No. 66 ' 1982
66
Statens väg- och trafikinstitut (VTI) - 581 01 linköping
National Road &Traffic Research Institute - 5-581 01 Linköping Sweden
Upptäckt av hinder och visuell ledning
i fordonsbelysning
av Gabriel Helmers
Särtryck av artikel i Lampetten, Vol. 16, nr 2, oktober 1981.
Utgivare: Lysteknisk Laboratorium och Lysteknisk Selskab,
Herlev Hovedgade 188, 2730 Herlev, Danmark.No. 66 1982 Statens väg- och trafikinstitut (VTI) - 581 01 linköping
National Road & Traffic Research Institute ~ S-581 01 Linköping - Sweden
Upptäckt av hinder och visuell ledning
i fordonsbelysning
av Gabriel Helmers
Utgivare: Lysteknisk Laboratorium och Lysteknisk Selskab,
66 Särtryck av artikel i Lam petten, Vol. 16, nr 2, oktober 1981. Herlev Hovedgade 188, 2730 Herlev, Danmark.
Upptäckt av hinder och Visuell ledning
i fordonsbelysning
Affil. dr. Gabriel Helmers
Gabriel Helmers har arbetat med
mörkertrafikpro-blem sedan 1968,
först vid Uppsala
universitet och se dan 1977 vid sta-tens väg- och tra-fikinstitut, Linkö
ping, Sverige.
Resumé
Artikeln behandlar frågan vad en bilfö-rare måste kunna seför säker körning vid fordonsbelysning i mörker. Det ena sva-ret på denna fråga är att föraren måste kunna upptäcka hinder på vägen på till-räckligt långa avstånd. Sammanfattande forskningsresultat avseende siktsträcka till hinder på vägbanan presenteras och ställs i relation till lämpliga säkerhetskri terier. Förutsättningarna för att kriterier-na skall vara uppfyllda specificeras.
Det andra svaret på frågan är att
föra-ren också måste kunna se själva vägen tillräckligt väl. Lämpliga
säkerhetskrite-rier avseende vägens synbarhet
diskute-ras. I vilken utsträckning dessa kriterier är uppfyllda har vi idag mycket bristfällig kunskap om. Varför har denna kun-skapsbrist uppstått och hur skall den bäst kunna avhjälpas?
Inledning
Mörkertrafik i fordonsbelysning utgör en särskilt dålig visuell miljö för trafi-kanterna (1). När man skall försöka
för-bättra denna dåliga visuella miljö måste man ställa sig frågan: Vad måste for
donsföraren kunne se för att med
bibe-hållen säkerhet framföra fordonet?
Siktsträcka till hinder
Ett av svaren på denna fråga är att for donsföraren måste kunna upptäcka hin-der på vägen på så stort avstånd framför fordonet att han kan undvika att köra på hindret (2). Man har med framgång ut-vecklat metoder för mätning av avstån-det till hinder vid uppstäckt (3; 4). Detta avstånd kallas i det följande siktsträcka till hinder. Metoder för mätning av sikt-sträcka till hinder har flitigt kommit till användning både inom som utom Nor-den. Ett stort antal undersökningar har utförts avseende siktsträckor till hinder i
olika situationer.
Säkra siktsträckor till hinder
De empiriskt erhållna siktsträckorna måste utvärderes genom att jämföras
med ett säkerhetskriterium, dvs med en
kortaste säkra siktsträcka. Den kortaste säkra siktsträckan i sommarväglag och vid en hastighet av 90 km/h har av trafik forskningsgruppen vid Uppsala univer sitet beräknats vara 100 m (5). Nordiska Vägtekniska Förbundet (NFV) har å an-dra sidan beräknat att en säker sikt
sträcka vid 90 km/h är 140 m lång (6).
