Statens väg- och trafikinstitut (VTI) : Fack - 58101 Linköping National Road & Traffic Research Institute - Fack - 58101 Linköping : Sweden
Utveckling av körsimulator
Delrapport: Förslag till styrstrategi för rörelsesystemet vid simulering av horisontella accelerationer
11
av Bengt-Göran Bergdahl
Statens va'g- och trafikinstitut (VFI) Fack 581 01 Linköping National Road & Traffic Research Institute Fack 581 01 Linkoping Sweden
Utveckling av körsimulator
Delrapport: Förslag till styrstrategi för rörelsesystemet
vid simulering av horisontella accelerationer
11
av Bengt-Göran Bergdahl
Innehållsförteckning
Förord
UTVECKLING AV KÖRSIMULATOR. Projektbeskrivning ABSTRACT
Sammanfattning INLEDNING
Härledning av skenbara accelerationen Förenklad rörelsesystemmodell
STYRDON FÖR RÖRELSESYSTEMET Modell av servosystemet
STYRDONETS OCH REGLEROBJEKTETS DYNAMIK Frekvensanalys
Stegsvarsanalys
REGLERTEKNISKA BEGRÄNSNINGAR
Möjligheter att förbättra frekvensegenskaperna i en omgivning till pendelfrekvensen
KOMPENSERING
Statisk kompensering Dynamisk kompensering
SIMULERINGSRESULTAT MED KOMPENSERAT RÖRELSESYSTEM
Tillståndsbeskrivning av systemet Plotresultat REFERENSER APPENDIX Sid 11 12 15 15 21 25 26 29 31 31 37 37 40 48
FÖRORD
Denna rapport är den andra i serien "Utveckling av körsimula-tor". Den tidigare utgivna delrapporten är:
Nordmark, Staffan (oktober 1976): Matematisk fordonsmodell. VTI Meddelande Nr 4.
Arbetet med att specificera, konstruera och tillverka en
körsimulator vid VTI har dock pågått en längre tid varför
flera äldre dokument också ingår i projektets underlag.
Efter det att institutet 1975 flyttade in i nya och
ändamåls-enliga lokaler har utvecklingsarbetet kunnat gå in i en mer
intensivcxülkonkretiserad fas. Det har därför bedömts gynn-samt för överblick och kontinuitet inom projektet, om dokumen-tationen av denna fas kan hållas samman under en gemensam
huvudrubrik. För att ge en enhetlig bakgrund inleds varje rapport i serien med en översiktlig projektbeskrivning (gula sidor).
Linköping i oktober 1976 Lennart Strandberg
Projektledare för körsimulatorutvecklingen. Trafikant- och fordonsavdelningen
Statens väg- och trafikinstitut Telefon 013-11 52 00
ABSTRACT
This paper suggests a control system for a moving base system in a planned driving simulator.
The moving base system will give the driver the characteristic acceleration cues by rotations around two orthogonal axes. Each of these rotations is controlled by a position servo-mechanism.
A fifth-order filter is part of the control system to reduce errors in phase and amplitude.
A mathematical model of the moving base system and the position servomechanism is described. Computer simulation is used to find the frequency and time-domain Characteristics of the control system. The simulation results are acceptable but it must be emphasized that these have been reached with several
simplifying assumptions. Hence, practical tests must be performed to evaluate the suggested control system.
UTVECKLING AV KÖRSIMULATOR. PrOjektbeskrivning
Vid institutet_har man sedan länge arbetat med att
för-bättra samspelet mellan förare, bil och väg. Här finns dock många angelägna problem, som enbart kan studeras
fi en förhållandevis komplicerad körSimulator. Någon
lämplig sådan finns inte kommersiellt
tillgänglig..Där-för utvecklas nu vid VTI en körsimulator tillgänglig..Där-för manöver-dynamisk forskning.
Simulatorn kommer bl a att kunna utsätta försöksperso-nerna för realistiska, väl specificerade och
repeter-_bara trafiksituationer. Genom att körprestationen också
registreras i detalj bör det vara avsevärt lättare än
i verklig trafik att urskilja skillnader mellan de
olika åtgärder som jämförs (t ex inom förarutbildning,
fordonskonstruktion eller Vägunderhåll).
Körsimulatorn kan indelas i fyra delsystemg
Förarplats avskild från laboratorierummet
med-manö-verorgan, instrument samt fyra högtalare för motor-, vind- ooh däcks/vägljud.
Visuell omvärldspresentation. Central färgbild
(i 20 á 250 horisontellt) tas upp från modellandskap
'med servoStyrleV-kamera och projiceras på kabin-väggens insida. Som komplement kan man utnyttja skuggprojektion från servostyrda ridåer med mönster som.antyder vägbana, terräng och himmel för att kör-hastighet, gir- och krängrörelser skall kunna
urskil-jas med det perifera seendet.
Rörelsesystem. De krafter som påverkar förarens
YH AG ÄH Ãq 33
och girrörelser simuleras genom att kabinen vrids
i olika riktningar. Som exempel kan en känsla av
konstant retardation åstadkommas genom att en del
av tyngdkraften är riktad framåt då kabinen lutas enligt figuren.
Datorsystem. Med hjälp av specialutvecklade program
beräknar VTIs hybriddator (EAi Pacer 600) hur ratt-motstånd, ljudeffekter, visuell presentation och
kabinrörelse skall påverkas av försökspersonens manövrer. Inga märkbara tidsfördröjningar får upp-träda. Fordonets egenskaper, vägfriktionen etc kan varieras av datorn mellan eller under försöken. Utvecklingen sker med hjälp av medel, som ställs till förfogande över transportforskningsdelegationens budget, samt med institutets medel för egen FoU. Arbetet redo-visas successivt i institutets dokumentserier under den
.gemensamma rubriken "UTVECKLING AV KÖRSIMULATOR".
RÖRELSER FÖR TV-KAMERA OCH OMVÄRLDSBILD
HYBRID DATOR EAI PACER 600
._J
\\;;:;;\\ -»PERIFER SKUGGBILD_...KABINRÖRELSE
.
L_.,RATTMOMENT, INSTRUMENT,
,4- MANÖVERORGAN.
LJUD
Sammanfattning
I föreliggande rapport föreslås en styrstrategi för rörelse-systemet till den körsimulator som nu utvecklas vid Statens väg- och trafikinstitut.
Körsimulatorns rörelsesystem avser att ge simulatorföraren de karaktäristiska accelerationsupplevelser - baserade på kraf-ter - som motsvarande reella kördynamiska situation medför. För detta utnyttjas primärt två s k vridningsrörelser dvs
kabinen roteras omkring två vinkelräta axlar, som båda befinner
sig i ett plan vinkelrätt mot förarens ryggrad. De kraft-komponenter i detta plan, som uppkommer pçga gravitation och vridningsvinkelacceleration, får då motsvara de horisontella tröghetskrafterna vid fartändring och kurvkörning. Positions-servosystem utgör den tilltänkta styrutrustningen för vridnings-rörelserna. Rapportens innehåll sammanfattas nedan.
Kapitel 1 behandlar en härledning av den skenbara
accelera-tionen i en punkt i förarkabinen. Denna härledning görs först generellt för ett rörelsesystem med vridningsrörelse,
linjär-rörelse samt girvinkellinjär-rörelse. Senare beskrivs ett förenklat
rörelsesystem, som enbart har vridningsrörelser. Det är detta rörelsesystem som nyttjas vid den fortsatta behandlingen. Kapitel 2 beskriver en linjär modell av de positionsservo-system som avses att användas för rörelsepositionsservo-systemets vridnings-rörelser.
Kapitel 3: Med hjälp av stegsvars- och frekvensanalys studeras de dynamiska samband som råder mellan positionsservosystemets insignal och den skenbara accelerationen. Frekvensanalysen visar en amplitudnedgång och en fasavvikelse i en omgivning till den
så kallade pendelfrekvensen. Översatt till en körsituation be-tyder amplitudnedgången att "slalomåkning" med denna frekvens
skulle innebära utsläckning av den skenbara accelerationen. Fasavvikelsen kan innebära att den skenbara accelerationen
I kapitel 4 förkastas två typer av styrstrategiidéer som vid första anblicken kan verka meningsfulla.
Under kapitel 5 dimensioneras statisk och dynamisk kompense-ring av styrsystemet för simulatorns rörelser.
Den statiska kompenseringen innebär en omräkning av accelera-tionsbörvärdena till positionsservosystemens börvärden. Den dynamiska kompenseringen utgörs av 5:e ordningens filter som
filtrerar insignalerna till positionsservosystemet. Filtren
minskar påtagligt frekvensområdet med amplitudnedgång och fas-avvikelse.
Kapitel 6 ger simuleringsresultat erhållna med en digital-datormodell av rörelsesystemet. Därvid utnyttjas de kompense-ringsfilter och den modell av servosystemet som framgår av kapitel 5 respektive 2.
