Spårriktning med hjälp av
GNSS-teknik
En del av projekt SIMTRACK
TI VTI rapport 1045
Utgivningsår 2020 vti.se/publikationer Ragnar Hedström
VTI rapport 1045
Spårriktning med hjälp av GNSS-teknik
En del av projekt SIMTRACK
Författare: Ragnar Hedström (VTI, https://orcid.org/0000-0001-8715-9767) Diarienummer: 2018/0073-9.1
Publikation: VTI rapport 1045 Utgiven av VTI, 2020
Referat
Initialt har det färdigbyggda spåret ett så kallat absolutläge i förhållande till de koordinater spåret projekteras utifrån. Med tiden kommer tågtrafiken, genomförda underhållsåtgärder och klimatet att påverka krafterna i spåret och därmed förändra spårets läge i förhållande till sitt absolutläge, det vill säga spårlägesfel uppstår. Genom att spårrikta spåret kan spårlägesfelen till viss del återställas men spåret kan inte genom enbart spårriktning återställas till sitt ursprungliga läge, det vill säga absolut-läget. Om spåret ska återställas till sitt absolutläge måste inmätning av spåret göras, en process som är både tidskrävande och medför stora kostnader. Inmätning av spåret görs i dagsläget till övervägande del manuellt. För att kunna göra inmätning av spåret måste man utgå från någon typ av referenssystem i form av stomnät, anslutningsnät samt bruksnät. Traditionellt sett etableras och vidmakthålls nät med fasta referenspunkter för mätning, så kallade stomnät. De utgör referens för den operativa geodetiska mätningen
Syftet med projektet är att undersöka förutsättningar och möjligheter att med hjälp av GNSS (Global Navigation Satellite Systems) skapa underlag i form av indata för att genomföra spårriktningsinsatser. Avsikten är även att diskutera effekterna av att spåret inte återställs till sitt absolutläge.
Spårets absoluta läge har stor relevans och det finns tydliga tecken på att behovet av information om absolutläget är stort. Spårets förändring från sitt absoluta läge påverkar spårets egenskaper (t.ex. rälsmängd och spänningsfri temperatur) på sätt som det inte alltid går att ha kontroll över. Det finns ett omfattande regelverk i form av Trafikverksdokument, så kallade TDOK. Flera av de toleranskrav som förekommer hänvisar till värden i förhållande till spårets absolutläge samtidigt som det inte alltid finns information om spårets absoluta läge alternativt att det inte går att återställa med rimliga insatser.
Titel: Spårriktning med hjälp av GNSS-teknik. En del av projektet
SIMTRACK
Författare: Ragnar Hedström (VTI, https://orcid.org/0000-0001-8715-9767)
Utgivare: VTI, Statens väg- och transportforskningsinstitut
www.vti.se
Serie och nr: VTI rapport 1045
Utgivningsår: 2020
VTI:s diarienr: 2018/0073-9.1
ISSN: 0347–6030
Projektnamn: SIMTRACK
Uppdragsgivare: Trafikverket
Nyckelord: Spårunderhåll, spårriktning
Språk: Svenska
Abstract
Initially, the completed track has a so-called absolute position in relation to the coordinates on which the project planning of the track is done. Over time, train traffic, completed maintenance measures and the climate will affect the forces in the track, thereby changing the track's position in relation to its absolute position, i.e. track position faults occur. Track position faults can be restored to some extent by realigning the track, but the track cannot be restored to its original position, i.e. the absolute position, by track alignment alone. If the track is to be restored to its absolute position, it must be measured by surveying, a process that is both time-consuming and very costly. At present,
measurement of track is almost always done manually. Accurate measurement of track must be based on some type of reference system in the form of control networks, connection networks and working networks. Traditionally, networks are established and maintained with fixed reference points for measurement, known as control networks. They represent the reference for operational geodetic measurement.
The purpose of the project is to investigate conditions and possibilities for using GNSS (Global Navigation Satellite Systems) to create a basis in the form of input data for track alignment work. The intention is also to discuss the effects of the track not being restored to its absolute position.
The absolute position of the track is highly relevant and there are clear signs that there is a great need for information about the absolute position. The movement of track from its absolute position affects the characteristics of the track (e.g. rail volume and stress-free temperature) in ways that cannot always be controlled.
There is a comprehensive regulatory framework in the form of Swedish Transport Administration documents, known as TDOKs. A number of the tolerance requirements that exist refer to values that relate to the track's absolute position, but information about the absolute position of the track is not always available or alternatively it is not possible to restore it with reasonable measures.
Title: Track alignment with the aid of GNSS technology. A part of the
SIMTRACK project
Author: Ragnar Hedström (VTI, https://orcid.org/0000-0001-8715-9767)
Publisher: Swedish National Road and Transport Research Institute (VTI)
www.vti.se
Publication No.: VTI rapport 1045
Published: 2020
Reg. No., VTI: 2018/0073-9.1
ISSN: 0347–6030
Project: SIMTRACK
Commissioned by: The Swedish Transport Administration
Keywords: Track maintenance, track alignment
Language: Swedish
Förord
Föreliggande rapport utgör slutredovisning av projektet ”Spårriktning med hjälp av GNSS-teknik, en del av projektet SIMTRACK. Projektet har finansierats av BVFF/Trafikverket och genomförts vid Statens väg- och transportforskningsinstitut, VTI. Projektledare Ragnar Hedström har genomfört projektet och även skrivit rapporten. Trafikverkets kontaktperson har varit Arne Nissen.
Ett varmt tack riktas till alla personer från Trafikverket och spårentreprenörer som bidragit med värdefulla synpunkter på projektets upplägg och inriktning.
