V¨
aster˚
as, Sverige
Examensarbete f¨
or h¨
ogskoleingenj¨
orsexamen i n¨
atverksteknik
15,0 hp
UTVECKLING AV KOMBINERAD
DATAKOMMUNIKATION OCH TWO
WAY RANGING F ¨
OR IEEE 802.15.4
ULTRAWIDEBANDSYSTEM
David Pantzar
dpr16001@student.mdh.se
Antti Westermark
awk16003@student.mdh.se
Examinator:
Mikael Ekstr¨
om
M¨
alardalens H¨
ogskola, V¨
aster˚
as, Sverige
Handledare:
Martin Ekstr¨
om och Henrik Falk
M¨
alardalens H¨
ogskola, V¨
aster˚
as, Sverige
Sammandrag
Tr˚adl¨os kommunikation mellan noder sker genom att skicka data ¨over det tr˚adl¨osa mediet, f¨or att f˚a kommunikationen att samspela har flertalet standarder utvecklats. En av dessa standarder ¨ar 802.15.4 med UWB PHY vars utformning ¨ar av en s˚adan karakt¨ar att signal¨overf¨oringen blir st¨orningst˚alig och osynlig f¨or andra standarder. UWB anv¨ands ofta till lokalisering och positione-ring, men kan ¨aven anv¨andas till en samtida data¨overf¨oring d˚a standardens utformning till˚ater det-ta. Det var dock oklart med vilken prestanda detta kunde genomf¨oras. D¨arf¨or har den datakommuni-kationsprestandan unders¨oks. Den hypotes som f¨oljdes under arbetet var att ”genom att skicka data mellan positioneringsimpulserna m¨ojligg¨ors anv¨andandet av samma enhet f¨or positionering och
da-takommunikation, systemets prestanda p˚averkas d˚a av MAC-metoden”. Ur hypotesen kom det tre
fr˚agest¨allningar: Vilken MAC-metod ¨ar l¨amplig f¨or b˚ade positionering och data¨overf¨oring? ¨Ar det m¨ojligt att anv¨anda systemet f¨or b˚ade positionering och data¨overf¨oring genom att skicka data mel-lan positioneringsimpulserna? Vilken kommunikationsprestanda kan uppn˚as n¨ar systemet anv¨ands f¨or b˚ade postionering och data¨overf¨oring? I arbetet bevisas hypotesen samt fr˚agest¨allningarna med syftet att detta kunde komma att hj¨alpa till inom exempelvis robotiken, men ¨aven som ett alter-nativ till WiFi d˚a UWB ¨ar b˚ade st¨orningst˚aligt och osynligt f¨or andra standarder. Den iterativa metoden anv¨andes f¨or att utveckla ett system som kunde l¨osa den kombinerade positioneringen och datakommunikationen. I prestandatesterna gick det att utl¨asa att hypotesen st¨amde f¨orutsatt att parametrarna ¨ar korrekt.
Abstract
Wireless communication between nodes is achieved by sending data over the wireless medium. In order to have communications interact different standards have been developed. One such standard is 802.15.4 with UWB PHY, designed such that the signal transmission becomes interference-resistant and invisible to other standards. UWB is often used for location and positioning, but the standard design also allows for a contemporary data transfer. However, it was unclear with what performance this could be implemented. Therefore, the data communication performance has been investigated. The hypothesis that was followed during the work posits that ”by sending data between the positioning pulses, the use of the same unit for positioning and data communication is made possible, and that the system’s performance is then affected by the MAC method.” Three questions arose from this hypothesis. Which MAC method is suitable for both positioning and data transfer? Is it possible to use the system for both positioning and data transmission by sending data between the positioning pulses? What communication performance can be achieved when the system is used for both positioning and data transfer? In this work the hypothesis and the research questions are verified with the intended purpose that it could be of help in the field of robotics and also as an alternative to WiFi, due to UWBs robustness and invisibility characteristics. An iterative process has been utilized throughout this work to build a system which could solve the combined positioning and data communication. In the following performance tests the hypothesis is verified, provided that the parameters used are correct.
F¨
orord
Vi skulle vilja tacka alla de personer som m¨ojliggjort detta arbete. Framf¨or allt v˚ara handledare vid M¨alardalens H¨ogskola, Martin Ekstr¨om och Henrik Falk, som st¨ottat oss genom hela arbetet. Ett stort tack till Joakim Ryd´en, som genom sina kontakter och kunskap inom robotik och n¨atverk m¨ojliggjorde detta examensarbete. Vi vill ¨aven tacka v˚ara familjer som funnits d¨ar och st¨ottat oss n¨ar vi beh¨ovt hj¨alp. Till sist vill vi tacka de andra studenterna som tillbringat denna termin i Robotiklabbet.
David Pantzar och Antti Westermark V¨aster˚as, 13 juni 2019
Ordlista
AC Alternating Current.5,8
AoA Angle of Arival.3
API Application Programming Interface.8,15,18,19,26,36,40
CC-CDMA Complementary code-Code Division Multiple Access.13
CDMA Code Division Multiple Access.4,13
CRC Cyclic Redundancy Check.7
CSMA Carrier Sense Multiple Access.5
CSMA/CA Carrier-Sense Multiple Access with Collision Avoidance.13
CSS Chirp Spread Spectrum.2
CSV Comma Separated Values.23
DSSS Direct Sequence Spread Spectrum.2
FCC Federal Communications Commission.12
FDMA Frequency Division Multiple Access.4,14
GDPR General Data Protection Regulation.11
GPIO General Purpose Input Output.15
GPS Global Positioning System.4
IDE Integrated development environment.8,15
IEEE Institute of Electrical and Electronics Engineers.1,2,12,13
IoT Internet of Things.12
LoS Line of Sight.6
MAC Medium Access Control.1,2,4,5,9,12–14,21,35,36,40,41
PAN Personal Area Network.21
PDU Protocol Data Units.7
PER Packet-Error-Rate.1,9,23,34,39
PHY Physical layer.1,2
PN Pseudo Noise.4,5
PNC PicoNet Coordinator.13,35,40
PRF Pulse Repetition Frequency.6,17,18,23,28–30,32,37–39
QoS Quality of Service.13,35
RFID Radio Frequency IDentificators.12
RSS Received Signal Strength.3,42
SHR Synchronization Header.7
SPI Serial Peripheral Interface.15,16
SQN Sequence Number.7,18
TDMA Time Division Multiple Access.4,12–14,35,36,40–42
TDoA Time Difference of Arrival.3,12,14
TH Time Hopping.13
TH-CDMA Time Hopping-Code Division Multiple Access.13
ToA Time of Arrival.3
ToF Time of Flight.3,42
TWR Two-Way Ranging.3,4,9,14,35,36
UART Universal Asynchronous Receiver-Transmitter.15
UCAN Ultra wideband Concepts for Ad hoc Networks.13,35
UWB Ultra wideband.1–3,6,9,11–15,17,20,23,25,27,35,42
WiFi Wireless Fidelity.9,25
Inneh˚
all
1 Inledning 1
2 Bakgrund 2
2.1 Forskningsgrupper . . . 2
2.2 802.15.4 Ultra Wide Band . . . 2
2.3 Positionering . . . 3
2.4 MAC-Metoder . . . 4
2.5 Data¨overf¨oring . . . 5
2.5.1 Propagering och Line-Of-Sight . . . 6
2.5.2 Paketstruktur . . . 7
2.6 H˚ardvara . . . 7
2.6.1 Mikrokontroller . . . 8
2.6.2 S¨andare, Mottagare och Antenner . . . 8
2.6.3 Tr˚adl¨osa Detektorer . . . 8
3 Hypotes 9 4 Problemformulering 9 5 Metod 10 6 Etik och samh¨alleliga aspekter 11 7 Litteraturstudie 12 7.1 Positionering . . . 12
7.2 Krav p˚a MAC-metod . . . 12
7.3 J¨amf¨orelse mellan TDMA och Aloha . . . 13
8 Implementering 15 9 Prestandatest 23 10 Resultat 26 10.1 Implementation . . . 26 10.2 Prestandatest . . . 28 11 Diskussion 35 11.1 Litteraturstudie . . . 35 11.2 Implementation . . . 35 11.3 Prestandatest . . . 37 12 Slutsats 40 13 Framtida arbeten 42 Referenser 45 Bilaga A 50 paket mellan positioneringshandskakningarna 46 1.1 6.8 Mb/s . . . 46 1.2 850 kb/s . . . 48 1.3 110 kb/s . . . 51 1.4 Preamble 128 . . . 54 1.5 Preamble 256 . . . 55 1.6 Preamble 512 . . . 57 1.7 Preamble 1024 . . . 58 1.8 Preamble 2048 . . . 60
Bilaga B Ett paket mellan positioneringshandskakningarna 62 2.1 6.8 Mb/s . . . 62 2.2 850 kb/s . . . 64 2.3 110 kb/s . . . 67 2.4 Preamble 128 . . . 70 2.5 Preamble 256 . . . 71 2.6 Preamble 512 . . . 73 2.7 Preamble 1024 . . . 74 2.8 Preamble 2048 . . . 76
Tabeller
1 Kopplingschema f¨or Arduino MKRero och DWM1000 . . . 162 DWM1000 kanalparamterar . . . 17
3 Decawave rekommenderade Datarate & Preamble . . . 17
4 802.15.4 - MAC Message Format . . . 21
5 Frame Control Field - Variabler . . . 21
6 Frame Type Field - V¨arden . . . 22
7 Decawave - Payload Message Format . . . 22
8 Decawave - Frame Type . . . 22
9 Prestandatester - Testade parametrar f¨or kanal 5 . . . 25
10 Implementation 1 - Resultat . . . 26
11 Implementation 3 - Resultat . . . 26
Figurer
1 UWB-impuls i j¨amf¨orelse med brus . . . 2
2 Frekvensgraf av UWB i j¨amf¨orelse med 802.11 . . . 3
3 TWR-Protokollets paketutbyte . . . 4
4 Kanaluppdelade MAC-Metoder . . . 5
5 Periodisk analog och digital signal . . . 5
6 Generisk modell av tr˚adl¨os kommunikation . . . 6
7 Exempelstruktur av en Protocol Data Unit . . . 7
8 MKRZero och DWM1000s logiska design . . . 15
9 DWM1000s logiska design . . . 16
10 UWB Nod & Kopplingschema mellan MKRZero och DWM1000 . . . 16
11 Implementation 1 - Protokollstruktur . . . 18
12 Implementation 1 - Testuppss¨attning . . . 18