Som framgår av kapitel 6 ger simuleringsresultaten ett godtag-bart intryck. Det bör dock betonas att resultaten värderats
utifrån flera osäkra antaganden. Det antas att accelerationsupp-levelsen enbart beror av den skenbara accelerationen
beräk-nad för en punkt i krOppen. Dessutom har linjära modeller an-satts för servosystemen som styr simulatorkabinens vridnings-vinklar.
I det fortsatta projektarbetet bör den styrstrategi som här föreslagits testas praktiskt. Dessa prov kommer att visa om det föreslagna styrsystemet är användbart.
INLEDNING
De accelerationer som en förare normalt upplever vid bilkörning kommer att efterliknas med hjälp av körsimulatorns rörelse-system. De accelerationsriktningar, pç;a bilens rörelser, som
är aktuella vid bilkörning på plant underlag består
väsentli-gen av accelerationen i bilens längd- och tvärled samt gir-vinkelaccelerationen.
Genom linjärrörelse och vridningsrörelse av simulatorkabinen är det möjligt att åstadkomma en skenbar acceleration som motsva-rar accelerationen i fordonets längd- och tvärled.
Linjärrörelsen innebär en translatorisk rörelse av simulator-kabinen. På grund av att de accelerationer som förekommer i verkligheten kan verka under relativt lång tid med höga acce-lerationer (jfr cirkelkörning i rondell), måste ren linjär-rörelse slopas som linjär-rörelsesystem. Simulatorn skulle i så fall kräva stor plats och härtill måhända bli lika farlig som vanlig bilkörning.
Vridningsrörelsen av simulatorkabinen sker omkring två vinkel-räta axlar, som båda befinner sig i ett plan vinkelrätt mot förarens ryggrad. De kraftkomponenter i detta plan, som upp-kommer pç;a gravitation och vridningsvinkelacceleration, får då motsvara de horisontella tröghetskrafterna vid fartändring och kurvkörning.
Positionsservosystem utgör den tilltänkta styrutrustningen för linjärrörelsen och vridningsrörelsen.
Girvinkelaccelerationen avses att simuleras med en rotations-rörelse omkring en axel som sammanfaller med förarens ryggrad. Reglering av girvinkelaccelerationen kommer ej att ingå i
denna studie.
Principer för uppnående av sidacceleration med linjärrörelse
och vridningsrörelse framgår av figur l.l (jfr ref (2)). Vid
vridningsrörelse kommer den skenbara accelerationen att beräk-nas i en vald punkt (P) i simulatorförarens kropp (jfr ref
M OT S V A R A ND E K ÖR S IT U A T I O N S I M U L E R A D M E D V R I D N I N G S R ÖR E L S E V E R K L I G K ÖR S I TU A T I O N
D
i?
n
u
"
gs ind> +R <bSA
M
M . F i g 1 . 1 V er k l i g o c h s i m ul e r a d s i d a c c e l e r a t i o n . M O T S VA R A N D E K ÖR S IT U A T I O N S I M U L E R A D M E D L I N JÄR R ÖR E L S Ei
r e f [6 ].I föreliggande rapport har reglerproblemet för vridningsrörel-sen formulerats på följande sätt för simulering av
sidaccelera-tion:
Styr körsimulatorkabinens vinkel $(t) så att R$(t)+-g sin($(t)) motsvarar den önskade sidaccelerationen (SA). Se figur l.l. Detta reglerproblem kommer att behandlas speciellt då den acce-leration som ska simuleras har komponenter både i fordonets längd- och sidled.
De reglertekniska krav som ställs på rörelsesystemet kan inses med hjälp av nedan givna förenklade blockschema.
FÖRARE
/_\
RÖRELSE- LJUD_ MANÖVER- VISUELLT
SYSTEM SYSTEM ORGAN SYSTEM
FORDONS-MODELL
Fig 1.2 Blockschema föreställande föraren i körsimulator-systemet
Som framgår av blockschemat är rörelsesystemet ett block i
den lOOp som dessutom omfattar förare, manöverorgan och fordons-modell. Denna situation ställer krav på fasriktighet hos rörel-sesystemet. En exempelvis negativ fasvridning hos rörelsesyste-met kommer att upplevas som en tidsfördröjning.
Inertialsystem
Härledning av skenbara accelerationen
Under denna rubrik härleds skenbara accelerationen i ett rörelsesystem som har vridningsrörelser i längd- och tvärled, överlagrad linjärrörelse i tvärled samt girvinkelrörelse. Alla dessa frihetsgrader för att få en så generell modell som möjligt. Den överlagrade linjärrörelsen i tvärled har tillkommit för att undersöka möjligheten att komplettera vridningsrörelsen i ett frekvensintervall där denna sätts ur spel. Eftersom girvinkel-rörelsen (W) kan ge upphov till oönskade accelerationskomponen-ter medtages denna i den matematiska modellen.
Figur l.3 visar de olika frihetsgraderna och rotationsaxlarnas inbördes placering enligt nuvarande planer för rörelsesystemet. För att ge en enkel beskrivning tilldelas varje frihetsgrad ett medföringskoordinatsystem. Föraren befinner sig i det
I,
W
HI
,/
RQ
Körsimulatorns koordinats stem och vridningsaxlar
samt w. Från ref.
6).
Fig 1.3
ll
simulatorkabinfixa koordinatsystemet (Plevn.
Accelerationer i fordonets tvärled (v riktning) simuleras
med vridningsvinkeln @(t) och genom linjärrörelse av punkten 0 i inertialsystemets v' 'riktning. I fordonets längdled (u rikt-ning) nyttjas vinkeln 6 för att ge accelerationsstimuli. Kabin-girvinkelrörelsen (w riktning)sker omkring en axel som samman-faller med förarens ryggrad i enlighet med med figuren. Kabin-girvinkeln (benämnes w) och dess tidsderivator påverkar acce-lerationen 1 punkter som icke faller utefter w-axeln. Kabingir-vinkeln påverkar också komponentuppdelning av @- och 6 rörel-serna utefter u och v axlarna.
Aktuella vektorer kan uttryckas med komponenter i de olika koordinatsystemen. För att göra transformationen av vektorer mellan olika koordinatsystem enkel utnyttjas
transformations-matriser (se ref (4)). Nedan presenteras transformations-matriserna A, B och C
samt vilka transformationer de utför. Ekvationsuppställningen
ska tolkas så att matrisen A Opererande på en Vektor uttryckt
1 (' W -systemet ger samma vektor mennu med sina komponenter
uttryckta i(")-systemet osv. I den fortsatta behandlingen kommer beteckningen [: j"att avse en vektor vars komponenter
uttrycks i (")-systemet. f l 0 O = 0 coso sino O -sin$ coso \ r 1 A cose 0 -sine = 0 l 0 sine O cose k_ W j B cosw sinw O = -sinw cosw O 0 0 1 C
Eftersom matriserna A, B och C år ortogonala fås derasinvers-matriser A_l, B_1 och C_1 genom matristransponering.
Således
;fl = AT
B-l:= T
Detta medför att man med enkelhet exempelvis kan uttrycka
en vektor i (" 7-systemet cmlden finns uttryckt i (")-systemet.
4,/ l 0 O = cosö -sinö O sinö cosö L
Äf-' cose O sine I = 0 l 0 \_-sine g_ cose J BT I cosw -sinw = sinw cosw 0 L 0 0 l 1 CTOrtsvektorn till punkten Q kan allmänt uttryckas som en summa vektorer.
RQ=rO+rD+rP+rQ
Om vektorerna uttrycks i de koordinatsystem där detta enklast
låter sig göras fås följande vektcr äQ uttryckt i ("')-systemet.
._1,' u i_øø 0 _f 0 _. q
rO = rV , rD = 0 , rP = 0 , rQ =
rw d -R
O
-R sine
AT BT ?P =
R sind) cose
-R coso cosO q cosw 0089
T T T- . . .
A I3 C 1: =
Q
q Sinw cos$+-q cosw Sine s1n$q sinw sino-q cosw sine coso
,få
Därav vektorn ?Q
ru-R sin64-q cosw cose
E = rV-d sin$+-R sino cosG+-q sinw cos$+-q cosw sine sino
rw4-d coso-R coso cose+-q sinw sino-q cosw sine cos$
få,
Vektorn ?Q kan tecknas med funktioner fi.
,Il
fl
Ii = f2
f3
,fl
Eftersom ortsvektorn §Q uttryckts i inertialsystemets
koordi-nater erhålles accelerationen genom tidsderivering av vektor-komponenterna.
