Urvalsmetod för funktionskontroll av vägmarkeringar Sven-Olof Lundkvist Väg- och transport-forskningsinstitutet
VTI meddelande 833 - 1998
Urvalsmetod för
funk-tionskontroll av
väg-markeringar
Sven-Olof Lundkvist
Väg- och
Utgivare Pukaann VTI meddelande 833
db
Utgivningsår 1998 Projektnummer30170Väg- och
transport-farskningsinstitutet
I
ProjektnamnUtveckling av metod för funktionskontroll av vägmarkeringar Författare Sven-Olof Lundkvist Uppdragsgivare Vägverket Titel
Urvalsmetod för funktionskontroll av vägmarkerin gar
Referat
Denna studie har syftat till att ta fram en objektiv metod för val av mätobjekt vid funktionskontroll av
väg-markeringar.
Rapporten beskriver hur ett objekt som ska funktionstestas kan indelas i mindre delobj ekt och mätplatser.
Vidare beskrivs hur man slumpmässigt kan välja mätplatser och från mätningar på dessa, objektivt avgöra om testet har godkänt eller underkänt vägmarkeringarnas funktion.
Språk
Svenska ISSN
PubHsher
Swedish National Road and
'Transport Research Institute
PubHcaüon
VTI meddelande 833
PubHshed
1998 Project code30170
Project
Development of a method for testing of road markings
Author
Sven-Olof Lundkvist
Sponsor
Swedish National Road Administration
Title
A selection method for use in testing the function of road markings
Abstract (background, aims, methods, result)
This study is aimed at producing an objective method for selecting mesuring objects in testing the function of
road markings
The report describes how an object to be tested can be divided into smaller units and measuring sites. A description is also given of a method for random selection of measuring sites and for using the measurements obtained to determine whether the test has approved or rejected the function of the road' markings.
ISSN
Förord
Detta VTI Meddelande redovisar ett samarbetsprojekt
mellan VTI, LG Road Tech, Vejdirektoratet (Danmark)
och Frederiksberg Amt (Danmark). Projektet är initie-rat och bekostat av Vägverket/VÄG och Vej direktoinitie-ratet, där kontaktpersoner har varit Inger Friborg och Rolf Magnusson i Sverige och Josephine Schøller i Danmark. Ett speciellt tack till Per-Ola Mattsson/VVÄuh, som valde ut intressanta mätobj ekt! De statistiska tankegångarnas snirkliga irrvägar har rätats ut av Mats Wiklund, VTI. Tack för det!
Första delen av notatet innehåller ett konkret förslag
till en metod för funktionskontroll av vägmarkeringar
med handhållen mätutrustning. Förslaget är baserat på de erfarenheter som gjorts vid två mätserier:
VTI MEDDELANDE 833
Hösten 1996 bekostade Vägverket i Sverige, Vejdirek-toratet i Danmark samt Frederiksborg Amt i Danmark ett inledande försök med val av mätplatser vid funktions-test. I detta försök koncentrerade man sig på längsgå-ende markeringar. Mätningarna gjordes vid detta tillfälle av Bent Rasmussen, DELTA Lys & Optik, Ib Lauridsen,
Frederiksborg Amt, samt Göran Nilsson, LG Road Tech, Lars-Erik Svensson, LG Road Tech, Uno Ytterbom, VTI samt S-O Lundkvist, VTI.
Hösten 1997 bekostade Vägverket ytterligare mät-ningar, där även tvärgående markeringar skulle stude-ras. Dessa mätningar gjordes av LG Road Tech och VTI. Gunilla Sjöberg har redigerat detta meddelande.
Innehå"
Sammanfattning ... 9
Summary ... .. 11
1 Inledning13 2 Bakgrund och syfte ... 14
3 Funktionstest - allmänt ... .. 15
4 Definitioner ... 16
4.1 Schematisk indelning av ett objekt vägmarkeringar ... .. 16
4.2 Objekt ... .. 16
4.3 Delobjekt ... .. 16
4.4 Mätplats ... 17
4.5 Utvalda mätplatser ... .. 17
4.6 Mätpunkt ... .. 17
5 Mätplatser som ska kontrolleras vid funktionskontroll av retroreflexion och luminanskoefflcient ... .. 18
5.1 Beteckningar ... .. 18
5.2 Beräkning av antalet mätplatser i ett delobjekt, N... .. 18
5.3 Numrering av mätplatserna ... .. 18
5.4 Beräkning av antalet utvalda mätplatser i varje delobj ekt, n ... .. 20
5.5 Beräkning av kontrollcykeln, m ... .. 20
5.6 Beräkning av den första mätplatsen som ska kontrolleras,f ... .. 20
5.7 Exempel på beräkningar ... .. 20
6 Utvalda mätplatser vid funktionskontroll av friktion ... .. 21
7 Tillåtet antalet underkända utvalda mätplatser ... .. 22
8 Antalet mätpunkter och deras position i mätplatsen ... .. 23
8.1 Längsgående markeringar ... .. 23
8.1.1 Intermittent kantlinje (höger och vänster) ... 23
8.1.2 Heldragen kantlinje (höger och vänster) ... .. 23
8. 1 .3 Intermittent mittlinje ... .. 23 8. 1 .4 Heldragen mittlinje ... .. 23 8.2 Tvärgående markeringar ... .. 25 8.2.1 Väjningslinje ... .. 25 8.2.2 Stopplinje ... .. 25 8.2.3 Övergångsställe ... 25 8.2.4 Cykelöverfart ... .. 25 8.3 Övriga markeringar ... 25 8.3. 1 Körfältspilar ... 25 8.3.2 Symbol ... .. 25 8.3 .3 Spärrfält, skaffering ... .. 25 8.3.4 Spärrfält, fylld spets ... .. 25
9 Den utvalda mätplatsens funktionsvärde ... .. 26
10 Sammanfattning av de olika delmomenten vid funktionskontroll ... .. 27
11 Referenser ... .. 28 Bilaga 1 Tabeller samt exempel på funktionskontroll
Urvalsmetod för funktionskontroll av vägmarkeringar
av Sven-OlofLundkvist
Statens väg- och transportforskningsinstitut (VTI)
581 95 LINKÖPING
Sammanfattning
Om man vill kontrollera vägmarkeringars funktion en-ligt föreslagen EN-norm kan man omöjen-ligt mäta på samt-liga markeringar. Man måste istället från populationen välja ett sampel som man kontrollerar. Detta sampel ska väljas så att man från mätningarna på samplet kan ge-neralisera resultatet att gälla hela populationen.
Det är således viktigt att inte endast de fysikaliska
mätmetoderna är relevanta; även metoden att välja mät-punkter för funktionskontroll måste vara oantastlig. Från
mätningarna på samplet ska man kunna dra korrekt
slut-sats om godkännande eller underkännande av
popula-tionen med en statistisk metod som innebär att man har full kontroll på den risk man har att fatta felaktigt be-slut.
Empiriskt har man visat att data från mätningar av vägmarkeringars funktion inte alltid är normalfördelade.
VTI MEDDELANDE 833
Detta innebär att det kan vara direkt olämpligt att an-vända en statistisk variabelmetod. I stället föreslås att mätvärdena indelas så att de blir binomialfördelade och att en attributmetod appliceras på data. En sådan metod beskrivs i rapporten.
Rapporten beskriver hur ett objekt (tex. en väg-sträcka) som ska funktionstestas kan indelas i delobjekt, mätplatser, mätplatser utvalda för kontroll samt mät-punkter. Vidare ges ett förslag till hur man kan beräkna antalet mätplatser som ska funktionstestas och vad detta antal innebär för testets statistiska säkerhet.
För att underlätta användandet av metoden har vissa användbara parametrar tabellerats i en bilaga. Rappor-ten innehåller dessutom ett exempel på en fullständig funktionskontroll enligt den metod som föreslås.
A selection method for use in testing the function of road markings
by Sven-Olof Lundkvist
Swedish Road and Transport Research Institute (VTI) SE-581 95 Linköping, Sweden
Summary
When testing the functiOn of road markings according to the proposed EN standard, it is of course impossible to test every marking. Instead, a sample has to be selec-ted n such a way that the measurements provide a result that can be generalised to the whole population.
It is therefore important that not only the physical test methods are valid: the method of selecting mea-suring sites for function testing must also be faultless. It must be possible to use the measurements from the sample to draw correct conclusions for approval or rejection of the population using a statistical method ensuing full control over the risk of making an incorrect decision.
Empirically, it has been shown that data from mea-surements of road marking performance do not always
follow a normal distribution. This means that it may be
VTI MEDDELANDE 833
directly inappropriate to use a method based on statistical variables. Instead, it is proposed that the measuring values be divided up to follow a binomial distribution and that an attribute method be applied to the data. Such a method is described in the report.
The report describes how an object (eg. a stretch of road) for function testing can be divided into units, measuring sites, measuring sites selected for testing, and
measuring points. The report includes a proposal for a
method for calculating the number of measuring sites to be tested and the consequences for the statistical reliability of the test.
To facilitate use ofthe method, certain suitable para-meters have been listed in an appendix. The report also includes an example of a complete function inspection according to the proposed method.
1 Inledning
Detta meddelande redovisar ett samarbetsprojekt
mel-lan VTI, LG Road Tech, Vejdirektoratet (Danmark) och
Frederiksborg Amt (Danmark). Projektet är initierat och
bekostat av Vägverket/VÄG och Vejdirektoratet, där
kontaktpersoner har varit Inger Friborg och Rolf Magnusson i Sverige och Josephine Schøller i Danmark. Ett speciellt tack till Per-Ola Mattsson/VVÄuh, som valde ut intressanta mätobjekt!
Första delen av meddelandet innehåller ett konkret förslag till en metod för funktionskontroll av vägmarke-ringar med handhållen, mätutrustning. Förslaget är
ba-serat på de erfarenheter som gjorts vid två mättillfällen.
Hösten 1996 bekostade Vägverket i Sverige, Vej-direktoratet i Danmark samt Frederiksborg Amt i Dan-mark ett inledande försök med val av mätplatser vid funk-tionstest. I detta försök koncentrerade man sig på längs-gående markeringar. Mätningarna gjordes vid detta
till-fälle av Bent Rasmussen, DELTA Lys & Optik, Ib Lauridsen, Frederiksborg Amt, Göran Nilsson, LG Road Tech, Lars-Erik Svensson, LG Road Tech, Uno Ytter-bom, VTI samt S-O Lundkvist, VTI.
VTI MEDDELANDE 833
Hösten 1997 bekostade Vägverket ytterligare mätningar, där även tvärgående markeringar skulle studeras. Dessa mätningar gjordes av LG Road Tech och VTI. Vid dessa mätningar gjordes även en liten studie av den mobila mätutrustningen Ecodyn, tillhörande Cleanosol
Interna-tional, Kristianstad.
Förslaget är skrivet som ett underlag för svensk me-todbeskrivning, men kan lätt anpassas till vad som
gäl-ler för övriga nordiska länder.
Förutom metodbeskrivningen innehåller meddelan-det en bilaga.
