Nr 59 : 1981
59
Statens väg- och trafikinstitut (VT) : 58101 Linköping National Road & Traffic Research Institute - S-58101 Linköping : Sweden
The visual environment in road traffic
by Kåre Rumar
Reprint from Kyoto Proceedings 1979. Commission Internationale de I'Eclairage. Publication CIE N? 50, Paris 1980.
COM/Vl/SS/ON WTERNAT/O/VALE DE L'ECLA/RAGE
lNTERNAT/ONAL COMM/SS/ON ON /L/_U/\///NA T/ON
/NTERNAT/ONALE BELEUCHTUNGSKO/V/M/SS/ON
PROCEEDINGS
19th SDNESSI
KYOTO 1979
EXTRAIT
OFFPRINT
SONDERDRUCK
PUBLICATION CIE NO 50 (1980)
BUREAU CENTRAL DE LA CIE
Chairman : J. B. DE BOER
P - 79-01
THE VISUAL ENVIRONMENT IN ROAD TRAFFIC
Professor Kåre RUMAR *
ABSTRACT
Initially the functioning of the visual system and the characteristics of the road environment in general are analyzed
for daylight traf c and compared with those of night traf c. The visual tasks in traf c are mainly to detect the presence of
objects or a change of events, to identify meaning, to estimate and to predict what will happen in order to be able to decide what to do. But the human visual system is a daylight system. It has several physiological as well as psychological de ciencies at lower levels of illumination.
In daylight traf c there is normally a vast redundancy of visual information. The problem is to select and use only the most relevant information in making predictions. In night traf c however the information available is, due to the mentioned drawbacks of the visual system, often very poor and at longer distances often not even above the visual threshold.
Night traf c shows a considerably higher accident risk than daylight traf c. Countermeasures in night traf c must aim at improving the lighting and signalling conditions. The role of some CIE technical committees when it comes to suggestions, countermeasures and solutions to these problems is discussed in short. Finally, some suggestions concerning a revision of the organization of technical committees are put forward with the aim of further improving the work of the CIE.
RESUME
LE MILIEU VISUEL DANS LA CIRCULATION ROUTIERE
Les fonctions du systeme visuel et les caractéristiques de l environnement des routes en general sont analysées dans la circulation de jour et sont comparées avec les fonctions de la circulation de nuit. Les informations visuelles de la circulation sont en principe de découvrir la presence des obstacles, ou des changements ou des e'vénements pour identi er l importance, pour estimer et prévoir ce qui va se passer pour pouvoir de cider ce qui est a faire. Mais le systeme visuel humain est un systeme de lumiere du jour. 11 a plusieurs défauts physiologiques et psychologiques aux niveaux plus bas de la lumiere.
Pendant la circulation de jour il y a normalement une plénitude considerable d information disponible. Le probleme est de choisir et d employer seulement l information la plus importante pour faire des predictions. Cependant, pendant la circulation de nuit l information disponible est, a cause des désavantages mentionnés du systeme visuel, souvent tres vague et, a une grande distance, méme au-dessous du seuil visuel.
La circulation de nuit montre un risque d accidents notablement plus élevé que celle de jour. Il faut que des mesures complémentaires pour la circulation de nuit visent a améliorer les conditions de lumiere et de signaux. Le role que quelques comité techniques de la CIE doivent avoir concernant les propositions, les mesures complémentaires et les solutions a ces problemes, est discuté en peu de mots. Finalement, pour améliorer le travail de la CIE, quelques propositions concernant une revision de l organisation des comités techniques ont été présentées.
ZUSAMMENFASSUNG
DIE VISUELLE UMGEBUNG IM STRASSENVERKEHR
Zuerst werden die Funktion des visuellen Systems und die charakteristischen Merkmale der Strassenumgebung bei Tageslichtverkehr analysiert und mit denen des Nachtverkehrs verglichen. Die visuellen Aufgaben im Verkehr bestehen hauptsächlich darin, die Anwesenheit von Gegenstande, Veranderungen oder Ereignissen zu entdecken sowie deren Bedeutung zu identifizieren ; zu schatzen und vorauszusagen was geschehen wird, um dann entscheiden zu konnen, was zu tun ist. Das Visuelle System des Menschen ist aber ein Tageslichtsystem, das heiBt, daB es bei geringer Beleuchtungsstarke mit mehreren physiologischen sowie psychologischen Mangeln behaftet ist.
Im Tageslichtverkehr stehen normalerweise genug, nicht unbedingt gebrauchte Informationen zur Verfugung. Um eine Voraussage machen zu können, ist es ein Problem die momentan nötigte Information auszuwahlen und nur diese zu benutzen. Wegen der obengenannten Nachteile des visuellen Systems ist die Information bei Nachtverkehr oft sehr schlecht und erreicht bei weiteren Entfernungen nicht einmal die Wahrnehmbarkeitsschwelle.
Bei Nachtverkehr zeigt sich eine bedeutend höhere Unfallsgefahr als bei Tageslicht, sodaB die GegenmaBnahmen fur den Nachtverkehr darauf hinzielen mussen, die Beleuchtungs- und Signaleinrichtungen zu verbeBern. Die Aufgaben einiger technischer Komitees des CIE im Zusammenhang mit GegenmaBnahmen sowie Lösungen dieser Probleme werden in Kurze diskutiert. Zuletzt werden, um die Arbeit des CIE noch weiter zu verbeBern, einige Vorschlage zur Durchsicht, die Organisation des technischen Komitees betreffend, vorgelegt.
l . Background
Man has always had the need to move, the need for transport. In fact the early species of mankind were continuously moving. They were nomads, they could not settle down because they were dependent on the naturally growing vegetables and the wild animals. Both these sources for living were quickly consumed when staying at one place. So man moved from place to place. Moving, hunting, collecting food and eating in daylight sleeping and resting in the night.
This picture did not change for some million years. Man developed into a creature adapted to living and moving in daylight at slow speed and with special sensory, central nervous, and muscular properties for such conditions. This evolution that was rst postulated by Darwin is a slow process of natural selection that all species have gone through.
Not until the last thousand years man has really started expanding his activities into the night living and moving. And during the last hundred years the speed of human motion has increased incredibly. From earlier limits at normal foot or horse speed man may now move a thousand times quicker in space and up to about a hundred times faster on the ground.