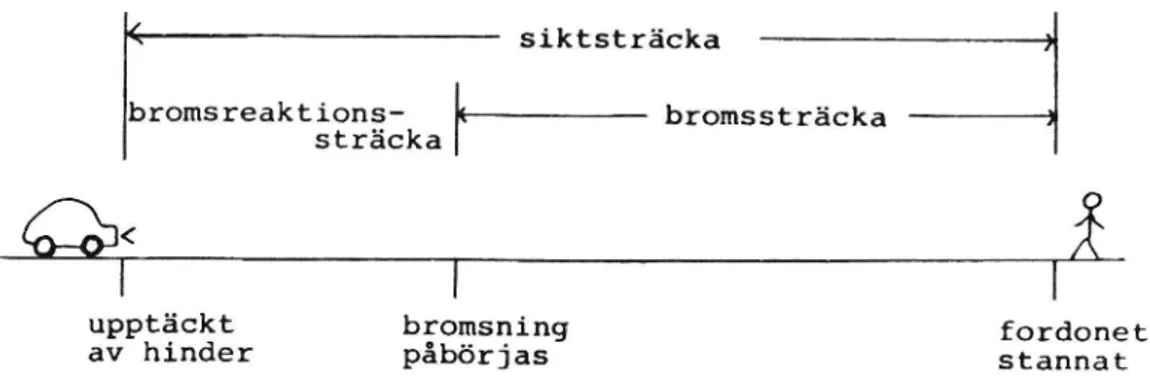
Den kortaste säkra siktsträckan till hinder vid upptäckt består av två olika
delar, dels en bromsreaktionssträcka
och dels en bromssträcka enl figur 1. Skillnaden mellan uppsalaforskarnas och NVFs kriterium för säker siktsträc ka beror dels på att de förra räknat med
k siktsträcka
bromsreaktions Lf bromssträcka 1
sträckalx
©;
|
upptäckt
av hinder påbörjasbromsning
lå
fordonet
stannat
Figur 1 . Den kortaste säkra siktsträckan till hinder utgörs av den sammanlagda längden av bromsreaktions-sträckan och bromsbromsreaktions-sträckan.
en kortare bromsreaktionstid mellan upptäckt och bromsning - 1,2 jämfört
med 2,0 sek. - samt en bättre friktion
mellan däck och vägbana vid bromsning - u = 0,45 jämfört med u = 0,35 (6; 7).
Man behöver här inte ta ställning för något av de båda säkerhetskriterierna. Istället bör man betrakta saken så att det minst stränga kravet (dvs 100 m vid 90 km/h) måste vara uppfyllt medan det strängare kravet (dvs 140 m Vid 90 km/h) borde vara uppfyllt.
Uppmätta och säkra siktsträckor
När man jämför empiriskt erhållna sikt-sträckor med dessa säkerhetskriterier (dvs 100 och 140 m) är det lämpligt att särskilja fyra situationer definierade av strålkastartyp och förekomst av mötan de trafik.
Förhållandet mellan de i fältförsök uppmätta siktsträckorna och de ovan uppställda säkerhetskriterierna framgår av tabell 1.
Tabellen visar att endast vid helljus utan möte är säkerhetskriterierna upp fyllda. Vid alla mötesbetingelser samt vid alla halvljusbetingelser är inget av kriterierna uppfyllda.
Detta är det nedslående resultatet av alla de ansträngningar som gjorts
avse-ende strålkastarförbättringar under fle-ra decennier.
Strålkastarförbättringar i framtiden Nuvarande halvljus torde nu närma sig ett utvecklingsstadium som innebär att inga väsentliga siktsträckeförbättringar kan väntas i framtiden. Det fordras en ny teknik för att övervinna det bakom-liggande bländningsproblemet. Detta
utgör en absolut förutsättning för att
man i framtiden skall kunna uppnå de ovan uppställda säkerhetskraven (8).
I väntan på en ny strålkastarteknik
måste man försöka åstadkomma
lösnin-gar med mera begränsad giltighet.
Strålkastartyp Halvljus Helljus
Möte <100 < 100
Ej möte <100 >140
Tabell 1. Siktsträckor till hinder i fyra situationeri
förhållande till säkerhetskriterierna 100 resp 140 m.
Siktsträckan uppfyller inte kriteriet: (<). Siktsträc
Siktsträcka
(m) O O Ljusgrått hinder ('i-0,18) A? x - _l Hörkgrått ' " - (Y-0,07)
llOJ> ... ___ . Svart - " ' (Y'0,02)
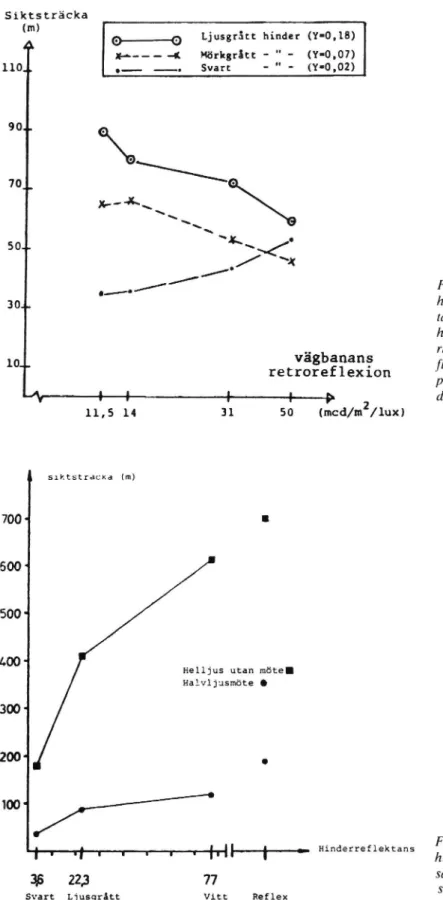
901» x 70. \ x' " *x N \ xs. so,. kx ' ./ xx / . _// Figur 2. Siktstråckor i
+ halvljus utan möte till
svar-ta, mörkgrå och ljusgrå
hinder på vägbanor av va-,, b rierande ljushet (retrore-10..- retroreflex1onvag anang flexion ). Hindren har varit. o "
placerade mitt pa vagen
M,, lr , ,L ; t 2 dvs till vänster om det
pas-11 , S 14 31 SO ( mcd/m / lux) serande fordonet.
