SÄKERHETSFUNKTIONER TILL
BRÄNSLEHANTERINGSMASKIN
ER
Funktioner och hårdvarukomponenter som ser till att förflyttning av
bränslepatroner sker säkert.
CHARLIE LINDQUIST
Akademin för ekonomi, samhälle och teknik
Kurs: Examensarbete, Energiteknik Kurskod: ERA206
Ämne: Energiteknik Högskolepoäng: 15 hp
Program: Energiingenjörsprogrammet i elektroteknik
Handledare: Maher Azaza Examinator: Erik Dahlquist
Uppdragsgivare: Westinghouse Electric Sweden AB
Datum: 2018-06-11 E-post:
ABSTRACT
This degree project aims to update today's nuclear power plants based on the new directives, regulations and standards. This assignment is given by
Westinghouse Electric Sweden AB and the work is to implement a safety system (PLC) for their fuel handling machines. The safety system is an extension of the already existing operating system that is currently controlling the process. In order for it to be a safety system, the two systems can not interfere in any way. Therefore, special components will be selected to ensure that this does not happen. The safety system is about adding safety features that will control the bridge's movement in a certain direction, speed, and the amount of force that acts on the lifting crane. In order to achieve this, a conceptual scheme will first be made to get an understanding of how the system works and what
components will fit best in to accomplish this. Thereafter, the selection of components will be made and then entered into the program SISTEMA for approval. The system will comply with the PL (Performance Level) standard that determines the risk reduction required. PL is divided into PL a to e where PLe stands for the highest safety classification. For the system to be safe enough, the classification must be PLd or PLe. All Components gets their own classification depending on how they are built. When all components are included in the functions, based on the components classification SISTEMA will assign the entire function's safety classification. The first attempt on the motion function received a classification of PLb but since it is too low SISTEMA is protesting. The next attempt on the function manages to achieve a PLe classification by replacing some components to others with additional built-in features that makes them extra safe. The speed function gets a safety classification of PLd because the component called resolver that is used only supports PLd, this will lower the entire system's safety classification to the same. An encoder could be used instead of the resolver, but unlike the resolver the encoder can’t read its position. Since the encoder can’t read its own position, multiple components are needed to perform the same job.
Keywords: Function, safety, component, movement, speed, limit switch, contactor, relay, fuel, current.
FÖRORD
Detta är ett examensarbete som är utfört på Westinghouse Electric Sweden AB. Arbetet uppkom då nya direktiv, föreskrifter och standarder genomfördes. Arbetet är skrivet av Charlie Lindquist från Mälardalens högskola inom programmet Energiingenjör elektroteknik.
Jag skulle vilja tacka Westinghouse för möjligheten att skriva mitt
examensarbete hos er, det har varit väldigt roligt och lärorikt att få vara här. Främst vill jag tacka mina handledare Lina Marcus, Roland Kalnins från Westinghouse för all hjälp som ni har gett mig.
Västerås i juni 2018
SAMMANFATTNING
Detta examensarbete går ut på att modernisera dagens kärnkraftsanläggningar utifrån de nya direktiven, föreskrifterna och standarder. Uppdraget kommer från Westinghouse Electric Sweden AB och arbetet består av att implementera ett säkerhetssystem (PLC) för deras bränslehanteringsmaskiner.
Säkerhetssystemet är en påbyggnad av det redan existerande driftsystemet som för närvarande styr processen. För att uppfylla kraven på ett säkerhetssystem får de två systemen inte påverka varandra på något sätt. Därför kommer speciella komponenter väljas som säkerställer att detta inte sker.
Bränslehanteringsmaskinen förflyttar bränslepatronerna som är placerade både i och utanför reaktorn. Dessa bränslepatroner ska flyttas en gång varje år och ska då placeras på den mest effektivt beräknade platsen i reaktorn.
Hanteringsmaskinen samt den lyftkran som lyfter ner och upp
bränslepatronerna ur reaktorn är monterade på en travers. Denna kan röra sig i alla riktningar.
Säkerhetssystemet införs för att lägga till säkerhetsfunktioner för att kontrollera bryggans rörelse i en viss riktning, dess rörelsehastighet samt hur mycket kraft som verkar på lyftkranen. För att åstadkomma detta görs först ett konceptuellt schema för att få förståelse för hur systemet ska fungera och vilka komponenter som behövs. Därefter görs val av komponenter och sedan läggs in i SISTEMA för godkännande.
Systemet kommer att följa standarden PL (Performance Level) som bestämmer vilken riskreduktion som behövs. PL är uppdelad i PL a till e där PLe står för den högsta säkerhetsklassningen. För att systemet ska vara tillräckligt säkert måste klassningen vara PLd eller PLe. Alla Komponenter får en klassning beroende på hur de är uppbyggda. När alla komponenter är inlagda i funktionerna kommer programmet SISTEMA baserat på komponenternas klassningar att
säkerhetsklassa hela funktionen.
Rörelsefunktionen fick vid ett första försök klassningen PLb men eftersom det är för lågt protesterar SISTEMA. Efter utbyte av några komponenter blev
klassningen högre och uppnådde vid nästa försök klassningen PLe. Detta eftersom de utbytta komponenterna valdes på grund av de extra inbyggda funktionerna gör dem extra säkra. Hastighetsfunktionen får
säkerhetsklassningen PLd då en komponent kallad resolver som används har klassningen PLd, detta dra ner hela systemets klassning till densamma. En
pulsgivare skulle kunna användas istället för resolvern men då pulsgivaren inte klarar av att avläsa position som resolvern kan så krävs det flera komponenter för att utföra samma jobb.
Funktionerna hade kunnat programmeras och realiserats om den beställda PLC’n hade anlänt i tid, men då leveransen blev försenad avslutades arbetet när SISTEMA godkänt funktionerna.
Nyckelord: Funktion, säkerhet, komponent, rörelse, hastighet, gränslägesbrytare, kontaktor, relä, bränsle, ström.