Technology has improved enormously but man is still essentially the same one as fty thousand years ago. Man is no longer moving by his own force. Machines are doing the work. But man still has to control the action of the machines. Road traf c as well as air traf c, sea traf c, and industry have become man-machine systems.
2. Road traf c - A man-machine system
Man has built ingenious equipments for easy motion and advanced routes for moving on. Transportation is done at high speeds and at all levels of illumination day and night. But it is still the same man...
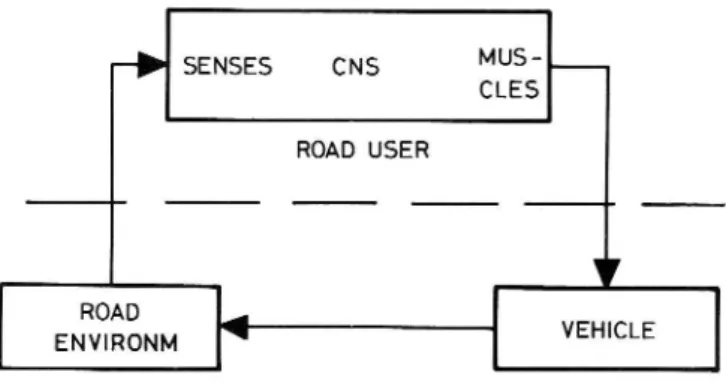
The functioning of the road traffic system may be
illustrated by figure 1. Man is collecting information about
the road, the traffic conditions, other road users, his own vehicle by means of his senses mainly vision. This information is treated by the central nervous system where estimations, predictions and decisions are made. The deci-sions are carried out by the various muscular systems we may look to the right, steer to the left, brake, etc. This action in turn changes the information acquired in the next moment and so on... The system is a closed loop, it has feed back. Of course this system and its functioning are in uenced by
2
various extraneous agents. Man is e. g. in uenced by fatigue, alcohol, drugs on one side and laws, rules, enforcement on the other. The technical system changes characteristics with general illumination, weather, etc.
+ SENSES
CNS
MUS
CLES ROAD USER
I
V
ROAD
FIG. l. The man/ machine system in road traf c. Information about
the road, other road users and the vehicle is collected by the human senses and processed by the central nervous system. Actions are taken by muscles
and this action leads to new information, etc.
FIG. 1. Le systeme homme/machine dans la circulation routiere.
L information sur route concernant les autres utilisateurs, le véhicule est dirigé a l aide des cinq sens depuis le systeme nerveux central (CNS). Les actions sont faites par les muscles. L action mene a une information nouvelle, etc.
ABB. l. Die Mensch/Maschinenkombination im StraBenverkehr.
Informationen uber die StraBe, anderer Verkehrsteilnehmer, des Fahrzeugs,
von den menschlichen Sinnen aufgenommen, vom zentralen Nervensystem (CNS) verarbeitet, MaBnahmen werden durch die Musklen ergriffen, diese MaBnahmen fuhren zu neuen Informationen, u.s.w.
From the layout of this system it is quite clear that a
correct information acquisition is a crucial prerequisite for a
smooth and safe functioning. It may go wrong anyway but
without a veridical perception of traf c and vehicle
conditions the accident risk becomes high and the road user comfort low. The primary information channel without comparison is the visual system. A break-down of this man-machine system is an effect of inferior interaction between the various components. The results are lowered traf c capacity, con icts, incidents, near accidents, and accidents. The system is very flexible, however, since man for periods can increase effort and diminish comfort.
In the whole world about 250,000 persons are killed every year! The number of injured is in the order of 10 millions. It is estimated that of these about 25 % will suffer more or less
severe permanent disabilities as an effect of the traf c
accidents. Roughly 10-15 % of the hospital beds are occupied
by traffic victims. According to medical authorities the three major causes of death in industrial countries are cardio-vascular diseases, cancer, and traf c accidents in this order. It is quite clear from this that traf c accidents constitute a major health problem and thereby also a very large economic problem for society.
Although the accident risk in traf c calculated on the basis of number of travelled vehicle or person kilometers has gradually decreased over the last 30 years the absolute number of victims is still increasing.
3. Visual tasks in road traf c
Vision is the main human information channel in road traf c. The main task of the visual system is to collect the relevant information available within the visible part of the electromagnetic energy range. But the visual requirements put on persons applying for drivers licence give another picture. Normally a certain minimum visual acuity, a certain minimum visual eld are required. In other words, what is formally required are two pieces of ability helpful in collecting information not the information acquisition capacity itself. Let us consider the visual parts of some important information collecting tasks in road traffic.
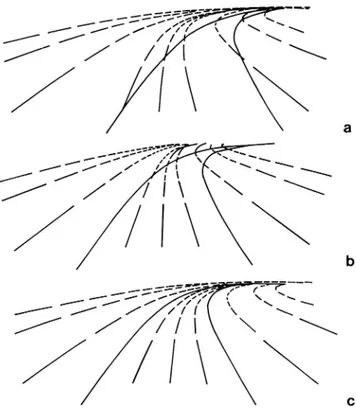
Steering and braking two major tasks in driving are
according to GIBSON (1966) and LEE & LISHMAN (1977)
handled by an immediate analysis of the eld of visual
(optical) ow (see gure 2). Early ideas of a related nature were presented by CALVERT (1950).
It is claimed that all information necessary is available in
the eld of optical ow. Studies of drivers eye movements
support these hypotheses. Drivers can handle the steering
task, follow the course of a road without really xating the
road or the road edges. As regards braking and other tasks with fast changes the evidence is somewhat more con icting. Experiences from simulator driving strongly suggest the importance also of forces upon the body physical motion. Further, Johansson in many studies of motion perception (JOHANSSON, 1958) has demonstrated that perception of
motion, of events, is not a special case of successively
perceived positions with motion being inferred. On the contrary motion is something basic, and the static condition is a special case which often leads to misperceptions. In traf c man is normally in locomotion, and a third major task is to detect and predict the motion of other road users. According
to JOHANSSON (1975) this is done by an immediate analysis of
the common motion vectors in the visual field (see figure 3). According to this hypothesis the cue to detection and the basis for estimation and prediction of speed and direction are the differences in motion vectors. This task is one of the more dif cult in road traf c. In a car following at a constant distance the lead car has no relative motion and consequen-tly, is not spontaneously considered as a potential danger. Oncoming vehicles at distances necessary to consider e.g. in overtaking situations (500-1,000 m) have very small motion vectors, and it is an almost impossible human task to estimate
their speed correctly (RUMAR & BERGGRUND, 1973).