Linköping, maj 2020
Ragnar Hedström Projektledare
Kvalitetsgranskning
Intern peer review har genomförts 15 april 2020 av Arne Nissen och 4 maj 2020 av Leif Sjögren. Ragnar Hedström har genomfört justeringar av slutligt rapportmanus. Forskningschef Maria Mäkitalo har därefter granskat och godkänt publikationen för publicering 27 maj 2020. De slutsatser och rekommendationer som uttrycks är författarens/författarnas egna och speglar inte nödvändigtvis myndigheten VTI:s uppfattning.
Quality review
An internal peer review was conducted on 15 April 2020 by Arne Nissen and on 4 May 2020 by Leif Sjögren. Ragnar Hedström has made adjustments to the final report. Research Director Maria Mäkitalo has thereafter reviewed and approved the report for publication on 27 May 2020. The conclusions and recommendations in the report are those of the authorand do not necessarily reflect the views of VTI as a government agency.
Innehållsförteckning
Sammanfattning ...9 Summary ...11 1. Bakgrund ...13 1.1. Syfte ...13 1.2. Metod ...13 1.3. Definitioner ...142. Stomnät och byggnät ...15
2.1. Allmänt...15
2.2. Vad är ett stomnät? ...15
2.3. Stomnätsunderhåll ...17
2.4. Modeller för stomnät ...17
2.5. Nätverks-RTK/projektanpassad Nätverks-RTK ...18
2.6. Koordinat baserade referenssystem som används inom Trafikverket ...19
3. Spårläge/spårlägeskontroll ...21
3.1. Allmänt...21
3.1.1. Några definitioner med avseende på spårläge ...21
3.2. Kontroll av spårläget ...22
3.3. Spårets absoluta läge ...24
3.4. Geodetisk mätning ...26
3.5. Krav på spårläge, toleranser ...28
4. Spårriktning ...33
4.1. Antal riktade spårkilometer ...34
4.2. Effekter av spårlägesfel och spårriktning ...35
4.3. Temperaturer – några viktiga begrepp ...36
4.4. Spårkrafter ...37
5. Satellitmätning ...39
5.1. Faktorer som påverkar mätosäkerheten ...41
5.2. Exempel på några tidigare genomförda studier...42
5.3. Vad säger praktiken ...45
6. Diskussion och avslutande reflektioner ...47
Sammanfattning
Spårriktning med hjälp av GNSS-teknik – en del av projektet SIMTRACK
av Ragnar Hedström, VTI
Vid projektering av exempelvis en ny järnvägssträcka eller växelanslutning bestäms det geografiska läget i plan och höjd via ett koordinatsystem där punkternas läge kan uttryckas med numeriska värden. En förutsättning för denna entydighet är det geodetiska referenssystemet, det vill säga ett fast kopplat koordinatsystem i förhållande till jorden. Detta referenssystem är uppbyggt av koordinatsystem som relateras till jorden genom att koordinater har definierats för ett rikstäckande referensnät.
Initialt har därför det färdigbyggda spåret ett så kallat absolutläge i förhållande till de koordinater spåret projekterats utifrån. Med tiden kommer trafikering, genomförda underhållsåtgärder och klimatet att påverka krafterna i spåret och därmed förändra spårets läge i förhållande till sitt absolutläge. Denna förändring innebär att så kallade spårlägesfel uppkommer. Förutom att komforten påverkas så inverkar spårlägesfelen även på spårets nedbrytningsprocess. Ytterligare en effekt av spårlägesfel är slitage på fordonen.
Med hjälp av spårriktning kan spårlägesfelen till viss del återställas men spåret kan inte genom enbart spårriktning återställas till sitt ursprungliga läge, dvs. absolutläget. Den spårriktning som sker
genomförs till övervägande del som så kallad utjämning. Manuell inmätning av spåret måste göras om spåret ska återställas till sitt absolutläge, en process som är tidskrävande och medför stora kostnader. Återställande av projekterat läge är ofta det enda sättet att få flera spårs geometrier att passa ihop på rätt sätt när de är sammanfogade i komplexa växelförbindelser.
Spårets absoluta läge mäts med lämplig godkänd mätutrustning, t.ex. totalstation eller avvägnings-instrument. Inmätt läge hos spåret/rälen ”kopplar” till ett geodetiskt referenssystem vilket möjliggör att mätpunkten kan koordinatbestämmas.
Lägesbestämning med hjälp av GNSS (Global Navigation Satellite Systems) har en mätosäkerhet på centimeternivå (Lantmäteriet 2014) vilket inte motsvarar kraven för inmätning av spårets absolutläge. I situationer där lägre noggrannhet kan accepteras kan dock tekniken vara ett alternativ. GNSS-baserad detaljmätning utförs huvudsakligen som produktionsanpassad bärvågsmätning i realtid via GNSS/RTK (Real Time Kinematic). Tekniken delas in i enkelstations RTK (om en referensstation utnyttjas) eller nätverks-RTK (om flera referensstationer utnyttjas).
Mätinstrumentets prestanda (inklusive antenn), avståndet till referensstation(er), förtätningsgraden i stationsnätet samt osäkerhetskällor vid mättillfället (t.ex. jonosfär troposfär, satellitgeometri, flervägsstörningar) är faktorer som påverkar mätosäkerheten vid detaljmätning med GNSS/RTK (Lantmäteriet, 2017). Genom val av inmätningsmetodik och observationsfiltrering kan mätosäkerheten påverkas. Mätosäkerheten ökar med avståndet till lokal referensstation vid mätning med enkelstations-RTK medan avståndsberoendet är mindre vid mätning med nätverks-enkelstations-RTK, förutsatt att mätning utanför stationsnätet (dvs. extrapolering) undviks. I tunnlar och sträckor där sikten mot satelliterna är begränsad (skärningar och hög skog) behöver ett traditionellt stomnät finnas även i fortsättningen. Det beror på att satellitsignalerna är mycket svaga och inte klarar av att penetrera träd eller tjockare material.