,lf
lf,
O
M-Iå
Q- 15
Y+
0
där M==den rörliga massan och Fy = resultanten av yttre
krafter exklusive tyngdkraften verkande pånwssan M i punkten
där CBA
Ekvationen kan skrivas på formen
O
MR
(Q
+
0
)
:F
y
g
Om de i kraftekvationen ingående vektorerna transformeras till
simulatorförarens medföringssystem fås
M-'Ã= Fy
. 0
där A=§Q+CBA
0
9
Vektorn à representerar således den skenbara accelerationen
Vektorn à är resultat av matriSOperationen A
_
:3"
u
A==CBA (RQ + ) = A
9 AW
(coswcose) (coswsinesin$+sinwcos$) (-coswsinecos$+sinwsin$)
= (-sinwcose)(-sinwsinesin$+coswcos$)(sinwsinecos$+coswsin$)
(sine) (-cosesind) (cosecosd)
0 A"'
:øøa u
och RQ + 0 = A"'V
g
AW
,,, .. " -2 . .. _ .2
Au = r -R (6 cose-Ou Sln6)+-q (-w Slnw cose-w cosw cose
Aç"= fV-d (E13 0054)- 432 sincb) +R (45 0054) 0056 - 452 51n4> 0056+
-4 é 0054) sin6) + R (-'é sin4> sin6 - é 4 00543 sin6 - éz sin4> 0056)
+q (43 00511) 0054) - ILZ sinw 0054) -
00511) 5in4>) +q (-45 simp 51n4>+
- 4> 00511) sin4> - (12 sinxp 0054)) + q (-4) simp sin6 sin4>+
-1112 00511) sin6 sin4b - sinxp 0056 sin4> - simp sin6 0054)) + +q (6 005111 0056 sin4> -611Jsin1p 0056 5in4> - 62 0054) sin6 sin4>+
+6 0054) 0056 0054)) + q (45 0054) sin6 00545 - simp sin6 0054) +
+4) 00511) 0056 00545- 02 COSIP 51119 51114»
Agl"= 'fw-d (45 sin4 + (12 0054)) - R (-45 sin4 0056+
+42 0054) 0056 + 51 é sin4> sin6) - R (-25 0054) sin6 + (9 4; sin4> sine +
-62 0054) 0056) + q ((1) cosw sin4> - 1122 simp sin4> + 0054) 0054)) +
+q (43 simp 0054>+ 00511) 00543 - (12 sind) sin43) - q(-{135in11 sin6 0054 +
-1112 00511) sin6 0054) - sinw 0056 0054) + simp sin6 sin4)) +
-q (6 00511) 0056 0054) -611 sin41 0056 0054)- 62 00511/ 51116 0054>+ -6<1 00511) 0056 sincb) -q (-43 00511) sine sin43+
lO
Förenklad rörelsesystemmodell
Den i föregående avsnitt behandlade rörelsesystemmodellen hade förutom vridningsrörelser även linjärrörelse i sidled och gir-vinkelrörelse. I detta avsnitt ges en förenklad rörelsesystem-modell. Modellen har enbart vridningsrörelser. De ekvations-underlag som framtagits för ovan nämnda rörelsesystem kan nyttjas för den förenklade rörelsesystembeskrivningen under
förutsättningen: w==0, Eb==0.
Dessutom väljes koordinaten q==O.
Vektorn för den skenbara accelerationen blir därmed:
FAu_
P-Rä+å 2(d-Rcos6)sine-gsin6cos<bn
AV
=
-215(d-Rcos e) - 2R<1>ê sine+gsinq>
AW _RÖ2-$2(d-Rcose)cose+gcosecoscbJ
L
4
ll
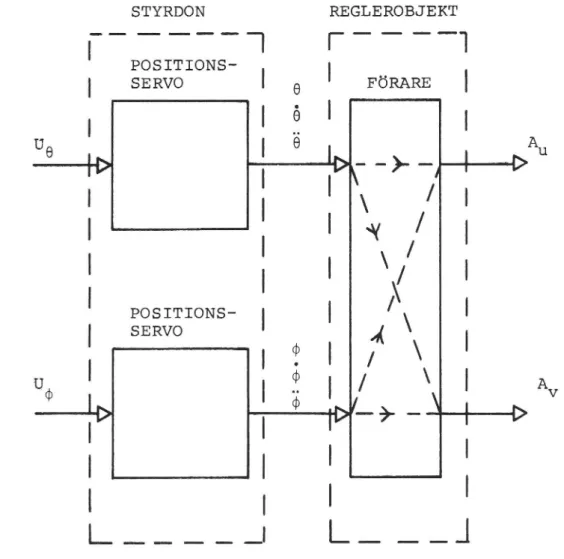
STYRDON FÖR RÖRELSESYSTEMET
De styrdon som avses att användas för att ge simulatorföraren accelerationsupplevelser utgöres av positionsservosystem. Servo-systemen kan vara av hydraulisk eller elektrisk typ. Under an-tagandet att accelerationsupplevelsen skall åstadkommas med enbart vridningsrörelser fås en blockschemabeskrivning enligt nedan givna figur. Två positionsservosystem avser att vrida
simulatorkabinen vinklarna 6 och $ för att ge intryck av
acce-leration i fordonets längd! och sidled. Den skenbara accelera-tionen i vardera riktningen är en olinjär funktion av vinklarna 9 och $ samt dessas derivator.
STYRDON
REGLEROBJEKT
|' _ _ _ __7
F'"'__l
POSITIONS- ||
SERVO
e
FÖRARE
l
l
63
|
|
U
ö
A
POSITIONS-SERVO12
Modell av servosystemet
Den modell av servosystemet,som presenteras här,är linjär.
Rörelseekvationen för en roterande motor beskrivs av ekvationen: 2
W+f.éil2l
2 dt
dt
J. = K.ux(t)
I ekvationen är J summan av motorns och lastens masströghets-moment, f den hastighetsberoende dämpningen och K-uxft) det Jdrivmoment som pålägges motoraxeln. K är konstant och ux(t) är
den insignal som styr motorns vridningsvinkel y(t). Eftersom simulatorns tyngdpunktsläge på grund av geometrin sannolikt förändras tillkommer ett av vinkeln beroende återföringsmoment. Av samma orsak blir masströghetsmomentet J hos det ena vridnings-systemet beroende av det andras vridningsvinkel. Dessa effekter negligeras i denna betraktelse.
Om vridningsvinkeln återkOpplas fås ett positionsservosystem. ux(t) = u(t) - Ht)
där u(t) är den vridningsvinkel som servosystemet borde anta (börvärdet).
Det återkOpplade systemet får därmed en dynamik beskriven av ekvationen:
2
J. gillål + f. QXÅEÅ + K.y(t) = K.u(t)
2 dt
dt
Dynamiken hos denna andra ordningens differentialekvation karaktäriseras av det odämpade systemets vinkelfrekvens (wo) och den relativa dämpningen (ç).
13
Luz/.Ii- çzl. f
o J ' 2 K-J
Dessa symboler ger servot följande beskrivning: 2
d 1(t)dtz + 2; mo dy(t)(ü: + woy(t)2 = wo2 u(t)
Stabiliteten hos det återkopplade systemet säkras om realdelen
av rötterna till den karaktäristiska ekvationen är negativa. Om relativa dämpfaktorn ;5:l.O fås ett insvängningsförlOpp utan översläng vid stegstörning. Systemets responssnabbhet är beroende av såväl ç som wo
Eftersom motorns förstärkning K ofta är den enda parameter som kan varieras blir relativ dämpning given när wo fixerats, ty J och f är konstanter som ej fritt väljes. För att möjlig-göra val av relativdämpningen ç kan en styrlag av följande typ nyttjas:
u*<t :u(t) - (ut) + 8- Mm)
Insatt i motorekvationen fås: 2
J g-Iéål + (f4-Ke) g%á§l + Ky(t) = Ku(t) dt
Relativdämpningen c och odämpade vinkelfrekvensen wo blir därmed
00 = 5. :l <f+I<°e
o
J
'C
2
7K-J
varur framgår att även relativdämpningen ç kan väljas. Denna styrlag innebär att man med hjälp av tachogenerator skattar motorns vinkelhastighet ?(t).
14
Överföringsfunktionen uttryckt i g och wo för
positionservo-systemet kan tecknas som 2
0 F(s)=
15
STYRDONETS OCH REGLEROBJEKTETS DYNAMIK
I detta kapitel studeras de dynamiska samband som gäller för servosystemet och den skenbara accelerationen. Studien avser enbart accelerationer som åstadkommes med vridningsrörelser. För att finna de karaktäristiska dynamiska egenskaperna stude-ras den skenbara accelerationen enbart i fordonets sidled, därtill linjäriseras uttrycket för den skenbara acceleratio-nen .
Enbart rörelse i fordonets sidled, ingen linjärrörelse samt avsaknad av girrörelse.
6:0,
ro
=Ooch1p=0
Den skenbara accelerationen i v riktningen blir därmed.
AV==- $(d-R) + g - sin o
Med antagandet att <i==()och sin oxo fås ett linjärt uttryck för accelerationen.
= ..+
AV
Rv
g$
I tidsform kan sambandet mellan insignalen (Uw) till servo-systemet och den skenbara accelerationen tecknas
.. . 2 _ 2
$+-2C wo $+-wO$-wo U$
AV=Rd>+gd>
Frekvensanalys
I blockschemaform uttryckt med Laplace Operatorn fås följande beskrivning av ekvationssambanden.