Another major information collection task in road traffic is
to detect stationary obstacles, signs or signals and to read, interprete and understand the information available. In this task the static visual acuity mentioned initially could be important. Since speeds of today are so high it is important at long distances to detect holes in the road and read various road signs and markings. But if the speed is lowered even these tasks can be handled acceptably. The large role of peripheral vision in traf c seems to be overlooked (ROCKWELL et al., 1977).
C
FIG. 2. Exemples of the field of optical flow in three cases (after LEE & LISHMAN, 1977) : a) the driver does not react to the curve but goes straight on ; b) the driver does not steer enough ; 0) the driver steering reaction in the curve is correct.
FIG. 2. Exemples du domaine du flot optique en trois cas (d apres LEE
& LISHMAN, 1977) : a) le conducteur ne réagit pas a la courbe et continue a conduire tout droit ; b) le conducteur ne manoeuvre pas suffisamment ; c) la reaction de conduite du conducteur a la courbe est correcte.
ABB. 2. Beispiele des optischen FluBfeldes in drei Fallen (nach LEE & LISHMAN, 1977): a) der Fahrer reagiert nicht auf die Kurve sondern fahrt
geradeaus ; b) der Fahrer lenkt nicht genug ; c) die Lenkungsreaktion des
Fahrers ist richtig.
'\
_
/
d
FIG. 3. Illustration of how drivers probably analyze relative motion in
a traf c situation. The whole field in front of the driver moves over the retina according to the vectors indicated. The motorcyclist has a special vector since he moves in the environment. The difference between the common vector and the motorcycle vector gives the speed (after BERGSTROM, 1974).
FIG. 3. Illustration de l'analyse par les conducteurs des mouvements
sur la rétine selon les vecteurs indiqués. Le motocycliste a un vecteur special puisqu il bouge dans le milieu. La difference entre le vecteur ordinaire et le vecteur de la motocyclette donne la vitesse (d'apres BERGSTROM, 1974).
ABB. 3. Die Abbildung zeigt, wie die Fahrer in einer
Verkehrs-situation eine relative Bewegung analysieren. Das ganze Feld vor dem Fahrer bewegt sich, den angegebenen Vektoren gemaB, uber die Netzhaut. Der Motorradfahrer hat einen speziellen Vektor, weil er sich in der Umgebung bewegt. Der Unterschied zwischen dem gewöhnlichen Vektor und dem Motorradvektor ergibt die Geschindigkeit (nach BERGSTRÖM, 1974).
With this as a background it is perhaps not so amazing that in those correlation studies carried out in order to nd the relationship between accidents and visual performance very weak correlations were obtained (DAVISON, 1978). The main causes for the failure to establish the importance of vision in road traf c in spite of the fact that the most common explanation in traf c courts is I did not see him in time are probably that the wrong visual functions are studied, that drivers with bad Vision compensate their handicap by e.g. lowering speed. that accidents constitute a very unreliable criterion.
4. Day versus night traf c
In daylight traf c there is normally a vast redundance of information available. The ambient illumination clearly makes visible at long distances the general optic ow pattern, the various motions, their differences and directions, and various details of the traf c scene depending on their size and contrast against the background. Here the problem is not to see but to select from this over ow of information the parts that are necessary to make correct decisions and predictions. The nature and characteristics of this selection of in-formation are not really known. But is is certainly carried out at higher levels of the central nervous system (BROADBENT,
1958 ; BRUNSWIK, 1957). JOHANSSON & RUMAR (1966) showed
how drivers information acquisition from road signs varies with the message of the road sign rather than with its visual characteristics (see gure 4). It is no problem to see in the daylight conditions because man is a daylight creature. The problem is not to detect but to select the relevant information.
45 A
I POLICE CONTROLJ
L
30% 65 %
FIG. 4. Results from a study of driver response to road signs. Some 100 meters after passing the sign position only 30% could report sign (a)
while 65 % could report sign (b). Since the signs do not differ too much in
size and colour the difference is probably due to a central selection.
FIG. 4. Résultats d'une étude de réaction des conducteurs a des signes
sur les routes. Quelques 100 metres apres avoir passe la position du signal seulement 30 % des conducteurs pouvaient indiquer le signe (a), tandis que 65 % pouvaient indiquer le signe (b). Puisque les signes ne different pas trop du point de vue grandeur ou couleur, la difference est probablement due a une sélection centrale.
ABB. 4 Ergebnisse einer Untersuchung uber Reaktionen der Fahrer
auf Verkehrszeichen. Etwa hundert Meter nachdem Sie die Zeichenposition passiert hatten, konnten nur 30% uber Zeichen (a), Wahrend 65% fiber Zeichen (b) berichten konnten. Da sich die Zeichen hinsichtlich ihrer GröBe
und Farbe nicht sehr unterscheiden, wird der Unterschied auf einer zentralen
Auswahl beruhen.
Many authors have studied road signing problems (e.g. FORBES, 1964). Many improvements of letter, digit and symbol design have been implemented.
In night driving conditions on the other hand the visual situation is radically worsened (RICHARDS, 1967). From
4
gures 5 and 6 it is evident that the illumination levels under which night traf c is carried out are in the outer region of photopic vision where the receptor sensitivity is considerably lowered. But it is important to stress that although it is called night traf c the illumination levels are normally so high that it is not pure scotopic vision that is used in night traf c. The night traf c illumination levels are normally referred to as photopic or mesopic. I CONES SUN DAYL I GHT READING LIGHT NIGHT I TRAFFIC MOON LIGHT RODS STAR LIGHT
FIG. 5. An illustration of how night traf c illumination levels are Situated in an interval where neither cones nor rods function very well.
FIG. 5. Une illustration indiquant comment les niveaux d éclairage de
la circulation de nuit sont situés dans un intervalle ou ni les cönes ni les batönnets ne fonctionnent tres bien.
ABB. 5. Die Abbildung zeigt, daB das Beleuchtungsniveau des Nacht
verkehrs in jenem Intervall liegt, in dem weder Zapfchen noch Stabchen gut funktionieren.
4
VISUAL CONTRAST SENSITIVITY DAYLIGHT OPEN / SUNSHINE
Mr
ROOj//
/I
M
STREET// MOON L ' GENERAL ILLUMINATIONFIG. 6. An outline of how human contrast sensitivity depends on
general illumination levels.