13 Implementation 3 - Protokollstruktur . . . 19
14 Implementation 3 - Tagg och Ankares fl¨odesschema . . . 20
15 Implementation 4 - Testuppss¨attning med Sniffer . . . 20
16 802.15.4 MAC frame struktur . . . 21
17 Nod monterad p˚a Gorilla Pod stativ . . . 24
18 Prestandatester - Testupps¨attning . . . 24
19 Prestandatester - Testmilj¨o . . . 25
20 Wireshark - Felrapporterad data . . . 27
21 Wireshark - Felstrukturerade bytes i en 802.15.4 frame . . . 27
22 Wireshark - Paket¨overf¨oring mellan noder . . . 27
23 Wireshark - R¨attstrukturerad 802.15.4 frame . . . 28
24 Wireshark - Decawave TWR inkapsling . . . 28
25 Positioneringsprecision - PRF 64 och 6,8 Mb/s . . . 29 26 Positioneringsprecision - PRF 64 och 110 kb/s . . . 29 27 Positioneringsprecision - PRF 16 och 6,8 Mb/s . . . 30 28 Positioneringsprecision - PRF 16 och 110 kb/s . . . 30 29 Positioneringsfrekvens - PRF 64 MHz och 6,8 Mb/s . . . 30 30 Positioneringsfrekvens - PRF 64 MHz och 110 kb/s . . . 31 31 Positioneringsfrekvens - PRF 16 MHz och 6,8 Mb/s . . . 31 32 Positioneringsfrekvens - PRF 16 MHz och 110 kb/s . . . 31 33 Positioneringsfrekvens - PRF 16 MHz och 110 kb/s . . . 32
34 Datatakt - H¨ogst uppm¨atta datatakten . . . 32
35 Datatakt - L¨angst uppm¨att distans . . . 33
36 Data Roundtrip Latens 6,8 Mb/s . . . 33
37 Data Roundtrip Latens 110 kb/s . . . 33
38 Packet Error Rates - 6,8 Mb/s . . . 34
39 Packet Error Rates - 110 kb/s . . . 34
40 Positioneringsprecision - Mindre ¨an 5% avvikelse . . . 37
41 Positioneringsprecision - Centimeterv¨arden f¨or preamble 2048 . . . 38
42 Positioneringsprecision - Felmarginal efter kalibrering . . . 38
43 Positioneringsfrekvens - runt 10 Hz med preamble 128 . . . 39
1
Inledning
Mycket av den datakommunikation som sker idag ¨ar via det tr˚adl¨osa mediet och har applikatio-ner inom m˚anga omr˚aden. Kommunikationsstandarden best˚ar inte enbart av data¨overf¨oring utan anv¨ands ¨aven inom positionering, lokalisering och avbildning. F¨or att f˚a den tr˚adl¨osa kommunika-tionen att samspela har flertalet standarder utvecklats, en av dessa ¨ar Institute of Electrical and Electronics Engineers (IEEE) 802.15.4 standarden som riktar sig mot n¨atverk med l˚ag datatakt, s˚asom Wireless Personal Area Networks (WPAN) [1]. Ett Physical layer (PHY) som inkluderades i IEEE 802.15.4a standarden ˚ar 2007 var Ultra wideband (UWB), vilket medf¨orde mer st¨orningst˚alig kommunikation. ˚Ar 2011 reviderades 2006 standarden, vilket ¨aven ¨andrade dess namn till
IEEE-standard 802.15.4-2011. IEEE-standaren 802.15.4-2011 UWB har applikationer inom b˚ade
posi-tionering och data¨overf¨oring, och om det vore genomf¨orbart att kombinera dessa skulle det vara anv¨andbart inom exempelvis robotiken [2]. I denna rapport kommer ben¨amningen 802.15.4 syfta p˚a IEEE-standard 802.15.4-2011 om ingen annan f¨orklaring ges.
Persson och Falk [3] har tidigare genomf¨ort enskilda prestandam¨atningar av den
datakommuni-kation och lokalisering som g˚ar att uppn˚a med UWB vid anv¨andning av Decawaves DWM1000
modul. Xu [4] har unders¨okt hur prestandan p˚averkas av olika l¨angder p˚a de inledande symbolerna av varje signal¨overf¨oring med UWB. N¨ar det i denna rapport skrivs om dessa inledande symboler kommer h¨arefter ben¨amningen preamble anv¨andas. Persson [2] har arbetat med tekniken f¨or att ta fram ett system som analyserar m¨anniskors r¨orelsem¨onster.
Tidigare studier har tittat p˚a vilken prestanda som kan uppn˚as med positionering och data¨overf¨oring var f¨or sig. Eftersom b˚ade positionering och data¨overf¨oring anv¨ander 802.15.4 standarden antas det m¨ojligt att kombinera dessa i samma enhet, detta ¨ar n˚agot som Persson n¨amner i sitt arbete [5,2].
Systemprestandan n¨ar positionering och datakommunikation kombineras kommer antagligen att
p˚averkas negativt och Medium Access Control (MAC)-metoden kommer vara en betydande faktor
f¨or vilken prestanda som kan uppn˚as. Detta leder till fr˚agest¨allningarna:
• Vilken MAC-metod ¨ar l¨amplig att anv¨anda f¨or kombinerad positionering och data¨overf¨oring? • ¨Ar det m¨ojligt att anv¨anda systemet f¨or b˚ade positionering och data¨overf¨oring genom att
skicka data mellan positioneringsimpulserna?
• Vilken kommunikationspretanda kan uppn˚as n¨ar systemet anv¨ands f¨or kombinerad positio-nering och data¨overf¨oring?
Syftet med arbetet ¨ar att unders¨oka prestandan n¨ar positionering och data¨overf¨oring kombineras. Det f¨orv¨antade resultatet ¨ar att hitta en MAC-metod som till˚ater positionering och data¨overf¨oring samt att prestandam¨atningarna visar att systemet kan anv¨andas f¨or b˚ade positionering och da-ta¨overf¨oring. Arbetet begr¨ansas till att utveckla ett system best˚aende av tv˚a enheter och pre-standam¨atningarna begr¨ansas till att enbart unders¨oka datatakt, Packet-Error-Rate (PER), data roundtrip latens, positioneringsfrekvens samt positioneringsprecision. Studiens resultat visar p˚a att data¨overf¨oring och postionering g˚ar att utf¨ora och de parametrar som anv¨ands spelar roll p˚a systemets prestanda.
Arbetet b¨orjar med en bakgrund f¨or generell tr˚adl¨os datakommunikation samt 802.15.4 UWB,
d¨arefter g˚a in p˚a en litteraturstudie. D¨arefter f¨oljer en implementationsfas i vilket utveckling av systemets f¨orklaras med tillh¨orande prestandatester och dess resultat. Till sist diskuteras resultaten och slutsatser dras utifr˚an dessa.
2
Bakgrund
Tr˚adl¨os kommunikation mellan noder sker genom att skicka data ¨over det tr˚adl¨osa mediet. Det tr˚adl¨osa mediet ¨ar uppdelat i olika frekvenser som anv¨ands av olika standarder [6, s. 112]. En standard kan innefatta flera olika PHY, till exempel UWB, Direct Sequence Spread Spectrum
(DSSS) och Chirp Spread Spectrum (CSS). N¨ar flera noder delar p˚a mediet sk¨oter MAC-metoden
˚atkomsten till kanalen. 802.15.4 med UWB PHY m¨ojligg¨or positionering av noder med en precision p˚a centimeterniv˚a [7]. F¨or anv¨andning av 802.15.4 UWB kr¨avs kompatibla noder som till exempel
DWM1000 fr˚an Decawave.
2.1
Forskningsgrupper
Diverse forskningsgrupper inom UWB-omr˚adet har fokus p˚a olika aspekter av tekniken. F¨oretaget
TimeDomain ¨ar ledande inom UWB-produktutveckling och har p˚a senare tid blivit integrerade
av Humatics Corporation [8]. De arbetar med att f˚a enkel interaktion mellan m¨anniskor, robotar och infrastruktur via en teknik som kallas microlocation som kan positionera enheter till en niv˚a
p˚a ± 2 cm [9]. En svensk forskningsgrupp ¨ar Radarbolaget vilket startade 2004 med en
UWB-radarteknik som kunde utf¨ora en tredimensionell m¨atning av ugnar inom st˚alindustrin [10]. Detta ledde till ett m¨atsystem d¨ar en operat¨or kunde f¨olja ugnens status. Radarbolaget har fokus p˚a
komplexa m¨atsystem med bredbandsradar inom industrin. En annan grupp ¨ar RISE - Research
Institutes of Sweden, vilka ¨ar delaktiga i flertalet forskningsprojekt [11], de har tillsammans med SICS - Swedish Institute of Computer Science genomf¨ort en f¨orstudie f¨or att hitta och testa olika
narrrow- och wide-bandsystem f¨or lokalisering och kommunikation i gruvor eller andra milj¨oer
d¨ar radiokommunikation ¨ar sv˚ar [12]. I sin unders¨okning hittade de tv˚a kandidater, LOCUS och
Decawave UWB. Bland forskningen p˚a M¨alardalens H¨ogskola inom UWB-omr˚adet ing˚ar bland
annat ”Comparasion of UWB Radar Back-Scattering by the HumanTorso and a Phantom” skrivet av Hozhabri et al [13] d¨ar olika frekvensval beroende p˚a applikation har diskuterats.
2.2
802.15.4 Ultra Wide Band
UWB-tekniken b¨orjade som ett milit¨art forskningsprojekt i slutet av 80-talet [1]. Mellan ˚ar 2004 till 2006 f¨ors¨okte 802.15.3a gruppen standardisera high-speed UWB PHY. Detta misslyckades d˚a
de tv˚a medverkande parterna UWB Forum och WiMediaAlliance inte kunde komma ¨overens i sina
motverkade l¨osningar, vilket stod mellan Orthogonal Frequency-Division Multiplexing och Direct
Sequence UWB [14,15]. UWB PHY inkluderades ˚ar 2007 i 802.15.4 standarden som riktar sig mot n¨atverk med l˚ag datatakt [1]. ˚Ar 2011 genomf¨ordes en revision av 2007 standarden och vilket ¨aven ¨
andrade dess namn till IEEE-standaren 802.15.4-2011 [5]. UWB PHY anv¨ander en signal med l˚ag effekt, stort frekvensband och korta impulser som g¨or att st¨orningar minimeras [6, s. 417]. Den maximala uts¨andningseffekten ¨ar cirka 0,5 mW [16, s. 8]. UWB-signalerna kan liknas vid brus d˚a den agerar n¨ara brusgolvet, detta medf¨or att signalerna ¨ar sv˚aruppt¨ackta och sv˚ara att avlyssna. Figur 1 visar karakt¨aren av en UWB-impuls i j¨amf¨orelse med brus, att notera ¨ar att signalen ses som brus f¨or andra applikationer men f¨or UWB ¨ar den tydligt l¨asbar.