16 U$( )5 wo2 ®(s) 2 AV(s)V 2 2 Rs +-g > 5 -+2çw s-Fw . . H 0 o vridnings- skenbar vinkel acceleration Således (R524-g) må AV(S)= - U$(s) 52+-2çw s+-w2o 0
Eftersom uttrycket ovan är linjärt låter det sig lätt frekvens-analyseras. Kurvbladen l, 2 och 3 visar överföringsfunktionens frekvensegenskaper vid variation av parametrarna R, ç och wo Samtliga diagram visar en nedgång i amplitud i intervallet l-lO rad/sek. Nedgången i amplitud förklaras av överförings-funktionens täljaruttryck. Vid frekvensen w=wfg7 som för övrigt är den fria pendelfrekvensen, blir täljarens belOpp lika med noll. Översatt till en körsituation innebär detta att "slalom-åkning" med denna frekvens skulle innebära att den skenbara accelerationen utsläckes.
Genom att välja negativa värden på variabeln R elimineras
amplitudnedgången vid pendelfrekvensen. Stegsvaret kommer dock att ge felaktigt tecken i initialskedet om R väljes negativ vilket ej kan tolereras. (Negativa R innebär att rotations-centrum placerats under simulatorföraren).
Överföringsfunktionen har dessutom en fasvinkel som avviker från noll i en omgivning till pendelfrekvensen. Fasavvikelsen betyder att den skenbara accelerationen kan försenas eller ti-digareläggas i förhållande till visuella stimuli. Detta kan en-ligt ref (7] vara ett allvarligare fel än amplitudnedgången. Den nedan beskrivna kompenseringen strävar i hög grad till att
l7
Kurvbladen l, 2 och 3, som åstadkommits i dator med hjälp av
ett program enligt ref [8], ger dessutom följande information: Kurvblad l.
Amplituden vid höga frekvenser är beroende av servosystemets gränsfrekvens. Hög gränsfrekvens hos servosystemet ger hög
amplitud vid höga frekvenser. Dessutom blir fasavvikelsen större ovanför pendelfrekvensen än under. Vid låga gränsfrekvenser
hos servosystemet fås motsatt resultat.
Kurvblad 2.
Som framgår av diagrambladen så gäller amplitudnedgången i en
omgivning till pendelfrekvensen. Kurvblad 2 visar att frekvens-intervallets storlek beror av servosystemets relativa dämp-ning ç. Ju lägre relativdämpdämp-ningen väljes ju mindre frekvens-intervall berörs av amplitudnedgången.
Kurvblad 3.
Amplituden är dessutom beroende av pendellängden R. Höga frek-venser får en amplitud som ökar med R.
19
ast-*lll-p---I=l..hN 3 g 135 RSS 6 8 :L138 nac.c I 1.6
:e
se
II LM (W) (M5) 6 45 \ A -10 H 0 'iäüuääääN.28
\
-43
_30 -99..
o
1
2
C 18 10 10 H (RÅ'FF) Rss G MO " 31133 ggg G R 8 1.000 10 N32'" 8
.2%
(De) (BEG) a 45 E, ÅS.19
|
h""'
0
.33 '99 - g 1 2 16 10 26 19 H (RåZfC) KURVBLAD 2
Bodediagram för styrdonets och r_ i eglerobjektet d namik vid
20 653 [1 a 9 313 133
57:23 L:
m a
3.139
m 6
r ' R 3 14 L SE" 8 1.930 (83) (DEC)\
'60 '90 "1 G 1 2 19 18 10 18 H (RÅD/S* 28 F4.: _ 5 a: EBEHB 90
:53 G
9
om: a
R
3
.5%
8
45
i* 3 LW (UB) (085)-20
\
0
*\
EJ \ A *48 \\ .45 .gg \\\ -99 -86 .-133 " :Q 1 2 18 113 10 19 H (RRD/3) KURVBLAD 3Bodediagram för styrdonets och r. . ele '
21
Stegsvarsanalys
Den frekvensanalyserade överföringsfunktionen (RsZ+-g) w2
A(s)=
0
-U (5)
V 52+-2çw s+-w2 ®
0 O
uppvisar vid stegsvarsanalys beroenden av parametrarna R, C och wo. Stegsvar vid variation av dessa parametrar framgår av kurvbladen 4, 5 och 6. För samtliga stegsvar gäller
U®(s)==l/s.
Med hjälp av begynnelse- och slutvärdesteoremen för Laplace-transformerade uttryck kan stegsvarets karaktär beräknas. Begynnelsevärdesteoremet ger:
(Rszi-g) må l
lim A (t)==lim s-A (s)==lim s- -- (enhetssteg)
v v s +-2çw s+-w2
t-*O s- 00 5-*00 o 0
= szo
Slutvärdesteoremet ger:
(Rsz+-g) må l
lim A (t)==lim s-A (s)==lim S' --==g
V V 5 +2çws+w28
t- oo s+0 S-*O O O
Dessa resultat åskådliggöres med grafen:
AV(t) A
\ 7
Rw2o
9
t
Stegsvarets begynnelse- och slutvärde är oberoende av Q. Parametern ç påverkar emellertid insvängningsförloppet jfr kurvbladen 4, 5 och 6.
w Avüd q m M u m 10 s / R=O.5 5 1/ m :313 0 4 C=1Å)
Z[
06 1 5 5 T(S) ä 7 /m Mm s )
16 H 12 to j///fø e / = 6 / RIJO \ 1/ wJBLL 4V
z;=1.0
2 °e 1 5 5 T(S> 29 18 AV(m/s ) 16 14 m 10 ////, s/
1 ._
6 i I* R-1.5 X /7 w=3L3 4 0V
ç=1.0
2 80 1 5 6 T{S) KURVBLAD 4Stegsvar vid variation av pendellängden R.
23 H
[2
X
,0
\/\,_
1 \ / v
M
8l
R=1.0
5 I w=5 i o 4ç=0.2
2 V
Tis)
a 1 2 3 4 5 5 m a 23 Av[m/S ) 16 0--14 r-'.2. 18 in ______ ä. R=1.0 5 b _ w=313 4 m_ 0 C=O.2 z __ 66 1 2 3 4 S 5 IKS) KURVBLAD 5Stegsvar vid variation av servosystemets gränsfrekvens,
16 AV(m/s ] 24 14 12 18
/
R=1 .0
6 ?O . V C= 1 ._ O2
*
AV(m/s ) 18 16 u 12 10 // R=1.0
4 \
0053.13
V
ç=1.0
2 29_ V(m/SÄr-) 18 . 4 16 P H 12 18
/pf
8 //
G/
w=5.0
4 i A 0\ /
He
2 V8
63 1 2 3 4 5 bvs)
KURVBLAD 6Stegsvar vid variation av servosystemets gränsfrekvens, hög dämpning.
25
REGLERTEKNISKA BEGRÄNSNINGAR
Med hjälp av ovan framtagna blockschema som beskriver det
dynamiska sambandet mellan insignalen till positionsservot och den skenbara accelerationen kan två reglermetoder förkastas. Den första metoden att komma tillrätta med amplitudnedgången och fasfelet i intervallet omkring pendelfrekvensen kan sken-bart erhållas om servosystemets dämpning väljes lika med noll.
U (5)
$
2 $(S) A (5)m
0 \ Rszá-g
2 2
s +-2çwos+-wo
Om dessutom servosystemets egenfrekvens wo väljes lika med pendelfrekvensen fås en överföringsfunktion som är konstant
oberoende av frekvensen. Detta resultat måste förkastas eftersom det innebär att servosystemet blir icke asymptotiskt stabilt. Denna typ av styrning leder till odämpade oscillatoriska sväng-ningar av simulatorns rörelser.
Den andra metoden bygger på återkOppling av accelerationen. Därvid tänkes accelerationsbörvärdet jämföras med den i simula-torn uppmätta translatoriska accelerationen. På basis av denna jämförelse beräknas en strategi för styrning av servot.
T
Avbör L® $(s) AV(S)
---a Regulator Servo Förare 7
(Rszä-g) må
AV(S)== 2 2 - U®(s)
s +2çw s+w
26
Detta försök till reglering av simulatorns rörelsesystem
förkastas med hjälp av sats 5.1 i ref (5). Enligt denna
sats kan systemets poler ändras godtyckligt medan dess
nollställen förblir oförändrade efter en linjär återkOppling av servots vinkel, vinkelhastighet och vinkelacceleration. Således går täljaruttrycket, som gav upphov till
amplitudned-gången och fasfelet,ej att förändra med denna metod.
Möjligheter att förbättra frekvensegenskaperna i en omgivning till pendelfrekvensen
I enlighet med ovan givna reglertekniska förklaring existerar ingen återkOppling som ger förbättrade frekvensegenskaper. I detta avsnitt diskuteras möjligheten att förbättra frekvens-egenskaperna genom införande av:
a) överlagrad linjärrörelse hos rörelsesystemet b) kaskadkompensering
Överlagrad linjärrörelse
Inledningsvis lepades tanken på att åstadkomma acceleration
enbart med linjärrörelse av körsimulatorn. I referens (2 ]
diskuteras olika möjligheter att kombinera linjär- och vrid-ningsrörelser för att åstadkomma accelerationsupplevelser. I detta fall skulle linjärrörelsen ge bidrag i det frekvens-intervall där vridningsrörelsen har sin amplitudnedgång.
i? I
<-4
a 27 Förare Bdan pass- L't"injär y r \ ä filter ü servo ccb" orv ____, acc 1 Bandspärr- Vridnings- $ aWfilter aservo i .b-___
Fig4.2!Blockschema för styrsystem av vridningsrörelse med över-lagrad linjärrörelse.