ll sxktstracxa (m)
700 - |
600 * 500 "
LOO- Helljus utan möte-Halvljusmöte .
300 '
200 " .
100 '
Figur 3. Siktsträcka till
"r ' __ T'__r__'__|___'__'__|_H l... .H.. Hinderreflektans _ _
hinder av olika reflektans samt med reflex i helljus
3,6 223 77 samt vid möte på halvljus.
Förbättringer av vägbanans
reflexions-egenskaper
I en nyligen publicerad svensk undersök ning (9) har siktsträckan till hinder på vägbanan uppmätts som funktion av vägbanans retroreflextion. Vägbanorna mot vilka hindren upptäckts har varierat från svart nylagd asfalt till ny ytbehand-ling av mycket ljus natursten. Hindren har varierat i reflektans från svart till ljusgrått.
Resultaten, enligt figur 2, visar att inte ens den gynnsammaste kombina
tionen av hinder och vägbana i dessa
försök (dvs ett ljusgrått hinder som upp-täcks mot svart nylagd asfalt som bak grund) resulterar i halvljussiktsträckor som uppfyller det minst stränga säker hetskriteriet (dvs 100 m).
Förbättringar av hindrens reflexions egenskaper
En möjlighet som däremot visat sig vara framgångsrik är att förbättra hindrens reflexionsegenskaper. Att förse fotgän-gare och andra hinder med reflex har visat sig vara den åtgärd som oberoende av hindrens och (torra) vägbanors flexionsegenskaper i övrigt visat sig re-sultera i siktsträckor större än 100 m. Som en illustration till detta presenteras i figur 3 de siktsträckor till hinder med och utan reflex som Berggrund och Rumar erhållit vid fältförsök (10).
Huvudproblemet består inte längre i att utveckla tillräckligt effektiva reflexer ur ljusteknisk synvinkel utan att utveck la reflexer som kommer till allmän an-vändning. Detta innebär bl a att sanno
likheten skall vara mycket hög för att
varje fotgängare och helst också alla öv riga potentiella hinder i mörkertrafiken skall vara utrustade med reflexer. Dessa skall vara utformade så att de i varje situation reflekterar strålkasterljuset tillbaka mot fordonsföraren.
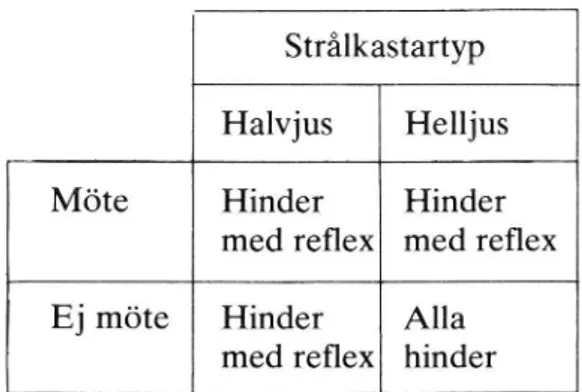
Resultat
Minimiförutsättningarna för att säker hetskraven skall vara uppfyllda vad gäl ler siktsträcka till hinder på vägbanan framgår av tabell 2.
Reflex är således nödvändig ur säker-hetssynvinkel vid all halvljuskörning samt i alla mötessituationer.
Vägens visuella ledning
I inledningen ställdes frågan: Vad måste fordonsföraren kunna se för att med bibehållan säkerhet framföra fordonet?