I denna återfinns tabeller för bestämning av antalet mätplatser som ska kontrolleras, n och kontrollcykeln, m. Vidare återfinns här en slumptalstabell för val av den första mätplatsen som ska kontrolleras, f. l ytterligare en tabell redovisas de statistiska parametrarna AQL och LQ som funktion av sampelstorleken, H, och tillåtet an-tal underkända mätplatser, c. Slutligen finns i bilagan ett komplett exempel på enfunktionskontroll.
2 Bakgrund och syfte
Syftet med denna studie har varit att beskriva en urvals-metod som kan användas vid funktionskontroll av väg-markeringar. Metoden ska ange, inte endast mätning-arnas omfattning, utan även mätplatsernas fysiska läge i testobjektet och mätpunkternas position för olika ty-per av vägmarkeringar.
Vid funktionskontroll av vägmarkeringar använder man vanligen portabla mätinstrument. Dessa placeras på själva markeringen och funktionsvärdet avläses.
14
Problemet är att man med portabla instrument oftast inte kan mäta på samtliga markeringar man Önskar testa, utan man tvingas mäta på ett urval - en sampel. Denna rap-port beskriver hur man kan definiera detta sampel - dess storlek och också dess fysiska läge inom testobjektet.
Mycket av innehållet i den föreslagna urvalsmetoden är hämtat från ett tidigare PM: Nordisk Vägledning för Funktionskontroll av Vägmarkering.
3 Funktionstest - allmänt
Ett funktionstest kan ha följ ande syften:
0 Entreprenörens egenkontroll. Entreprenören vill kon-trollera ett utfört arbete.
0 Kontroll av utfört arbete. Väghållaren vill kontrollera ett av entreprenören utfört arbete.
0 Gorantikontroll. Väghållaren vill i slutet av garanti-perioden kontrollera huruvida markeringarna uppfyller givna funktionskrav.
0 Funktionsbestämning. Väghållaren vill veta vägmar-keringarnas funktion, oftast med syfte att avgöra om underhållsåtgärd är nödvändig.
Med vägmarkeringens funktion avses fortsättningsvis
endera retroretlexionen (R), luminanskoefñcienten (Qd)
eller friktionen (u). Retroretlexionen beskriver
marke-ringens synbarhet nattetid, medan luminanskoefficienten
beskriver dess synbarhet dagtid.
Funktionstestet kan ske enligt två principer:
Kontroll av samtliga markeringar. Från varje
mätpunkt i varje mätplats tas ett mätvärde, oavsett om någon markering finns kvar eller ej. Saknas markeringen helt, kommer mätpunkten ha vägbeläggningens mät-värde. Ett eventuellt godkännande kommer att gälla hela delobjektet, inklusive eventuella mätplatser som ej är intakta.
VTI MEDDELANDE 833
Kontroll av endast intakta markeringar. För varje
matplats som är vald för kontroll bedöms (subjektivt) om markeringarna är intakta eller ej. Mätplatsens
mar-kering (-ar) är intakta om det bedöms att 80 % eller mer
av den_ yta som ska vara vit finns kvar. Om mätplatsen ej är intakt väljs nästa mätplats för kontroll. Observera att ett eventuellt godkännande endast gäller de mätplatser som är intakta. Övriga anses vara underkända efter okulär besiktning och ska åtgärdas.
Nackdelen med den sistnämnda strategin för val av mätplatser är att man inte helt kommer bort från sub-jektivitet. Man tvingas bedöma hur stor andel av den
markerade ytan som är intakt, vilket är svårt och kan
introducera ett fel i funktionstestet.
Vilken av metoderna som ska användas bestäms av upphandlingen.
Vad gäller mätningarnas omfattning eller testets am-bitionsnivå, så bör producent och väghållare komma
överens om detta. En riktlinje kan dock vara att nya
markeringar testas på enlåg ambitionsnivå, medan garan-tikontroll och kontroll av ännu äldre markeringar sker på en högre nivå. Endast undantagsvis görs en mer om-fattande kontroll.
4 Definitioner
4.1 Schematisk indelning av ett objekt väg-markeringar
Figur 1 visar principen för hur ett objekt med vägmärke-ringar indelas i delobj ekt, mätplatser, utvalda mätplatser och mätpunkter.
4.2 Objekt
Det vägmarkeringsmaterial som ska testas benämns objekt. Objektet kan vara alla vägmarkeringar i ett geo-grafiskt område eller på en väg. Objektet kan således bestå av flera olika typer av vägmarkeringar mellan två givna punkter, t.ex. kantlinjer, övergångsställen,
spärr-falt, etc.
4.3 Delobjekt
Objektet kan indelas i delobjekt. Ett delobjekt består ofta av endast en vägmarkeringstyp som alltid är lagd vid ett och samma tillfälle av samma entreprenör och med sam-ma sam-material. Vid en funktionskontroll enligt ovan, kan
emellertid delobjektet bestå av markeringar lagda vid
skilda tillfällen av olika entreprenörer. Delobj ekten kan indelas i längsgående, tvärgåena'e och övriga vägmar-keringar enligt följ ande:
Längsgående markeringar höger kantlinje (i vägens riktning)
Väg-vänster kantlinje (i vägens riktning)
mittlinje (inkl. körfältslinje och begränsningslinje i spärr-fält).
Körfältslinje och begränsningslinje i spärrfält tillhör delobj ektet mittlinje och behandlas som en sådan. Tva'rgående markeringar stopplinje väjningslinje övergångsställe cykelöverfart Övriga markeringar körfältspil
symbol (inkl. text) spärrfält, skaffering spärrfalt, fylld spets
Spärrfåltet är således indelat i två delobjekt, skaffering och fylld yta. Dess begränsningslinje tillhör dock del-objektet mittlinje.
Sammanlagt finns således ll typer av delobjekt. Ett objekt kan bestå av endast ett delobjekt. I det fallet är delobjekt och objekt identiska.
markeringar OBJEKT
Vänster Höger . . . Övergångs- Väjnings- DELOBJEKT
kantlinje kantlinje M'ttl'me ställe linje
.J J
i :'.".'J
E23 EB %
J :'j'ji :'j'jj
:'jfj
MÄTPLATSER
2 UTVALDA
MÄTPLATSER
Ö MÄTPUNKTER
Figur 1 Schematisk indelning av ett objekt vagmarkeringar i a'elabjekt, matplatser, utvalda mätplatser och mät-punkter.
4.4 Mätplats
Delobjektet indelas i mätplatser. Hur denna indelning görs beror på typen av delobjekt enligt följande:
Delobjekt vänster och höger kantlz'nje samt mittlinje Varje mätplats har våglängden 12 meter. Om delobj ektets (vägsträckans) längd uttryckt i meter divideras med 12
och kvoten trunkeras, dvs. avrundas nedåt till närmaste
heltal, anger detta tal antalet mätplatser i delobj ektet. Delobjekt stopplinje, vájningslinie, cykelöverfart och Övergångsställe
En stopplinje, en väjningslinje, en cykelöverfart eller ett
övergångsställe är en mätplats. Dock gäller förcykel-överfart och övergångsställe att om den/det är delat av t.ex. en refug, utgör båda (eller flera) delarna
tillsam-mans en mätplats.
VTI MEDDELANDE 833
Delobjekt körfältspz'l, symbol, spärrfält/skafering och spärrfält/jñ/lld pil
Varje körfältspil, symbol, skaffering i spärrfalt eller 5/le pil i spärrfält är en mätplats.
4.5 Utvalda mätplatser
Bland de mätplatser som ingår i delobj ektet väljs ett
an-tal ut för funktionskontroll. Dessa benämns
fortsättnings-vis urvalda mätplatser. 4.6 Mätpunkt
Med mätpunkt avses ett ställe på enmätplats där ett mätvärde avläses.
5 Mätplatser som ska kontrolleras vid funktionskontroll
av retroreflexion och luminanskoefficient
5.1 Beteckningar
I det fortsatta används följande beteckningar:
g Godkännandegräns. Den kvalitetsnivå som kunden och producenten är överens om är rimlig att kräva.
L Delobj ektets våglängd (vid längsgående mar-keringar)
N antalet mätplatser i delobj ektet
n antalet utvalda mätplatser (som ska
kontrol-leras)
f den första utvalda mätplatsen som ska kon-trolleras
m kontrollcykeln. Efter mätplatsf, kontrolleras var mze mätplats
en konstant som anger testets omfattning
c antalet underkända mätplatser som tillåts för godkännande av delobj ektet.
5.2 Beräkning av antalet mätplatser i ett delobjekt, N
Före kontrollen måste antalet mätplatser i de i objektet ingående delobjekten, N, beräknas. För längsgående markeringar beräknas N som:
där delobj ektets våglängd, L, uttrycks i meter. N trunke-ras, dvs. avrundas till närmaste lägre heltal. Varje mät-plats är således 12 meter lång.
18
För tvärgåena'e och Övriga markeringar gäller att man inventerar antalet mätplatser, N, i varje delobj ekt enligt vad som sägs i 3.4. Antalet mätplatser avgörs således medelst okulär besiktning.
5.3 Numrering av mätplatserna
Längsgåena'e markeringar numreras i vägens riktning, definierad enligt VDB. De första 12 metrarna i delob-jektet är således mätplats 1, nästa 12 meter mätplats 2, osv. Av praktiska skäl kan man tillåta sig att låta denna numrering omfatta i förekommande fall samtliga tre del-objekt: höger kantlinj e, vänster kantlinje och mittlinje. På detta vis kommer mätplatserna för dessa tre delobjekt att ligga ungefär mitt för varandra. I fallet intermittenta linjer kommer mätplatsen för vänster kantlinje och mitt-linje att börja vid nästa delmitt-linje i vägens riktning. Man kan således få en förskjutning mellan de tre delobj ektens mätplatser beroende om linjerna ligger mitt för varan-dra eller ej. Ett exempel visas i figur 2. På samma sätt kan man på motorväg tillåta sig att mätplatserna för höger kantlinje, körfältslinjen och vänster kantlinje (i en kör-riktning) ligger i höjd med varandra.
Tvargående och Övriga markeringar numreras i Vä-gens riktning. Om objektet innehåller en korsning är regeln att man primärt numrerar i vägens riktning, se-kundärt från höger till vänster. Om objektet är endast en korsning, benämner man den väg som går närmast syd-nord som huvudväg, vilken får ange vägens rikt-ning. Figur 3 visar ett exempel på numrering av tre del-objekt i en korsning.
I .. | .. ..
J _ matpla_ts n -1 _ __i _ matrfts n _ _J _ matplat_s n + 1 _ _J VÄNSTER
I I | I KANTLINJE I I I I I | I __ I MITTLINJE
L
_
_
_
L
_
_
_
L
_
_
__
L_ HOGER
I 12 m I | I KANTLINJE F I---Vägens riktning
Figur 2 Mätplatsenfor längsgående, intermittenta markeringar är 12 meter lång. Mätning sker på de med x mar-kerade markeringarna, förutsatt att mätplatsen är utvaldför funktionskontroll.