Amplitud
Brusgolv
Tid
Figur 1: Karakt¨aren av UWBs impuls i j¨amf¨orelse med brus, signalen ses som brus f¨or andra applikationer men f¨or UWB ¨ar signalen tydligt l¨asbar. I figuren visas en UWB-impuls amplitud i j¨amf¨orelse med brus ¨over tid. Den topp som kan ses representerar UWB impulsen, ¨ovriga v˚agor ¨ar brus. Den streckade linjen visar uts¨andningseffekten.
De till˚atna frekvenserna i Sverige ¨ar 3,1-4,8 GHz och 6,0-9,0 GHz med en minsta bandbredd p˚a 500 MHz och maximal effektt¨athet p˚a -41,3 dBm/MHz [2]. Figur 2 visar frekvensgraf d¨ar j¨amf¨orelsen
mellan UWB och den mer traditionella 802.11 uts¨andningseffekten.
Utsändningsef fekt Brusgolv -41.3 dBm/MHz 2.4 3.1 5.0 10.6 802.11b UWB 802.11a Frekvens GHz
Figur 2: Visar UWBs uts¨andningseffekt p˚a -41,3 dBm/MHz i j¨amf¨orelse med 802.11a, 802.11b och brus-golvet. Figuren visar ocks˚a hur respektive spektrum p˚a 3,1-10,6 och 2,4 samt 5 GHz f¨orh˚aller sig till uts¨andningsseffekten och varandra.
2.3
Positionering
Positionering med UWB bygger p˚a tv˚a olika metoder, Time of Flight (ToF) och Received Signal
Strength (RSS) [17]. ToF ber¨aknar distans genom att se p˚a den tid som det tar f¨or en signal att f¨ardas mellan tv˚a noder. I RSS anv¨ands ist¨allet styrkan p˚a den mottagna signalen f¨or att ber¨akna en enhets position. Tekniken kan till exempel anv¨andas inom medicin eller idrotten f¨or att kartl¨agga m¨anniskors r¨orelser [2]. De enheter som anv¨ands f¨or att utf¨ora positionering kallas tagg och ankare vilket ¨ar mobila respektive station¨ara enheter som kommunicerar med varandra [18].
Fyra olika ToF baserade positioneringstekniker ¨ar Time Difference of Arrival (TDoA), Two-Way
Ranging (TWR), Angle of Arival (AoA) och Time of Arrival (ToA).
AoA Taggens position ber¨aknas med en samling antenner i olika vinklar. Signalens
infallsvin-kel visar vilken riktning taggen befinner sig i [17].
ToA Taggens position ber¨aknas genom att se p˚a den tid det tar f¨or en signal att f¨ardas mellan s¨andare och mottagare. Denna metod kr¨aver att ankare och taggar har klocksynkroni-sering vilket ¨okar dess komplexitet [17].
TDoA Taggen s¨ander ett meddelande till alla ankare [18]. Ankarnas tid f¨or mottagande av
meddelandet sammanst¨alls och taggens position f¨orh˚allande till ankarna kan ber¨aknas.
TWR En tagg och ankare kommunicerar med varandra genom en handskakning och delar
tidsst¨amplad information f¨or ber¨akning av taggens position. Handskakningen best˚ar av Poll-, Poll Ack- och Range-paket som skickas mellan noderna [2]. Figur 3 visar hur denna hanskakningen ser ut. TWR har l¨agre skalbart d˚a noderna m˚aste k¨anna till varandras adresser f¨or att initiera kommunikation [18].
TAGG ANKARE
Poll
Poll Ack
Range
Range Report
Figur 3: Taggens och ankares utbyte av paket f¨or att utf¨ora TWR. Den v¨anstra sidan st˚ar f¨or en enhet som agerar tagg, den h¨ogra sidan st˚ar f¨or en enhet som agerar ankare. Taggen initierar kommunikationen genom att skicka ett Poll paket till ankare, som svarar med ett Poll Ack. Taggen svarar d˚a med ett Range-paket och f˚ar Range Report tillbaka av ankaret. Sedan b¨orjar paketutbytet om igen.
Arbeten har utf¨orts inom positionering med hj¨alp av TWR, d¨ar till exempel Persson [2] har ar-betat med tekniken f¨or att ta fram ett system som analyserar m¨anniskors r¨orelsem¨onster. Genom positionering registreras personens r¨orelser f¨or att sedan kunna analyseras i medicinskt syfte. Tek-niken kan ocks˚a anv¨andas f¨or positionering p˚a platser d¨ar Global Positioning System (GPS) inte ¨
ar tillg¨anglig, till exempel inomhus.
Persson n¨amner i sitt arbete att det ¨ar m¨ojligt att skicka data mellan positioneringsimpulserna men att positioneringsfrekvensen d˚a skulle bli under 10 Hz [2]. Den prestandaanalys som Persson och Falk har gjort visade att den h¨ogsta positioneringsfrekvensen som kunde uppn˚as med enbart positionering var 40 Hz [3].
2.4
MAC-Metoder
802.15.4 standarden g¨or det m¨ojligt att anv¨anda samma enhet f¨or b˚ade positionering och da-ta¨overf¨oring. F¨or att kunna skicka data med samma enhet m˚aste data¨overf¨oringen ske mellan
positioneringshandskakningarna. Systemets MAC-metod p˚averkar den kommunikationsprestanda
som systemet kan uppn˚a, studier som har genomf¨orts bland annat av Shen et al.[19] samt Gup-ta och Mohaptra [20] har fokuserat p˚a hur olika MAC-metoder p˚averkar data¨overf¨oringssprestanda. MAC-metoder ¨ar olika teknologier f¨or hur enheter f˚ar access till kommunikationsmediet. MAC-metoder kan delas in i tv˚a huvudkategorier, d¨ar en ¨ar centraliserad och den andra distribuerad [19]. Den centraliserade metoden anv¨ander en kontrollenhet som styr ¨over kommunikationen
utef-ter satta parametrar. Exempel p˚a centraliserade MAC-metoder ¨ar Time Division Multiple Access
(TDMA), Frequency Division Multiple Access (FDMA) och Code Division Multiple Access (CD-MA). TDMA delar upp kanalen i tidsluckor, FDMA frekvensuppdelar kanalen och CDMA ger varje ¨
overf¨oring en egen Pseudo Noise (PN)-kod. En visuell representation av dessa MAC-metoder visas
i Figur 4.
Om TDMA anv¨ands delar kontrollenheten upp den tr˚adl¨osa kanalen i tidsluckor som f¨ordelas ut
till de enheter som kommunicerar. En s˚adan metod ¨ar ett exempel p˚a en kanaluppdelad metod
t f c1 c2 c3 c4 c5 (a) TDMA c1 c2 c3 c4 t f (b) FDMA t f c1 c2 c3 PN-kod (c) CDMA
Figur 4: Kanaluppdelade MAC-metoder. f st˚ar f¨or frekvens, t f¨or tid och c1-5 f¨or unika kommunikatio-ner. TDMA visar p˚a hur flera enheter kan dela upp kommunikationen i olika tidsluckor, FDMA visar att frekvensen kan delas upp vilket medf¨or att flera enheter kan kommunicera samtidigt. CDMA anv¨ander sig en PN kod vilket g¨or att de tv˚a enheter som kommunicerar endast f¨orst˚ar sin kommunikationsparter och ser all annan kommunikation som brus. Detta m¨ojligg¨or flera kommunikationer samtidigt.
I de distribuerade metoden finns det ingen kontrollenhet som styr, enheterna samspelar med hj¨alp av olika sorters regelverk ang˚aende n¨ar de kan kommunicera [19]. Kommunikationens uppdelning g¨ors p˚a paket niv˚a och blir mer slumpm¨assig. Aloha och Carrier Sense Multiple Access (CSMA) ¨
ar exempel p˚a distribuerade MAC-metoder. Med Aloha kommer enheten att skicka data utan att
g¨ora n˚agon typ av kontroll av mediet, vilket kan leda till kollisioner [21]. Aloha har f¨ordelen att det ¨ar enkelt att implementera d˚a ingenting beh¨over vara k¨ant om n¨atverkets enheter p˚a f¨orhand. CSMA inneb¨ar att en enhet f¨orst lyssnar p˚a mediet innan den skickar data [22]. Om mediet ¨ar ledigt kan enheten skicka, ¨ar mediet d¨aremot upptaget m˚aste enheten v¨anta en stund innan den f¨ors¨oker igen. Varken Aloha eller CSMA kan ge n˚agra garantier ang˚aende prestanda d˚a det inte g˚ar att avg¨ora n¨ar en enhet kan eller f˚ar skicka data.
2.5
Data¨
overf¨
oring
Radiov˚agskommunikation i det tr˚adl¨osa mediet utf¨ors genom att en modulerad analog Alternating Current (AC)-signal skickas via antenner mellan s¨andare och mottagare [23, s. 25]. Den data som ska skickas ¨ar ofta digital, representerat bin¨art av 1:or och 0:or, och m˚aste d¨arf¨or f¨orst omvandlas till analoga elektromagnetiska v˚agor f¨or att kunna f¨ardas genom luften [6, s. 28]. Den analoga signalen ¨ar kontinuerlig och kan representeras av en sinusv˚ag. De digitala signalerna representeras
av en elektromagnetisk signal som diskret skiftar mellan tv˚a konstanta amplituder. Detta kan
representeras av en fyrkantsv˚ag, Figur 5a och 5b visar skillnaden p˚a analoga och digitala signaler.
0 2 4 6 −1 0 1 Tid→ Amplitud Sinusv˚ag
(a) Periodisk analog signal
0 2 4 6 8 10 0 0.5 1 Tid→ Amplitud Fyrkantsv˚ag
(b) Periodisk Digital signal
Figur 5: Den v¨anstra figuren visar en sinusv˚ag som analogt oscillerar mellan -1 till 1 ¨over en tidsperiod mellan 0 till 6. Den h¨ogra figuren visar en fyrkantsv˚ag som diskret skiftar mellan 1 och 0 ¨over en tidspe-riod mellan 0 till 10. B˚ada v˚agorna representerar olika typer av datakommunikation d¨ar amplitudv¨ardena representerar de bin¨arv¨arden som datakommunikation bygger p˚a.
De digitala signalerna ¨overs¨atts till analoga via en omvandlare och kan sedan via en s¨andare skickas genom en antenn i form av elektromagnetiska v˚agor [6, s. 38]. En mottagare kan sedan l¨asa av den elektromagnetiska signalen och forma om det till en digital signal via ytterligare en omvandlare. Figur 6 visar hur en generisk upps¨attning av radiov˚agskommunikation kan se ut.