Den första delen av svaret, som ovan behandlats, är att föraren måste kunna
upptäcka hinder. Den andra delen är att föraren skall kunna se själva vägen. Detta är nödvändigt för att föraren med bibehållen säkerhet skall kunna anpassa fordonets hastighet och riktning efter vägens linjeföring samt efter de krav i övrigt som olika manövrer ställer.
Vägens synbarhet eller visuella led ning torde bero på ett stort antal fakto rer som t ex reflexionsegenskaperna hos
vägbana, vägmarkeringar,
vägkantsre-flektorer samt i övrigt hos vägens sidout
rymme. Vägens synbarhet kan på goda
grunder antas vara ett resultat av dessa
olika faktorer i samverkan (11).
Strålkastartyp Halvjus Helljus Möte Hinder med reflex Hinder med reflex Alla hinder Hinder med reflex Ej möte
Tabell 2. Krav som ställs på hinder i olika
Säker visuell ledning hos vägen
Om föraren skall kunna framföra fordo net säkert innebär detta bla att han skall kunna stanna fordonet inom den sträcka
av vägen han kan överblicka. Säkra
siktsträckor till hinder på vägen skulle då också kunna utgöra kriterium för på
vilket avstånd föraren måste kunna
upp-fatta vägens vidare sträckning för att med bibehållen säkerhet kunna framfö ra fordonet.
En säker omkörningsmanöver fordrar däremot att föraren kan överblicka en betydligt längre vägsträcka. Detta för att kunna kontrollera att inga sikthinder
finns, som t ex kan skymma ett mötande
fordon.
Vid omkörning har NVF beräknat en minsta säkra omkörningssikt som vid 90 km/h är 345 m (6). Denna omkörnings-sikt skulle kunna utgöra ett lämpligt sä-kerhetskriterium för den vägsträcka en förare korrekt måste kunna varsebli för säker omkörning.
Vid sidan av att vägen måste vara synbar på relativt stora avstånd bör den dessutom ha god synbarnet i en vid
sektor alldeles framför fordonet. Detta
för att föraren i perifert seende utan svårighet skall kunna kontrollera fordo-nets sidoläge på vägen.
Har vägen en säker visuell ledning?
Hur uppfylles idag de säkerhetskrav av-seende vägens synbarhet eller visuella ledning, som bör ställas enligt föregåen-de avsnitt? Svaret på föregåen-denna fråga kan inte ges då inga systematiska studier av vägens visuella ledning har genomförts. Den subjektiva uppfattning man som bilförare får av Vägens synbarhet är att den ofta är otillräcklig. Detta gäller i särskilt hög grad vid fordonsmöten då vägbanan varit Våt.
En undersökning av Padmos (12), i
vilken fordonsförarnas subjektiva
svå-righeter vid mörkertrafik kartlagts, re-dovisas som huvudresultat att förarna upplever vägens dåliga synbarhet, som det största säkerhetsproblemet vid kör-ning i mörker.
Detta tyder på att vägen ofta inte uppfyller de krav på synbarhet eller visu ell ledning, som bör ställas från säker-hetssynspunkt. Samtidigt måste man konstatera att det föreligger en nästen total brist på kunskap inom området. Orsaken till detta är att inga beprövade metoder har utvecklats.
Nya metoder för mätning av vägens visu-ella ledning
Ett förslag till metod för mätning av vägens visuella ledning är att mäta av-ståndet från föraren fram till den punkt i
vägrummet bortom vilken föraren ej
korrekt kan uppfatta vägens fortsatta sträckning (13).
En sådan metod skulle kunna ge möj lighet att beskriva hur vägens visuella ledning varierar beroende på
- vädret (klar sikt, regn, dimma etc)
- vägbanans reflexionsegenskaper (tor-ra VS. våta vägbanor; ljusa vs mörka vägbanor)
- vägmarkeringarnas retroreflexion vägkantmarkeringars förekomst och retroreflexion.
En kompletterande metod för mät-ning av vägens visuella ledmät-ning är att registrera fordonets sidoläge på körfäl-tet (14). Variationen i sidoläge hos for donet skulle då kunna vara ett alterna-tivt mått på hur väl föraren kan se vägen. En nackdel med detta mått kan vara att man kan förvänta att det är starkt hastig hetsberoende och mera kopplat till väg-markeringarnas synbarnet och inte till synbarheten hos hela vägrummet.
Mätproblem
En svårighet vid mätning av vägens visu ella ledning är att själva vägen ej enkelt låter sig varieras vid varje undersök ningstillfälle. Man får istället nöja sig
met att använda de vägar som finns med
den naturliga variationen i reflexions-egenskaper över tid hos de olika kompo-nenterna i vägmiljön, dvs hos vägbanan, vägmarkeringar, vägkantsreflektorer samt vägens sidoutrymme.