(3'0 '
uu
øø|
1L|
nnnn
43
SD
9:[:JE]
EEEO
<3
E>
Vägens riktningFigur 3 Om objektet innehåller en korsning, numreras mätplatserna i delobjekten i korsningen primärt i vägens riktning, sekundärtfrån höger till Vänster. Figuren visar en korsning med delobjekten körfältspilar (8 mätplatser), Övergångsställen (4 mätplatser) och väjningslinjer (2 mätplatser).
5.4 Beräkning av antalet utvalda mätplatser i varje delobjekt, n
Antalet utvalda mätplatser, dvs. antalet mätplatser som
ska kontrolleras i ett delobjekt, n, bestäms som
n=k JN
där n avrundas matematiskt korrekt till närmaste heltal. Ovanstående ekvation gäller samtliga typer av vägmar-keringar. Emellertid ska minsta antalet utvalda
mät-platser alltid vara n=3 för längsgående markeringar och n=2 för tvärgående och Övriga markeringar.
Beträffande k rekommenderas följ ande:
Litet test k=0,2 vid entreprenörens egenkont-roll och kontegenkont-roll av utfört arbete Stort test k=0,5 vid garantikontroll och
funk-tionsbestämning
Omfattande test k=.l,0 iundantagsfall, t.ex. vid tvist Hur n varierar med N och [c framgår av tabellerna 1-6 i bilaga 1.
5.5 Beräkning av kontrollcykeln, m Kontrollcykeln, m, beräknas som
N 171:_-n
m trunkeras, dvs. avrundas till närmaste lägre heltal. Man mäter på var mze utvald mätplats.
Hur m varierar med N och H framgår av tabellerna 1-6 i bilaga 1.
5.6 Beräkning av den första mätplatsen som ska kontrolleras, f
Den första mätplatsen som ska kontrolleras, f,
beräk-nas som
x ' (m - 1) = _ + 1
f 100
där x är ett slumptal som erhålls ur tabell 7 i bilaga 1. f
20
avrundas matematiskt korrekt.
Vid funktionskontroll av retroreflexion eller
luminans-koefflcient ska således följ ande mätplatser kontrolleras:
f, f+m, f+2m, ..., f+(n-1)m. Dessa benämns utvalda
mätplatser.
5.7 Exempel på beräkningar
Antag att ett delobjekt består av mittlinje på en 3,5 km lång sträcka. Man vill göra en garantikontroll av retro-reflexionen och väljer därför k=0,5. Dagens datum är
1:ajuli.
L 3500
N=ñ=7=29l
Totala antalet mätplatser i delobj ektet, N, är
n=k-W=0,5.«/291=17
trunkerat. Av dessa ska n mätplatser kontrolleras:
korrekt avrundat till närmaste heltal. Antalet utvalda mät-platser, n, är således 17.
Kontrollen ska göras på var mze mätplats i objektet:
_x'(m-l)
14-(17-1)
f' 100
7
100
+1
- 3trunkerat. Ur tabell 7, bilaga 1, erhålls x=14, vilket ger
den första mätplatsen som ska kontrolleras:
f,f+m,f+2m, ...,f+(n-1)m = 3, 20, 37, ..., 275.
korrekt avrundat till närmaste heltal.
Således ska kontrollen ske på mätplatserna: ff+m,f+2m, f+(n-1)m = 3, 20, 37, 275.
Observera att 12 och m finns tabellerade i tabell
1-7, bilaga 1 för olika värden på N och k.
6 Utvalda mätplatser vid funktionskontroll av friktion
Vid funktionskontroll 'av friktion gäller vad som sagts under 5. Dock mäter man endast på var 5 :e utvald mät-plats enligt 5.5, med början på den första mätmät-platsen enligt 5.6.
VTI MEDDELANDE 833
Detta innebär att kontrollen görs på mätplatserna: f, f+5-m, f+5-2m f+5-(n-I)m.
7 Tillåtet antalet underkända utvalda mätplatser
Detta innebär att om decimalen är 1-4 avrundas c nedåt,
annars uppåt till närmaste heltal. g anges här i andelen (ej antalet) utvalda mätplatser under kravet.
Antalet utvalda mätplatser som tillåts ha ett underkänt funktionsvärde, (3, kommer att bero på
godkännande-gräns, g, och antalet utvalda mätplatser, 72, enligt: czn'g
där 0 avrundas matematiskt korrekt till närmaste heltal.
8 Antalet mätpunkter och deras position i mätplatsen
Varje utvald mätplats består av en eller flera mätpunkter, från vilka enskilda mätvärden ska avläsas. Mätplatsen indelas i mätpunkter enligt följ ande:
8.1 Längsgående markeringar
8.1.1 Intermittent kantlinje (höger och vänster) Retroreflexionen: De tre första markeringarna i vägens riktning har vardera 2 mätpunkter. Varje mätpunkt är belägen cirka 1/3 av linjens längd från vardera ände. Sammanlagt mäter man således i 6 mätpunkter på varje mätplats. Se figur 4.
Luminanskoefficienten: De tre första markeringa-rna i vägens riktning har vardera l mätpunkt. Varje mät-punkt är belägen ungefär i mitten av linjen. Sammanlagt mäter man således i 3 mätpunkter på varje mätplats. Se figur 4.
Friktionen: Den enda mätpunkten är belägen i
mit-ten på den första markeringen i vägens riktning. Se
fi-gur 4.
8.1.2 Heldragen kantlinje (höger och vänster) Retroreflexionen: Avståndet från början på mätplatsen till mätpunkterna är i vägens riktning: 0 m, 1 m, 5 m, 6 m, 10 m och 11 m. Se figur 4.
Luminanskoefficienten: Avståndet från början på
mätplatsen till mätpunkterna är i vägens riktning: 0 m, 5
m och 10 m. Se figur 4.
Friktionen: Den enda mätpunkten är belägen 0 m
från mätplatsens början. Se figur 4.
VT| MEDDELANDE 833
8.1.3 Intermittent mittlinje
Retroreflexionen: Den första markeringen i vägens
riktning har 4 mätpunkter. Mätpunkterna är belägna på ungefärliga avstånden 1/5 och 2/5 av markeringens längd från vardera ände. Sammanlagt mäter man således i 4 mätpunkter på varje mätplats. Se figur 4.
Luminanskoefficienten: Den första markeringen i vägens riktning har 2 mätpunkter. Dessa är belägna på avståndet ca 1/5 från vardera ände av markeringen. Sam-manlagt mäter man således i 2 mätpunkter på varje mät-plats. Se figur 4.
Friktionen: Den enda mätpunkten är belägen på avstånden cirka 1/5 ñån markeringens början. Se figur 4. 8.1.4 Heldragen mittlinje
Observera att vid dubbel spärrlinje mäts alltid endast på den linje som avser vägens riktning, dvs. den som är till höger sett i vägens riktning.
Retroreflexionen: Avståndet från början av mät-platsen till mätpunkterna är i vägens riktning: 0 m, 1 m, 5 m och 6 m. Se figur 4.
Luminanskoefficienten: Avståndet från början av
mätplatsen till mätpunkterna är i vägens riktning: 0 m och 5 m. Se figur 4.
Friktionen: Den enda mätpunkten är belägen 0 m från mätplatsens början. Se figur 4.
R/Qd/u R R R/Qd I
Qd/u
RlR
rz'R
od
i i
ii
R/Qd/u
Vägens riktningi
-_ -< _ 0 D . < -: u -< -_ : u VÄNSTER KANTLINJE MITTLINJE HÖGER KANTLINJE VÄNSTER KANTLINJE MITTLINJE HÖGER ._ x < _ x -< _ : u -< -: u Vägens riktning KANTLINJE meterFigur 4 Mätpunkternas position vid mätning på intermittenta längsgående linjer (Överst) och heldragna
längsgå-ende linjer (nederst). R, Qd och ;i avser retroreflexienen, luminanskoejfzeienten respektive friktionen.
8.2 Tvärgående markeringar 8.2.1 Väjningslinje
Retroreflexionen: Mätpunkterna är belägna mitt på varje enskild hajtand. Antalet mätpunkter på varje utvald mätplats är således lika med antalet hajtänder.
Luminanskoefficienten: Mätpunkterna är belägna mitt på varje enskild hajtand.Antalet mätpunkter på varje utvald mätplats är således lika med antalet hajtänder.
Friktionen: Den enda mätpunkten är belägen mitt på den första hajtanden på mätplatsen.
8.2.2 Stopplinje
Retroreflexionen: Första mätpunkten är belägen 0,5 m från mätplatsens början. Därefter är avståndet mel-lan varje mätpunkt l m. Antalet mätpunkter på varje utvald mätplats är således linjens längd (meter) minus
l.
Luminanskoefficienten: Första mätpunkten är be-lägen 0,5 m från mätplatsens början. Därefter är avstån-det mellan varje mätpunkt l m. Antalet mätpunkter på varje utvald mätplats är således linjens längd (meter) minus l.
Friktionen: Den enda mätpunkten är belägen 0,5 m från mätplatsens början.
8.2.3 Övergångsställe
Retroreflexionen: En mätpunkt är belägen mitt på varje vitt fält i övergångsstället. Antalet mätpunkter på varje utvald mätplats är således lika med antalet vita fält i övergångsstället.
Luminanskoefficienten: En mätpunkt är belägen mitt på varje vitt fält i övergångsstället. Antalet mätpunkter på varje utvald mätplats är således lika med antalet vita fält i Övergångsstället.
Friktionen: En mätpunkt är belägen mitt på varje
vitt fälti övergångsstället. Antalet mätpunkter på varje
utvald mätplats är således lika med antalet vita fält i Övergångsstället.
8.2.4 Cykelöverfart
Retroreflexionen: En mätpunkt är belägen mitt på varje vitt fält i cykelöverfarten. Antalet mätpunkter på
varje utvald mätplats är således lika med antalet vita fält i cykelöverfarten.
Luminanskoefficienten: En mätpunkt är belägen mitt på varje vitt fält i cykelöverfarten. Antalet mätpunkter
på varje utvald mätplats är således lika med antalet vita
fält i cykelöverfarten.
VTl MEDDELANDE 833
Friktionen: Den enda mätpunkten är belägen mitt på cykelöverfartens första vita fält.
8.3 Övriga markeringar
8.3.1 Körfältspilar
Retroreflexionen: En mätpunkt är belägen mitt på pil-skaftet och en mitt i pilhuvudet. Finns fler pilhuvuden är en mätpunkt belägen mitt på det gemensamma pil-skaftet och en mitt i varje enskilt pilhuvud. Antalet mät-punkter på varje utvald mätplats är således antalet pil-huvuden plus 1.
Luminanskoefficienten: En mätpunkt är belägen mitt på pilskaftet och en mitt i pilhuvudet. Finns fler pilhuvuden är en mätpunkt belägen mitt på det gemen-samma pilskaftet och en mitt i varje enskilt pilhuvud. Antalet mätpunkter på varje utvald mätplats är således antalet pilhuvuden plus 1.
Friktionen: Den enda mätpunkten är belägen mitt i pilhuvudet. Finns fler pilhuvuden är mätpunkten belä-gen mitt i det första pilhuvudet.
8.3.2 Symbol
Funktionskontrolleras endast med okulär besiktning. 8.3.3 Spärrfält, skaffering
Retroreflexionen: Tre mätpunkter finns på varje mät-plats: Den första skafferingen, en ungefär i mitten av skafferingarna och den sista skafferingen.