Sändare/ Omvandlare
Mottagare/ Omvandlare
Digital Data Digital Data
Analog signal via radiovågor
Figur 6: Figuren illustrerar en generisk modell f¨or tr˚adl¨os datakommunikation. F¨orst initieras kommunika-tionen genom att digital omvandlas till analog. Data skickas sedan via en antenn ¨over det tr˚adl¨osa mediet. En antenn och mottagare tar emot signalen vilket sedan ˚ateromvandlas till digital data igen och kan d˚a anv¨andas av exempelvis en PC.
Signalen kan moduleras och beroende p˚a typen av modulering f˚ar signalen olika egenskaper som
exempelvis mer st¨orningst˚alighet, snabbare data¨overf¨oring eller b¨attre r¨ackvidd [6, s. 29]. Alla typer av elektromagnetiska signaler kan formas via en kombination av olika analoga signaler best˚aende av olika amplitud, frekvens och fas.
Amplitud Ges av radiov˚agens kraft, d¨ar en st¨orre amplitud genererar en st¨orre elektrisk signal hos mottagarens antenn.
Frekvens Hastigheten av radiov˚agens oscillation, representeras i Hertz (Hz).
Fas St˚ar f¨or relationen mellan radiov˚agor, vilket ocks˚a kan f¨orklaras som hur t¨att inp˚a varandra de skickas.
Beroende p˚a den kombination av frekvenser som s¨atts samman f¨or att forma en signal f˚ar signalen ett spektrum, vilket ¨ar den faktor som p˚averkar den m¨ojliga datatakten [6, s. 33-35]. Bandbredden blir p˚averkad av s¨andarens fysikaliska begr¨ansningar och det medium som signalen ska skickas ¨over, vilket kan vara fullt med st¨orningar som orsakar fel och d¨armed s¨amre datatakt. St¨orningarna kan komma att p˚averka signalen p˚a ett s˚adant s¨att att fel data kommer fram, eller att datan inte n˚ar mottagaren. Beroende p˚a vilken typ av fel som uppst˚ar kan kommunikationen p˚averkas olika. Vid bitfel kan felr¨attande koder anv¨andas f¨or att f¨orhindra oms¨andningar, vid f¨orlorad data kan oms¨andningar till¨ampas. Ett annat typ av fel som uppt¨acktes i en studie av Xu [4] ¨ar att s¨andaren skickar ett paket innan mottagaren ¨ar redo att ta emot, vilket resulterar i f¨orlorade paket.
2.5.1 Propagering och Line-Of-Sight
Propageringen av signaler kan ske p˚a olika s¨att beroende p˚a vilka frekvenser som anv¨ands, ge-nerellt s¨att beh¨over frekvenser ¨over 30 MHz Line of Sight (LoS) f¨or att kunna kommunicera v¨al men beroende p˚a material mellan s¨andare och mottagare kan kommunikation ske utan LoS [6, s. 185]. F¨or de flesta material g¨aller att h¨ogre frekvens ger s¨amre signalpropagering. N¨ar en signal propagerar genom ett rum kan den komma att brytas genom splittring, reflektion och diffraktion, vilket genererar flerv¨agsf¨adning, i impulsbaserade UWB system ¨ar signalen n¨astantill immun mot flerv¨agsf¨adning d˚a pulsen ockuperar hela bandbredden [6, s. 124][24]. Pulse Repetition Frequency (PRF) ¨ar den frekvens som preamble och datadelarna av en frame pulserar i n¨ar det kommer till radar system [7,25].
2.5.2 Paketstruktur
Vid datakommunikation mellan noder beh¨ovs det ett regelverk som f¨orklarar hur kommunikationen ska g˚a till v¨aga, och ett s¨att f¨or noderna att f¨ormedla vilka de etablerade reglerna som g¨aller f¨or den nuvarande kommunikationen [6, s. 82-87]. Kommunikation mellan tv˚a noder kr¨aver samarbete
och f¨or att etablera detta anv¨ands Protocol Data Units (PDU). Genom PDUs kan noder s¨atta
upp konnektivitet, best¨amma vilken nod som skickar, vilken som lyssnar, f¨ormedla att data m˚aste skickas igen. En PDUs upps¨attning ¨ar helt beroende av systemet som den anv¨ands i men kan
ex-empelvis inneh˚alla information som Synchronization Header (SHR) Preamble, Source, Destination,
Sequence Number (SQN), Flags, Data och Cyclic Redundancy Check (CRC).
SHR Preamble Best˚ar av 16-4096 symboler som ansvarar f¨or att synkronisera s¨andare och
mottagare genom att skicka kontinuerliga impulser [5,26]. I en studie som gjorts av Xu visade det sig att en preamble p˚a 256 vid 5 m avst˚and gav b¨ast resultat [4].
SQN Anv¨ands f¨or att se vilket paketnummer som skickats, detta ¨ar anv¨andbart
vid exempelvis oms¨andningar. Om en mottagare tar emot ett paket som
den inte f¨orv¨antar sig kan den be om en oms¨andning av det SQN som
saknas.
Flags Kan anv¨andas f¨or olika ¨andam˚al beroende p˚a system. En flagga best˚ar av
en bit, vilket ¨andrar bin¨arv¨arde beroende p˚a om flaggan ska vara aktiv eller inte.
Destination Vart paketet ska skickas, vid st¨orre system kan detta vara anv¨andbart om
PDU m˚aste routas mellan olika enheter.
Source Vilken enhet som genererade PDU, kan anv¨andas f¨or att exempelvis svara
p˚a en data¨overf¨oring.
Data Ovrig data som skickas med paketet.¨
CRC CRC ¨ar en feluppt¨ackande kod som anv¨ands f¨or att se om ett paket som
tagits emot ¨ar densamma som skickades [6, s.139]. N¨ar data skickas utf¨ors
en polynomdivisions ber¨akning och den kvarvarande resten blir en kod
som skickas med datan. Hos mottagaren g¨ors ber¨akningen igen och resten j¨amf¨ors f¨or att validera datans integritet.
Delarna av en PDU ¨ar det som formar paketstrukturen, och beroende p˚a dess information agerar
de kommunicerande noderna olika. Se Figur 7 f¨or hur en PDU kan se ut.
SHR Preamble SQN FLAGS DST SRC DATA CRC
Figur 7: I Figuren ses en sektionsuppdelad PDU d¨ar varje sektion ger n¨atverket och mottagaren information ang˚aende de parametrar och regler som etablerats i regelverket. SHR Preamble ¨ar de symboler som ansvarar f¨or att synkronisera s¨andare och mottagare genom att skicka kontinuerliga impulser. SQN anv¨ands f¨or att se vilket paketnummer som skickas. FLAGS anv¨ands f¨or att meddela vilka regler som kommer g¨alla och ¨ar applikationsberoende. DST ¨ar dit paketet ska och SRC vart det kom ifr˚an. DATA st˚ar f¨or den inkapslade data som skickas i paketet. CRC ¨ar en feluppt¨ackande kod vilket anv¨ands f¨or att validera datans integritet.
2.6
H˚
ardvara
Datakommunikation ser olika ut beroende p˚a dess applikation och d¨arefter har h˚ardvaran for-mats, vilket i sin tur har gett upphov till olika tillverkare med olika fokus p˚a specialdesignad h˚ardvara. Detta g¨aller ¨aven f¨or kommunikation med UWB, d¨ar Decawave ¨ar tillverkare av moduler
2.6.1 Mikrokontroller
En mikrokontroller ¨ar en specialiserad h˚ardvara som kan utf¨ora f˚a saker v¨al [29]. Oftast ¨ar mikro-kontrollers inbyggda i en ett system och har en tendens att anv¨anda lite kraft f¨or anv¨andning i specialiserade milj¨oer d¨ar de kan utf¨ora de uppgifter som de har programmerats f¨or. Ett Integrated
development environment (IDE) kan anv¨andas f¨or att programmera en mikrokontroller. IDE ¨ar
en utvecklingsmilj¨o som hj¨alper programmeraren med hj¨alp som logik och syntax kontroll, auto-matisk kompilering och organisation av kod-bibliotek. S˚adana bibliotek kallas ¨aven Application
Programming Interface (API), vilket ¨ar en samling funktioner, objekt, kommandon och protokoll
som programmerare kan anv¨anda f¨or att styra system [30].
2.6.2 S¨andare, Mottagare och Antenner
N¨ar tr˚adl¨os datakommunikation ska ske ¨ar det s¨andaren som initierar processen genom att om-vandla digital data till en oscillerande AC-signal. Radiov˚agens egenskaper ¨ar beroende av hur den
omvandlade signalen blir modulerad [23]. Efter att radiov˚agen har traverserat mediet kan den
f˚angas upp av en mottagare som omvandlar signalen tillbaka till digital form. Oftast ¨ar dessa tv˚a enheter sammanfogande i en och kallas d˚a s¨andtagare.
S¨andtagare anv¨ander sig av antenner f¨or att skicka AC-signalen [23]. Antennen s¨ander ut radiov˚agen p˚a olika vis beroende p˚a vilken typ av antenn som anv¨ands. Vissa antenner ¨ar riktade och andra sprider sin signal ¨over ett stort omr˚ade. Vilken spridning signalen f˚ar ¨ar beroende av den kraft som tillf¨ors till antennen.
2.6.3 Tr˚adl¨osa Detektorer
Tr˚adl¨osa detektorer ¨ar specialdesignad h˚ardvara, ibland ¨aven kallad Sniffer. En sniffer kan f˚anga upp tr˚adl¨os datakommunikation genom att se p˚a dess radiov˚ag och ge en anv¨andare access till
denna via exempelvis ett paketanalysverktyg som Wireshark [31]. Med verktyget kan sedan
data-kommunikationens paket ¨oppnas upp och analyseras n¨armare. Wireshark grundades 1998 av Gerald
3
Hypotes
Hypotesen ¨ar att ”genom att skicka data mellan positioneringsimpulserna m¨ojligg¨ors
anv¨andandet av samma enhet f¨or positionering och datakommunikation, systemets
prestanda p˚averkas d˚a av MAC-metoden”. Denna hypotes grundar sig i att Persson [2] i sitt
arbete n¨amner att det ¨ar m¨ojligt, men att prestandan kommer p˚averkas negativt.
4
Problemformulering
802.15.4 UWB har applikationer inom b˚ade positionering och data¨overf¨oring, men att kunna
kom-binera dessa skulle kunna vara anv¨andbart inom exempelvis robotiken. Beroende p˚a applikation
av system kan det ¨aven anv¨andas som ett alternativ till Wireless Fidelity (WiFi). Det system
som f¨orklaras i hypotesen finns inte idag, d¨armed ¨ar utveckling och prestandaanalys av ett s˚adant
system av intresse. Problemet med utvecklingen av ett s˚adant system ligger i att MAC-metoden
m˚aste ha st¨od f¨or b˚ade positioneringshandskakningar och data¨overf¨oring. Data¨overf¨oringen m˚aste
ske mellan handskakningarna och detta kommer att p˚averka den kommunikationsprestanda som
systemet kan uppn˚a.