FIG. 6. Un apercu de la dépendance de la sensibilité humaine aux
contrastes selon les niveaux d éclairement.
ABB. 6. Eine Ubersicht uber, wie die menschliche Kontrastemp
In gure 6 is shown how contrast sensitivity is drastically lowered at levels of night traf c illumination. Contrast sensitivity has been intensively studied e.g. by BLACKWELL (1946). While contrast is only of secondary importance in day traf c it is of primary and vital importance in night traf c. What is very often necessary in vehicle lighting is to distinguish between a somewhat brighter surface (e.g. a
pedestrian) and a somewhat darker surface (the background).
In road lighting the contrast is normally reversed. The task is to distinguish a somewhat darker surface (e.g. a parked car)
from a somewhat brighter surface (the road). These contrasts
are often, specially in vehicle lighting, very close to the visual treshold.
On top of this basic visual de ciency comes another property of the eye especially important and critical in night traf c glare sensitivity. The main reason for glare in road
traf c is the optical de ciencies of the eye that make the light
from various sources re ect within the eye and thereby cause
the veiling stray light (see gure 7).
a
FIG. 7. The stray light phenomena of glare and two illustrations
(a) showing the retinal picture without stray light, (b) showing the same traf c situation with stray light glare.
FIG. 7. Le phénoméne d éblouissement de la lumiere diffuse et deux
illustrations qui montrent (a) l image de la rétine sans lumiére diffuse, (b) la méme situation de circulation avec éblouissement par la lumiére diffuse.
ABB. 7. Die Streulichterscheinungen von grellem Licht, und zwei
Abbildungen, die (a) das Netzhautbild ohne Streulicht und (b) dieselbe Verkehrssituation mit grellem Streulicht zeigen.
Other glare causes are receptor adaptation and neural interaction. Glare has been studied intensively by e.g.
HOLLADAY (1927) and Vos & BOUMAN (1959). In broad terms
the so-called Holladay s law is valid and makes it possible to calculate the visual degradation caused by glare.
On top of these two general and major visual de ciencies in night traf c decreased contrast sensitivity and increased glare sensitivity come several more or less common visual problems. One of a somewhat more general nature is night myopia which is studied by several authors e.g. LEIBOWITZ (1977). Rather recently it has become evident that the main cause for night myopia is the regression of the accomodation of the eye in night traf c towards the resting point. This is probably due to the lack of adequate xation points in the improperly illuminated visual eld.
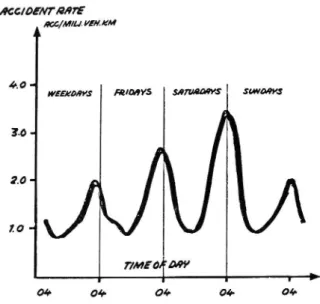
In most developed countries about a third of the traf c is presently carried out at night. This proportion is however probably going to increase since traf c congestion during working hours stimulates transport in other hours that is night. The risk during night traf c is however considerably higher than during daylight. Some gures are given in OECD (1979). Roughly speaking the risk in terms of accidents per million vehicle kilometres seems to be about twice as high in night traf c as in day traf c. In gure 8 is given a graphic account for the risk variation. As can be seen the relative risk increase is even higher during holiday nights probably due to alcohol, fatigue, and different driver populations.
C/Df/Vf ff ace/Mfume .zu 4. 0 -WEEKOHVS mlMY s SRW S' SWM 3 30 -2.0 " Z 0 " MEN-"MV ' " V 04 04 04 04- 04
FIG. 8. The variation of risk (accidents per million vehicle km) in Sweden as related to day and time of day.
FIG. 8. Le changement de risque (accidents par million de véhicule/
km) en Suede par rapport au jour et a l heure.
ABB. 8. Die Veranderung der Gefahr (Verkehrsunfälle je Mill.
Fahrzeugkilometer) in Abhangigkeit von Tag und Zeitpunkt in Schweden.
Some conditions seem to interact with darkness in an unfavourable way. Thus the effect of bad road geometry, rain, and wet roads or ice, snow and slippery roads in night traf c, is such that the relative risk to daylight is increased many times especially for the unprotected road users but also for drivers.
Having the initially mentioned general traf c accident picture in mind it is obvious that the part played by night
traf c accidents is in itself a major health problem. This is
further enhanced by the very high risks and substantially more severe accidents at night.
5. Night traffic countermeasures
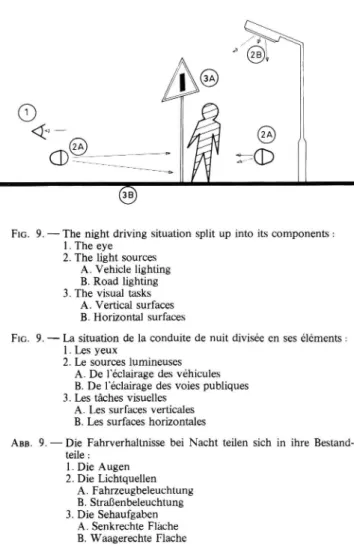
In order to analyze the possible countermeasures in night
traffic more closely an effort is made to split up the situation
into its separate components (see gure 9).
In order to improve the present night driving conditions one or more of these components has to be changed. While the technical components (2 and 3 in the gure) can only be modi ed by better adaptation to human visual characteris-tics, man himself can be attacked at least in three ways. One
way is training in night driving, another is licensing
procedures based also on night traf c vision, and nally there is hope to improve visual performance by special aids.
7
/r 01
A.
G
e
11
FIG. 9. The night driving situation split up into its components :
1. The eye
2. The light sources
A. Vehicle lighting
B. Road lighting 3. The visual tasks
A. Vertical surfaces B. Horizontal surfaces
FIG. 9. La situation de la conduite de nuit divisée en ses éléments :
1. Les yeux
2. Le sources lumineuses
A. De l éclairage des véhicules
B. De l éclairage des voies publiques
3. Les taches visuelles A. Les surfaces verticales B. Les surfaces horizontales
ABB. 9. Die Fahrverhaltnisse bei Nacht teilen sich in ihre
Bestand-teile : ]. Die Augen 2. Die Lichtquellen A. Fahrzeugbeleuchtung B. StraBenbeleuchtung 3. Die Sehaufgaben A. Senkrechte Flache B. Waagerechte Flache
The ef ciency of various measures to improve safety in night driving could be measured directly or indirectly. The only direct measure is of course accident rate. There are several indirect methods of which visibility measurement seems to be the most relevant one (RUMAR, 1973 ; ECONOMO-POULOS, 1978). The alternative measure of visibility some kind of visibility level (BLACKWELL, 1970) or visibility index (GALLAGHER, 1975) has also been used. The visibility level or index seems to indicate the supra-treshold level while the visibility distance indicates the absolute threshold. An unsolved question is what should be seen (size, form,
re ectance factor) and where it should be seen (road type, road surface, distance, speed, observer time).