Luminanskoefficienten: Tre mätpunkter finns på
varje mätplats: Den första skafferingen, en ungefär i mitten av skafferingarna och den sista skafferingen.
Friktionen: Ingen kontroll.
8.3.4 Spärrfält, fylld spets
Retroreflexionen: Den första mätpunkten är belägen
cirka 0,5 m från spetsens början. Därefter en mätpunkt
var 526 meter. Antalet mätpunkter på varje utvald mät-plats är således approximativt den fyllda spetsens längd dividerat med 5.
Luminanskoefficienten: Den första mätpunkten är
belägen cirka 0,5 m från spetsens början. Därefter en mätpunkt var 5:e meter. Antalet mätpunkter på varje
utvald mätplats är således approximativt den fyllda spet-sens längd dividerat med 5.
Friktionen: Ingen kontroll.
9 Den utvalda mätplatsens funktionsvärde
Funktionsvärdet för en mätplats är lika med medelvär- medelvärdet av de sex mätpunkternas mätvärden. Det det av mätvärdena i mätpunkterna. För tex. en kantlinje, är detta medelvärde som ligger till grund för god- eller är funktionen med avseende på retroreflexion lika med underkännande.
10 Sammanfattning av de olika delmomenten vid
funk-tionskontroll
En komplett funktionskontroll består av följande
del-moment:
VTl
Indela objektet i delobjekt enligt 4.3.
Beräkna, N, antalet mätplatser för delobjekt med längsgående markeringar genom att mäta upp sträckans längd och förfara enligt 5.2. Inventera antalet mätplatser för tvärgående och övriga mar-keringar enligt 5.2.
Numrera mätplatserna enligt 5.3.
Beräkna antalet utvalda mätplatser för varje del-objekt, n, samt kontrollcykeln, m enligt 5.4 och 5.5 samt eventuellt 6. Finns även i tabellerna l-6, bilaga 1.
Beräkna numret på den första mätplatsen som ska kontrolleras,f enligt 5.6.
MEDDELANDE 833
10.
Beräkna högsta tillåtna antalet underkända utvalda mätplatser, 0, enligt 7.
Mät de funktionsparametrar som ska kontrolle-ras i mätpunkter enligt 8.
Beräkna funktionsvärdet för varje mätplats enligt 9. Observera att mätningarna kan avbrytas och
delobjektet underkännas när man har funnit c+l
underkända mätplatser.
Ett delobj ekt godkänns om högst 0 mätplatser har funktionsvärde under kravet.
Ett objekt godkänns om samtliga delobjekt är god-kända.
Ett exempel på funktionskontroll enligt punkterna 1-10 återfinns i bilaga 1.
11 Referenser
Bergman B, Klefsjö, K. Statistisk kvalitetsstyrning. Väg 94. Allmän teknisk beskrivning för vägkon-Studentlitteratur. 1986. struktioner. Del 9. Vägmarkeringar. Vägverket.
Nilssøn, G: Nordisk Vägledning för Funktionskont- 1994.
roll av Vägmarkering. PM 1997-03-31. LG Road Tech.
Bilaga 1 Sid 1 (19)
Tabeller samt exempel på funktionskontroll.
1 Tabeller för antal mätplatser som ska kontrolleras, 11, samt för
kontrollcykeln, m, för givna värden på N och k.
Värdena på H och m är beräknade från ekvationerna i avsnitten 5.4 respektive 5.5
för värden på N i intervallet 1 till 500 och för k=0,2, k=0,5 och k=l,0. Observera
att för värden på N upp till 100 ska tabell 1 användas för längsgående markeringar och tabell 2 för tvärgående och Övriga markeringar.
För värden på N Över 500 används ekvationerna i 5.4 och 5.5.
Fl = k ° N/N
där n avrundas matematiskt korrekt till närmaste heltal.
Kontrollcykeln, m, beräknas som
M
2
m trunkeras, dvs. avrundas till närmaste lägre heltal. Var mze mätplats är således en utvald mätplats.
Bilaga 1 Sid 2 (19)
Tabell] Antalet utvalda matplatser, n, samt kontrollcykeln, m, för antal
mät-platser, N, mellan 1 och 100 samt den valda faktarn, k=0,2, 0,5 eller
1,0. Avser längsgående markeringar.
H 9 Il ;N Q \ O \ O \ O O O O O O O \ I\ I \ I O \ O \ O \ U I U I U I A -h -bwwwN N N -* -d -d -* -Aä N 9 o xo xo o o o o o o uxl xl o o o xm m m A b b wwwN N N H H H H h . å M N N Q II O N N 9 U 1 S -A -d -A -d -A -A -A -\ Å- Ä-I ÄU J U J U J U J N -A o xo o o uo m A t h -Z y-L . Ä p--A I LJ ] p-n i-A p-A U _ Å M -_A kl] _ | U. ) p-a LI ] -Å 4 ; p-d O N _ | 21 1 y-x O N C R h -d O \ In n-d \ 1 _ A C h -A 0 0 _-A \ ) h a xo -A \ ] N O N_4 p -Å \ 1 N N p-A 0 0 N .b p-d 00 N KJ] _a 00 N O\ bd \O N \1 _ -4 \ O N OO H \0 N \0 -A xo D J 0 H 0 p-d O N CD D J -_a _ A 0 ha 0 -A G\ U J N p-A 0 -A 0 *p--a 0\ b ) DJ _ r-A .-4 b- p-a 0\ b. ) .1 ). H p-A H '-4 p-A ON D J LJ] i-A p-A p-a p-Å y-A \ 1 '0 ) O \ p d N N p-A \) U ) \] p-A N i-A N _Å \1 U. ) 0 0 )_Å N p-m N »_.a \1 b. ) K D _ UJ 5-4 U.) _A \I 4 ; O i-Å U.) _ n y-t W U . ) -a -a 0 0 0 0 : i .1 3 -A p-A b. ) 4 ; M _ A .p _4 .få _a 00 b -l O .( 3 M _a .lå ;_A .A _a 00 p-A 0 . h .h p-d .p h l . b i -l 0 0 ,_-A 0 4; th 'y-Å (11 H U1 p-a \0 p_- 0 .l å O \ p-A LI ] i -d LI ] p-a \ O y-a 0 . b \ ] p_ -L! ) _ A LJ ] ;. -A \0 p _ 0 . Ä O O y-a O \ p-a C h _ A K O _-\ O .5 G _-| ON y-a M -A \0 )_A C k n 1 2 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 23 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 . p b wwwwwwwwwwwwwwwwwwwwwwwwwm wwwwwwwwwwwm wwwwwwwwwh a 3 ; v \ 1 x) x) x] x) x) uum o o m m o o o o o m o wm m m m m m m m m b b b h h b b äwwwwwwm wwwwh a 3 w wwwwwwwwwwwwwwwwm wwwwwwwm wwwm wm wwwwwwm wwm wwwwwwwww3 än m m m m m m m m m wm m m m m m m m m m 4 : b ääh b b h b b h b h b b b äb b åb äb äb ååh -h ä. S ät _ A 00 N O G O O O O N G O O O O O M M M M M O M m m m m A A A A M ÄåA -b wwwb wwwN N N M M M M _ å O ©©©©©©©©©©©©©©©©©©©wO O O O O O O O O O O O O O øO O O O O O O O O O O O O O O O N N \ ) \ l \ l * 4 \ 1 0 0 \ 1 \ 1 \ 1 \ 1 üä U ] 0 _d 0 I -l N N O bd O VTI meddelande 833
Bilaga 1 Sid 3 (19)
Tabell 2 Antalet utvalda mätplatser, n, samt kontrollcykeln, m, för antal mat-platser, N, mellan 1 och 100 samt den valda faktorn, k:0,2, 0,5 eller
1,0. Avser tvärgående och övriga markeringar.
M Q II JN Q xo o o o o o xl uc xo xm m A -b -wwww_ a _ . _ § N M Q E xo xo o o o o uxl o xo xm m -b -b wwwwp -_ H ä U 1 N N Q 0,2 m k: n 2 25 2 26 2 26 2 27 2 27 2 28 2 28 2 29 2 29 2 30 2 30 2 31 2 31 2 32 2 32 2 33 2 33 2 34 2 34 2 35 2 35 2 36 2 36 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 i -A o o o o uo xm wa H 2 N N N N H H H H M H _ A -A -A W N H O G O O N G M -ÄD J N H -a 0 37 37 38 38 39 39 40 40 41 41 42 42 43 43 44 44 45 45 46 46 47 47 48 48 49 49 50 J ; Ä-b - Ä-b -ÄJ Ä-ÄJ ÄU J U J U J W U J U J U J U J U J U JN N N N N O O N O M -ÄW N H O C O O N O M ÄM N H O O O O N O M _ n -\ -t -A -t -a -A -H 0 4:. \o . p . p m wm wwwwwwwwwwwm wwwwwwwwwwwwwN N N N N N N N N N N N N N N N N N N H 3 ;va y-A p-A i -Å _ x k n 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 24 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 x) \ 1 o m o o m m wa o m m m o m m m m m m m m m m m A A A -h m b h b b wm wb wwwN N N h A H -t wwå O ©\ O \ O \ D \ O \ O \ O \ O \ O \ O \ D \ C \ O ©\ O \ O G O G O O O O O O O O O O O O O O O O O O O O O O O O O O O O O O O O O N N N N N N N O O Q N \ l \ l \ l å U 1 O b -L O b -d VTI meddelande 833
Bilaga 1 Sid 4 (19)
Tabell 3 Antalet utvalda mätplatser, n, samt kontrollcykeln, m, för antal
mat-platser, N, mellan 10] 0017 200 samt den valda faktorn, k:0,2, 0,5
eller 1,0. Avser längsgående markeringar.