INNEHÅLL
1 INLEDNING...1 1.1 Bakgrund...1 1.1.1 Kärnkraft...2 1.1.2 Elproduktion...2 1.1.3 Säkerhet...2 1.1.4 Miljö...3 1.2 Syfte... 3 1.3 Frågeställningar...3 1.4 Avgränsning...3 2 METOD...4 3 LITTERATURSTUDIE...4 3.1 PLC... 6 3.2 PL säkerhetsklassning...6 3.2.1 Kategori...7 3.2.2 DC, MTTFD och CCF...8 3.3 Hårdvarukomponenter...9 3.3.1 Kontaktor/Relä...9 3.3.2 Frekvensomriktare...9 3.3.3 Pulsgivare...9 3.3.4 Resolver...10 3.3.5 Gränslägesbrytare...10 3.3.6 Omvandlare...11 3.3.7 Lastcell...11 4 AKTUELL STUDIE...11 4.1 Funktioner...114.1.1 Rörelse i riktning mot kanterna av poolen...12
4.1.2 Hastighet mot kanterna av poolen...13
5 RESULTAT...17 5.1 Konceptuella scheman...17 5.2 Rörelsefunktion...19 5.3 Hastighetsfunktion...21 6 DISKUSSION...22 7 SLUTSATSER...23
8 FÖRSLAG TILL FORTSATT ARBETE...24
REFERENSER...25
FIGURFÖRTECKNING
Figur 1 Säkerhet och drift PLC...1Figur 2 Bränslekuts, bränslepatron, kapslingsrör (Analys, 2016)...5
Figur 3 Reaktorhall Oskarshamn...6
Figur 4 Riskgraf... 7
Figur 5 Resolver... 10
Figur 6 Exempel på gränslägesbrytare...11
Figur 7 Konceptuellt schema, rörelsefunktion...13
Figur 8 Rörelsefunktion, pool...13
Figur 9 Konceptuellt schema, hastighetsfunktion...14
Figur 10 Hastighetsfunktion, pool...15
Figur 11 Konceptuellt schema, kraftfunktion...16
Figur 12 Resultat Schema rörelse...17
Figur 13 Resultat schema hastighet...18
Figur 14 Resultat schema kraft...19
Figur 15 Rörelsefunktion, misslyckad...20
Figur 16 Rörelsefunktion, komponentuppbyggnad...21
TABELLFÖRTECKNING
Tabell 1 PL, Risktabell... 7
Tabell 2 Säkerhetsklassning parametrar...8
Tabell 3 Resultat, rörelsefunktion misslyckad...19
Tabell 4 Resultat, rörelsefunktion...20
Tabell 5 Resultat, hastighetsfunktion...21
BETECKNINGAR
Beteckning Beskrivning Enhet
E Energi Wh I Ström A P Effekt W R Resistans Ω U Spänning V
FÖRKORTNINGAR
Förkortnin g BeskrivningPLc Performance level klass c PLd Performance level klass d PLe Performance level klass e PLC Programmable logic controller DC Diagnostic coverage
MTTFD Mean time to dangerous failure CCF Common cause failure
KTA Kerntechnischer Ausschuss
ISO Internationella standardiseringsorganisationen
IEEE Institute of Electrical and Electronics Engineers
DEFINITIONER
Definition Beskrivning Lättvatten Vanligt vatten
SISTEMA Program som beräknar säkerhetsklassning för ett system
Galvanisk isolering
Signaler ska kunna överföras men stora spänningar på grund av fel (kortslutningar, läckströmmar, störningar mm) ska isoleras bort.
1
INLEDNING
Ett flertal kärntekniska anläggningar behöver i närtid modernisera eller byta ut befintliga bränslehanteringsmaskiner. De säkerhetskrav som var aktuella vid nybyggnation och vid senare moderniseringar skiljer sig från dagens krav. För att kunna offerera nya bränslehanteringsmaskiner till svenska och nordiska kärnkraftverk har Westinghouse identifierat ett antal direktiv, föreskrifter och standarder. Av dessa är maskindirektivet ISO 13849 och KTA 3902 som utgör grunden för detta arbete.
Enligt dessa föreskrifter ska dagens bränslehanteringsmaskiner utrustas med ett antal säkerhetsfunktioner utöver ordinarie driftsfunktioner.
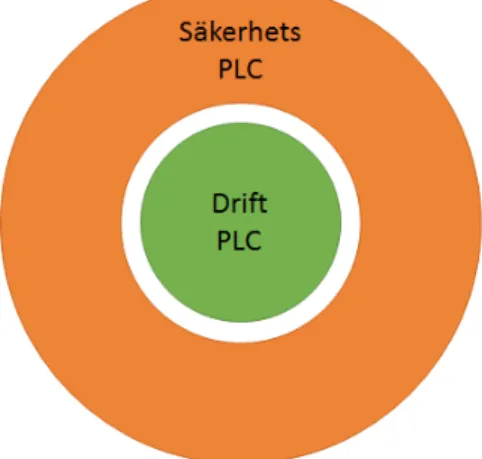
Säkerhetsfunktionerna ska hantera både maskinsäkerhet och nukleär säkerhet och uppgår idag till 16 stycken. För att lösa detta har Westinghouse i dagsläget valt en design som består av två från varandra skilda styrsystem (PLC), varav den ena sköter samtliga driftsfunktioner som behövs vid förflyttning av bränsle. Den andra PLC’n hanterar samtliga säkerhetsfunktioner som identifierats i KTA 3902. Säkerhetskontrollen ska i princip övervaka de operationer som utförs av driftkontrollern, se Figur 1 och samtidigt vara funktionellt och fysiskt separerad från driftkontrollern. I denna rapport beskrivs hur dessa säkerhetsfunktioner kan realiseras. Dessa funktioner kommer att byggas upp av olika
Figur 1 Säkerhet och drift PLC
1.1
Bakgrund
Westinghouse Electric Sweden AB är idag världsledande inom
kärnkraftsteknologi med över 10 000 medarbetare i 18 länder. År 1969
grundades verksamheten ASEA Atom men blev sedan uppköpt år 2000 av det amerikanska bolaget Westinghouse Electric Company. Sedan start har ASEA Atom/Westinghouse byggt upp 14 kärnkraftverk i Norden varav 12 stycken som fortfarande är i drift. (Westinghouse 2018)
1.1.1
Kärnkraft
Ett kärnkraftverk utvinner energi genom att klyva atomkärnor, denna process kallas fission. Klyvningen av atomer skickar ut värme som används för att värma upp vatten tills ånga bildas, ångan driver i sin tur en turbin som i sin tur driver en generator som producerar elen (Vattenfall 2014). Det naturliga uranet består av två olika isotoper, den största delen består av 99,3 % uran-238 och 0,7 % uran-235. Endast uran-235 kan klyvas och därför måste andelen uran-235 ökas, denna process kallas anrikning (Illvet 2012, Roboteq 2017). Uranet klyvs genom att en neutron kolliderar med atomen, när kärnan klyvs skickas nya neutroner ut och bildar en kedjereaktion. Neutronerna bromsas upp via lättvatten och dessa reaktorer kallas därför för lättvattenreaktorer (Strålsäkerhetsmyndigheten 2017). Klyvningen sker i en så kallad reaktor. Processen i reaktorn är mycket effektiv och 25 ton anrikat uran räcker för ett års drift. Motsvarande
elproduktion från kol eller olja skulle kräva 1 500 000 ton kol respektive 1 000 000 ton olja (ROK 1995).