5.1 . VISION
As mentioned above the human visual system shows
many drawbacks in night traf c. The various efforts to aid
the visual system presented and tested so far (optical lters, glare shield glasses, special adaptation lamps, drugs, etc.) have been unsuccessful in improving vision in real night driving situations. On the other hand every effort should be made to correct visual de ciencies of the eye e.g. myopia, astigmatism. It is suggested that about 10% of the drivers
suffering from night myopia would bene t from correcting their night driving glasses of 0,5 -0,75 D (RICHARDS, 1978). In
most medical examinations for driver s licence around the world there is no test of night driving performance. However it is a well-known fact that interindividual variation in contrast and glare sensitivity is considerable. Results indicate that drivers whose vision is not t for night driving could in the future be picked out at screening tests. Such a selection would have positive but minor effects on night driving safety.
6
Presently night driving is not trained to the extent it should be from accident and dif culty point of View. The ways in which headlighting should be manoeuvred in relation to other road users and road geometry are in no way self evident e.g. to switch to low beam before a curve or a hillcrest. Also the best ways in which information could be detected and identi ed in night driving have to be trained
-e.g. where and how to look for silhouette effects. The
possibility for improvements here is shown by the fact that the night time risk increase for professional drivers is much smaller than that for private drivers. In night traf c drivers are often not aware of how bad their visibility conditions are. Not until an obstacle appears they realize the severity of the
situation. This lack of feed back is dangerous and the
situations should at least be experienced during the training period (e.g. being faced with a dark clothed pedestrian during a low beam meeting). Our night driving vision is bad. Therefore we should learn to use it as well as possible.
5.2. LIGHT SOURCES
In order to make the traf c conditions during night driving correspond to daylight driving various light sources have been introduced. Two different principles are used :
Road lighting illuminating the horizontal road surface. Vehicle lighting illuminating the vertical surfaces of obstacles and other road users.
There can never be a question of either-or, but both systems must be developed and used in different situations. Road lighting works mainly by making obstacles visible as dark silhouettes against a bright road surface (negative contrast) while vehicle lighting uses the opposite principle making the obstacles brighter than the background (positive contrast). Consequently the two systems often counter-balance each other.
The road lighting problem is solved in principle. Here CIE has played and is playing a very important role leading the whole international development (CIE 1973, 1976, 1977) specifying maximum glare, minimum luminance levels and uniformity for various types of roads. Many investigations
(OECD 1971 and 1979, CIE 1960 and 1979A) demonstrate
the positive effect of the introduction of road lighting on the accident reduction in night driving. The favourable effect obtained varies roughly between 30% and 65% accident reduction. The serious injuries and fatal accidents are often reduced even more. The remaining question is how a given sum of money Should be used in an optimum way. Some
experiments by DAHLSTEDT (1973) and RUMAR & YTTERBOM
(1974) seem to indicate that it could be more ef cient to increase the distance between the light sources compared with the present situation. Thereby a longer stretch of road is illuminated but in a less uniform way. This however has to be tested in more elaborated experiments. One road lighting area where CIE has a special leading situation is tunnel
lighting (CIE 1973, 1979B). Special consideration has to be
taken to various lighting installations along the road. A Nordic study (NFM 1977) has proposed limits for glare from
such installations (e.g. petrol stations).
The vehicle lighting problem has several aspects. When the driver is alone on the road he is driving on high beam. HELMERS & RUMAR (1975) have shown how the visibility gain by improving a bad high beam (20,000 cd) to a good modern
high beam (150,000 cd) is considerable ( gure 10) but also
that a heavy increase of intensity by auxiliary lighting does not add very much to visibility.
When the driver is opposed by another vehicle a change from high to low beam shall take place. HELMERS & RUMAR (1975) have Shown how important it is that the intensities of the two opposing high beams are roughly equal. AS soon as one is considerably weaker that driver will dip his lights too
early thereby forcing the other to do the same thing and both drivers will lose visibility. From the above follows that the present minimum intensity of high beam headlights should be increased and a maximum should be speci ed not too far above the minimum.
200-VI SI BI LI TY D I S T A N C E (M )
100-HIGHBEAM INTENSITY (cd x lo")
Y ' I | I
10 20 30 40 50 60 70 80
FIG. 10. Visibility distance to dark obstacles in high beam as a function of headlight luminous intensity.
FIG. 10. La distance de visibilité des objets obscurs avec projecteurs
en feu-route en fonction de l intensité lumineuse des faisceaux.
ABB. 10. Die Sehweite von dunklen Hindernissen bei Fernlicht als Funktion der Scheinwerfer Lichtstarke.
When both oncoming cars are approaching each other using low beam, silhouette effects may appear. JOHANSSON & RUMAR (1971) have shown how very close to visual threshold values such effects normally are and how they vary with road geometry, atmospheric conditions, road surface mate-rial and headlighting distribution. The low beam/ low beam situation is the most dif cult one from visibility point of view. It has been shown in several studies (e.g. JOHANSSON &
RUMAR, 1968) that the present European low beam system in
real traf c situations offers visibility distances about 20-60 meters to dark obstacles while 100 meters should be required considering the normal night driving speeds on our roads
(90-100 km/h). RUMAR (1974A) showed that the introduction
of the halogen bulb improved the situation somewhat but far from solved the visibility problem. The dipping system of the
present low beam (1 % down-wards) makes it very hard to
develop. Less dipping means more glare, more dipping means less visibility.
The Anglo-American low beam distribution with its diffuse cut-off offers roughly the same visiblity as the Continental European low beam with its sharp cut-off. Presently new low beam distributions are being developed and tested. So far it is evident that the low beam can be
improved (HELMERS, RUMAR & YTTERBOM, 1977). But it is
probably not possible to reach the 100 meter visibility in real traf c situations (see gure 1 1). In order to pass that limit the only solution recognizable is the polarized headlights (JOHANSSON & RUMAR, 1970). This way visibility distances about 150 meters can be obtained without increased glare.