k=0,2 k=0,5 k=1,0 k=0,2 k=0,5 k==1,0 N n m n m n m N n m n m n 777 101 3 33 5 20 10 10 151 3 50 6 25 12 12 102 3 34 5 20 10 10 152 3 50 6 25 12 12 103 3 34 5 20 10 10 153 3 51 6 25 12 12 104 3 34 5 20 10 10 154 3 51 6 25 12 12 105 3 35 5 21 10 10 155 3 51 6 25 12 12 106 3 35 5 21 10 10 156 3 52 6 26 12 12 107 3 35 5 21 10 10 157 3 52 6 26 13 12 108 3 36 5 21 10 10 158 3 52 6 26 13 12 109 3 36 5 21 10 10 159 3 53 6 26 13 12 110 3 36 5 22 10 11 160 3 53 6 26 13 12 111 3 37 5 22 11 10 161 3 53 6 26 13 12 112 3 37 5 22 11 10 162 3 54 6 27 13 12 113 3 37 5 22 11 10 163 3 54 6 27 13 12 114 3 38 5 22 11 10 164 3 54 6 27 13 12 115 3 38 5 23 11 10 165 3 55 6 27 13 12 116 3 38 5 23 11 10 166 3 55 6 27 13 12 117 3 39 5 23 11 10 167 3 55 6 27 13 12 118 3 39 5 23 11 10 168 3 56 6 28 13 12 119 3 39 5 23 11 10 169 3 56 7 24 13 13 120 3 40 5 24 11 10 170 3 56 7 24 13 13 121 3 40 6 20 11 11 171 3 57 7 24 13 13 122 3 40 6 20 11 11 172 3 57 7 24 13 13 123 3 41 6 20 11 11 173 3 57 7 24 13 13 124 3 41 6 20 11 11 174 3 58 7 24 13 13 125 3 41 6 20 11 11 175 3 58 7 25 13 13 126 3 42 6 21 11 11 176 3 58 7 25 13 13 127 3 42 6 21 11 11 177 3 59 7 25 13 13 128 3 42 6 21 11 11 178 3 59 7 25 13 13 129 3 43 6 21 11 11 179 3 59 7 25 13 13 130 3 43 6 21 11 11 180 3 60 7 25 13 13 131 3 43 6 21 11 11 181 3 60 7 25 13 13 132 3 44 6 22 11 12 182 3 60 7 26 13 14 133 3 44 6 22 12 11 183 3 61 7 26 14 13 134 3 44 6 22 12 11 184 3 61 7 26 14 13 135 3 45 6 22 12 11 185 3 61 7 26 14 13 136 3 45 6 22 12 11 186 3 62 7 26 14 13 137 3 45 6 22 12 11 187 3 62 7 26 14 13 138 3 46 6 23 12 11 188 3 62 7 26 14 13 139 3 46 6 23 12 11 189 3 63 7 27 14 13 140 3 46 6 23 12 11 190 3 63 7 27 14 13 141 3 47 6 23 12 11 191 3 63 7 27 14 13 142 3 47 6 23 12 11 192 3 64 7 27 14 13 143 3 47 6 23 12 11 193 3 64 7 27 14 13 144 3 48 6 24 12 12 194 3 64 7 27 14 13 145 3 48 6 24 12 12 195 3 65 7 27 14 13 146 3 48 6 24 12 12 196 3 65 7 28 14 14 147 3 49 6 24 12 12 197 3 65 7 28 14 14 148 3 49 6 24 12 12 198 3 66 7 28 14 14 149 3 49 6 24 12 12 199 3 66 7 28 14 14 150 3 50 6 25 12 12 200 3 66 7 28 14 14
VTI meddelande 833
Bilaga 1 Sid 5 (19)
Tabell 4 Antalet utvalda matplatser, n, samt kantrolleykeln, rn, för antal
mat-platser, N, mellan 10] och 200 samt den valda faktorn, k=0,2, 0,5
eller 1,0. Avser tvärgående och övriga markeringar.
k=0,2 k=0,5 k=],0 k=0,2 k=0,5 k=],0 N n rn n m n m N n m n m n m 101 2 50 5 20 10 10 151 2 75 6 25 12 12 102 2 51 5 20 10 10 152 2 76 6 25 12 12 103 2 51 5 20 10 10 153 2 76 6 25 12 12 104 2 52 5 20 10 10 154 2 77 6 25 12 12 105 2 52 5 21 10 10 155 2 77 6 25 12 12 106 2 53 5 21 10 10 156 2 78 6 26 12 12 107 2 53 5 21 10 10 157 3 52 6 26 13 12 108 2 54 5 21 10 10 158 3 52 6 26 13 12 109 2 54 5 21 10 10 159 3 53 6 26 13 12 110 2 55 5 22 10 11 160 3 53 6 26 13 12 111 2 55 5 22 11 10 161 3 53 6 26 13 12 112 2 56 5 22 11 10 162 3 54 6 27 13 12 113 2 56 5 22 11 10 163 3 54 6 27 13 12 114 2 57 5 22 11 10 164 3 54 6 27 13 12 115 2 57 5 23 11 10 165 3 55 6 27 13 12 116 2 58 5 23 11 10 166 3 55 6 27 13 12 117 2 58 5 23 11 10 167 3 55 6 27 13 12 118 2 59 5 23 11 10 168 3 56 6 28 13 12 119 2 59 5 23 11 10 169 3 56 7 24 13 13 120 2 60 5 24 11 10 170 3 56 7 24 13 13 121 2 60 6 20 11 11 171 3 57 7 24 13 13 122 2 61 6 20 11 11 172 3 57 7 24 13 13 123 2 61 6 20 11 11 173 3 57 7 24 13 13 124 2 62 6 20 11 11 174 3 58 7 24 13 13 125 2 62 6 20 11 11 175 3 58 7 25 13 13 126 2 63 6 21 11 11 176 3 58 7 25 13 13 127 2 63 6 21 11 11 177 3 59 7 25 13 13 128 2 64 6 21 11 11 178 3 59 7 25 13 13 129 2 64 6 21 11 11 179 3 59 7 25 13 13 130 2 65 6 21 11 11 180 3 60 7 25 13 13 131 2 65 6 21 11 11 181 3 60 7 25 13 13 132 2 66 6 22 11 12 182 3 60 7 26 13 14 133 2 66 6 22 12 11 183 3 61 7 26 14 13 134 2 67 6 22 12 11 184 3 61 7 26 14 13 135 2 67 6 22 12 11 185 3 61 7 26 14 13 136 2 68 6 22 12 11 186 3 62 7 26 14 13 137 2 68 6 22 12 11 187 3 62 7 26 14 13 138 2 69 6 23 12 11 188 3 62 7 26 14 13 139 2 69 6 23 12 11 189 3 63 7 27 14 13 140 2 70 6 23 12 11 190 3 63 7 27 14 13 141 2 70 6 23 12 11 191 3 63 7 27 14 13 142 2 71 6 23 12 11 192 3 64 7 27 14 13 143 2 71 6 23 12 11 193 3 64 7 27 14 13 144 2 72 6 24 12 12 194 3 64 7 27 14 13 145 2 72 6 24 12 12 195 3 65 7 27 14 13 146 2 73 6 24 12 12 196 3 65 7 28 14 14 147 2 73 6 24 12 12 197 3 65 7 28 14 14 148 2 74 6 24 12 12 198 3 66 7 28 14 14 149 2 74 6 24 12 12 199 3 66 7 28 14 14 150 2 75 6 25 12 12 200 3 66 7 28 14 14
VTI meddelande 833
Bilaga 1 Sid 6 (19)
Tabell 5 Antalet utvalda matplatser, n, samt kontrollcykeln, rn, for antal
mat-platser, N, mellan 201 och 300 samt den valda faktorn, k:0,2, 05
eller 1,0. Avser längsgående, tvärgâemle och övriga markeringar.
k=0,2 k=0,5 k=1,0 k=0,2 k=0,5 k=],0 N n m n m n m N n m n m n m 201 3 67 7 28 14 14 251 3 83 8 31 16 15 202 3 67 7 28 14 14 252 3 84 8 31 16 15 203 3 67 7 29 14 14 253 3 84 8 31 16 15 204 3 68 7 29 14 14 254 3 84 8 31 16 15 205 3 68 7 29 14 14 255 3 85 8 31 16 15 206 3 68 7 29 14 14 256 3 85 8 32 16 16 207 3 69 7 29 14 14 257 3 85 8 32 16 16 208 3 69 7 29 14 14 258 3 86 8 32 16 16 209 3 69 7 29 14 14 259 3 86 8 32 16 16 210 3 70 7 30 14 14 260 3 86 8 32 16 16 211 3 70 7 30 15 14 261 3 87 8 32 16 16 212 3 70 7 30 15 14 262 3 87 8 32 16 16 213 3 71 7 30 15 14 263 3 87 8 32 16 16 214 3 71 7 30 15 14 264 3 88 8 33 16 16 215 3 71 7 30 15 14 265 3 88 8 33 16 16 216 3 72 7 30 15 14 266 3 88 8 33 16 16 217 3 72 7 31 15 14 267 3 89 8 33 16 16 218 3 72 7 31 15 14 268 3 89 8 33 16 16 219 3 73 7 31 15 14 269 3 89 8 33 16 16 220 3 73 7 31 15 14 270 3 90 8 33 16 16 221 3 73 7 31 15 14 271 3 90 8 33 16 16 222 3 74 7 31 15 14 272 3 90 8 34 16 17 223 3 74 7 31 15 14 273 3 91 8 34 17 16 224 3 74 7 32 15 14 274 3 91 8 34 17 16 225 3 75 8 28 15 15 275 3 91 8 34 17 16 226 3 75 8 28 15 15 276 3 92 8 34 17 16 227 3 75 8 28 15 15 277 3 92 8 34 17 16 228 3 76 8 28 15 15 278 3 92 8 34 17 16 229 3 76 8 28 15 15 279 3 93 8 34 17 16 230 3 76 8 28 15 15 280 3 93 8 35 17 16 231 3 77 8 28 15 15 281 3 93 8 35 17 16 232 3 77 8 29 15 15 282 3 94 8 35 17 16 233 3 77 8 29 15 15 283 3 94 8 35 17 16 234 3 78 8 29 15 15 284 3 94 8 35 17 16 235 3 78 8 29 15 15 285 3 95 8 35 17 16 236 3 78 8 29 15 15 286 3 95 8 35 17 16 237 3 79 8 29 15 15 287 3 95 8 35 17 16 238 3 79 8 29 15 15 288 3 96 8 36 17 16 239 3 79 8 29 15 15 289 3 96 9 32 17 17 240 3 80 8 30 15 16 290 3 96 9 32 17 17 241 3 80 8 30 16 15 291 3 97 9 32 17 17 242 3 80 8 30 16 15 292 3 97 9 32 17 17 243 3 81 8 30 16 15 293 3 97 9 32 17 17 244 3 81 8 30 16 15 294 3 98 9 32 17 17 245 3 81 8 30 16 15 295 3 98 9 32 17 17 246 3 82 8 30 16 15 296 3 98 9 32 17 17 247 3 82 8 30 16 15 297 3 99 9 33 17 17 248 3 82 8 31 16 15 298 3 99 9 33 17 17 249 3 83 8 31 16 15 299 3 99 9 33 17 17 250 3 83 8 31 16 15 300 3 100 9 33 17 17
VTI meddelande 833
Bilaga 1 Sid 7 (19)
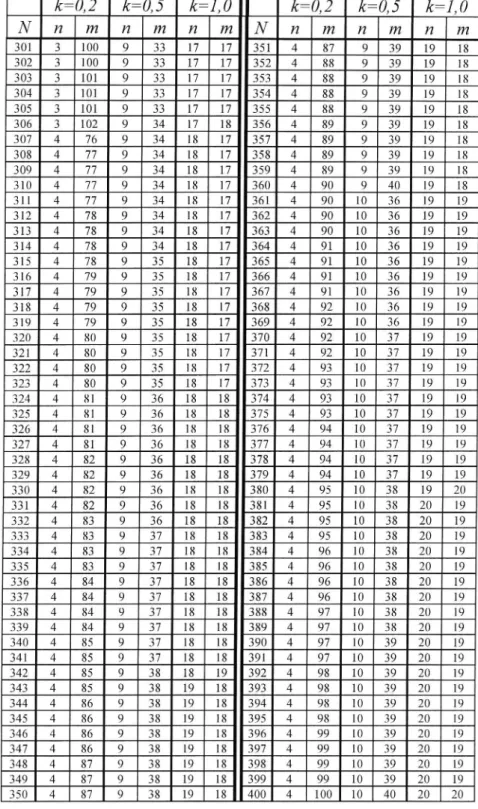
Tabell 6 Antalet utvalda mätplatser, n, samt kontrollcykeln, m, för antal
mät-platser, N, mellan 301 och 400 samt den valda faktorn, k=0,2, 0,5
eller 1,0. Avser längsgående, tvärgâende och övriga markeringar.