1.1.2
Elproduktion
Idag producerar Sverige cirka 140-150 TWh el, de ledande kraftslagen i Sverige är vattenkraft och kärnkraft som vardera står för cirka 40 % av den totala
elproduktionen. (Ekonomifakta 2017). Det använda kärnbränslet är radioaktivt och kräver lagring under mycket lång tid, till skillnad från vattenkraft är
kärnkraft inte förnybart men det har mycket låga klimatutsläpp och en utav de lägre elproduktionskostnaderna (Energiföretagen 2017). För att driva de svenska kärnkraftverken går det åt cirka 1500 ton naturligt uran per år, det motsvarar cirka 200 ton anrikat uran (Strålsäkerhetsmyndigheten 2017).
1.1.3
Säkerhet
Vid konstruktion av en bränslehanteringsmaskin måste både nukleär säkerhet och maskinsäkerhet beaktas. Nukleär säkerhet handlar främst om att förhindra spridning av radioaktivt material till tredje man. Maskinsäkerhet hanterar personal- och anläggningssäkerhet, det vill säga sannolikhet och minimering av antalet farliga fel för personal och anläggning.
I Sverige tillämpas främst säkerhetskategorierna cat A, cat B, cat C enligt IEC 61 226 eller 1E, 2E och 3E enligt IEEE för nukleär säkerhet, varav cat A och 1E är de högsta säkerhetsklasserna för elkomponenter. I Finland tillämpas
säkerhetsklasserna SC1, SC2 eller SC3 enligt YVL guiderna, där klass SC1 utgör den högsta säkerhetsklassen. För maskinsäkerhet tillämpas säkerhetsnivåerna PLe, PLd, och PLc, varav PLe är högst.
Samtliga av de identifierade 16 säkerhetsfunktionerna har säkerhetsklass SC3 eller 3E med avseende på nukleär säkerhet och klass PLe till och med PLc med avseende på maskinsäkerhet. Observera att detta exjobb inte har som syfte att verifiera den nukleära säkerhetsklassen, vilken för närvarande är utredd
Westinghouse.
1.1.4
Miljö
Framställningen av kärnbränsle är det som påverkar miljön mest, framför allt uranbrytningen. Uranmalmen behandlas med svavelsyra, ammoniak och andra kemikalier, detta resulterar i radioaktivt avfall. El- och bränsleförbrukningen spelar också stor roll. När uranoxiden anrikas används två olika metoder, gasdiffusion och gascentrifug. Den största delen av bränslet produceras med gascentrifugprocessen som kräver betydligt mindre el. (Vattenfall 2015).
Urancentrifugen fungerar genom att uranmalmen löses upp i syra och genomgår kemiska processer tills man får uranhexafluorid. Uranhexafluoridgasen slungas runt med hög hastighet och centrifugalkraften gör att uran-238 hamnar ytters i centrifugen och uran-235 hamnar innerst. På så sätt kan molekylerna sorteras (Illvet 2012).
Drift för ett kärnkraftverk påverkar inte miljön lika mycket som framställningen men produktionen av kemikalier samt transporter orsakar utsläpp av
växter och djur då vattnet i havsområdet närmast kraftverket värms upp med omkring 10 grader (Vattenfall 2015).
1.2
Syfte
Det slutliga målet med examensarbetet är att realisera och bygga upp ett fåtal av maskinens säkerhetsfunktioner i enheter som tillsammans bildar en mätkedja eller funktion som ska uppnå en viss säkerhetsnivå enligt de säkerhetsnivåer som finns beskrivna i maskinsäkerhetsdirektivet, det vill säga PLe och PLd.
1.3
Frågeställningar
- Hur bygger vi upp funktionerna? - Vilka komponenter ska väljas?
- Hur uppnås den tilltänkta säkerhetsnivån? - Vad händer om kraven inte uppfylls?
1.4
Avgränsning
Arbetet gäller bränslehanteringsmaskinens säkerhetsfunktioner så som de är definierade av Westinghouse, avdelning P, vilka för tillfället uppgår till 16 funktioner men arbetet kommer bara handla om de tre nedan.
Rörelsefunktionen Hastighetsfunktionen Kraftfunktionen
På grund av förseningar hos leverantör kommer PLC’n inte komma fram i tid till arbetet, därför görs ingen programmering.
2
METOD
Funktionernas säkerhetsnivå med avseende på maskinsäkerhet verifieras i SISTEMA. För att förstå processen om hur hantering av bränslet går till ställs frågor till personal på Westinghouse inom respektive kunskapsområde.
Arbetet börjar med att de nya säkerhetsfunktionerna som ska införas ritas upp i ett konceptuellt schema. Från det konceptuella schemat väljs komponenter som uppfyller säkerhetskraven för funktionerna. När komponenterna är valda kan funktionerna med respektive komponenter införas i programmet SISTEMA, där det utvärderas om säkerhetskraven är uppfyllda. När funktionernas
säkerhetsnivå verifierats kan de i framtiden programmeras in i en PLC.
3
LITTERATURSTUDIE
Bränslehanteringsmaskinen rör sig som en travers ovanför en stor pool där bränslepatronerna förflyttas under vattnet för att minska strålning. Den nya PLC’n kommer t.ex. att säkerställa att hanteringsmaskinen inte kommer för nära kanterna på poolen, att maskinen inte går för långt ner under vattnet då den kan slå i botten eller att den rör sig för högt upp och riskerar att patronerna kommer ovanför vattenytan.
Hårdvarukomponenterna nämna nedan är de olika möjligheterna att välja för att SISTEMA ska godkänna systemet. Det finns flera olika varianter av dessa
komponenter, både på utseende och funktion. För att SISTEMA ska kunna godkänna systemet måste varje komponent vara PLe/PLd klassad.
En bränslepatron är ett rektangulärt block som är en sammansättning av cirka 100 stycken kapslingsrör som innehåller bränslekutsar. Bränslekutsar är ett hoppressat pulver med cylindrisk form som kommer från urandioxid.
Urandioxidet kommer från kemiska processer vid anrikning av uranet.
(Strålsäkerhetsmyndigheten 2017). Bränslepatronerna sitter i reaktorn under först ett filter (Dessa filter ser till så att all kvarstående vätska filtreras bort så att endast ångan kvarstår) och sedan under ångseparatorer. För att kunna byta ut patronerna måste först reaktorlocket öppnas, filtren samt ångseparatorerna måste tas upp ur reaktorn för att sist komma åt patronerna. Figur 2 visar en bränslekuts, ett kapslingsrör med tillhörande kutsar samt en bränslepatron.