I dagsläget uppfyller GNSS/RTK tekniken inte kraven på lägesnoggrannhet vid växlar och plattformar eller motsvarande. Anledningen till det är att den erhållna noggrannheten inte motsvarar den höga förväntan som man har haft på GNSS-tekniken. Förväntningarna är dock att noggrannheten kommer att förbättras med fler satelliter/satellitsystem och förbättrad beräkningsteknik.
Vidare kan man konstatera att:
•
Spårets absoluta läge är relevant och det finns ett behov av att spåret ligger i sitt absolutläge. Speciellt viktigt är detta vid komplicerade växelförbindelser, snäva kurvor, växlar inormalhuvudspår, anslutning av flera spårs geometrier, etc. där toleranskraven är höga. På dessa platser är det starkt motiverat med manuell inmätning av spåret.
• Spårriktning på linjen med utjämning är vanligare än spårriktning med utsättning som är både dyrare och mer tidskrävande. Det finns indikationer på att bristande kompetensutveckling kommer att påverka kvaliteten på resultaten från mätningstekniska tjänster och att geodesi-kulturen inte finns kvar om några år.
• Det finns ett omfattande regelverk i form av ett stort antal Trafikverksdokument, TDOK. Dessa dokument innehåller olika typer av spårlägesbegrepp, toleransnivåer, gränsvärden spårgeometriska krav, mätningstekniska krav, etc. och där hänvisningar görs mellan olika dokument. Flera av de toleranskrav som förekommer hänvisar till värden i förhållande till spårets absolutläge samtidigt som det inte alltid finns information om spårets absoluta läge alternativt att det inte går att återställa med rimliga insatser.
Summary
Track alignment with the aid of GNSS technology – part of the SIMTRACK project
by Ragnar Hedström (VTI)
When planning, for example, a new stretch of railway line or point connections, the geographical location in plane and elevation is determined via a coordinate system in which the position of the various points can be expressed as numerical values. A prerequisite for this unique positioning is the
geodetic reference system, which is a fixed and interconnected coordinate system in relation to the
earth. This reference system is made up of coordinate systems that have been related to the earth by defining coordinates for a nationwide reference network.
Initially therefore, the completed track has a so-called absolute position in relation to the coordinates on which the project planning of the track is done. Over time, train traffic, completed maintenance measures and the climate will affect the forces in the track, thereby changing the track's position in relation to its absolute position. This change means that so-called track position faults occur. In addition to affecting comfort, track position faults also affect the track’s structural degradation process. Another effect of track position faults is wear on the vehicles.
Track position faults can be restored to some extent with the aid of track realignment, but the track cannot be restored to its original position, i.e. the absolute position, by track alignment alone. The track alignment that takes place is predominantly done as an evening-out process. If the track is to be restored to its absolute position, it must be measured manually by surveying, a process that is both time-consuming and very costly. Restoring the originally planned position is often the only way to make the geometries of multiple tracks fit together correctly when they are joined together in complex points connections.
The absolute position of the track is measured by appropriate approved measuring equipment, such as total stations or levelling instruments. The measured position of the track/rail “connects” to a geodetic reference system, which allows the coordinates of the measuring points to be determined.
Positioning using GNSS (Global Navigation Satellite Systems) has a measurement uncertainty at centimetre level (Swedish Mapping, Cadastral and Land Registration Authority 2014), which does not meet the requirements for measuring the track's absolute position. However, in situations where lower accuracy may be acceptable, GNSS technology may be an option. GNSS-based detailed measurement is mainly performed as a production-adapted carrier wave measurement in real time via GNSS/RTK (Real Time Kinematic). The technology is divided into single-station RTK (if one reference station is used) or network RTK (if several reference stations are used).
The performance of the measuring instrument (including antenna), the distance to the reference station(s), the degree of densification of the station network and sources of uncertainty at the time of measurement (e.g. ionosphere, troposphere, satellite geometry, multi-path interference) are factors that affect the measurement uncertainty when measuring in detail with GNSS/RTK (Swedish Mapping, Cadastral and Land Registration Authority, 2017). The measurement uncertainty can be affected by the choice of measurement methodology and observation filtration. The measurement uncertainty increases with the distance to the local reference station when measuring with single-station RTK, while the distance dependence is less when measuring with network RTK, provided that measurement outside the station network (i.e. extrapolation) is avoided. In tunnels and stretches where satellite visibility is limited (cuttings and high forest), there is still a need for a traditional control network. This is because the satellite signals are very weak and are unable to penetrate trees or thicker materials.
At present, GNSS/RTK technology does not fulfil the requirements for positioning accuracy at points and platforms or similar. The reason for this is that the accuracy obtained does not correspond to the high expectations that there were for GNSS technology. However, expectations are that accuracy will be improved with more satellites/satellite systems and improved computational technology.
Furthermore, it can be noted that:
•
The absolute position of the track is relevant and there is a need for the track to be in its absolute position. This is especially important for complicated points connections, tight curves, points in normal main tracks, connections of the geometries of several tracks, etc. where tolerance requirements are high. In these places manual surveying of the track is strongly justified.• Track alignment by levelling on the line is more common than track alignment by staking out, which is both more expensive and more time-consuming. There are indications that increasing competences shortages will affect the quality of the results of surveying services and that the geodetic culture will cease to exist in a few years' time.
• There is a comprehensive regulatory framework in the form of a large number of Swedish Transport Administration documents, known as TDOKs. These documents contain different types of track position terms, tolerance levels, limit values, track geometry requirements, technical requirements for measurements etc. and include references between different documents. A number of the tolerance requirements that exist refer to values that relate to the track's absolute position, but information about the absolute position of the track is not always available or alternatively it is not possible to restore it with reasonable measures.
1.
