiakoff et al. Systems Engineering, Principles and Practice. Space Technology Series. John Wiley och Sons, 2011.
[11] Magnus Johnsson. Optisk inledningsystem med absolut orientering, för un-dervattensbruk. 2001.
[12] M. Henriksson et al. Laserbaserad 3d-avbildning under vatten. 2017. [13] Kort om undervattenskommunikation.
[14] Leica Geosystems. HawkEye. url: https://leica- geosystems.com/ sv - SE / products / airborne - systems / bathymetric - lidar - sensors / leica-hawkeye. (läst: 10.11.2018).
[15] Kockums AB. Studie av Dockningsprinciper för autonoma undervattens-farkoster. 2001.