Figur 2 Bränslekuts, bränslepatron, kapslingsrör (Analys, 2016)
Cirka en femtedel av bränslepatronerna byts ut en gång varje år och hela
processen tar cirka en vecka att utföra. Poolen där patronerna förvaras har flera sektioner. I första sektionen finns oanvända patroner, nästa sektion är
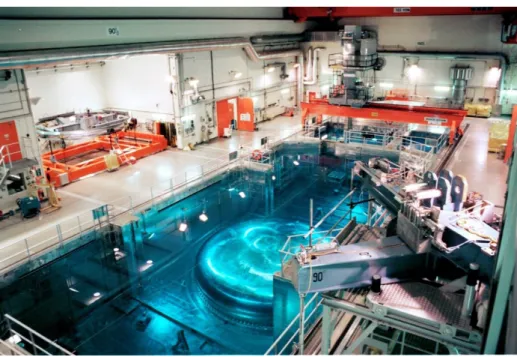
reaktordelen och i den sista sektionen hamnar de använda patronerna. När man byter ut patronerna räcker det inte med att flytta de gamla och stoppa ner den nya. Många patroner måste placeras om utifrån härdmätningar för att få de mest aktiva patronerna på rätt plats. Figur 3 visar en bild på reaktorhallen i Oskarshamn. Cirkeln i mitten av poolen är reaktorlocket och längre bort syns bryggan som rör sig över poolen samt några mindre poolsektioner.
Figur 3 Reaktorhall Oskarshamn
3.1
PLC
En PLC (Programmable Logic Controller) är en slags dator som används inom automation. En PLC är en lättanvänd styrning som till exempel styr trafikljus, rulltrappor och förpackningsmaskiner. En PLC är en dator med
kommunikationsenheter som kan programmeras utefter vilka uppgifter den får via signaler. (ABB 2018). Trafikljus är ett exempel hur man kan styra enheter. Ett trafikljus som visar grönt för bilar och rött för gående ändras genom att t.ex. den gående trycker på en knapp vid övergångsstället, de signalerna säger åt PLC att ändra ljuset från grönt till gult och sedan till rött för bilarna medan de gående får grönt ljus.
3.2
PL säkerhetsklassning
PL (Performace level) bestämmer riskreduktionen som behövs för en
säkerhetsfunktion. För varje säkerhetsrelaterad del i ett kontrollsystem behöver PL beräknas, PL är baserad på fyra olika parametrar, kategori (struktur), DC (diagnostic coverage), MTTFD (Mean time to dangerous failure) och CCF (Common cause failure). Komponenter som är säkerhetsklassade med en viss klassning har oftast en extra funktion som kan förhindra eller förminska skadan om ett fel skulle uppstå.
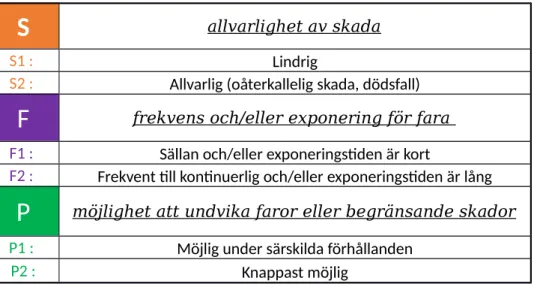
Standarden PL ger en metod för detta ändamål och använder sig av en riskgraf för att utvärdera svårighetsgraden av skada, se Figur 4. Riskgrafen utgår från tre parametrar, S, F och P. S (Severity of injuri) står för allvarlighet av skada, F
(Frequency and/or exposure to hazard) står för frekvens och/eller exponering för fara och P (Possibility of avoiding hazard or limiting harm) står för möjlighet att undvika faror eller skador. S, F och P delar var och en upp sig i ytterligare två parametrar som har ett mindre allvarligt utfall och ett allvarligt utfall, se Tabell 1.
Tabell 1 PL, Risktabell
S
allvarlighet av skadaS1 : Lindrig
S2 : Allvarlig (oåterkallelig skada, dödsfall)
F
frekvens och/eller exponering för fara F1 : Sällan och/eller exponeringstiden är kortF2 : Frekvent till kontinuerlig och/eller exponeringstiden är lång
P
möjlighet att undvika faror eller begränsande skadorP1 : Möjlig under särskilda förhållanden
P2 : Knappast möjlig
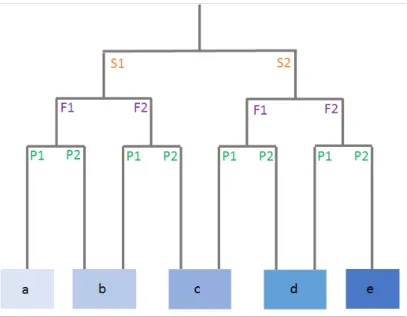
Riskgrafen i Figur 4 visar säkerhetsklassningarna a till e, genom att följa och bedöma ett system utifrån risktabellen hamnar det på någon av klassningarna. Om t.ex. skadan som kan ske är allvarlig (S2), exponeringstiden är lång (F2) och faror och skador knappast är möjliga (P2) hamnar systemet i en PLe klassning.
Figur 4 Riskgraf
3.2.1
Kategori
Kategorin anger säkerhetsbeteendet som krävs av kontrollsystemet utifall ett fel skulle inträffa. Det finns olika typer av kategorier, kategori B och kategori B1, B2, B3 och B4 där B4 är den högsta kategorin. Kategori B säger att systemet måste följa gällande standarder och använda grundläggande principer för den specifika applikationen för att klara de förväntade påfrestningarna, påverkan av det bearbetade materialet och andra relevanta påverkningar.
De flesta komponenter som kommer användas kommer att ha kategori B4 vilket innebär att utöver kategori B ska:
Ett enstaka fel ska inte leda till förlust av säkerhetsfunktionen. Felet ska detekteras vid eller före nästa efterfrågan på
säkerhetsfunktionen, men att om detektionen inte är möjlig, ska det oupptäckta felet inte leda till förlust av säkerhetsfunktionen.
3.2.2
DC, MTTFD och CCF
DC är ett mått på effektiviteten av diagnostiken, vilken kan bestämmas som förhållandet mellan felprocenten för antalet icke detekterade farliga fel och totala antalet farliga fel. DC kan existera för hela eller delar av ett
säkerhetsrelaterat system. Förhållandet har ett intervall på låg, medium och hög där låg har en felprocent på 60-90 %, medium på 90-98 % och Hög på 98-100 %. Medium klarar säkerhetskravet för PLd och hög klarar kravet för PLe.
Den genomsnittliga tiden för farligt fel MTTFD är ett medelvärde under driftens gång innan en komponent misslyckas på ett sätt som ger upphov till en farlig situation. Värdet är baserat på data för frekvensen av misslyckanden inom en
viss tidsperiod och kan beräknas utifrån felfrekvensen. MTTFD gör det möjligt att förutse olika block och elements beteende under påverkan av de krafter som vanligtvis uppträder vid användning. För att förenkla har MTTFD delats in i intervallet låg, medium och hög, där låg har tidsspannet 3 till 10 år, medium har tidsspannet 10-30 år och hög har tidsspannet 30 till 100 år. För att MTTFD ska klara kravet för Ple/PLd krävs det att den ligger inom tidsspannet 10-100 år. CCF beskriver fel i ett kontrollsystem som kan anknytas till en generell orsak t.ex. kontaminering, elektromagnetisk störning eller tryck. Sådana fel är endast relevanta för kategori 2, 3 eller 4. CCF ger en poängbaserad metod för
bedömning av åtgärder där CCF antar ett värde från 1 till 100 och för att kravet PLe/PLd ska uppfyllas krävs det minst 65 poäng.