Bakgrund
I samband med nybyggnation av ett järnvägsspår görs en projektering av den tänkta linjedragningen. Initialt har således det färdigbyggda spåret ett så kallat absolutläge i förhållande till de koordinater spåret projekterats utifrån. Med tiden kommer trafikering, genomförda underhållsåtgärder och klimatet att påverka krafterna i spåret och därmed förändra spårets läge i förhållande till sitt absolutläge. Denna förändring innebär att så kallade spårlägesfel uppkommer och förutom att komforten påverkas så inverkar spårlägesfelen även på spårets nedbrytningsprocess.
Genom spårriktning kan spårlägesfelen till viss del åtgärdas men spåret kan inte genom enbart spårriktning återställas till sitt ursprungliga läge, dvs. absolutläget. Den spårriktning som sker, genomförs till övervägande del som så kallad utjämning.
Om spåret ska återställas till sitt absoluta läge måste inmätning av spåret göras, en process som är både tidskrävande och medför stora kostnader. Inmätning av spåret görs i dagsläget till övervägande del manuellt med t.ex. totalstation eller avvägningsinstrument. För att göra inmätning av spåret måste man utgå från någon typ av referenssystem i form av stomnät, anslutningsnät samt bruksnät. I vissa
situationer kan inmätningen med hjälp av information från någon typ av satellitsystem, GNSS (Global Navigation Satellite Systems) vara ett alternativ till manuell inmätning.
Geodetisk mätning går som en röd tråd genom anläggningens livscykel och är ett verktyg för lägesbestämning av objekt inom och utom anläggningen (Trafikverket 2013). Traditionellt sett etableras och vidmakthålls nät med fasta referenspunkter för mätning, så kallade stomnät. De utgör referens för den operativa geodetiska mätningen som omfattar
• inmätning, datainsamling för projektering
• utsättning, styrning av läge för objekt vid byggnation
• kvalitetssäkring, verifiering av läge på byggt objekt genom inmätning och jämförelse mot tolerans
• inmätning, underlag för relationshandling som sedan används för förvaltningsdata.
1.1. Syfte
Syftet med detta projekt är att undersöka förutsättningar och möjligheter att med hjälp av GNSS-teknik öka noggrannheten att rikta spåret till ett bra läge. Avsikten är även att diskutera effekterna av att spåret inte återställs till sitt absolutläge samt vilka toleranskrav som kan eller bör ställas på spårriktning och spårets absoluta läge.
1.2. Metod
Underlaget till rapporten bygger på en litteraturgenomgång samt relevanta föreskrifter (TDOK) inom Trafikverket. Projektet är ett delprojekt till BVFF-projektet ” Simulation of railway track geometry and intelligent maintenance planning (SIMTRACK) som genomförts vid Luleå Tekniska Universitet (LTU). Inom ramen för LTU:s arbete har projektet medverkat i ett flertal projektmöten. Dessutom har ett flertal intervjuer genomförts med spårentreprenörer.
1.3. Definitioner
För att underlätta den fortsatta läsningen av rapporten redovisas i detta avsnitt några definitioner som återfinns i efterföljande text.
Tabell 1. Definition av några aktuella begrepp. (Källa: TDOK 2016:0257)
Anslutningsnät Anslutningsnätet består av stompunkter (anslutningspunkter) vars funktion är att fungera som utgångspunkter för bestämning av bruksnäten i såväl plan som höjd och som ingår i anslutningsnäten. Stomnät ska anslutas till den nationella realiseringen av SWEREF 99 och RH 2000.
Bruksnät Bruksnäten består av stompunkter (brukspunkter) vars funktion är att fungera som utgångspunkter för detaljmätning i såväl plan som höjd.
Detaljmätning
(geodetisk) Inmätning eller utsättning av geografiskt relaterade objekt.
Referenssystem - All lägesangivelse förutsätter någon form av referenssystem. Vanligen sker uppdelningen som tre-dimensionella system, eller som ett två-dimensionellt system (plansystem) samt ett höjdsystem.
- Ett geodetiskt referenssystem används för att ange punkter på marken i förhållande till jordytan, geoiden, ellipsoiden och/eller deras förändringar med tiden.
- Nationella tre-dimensionella system är SWEREF 99, som är en realisering av det europeiska geodetiska referenssystemet ETRS 89. Lantmäteriet ansvarar för de nationella referenssystemen.
Rikets höjdsystem,
RH 2000 Rikets höjdsystem 2000 (RH 2000) baseras på den tredje precisionsavvägningen (1978–2003). Nollpunkt ligger i Amsterdam. SWEREFF 99 Svensk realisering av det europeiska geodetiska referenssystemet ETRS 89. Definieras
av de 21 fundamentalpunkterna ingående i det nationella nätet av fasta referensstationer för GNSS.
GNSS Global Navigation Satellite Systems
RTK Real-Time Kinematic, är ett annat namn för relativ bärvågsmätning i realtid
Tågkategori A Fordon som är godkända för en rälsförhöjningsbrist (hb) på 100 mm (sidoacceleration 0,65 m/S2)
2.
Stomnät och byggnät
2.1. Allmänt
Vid projektering av en ny järnvägssträcka eller växelanslutning krävs att objektens geografiska läge kan bestämmas i såväl plan som höjd men för att representera en punkts läge måste det finnas ett koordinatsystem där punkternas läge kan utryckas med numeriska värden (Trafikverket, 2014). Ett
geodetiskt referenssystem, dvs. ett fast kopplat koordinatsystem i förhållande till jorden, är en
förutsättning för att skapa entydighet. Detta referenssystem är uppbyggt av koordinatsystem som relateras till jorden genom att koordinater har definierats för ett rikstäckande referensnät.
Koordinaterna i referensnätet definieras av markerade punkter i marken, som exempelvis Figur 1. Principiellt finns det två olika sätt att realisera ett geodetiskt referenssystem, antingen i form av ett på marken markerat referenssystem, så kallat stomnät, eller i form av ett satellitbaserat referensnät.