I Bodê diagrammet innebär detta följande för accelerations-amplituden. acc (vridning)
IR
Wu,
acc (linjär)m
acc (total)'///////I////////////
;(1)Ett antal simuleringar har gjorts som bekräftar att detta är en framkomlig väg. Denna metod kräver dock flera frihetsgrader och en påtaglig ökning av komplexiteten i rörelsesystemet och
får därför anstå tills vidare. Kaskadkompensering
Det system som skall styras har en dynamik som i förenklad form kan tecknas med följande överföringsfunktion.
28 2 2 (Rs 4-g) wo 2 A (s)= 2 s +-2çw s4-wo 0 V
Enligt ovan presenterade Bodediagram har överföringsfunktionen
en nedgång i amplitud och en fasavvikelse i en omgivning till
pendelfrekvensen. Med hjälp av ett filter i kaskad med servosystemet är det möjligt att minska det frekvensområde inom vilket denna amplitudnedgång och fasvinkelavvikelse gör sig gällande. Denna metod kommer att utnyttjas i det följande.
29
KOMPENSERING
Detta kapitel behandlar statisk och dynamisk kompensering av reglerobjektet. Den statiska kompenseringen avser en omvandling av de ur fordonsmodellen hämtade accelerationsbörvärdena till signaler som motsvarar servosystemens vinkelbörvärden.
Vinkelbörvärdena (U$, U6) beräknas på sådant sätt att den
sken-bara accelerationens g beroende komponenter överensstämmer med börvärdesaccelerationen.
Den dynamiska kompenseringen har tillkommit i syfte att minska det frekvensområde inom vilket styrdonet och reglerobjektet uppvisar fasvinkelavvikelser och amplitudnedgång.
A D Y N A M I S K S T Y R D O N K O M P E N S E R I N G
7
r_
"
""
7
e F I L T E R 'b ör ' 5 : e O R D N I N G E N S T A T I S K K O M P E N S E R I N G[_
__
__
__
.
P O S I T I O N S -S E R V O | A . . | . ub o r I a r 0 5 1 n ( R E G L E R O B J E K T7
"
"
"
7
S I M U L A T O R -F ÖR A R E ub ör g c o s ( $ b ör I D, I é> P O S I T I O N S -S E R V O F I L T E R 5 : e O R D N I N G E N ör Tl
l
II
ll
II II áb
l ||
'6-'9-:9-l a r c s i n ( A V b Ör ) |{
I
I
9
I
I
I
I
I
I
I
I
I
L_
_.
..
..
._
__
__
__
..
__
_1
L_
__
_.
..
__
__
__
__
J
L.
_.
__
._
_.
__
__
I
F i g 5. 1 D e t k o m p e n s e r a d e r ör e l s e s ys t e m e t 3031
Statisk kompensering
Ur de förenklade resultaten vid beräkning av den skenbara
accelerationen-kan följande statiska komponenter urskiljas.
Austat.==-g-Sin63cos$ Avstat. z g°Sln 4)
De vinkelbörvärden som positionsservosystemen bör anta kan
teck-nas på följande sätt:
Avbör obör==arcsin (---)
A..
6b" ==arcsin (or g-cos($bör)Ubor )
I uttrycken betyder Avborn och Aubor" accelerationsbörvärden i fordonets sid- och längdled, dessa variabler hämtas ur fordons-modellen. Som framgar av uttrycken blir Gbör beroende av obör.
I de simuleringsresultat som presenteras i kapitel 6 studeras denna koppling.
Dynamisk kompensering
Vid den dynamiska kompenseringen har den linjära dynamik som beskriver sambanden mellan servosystemets insignal och skenbar acceleration utnyttjats.
(Rsz+g) må
AV(s)= 2 2 - U®(s)=Gp(s)-U$(s)
s+2ws+
CO wO
Idêen har varit att finna ett kompenseringsfilter som i frekvens-planet förbättrar fas- och amplitudgång i en omgivning till
pendelfrekvensen. Dessutom har filterkravet gällt att ge syste-met ett stegsvar sådant att slut- och begynnelsevärdena blir identiska.
Sambandet mellan filterinsignalen och upplevd acceleration blir nu
32
A (s)==Gk(s)-G
V
(s) øbör(s
PI uttrycket är Gk(s) kompenseringsfiltrets överföringsfunktion. Av pedagogiska skäl delas filtret i två kaskadkOpplade delar.
Gk(s) = Gl (s) -G2(s)
Gl(s) avser att uppfylla det krav som ovan ställts i tidsplanet. G2(s) kommer att kompensera systemets brister i frekvensplanet. Med slut- och begynnelsevärdesteoremet kan Gl(s) egenskaper
skisseras för att klara stegsvarskravet.
lim Av(t)==lim s-Av(s)==Gl(O)°G2(O)°g
t-*w s-*o
' -' - 00 00002
lim Av(t)-lim s Av(s)-Gl( ) G2( ) R wo
t-*O 5-*00
Om G2(o) Väljes lika med G2(w)==l fås följande krav på Gl(s)
G (0)- ==G (w R 2
1
9
1
0
Den enklaste typ av filter som uppfyller detta krav är av första ordningen.
__C-54-D Gl(s)_'E-S4-F
2
o
33
=:0.06 s-+l
s-+l
Således filtret Gl(s)
uppfyller stegsvarskravet.
Den totala överföringsfunktionen exklusive G2(s) förändras vid frekvensanalys på det sätt som framgår av kurvblad 7.
Kurvblad 7 visar Bodediagram för överföringsfunktionen
2 2
CS+D
(RS +9) wo
ES* F 52+-2çw s+-w2o o
Parametrarna R, c, wo, D, E och F har valts som ovan, medan C har antagit värdena l resp 0,062. Värdet C==l är liktydigt med ingen filtrering alls. Av kurvblad 7 framgår att fas- Och
belOppskurvorna efter inkOppling av det beräknade filtret Gl(s) antar en symmetrisk karaktär omkring pendelfrekvensen.
69 ;E I SLBU! 130 34
0
nns 0
c
135
R
(oss)
90
A
45
e
.43 a -45-1
0
1
2
16
m
18
10 H
(matig)
29 i A a_ a CDQ$Q ! 135 83 G 1 3 12.433 ägg 6.662
a
4
c
-
99
Lem
(M)
(08
mm
"29
-1-.eee--- *5
a
A
_48
1.000 an-u 9
5*\-sa
"45
-33 '63-
0
1
2
121
se
16
19 H
cam/m
KURVBLAD 735
Filtret G2(s) bör väljas fasavancerande för frekvenser i ett område under pendelfrekvensen och fasretarderande i
ett område över pendelfrekvensen.
Samtidigt måste det krav som ställdes på G2(s) vid
dimensio-neringen av Gl(s) uppfyllas dvs G2(o)==G2(w)==l
Ett flertal filtertyper uppfyller detta krav. Här har ett 4:e ordningens filter valts.
2 2 2 2
(S *'251 015*' 01 (s *'253wo3s*' o3
G (5):2 2 2 2 2
(s +-2ç2w0254-w02) (s +-2ç4w0434-w04)
Kurvblad 8 visar Bodediagram för detta filter när filtrets
parametrar antagit följande värden.
Cl=ç2=ç3=ç4=006
=9.8l, w =3.27
:1.0, =.3.0, w03 04
01
02
Som framgår av Bodediagrammet har filtrets amplitudkurva en
förstärkande egenskap i intervallet strax över och under pendel-frekvensen. Detta passar bra eftersom reglerobjektet har en
amplitudnedgång i detta intervall.
Kurvblad 8 visar även Bodediagram för den totala
överförings-funktionen Gk(s)-Gp(s) med de parametrar som presenterats i ovan givna text.
Som framgår av Bodediagrammet har filtreringen en önskad
29 _ SE'rLB Am , 36 % G \ må I 1.020 ms 6
59:2 -
.m
15/\
801! 3
3.000
(08)
§42 _
.m
(DEC)
:á
45
I
A
4 a
'm
5
5 _kb-dj
.
a
-45
i
.5
-90
..
1
2
m '
tog
10
10 N
(WS)KURVBLAD 8
Bodediagram för filtret G2(s) samt för den totala överförlngs-funktionen Gk(s)-Gp(s).