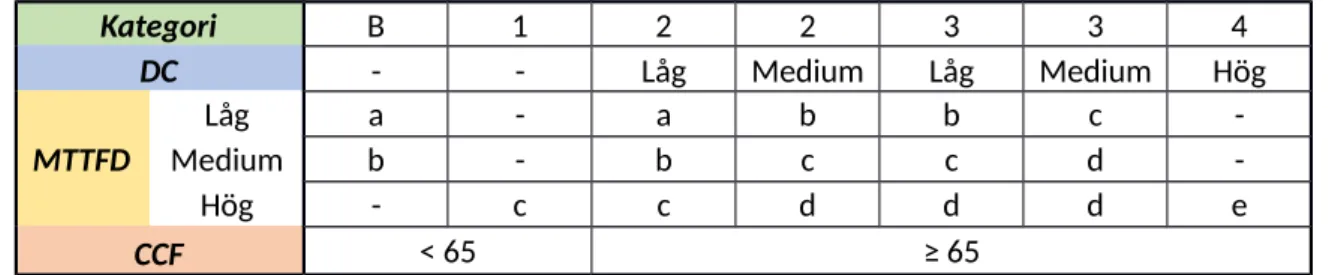
Nedan i Tabell 2 visas hur kategori, DC, MTTFD och CCF tillsammans bestämmer vilken säkerhetsklassning funktionen får.
Tabell 2 Säkerhetsklassning parametrar
Kategori B 1 2 2 3 3 4 DC - - Låg Medium Låg Medium Hög MTTFD Låg a - a b b c -Medium b - b c c d -Hög - c c d d d e CCF < 65 ≥ 65
3.3
Hårdvarukomponenter
Komponenterna som jämförs och används för att skapa ett säkrare system för bränslehanteringsmaskinen listas nedan och kommer sedan förklaras.
Komponenterna är: Kontaktor/relä Frekvensomriktare Pulsgivare Resolver Gränslägesbrytare Omvandlare Lastcell
3.3.1
Kontaktor/Relä
En kontaktor och ett relä är i princip samma sak, det som separerar dem är belastningen som de är avsedda för att hantera. Kontaktorn används för laster som har höga spänningar, höga strömmar eller båda. Kontaktor är en mekanisk
enhet som används för att slå på eller av olika apparater genom en magnet som sluter kretsen genom kontaktorn när den får ström (Differencebetween 2012).
3.3.2
Frekvensomriktare
Frekvensomriktare används för dels för att styra motorer genom att ändra nätets frekvens samt spänning till variabla storheter. AC-spänning (alternating current) går upp och ner i formen av en sinusvåg, när spänningen är positiv flödar strömmen åt ett håll, när spänningen är negativ flödet strömmen åt andra hållet. Frekvensomriktaren omvandlar AC-spänningen till DC-spänning. Med hjälp av en likriktare kan strömmen bara flöda när spänningen är positiv. En andra likriktare gör att strömmen kan passera enbart när spänningen är negativ (ATO 2018). Frekvensomriktarens främsta fördelar är: (Danfoss 2018).
Energibesparing
Att förbättra processreglering
Att minska mekanisk belastning vid motorstyrning Att optimera driften
3.3.3
Pulsgivare
Pulsgivare är en komponent som skickar ut en signal som kan användas för att bestämma position, hastighet och direktion. En pulsgivare vet inte sin exakta position den vet bara att positionen har ändrats. Den vanligaste typen av pulsgivare är den optiska, den har en roterande disk med ett mönster liknande ett cykeldäck. En lampa är monterad under disken som blir blockerad av diskens mönster vilket leder till en pulssignal, ljus = on, inget ljus = off. Denna signal skickas till PLC’n (Encoder 2016).
3.3.4
Resolver
En resolver fungerar på ett liknande sätt som en transformator. En resolver består av en rotor och en kopparlindad stator. En typisk resolver har tre
lindningar, en primär lindning och två sekundära lindningar. En ström induceras i rotorn och överförs sedan till de två statorlindningarna som ger ut en sinusvåg och en cosinusvåg. Genom att mäta vinkeln mellan rotorn och statorn kan
resolvern komma ihåg position (Roboteq 2017). Figur 5 ResolverFigur 5 visar rotorlindningen (blå) och statorlindningarna cosinus och sinus som sitter 90 grader ifrån varandra i statorn (rosa och grön).
Figur 5 Resolver (Learnchannel, 2018)
3.3.5
Gränslägesbrytare
En gränslägesbrytare används till kontroll av utrustning eller processer.
Gränslägesbrytaren fungerar genom att en ”arm” fysiskt känner av ett material och när armen har flyttat sig till en viss gräns upphör rörelsen.
Gränslägesbrytaren ser då till att det rörande materialet inte rör sig förbi en viss punkt. Figur 6 visar en gränslägesbrytare och armen sitter på ovansidan (Omron 2018).
Figur 6 Exempel på gränslägesbrytare (Grainger, 2018)
3.3.6
Omvandlare
En omvandlare är en elektrisk komponent som gör om energi från en form till en annan. Omvandlare finns vanligtvis i mikrofoner, högtalare, termometrar,
rörelse- och trycksensorer och antenner (Whatis 2007).
3.3.7
Lastcell
En lastcell är uppbyggd så att den kan operera på ett förutsägbart och ett repeterbart sätt när en kraft appliceras. Kraften omvandlas till volt genom motståndsförändringar. Motståndsförändringen anger storleken på
deformationen och därigenom belastningen som applicerats (Pcb 2018).
4
AKTUELL STUDIE
Arbetet börjar med att skapa konceptuella scheman för funktionerna som
kommer att implementeras i SISTEMA. När schemat är färdigt kommer samtliga komponenter för funktionerna att väljas och läggas in i SISTEMA för verifiering att säkerhetskraven uppfylls.
4.1
Funktioner
De två funktionerna som utreds djupare är rörelsefunktionen samt
hastighetsfunktionen, rörelse- och hastighetsfunktionen kommer att tas hela vägen till att godkännas av SISTEMA medan kraftfunktionen endast kommer att ritas upp i ett schema. Exempel på andra men viktiga funktioner som inte
kommer att göras i detta arbete är t.ex. att kranens sänk- och lyftrörelse är kontrollerad och att gripklon greppar tag och låser fast patronerna innan någon form att rörelse är tillåten.