In recent years there has been much discussion about having a special beam in order to make the vehicle visible running light. The running light should be used in daylight
driving and in dawn and dusk. RUMAR (1978) describes the
studies behind the Finnish and Swedish decisions to have
compulsory running lights (low beam) during daylight. The accident reduction estimation is considerable 20 % of multi-vehicle daylight collisions (see table 1).
., PERCENT
75
25~
VISIBILITY DISTANCE(m) _
5'o 7'5 160 155 1750 17'5 zbo '
FIG. 1 1. Calculated cumulative visibility distances for low beam/ low
situations on a real two lane road. (a) is a standard European halogen low beam, (b) is a modi ed halogen low beam.
FIG. 1 l. - La distance de visibilité cumulative calculée pour des
situations de feu de croisement/ feu de croisement sur une route a deux pistes.
(a) est un feu de croisement a iode de standard européen, (b) est un feu de croisement a iode modi é.
ABB. 1 1. Berechnete, kumulative Sehweiten fur Abblendlicht :
Ab-blendlichtsituationen auf einer StraBe mit zwei Fahrestreifen. (a) ist ein
Nor-maleuropäisches Halogen-Abblendlicht, (b) ist ein modi ziertes
Halogen-Ab-blendlicht.
Daylight Night
(D) (N)
Multiple vehicle accidents (M) 32 % 4 % Single vehicle accidents (S) 4 % + 6 %
MD
_ MN
X _ SD SN
Years X
Running lights campaign 1968-70 2.23 Running lights recommended 1970-72 1.88 21 % Running lights compulsory 1972 74 1.76
TABLE l. Summary of the results from an accident analysis of the
Finnish daylight low beam (running light) periods. Based on the balanced ratio (x) daylight multiple vehicle accidents (MD) decreased by 21 % from the campaign period to the compulsory period.
TABLEAU l. Sommaire des résultats d une analyse d accidents en
périodes de feu de croisement (running light) en plein jour en Finlande. Fondé sur le rapport moyen (x), le nombre des accidents multiple de véhicule en plein jour (MD) a été réduit de 21 % dela période de campagne jusqu a la période obligatoire.
TABEILE l. ZusammenfaBung der ErgebniBe aus einer Unfallsanalyse
der nnischen Tageslicht - Abblendlicht (Fahrlicht) - Periode . Basierend
auf dem ausgeglichen Verhaltnis (x) hat die Anzahl von
Mehrfahrzeugen-unfallen bei Tag (MD) um 21 % abgenommen von der Kampagneperiod an bis zur obligatorischen Periode.
Regarding vehicle headlighting CIE has not been as successful as in roadway lighting. It has not been possible to solve the European-American conflict of low beam distribu-tion and high beam intensity. CIE is not leading and hardly taking part in the future development.
5.3. THE VISUAL TASKS
Since the light sources are divided into vertical and horizontal ones it is also natural to divide the visual tasks into those comprising vertical and those comprising horizontal surfaces. Finally there are the stimuli that are not seen in re ected light but are luminous themselves (light Signals).
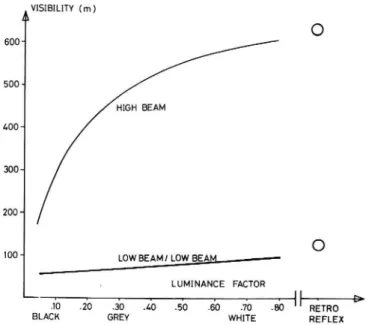
The visibility of vertical surfaces (obstacles) in vehicle lighting is very much in uenced by the luminance factor of the obstacle. RUMAR (1974A) presented the results Shown in gure 12. It should be noted in the gure that a person completely dressed in black with a small thumbsized retro-re ective tab is detected at longer distances than a person completely dressed in white. This is a good illustration of the effect of retro-re ective materials. By using this kind Of material much higher contrasts in the visual eld are obtained and thereby the lowered contrast sensitivity of the human eye at levels Of night driving illumination is compensated for (BERGGRUND & RUMAR, 1975). Of course retro-re ective material Should be used on all surfaces that are important to detect but which are not possible or suitable to illuminate separately e.g. road Signs. New retro-re ective materials have appearetro-red retro-recently that aretro-re so good that in some situations the same road Sign legibility is obtained as with separetely illuminated signs (RUMAR & OST, 1975. CIE (1978) gives guidelines for illumination of road Signs.
In road lighting the re ective properties Of the road surface
are very important (DE BOER & WASTERMAN, 1964, NFM
1978). From an economic point of view it often pays to use bright surfacing materials instead of increasing the illumina-tion level. For road visibility in vehicle lighting the brightness of the road is also important. But the relation between obstacle visibility and road surface characteristics in vehicle lighting is not that simple. HELMERS & RUMAR (1974) have measured obstacle visibility during low beam meetings on dark and bright smooth and rough, wet and dry road surfaces. It is Shown that the critical condition is, irrespective of brightness, the smooth wet road surface. The light from the dipped low beam is re ected in the wet smooth road that almost works like a mirror. Thereby the oncoming driver is subjected to up to ve times as much glare as on a dry road. Consequently roads Should be given rough surfaces. New road surfaces with drainage properties are presently develo-ped. They should be very attractive both from road lighting and from vehicle lighting point of view. Road delineation (markings and markers) is also hampered by rain. CIE work in the road surface and marking area is presently in progress. Signal lights constitute a minor problem in night driving. They are much better visible than in daylight. The only risk iS that they Shall be perceived as so intensive that they are glaring. But it is only in connection with rear fog lighting and beacons for emergency vehicles that this has been reported as
a problem. RUMAR (1974B) Showed that the blue beacons for
emergency vehicles are less visible than orange and red ones in good daylight conditions but in darkness they are so well visible that they cause discomfort glare.
The vehicle Signal system has not really followed the development of the rest of the vehicle. COLE, DAIN & FISHER (1977) give a review of practice and suggestions for possible improvements. One promising idea is the high mounted brake light which in US studies has given considerable rear end accident reduction.
In the area of traf c lights a CIE subcommittee has recently written the rst really comprehensive technical
paper (CIE 1979C). This publication will in uence the
inter-national development in traf c lights for many years to come.