37
SIMULERINGSRESULTAT MED KOMPENSERAT RÖRELSESYSTEM
I detta avsnitt presenteras simuleringsresultat av det kompen-serade rörelsesystemet. Simuleringarna har genomförts med hjälp av digitaldator. Därvid har de kontinuerliga ekvationer som beskriver filter, servo och den skenbara accelerationen över-satts till digitaldatoralgoritmer. Den metod som nyttjats i detta fall benämnes Runge-Kutta's metod. Metoden baserar sig på en systembeskrivning av tillståndstyp. Eftersom utsignalen, den skenbara accelerationen, är en funktion av 6, o och dess deri-vator är det av vikt att tillståndsbeskrivningen väljes så att dessa komponenter utgörsystemetstillståndsvariabler. Simuleringsresultaten visar att den statiska- och dynamiska kompenseringen som dimensionerats under kapitel 5 har avsedd effekt.
Av simuleringarna framgår att den dynamiska kompenseringen Gl G2 ger såväl mindre tidsfördröjning som bättre amplitudöverens-stämmelse mellan accelerationsbörvärdena och den skenbara
acce-lerationen.
Det bör dock betonas att flera osäkra antaganden föreligger, däribland bör nämnas metoden att beräkna den av föraren skenbart upplevda accelerationen och de linjära modeller som ansatts för servosystemen.
Tillståndsbeskrivning av systemet
Det dynamiska kompenseringsfilter som föreslagits under kapitel 5 har en total överföringsfunktion av typen
Pl+-P25+-...+-P6s
G (s)=k 5
Tl-FTzs-F...-+T65
Filtret tilldelas i detta fall en tillståndsbeskrivning i
observerbar kanonisk form (jfr ref. (5)). Denna representation uttrycks med koefficienterna ai, bi och D, där
38
13': (PG-i ' P6°T6-i/T6)/T6
51' :TG-i/TG
D = P6/T6
Med de val som gjorts har tillståndsvariablerna följande be-tydelse. x1==? x2==6 x3--x7 (filtervariabler) X8-'X%2 (filtervariabler)
X13=4>
X14=4>
)
x15 (filtrerad av obör, används i uttrycket för ebör
Tillståndsbeskrivningen för accelerationen i u-led blir
därmed:
r-
"
X1
l X2
2
x2
2C1%:sz
1'X1 + (X3 + DOebörhuol
x3
bl°ebör+x4 'al'x3
x4
=
bz'ebör+xs' az'x3
X5
b3'ebör+xs' a13°X3
X6
134 ebör + X7 " a4 'X3
_X7j
_bs ebör-aS X3
4
där A H6bör ==arcsin (- g-cos(X15)Ubor ) OCh -x15==-AL°x15-+AL-ar051n (---)Avbör
Koefficienten AL bestämmer egenskaperna hos det första ordnin-gens fllter som kOpplar ebör och obör.
Utgångsrelationen dvs den skenbara accelerationen i u-led får
följande utseende:
_ . . 2 _ .
Au_ -Rx2 - g 811] xl cos x14 + xl3(d Roos xl) Sln xl
Konstanterna :1 och wol beskriver e-servots dynamik. För acce-leration i v-led fås en liknande beskrivning.
39
Simuleringsprogrammet beskrivs av nedan givna flödesschema.
Programlistan återfinns i appendix.
START Inmatning av konstanter
i
Inläsning av insignalvektorn Aubör' Avbör Beräkning av filtrets totala överföringsfunktion uttryckt i P1 och Ti Beräkning av tillstånds-beskrivningens koefficienter bi, ai, Di
Runge-Kutta rutin för beräkning av skenbar acceleration A , Au v Plotrutin < STOPP40
Plotresultat
Vid simuleringarna kommer insignalen, det vill säga Aubör
och AV " , att anta sinus- eller stegformade tidsfunktioner.
Kurvblgâån 9-15 visar simuleringsresultaten med och utan det dynamiska kompenseringsfiltret G2. Registreringarna visar att
en kraftig förbättring har erhållits medden dynamiska
kompen-sering som beskrivits ovan (Gl G2). Förbättringen innebär så-väl mindre tidsfördröjning som bättre amplitudöverensstämmelse
mellan accelerationsbörvärdena och den beräknade skenbara
acce-lerationen. Den filtrering av obör som uttrycks med variabeln
x15 i tillståndsbeskrivningen tycks enligt simuleringarna vara onödig. Filtrets tidskonstant AL har därför i de flesta fall givits ett högt värde AL==lO. Vid samtliga simuleringar har de filterkonstanter som beräknades under kapitel 5 utnyttjats. För de bägge servosystemen har relativdämpningen och egenfrek-vensen haft följande värden: ç==l, wo==12.4.Pendelradierna i längd- och tvärled har valts lika. Således d==0 och R==l.
41
G1 G.,
DYNAPISK KOLPENSER
iNG
DYNDLISK KWMZPENSEGi RING I. [m/sz) A (m/s V
Avbör
/w/
KURVBLAD 9
Accelerationen vid stegstörning med och utan
A " UbOI' (ln/SQ) vbör AA _\\
//
Tis]\
0 l i! 3 4 3AV(m/sz)
gYNêMlSK KOáPENSERING
Au (III/S 2
DYNAM
G1 G2
ISK KOlPENSER
KURVBLAD 10 42
Av(m/$2]
gYNAMISK KOMPENSEHING
1
a
3./
'
ms)
0 i 3 4 5
Au(m/$2)
DYNANISK KOMPENSENING
G1
/\
/
\
_1,,x/
Bör- och ärvärdesaccelerationer registrerade med och utan kompenseringsfiltret G2. Vid simuleringarna gällde AL==lO.
:L
2
ubör (m/S ) 43
\
Z Å V 1 .U 4! 3 4 5A (m/s 2
DYNAXÃISK KOMPENSERLNG
u
G1 G2
/
\
3\./ KURVBLAD ll 4 43
Au (m/8 2)
DYNAM] SK KOMjPEN SERLNG
G1
/"\\\S
1///-\\\
Bör- och ärvärdesaccelerationer registrerade med och utan kompenseringsfiltret G2. Vid simuleringarna gällde:A
AL==lO. vbör
/AVbö r ubö
_lff ø
KURVBLAD 12 44
o 1 2 .3 4 5 6 T(S) 5
Av(m/52]
DYNAMISK KOMPENSERJ NG
Av(m/ 2)
DYNAMIBK KOMäENSERIWG
G1 G7
4
G1
/\
/\
3
2 A//ø\\\ 4//øøä\\\X\,/
1 I \\ T(s) T(s)I!
1
2
§V
4
5
3 e°
-..1... 3....
3
4
5
5A (In/sz)
DYNAMleK KOMPENSERÅZNG
A (m/sz)
DYNAMISK KOMPENSERING
u
G1 G2
4u
G1
_ 3 A 2x
2
'I(s) \\////r 'r(s) 0 x 2 3 4 s see 1 2 3 4 5Bör- och ärvärdesaccelerationer registrerade med och utan kompenseringsfiltret G2. Vid simuleringarna gällde: AL==0,1.
Aubör
2
45
mls4 Aylzaör (
y
3 I /2 /
1
l 00 1 .2 3 4 5 6 T(S) 3 52
AV[m/s )
DYNAMISK KOMPENSERING
A (m/sz)
DYNAMISK KOME ENSERITG
G.L c;9
V
G
4 4 13
/\
3
/
\\,/
1
Å
,
,
\
Tis)
T(s)
,
6 1 2 3\JIx
4 5_ a
6 a ww«l 2 3 4 s.
5 SA [m/s 2)
DYNAMISK KOMPENSERING
A (m/äz)
DYNAMÄSK KomrENSERIkG
u
G1 G2
* u
G1
4 4 3 /\\\ /r\\\* 32
/
\
I
2
/
1 I 1 \\ T(S] T{s) co 1 i! J\U/\ 4 5 > 96 e 1 2 3 4 5 KURVBLAD 13Bör- och ärvärdesaccelerationer registrerade med och utan kompenseringsfiltret G2. Vid simuleringarna gällde: AL==lO.
ubör AVbÖr N
DYNAMI
G1 G2
SK KOMEENSERI\,
[W
\! 2
l
KURVBLAD 14\
\
46DYNAMf SK KOMtENSERI
G1
V
2)
:SK KOMLENSERTNG
/\
' \
T(s)
5Bör- och ärvärdesaccelerationer registrerade med och utan
kompenseringsfiltret G .2 Vid simuleringarna gällde: AL==10.
47
m/sz) r i k
,
U
V
,M
1||||||||||I ||I I G A l l ! ! ! T R ||. I. |l |. i. ||l l||l%
A
H
N ; I V1%
1.
1.
1
Im
II
II
JI
Ia
IU
.
K
A1|\
\|l
...
...
.|\
\1
m
41
11
..
.
( I , I ;A
I
X
I
J
V
s A ul a ! ! ! l m , ' I ' l l -ul l ] r k l k V \ . \ |. 1 1 A r l l . I I I ' 44 Nm. , L U I L T G N T r k v! ! ! R E 8 N [ Um
0 J U K . K . . 2 .. 11 M G .n ul l W l li n. .. , D G . 5 1 . 1 1 1 I N V M i l nu. ) H V S F r i ! ! . / m f l ' \ AV H F G A N N ! ! T 0. W Än n u m l
m
A
n
n
t:
S N L U U M m Il l. . C . m H H V 0 % K A n n d l n) J 8 1 I .. .1 11 1 m äm
...