4.1.1
Rörelse i riktning mot kanterna av poolen
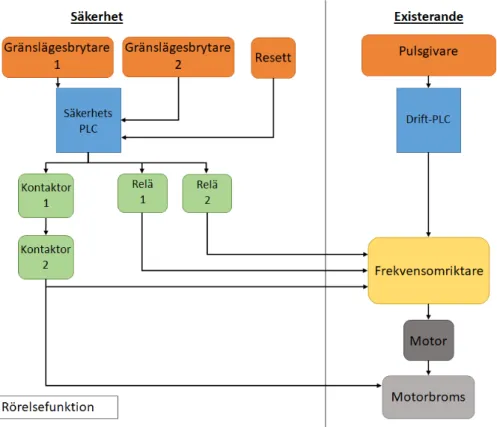
Den första funktionen som kommer realiseras är rörelsefunktionen, funktionen bestämmer hur nära kanterna som bryggan får röra sig. Det konceptuella
schemat för funktionen är inlagt som Figur 7Error: Reference source not found. Den nuvarande drift-PLC’n har ingen säkerhetsfunktion men en pulsgivare håller alltid kontroll på vart i poolen bryggan befinner sig och ser till att den aldrig kommer för nära kanterna. Pulsgivaren i driftsystemet kommunicerar med en frekvensomriktare som korrigerar hastigheten efter behov.
På vardera sidan av poolen kommer det sitta en gränslägesbrytare som indikerar när minsta avståndet från kanten är nådd. Om gränslägesbrytarna skulle aktiveras skickas en signal till säkerhets-PLC’n. Från PLC’n skickas två signaler ut, en signal till motorns frekvensomriktare och en signal till en
mekanisk broms. Signalen till frekvensomriktaren går till två kontaktorer i serie (Det används två kontaktorer i serie ifall en inte skulle fungera så har den en till
som reserv) som öppnar upp kretsen och gör motorn spänningslös vilket
resulterar till att motorn börjar sakta ner. Signalen till den mekaniska bromsen hanteras på samma sätt som signalen till frekvensomriktaren, dvs. två
kontaktorer i serie. Motorn bromsar då mekaniskt tills den står helt still. För att få bryggan att röra på sig igen måste en säkerhetsbrytare tryckas in manuellt för att göra en resett. När en reset är gjord får självklart inte motorn röra sig i samma riktning som den gjorde tidigare, den ska bara kunna gå i den motsatta riktningen. Detta säkerställs genom att en aktiveringssignal går antingen via relä 1 eller relä 2 beroende på vilken av gränslägesbrytarna som aktiveras.
Figur 7 Konceptuellt schema, rörelsefunktion
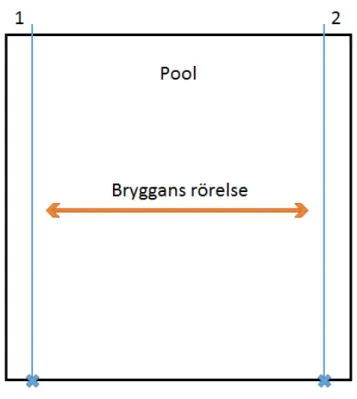
I Figur 8 beskrivs bryggans rörelse över poolen, bryggan sträcker sig hela vägen över poolen och kan röra sig i pilarnas riktning. Gränslägesbrytarna sitter på den ”nedre” sidan av poolen och visas i bilden som blåa kryss. Mellan kanterna och de blåa linjerna är all rörelse för bryggan förbjuden.
Figur 8 Rörelsefunktion, pool
4.1.2
Hastighet mot kanterna av poolen
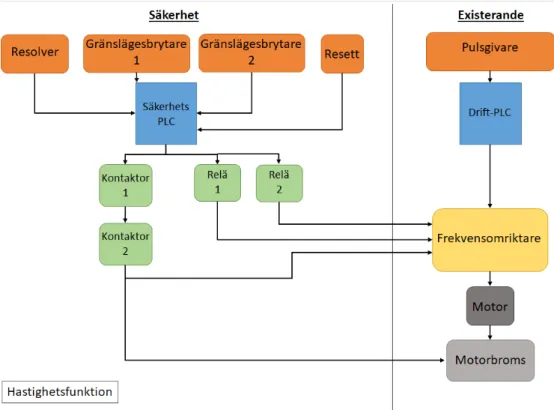
Nästa funktion är hastighetsfunktionen som är en utbyggnad av
rörelsefunktionen. För att bryggan inte ska komma med för hög hastighet mot kanterna används en resolver för att kontrollera bryggans hastighet samt bryggans position vid de röda linjerna. Om bryggans hastighet är för hög vid dessa lägen stoppas motorn på samma sätt som beskrivits i avsnitt 4.1.1. Se Figur 9 samt Figur 10.
Figur 9 Konceptuellt schema, hastighetsfunktion
I Figur 10 syns två röda linjer, vid dessa ska bryggan understiga en viss
hastighet. Mellan de röda och de blå strecken är hastigheten begränsad till en given hastighet. Hastigheten innanför de röda linjerna får vara i princip hur hög som helst.
Figur 10 Hastighetsfunktion, pool
4.1.3
Över- och underviktsskydd på lyftkranen
Kraftfunktionen ska förhindra att den maximala samt den minimala kraften inte överskrids respektive underskrids. När kraften uppnår 110 % av den maximala vikten eller går under den minimala vikten kommer ett larm skickas till
operatören.
En lastcell känner av en obalans och skickar vidare en resistanssignal till en omvandlare. Omvandlaren gör om resistansen till en ström som PLC’n kan avläsa. Med en ström på 4-20 mA vet PLC’n om hur mycket vikt som hanteras beroende av storleken på strömmen. Lastcellen som används måste klara upp till 4 ton för att kunna klara av kraften den utsätts för utan att riskera att gå sönder. Omvandlaren skickar även en signal till en isolationsförstärkare som i sin tur skickar signalen till den existerande drift-PLC’n. Isolationsförstärkaren separerar den existerande PLC’n från säkerhets-PLC’n genom galvaniskt isolering. På samma sätt som rörelse- och hastighetsfunktionen används
Figur 11 Konceptuellt schema, kraftfunktion
4.2
SISTEMA
SISTEMA beräknar vilken säkerhetsklass det angivna systemet får beroende på vilka komponenter som väljs. Företagen som säljer dessa komponenter lägger upp egna ”bibliotek” där köparen kan välja produkter efter behov. För detta examensarbete kommer produkter från olika företag att väljas och sättas samman till ett system. Varje komponent kan antingen läggas in manuellt om komponentinformationen saknas, eller så finns komponenten redan inlagd med respektive datavärde och blir därefter tilldelade en säkerhetsklass. När
systemet är färdigt och alla komponenter som ska användas är valda beräknar SISTEMA den totala säkerhetsklassningen för hela systemet.