Figur 1. Exempel på markplacerad koordinatpunkt i ett referensnät. (Källa: Törnvall, 2017) Ett geodetiskt referenssystem som är väl utbyggt och underhålls kontinuerligt skapar bra
förutsättningar för en entydig och gemensam lägesbild. I dagsläget (Trafikverket, 2014) har ca hälften av Trafikverkets spår en koordinatbaserad spårgeometrisk beskrivning, men det finns ett stort behov av att åtgärda resterande delar för att få en heltäckande beskrivning. Det kräver dock ett geodetiskt stomnät som täcker berörda områden.
2.2. Vad är ett stomnät?
Stompunkter i ett stomnät benämns ofta utifrån det sätt de har bestämts, t.ex. triangelpunkter, polygonpunkter, etc. (Lantmäteriverket, 2013). Triangelnät och polygonnät är de traditionella nättyperna för stomnät i plan, se Figur 2. I triangelnäten har varje ny punkt vanligen anknytning till minst tre andra punkter. I polygonnätet gäller detta endast för nätets knutpunkter; inuti respektive polygontåg har varje punkt normalt endast anknytning till de två närmaste.
Förr utnyttjades vanligen stompunkter i bruksnät. Bruksnäten knöts ihop och anslöts till ett överordnat nät, ett anslutningsnät, som dessutom ibland utgjorde länken till riksnätet. Denna hierarkiska indelning av stomnäten är funktionsanpassade. Av mätnings- och beräkningstekniska skäl fanns även en mer produktionsanpassad stomnätsindelning.
Figur 2. Exempel på a) triangelnät och b) polygonnät. (Källa: Lantmäteriet, 2013)
All detaljmätning relateras direkt eller indirekt till ett referenssystem. Vid geodetisk mätning sker detta via markerade stompunkter i ett stomnät, t.ex. ett kommunalt bruksnät eller ett primärt nät på en byggarbetsplats, (Lantmäteriverket, 2013).
Dagens modell för att etablera geodetiska stomnät för järnvägen är framtagen för att tillgodose de krav som ställs ur ett spårgeometriskt perspektiv. Modellen bygger på att ett (övergripande) anslutningsnät upprättas för berört område (Trafikverket, 2014). Anslutningsnätet är anslutningen/kopplingen mellan ”rikets nät” (Sveriges nationella geodetiska referenssystem) och det lokala bruksnätet. Därefter
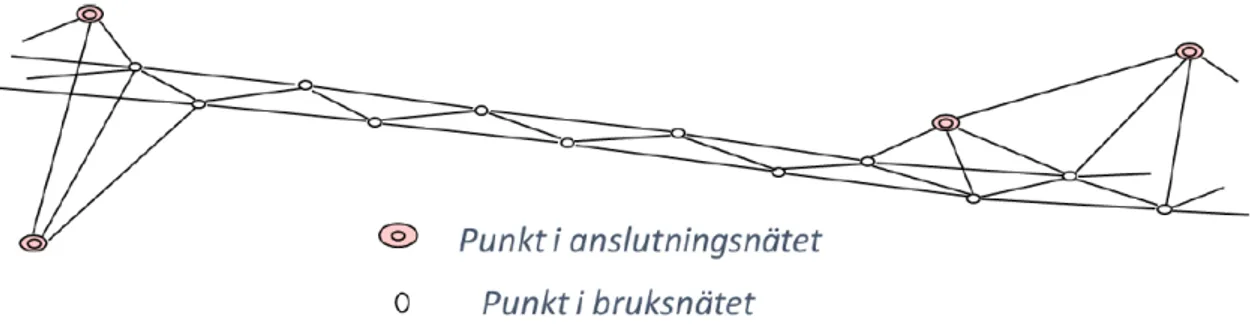
upprättas ett bruksnät utifrån anslutningsnätet Figur 3. Bruksnätet, vilket framgår av namnet, är det nät av mätpunkter, som används vid utsättning eller inmätning i Trafikverkets projekt. Punkterna är vanligtvis markerade med någon typ av järnrör/järndubb, som är omsorgsfullt förankrade i berg, i marken, i fundament eller sockel (se Figur 1). Förfaringssättet leder till få administrativa gränser som annars skulle kunna innebära stora kvalitetsbrister och dessutom öka kostnaden för administrationen av stomnät, spårgeometri och annan anläggningsinformation.
Figur 3. Exempelskiss på hur anslutningspunkter och brukspunkter kan förhålla sig till varandra. (Källa: Trafikverket, 2014).
Idag har dock satellittekniken (GNSS) förändrat villkoren. Dels används satellittekniken för att bestämma alla typer av plana stomnät, dels har den nya tekniken i sig reducerat behovet av markerade stompunkter betydligt. Höjdnäten har samma hierarkiska indelning som de plana näten, dvs. riksnät, anslutningsnät, bruksnät. (Lantmäteriverket, 2013). Att kunna bestämma punkters läge just där behovet finns är av stort intresse men de begränsningar som satellitnavigationssystem fortfarande har kan det inte, utifrån de krav på noggrannhet som järnvägen har, ersätta på marken markerade punkter (Trafikverket, 2014).
2.3. Stomnätsunderhåll
Underhållet av stomnätet avsett för järnvägens infrastruktur har bedrivits på varierande nivåer sedan början av 90-talet. Under år 2000 genomfördes en utredning som berörde behovet och kostnaderna för underhållet av det geodetiska stomnätet. Resultatet från utredningen i kombination med dåvarande Banverkets underhållsmodell för anläggningsunderhåll ligger till grund för det stomnätsunderhåll som bedrivs idag. Från och med 2006 är underhållet av stomnätet nationellt samordnat, (Trafikverket, 2014).