k=0,2 k=0,5 k=1,0 k=0,2 k=0,5 k=1,0 N n m n m n m N n m n m n rn 301 3 100 9 33 17 17 351 4 87 9 39 19 18 302 3 100 9 33 17 17 352 4 88 9 39 19 18 303 3 101 9 33 17 17 353 4 88 9 39 19 18 304 3 101 9 33 17 17 354 4 88 9 39 19 18 305 3 101 9 33 17 17 355 4 88 9 39 19 18 306 3 102 9 34 17 18 356 4 89 9 39 19 18 307 4 76 9 34 18 17 357 4 89 9 39 19 18 308 4 77 9 34 18 17 358 4 89 9 39 19 18 309 4 77 9 34 18 17 359 4 89 9 39 19 18 310 4 77 9 34 18 17 360 4 90 9 40 19 18 311 4 77 9 34 18 17 361 4 90 10 36 19 19 312 4 78 9 34 18 17 362 4 90 10 36 19 19 313 4 78 9 34 18 17 363 4 90 10 36 19 19 314 4 78 9 34 18 17 364 4 91 10 36 19 19 315 4 78 9 35 18 17 365 4 91 10 36 19 19 316 4 79 9 35 18 17 366 4 91 10 36 19 19 317 4 79 9 35 18 17 367 4 91 10 36 19 19 318 4 79 9 35 18 17 368 4 92 10 36 19 19 319 4 79 9 35 18 17 369 4 92 10 36 19 19 320 4 80 9 35 18 17 370 4 92 10 37 19 19 321 4 80 9 35 18 17 371 4 92 10 37 19 19 322 4 80 9 35 18 17 372 4 93 10 37 19 19 323 4 80 9 35 18 17 373 4 93 10 37 19 19 324 4 81 9 36 18 18 374 4 93 10 37 19 19 325 4 81 9 36 18 18 375 4 93 10 37 19 19 326 4 81 9 36 18 18 376 4 94 10 37 19 19 327 4 81 9 36 18 18 377 4 94 10 37 19 19 328 4 82 9 36 18 18 378 4 94 10 37 19 19 329 4 82 9 36 18 18 379 4 94 10 37 19 19 330 4 82 9 36 18 18 380 4 95 10 38 19 20 331 4 82 9 36 18 18 381 4 95 10 38 20 19 332 4 83 9 36 18 18 382 4 95 10 38 20 19 333 4 83 9 37 18 18 383 4 95 10 38 20 19 334 4 83 9 37 18 18 384 4 96 10 38 20 19 335 4 83 9 37 18 18 385 4 96 10 38 20 19 336 4 84 9 37 18 18 386 4 96 10 38 20 19 337 4 84 9 37 18 18 387 4 96 10 38 20 19 338 4 84 9 37 18 18 388 4 97 10 38 20 19 339 4 84 9 37 18 18 389 4 97 10 38 20 19 340 4 85 9 37 18 18 390 4 97 10 39 20 19 341 4 85 9 37 18 18 391 4 97 10 39 20 19 342 4 85 9 38 18 19 392 4 98 10 39 20 19 343 4 85 9 38 19 18 393 4 98 10 39 20 19 344 4 86 9 38 19 18 394 4 98 10 39 20 19 345 4 86 9 38 19 18 395 4 98 10 39 20 19 346 4 86 9 38 19 18 396 4 99 10 39 20 19 347 4 86 9 38 19 18 397 4 99 10 39 20 19 348 4 87 9 38 19 18 398 4 99 10 39 20 19 349 4 87 9 38 19 18 399 4 99 10 39 20 19 350 4 87 9 38 19 18 400 4 100 10 40 20 20
VTI meddelande 833
Bilaga 1 Sid 8 (19)
Tabell 7 Antalet utvalda matplatser, n, samt kontrollcykeln, m, för antal
mat-platser, N, mellan 401 och 500 samt den valda faktorn, k=0,2, 0,5
eller 1,0. Avser längsgående, tvärgâende och övriga markeringar.
0,2 k=0,5 k=1,0 0,2 k=0,5 k=1,0
k:= k:= IV rz n7 77 rn 77 nz ll rt ne rz n7 rt n7 401 4 100 10 40 20 20 451 4 112 11 41 21 21 402 4 100 10 40 20 20 452 4 113 11 41 21 21 403 4 100 10 40 20 20 453 4 113 11 41 21 21 404 4 101 10 40 20 20 454 4 113 11 41 21 21 405 4 101 10 40 20 20 455 4 113 11 41 21 21 406 4 101 10 40 20 20 456 4 114 11 41 21 21 407 4 101 10 40 20 20 457 4 114 11 41 21 21 408 4 102 10 40 20 20 458 4 114 11 41 21 21 409 4 102 10 40 20 20 459 4 114 11 41 21 21 410 4 102 10 41 20 20 460 4 115 11 41 21 21 411 4 102 10 41 20 20 461 4 115 11 41 21 21 412 4 103 10 41 20 20 462 4 115 11 42 21 22 413 4 103 10 41 20 20 463 4 115 11 42 22 21 414 4 103 10 41 20 20 464 4 116 11 42 22 21 415 4 103 10 41 20 20 465 4 116 11 42 22 21 416 4 104 10 41 20 20 466 4 116 11 42 22 21 417 4 104 10 41 20 20 467 4 116 11 42 22 21 418 4 104 10 41 20 20 468 4 117 11 42 22 21 419 4 104 10 41 20 20 469 4 117 11 42 22 21 420 4 105 10 42 20 21 470 4 117 11 42 22 21 421 4 105 10 42 21 20 471 4 117 11 42 22 21 422 4 105 10 42 21 20 472 4 118 11 42 22 21 423 4 105 10 42 21 20 473 4 118 11 43 22 21 424 4 106 10 42 21 20 474 4 118 11 43 22 21 425 4 106 10 42 21 20 475 4 118 11 43 22 21 426 4 106 10 42 21 20 476 4 119 11 43 22 21 427 4 106 10 42 21 20 477 4 119 11 43 22 21 428 4 107 10 42 21 20 478 4 119 11 43 22 21 429 4 107 10 42 21 20 479 4 119 11 43 22 21 430 4 107 10 43 21 20 480 4 120 11 43 22 21 431 4 107 10 43 21 20 481 4 120 11 43 22 21 432 4 108 10 43 21 20 482 4 120 11 43 22 21 433 4 108 10 43 21 20 483 4 120 11 43 22 21 434 4 108 10 43 21 20 484 4 121 11 44 22 22 435 4 108 10 43 21 20 485 4 121 11 44 22 22 436 4 109 10 43 21 20 486 4 121 11 44 22 22 437 4 109 10 43 21 20 487 4 121 11 44 22 22 438 4 109 10 43 21 20 488 4 122 11 44 22 22 439 4 109 10 43 21 20 489 4 122 11 44 22 22 440 4 110 10 44 21 20 490 4 122 11 44 22 22 441 4 110 11 40 21 21 491 4 122 11 44 22 22 442 4 110 11 40 21 21 492 4 123 11 44 22 22 443 4 110 11 40 21 21 493 4 123 11 44 22 22 444 4 111 11 40 21 21 494 4 123 11 44 22 22 445 4 111 11 40 21 21 495 4 123 11 45 22 22 446 4 111 11 40 21 21 496 4 124 11 45 22 22 447 4 111 11 40 21 21 497 4 124 11 45 22 22 448 4 112 11 40 21 21 498 4 124 11 45 22 22 449 4 112 11 40 21 21 499 4 124 11 45 22 22 450 4 112 11 40 21 21 500 4 125 11 45 22 22 VTI meddelande 833
Bilaga 1 Sid 9 (19)
2 Slumpvalstabell för beräkning av den första mätplatsen.
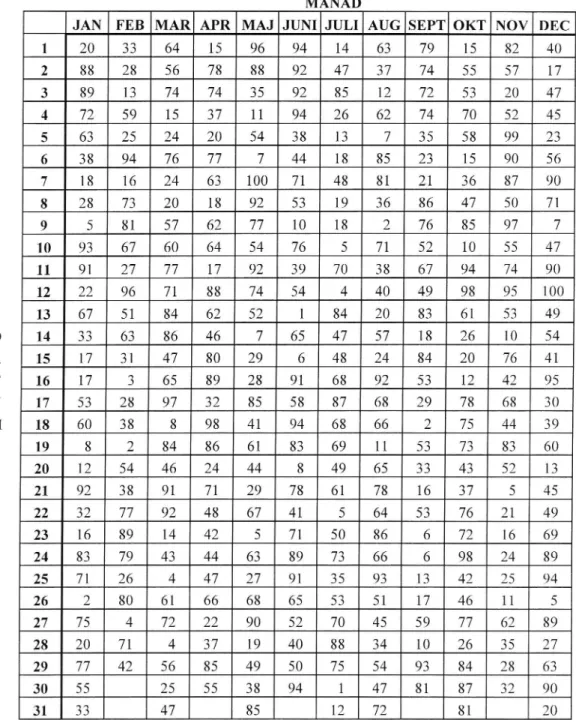
Exempel: Funktionskontroll ska göras den 13 oktober 1997. I tabell 8 avläses slumptalet x=61 för detta datum. x används för att beräkna den första mätplatsen, f, enligt avsnitt 4.6.