.
U
V
da
D
G
A
q
m
m
e a H V r gA
H
t
n
) t i l l ] 5 . 1 1 _ 2 . L||||||||I |I J . l r S g e W e l u r m A e s 5 4 D O d . J kl it ms l a ( L r 0 G H i l l T 8 2 _N_ i l l 1 G K 8 H U ril
wv
m
u
h
0 H V . d i K f K 1 " a ss
vg
.L U 5 r n M 2 l äi G rm1
UV
mi
L i v V . p n n R m U N 0 nu. .. ) H U K k R 1 S M U ( L u A 1 . 1 . " . .48
REFERENSER
B. Richter: Beitrag zum Problem der Beschleunigungssimulierung an Fahrsimulatoren. Berlin 1971.
Dobbeck: Darstellung von Beschleunigungen in Fahrsimulatoren bis in den Grenzbereich. Berlin 1974.
Fordonssimulatorer. Statens väg-1972.
Nordström, B. Kihlgren:
och trafikinstitut, Rapport nr 14,
Nordmark: Klassisk mekanik med tillämpningar inom fordons-dynamik. Statens väg- och trafikinstitut, Meddelande nr 3, 1976.
K.J. Åström: Reglerteori. Almqvist & Wiksell, Stockholm 1968.
Strandberg: The Driving Simulator Moving Base System.
Korrespondensbilaga (ej publicerad). Statens väg- och
trafikinstitut, 1974.
Strandberg: Forskningstillämpningar och utvecklingsplaner för en körsimulator. Diskussionsunderlag, delvis för publi-cering senare. Statens väg- och trafikinstitut, 1975.
Lidström: Programbeskrivning för Bodeplot (MLSTAB). Statens väg- och trafikinstitut, 1976.
nçüc ar in n n n n n U 10 15 M 9 [U U
53
Vi KW ul O Al #***##W#+k#4*%kké4*W$«W#$?kk$*&*#k#wk*k*vâ##W#PM$###*** KOPSIMULRTDPHE PORELSESVSTEH BG BEPGDRHL SEFT 1975 em****wmw*aa+rwww++ae++ykws+vv+ukww*$«&áw++wr*«+a**w«w* DIMENSION Hüflñ'.Flflñ'eVâflñäukjflå*vñ4fliiDIMENSIDH RUBVEBQWvRWEVEBB'IRUVECRl RVCSBB'IT'EBB' DIMENSION RkEW-BVZW'C'E'»RVE' RERL KO K1:V2'FZ-P4 PERL LRMBDR DT= Bl 6:9 81 H: 2*G Dü=ü ****#v+kkkkkv+M«$#++t++k+#«k+»á*+r+4#+k+++#*A?##+kkk##*
INl'iRTNIP-JB RE" FCW'ETRNTEF'
*4*k#*4+$*w++P*A++#+k++++4++++F+$+k+w+++k§+04++fá$&k$*h TVPE 5 FDPHRTVRRH P RECEPT lü-P FURWRTVF? 2* TVPE 15 FDPMRTVFRH 61 W RECEPT 18.u01 MU2=M01 TVPE 20 FUPMRTRPPH SETl ' RECEPT 16.5ET1 SET2=SETl TVPE 25 FDRHRTVFRH H0: * RECEPT lBJND: TVPE :ü FDPMRTKPSH SETI" RECEPT lüvSETZ TYPE :5 EDPMRT'RRH H04 ' RECEPT 18.H04
NEÃ?G$ R*N0§*
Hü6=G/ R*HO4\ SET4=SET3 SET5=SET2 SET6=SET3 TVPE 4B FOPMRTVRRH RL 3 RECEPT tiRL **#**m#mrk#$kk#*?#4$kh#+#4VW?k+WkV$P**+$*v+$*+#** #Wk#k INLRSHING av IHSIGNHLVEPTDPH FLJ INSIGHHL MED nw 2:-1 Hu=sxn.9v=3TEG 2:e Hu=sTsüqu=sxn 2:1 nu=szn qv=0 2:2 eu=ø.q =51u uv=2 Ru=sxn,qw=51n nw=4 RU=ETEG q =0 :'=5 HU=G RV=ETEG uxzs RU=STEG aw=5TEGkkawa#W?wk**vvwwvw#r*m&wvve+vw+v++A#k«4+ *##*kwrk$*k* TVPE 45 FOPMRTV99H N* ' RECEPT 4E.NE FOPHRT'ISJ TVPE 47 FOPHRTfââH M 1 RECEPT iQJN 00 48 I=l 6 TfI)=0 00 49 1:1,599 T(I+1)=T(I>*DT IF<NX'5@,55,60 00.52 Iciøsøe HUBKIW=fl -CDSVM*TfI**>wW avecxbsx GO TO 110 DO 5? 181,660 RUBVIW=H HVB(I)=(1 -COS(N*TVI )'*X GO TO 110 IEKH/-2 65170 7? LiiG 181 600 PUE'2'= 1 -CüsrutTIIW*\wx 00
_ _ . 1 N 03 W! B U ! 03 N a n n u-: n P P m 120 39 140 0 0 0 0 ? ' HVE(I\=Q G0 T0 118 00 ?2 I=1v686 HUBÅI)=B. HVB<IW=<1 -CDSVMJTrläuñ4H GD TG 110 IFVNH 4WBB.85nQB DO 82 I=1nEBü HUSfIN=k1 -CDSfuhTVII'I+ FNB" I '1=HUEH . I * BO TD 116 DO 8? I=1-Eüü HUBfIW=W HVBVI\=B GU TüllB Dü HUBk13=G HVB I" I 'i :'-4' GB TUllB UU 152 I=1våüü HUBVI'=H HVEVI'=H CEINTINUE CHLL PLülLV'TxHUEvGEBrE CHLL PLUlVV'TcpvgaiüüvE -Pwki'ir'ê 4 4' 4' 4- ?54.4 4 442%? BEPRkNING 9? QVEPCOPIHBSF *#*k*k*v«k+ki+kkkák#+##ha TVPE 115 FURHPT'FFH :P1 I RECEPT 19.:P1 TVPE 126 FOPMHTrSSH :P2"* RECEPT 16.:Pz HV13=NUE**2 chw=2 *SET:*MDZ H(I1=1 DO 122 1:4-6 HüI'=G Bi3\=ü CHLL PGLMU°Q'B C DU 125 I=1»5 R(I*=CVII 8(11=M05W*2 8(2*=2 *SET5*M05 8(3 0:1 CHLL PULHUrñaBJC* DU 130 1:115 Pr1»=c<1w H 1*=u044*2 8(21=2 «SET4wu04 Hf2 =1 00 132 1:4 5 Hr1 =ø ' 8(1 1:1 er2 =292 srza=ø CHLL püLnurq e ca DO 125 I=1 E HKI'=CVI' B 1\=HOEW*2 8(2*=2 *EETEPHOE srzm=1 CHLL POLmurq,e.c| 00 149 1:1 5 Turxv=crlu H I. " .G 'G .1 11 ET TI-Hfu4* 4 :B :B '1 :1 'STnTI HC;4\ #4k+kk#####4+4*#Ww#w**k*#kk$** PN FDP lTILTEF'? *#-4=4<=+:+:+'+'94-*='+c+ +'+'+=+=°+'-§'+ *#04:**3' + 4'k4-'uk
*#*JURWA'WMUk VA' O' 4" 6"? #50* 4 4' h* 4'ALVAWK* +' 4! 4*- OFW! 02k* k 4: 6 4:50' 0' 44 424%* *W* 4000013043*
TILLSTHNDSEESVRIVHINGENS kOEFFICIENTEP W***$****W****W 41ka k* (Uk/0644201340604: invåi C C C 3 C C ' vv TFF: ' C
H1=Tucsvanrsw RZBTHf4'/TN(6* n3=an2»/Turew n4=THr2 /Turew HszTn<1 'an6 31=rpr$8oprswaucs>zansw 82=(Pf41-P'E*«TNK4>/TN 6' szwwzv-Prsmmczv'rmsN 84:'P 2W-P'F'*TN 2'/TH(6*' Bs=(p(1u.p(çvaH(1\/TN(6ä 0294"'6' T'l'tç' Päinñi .. . .AAA... ' TH(6 .xTergw ö/TN(6) 'TN/6 I'TNf6\