Underhållet av stomnätet idag utförs, grovt beskrivet, i form av en inventering/besiktning dels av det fysiska stomnätet (de markerade koordinatbestämda punkterna) dels av den dokumentation som finns. Utifrån resultatet från besiktningen upprättas ett åtgärdsförslag.
Planeringen av underhållet, dvs. var och när underhållet ska ske utgår från en sjuårscykel, som baseras på behoven i underhålls- och investeringsverksamheten samt inrapporterade brister som inte åtgärdats. Detta har varit grundläggande för det nationella arbetet. Någon ordentlig utvärdering har aldrig genomförts, främst på grund av att tilldelningen av underhållsmedel har varit kraftigt varierande. Det har inneburit att det inte finns tillräckligt bra statistiskt underlag avseende utfall och konsekvens eftersom underhållet inte kan anses ha bedrivits systematiskt. En annan anledning till bristande underlag är att nyttjarna varit obenägna att på ett formellt, eller åtminstone ordnat sätt, rapportera om konsekvenserna av ett bristfälligt underhållet stomnät.
Andra metoder för realisering och underhåll studeras kontinuerligt för att se om teknikutvecklingen kan ge oss möjlighet till förbättringar ur ett ekonomiskt, effektivitets- eller kvalitetsmässigt perspektiv. Tillförlitlighet, bland annat aktualitet är en förutsättning för framtida användning av lägesbunden information från olika databaser. Ytterligare en förutsättning för att hålla databaser kontinuerligt uppdaterade är att förändringar registreras vid källan. Om denna registrering inte görs i ett gemensamt geodetiskt referenssystem leder det ofta till en försämring av lägesnoggrannheten och vad värre är, risk för fatala fel. För att kunna utgöra den referensram som behövs för Trafikverkets olika verksamheter samt för att bibehålla sitt värde (550 miljoner kronor), både tekniskt och ekonomiskt, behöver därför de befintliga stomnäten inventeras och uppdateras löpande. (Trafikverket, 2014).
Lantmäteriet har beslutat att inte längre underhålla de markerade punkter som kallas Rix 95-punkterna och som uppgår till ca 10 000 stycken. De enda markerade punkter i plan som Lantmäteriet kommer att underhålla i fortsättningen är de 300 så kallade Sweref-punkterna, vilka är jämnt fördelade över landet, (Trafikverket 2013). Det betyder alltså ett betydligt glesare ”nät” av punkter jämfört med Rix 95-punkterna. 50 av Sweref-punkterna mäts varje år vilket innebär att de har ett 6-årigt ajourförings-intervall. Höjdsystemet RH 2000 består ursprungligen av cirka 5 000 markerade fixpunkter. Enligt Lantmäteriets planer kommer var 7–8:e punkt av de ursprungliga 50 000 att ajourföras. När
Lantmäteriet väljer vilka punkter som skall ajourhållas kommer de i första hand att prioritera bergfixar och så kallade knutpunkter.
2.4. Modeller för stomnät
Under början av 2000-talet genomfördes projektet TMG (Track Machine Guidance) som var ett UIC-projekt (internationella järnvägsunionen) (Trafikverket, 2014). Syftet var att studera möjligheterna att minska spårunderhållskostnaderna genom att utnyttja satellitpositionering vid maskinstyrning. I projektet genomfördes en nulägesanalys där olika järnvägsförvaltningar beskrev sina metoder och vilka utvecklingsinsatser som pågår. Det man kunde konstatera vara att det var (och fortfarande är) ganska likartade situationer, men att tekniken tillämpas på lite olika sätt. T.ex. tillämpas modellen Pallas hos några järnvägsförvaltningar och det finns någon som till begränsad del tillämpar satellit-positionering. Det är vanligt att man använder sig av fler än en modell.
Slutsatsen i projektet var att det krävs utvecklingsinsatser för att göra tekniken möjlig. En stor del av detta ligger i utveckling på maskinsidan och att det europeiska satellit-navigationssystemet Galileo
kommer i funktionell drift. Intresset för utvecklingsinsatser från de som tillverkar spårunderhålls-maskiner har dessvärre varit svalt.
Tidigare ansåg Lantmäteriet att alla mätuppdrag inklusive stomnät kunde lösas med hjälp av s.k. GNSS-teknik (Global Navigation Satellite System). I Lantmäteriets arbete med revideringen av HMK (Handbok i Mät- och Kartfrågor) påpekas dock att det är självklart att markerade punkter behövs för att kontrollera GNSS-tekniken. Anledningen till detta är att den erhållna noggrannheten inte motsvarar den stora förväntan som man har haft på GNSS-tekniken.
2.5. Nätverks-RTK/projektanpassad Nätverks-RTK
GNSS-tekniken är en teknik som ibland förs fram som en ersättare till traditionell teknik med markerade punkter/referensnät. Detta förslag bygger på att förutsättningar skapas för satellitposi-tionering i ”realtid”. För att tillgodose de behov som föreligger, behöver ett nät av fasta referens-stationer med en täthet (1–2 mil) motsvarande projektanpassad nätverks-RTK upprättas och Galileo vara i drift.
I tunnlar och sträckor där sikten mot satelliterna är begränsad (skärningar och hög skog) behöver ett traditionellt stomnät finnas även i fortsättningen. Det beror på att satellitsignalerna är mycket svaga och inte klarar av att penetrera träd eller tjockare material. I dagsläget uppfyller tekniken dessutom inte kraven på lägesnoggrannhet vid växlar och plattformar eller motsvarande. Förväntningarna är dock att noggrannheten kommer att förbättras med fler satelliter/satellitsystem och förbättrad beräkningsteknik.