En intressant möjlighet att variera vissa aspekter hos de olika komponen-terna i vägmiljön på ett välkontrollerat sätt liksom vägens linjeföring i övrigt
ut-göres av en datorgenererad vägbild. I
detta fall uppstår svårigheten att kon-trollera att de resultat som erhålles med den simulerade vägbilden även gäller på
Nyttan av att mäta vägens visuella ledning Genom att mäta vägens visuella ledning under olika förhållanden kan man speci-ficera de villkor som gäller för att rimliga säkerhetskriterier skall vara uppfyllda. Utvärderingen av olika material (t ex vägbeläggningar) och visuella hjälpme-del i vägrummet (t ex vägmarkeringar) utifrån dess effekter på vägens visuella ledning bör ge väghållaren bättre be-slutsunderlag vid val av åtgärder.
Normer för reflexionsegenskaper och utföranden i övrigt för vägmarkeringar och vägkantsreflektorer kan direkt för ankras i synbarhetsmått.
Forskning och utveckling inom områ-det bör stimuleras när effekter på vägens visuella ledning av olika åtgärder objek-tivt kan mätas. Detta skapar i sin tur
förutsättningar för snabbare
förbättrin-gar i framtiden.
Sammanfattande synpunkter
Fordonsförarens visuella miljö är dålig vid fordonsbelysning i mörker.
Rimliga säkerhetskriterier avseende hinders synbarhet är endast uppfyllda då hindren är utrustade med reflex. Ny teknik för kontroll av bländning från mötande trafik fordras för att ändra på detta förhållande.
Rimliga säkerhetskriterier avseende Vägens synbarhet har diskuterats. I vil ken utsträckning dessa kriterier är upp fyllda är okänt. Orsaken till detta är att några vedertagna metoder ej utvecklats för kvantifiering av vägens synbarhet.
Det är nödvändigt att utveckla goda metoder, som ger möjligheter att kvan tifiera vägens synbarhet under olika för hållanden. Den kunskap vi då tillägnar oss är nödvändig dels för val av lämpliga åtgärder, samt dels som stimulans för framtida utveckling av nya material och visuella hjälpmedel.
En systematisk förbättring av vägens synbarnet eller visuella ledning skulle kunna vara ett effektivt sätt att reducera de olyckstyper som vid sidan av påkör-ning av hinder är överrepresenterade i mörker, t ex singelolyckor. Referenser ]. 10. II. 12. 13. 14.
Richards 0. W.: Visual needs and possi bilities for night automobile driving. American Optical Corporation South-bridge, Massachusetts 1967.
. Johansson G. & Rumar K. : Visibility di-stances and safe speeds for night driving car meetings. CIE, Washington 1967. . Jena V.]. : A method of evaluating
see-ing distances on a straight road for ve-hicle meeting beams. Trans. Illum.
Engn. Soc. Vol. 20, 1955, 5.57. . Johansson G. & Rumar K. : Visible
di-stances and safe approach speeds for night driving. Ergonomics. Vol. 11, 1968. Nr. 3.
. Rumar K.: Pedestrian safety in night driving. International Conference on pe destrian safety. Haifa 1976.
. Nordiska vägtekniska Förbundet (NVF).
Färdtekniska grundvärden. Rapport nr. 5. 1976.
.Johansson G. & Rumar K.: Drivers, brake reaction times. Human Factors. Vol. 13, 1971. Nr. 1.
. Ramar K.: Effectiveness of old, new,
and future motor-car lighting. Applied Ergonomics. Vol. 2, 1971. Nr. 2.
. Helmers G. & Ytterbom U.: Siktsträckai
halvljus till hinder på torra vägbanor av varierande ljushet. Rapport 202. Statens väg- och trafikinstitut, Linköping 1980. Berggrund U. & Rumar K.: Fotgängar reflexer egenskaper och synbarhet. O publicerad statusrapport, Psykologiska institutionen, Uppsala universitet, 1975. Mörkertrafik. Lystekniske og visuelle forhold på veje uden fast belysning. Pro-blemformulering og projektforslag. Rapport nr. 3, 1980.
Padmos P. (Genom personligt samtal) Institute for Perception, Soesterberg, Holland, 1980.
Helmers G.: Vägens visuella ledning i mörker. Meddelande 115. Statens väg-och trafikinstitut, Linköping 1978. Barry S. & van de Lagemaat C.: An in strument to measure the lateral position of a vehicle on the road. Institute for Perception TND, Soesterberg, Holland, 1972.