Problemet resulterade i tre fr˚agest¨allningar och syftet med arbetet var att besvara dessa.
Fr˚aga 1: Vilken MAC-metod ¨ar l¨amplig att anv¨anda f¨or b˚ade positionering och data¨overf¨oring? Fr˚aga 2: Ar det m¨¨ ojligt att anv¨anda systemet f¨or b˚ade positionering och data¨overf¨oring genom
att skicka data mellan positioneringsimpulserna?
Fr˚aga 3: Vilken kommunikationsprestanda kan uppn˚as n¨ar systemet anv¨ands f¨or b˚ade positio-nering och data¨overf¨oring?
Arbetet begr¨ansades till att under 10 veckors tid utveckla ett system best˚aende av en tagg och en ankarnod som ut¨over att m¨ata avst˚andet mellan varandra ¨aven skickar data. Eftersom systemet endast skulle prestandatestas begr¨ansades det till att endast ankare skickar data till taggen.
Ytterli-gare begr¨ansningar var att positioneringen implementerades med TWR och prestandam¨atningarna
begr¨ansas till att enbart unders¨oka datatakt, PER, data roundtrip latens, positioneringsfrekvens samt positioneringsprecision.
5
Metod
Strukturen i arbetet utgick ifr˚an tre stycken p˚af¨oljande faser som var kopplade till fr˚agest¨allningarna. Den f¨orsta fasen innefattade en konceptcentrisk litteratursstudie. Den andra, en implementations-period i vilket h˚ardvara konfigurerades, implementationens syfte var att utveckla ett system som skulle kunna verifiera eller falsifiera hypotesen. I den tredje fasen utformades och utf¨ordes prestan-datester d¨ar empirisk data samlades in f¨or att svara p˚a arbetets hypotes och tredje fr˚agest¨allning.
Fas 1: F¨or att svara p˚a den f¨orsta fr˚agest¨allningen utf¨ordes en litteraturstudie. Under studien f¨oljdes den metod som Zobel [32, s. 25] samt Webster och Watson [33] f¨orespr˚akar. Infor-mationen samlades f¨orst in p˚a en bred niv˚a med mycket l¨asning av relevanta artiklar och tidskrifter. F¨or att hitta relevant litteratur b¨or f¨orst ledande bidrag inom omr˚adet l¨asas, och sedan dess k¨allor. Strukturen som anv¨andes ¨ar den konceptcentriska, i vilken infor-mation som samlades in sorterades utefter dess inneh˚all, snarare ¨an dess f¨orfattare. Under insamlande av artiklar var det ocks˚a viktigt att spara alla de tidsskrifter som anv¨andes, eftersom en tidsskrift p˚a n¨atet eventuellt kan tas ned eller skrivas om. Enligt Zobel [32, s. 21] ¨ar det ocks˚a viktigt att endast ge en tidskrift den tid som beh¨ovs. I vissa fall r¨ackte det med att snabbt g˚a igenom texten och i andra kr¨avdes det en mer djupare l¨asning. Litte-raturstudien ska leda till en diskussion och slutsats som skall ge svar p˚a fr˚agest¨allningarna [33].
Fas 2: Under fas 2 utf¨ordes en implementation, vars syfte var att utveckla ett system f¨or att svara p˚a arbetets hypotes och den andra fr˚agest¨allningen samt validera den tidigare litteratur-studiens resultat. Implementationen f¨oljde den iterativa processen, vilket Zobel [32, s. 48] f¨orklarar som den process d¨ar bevis och faktas¨okande ska dikteras av hypoteser, teorier och problemformuleringar.
Fas 3: Under fas 3 utf¨ordes prestandatester p˚a systemet f¨or att svara p˚a den tredje fr˚agest¨allningen.
Datainsamling skedde genom att experiment utformades och empirisk analys utf¨ordes.
Prestandatesterna var av s˚adan karakt¨ar att m¨atdatan som samlades in kunde svara p˚a hypotesen.
6
Etik och samh¨
alleliga aspekter
Under litteraturstudiens utf¨orande var det viktigt att ha ett etisk f¨orh˚allningss¨att i ˚atanke ang˚aende plagiering och copyright. N¨ar artiklar skulle v¨aljas var det ocks˚a viktigt att vara objektiv, egna intressen och preferenser skulle inte p˚averka de valda artiklarna. Artiklarna valdes ¨aven med om-sorg, behandlades r¨attvist och med respekt i sin tolkning.
General Data Protection Regulation (GDPR) etablerar ett regelverk f¨or vilken typ av
person-lig information som f˚ar anv¨andas av individer, f¨oretag eller organisationer [34]. Definitionen av
s˚adan personlig information enligt GDPR ¨ar det som kan identifiera en levande individ,
exem-pelvis namn, personnummer eller bilder. D˚a UWB-Radar har m¨ojligheten att g¨ora avbildning,
vilken kan definieras som en bild, ¨ar det av vikt att f¨orst˚a att den bild som avbildning genererar inte g˚ar att anv¨anda f¨or att identifiera individer och faller d¨armed inte inom ramen av GDPR. UWB kan ¨aven anv¨andas f¨or att se p˚a r¨orelsem¨onster och d¨armed kunna identifiera individer [2]. Det finns flertalet applikationer d¨ar UWB kan anv¨andas, beroende p˚a applikation kan tillst˚and beh¨ovas av p˚averkade individer f¨or att f˚a ta del av dess personliga information. F¨or att fortfarande kunna anv¨anda avbildning f¨oresl˚ar National Health Service att n˚agon typ av pseudoanonimitet kan anv¨andas d¨ar r¨orelsem¨onster inte kan kopplas till individen [35]. Alex Ewerl¨of [36] skriver att tekniker som scrambling, encryption, masking, tokenization och datablurring kan anv¨andas f¨or att
uppn˚a pseudoanonymitet.
Det arbete som utf¨ors har inga direkta kopplingar till GDPR d˚a det ¨ar perstandaanalys som ¨ar av intresse, ingen personlig data kommer insamlas. I ¨ovrigt m˚aste arbetet f¨orh˚alla sig till av tidigare arbetens etablerade normer g¨allande copyright och licenser. Under arbetet har endast frekvenser som ¨ar till˚atna inom Sverige anv¨ants [2].
7
Litteraturstudie
˚
Ar 2007 uppdaterades 802.15.4 standarden och specifikationer f¨or UWB lades till [1] vilket gav
upphov till att mer standardiserad forskning kunde g¨oras inom UWB och flertalet artiklar har
f¨orfattats med olika infallsvinklar. Litteraturstudien resulterade i att de insamlade artiklarna de-lades in i tre relevanta kategorier kopplade till fr˚agest¨allningen.
Tv˚a av de insamlade artiklarna passade inte n˚agon av kategorierna. Det f¨orsta arbetet ¨ar av Dmitri-ev et al. [37] som har unders¨okt uppbyggnaden av noder och n¨atverksstrukturen i sensorn¨atverk baserat p˚a UWB-teknologi. Artikeln tar ¨aven upp olika anv¨andningsomr˚aden f¨or UWB-taggar
och sensorn¨atverk. UWB-taggar kan till exempel anv¨andas som Radio Frequency IDentificators
(RFID). Anv¨andningsomr˚adet f¨or sensorn¨atverk baserade p˚a UWB-teknik kan till exempel vara f¨or kommunikation mellan robotar, multimedian¨atverk och inom sjukv˚arden. Det andra arbetet ¨ar av Antonio Nazabal et al [38] som ˚ar 2012 utf¨ort en studie som s˚ag p˚a hur olika topologier blir p˚averkade av milj¨on vid anv¨andning av tr˚adl¨osa sensorn¨atverk. Simuleringar genomf¨ordes i en 3D milj¨o f¨or att visa p˚a hur olika material p˚averkade signalerna.
7.1
Positionering
Arbeten har utf¨orts inom positionering, fr˚an analyser till experiment, vilket visar p˚a anv¨ andningsom-r˚aden f¨or UWB. Mahfouz et al. [39] har ˚ar 2009 utf¨ort en analys p˚a den utveckling som har gjorts
inom UWB och hur utvecklingen har g˚att sedan ˚ar 2002, d˚a Federal Communications Commission
(FCC) ¨oppnade upp 3,1-10,6 och 22-29 GHz-banden f¨or anv¨andning av UWB. Utvecklingen har
fr¨amst g˚att fram˚at f¨or inomhuslokaliseringssapplikationer. Tv˚a f¨oretag som utvecklar produkter inom lokalisering ¨ar Multispectral Solutions Inc och Ubisense. Deras produkter anv¨ander sig av TDoA f¨or att lokalisera med en tr¨affs¨akerhet p˚a centimeterniv˚a och en r¨ackvidd p˚a 50 m.
Studier har gjorts ˚ar 2016 av Pelka et al. [40] d¨ar de tog fram modeller och algoritmer f¨or hur ankare b¨or placeras vid anv¨andning av positioneringssytem. Mikhaylov et al. [41] har 2017 unders¨okt
positioneringens precision och utf¨ort experiment med positionering av maskiner och m¨anniskor
med hj¨alp av UWB-radar. Resultaten visade p˚a att positioneringen blev p˚averkad av datatakt, frekvens och UWB-s¨andtagarens temperatur. Artikeln visar p˚a att UWB ¨ar av intresse f¨or bland annat positionering inomhus av objekt och m¨anniskor med hj¨alp av den st¨andigt ¨okande m¨angd av Internet of Things (IoT)-enheter.
7.2
Krav p˚
a MAC-metod
Shen et al. [19] har unders¨okt kraven som st¨alls p˚a MAC-metoder f¨or UWB. ˚Ar 2005 gick gruppen
igenom de unika egenskaper UWB har i j¨amf¨orelse med framf¨orallt IEEE-standarden 802.11 och
hur de kan p˚averka valet av MAC-metod. Egenskaperna hos UWB f¨orklaras som att ge b˚ade nya
m¨ojligheter, men ¨aven utmaningar f¨or design av MAC-metod. Artikeln pekar p˚a att overhead ¨ar en av de st¨orre utmaningarna i UWB, men ocks˚a att p˚a grund av UWBs l˚aga effekt kan det leda till samtida kommunikation fr˚an flera enheter, utan att de st¨or varandra. Gruppen har valt att kalla detta f¨or en regionsbaserad transmission.