När det gäller spårriktningsmaskiner måste sannolikt Trafikverket ta ett stort ansvar för att påverka leverantörerna att anpassa sig till GNSS-tekniken och även tillåta anpassningar av befintliga maskiner. Eftersom Trafikverket inte äger maskinerna måste påverkan/ kravställning på entreprenörerna ske parallellt. Ett rimligt antagande är att det tar minst 5 år för konvertering till denna modell. I projektet TMG konstaterar man att denna teknik skulle kunna ge vinster, men det krävs utveckling som sannolikt tar flera år att genomföra och att det kräver att Galileo är i drift.
Fördelar med metoden är att behovet av underhåll blir mycket begränsat jämfört med det som bedrivs i dag. På sikt skulle maskinstyrning av spårriktare kunna bli en realitet. Det kräver dock att spårrikt-ningsmaskiner kan anpassas till tekniken och att avtalen för underhållsentreprenader anpassas till detta. Det är sannolikt att kostnaden för spårriktning skulle minska, dock har underlag för någon kalkyl av detta inte gått att få fram (Trafikverket 2014).
En nackdel är den höga kostnaden för driften (ca 140 miljoner kr/år). En annan nackdel är att det måste vara två modeller för realisering av referenssystemet, dels en traditionell modell med markerade punkter (där tillgången till satellitsignalerna är begränsad) dels en modell som baseras på nätverks-RTK/projektanpassad-RTK. Detta i sin tur ställer krav på att maskinerna kan nyttja båda modellerna. Om en modell ska väljas som baseras på GNSS-tekniken är det viktigt att vara medveten om de sårbarheter och begränsning som finns med denna teknik. Eftersom GNSS-signalerna är mycket svaga finns det stor risk för signalstörning i tider av ökad solaktivitet (som går i 11-årscykler) eller störningar från andra källor, dvs. sändare som medvetet eller omedvetet sänder signaler i samma frekvensband. Detta skulle innebära att systemet inte kan användas under vissa perioder och förhållanden.
Dessutom, GNSS-tekniken är känslig för så kallade flervägsfel som innebär att signalerna förutom att färdas kortaste vägen mellan satellit och mottagare, studsar i exempelvis glas- och plåtytor innan de når mottagaren. En och samma signal kan alltså färdas flera olika vägar på sin väg till mottagarens antenn, vilket försämrar noggrannheten i den erhållna positionen.
Leverantörer av underhållsmaskiner har visat ett svalt intresse för att utveckla och anpassa sina maskiner så att de är möjliga att nyttja med denna teknik. Införandet av Galileo har skjutits på
framtiden vid flera tillfällen vilket till viss del hämmat utvecklingen eftersom ett driftsatt Galileo är en förutsättning för införandet av denna teknik.
Det går inte att bestämma det absoluta läget, eftersom mätningen alltid sker i förhållande till andra punkter, som redan är kända (Lantmäteriet 2014). För att få entydighet behövs referenssystem som kopplats i ett fast förhållande till jorden, t.ex. höjdsystem, plana koordinatsystem och 3-dimensionella system (i 1D, 2D respektive 3D).
• Referensnät är ett nät av punkter som används för att realisera ett referenssystem. Dessa nät kan vara passiva eller aktiva.
• Passiva referensnät representeras av markerade punkter i terrängen. Sådana nät benämns vanligen stomnät och sättet att bestämma de ingående stompunkterna kallas stommätning. Det finns både stomnät i plan och stomnät i höjd.
Ett exempel på ett aktivt referensnät är SWEPOS, det nationella nätet av fasta referensstationer, som distribuerar korrektioner för realtidsmätning med GNSS i systemet SWEREF 99 (och även till höjdsystemet RH 2000 via en geoidmodell).
I många praktiska mätningssituationer begränsas möjligheten att mäta med RTK. Det kan röra sig om situationer då satellittäckningen är för dålig och/eller då toleranskraven är för höga att RTK-mätning inte lämpar sig. (Trafikverket 2012). Realtidsuppdaterad FRI Station (RUFRIS) är en metod som möjliggör en övergång från GNSS-teknik till traditionell mätningsteknik. Metoden är framförallt användbar i situationer där inga stomnätspunkter finns tillgängliga på marken och där hög relativ noggrannhet eftersträvas.
2.6. Koordinat baserade referenssystem som används inom
Trafikverket
Vilka koordinatbaserade referenssystem som ska användas och vilka krav som gäller för geografisk information inom Trafikverket framgår av dokumentet ”Koordinatbaserade referenssystem” (TDOK 2016:0257). Redovisade system och krav gäller för all användning av koordinatbaserad lägesangivelse inom Trafikverkets verksamhet.
De krav och de referenssystem som anges är bland annat:
• All geografisk kordinatbestämd information kopplad till Trafikverkets anläggning ska vara relaterad till ett gemensamt kordinatbaserat referenssystem i plan (SWEREF 99) samt ett gemensamt referenssystem i höjd (RH 2000).
• Trafikverkets geodetiska stomnät (anslutningsnät) i plan ska etableras endast utifrån de nationella riksnäten i plan tillhörande Lantmäteriets SWEPOS-nät (fasta referensstationer) och/eller RIX 95-nät med SWEREF 99-koordinater.
• Transformationer, inpassningar och överräkningar ska utföras enligt Trafikverkets anvisningar.
• Koordinatbaserat referenssystem i såväl plan som höjd ska finnas realiserade på marken, genom stabila fysiska markeringar i geodetiskt stomnät. Upptäckta skador och brister av stompunkter ska fortlöpande rapporteras till beställare.
• Geodetiska stomnät ska finnas i anslutning till Trafikverkets anläggningar och information om aktuellt stomnät ska inhämtas från beställare i samband med aktuellt projekt.
• När det gäller GNSS-teknik ska den senaste versionen av svensk geodesimodell, upprättad av Lantmäteriet, användas.