För att underlätta för Westinghouse kan ett eget bibliotek skapas där man samlar de komponenter som används för det aktuella projektet, på grund av tidsbrist är detta inget som kommer att göras.
Om den högsta säkerhetsklassningen PLe krävs för en given funktion så kommer en komponent som endast har klassning PLd att dra ner systemets totala
säkerhetsklassning till PLd. Om kravet för funktionens säkerhet inte uppfylls byter man ut komponenter mot högre klassade komponenter tills funktionen blir godkänd.
För vissa komponenter ska antal ”aktiveringar” per år fyllas i, med det värdet samt produktens egna data om hur många aktiveringar den ska klara av kan en ungefärlig livslängd räknas ut. I detta arbete kommer alla komponenter sättas
till 1 aktivering per år. Detta är dock överdrivet då drift-PLC’n redan har satta positioner som bryggan inte får passera vilket medför att de nya komponenterna kanske aldrig kommer till användning. De nya komponenterna kanske bara aktiveras var femte år eller mer sällan, men SISTEMA tillåter endast heltal.
5
RESULTAT
I resultaten kommer de komponenter som användes i var funktion att redovisas samt en bild från programmet SISTEMA som visar om funktionen är godkänd eller icke godkänd för sin tilltänkta säkerhetsklassning. Funktionens
säkerhetsklassning redovisas i tabellerna nedan.
5.1
Konceptuella scheman
Figur 12
Figur 13 Resultat schema hastighet
Figur 14 Resultat schema kraft
5.2
Rörelsefunktion
Första testet i SISTEMA för rörelsefunktionen uppnår inte säkerhetskraven. Komponenterna som används är en PLC, två reläer, två kontaktorer, två gränslägesbrytare och en säkerhetsbrytare. Funktionen väljs till kategori B2, MTTFD blir 20 år, DC hamnar på 80 % och CCF sätts till 65 poäng.
Med en kategori B2, MTTFD är medium, DC är låg och CCF har 65 poäng kommer funktionen inte vara tillräckligt säker för att uppnå varken PLd eller PLe. Med dessa komponenter uppnår funktionen säkerhetsklassningen PLb.
Tabell 3 Resultat, rörelsefunktion misslyckad
Kategori B 1 2 2 3 3 4 DC - - Låg Medium Låg Medium Hög MTTFD Låg a - a b b c -Medium b - b c c d -Hög - c c d d d e CCF < 65 ≥ 65
Figur 15 är en bild tagen från SISTEMA där vi kan se hur funktionen är uppbyggd med respektive komponenter. SISTEMA indikerar med röda kryss bredvid de komponenter som inte uppnår de tilltänkta kraven, då dessa komponenter inte uppnår kraven kommer funktionen att bli icke godkänd av SISTEMA.
Figur 15 Rörelsefunktion, misslyckad
Vid det andra testet av rörelsefunktionen kommer de komponenter som inte uppfyllde kraven att bytas ut mot mer passande komponenter. Med mer säkra
komponenter som uppfyller kraven kan funktionen väljas till kategori B4, MTTFD blir 30 år, DC hamnar på 99 % och CCF sätts till 65 poäng.
Då rörelsefunktionen är i kategori B4, MTTFD är hög, DC är hög och CCF har 65 poäng kommer funktionen att få en PLe klassning.
Tabell 4 Resultat, rörelsefunktion
Kategori B 1 2 2 3 3 4 DC - - Låg Medium Låg Medium Hög MTTFD Låg a - a b b c -Medium b - b c c d -Hög - c c d d d e CCF < 65 ≥ 65
SISTEMA indikerar detta försök endast med gröna bockar, detta betyder att alla funktionens komponenter uppnår säkerhetskraven som ställts, Se Figur 16.
Figur 16 Rörelsefunktion, komponentuppbyggnad
5.3
Hastighetsfunktion
För hastighetsfunktionen används en säkerhetsresolver, en PLC, två reläer, två kontaktorer, två gränslägesbrytare och en säkerhetsbrytare. Funktionen väljs till en kategori B3, MTTFD blir 30 år, DC hamnar på 98 % och CCF sätts till 65 poäng.
Då hastighetsfunktionen är i kategori B3, MTTFD är hög, DC är medium och CCF har 65 poäng kommer denna funktion att få en PLd klassning.
Tabell 5 Resultat, hastighetsfunktion
Kategori B 1 2 2 3 3 4 DC - - Låg Medium Låg Medium Hög MTTFD Låg a - a b b c -Medium b - b c c d -Hög - c c d d d e CCF < 65 ≥ 65
SISTEMA indikerar med endast gröna bockar, funktionen uppnår säkerhetskraven.
Figur 17 Hastighetsfunktion, komponentuppbyggnad
6
DISKUSSION
På grund av förseningar från leverantören av PLC’n kan vi inte programmera in funktionerna eller testa om de fungerar. Efter programmeringen kommer
hanteringsmaskinen att röra sig på samma sätt som innan fast kompletterad med nya komponenter, programmeringen kommer att vara mycket enkel för att undvika möjligheter till felkällor.
För rörelsefunktionens första försök gav SISTEMA ett icke godkänt resultat, detta på grund av att de komponenter som valdes inte uppnår kraven. Den valda PLC’n stödjer endast kategori 2, detta i sig gör att funktionen högst kan uppnå säkerhetsklassningen PLd. Om DC och MTTFD hade legat i medium-intervallet respektive hög-intervallet hade funktionen uppnått kravet PLd. Som det nu blev med dessa komponenter hamnade DC och MTTFD inte tillräckligt högt i
intervallen vilket leder till att funktionen fick klassningen PLb. För att lösa detta byter vi ut de komponenter som minskar funktionens säkerhetsklassning till komponenter som är gjorda för att användas i ett säkerhetssystem. Med ändring av PLC-typ, reläer och säkerhetsbrytare till de säkerhetsklassade varianterna kommer funktionen att nå upp till den högsta säkerhetsklassningen PLe. Denna funktion skulle även vara godkänd med PLd-klassning från Westinghouse
perspektiv.
Anledningen till att vi väljer en säkerhetskontaktor över en vanlig kontaktor är att på en säkerhetskontaktor finns det inte möjlighet att manuellt aktivera den. På kontaktorn sitter ett extra block som inte går att trycka in. Denna
designfunktion undviker möjligheten att personalen skapar ett osäkert tillstånd på grund av oväntad start. Säkerhetskontaktorn har ett nödstopp med
kontrollerad uppstart som en inbyggd funktion vilket gör denna komponent till en kategori B4.