Ytterliga utmaningar vid val av MAC-metod ¨ar att UWB anv¨ander en stor del av sin
kommuni-kation till att synkronisera klockorna hos s¨andare och mottagare, det b¨or d¨arf¨or finnas i ˚atanke vid val av MAC-metod [19]. De l˚anga synkroniseringstiderna blir mer komplexa n¨ar fler enheter ¨ar
med i UWB-n¨atverket. De rapporterar ¨aven att upp mot 80 % av kommunikationen med TDMA
som MAC-metod anv¨ands till overhead, vilket inte ¨ar s¨arskilt effektivt.
F¨or att f˚a en mer effektiv kommunikation, d¨ar mindre delar av paketen anv¨ands f¨or synkroni-sering och overhead, f¨oresl˚ar Shen et al. [19] st¨orre paket. St¨orre paket leder dock till en h¨ogre risk f¨or paketfel, vilket i sin tur kan leda till mer overhead p˚a grund av fler oms¨andningar. Artikeln f¨oresl˚ar ¨aven en metod d¨ar flera paket skickas samtidigt i en ”burst frame”. Metoden kallas f¨or packet-packing och skulle minska p˚a synkroniseringens overhead. Packet-packing
me-toden kan dock f˚a problem n¨ar det kommer till realtidssystem eftersom paketens storlek kan ge of¨oruts¨agbar maxf¨ordr¨ojning. Till sist f¨oresl˚ar gruppen att l¨anken mellan s¨andare och mottagare inte tas bort efter en synkronisering har gjorts, utan att periodiska keep-alive meddelanden skickas. Det sistn¨amnda kan dock komma att st¨ora ut n¨arliggande ¨overf¨oringar, dra on¨odigt mycket energi och kr¨aver en tv˚av¨agskomunikationsl¨ank.
˚
Ar 2010 skriver ¨aven Gupta och Mohapatra [20] att UWB-teknologin har andra krav p˚a
MAC-metoder ¨an andra tr˚adl¨osa teknologier. Carrier-Sense Multiple Access with Collision Avoidance
(CSMA/CA) ¨ar inte en l¨amplig MAC-metod f¨or UWB p˚a grund av att UWB ¨ar carrierless och
signalen har l˚ag effekt. Enheter kan inte avg¨ora ifall mediet ¨ar upptaget eller ledigt. Kraven p˚a MAC-metod f¨or UWB ¨ar att det ska ha st¨od f¨or synkronisering, exakt timing, positionering och
l˚ag effekt. MAC-metoder f¨or Bluetooth och WPAN kan modifieras f¨or att passa UWB, men vissa
av egenskaperna tappas.
Gupta och Mohapatra [20] skriver att Ultra wideband Concepts for Ad hoc Networks (UCAN) har
modifierat IEEE 802.15.3 standarden f¨or att anpassa denna till UWB. UCAN MAC har st¨od f¨or
b˚ade isokron och asynkron data¨overf¨oring med Quality of Service (QoS) samt st¨od f¨or
positione-ring. MAC-metoden ¨ar centraliserad och har en dynamiskt vald PicoNet Coordinator (PNC). ˚Atta
noder kan tillsammans bilda ett piconet med en master och sju slavar d¨ar flera piconets kan
kopp-las ihop till scatternets. TDMA anv¨ands inom piconets och Time Hopping-Code Division Multiple
Access (TH-CDMA) anv¨ands mellan piconets. Superframes ¨ar 10ms l˚anga och uppdelade i beacon, random access och tidsslottar. Tre typer av paket anv¨ands, de tre ¨ar data, control och command.
Positioneringsdata skickas med command-paketen. UCAN anv¨ander ¨aven
positioneringsegenska-perna f¨or routing av paket. UCAN MAC ¨ar begr¨ansande och icke skalbart.
En annan MAC-metod som forskningsgruppen skriver om ¨ar Complementary code-Code Division
Multiple Access (CC-CDMA) [20]. ¨Aven CC-CDMA ¨ar en MAC-metod som bygger p˚a
IEEE-standarden 802.15.3. CC-CDMA anv¨ander en piconet-arkitektur samt CDMA med ortogonala
kanaler och fasskiftning. Superframes delas in i beacon, CC-CDMA contention free access period och channel time allocation period. CC-CDMA har inga positioneringsegenskaper.
En annan metod som n¨amns ¨ar en Time Hopping (TH) baserad MAC-metod, som ¨ar en
distribu-erad MAC-metod och anv¨ander TH-koder f¨or access till mediet [20]. MAC-metoden har st¨od f¨or m˚anga noder, flexibla topologier, sj¨alvorganiserande och har ¨aven st¨od f¨or QoS. Kollisioner undviks genom att s¨anda flera impulser f¨or en bit. Bandbredden delas in i dynamisk bandbredd och
reser-verad bandbredd. Dynamisk bandbredd anv¨ands f¨or best effort trafik och reserverad bandbredd
anv¨ands f¨or QoS. TH ¨ar en MAC-metod som ¨ar komplicerad att implementera och har mycket
overhead. Den utnyttjar inte heller positioneringsegenskaperna.
Slutsatsen som forskningsgruppen drar ¨ar att de flesta MAC-metoder som ¨ar tillg¨angliga f¨or UWB ¨
ar MAC-metoder fr˚an andra tr˚adl¨osa tekniker som modifierats f¨or att passa [20]. De MAC-metoder som fanns ˚ar 2010 har inte lyckats ta tillvara alla egenskaper som UWB erbjuder.
7.3
J¨
amf¨
orelse mellan TDMA och Aloha
Under ˚ar 2018 har Sakr et al. [42] j¨amf¨ort positioneringssystem som anv¨ander TDMA och Alo-ha. Forskningsgruppen har j¨amf¨ort tv˚a positioneringssytem, LocSpeck och Prozyx, som anv¨ander
802.15.4. LocSpeck ¨ar ett dynamiskt ad hoc UWB-positioneringssystem byggt p˚a DW1000 fr˚an
Decawave. Som MAC-metod anv¨ander LocSpeck Aloha, vilket g¨or att noder kan l¨aggas till och
tas bort dynamiskt. Aloha g¨or dock att det uppst˚ar kollisioner och kapaciteten sjunker till 18 %.
Prozyx ¨ar ett kommersiellt positioneringssystem som kan kopplas ihop med Arduino eller
Ett annat arbete har utf¨orts av Ridolfi et al. [18] ˚ar 2018, d¨ar gruppen utf¨ort en analys p˚a
UWB-positioneringens skalbarhet. Tv˚a olika positioneringsalternativ, TDoA och TWR, kombinerades
med TDMA och Aloha.
Forskningsgruppen tar upp f¨ordelar och nackdelar med TDoA och TWR [18]. F¨ordelen med TDoA
¨
ar att taggen endast beh¨over skicka ett meddelande, vilket sparar energi. En annan f¨ordel ¨ar att alla ankare kan anv¨andas f¨or att hitta taggens position, detta medf¨or st¨orre noggrannhet. Nackdelen med TDoA ¨ar att metoden st¨aller h¨ogre krav p˚a ankarnas klocksynkronisering. I ett TDoA-system har inte taggen m¨ojligheten att ber¨akna sin position. Ankaren m˚aste skicka tillbaka positionen till
taggen. TWR ¨ar mer energikr¨avande och mer komplex, eftersom fler meddelanden skickas ¨over
mediet. En f¨ordel med TWR ¨ar att positionen kan ber¨aknas i taggen.
Valet av MAC-metod och frame size p˚averkar systemets skalbarhet [18]. En random access metod
som Aloha, skickar data n¨ar det finns data att skicka, som f˚ar effekten att endast 18 % av kommu-nikationen ¨ar kollisionsfri. TDMA tilldelar tidsslottar till enheterna och kollisioner kan undvikas.
Gruppen n¨amner ytterligare ett alternativ, vilket ¨ar att kombinera TDMA med FDMA. Enheterna
kan anv¨anda olika kanaler f¨or att kommunicera, men i ett system som anv¨ander TDoA m˚aste alla
ankare anv¨anda samma kanal som taggen. En kombination av TDMA och FDMA skulle kr¨ava
separat h˚ardvara f¨or varje kanal som anv¨ands i systemet.
Resultatet av analysen som Ridolfi et al. [18] gjort var att en kombination av en kort frame size
och TDoA med TDMA st¨odjer flest noder. Kombinationen har st¨od f¨or 5546
positioneringsupp-dateringar per sekund. Med denna frame size har TDoA med Aloha st¨od f¨or 1135 uppdateringar,
vilket var j¨amf¨orbart med de 1240 uppdateringarna som TWR med TDMA har st¨od f¨or. TWR med
Aloha kan anv¨andas med ett f˚atal taggar i systemet, eftersom denna kombination endast st¨odjer 254 uppdateringar per sekund.
8
Implementering
Under implementeringen har den iterativa processen f¨oljts d¨ar faktas¨okande har dikterats av hy-potesen och d¨arefter uppst˚aende teorier utefter de problem som uppst˚att under arbetets g˚ang. F¨orkortningarna Implementation (I#), Resultat (R#) och Diskussion (D#) anv¨ands f¨or att f¨ or-tydliga vilken iteration det skrivs om. F¨or att kunna utf¨ora arbetet har diverse komponenter och
kod anv¨ants. Tv˚a DWM1000 moduler sammankopplade med varsin Arduino MKRZero har anv¨ants
f¨or att skicka data mellan varandra och en Sewio UWB Sniffer har anv¨ants f¨or att unders¨oka da-tataktsprestanda.
MKRZero och Decawave DWM1000
En f¨orsta prestandaanalys av UWB utf¨ordes av Persson och Falk [3], d¨ar de utv¨arderade
kommu-nikation och positionering med Decawaves DWM1000. Resultatet av utv¨arderingen pekade p˚a att
fler tester b¨or utf¨oras och en eventuell testplattform b¨or designas. Plattformen som anv¨andes f¨or
utv¨arderingen bestod utav tv˚a Arduino MKRZero system sammankopplade med varsin DWM1000
s¨andtagare. MKRZero k¨ors p˚a max 3.3V och ¨ar driven av en SAMD21 MCU 32-bit ARM Cortex
M0+ Core. D˚a tidigare tester genomf¨orts p˚a h˚ardvaran fanns det en utg˚angspunkt att utg˚a ifr˚an och d¨armed anv¨ands samma upps¨attning i det egna arbetets implementation och prestandaanalys.
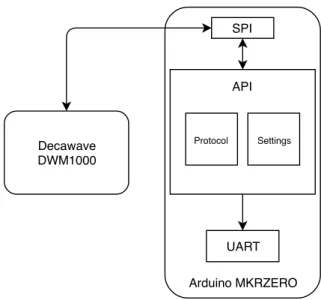
Arduino MKRZero ¨ar en programmerbar enhet med en API och har en Software IDE med st¨od
fr˚an Arduino [43]. Arduino MKRZero kan kommunicera med DWM1000 via en Serial Peripheral
Interface (SPI) och de General Purpose Input Output (GPIO) pins som mikrokontrollern har.