D O D G O 145 CZ:3#WW*m**W#***** RUNäE-KUTTH RUTIH Füp SEWHKNIHG HV UPFLEVD HCEELEPQTION
*m***m**#*wm*mmm*hr" T'"fW$WWWW$*kw*t*#*m#tw****$* DU 145 I=1215 K1f13=ü K2k1*=9 iZVIN=ü K4(I =G KU(I =B DG 155 1=1'599 LHHBDH=HTHH(-HUBVI*USDPTV'GPCDEKFU'lS'" tâ KlQ1W=Kü 2 K1C2J=-2 *SETl*HDi**O'EW-HülwuülkVU'll &+(K0(E +D*LHMBDH'WHül*Uül K1R3*=Bl*LHNBDH+FDV4W-H1 FDI K1(43382*LHHBDH+KOVS'-HZWKO' K1653=33*LHMBDH+FU'E'-HZ*FU' K1f5*=84*LRMBPH+WD'?W-H4WFüü-' K1RFV=85*LHNBDH-P5*VD'ZW 0NEGR=HTHHCHVB'I*ÅSDPTfG**2 -QVB'I'**2 '* Fl§81=PBl*UMEGH+'ÖV?1-WQl*+D'?' K1(9)=P82*0MEGH+KDV19'-PH2*FD'3' K1C1@)=PBZ*ONEGH+FG 11'-DHI*VDVE KifilD=PE4*DHEGH+Vüf12*-PH4*hD'8' Klå12 =PBS*BMEGH-PHS*LGV81 K1(13 =-2 *SET2*H02*FU'1:W-Uüåwwüâkkü'l4'+ P0(83+PD*GMEGHD 8*M02*N02 KJ.LLM '==f\'.'.l'.'l"13'1 Vlilñ*=-HL#F0 15 *PL*0WEBH LHMBDH=HTHN(-HUB(IIHSGRTu'G*COS&KUV15 +h1k15**DT/2 ' él-**2 "HUEW I \**2 :1 N K2(1)=K0f2)+K1f23*DTHZ _QUE.Iä««2 än l l t h I . V2'2 =-2 *SETl*NGi*th_ LV*PL'EW$UTNE ' &-H01*N01*VK0(1)*F1(1'*DT 2 * &+(K0'31+K1(3 *DT'2 +D*LHHBDP'*M01*HU1 V2C23=81*LHMBDH+(F0 4'+K1 4*VDTH '-91WVVD(E*+K1 3**DTK2. ?2(4)=82WLHHBDH+fVD'5'+Vl'5'4DT. '-H2*'F0 :*+?1'31*DTHZ K2(5 =BZ*LHMBDH+VVD'6*+kl'6 *DT' '-H3* KO(3 +K1(3 *DT/2. V2r61=B4WLHMBDH+VKD T'+%l '+DT '-H4*IKOKZ1+K1 3'*DT/3 K2f7'=BS*LHHEDH-HS*VFDVE**Vl':'VDTHE ' OMEGH=HTHH(HUE I"SDPTfG*G-9WB'I'442 1* Z=KUC83+K1(8)*DTKZ Y2V8'=PBL*0MEBH+VPOV9'+Fl'9'*DTH2 Y2i9)=PB2*0MEGH*VFOV1@'+*lfl9 +DTf2 J * J '-.f J wl ur j m '-PR1*2 w-Pnzwz V2(19'=PBZ*DHEGH+IPDV111+Vllll'vDT'2 '-pa3+: K2c11v=934m0msca+rw0r12N+K1rlzwaoT»2 w-øa4w: F2V12W=P85*OMEGH-P95*Z K2(123=-2 *EET2*H02* V0 13\+?l'l: *DT'2 ' å-H02*H02* VU(14'+V1'14'VDT 2 *+ &(V0(8)+F1V8)*DT/2 +PD*0WEGP'+HGZ*H02 K2(14D=Y0(133+V1°lI*WDT L K2(15)=-HL*(K0 15*+F1 15'*DTU2 \*HL DMEGH LHMBDH=HTHN -HUBVI'/SOPT IGkCUE'*O'15'+F2'l5*WDT/2 5 &**2 -HUBKI)**2 3' V3(1*=Y0 2*+Y2(2'*DT 2 K3(2*=-2 *SET1*H01*KY0'2'+K2 2 *DT/2 -&H01*M01*(V0(11*V2V2'*DT'2 '+ &(V0(3'+K2(2'*DT/2 +D*LHHBDHJ*H01*M01 ZaKOKZJ+K2(:'*DT'2 K3f39=81*LHMBDH+fYO(41*V2f4W4DTH2 h-Hi*2_ K2r4-=82*LHMEDH+rk0rsu+r2rswxoTw2 '-H2*2 K3<5 =93wLHMBDH+<K0rs.+v2r5w*0T/2 w-Hzmz K3(SJ:B4*LHMBDP+'V0(7I+F2(?1*DT'2 *-P4*Z K3(7)=85*LRMBDH-H5*KK0 31+K2f3\*0T/2 3 Z=FO<8J+K2(8'*DT 2 K3<e =PaimOMEGH+vk0<QW+v2r9'onnz K3r9»=PBJw0msoa+nk0<1ou+r2r10wwDTv2 KB(19)=P83*0MEGH+(KDC11>*K2(11 *DTf2 K3f11J=P84*0MEBH+KKOK123+K2(12'#0Tf2 K3 12)=FBE*0MEGH-PHS*Z K3<13»=-2 *SETzwuozvrvorlz»+w2rlzvaT/2 å-HOZWH02*<Y0 14\+K2(14J*DT 2 a*' a<v0r8 +r2<2 «0722 *PD*OMEGHWWMOZ*HD2 K2(14)-K0(12**Y2(12:*DT/2 ?2(15\=-9Lmrv0(15\+ 2«15 »oT/2 w+ &9L*0MEGH N-PR1*Z w-DH2*2 b-øñzwz N-PH4*2
156 155 O i j f i n i j A4 LQHBDH=RTHHu-HUB(I+1NKSURTCCGkCDS'hOV15 +V2a15 *DTläw*2 a-RUE°I+1I*+2 *) h4'l)=KüL21+FEV2|*DT K4(2\=*2 *SET1*H01*(K0(2'+K3u2>#DTW &-MD1#MQ1*KVU*l'+F3fl\*DTW &+(Kükf +k3'2*WDT+D*LHMBDHUkNQl#HDl 2=K0fäi+h2':"*DT K4u2*=Bl*LQMBDH+ KOC4\+k:f4)*DTW-Hl*2 K4L43=82*LHMBDH+(KDKS'+PI'ävkaW-HZ#Z K4f53=B33LHMBDH+äwüfS'+K2us\+DT\-QERZ K4E5*=B4#LHHBDH+'HDV7'+W217'*DT'*H4+Z F4C7)=ES*LPHBDH-H5*E DMEGH=HTRNCHUBVI+11'SDPTKGV+2 2=K0C3W+FZVBW+DT F4ñ83=PBl$DNEGP+'iDV?'+WZ'9'PDT1-°Fl#2 h4ü95=PB2WOMEGH+EhüIlü1+H3Vlü'*DTW*PH2#Z k4leI=PBZ*0MEBH+'Fü'lll+5:°ll'+DT'MPHI#Z K4f111=PB4#0MEBH+VFDI12W+§:'l2'+DT'"PH4t2 h4ñl2N=PBE*0MEGH*DH5+E K4(13 =-2 *SETE+HOS#IFDFLIW+!31lI'#DT-S-Hü2#uüâüflüfl4'+?E'l4W+DT' ä+fk0f8u+F3f81WDT+PD+OHEGH»AHDQ+HGZ F4ul4W=FüV133+F3u13W+DT K4'153=-QL*VLUV15*+FIIlSN+DT1+HL*0MEGH DG 156 H=1,15 KCI1'N'1=KCH N '+011 *'H *+2 HU(IW=-R*'Kl'2'+2 PPEIZW+2 &-G*SIH'Vüri **CüSVhüfl4W\ &+KOV13I#VDV13'+'DD-U*CGS'V0'1 "+SIHV*DF1" HVkI)=-uDG-R#EDS(K0'1"it'rl'121+2 +K2V123+2 &+B*SINVF011431-<2 *P*K0(l31*Kü 2**SIH' Ull\I **$$*w#««w««pw$++*4«W#rk+?++$++v+v++a+wk+4++kh$##4kvka -HVBFI+1*#F2 n' *i 2 ?4'+EZ *KI'fJ'+%»4'H '*#DTÃ'5 +FZ'.2'+§L1'2' M'S mw:r1:)+w4c1: \/s PLDT-RUTIN ******P##W++v#$++v*+*++ok$+*#h++k+&&4?++#åtté*kä#k$WVt$ EHLL PLDLFVüTvHU GBB.S .5 »G .G \1 .1 .ST.TI.HC.4W CRLL PLUlKVfT HV'EüB-å -5 .B ;0 .1 'l .ST-TI:HC.4P END SUBROUTINE .F3'C'LML1'Fl E E DIMENSION HV61 Brrn.cr çrl.=H(1 &gr11 I3 :| .J _' cczä=ac1wwer23+nr1wwerzw crzv=H<31*e<1w+Hr1wwer:»+Hr:|+av2n cr4z=8«1a*9<4.+Hrgwwer:w+9r:n»erz CKSN=HKSWWEKLW*Qf4'*EV2 +H'E'49'2v c<6 =Hr6»ueriw+B zwwñrsw+er:wwar4\ gr7n=gr51*grg.+gr:\4q.s. CCBJ=B(2)*H(6 pETUF'H EEPJEI