Tabell 8 Slumptalstabell. Gå in i kolumnenför månad då mätningen utförs och
raden för dagen dåfunktionskontrollen påbörjas. Detta ger Slumptalet x, vilket användsför att bestämma denförsta mätplatsen, f
:MÅNAD
JAN FEB MAR APR MAJ JUNI JULI AUG SEPT OKT NOV DEC
1 20 33 64 15 96 94 14 63 79 15 82 40 2 88 28 56 78 88 92 47 37 74 55 57 17 3 89 13 74 74 35 92 85 12 72 53 20 47 4 72 59 15 37 11 94 26 62 74 70 52 45 5 63 25 24 20 54 38 13 7 35 58 99 23 6 38 94 76 77 7 44 18 85 23 15 90 56 7 18 16 24 63 100 71 48 81 21 36 87 90 8 28 73 20 18 92 53 19 36 86 47 50 71 9 5 81 57 62 77 10 18 2 76 85 97 7 10 93 67 60 64 54 76 5 71 52 10 55 47 11 91 27 77 17 92 39 70 38 67 94 74 90 12 22 96 71 88 74 54 4 40 49 98 95 100 13 67 51 84 62 52 1 84 20 83 61 53 49 D 14 33 63 86 46 7 65 47 57 18 26 10 54 1A 15 17 31 47 80 29 6 48 24 84 20 76 41 T' 16 17 3 65 89 28 91 68 92 53 12 42 95 [1 17 53 28 97 32 85 58 87 68 29 78 68 30 NI 18 60 38 8 98 41 94 68 66 2 75 44 39 19 8 2 84 86 61 83 69 11 53 73 83 60 20 12 54 46 24 44 13 49 65 33 43 52 13 21 92 38 91 71 29 78 61 78 16 37 5 45 22 32 77 92 48 67 41 5 64 53 76 21 49 23 16 89 14 42 5 71 50 86 6 72 16 69 24 83 79 43 44 63 89 73 66 6 98 24 89 25 71 26 4 47 27 91 35 93 13 42 25 94 26 2 80 61 66 68 65 53 51 17 46 11 5 27 75 4 72 22 90 52 70 45 59 77 62 89 28 20 71 41 37 19 40 88 34 10 26 35 27 29 77 42 56 85 49 50 75 54 93 84 28 63 30 55 25 55 38 94 1 47 81 87 32 90 31 33 47 85 12 72 81 20
VTI meddelande 833
Bilaga 1 Sid 10 (19)
3 Den statistiska metoden
Tidigare mätningar har visat att mätvärden i ett objekt ofta avviker från normalför-delningen. Detta innebär att det kan vara direkt olämpligt att använda en variabel-metod (tex. t-test) - en sådan variabel-metod kan leda till felaktigt god- eller under-kännande. I stället är den föreslagna testet baserat på en så kallad attributmetod. Detta innebär att man indelar data i godkända och underkända mätvärden. På så sätt har man skaffat sig data som är binomialfördelade och man kan använda ett attributtest. En sådan metod innebär att man laborerar med fem parametrar:
oc Producenirisken. Den risk man tar att felaktigt underkänna ett objekt.
Här har vi valt oc = 0,05.
B Konsumenlrisken. Den risk man tar att felaktigt godkänna ett objekt.
Här har vi valtB=0,05.
g Godkännandegräns. Den kvalitetsnivå som kan anses vara rimlig att
kräva.
AQL Acceptable Quality Level. Den kvalitetsnivå som producenten bör
sträva efter att uppnå eller den nivå som konsumenten gärna vill ha.
LQ Limit Quality. Den kvalitetsnivå som konsumenten i värsta fall kan
acceptera eller den nivå som producenten absolut inte får gå under. Vanligen bestämmer man de fem parametrarna före testet och beräknar hur många mätningar man måste göra för att testa på önskad statistisk nivå och önskad kvalitetsnivå. I fallet med vägmarkeringar har det emellertid av flera skäl visat sig praktiskt att endast definiera oc, B och g samt omfattningen av testet, dvs. antalet mätningar som ska göras. Från detta kan man därefter beräkna AQL och LQ. Ett exempel kan vara klargörande: Vi gör ett test med 0L=B=0,05. Antalet mät-platser som ska kontrolleras har vi bestämt till 10 (n=lO) och vi tillåter att högst 10% (g=0,10), dvs. högst en av dessa får ha underkänt mätvärde (0:1). Från tabell 9 får vi AQL=0,04 och LQ=O,39.
Om mätningarna underkänner objektet (2 eller fler underkända mätplatser), så kan vi med stor säkerhet säga att fler än 4% (AQL=0,04) av mätplatserna är under-kända. Risken är dock 5% (oc=0,05) att underkännandet är felaktigt. Uppenbar-ligen har producenten inte lyckats nå det eftersträvade kvalitetsmålet på högst 4% underkända mätplatser.
Om mätningarna godkänner objektet (0 eller 1 underkända mätplatser), så kan vi med stor säkerhet säga att färre än 39% (LQ=O,39) av mätplatserna i delobj ektet är underkända. Risken är dock 5% (B=0,05) att godkännandet är felaktigt. Uppenbar-ligen har konsumenten fått en produkt som åtminstone uppfyller det lägsta accep-tabla kvalitetskravet, 39% underkända mätplatser.
Teorin bakom attributtestet beskrivs utförligt i Bergman & Klefsjö: Statistisk kvalitetsstyrning, utgiven på Studentlitteratur.
4 Bestämning av AQL och LQ för olika värden på n och c.
Tabell 9 Visar hur AQL och LQ varierar med n och 0, där n är sampelstorleken och 0 är tillåtet antal underkända utvalda mätplatser för att delobjektet ska godkännas. Man ska observera att tabellen endast gäller då N>lO°n, d.V.s. då man kontrollerar
Bilaga 1
Sid 11 (19)
färre än 10% av totala antalet mätplatser i delobj ektet.
Tabell 9 AQL och LQ för givna värden på sampelstorleken, n, och antalet
underkända utvalda mätplatser som tillåts, 0. Det förutsätts att
N>10-n samt att a=,3=0, 05.
6:0 C=l c:
n AQL LQ AQL LQ AQL LQ AQL LQ
1 0.05 0-95 2 0.03 0.78 0.22 0.97 3 002 0.63 0.14 0.86 0.37 0.98 4 om 0.53 0.10 0.75 0.25 0.90 0.47 0.99 5 om 0.45 0.08 0.66 0.19 0.81 0.34 0.92 6 om 0.39 0.06 0.58 0.15 0.73 0.27 0.85 7 om 0.35 0.05 0.52 0.13 0.66 0.23 0.77 8 om 0.31 0.05 0.47 0.11 0.60 0.19 0.71 9 om 0.28 0.04 0.43 0.10 0.55 0.17 0.66 10 om 0.26 0.04 0.39 0.09 0.51 0.15 0.61 11 0.00 0.24 0.03 0.36 0.08 0.47 0.14 0.56 12 000 0.22 0.03 0.34 0.07 0.44 0.12 0.53 13 0.00 0.21 0.03 0.32 0.07 0.41 0.11 0.49 14 000 0.19 0.03 0.30 0.06 0.39 0.10 0.47 15 000 0.18 0.02 0.28 0.06 0.36 0.10 0.44 16 0.00 0.17 0.02 0.26 0.05 0.34 0.09 0.42 17 000 0.16 0.02 0.25 0.05 0.33 0.08 0.40 18 000 0.15 0.02 0.24 0.05 0.31 0.08 0.38 19 0.00 0.15 0.02 0.23 0.04 0.30 0.08 0.36 20 000 0.14 0.02 0.22 0.04 0.28 0.07 0.34 21 000 0.13 0.02 0.21 0.04 0.27 0.07 0.33 22 000 0.13 0.02 0.20 0.04 0.26 0.06 0.32 23 000 0.12 0.02 0.19 0.04 0.25 0.06 0.30 24 000 0.12 0.02 0.18 0.03 0.24 0.06 0.29 25 000 0.11 0.01 0.18 0.03 0.23 0.06 0.28 26 000 0.11 0.01 0.17 0.03 0.22 0.05 0.27 27 000 0.11 0.01 0.16 0.03 0.22 0.05 0.26 28 000 0.10 0.01 0.16 0.03 0.21 0.05 0.25 29 000 0.10 0.01 0.15 0.03 0.20 0.05 0.25 30 000 0.10 0.01 0.15 0.03 0.20 0.05 0.24 VTI meddelande 833
Bilaga 1 Sid 12 (19)
5 Exempel på funktionskontroll av vägmarkeringar.
5.1 Förutsättningar
Strax innan garantitiden utgår vill väghållaren göra en funktionskontroll med avseende på retroreflexion och luminanskoefficient av ett objekt bestående av en 5,3 km lång 9-metersväg med två korsningar. Vägen är försedd med streckade kantlinjer och mittlinje som delvis är dubbel spärr. Av de två korsningarna är den ena en mindre fyrvägskorsning med stopplinje från två riktningar. Den andra är större med väjningslinje från sidovägarna samt körfältspilar, spärrfält (med skrafferingar och fyllda spetsar) och körfältslinj er på huvudvägen. Samtliga linjer är lagda samtidigt, för nästan två år sedan. Funktionskontrollen utförs den 22:a juni. Tillverkaren och väghållaren har skrivit in i kontraktet att antalet underkända
måtplatser rimligen kan få vara 10%.
5.2 Ambitionsnivå
Eftersom det rör sig om en garantikontroll, där funktionen kan förväntas vara nedsatt, vill man göra en stor kontroll och väljer k=0,5 (4.4).
5.3 Indelning av objektet i delobjekt
Objektet består av en väg med två korsningar, där samtliga markeringar är utlagda samtidigt. Varje typ av markering kommer att vara ett delobjekt enligt följande
(2.3):
0 höger kantlinje 0 vänster kantlinje 0 mittlinje 0 väjningslinje 0 stopplinje 0 körfältspil 0 spärrfalt, skraffering 0 spärrfalt, fylld spetsObjektet innehåller således 8 delobjekt.
5.4 Antalet mätplatser
För de längsgående linjerna gäller att varje mätplats är 12 meter lång. För övriga delobj ekt gäller att varje väjningslinje, varje stopplinje osv. är en matplats (2.4). För att avgöra antalet mätplatser måste sträckan inventeras. Man kör sträckan i vägens riktning (norrut) och mäter sträckans längd samt noterar antalet mätplatser för övriga delobjekt. Redan nu har man möjlighet att numrera varje mätplats för varje delobjekt (vilket dock inte är helt nödvändigt). Man finner följ ande:
Bilaga 1 Sid 13 (19)
Sträckans längd är exakt 5 330 meter. För de längsgående linjerna beräknas antalet mätplatser som (4.3):
= liv 2 444 (avrundat nedåt)
För de tre delobjekten höger kantlinje, vänster kantlinje och mittlinje kommer
mätplatserna att numreras från söder till norr (i vägens riktning) l, 2, 444
(4.2, figur 2).
För tva'rgåena'e och för Övriga markeringar räknade man vid inventeringen antalet mätplatser i vardera delobjekt och fann följande:
2 st mätplatser på väjningslinje, 2 st på stopplinje, 8 st på körfältspil, 2 st på spärr-fält/skraffering och 2 st på spärrfält/fylld spets. Dessa numreras också i vägens riktning och i förekommande fall från höger till vänster (4.2, figur 3). Således har
V12 0 höger kantlinje N=444 0 vänster kantlinje N=444 0 mittlinje N=444 0 väjningslinje N: 2 0 stopplinje N: 2 0 körfältspil N: 8 0 spärrfält, skraffering N: 2 0 spärrfält, fylld spets N: 2
5.5 Antalet utvalda mätplatser
Antalet utvalda mätplatser, n, beräknas som (4.4)
n = k - v/N
med i detta fall k=0,5. För de längsgående linjerna får vi
n = 0,5 - v/444 = 11 (korrekt avrundat)
Värdet på lilla n kan även fås i bilaga 1, för N=444, k=0,5 i tabell 7.
Kontrollcykeln beräknas som (4.5):
N 444 0
m = = 11 = 40 (avrundat nedat)
n
Även detta värde erhålls från tabell 7.
Bilaga 1 Sid 14 (19) Den första utvalda mätplatsen är (4.6):
x'(m,:12 _ 4117319:.1)
=
+ _..
:
f
100
1 00
+1 17 (korrekt avrundat)
där x erhålls från bilaga 1, tabell 8.