Da-ta f¨or prestandaanalysen samlas in via Universal Asynchronous Receiver-Transmitter (UART). Se
Figur 8 f¨or plattformens logiska upps¨attning.
Arduino MKRZERO Decawave DWM1000 SPI API Protocol Settings UART
Figur 8: Figuren visar plattformens logiska design. Arduino MKRZero agerar som ett programmerbart interface in till DWM1000 modulen via ett API ¨over SPI samt som datainsammlare via UART. Med hj¨alp av APIn kan protokoll och inst¨allningar etableras.
DWM1000 ¨ar en modul som kan utnyttja 802.15.4 UWB standarden [44]. Modulen best˚ar av
ett chipset som anv¨ander en l˚ag energiniv˚a med en fullt integrerad Complementary Metal-Oxide-Semicondctor radiofrekvens s¨andtagare. DWM1000 s¨andtagaren ¨ar optimerad f¨or wide-band med
egenskaper som minimerar brus och st¨orningar f¨or UWB. En f¨orenklad logisk upps¨attning av
SPI
Omvandlare
Analog Mottagare
Analog
Sändare DWM1000
Figur 9: Den logiska designen f¨or DWM1000. D¨ar SPI ger kommandon fr˚an en extern enhet till en digital omvandlare och s¨andare skickar ut signaler via en inbyggd antenn. Antennen kan ¨aven ta emot signaler som g˚ar via en mottagare, genom den digitala omvandlaren och sedan ut till den externa enheten.
Kopplingschema
Arduino MKRZero och Decawave DWM1000 modulen var monterade p˚a ett gemensam m¨onsterkort
och satta i en 3D-utskriven st¨allning, se Figur 10a. Arduino MRKZero och Decawave DWM1000
modulerna som anv¨ants under arbetet var sammankopplade via SPI enligt Figur 10b och Tabell 1.
(a) Nod D WM1000 MKRZER O SPICSn SPIMISO SPICLK SPIMOSI SPIPOL SPIPHA GPIO 5 GPIO 6 17 19 18 20 (b) Kopplingschema
Figur 10: Den v¨anstra figuren visar en UWB-Nod monterad p˚a en 3D-utskriven st¨allning. Enheten best˚ar av Arduino MKRZero och DWM1000 modulen monterad p˚a ett gemensam m¨onsterkort. B˚ada enheterna ¨ar sammankopplade enligt den h¨ogra figuren. F¨orklaringar till kopplingschemat kan ses i Tabell 1 nedan.
Signalnamn Pin Beskrivning
SPICLK 20 SPI Klocka.
SPIMISO 19 SPI data output.
SPIMOSI 18 SPI data input.
SPICSn 17 SPI chip val.
SPIPHA 9 Val av fas vid uppstart.
GPIO (6) i ¨ovrigt.
SPIPOL 10 Val av polaritet vid uppstart.
GPIO (5) i ¨ovrigt.
Tabell 1: Tabellen visar signalnamn i f¨orh˚allande till deras respektive pin samt en beskrivande text till varje Pin. Tabellen ¨ar menad att anv¨andas tillsammans med Figur 10b.
DWM1000 Frekvenskanaler
802.15.4 UWB ¨ar uppbyggd med 16 kanaler, varav Decawave DWM1000 s¨andtagaren kan anv¨anda
kanal 1 till 5 samt 7, med begr¨ansningen att kanal 4 och 7 har en maximal mottagarbandbredd
p˚a 900 MHz [7, 26]. Se Tabell 2 f¨or kanalernas centerfrekvens, bandbredd, samt preamble koder
f¨or 16 och 64 MHz PRF. De rekommenderade koderna g¨or att korskorrelationen mellan kanalerna
minskar. Decawaves rekommendationer n¨ar det kommer till datarate och preamble ses i Tabell 3.
Kanal Nummer Center Frekvens (Mhz) Spektrum (MHz) Preamble koder (16 MHz PRF) Preamble koder (64 MHz PRF) 1 3494.4 499.2 1,2 9,10,11,12 2 3993.6 499.2 3,4 9,10,11,12 3 4492.8 499.2 5,6 9,10,11,12 4 3993.6 1331.2 7,8 17,18,19,20 5 6489.6 499.2 3,4 9,10,11,12 7 6489.6 1081.6 7,8 17,18,19,20
Tabell 2: Respektive kanals centerfrekvens, bandbredd och preamble koder beroende p˚a PRF 16 MHz eller 64 MHz. Data Rate Rekommenderad Preamble 6.8 Mb/s 64, 128, 256 850 kb/s 256, 512, 1024 110 kb/s 2048, 4096
Tabell 3: Decawave rekommenderar dessa parametrar g¨allande datarate och preamble. D¨ar en h¨ogre data-rate tillsammans med en l¨agre preamble generellt skickar signaler snabbare och en l¨agre datarate med h¨og preamble kan skicka signaler l¨angre.
I1: Kombinera data¨
overf¨
oring och positionering
Under litteraturstudien hittades ett arbete Ridolfi et al. [18] gjort, vilket pekade p˚a att Aloha med TWR kan anv¨andas n¨ar en liten m¨angd taggar finns i det etablerade systemet. D˚a det egna systemet anv¨ander sig av en tagg och ett ankare genomf¨ordes en f¨orsta implementation med Aloha som MAC-metod.
Arduino-dw1000 ¨ar ett API skrivet av Thomas Trojer och ¨ar skrivet f¨or att kunna skicka instruk-tioner till DWM1000 moduler [45]. Trojer utvecklar inte l¨angre denna API och dokumentationen ¨ar inte uppdaterad. Ett f¨orsta implementeringsf¨ors¨ok genomf¨ordes med exempelkoderna fr˚an Arduino-dw1000. M˚alet var att testa ifall det gick att skicka data mellan positioneringarna. En funktion som skickar data lades till. Om en positioneringshandskakning utf¨orts skickar ankaret ett antal datapaket till taggen och avslutar sedan med ett Data Fin-packet, se Figur 11. Variabeln som skickades ¨ar ett SQN som ¨okar f¨or varje paket som skickats. F¨or att detta skulle fungera beh¨ovde funktionen schemal¨aggas och loopas parallellt med positioneringshandskakningarna.
TAGG ANKARE Poll Poll Ack Range Range Report Data Data Data Fin . . .
Figur 11: Figuren visar taggens och ankarets utbyte av paket f¨or att utf¨ora TWR. Taggen skickar ett Poll till ankaret, som svarar med ett Poll Ack. Taggen svarar d˚a med ett Range-paket och f˚ar Range Report tillbaka av ankaret. D¨arefter b¨orjar ankare skicka datapaket tills all data har skickats, kommunikationen avslutas med Data Fin och b¨orjar sedan om med ett Poll.
Det f¨orsta testet begr¨ansades till att anv¨anda kanal 5 med 64 PRF och en preamble p˚a 1024, 6,8 Mb/s p˚a ett avst˚and av 1 m. Dessa parametrar var satta som standard i kodbasen och valdes d¨armed som utg˚angspunkt [30]. Se Figur 12 f¨or en logisk upps¨attning av testet. Det f¨orsta testet fokuserade p˚a att unders¨oka systemets funktion snarare ¨an prestanda, d¨arav samlades inte tidsf¨ordr¨ojningen mellan paket¨overf¨oringen inte in.
Distans DWM1000 MRKZERO Tagg DWM1000 MRKZERO Ankare Data Data
Figur 12: Testupps¨attningen utformades genom att s¨atta UWB-noderna p˚a en k¨and distans ifr˚an varandra. Testdata samlades in hos b˚ade tagg och ankare d¨ar tagg samlade in PER och ankare samlade in distansdata samt dess frekvens.
I2: DW1000Ng
Antagandet i diskussion D1 var att den l˚aga positioneringfrekvensen och sen stora m¨angd
pa-ketf¨orluster berodde p˚a att ankaret skickar innan taggen ¨ar redo att ta emot. F¨or att unders¨oka om detta var fallet beh¨ovdes en omarbetning av koden, vilket skulle ge taggen mer tid innan mot-tagning. Under denna process hittades en vidareutveckling av Trojers API. Arduino DW1000Ng ¨
ar en gren av Trojers API d¨ar Biondi och Salvatori st˚ar f¨or utvecklingen [46]. Samma test som i implementation I1 utf¨ordes med den nya APIn f¨or att testa dess funktionalitet.
I3: F¨
or¨
andring av protokoll
Resultatet R2 visade p˚a en f¨orb¨attring i prestanda med DW1000Ng API, men att taggen inte
¨
ar redo att ta emot paket. I ett f¨ors¨ok att ge s¨andtagaren tid, implementerades en ny protokoll-struktur. Genom att l¨agga till Data Poll och Data Fin-paket kunde taggen polla data efter utf¨ord positionering, se Figur 13. N¨ar ankaret f˚ar ett Data Poll svarar den med data till taggen. Om ankaret inte har mer data att skicka, svarar den med ett Data Fin och ytterligare en positionering kan utf¨oras. Nodernas fl¨odeschema efter omskrivning av protokollet visas i Figur 14a och 14b. F¨or att testa systemet anv¨andes samma testupps¨attning som i implementation I1.
TAGG ANKARE Poll Poll Ack Range Range Report Data Poll Data Data Fin Data Poll
Figur 13: Figuren visar taggens och ankarets utbyte av paket f¨or att utf¨ora TWR. Taggen skickar ett Poll till ankare, som svarar med ett Poll Ack. Taggen svarar d˚a med ett Range paket och f˚ar Range Report tillbaka av ankaret. D¨arefter b¨orjar ankare och tagg skicka Data och Data Poll fram tills att ankaret har skickat all data och avslutar med ett Data Fin.
Start
Expected = Poll ACK Start Receive Received
Poll ACK?
Expected = Range Report Send Poll Send Range YES NO Received Range Report? Expected = Data Send Data POLL
Received Data? Start Receive Start Receive YES YES NO NO (a) Tagg Start Expected = Poll Start Receive Received Poll? Expected = Range Send Poll ACK YES
NO Received
Range?
Expected = Data POLL Send Range Report
Received Data POLL? Start Receive Start Receive YES YES NO NO
Expected = Data POLL Send Data
Start Receive Data to send?
Send Data FIN
YES NO Range Failed? Calculate Range YES NO
Send Range Failed
(b) Ankare
Figur 14: Fl¨odesschema f¨or noderna efter omskrivning av protokoll.