In the area of vehicle signals CIE again is not too active and consequently not at all leading. The present situation is very confused and internationally heterogeneous. The
re-search results necessary are to a large extent available but not assembled and not analyzed in a larger picture. A world wide harmonization could be possible and CIE could play an important role here.
I VISIBILITY (m) soo- 500-HIGH BEAM 400 300
200-100 - LOW BEAM! LOW BEA
. LUMINANCE FACTOR
.10 .20 .3'0 .it) 56 .s'o .7'0 .Bb' RETRO
BLACK GREY WHITE REFLEX
FIG. 12. Illustration of the effect of the luminance factor of obstacles
and especially retrore ections (6 mcd/ cmz/ lux) on visibility distances in high
and low beam.
FIG. 12. Illustration de l effet du facteur de luminance des objets et
particulierement des catadioptres (6 mcd/ cmz/ lux) aux distances de visibilité sous feux de route et feux de croisement.
ABB. 12. EinfluB des Leuchtdichtefaktors von HinderniBe und
be-sonders bei Ruckstrahlung (6 mcd/ cmz/ Lux) auf die Sehweite bei Fern- und Abblendlicht.
I APPUED | |BA9C | | COORmNAuONl ROAD UGHHNG
VEHON
COORmNKKH? VEHmLE HEADUGHTS RELAHONSHP
OCCidents
beh°v'° r SIGNALS ROAO a. VEHICLE
UGHT SOURCES
ROAD
LAyout MARNNGS, aGNs,
FIG. 13. A suggestion for organization of CIE activities in the road
traffic sector. Each frame indicates a technical committee (TC). The sector coordinator is chairman of the relationship committee.
FIG. 13. Une proposition d organisation des activités de la CIE dans le
domaine de la circulation routiere. Chaque cadre représente un comité
technique (TC). Le coordonnateur du secteur sera le president de la commis-sion de parenté.
ABB. 13. Ein Vorschlag fur die Organisation des CIE-Arbeitsgebiets
im StraBenverkehrssektor. Jeder Rahmen zeigt ein technisches Komitee (TC) an. Der Koordinator des Sektors ist der Vorsitzende des
Zusammenarbeits-komitees.
6. Final remarks
The present CIE organization with Technical Committees,
Subcommittees, Working Groups, Study Groups, etc., has
gradually grown to the structure it now has. It is in fact not really logical and probably not as effective as it could be. Some problems fall between committees, others are dealt
with in more than one committee, the coordination is not always good. One intention with the present paper is to initiate a discussion Of CIE activities and organization within road traf c.
In gure 13 is given a suggestion of how the CIE
committee work could be organized in order really to cover the road traf c area effectively. The committee work within the sector is headed by a coordinator and is divided into a basic and an applied part. Corresponding constructions could be set up within other CIE interest areas.
References
BERGGRUND U. & RUMAR. K., Studies of retrore ective material for pedestrians (mimeograph report in Swedish). Dept. of Psychology, University of Uppsala, Sweden (1975).
BERGSTRÖM, S.-S., Motion. Report from the Swedish Broadcasting
Corpora-tion, Stockholm (in Swedish (1978).
BLACKWELL, H. R., Contrast threshold. J. Opt. Soc. Am. 36 : 624-643 (1946). BLACKWELL, H. R., Development of procedures and instruments for visual
task evaluation. Illum. Engn. 65 : 267-291 (1970).
DE BOER J. B. & WESTERMAN H. D., Die Untersuchung von StraBenbelagen nach Reflexionskennwerten und durch Bedeutung fur die
StraBenbe-leuchtung. Lichttechnik 16, 10 : 487-492 (1964).
BROADBENT D. E., Perception and communication. London, Pergamon Press (1958).
BRUNSWlK E., Representative design and probabilistic theory in a functional psychology. Psycho]. Review 62 : 193-217 (1955).
CALVERT E. S., Visual aids for landing in bad visibility. Trans. Ill. Eng. Soc. London 15: 183-219 (1950).
COLE B. L., DAlN S. J. & FISHER A. J., Study of motor vehicle signal systems.
Project 73/844, Dept of Transport, Commonwealth of Australia (1977).
Commission Internationale de l Eclairage, Street lighting and accident. Publication No. 8, CIE, Paris (1960).
Commission Internationale de l Eclairage, International recommendations
for motorway lighting. Publication No. 23, CIE, Paris (1973A).
Commission Internationale de l'Eclairage, International recommendations
for tunnel lighting. Publication No. 26, CIE, Paris (1973B).
Commission Internationale de l'Eclairage, Glare and uniformity in road lighting installation. Publication No. 31, CIE, Paris (1976).
Commission Internationale de l'Eclairage, Recommendations for the lighting of roads for motorized traf c. Publication No. 12.2, CIE, Paris (1977). Commission Internationale de l Eclairage, Lighting of traf c signs.
Publication No. 35, CIE, Paris (1978).
Commission Internationale de l'Eclairage, Street lighting and accidents. Publication No. 8.2 (under preparation) (1979A).
Commission Internationale de l'Eclairage, International recommendations
for tunnel lighting. Publication No. 26.2 (under preparation) (1979B). Commission Internationale de l Eclairage, Light signals for road traf c
control (under preparation) (1979C).
DAWSON P. A., The role of drivers vision in road safety. Lighting Research & Technology 10, 3 : 125-139.
DAHLSTEDT S., Estimation of pedestrian conspicuity in various road lighting installations (in Swedish). National Swedish Road Safety Of ce. Borlänge, Sweden, Bio : grp PM No. 12 (1973).
ECONOMOPOULOS I. A., Photometric parameters and visual performance in
road l)ighting. Dissertation at Eindhoven Technical University Holland
(1978 .
FORBES T. W., A study of traf c sign requirements. Michigan State University U.S.A. (1964).
GALLAGHER V. P., A visibility metric for safe lighting of city streets. Frankling Institute. Research Laboratories, Philadelphia, U.S.A. (1975). GIBSON J. J ., The senses considered as perceptual systems. Houghton Mif in,
Boston. U.S.A. (1966).
HELMERS G. & RUMAR K., Obstacle visibility in rural night driving as related to road surface re exive qualities. Transportation Research Record 502 : 58-69 (1974).
HELMERS G. & RUMAR K. High beam intensity and obstacle visibility. Lighting
Research & Technology 7, l : 35-42 (1975).
HELMERS G., RUMAR K. & YTTERBOM U., Optimizing low beam light
distribution (in Swedish). National Swedish Road and Traf c Research Institute, Linköping, Sweden (1977).