Således blir de utvalda mätplatserna: f, f+m, f+(n-1)m = 17, 57, 97, 137, 177,
217, 257, 297, 337, 377 och 417 vad gäller de längsgående linjerna. I praktiken
hittar man enklast dessa utvalda mätplatser genom att använda bilens tripmätare: Mätplatsens nummer multiplicerat med 12 är avståndet från delobjektets början till början på den utvalda mätplatsen.
De båda delobjekten med tvärgående markeringar har vardera två mätplatser.
Detta gör att antalet utvalda mätplatser, n, i vardera av dessa delobjekt beräknas
som:
n = 0,5 . Vi = 1 (korrekt avrundat)
För tvärgående markering gäller emellertid alltid n_>_2, varför i detta fall båda mätplatserna kommer att vara utvalda mätplatser. Detta framgår även av tabell 2. För körfältspilarna får vi:
n = 0,5 - x/»8 = 1 (korrekt avrundat)
Eftersom regeln 1122 gäller även för Övriga markeringar, innebär detta att 2 körfältspilar ska kontrolleras (tabell 2). Man får även från m=4 och den första utvalda mätplatsen beräknassom:
41- 4 -1
f = 44-) +1 : 2 (korrekt avrundat)
Detta innebär att körfältspilarna nummer 2 och 6 ska kontrolleras; dessa är de två utvalda mätplatserna för detta delobjekt. Beträffande spärrfälten gäller liksom för tvärgående markeringar att båda ska mätas.
Bilaga 1 Sid 15 (19) Vi har nu:
0 höger kantlinje N=444 n=11 m=4O l/E17 (för den 22:a juni)
0 vänster kantlinje N=444 n=1l m=40 f=17 0 mittlinje N=444 n=11 m=40 F17 0 väjningslinje N: 2 n=2 m= 1 ;ä 1 0 stopplinje N: 2 n=2 m= 1 f: 1 0 körfältspil N: 8 n=2 m= 4 F 2 0 spärrfält, skraffering N: 2 n=2 m: 1 F 1 0 spärrfält, fylld spets N: 2 n=2 m= je 1 5.6 Mätpunkter
För kantmarkeringarna gäller vad som sägs i 7.1.1. Detta innebär att retroref-lexionen mäts i 6 mätpunkter i vardera delobjekt (höger och vänster kantlinje) på var och en av de 11 utvalda mätplatserna. På samma sätt mäts luminans-koefflcienten i 3 mätpunkter på varje utvald mätplats. Sammanlagt kommer således funktionstestet för kantlinjerna att omfatta 66 mätningar av retroreflexion och 33 mätningar av luminanskoefflcient enligt vad som framgår av figur 4.
Beträffande mittlinj en ska 4 mätningar av retroreflexion och 2 mätningar av lumi-nanskoefflcient enligt 7.1.3 och 7.1.4 göras på varje utvald mätplats. Detta innebär sammanlagt 44 respektive 22 mätningar. Observera att där det är dubbel mittlinje, mäts enligt figur 4, men endast på den av de två linjerna som avser vägens riktning.
Enligt 7.2.1 är varje enskild hajtand i väjningslinjen en mätpunkt. Således är talet mätpunkter för både retroreflexionen och luminanskoefficienten lika med an-talet hajtänder på de båda utvalda mätplatserna.
För de två stopplinjerna gäller vad som sägs i 7.2.2. På den utvalda mätplatsen mäter man med en meters mellanrum (gäller både R och Qd); antalet mätpunkter är således proportionell mot stopplinjens längd.
Körfältspilarna antas vara enkla, vilket innebär att mätpunkterna enligt 7.3.1 åter-finns mitt på pilskaftet och mitt i pilspetsen (gäller både R och Qd). Sammanlagt görs således 4 mätningar avvardera funktionsparameter - två på vardera utvald körfältspil.
För skrafferingarna i spärrfältet gäller att mätning ska göras på den första, den mellersta och den sista enligt 7.3.3. Således görs sammanlagt 6 mätningar av R och Qd i de båda spärrfältens skrafferingar.
l vardera spärrfältet förutsätts finnas två fyllda spetsar - en i vardera ände. Båda ska mätas med en mätpunkt i mitten av varje (7.3.4).
Bilaga 1 Sid 16 (19)
För varje delobjekt gäller att den utvalda mätplatsens funktion ska beräknas som medelvärdet av funktionsvärdet i mätpunkterna (8). Detta innebär för kantlinj erna att den utvalda mätplatsens funktion med avseende på retroreflexion
år medelvärdet avde 6 enskilda funktionsvärdena. Det är detta medelvärde som
ligger till grund för godkännande eller underkännande, dvs. man noterar hur många av dessa medelvärden som ligger under gränsvärdet.
5.7 Krav för godkännande av delobjekt
Eftersom det enligt förutsättningarna gäller att högst 10% av de utvalda
mätplat-serna tillåts ha underkänt mätvärde, så har vi g=0,10. Enligt avsnitt 6 får vi då för
delobj ekten med längsgående markeringar:
c = g ' n = 0,10 - l 1 = 1 (korrekt avrundat) På samma sätt får vi för tvärgående och Övriga markeringar:
c : 0,10 - 2 : 0 (korrekt avrundat)
Således underkänns de längsgående markeringarna så snart man har funnit 2 ut-valda mätplatser med medelvärde under kravet. För tvärgående och övriga marke-ringar krävs att samtliga utvalda mätplatser uppfyller kravet.
Bilaga 1 Sid 17 (19)
5.8 Fiktiva mätresultat
Funktionskravet enligt Väg 94 är för både retroreilexionen och luminanskoef-fieienten 100 (med/m2)/luX. Vi antar att vi för varje enskild utvald matplats hade fått funktionsvärden enligt tabell 10 och 11.
Tabell 10 Retr0reflext'0nen, R, och luminanskoemcienten, Qd, för de samman-lagt 11 utvalda matplatserna i de 3 delobjekten med längsgående markeringar. Siffrorna inom parentes anger antalet matpunkter som den utvalda matplatsensfunktionsvarde är baserat på. Fet stil anger underkäntfunktionsva'rde.
vänster kant (0:1) mittlinje (0:1) höger kant (0:1)
utvald mät- R(6) Qd(3) R(4) Qd(2) R(6) Qd(3) plats nr. 17 111 187 100 188 87 98 57 109 186 102 187 88 102 97 121 188 101 190 120 121 137 122 191 103 184 121 123 177 123 192 105 184 120 124 217 97 190 110 185 91 110 257 122 185 100 187 122 131 297 101 190 101 199 130 130 337 102 158 102 197 133 135 377 113 190 108 196 135 129 417 119 193 107 189 131 128 antal. UK 1 0 0 0 3 1 Medel 113 186 104 190 116 121 st.avv. 9,5 9,7 3,4 5,3 18,5 12,3
Tabell 1] Retroreflexionen, R, och luminanskoefzeienten, Qd, för de samman-lagt 10 utvalda matplatserna i de 5 delobjekten med tva'rgaende eller Övriga markeringar. Fet stil anger underkäntfunktionsvarde.
delobj ekt utvald mät- R Qd
plats nr. väj ningslinj e 1 66 75 0:0 2 65 77 stopplinj e 1 92 75 0:0 2 1 12 1 3 9 körfältspil 2 1 50 1 98 0:0 6 1 5 9 197 spärrfalt/skraff. 1 23 1 1 86 0:0 2 222 1 85 spärrfalt/spets 1 245 1 83 0:0 2 23 3 1 80 VTI meddelande 833
Bilaga 1 Sid 18 (19)
Man noterar att vad gäller retroreflexionen har delobjekten höger kantlinje, väj-ningslinje samt stopplinje fler antalet underkända utvalda mätplatser än 0. Dessa delobj ekt underkänns således med avseende på retroreflexion.
Luminanskoefflcienten underkänns för delobjekten väjningslinje och stopplinje eftersom antalet underkända utvalda mätplatser är 2 respektive 1 och 0:0.
För de längsgående markeringarna kan vi, eftersom N>lO-n, använda tabell A9. Vi ser att för n=ll och 0:1 är AQL=0,03 och LQ=O,36. För tvärgående och Övriga markeringar är inte tabellA9 tillämpbar eftersom NSlO'n.
För vänster kantlinje och mittlinj en kan vi därför säga att färre än 36% av samtliga mätplatser är underkända (med 95% sannolikhet). Dessa delobjekt uppfyller den absolut lägsta kvalitetsnivån som Väghållaren kan acceptera.
Beträffande höger kantlinje törs vi uttala oss om att fler än 3% av samtliga mät-platser har ett funktionsvärde under kravet. Med andra ord har producenten med 95% sannolikhet inte lyckats uppnå den eftersträvansvärda kvalitetsnivån.
Man bör notera att av de längsgående markeringarna hade höger kantlinje högst medelvärde. Trots detta underkändes denna linje, medan de två andra godkändes. Detta tillskrivs helt den större spridningen i mätvärdena; höger kantlinje höll en alltför ojämn kvalitet. Man konstaterar således att attributmetoden inte är känslig endast för medelvärdet, utan även för mätvärdenas spridning (standardavvikelse). Antag att den högra kantlinjen kompletteras, där entreprenören tycker att den ser dålig ut. Väghållaren gör en omfattande funktionstest (k=l,O, n=21, 0:2) efter kompletteringen. Om linjen fortfarande är underkänd, kan man med detta om-fattande test säga att minst 4% av mätplatserna är underkända. Om den godkännes vet man att färre än 26% av mätplatserna är underkända. Man ser att ju större testet är, ju mer närmar sig AQL och LQ värdet på g. Om vi väljer att mäta på samtliga 444 mätplatser gäller AQL=LQ=g=O,lO. Ett underkännande då, innebär att fler än 10% (A QL=O,10) av mätplatserna är underkända, medan ett godkännan-de innebär att färre än 10% (LQ=O,10) är ungodkännan-derkända.
5.9 Slutsats
Om mätningar enligt föreslagen metod för funktionstest hade givit resultat enligt tabellerna 10 och 11 hade man dragit följande slutsatser:
Retrorejlexionen: Höger kantlinje samt väjnings- och stopplinjerna är under-kända. Övriga delobj ekt är godunder-kända.
Luminanskoefficienten: Väjnings- och stopplinjerna är underkända. Övriga del-objekt är godkända.




![Tabell 3 Antalet utvalda mätplatser, n, samt kontrollcykeln, m, för antal mat- mat-platser, N, mellan 10] 0017 200 samt den valda faktorn, k:0,2, 0,5](https://thumb-eu.123doks.com/thumbv2/5dokorg/4863356.132411/33.892.183.660.221.1033/tabell-antalet-utvalda-mätplatser-kontrollcykeln-platser-valda-faktorn.webp)
![Tabell 4 Antalet utvalda matplatser, n, samt kantrolleykeln, rn, för antal mat- mat-platser, N, mellan 10] och 200 samt den valda faktorn, k=0,2, 0,5](https://thumb-eu.123doks.com/thumbv2/5dokorg/4863356.132411/34.892.180.661.226.1038/tabell-antalet-utvalda-matplatser-kantrolleykeln-platser-valda-faktorn.webp)