Om vi inte använder ett säkerhetsrelä/säkerhetskontaktor finns ingen isolation mellan existerande PLC och den nya tillagda. Kontaktorn skapar ett fysiskt avstånd mellan kontaktelementen som förhindrar strömmen att passera förutom när det behövs.
Till hastighetsfunktionen väljer vi en resolver istället för en pulsgivare därför att pulsgivare endast mäter hastigheten men vet inte var objektet befinner sig, därför krävs även gränslägesbrytare för att tala om positionen för pulsgivaren. För att få samma funktion att fungera med en pulsgivare krävs alltså fler komponenter till skillnad från att ha en resolver som gör samma jobb. Anledningen till att funktionen inte uppnår PLe är för att resolvern endast stödjer kategori B3, detta medför att den högsta säkerhetsklassningen
funktionen kan uppnå är PLd. Kategori B3 medför även att DC inte når upp till 99 % eller högre och hamnar därför inom intervallet medium. Funktionen skulle kunna uppnå säkerhetsklassningen PLe genom att välja en resolver som stödjer kategori 4 men av de företagen som hade resolvers så var denna den med högst klassning.
Vi kommer inte fortsätta kraftfunktionen längre än till det konceptuella schemat i detta arbete, detta är därför att några av komponenterna som används i
funktionen inte finns i något företags färdiga bibliotek. För att lösa detta hade vi manuellt fått ta reda på information och data om komponenterna och lägga in
det i SISTEMA, mängden arbete för att få in dessa blir för mycket för att hinna göras under detta examensarbete.
Miljöpåverkan av detta arbete är att vi kommer lägga till ett flertal produkter till ett redan fungerande system men för att Westinghouse ska kunna uppnå de nya kraven som ställts är detta ett måste. Vid drift blir påverkan så gott som noll då de tillagda komponenterna i bästa fall inte ens behöver användas.
7
SLUTSATSER
För att realisera maskinens funktioner är det bra att få en förståelse för hur funktionen kommer att fungera, ett konceptuellt schema gjorde det väldigt enkelt. För att hela systemet ska bli så säkert som möjligt kommer valen av komponenter vara viktiga då beroende på hur de är uppbyggda och fungerar så får vi ut en säkerhetsklassning. Komponenter väljs pågrund av deras särskillda uppbyggnad och extra funktioner såsom övervakning eller fysiska skydd från manuell aktivering. Dessa komponenter har säkerhetsklassningen PLd eller PLe där PLd är den lägsta klassningen som klarar kraven och kan ge Westinghouse ett säkert system.
Om kraven på systemet inte uppfylls kommer det inte att realiseras innan något har ändrats eller förbättrats.
8
FÖRSLAG TILL FORTSATT ARBETE
I fortsatt arbete kommer alla resterande funktioner att ritas upp i först konceptuella scheman och sedan införas i SISTEMA för godkännande. När PLC’n anländer kan sedan dessa funktioner programmeras in och därefter provas så vi vet att de fungerar som de ska utan problem.
Då de skapade funktionerna inte bara är tänkta för ett system utan de är tänkta till att implementeras inom alla driftsatta anläggningar kan skillnader såsom antalet givare variera. Därför kan funktionerna variera lite och måste därför tittas igenom för varje anläggning.
För att förenkla inköp och eventuella ändringar på funktionerna kan Westinghouse skapa ett eget bibliotek i SISTEMA. Där kan vi samla alla
att hitta för alla som håller på med arbetet. Då alla komponenter inte finns inlagda i SISTEMA kommer de som saknas att kunna läggas in manuellt genom att leta upp data för var och en.
REFERENSER
ABB (2018). "Styrsystem i det mindre formatet." from http://new.abb.com/se/om-abb/teknik/sa-funkar-det/plc.
ATO (2018). "AC drives basics." from http://www.acdrive.org/ac-drives-basics.html
Danfoss (2018). "Vad är en frekvensomriktare?". from
http://drives.danfoss.se/danfoss-drives/what-is-an-ac-drive/#/
Differencebetween (2012). "Difference between contactor and relay." from
http://www.differencebetween.net/technology/industrial/difference-between-contactor-and-relay/
Ekonomifakta (2017). "Elproduktion." from
https://www.ekonomifakta.se/Fakta/Energi/Energibalans-i-
Sverige/Elproduktion/?gclid=EAIaIQobChMIr-PX4_yQ2gIVXNwZCh2JYAk0EAAYAiAAEgIsefD_BwE
Encoder (2016). "What is an encoder?". from http://encoder.com/blog/company-news/what-is-an-encoder/
Energiföretagen (2017). "Elproduktion." from
https://www.energiforetagen.se/sa-fungerar-det/el/produktion/
Illvet (2012). "Hur fungerar en urancentrifug?". from
http://illvet.se/fysik/periodiska-systemet/uran-hur-fungerar-en-urancentrifug. Omron (2018). "Limit switches." from
https://www.ia.omron.com/support/guide/30/overview.html. Pcb (2018). "Load cells." from
http://www.pcb.com/Contentstore/mktgcontent/WhitePapers/WPL_24_Load_Cells .pdf
Roboteq (2017). "How resolvers work." from
https://www.roboteq.com/index.php/component/easyblog/entry/how-resolvers-work?Itemid=1208.
ROK (1995). Reaktorteknisk orienteringskurs ABB Atom. Strålsäkerhetsmyndigheten (2017). "Kärnbränsle." from
https://www.stralsakerhetsmyndigheten.se/omraden/karnkraft/sa-fungerar-ett-karnkraftverk/karnbransle/.
Strålsäkerhetsmyndigheten (2017). "Så fungerar ett kärnkraftverk." from
https://www.stralsakerhetsmyndigheten.se/omraden/karnkraft/sa-fungerar-ett-karnkraftverk/.
Vattenfall (2014). "Så fungerar kärnkraft." from
https://corporate.vattenfall.se/om-energi/el-och-varmeproduktion/karnkraft/sa-fungerar-karnkraft/
Vattenfall (2015). "Så påverkar våra kärnkraftverk miljön." from
https://corporate.vattenfall.se/om-oss/var-verksamhet/var-elproduktion/karnkraft/miljopaverkan/
Westinghouse (2018). "Om Westinghouse Electric Sweden." from
http://www.westinghousenuclear.com/sweden/Om-Oss. Whatis (2007). "Transducer." from
https://whatis.techtarget.com/definition/transducer.
Analys, 2016. "Skadad bränslestav vid Ringhals". http://www.analys.se/skadad-branslestav-vid-ringhals/
Learnchannel, 2018. "Resolver". http://learnchannel-tv.com/drives/servomotor/resolver/
Grainger, 2018. "Lever general purpose limit switch".
https://www.grainger.com/product/DAYTON-Plunger-12T909
Box 883, 721 23 Västerås Tfn: 021-10 13 00 Box 325, 631 05 Eskilstuna Tfn: 016-15 36 00