HOLLADAY L. L., Action of a light source in the eld of view in lowering
visibility. J. Opt. Soc. Amer. 14 : 1-9 (1927).
JOHANSSON G., Rigidity, stability, and motion in perceptual space. Acta Psychologica 14 : 359-370 (1958).
JOH/(ANSSOISJ G., Visual motion perception. Scientific American, June: 76 88 1975 .
JOHANSSON G. & RUMAR K., Drivers and road Signs : A preliminary investigation of the capacity of car drivers to get information from road
signs. Ergonomics 9, 1 : 57 82 (1966).
JOHANSSON G. & RUMAR K., Visible distances and safe approach speeds for
night driving. Ergonomics 11, 3 : 275-282 (1968).
JOHANSSON G. & RUMAR K., A new polarized headlight system. Lighting
Research & Technology 2. l : 28-32 (1970).
JOHANSSON G. & RUMAR K., Silhouette effects in night driving. Scand. J.
Psycho]. 12: 80-89 (1971).
LEE D. N. & LlSHMAN R., Visual control of locomotion. Scand. J. Psychol.
18: 224-230 (1977).
LElBOWlTZ H., Nighttime driving accidents and selective visual degradation. Science 197 : 422 (1977).
NMF, Glare from lighting installations along roads (in Scandinavian) Nordic Research Group on Visual Conditions in Night Traffic, Report 1 (1977). NMF, Light reflection properties of road surfaces. Nordic Research Group
on Visual Conditions in Night Traf c, Report 2 (1978).
OECD, Lighting, visibility and accidents. OECD Road Research Report, Paris (1971).
OECD, Improving road safety at nigh. OECD Road Research Report (under preparation), Paris (1979).
RICHARDS 0. W., Visual needs and possibilities for night automobile driving. American Optical Corporation, Southbridge, Mass, U.S.A. (1967). RlCHARDS 0. W., Night myopia at night automobile luminances. Am. J.
Optom. & Physio/. Optics 55, 7 : 469-470 (1978).
ROCKWELL T. H. et al., The utility of peripheral vision to motor vehicle drivers. Ohio State University, U.S.A. (1977).
RUMAR K., Measurement of critical visibility (in Swedish). Lampetten 3 : 182-187 (1973).
RUMAR K., Visibility distance with halogen and conventional headlights. Scand. J. Psychol. 15 : 21-25 (1974A).
RUMAR K., Conspicuity of beacons for emergency vehicles. Report 152. Dept. of Psychol., University of Uppsala, Sweden (1974B).
RUMAR K., Running lights - conspicuity, glare and accident reduction. National Swedish Road and Traf c Research Institute, Linköping, Sweden (1978).
RUMAR K. & BERGGRUND U., Overtaking performance under controlled conditions. Paper presented at the First International Conference on Driver Behaviour, Zurich (1973).
RUMAR K. & YTTERBOM U., Development of a road lighting Simulator and a study of the effect of luminance level and luminance uniformity on obstacle visibility (in Swedish). Mimeographed report, Depart. of Psychol., University of Uppsala, Sweden, 22 pp. (1974).
RUMAR K. & OST A., Some studies of retroreflective materials on road signs from the driver s perceptual point of view. Report at the XVth World Road Conference, Mexico City (1975).
VOS J. J. & BOUMAN M. A., Disability glare: Theory and practice. Compte Rendu, l4th Session of CIE, Vol. B : 298-307 (1959).
Discussion P. MASSART (Belgium) :
]) Does not the extended use of halogen sources give a solution to the problems of headlights, due to possibility of a better light control?
2) Is not the question of ef cient headlights more a mechanical problem (car balance - road pro le) conside-ring that light control may be solved?
Is the CIE able to solve this problem alone?
AUTHOR :
1) The halogen lamp, although an excellent source, has not been used in an optimal way. In high beam the halogen lamp means a visibility improvement of roughly 30%. But in low beam the improvement is, due to the sharp cut-off, only of the order of 10%. It has not solved the low beam dilemma.
2) The light control problem remains concerning the meeting beam. The meeting light problem will never be solved by the low beam (dipping) principle. It has to be solved in some other way c.q. by the principle of polarized light.
H. R. BLACKWELL (U.S.A.):
TC-3.l now knows that ocular stray light producing the disability glare effect increases by approximately 3 times with age due primarily to scattering in the ocular lens. Also that ocular stray light is approximately 1.5 times as great as previously believed at levels of roadway lighting in compari-son with levels of interior lighting. Thus, calculations of the disability glare effect to be expected under different condi-tions carried out by the Stiles-Holladay equation need to be modi ed.
AUTHOR :
We have used a slightly modi ed form of the
Stiles-Holladay equation in our Nordic suggestion for disability
glare limits for light sources in the vicinity of the road (c.q. petrol stations) and we have experimental results supporting this.
D A. SCHREUDER (The Netherlands):
1) How can you state that contrast sensitivity is the (most
important) basic function in night time driving as long as we do not know what the relevant objects are?
2) I would like to stress the need for (continuing)
co-operation and liaison with other bodies dealing with a.o. road construction and traf c operation.
AUTHOR :
1) I stated that contrast sensitivity is probably the most important visual function. I agree that we do not know this but evidence points in that direction.
2) I fully agree that co-operation should be close with other international bodies within the road traf c area. In my outline of a modi ed CIE organization within the road traf c sector this should be the responsibility of the
Coordination Committee. D. M. FINCH (U.S.A.):
Since the accident correlation with lighting in general is very low, what other measures of performance are available
10
to justify the improvements needed in vehicle and other
exterior lights? AUTHOR :
You are touching a weak point here. Accidents are an unreliable criterium and still it is the only measure with clear validity. But often we have to use performance and behavioural measures like visibility distance, visibility level, driving speed. speed variability, lane position, etc. Such measures often have good reliability but we do not know their validity.
D. L. DlLAURA (U.S.A.):
Can you explain the large accident reduction rate due to running light usage in Finland? Have any hypotheses been made?
AUTHOR :
From the visual performance experiments carried out before introduction of the running lights the following hypothesis has been made. When a vehicle appears when we expect it to appear it is detected in central vision and the effect of running lights is probably marginal. But when it appears where we do not expect it the risk for an accident is high and now it has to be detected in peripheral vision. In peripheral vision the running lights have a considerable effect on vehicle conspicuity.