I4: Analysera paket med sniffer
F¨or att kunna utf¨ora en djupare analys av kommunikationen mellan noderna anv¨andes det en
UWB-sniffer fr˚an Sewio Networks tillsammans med Wireshark f¨or att l¨asa av paketen. Till detta beh¨ovdes plugins f¨or b˚ade ZigBee Encapsulation Protocol och decawave-twr [47] som ¨ar
kompa-tibla med Wireshark 1.12.x f¨or operativsystemet Windows [48]. Testet i denna implementation
efterliknar det som genomf¨ordes i I1 med skillnaden att en UWB-sniffer placeras halvv¨ags mellan tagg och ankare f¨or att avl¨asa datakommunikationen mellan noderna, se Figur 15.
UWB Sniffer Distans DWM1000 MRKZERO Tagg DWM1000 MRKZERO Ankare Data Data Data Wireshark
Figur 15: Testupps¨attningen utformades genom att s¨atta UWB-Noderna en k¨and distans ifr˚an varandra. Mellan noderna placerades en Sewio UWB Sniffer som via Wireshark samlade in data. Testdata samlades in hos b˚ade tagg och ankare d¨ar tagg samlade in PER samt data roundtrip latens och ankare samlade in uppm¨at distans samt dess frekvens.
I5: Omskrivning av paketstrukturen
I resultat R4 kunde det konstateras att paketen som skickades mellan enheterna inte var skriva p˚a ett korrekt s¨att. Detta ledde till en omskrivning av paketstrukturen. Systemet gick fr˚an att en-dast skicka data till att skicka en hel 802.15.4 MAC-frame som f¨oljder den struktur som Decawave rekommenderar [7]. Tabell 4 visar uppbyggnaden av ett 802.15.4 frame. F¨or implementationen ¨ar frame control f¨altet av vikt samt payload f¨altet med inkapslad protokolldata, se Figur 16.
MAC Header MAC Payload MAC Footer Frame Control Sequence Number Destination PAN Identifier Destination Address Source PAN Identifier Source Address Aux Security Header Frame Payload FCS 2 oktetter 1 oktett 0 or 2 oktetter 0, 2 or 8 oktetter 0 or 2 oktetter 0, 2 or 8 oktetter 0, 5, 6, 10 or 14 oktetter Varierande antal oktetter 2 oktetter
Tabell 4: MAC headern f¨or en 802.15.4 frame d¨ar den f¨orsta sektionen talar om hur resten av framen ¨ar formaterad. Alla sektioner f¨orutom payload har ett fast antal oktetter tilldelad till sig, payload sektionen ¨ar den del av framen som inneh˚aller den data som skickas.
Frame Type Frame Control Sequence Number Destination PAN Destination Address Source PAN Source Address Security Header Payload FCS Frame Type MAC Header Decawave Frame Control
Figur 16: En visuell representation hur 802.15.4 MAC Frame f¨orh˚aller sig till Frame Control och Payload. Frame Control ¨ar det f¨orsta f¨altet av paketet och talar om hur resten kommer vara uppbyggt genom de bitv¨arden som finns i frame type. Den inkapslade payload talar ocks˚a om f¨orst vad det ¨ar f¨or typ av payload innan resten av data kan ses. Detta f¨or att kunna identifiera vilka regler som ska appliceras p˚a paketet och den data som skickas.
I implementationen har frame control 0x41 anv¨ands, vilket innebar att det ¨ar ett data paket, utan
s¨akerhet, ingen frame pending, ingen ack och med en komprimerad Personal Area Network (PAN)
ID. Parametrarna valdes f¨or att passa protokollet och systemets utformning med f˚a enheter. Frame control f¨altet best˚ar av tv˚a oktetter och visar hur resterande paket ¨ar uppbyggd, se Tabell 5 och Tabell 6 f¨or hur strukturen av frame control f¨altet kan formateras och hur dess olika v¨arden ger olika MAC Frame struktur. F¨or att testa detta utf¨ordes samma test som implementation I4.
Bits 0 to 2 Bit 3 Bit 4 Bit 5 Bit 6 Bits 7 to 9 Bits 10 & 11 Bits 12 & 13 Bits 14 & 15 Frame Type Security Enabled Frame Pending ACK Request PAN ID Compress Reserved Dest. Address Mode Frame Version Source Address Mode Tabell 5: Visar bitarnas uppbyggnad och dess funktion fr˚an bit 0 till 15 av 802.15.4 Frame Control f¨altet.
Frame Type F¨altet (FC bits 2 to 0) Frame 0, 0, 0 Beacon 0, 0, 1 Data 0, 1, 0 Acknowledgement 0, 1, 1 MAC command 1, 0, 0 Reserved 1, 0, 1 Reserved 1, 1, 0 Reserved 1, 1, 1 Reserved
Tabell 6: Frame Type f¨altets bitv¨arden vilket f¨orklarar vad det ¨ar f¨or frame som skickas. V¨anster kolumn, ger bitv¨arde i f¨orh˚allande till h¨oger kolumns frame typ.
MAC Payload delen av framen ¨ar formaterad som ett Decawave message, se Tabell 7. Pakettypen,
storlek och payload som skickas kan ses i Tabell 8.
Frame Type Frame Payload 1 oktett Varierande antal oktetter
Tabell 7: 802.15.4 Framens Payload best˚ar av Decawave Frames, Frame Type f¨altet p˚a en oktett f¨orklarar vad Frame Payload inneh˚aller.
Frame Type F¨altet
(1 oktett) Frame Payload storlek (Bytes) Payload 0x21 POLL 0 0x10 POLL ACK 0 0x29 RANGE 15 Time
0x2A RANGE Report 6 Range
0xFF RANGE Failed 0
0xA5 DATA 80 Data
0xA6 DATA POLL 0
0xA7 DATA FIN 0
Tabell 8: Den f¨orsta kolumnen f¨orklarar vilken oktett som ska anv¨andas f¨or att forma olika typer av Deca-wave frames den tredje och fj¨arde kolumnen f¨orklarar framens storlek respektive vilken data den inneh˚aller.
Ett problem som uppt¨acktes under implementation I3 var att taggen ibland fastnade i en resetloop,
p˚a grund av detta lades en mjukvaruomstart till som startar om MKRZero n¨ar den startat om
9
Prestandatest
F¨or att unders¨oka prestandan p˚a kanal 5 anv¨andes det under testerna fyra olika parametrar, PRF, preamble, distans och datarate. Valet av kanal grundade sig i att Kanal 5 ¨ar utg˚angsl¨aget f¨or
DWM1000 modulen och att studien som Persson och Falk utf¨ort visar att kanal 5 och 7 var de
kanaler som presterade b¨ast [3,7]. Max antal datapaket
F¨or att utforma prestandatestet beh¨ovde f¨orst det maximala antalet datapaket som gick att skicka med systemet hittas. Detta f¨or att kunna etablera en h¨ogsta datatakt med aktuell implementation. Testet genomf¨ordes genom att st¨alla noderna tv˚a meter ifr˚an varandra och m¨ata hur antalet paket p˚averkar positioneringsfrekvensen. Distansen valdes d˚a meterv¨arden ¨over 2 meter b¨orjade visa en instabil kommunikation. Paketm¨angden som skickades mellan varje positionering ¨okades successivt tills m¨angden datapaket per sekund slutade variera.
Datainsamling
Under testerna samlas data in fr˚an Arduinon genom att l¨asa ifr˚an det seriella porten i 60 sekunder. All data sparades i logfiler och formaterat i Comma Separated Values (CSV). Filen anv¨andes sedan i ett python-script vilket ber¨aknade alla kolumners medelv¨arde. Denna data anv¨andes sedan f¨or att generera grafer.
Den data som samlades in var data roundtrip latens, positioneringsprecision, PER, positionerings-frekvens och datatakt. Alla data f¨orutom datatakt samlades in via en PC kopplad till respektive UWB-nod. Datatakten m¨attes med hj¨alp av UWB-sniffern. Noderna monterades p˚a stativ av typen Gorilla Pod, se Figur 17. Testupps¨attningen f¨or prestandatesterna visas i Figur 18.
Positioneringsprecision Genom att st¨alla noderna med k¨anda avst˚and mellan varandra
kun-de systemets avst˚andsm¨atning unders¨okas. Det faktiska avst˚andet subtraherades fr˚an det uppm¨atta avst˚andet. Differensen presente-ras i procent av det faktiska v¨ardet. Detta f¨or att l¨attare kunna se trender i avst˚andsm¨atningen.
Positioneringsfrekvens Positioneringsfrekvensen visar hur ofta systemet lyckas utf¨ora en
av-st˚andsm¨atning. Denna visas i Hz. Det vill s¨aga positioneringar per sekund.
Data Roundtrip Latens Tidsf¨ordr¨ojningen ser p˚a en hel roundtrip av data, detta genom att
tidsst¨ampla n¨ar en enhet fr˚agar efter data med ett Data Poll-paket och n¨ar Data paket tas emot. I denna rapport kommer ben¨amningen Data Roundtrip Latens mena p˚a den tidsf¨ordr¨ojning som det tar f¨or taggen att skicka ut ett Data Poll och f˚a Data tillbaka ifr˚an ankaret.
Datatakt Datatakten f˚angades upp av UWB-sniffern genom att avl¨asa hur
m˚anga paket per sekund som skickades. Med datatakt menas den
¨
overf¨oringshastighet som uppn˚as av systemet om endast data togs med i ber¨akningen. D˚a paketstorleken var k¨and (82 bytes) kunde detta sedan anv¨andas f¨or att f˚a fram den faktiska datatakten i kilobit per sekund.
Packet Error Rate PER uppm¨attes genom att kontrollera de inkommande datapaketens
inneh˚all och j¨amf¨ora dessa mot det f¨orv¨antade inneh˚allet. Om syste-met rapporterade ett fel markerades detta som ett PER. Att notera ¨
ar att det ¨ar PER p˚a datapaketet som har kontrollerats, inte hela 802.15.4 framen.
Figur 17: Noderna monterades p˚a stativ av typen Gorilla Pod UWB Sniffer Distans DWM1000 MRKZERO Tagg DWM1000 MRKZERO Ankare Data Data Data Wireshark
Figur 18: Testupps¨attningen utformades genom att s¨atta UWB-Noderna en k¨and distans ifr˚an varandra. Mellan noderna placerades en UWB-Sniffer som via wireshark samlade in data. Testdata samlades in hos b˚ade tagg och ankare d¨ar tagg samlade in PER samt data roundtrip latens och ankare samlade in uppm¨at distans samt dess frekvens. Sniffern samlade upp ¨overf¨orda datapaket per sekund, vilket senare anv¨andes f¨or att ber¨akna datatakten.