För järnvägen dokumenteras gällande stomnät i en stompunktsdatabas som innehåller aktuell
information om gällande stomnät och information om dess ursprung (Trafikverket 2013). I det digitala arkivet IDA förvaras punktbeskrivningar och data från etableringar, bland annat i form av rekogno-seringsrapporter, mät- och beräkningshandlingar. Ur ett underhållsperspektiv är stomnätsfrågan viktig eftersom underhåll av spårgeometrier kräver detta. Även inom verksamhetsområde Investering är, med några få undantag, behovet av stomnät stort. Samtidigt påpekas att de stomnätspunkter som fanns i det gamla systemet är svåra att hitta information om i det nya systemet SWEREF 99 som tillkom 2001.
3.
Spårläge/spårlägeskontroll
3.1. Allmänt
Krav på spårläge och spårlägeskontroll är grundläggande för tågtrafiken med hänsyn till säkerhet, spårkrafter, spårets nedbrytning, passagerarkomfort, etc. och krävs enligt Järnvägslagen (SFS 2004:519). Kraven och reglerna har således stort värde för alla förvaltare, underhållsplanerare,
projektörer och entreprenörer som utför planering, och genomförande av byggnation, spårupprustning, underhåll, tillståndskontroll m. m. av spår och banöverbyggnad men också för de som trafikerar spåren, tågoperatörer och deras kunder, (TDOK 2013:0347). Krav ställs inte direkt på vilket sätt som spårläget ska mätas och verifieras, däremot ställs krav på vilka parametrar som ska mätas, mätningens samplingsavstånd, mätosäkerhet, repeterbarhet och reproducerbarhet samt hur redovisningen av mätresultatet och dokumentation ska ske.
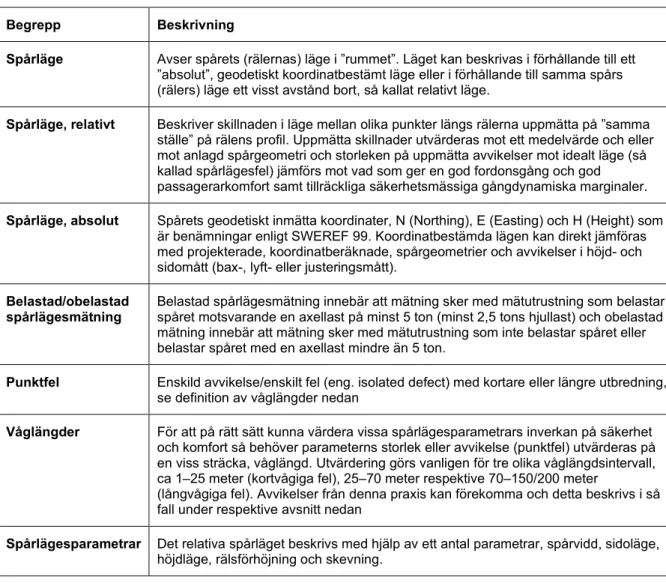
3.1.1. Några definitioner med avseende på spårläge
Nedan följer några definitioner med koppling till spårläge och spårlägeskontroll enligt Trafikverkets dokument TDOK 2013:0347.
Tabell 2. Definitioner kopplade till spårläge. (Källa: TDOK 2013:0347)
Begrepp Beskrivning
Spårläge Avser spårets (rälernas) läge i ”rummet”. Läget kan beskrivas i förhållande till ett ”absolut”, geodetiskt koordinatbestämt läge eller i förhållande till samma spårs (rälers) läge ett visst avstånd bort, så kallat relativt läge.
Spårläge, relativt Beskriver skillnaden i läge mellan olika punkter längs rälerna uppmätta på ”samma ställe” på rälens profil. Uppmätta skillnader utvärderas mot ett medelvärde och eller mot anlagd spårgeometri och storleken på uppmätta avvikelser mot idealt läge (så kallad spårlägesfel) jämförs mot vad som ger en god fordonsgång och god passagerarkomfort samt tillräckliga säkerhetsmässiga gångdynamiska marginaler. Spårläge, absolut Spårets geodetiskt inmätta koordinater, N (Northing), E (Easting) och H (Height) som
är benämningar enligt SWEREF 99. Koordinatbestämda lägen kan direkt jämföras med projekterade, koordinatberäknade, spårgeometrier och avvikelser i höjd- och sidomått (bax-, lyft- eller justeringsmått).
Belastad/obelastad
spårlägesmätning Belastad spårlägesmätning innebär att mätning sker med mätutrustning som belastar spåret motsvarande en axellast på minst 5 ton (minst 2,5 tons hjullast) och obelastad mätning innebär att mätning sker med mätutrustning som inte belastar spåret eller belastar spåret med en axellast mindre än 5 ton.
Punktfel Enskild avvikelse/enskilt fel (eng. isolated defect) med kortare eller längre utbredning, se definition av våglängder nedan
Våglängder För att på rätt sätt kunna värdera vissa spårlägesparametrars inverkan på säkerhet och komfort så behöver parameterns storlek eller avvikelse (punktfel) utvärderas på en viss sträcka, våglängd. Utvärdering görs vanligen för tre olika våglängdsintervall, ca 1–25 meter (kortvågiga fel), 25–70 meter respektive 70–150/200 meter
(långvågiga fel). Avvikelser från denna praxis kan förekomma och detta beskrivs i så fall under respektive avsnitt nedan
Spårlägesparametrar Det relativa spårläget beskrivs med hjälp av ett antal parametrar, spårvidd, sidoläge, höjdläge, rälsförhöjning och skevning.
3.2. Kontroll av spårläget
Kontroll av spårläget utförs för att kontrollera spårets ojämnheter i förhållande till det ideala relativa spårläget. Mindre spårlägesfel kan resultera i komfortstörningar för passagerarna. Ett dåligt spårläge medför dessutom alltid risk för stora spårbelastningar vilket accelererar nedbrytningen av spåret. Större spårlägesfel kan, beroende på storlek och form, i ytterlighetsfall innebära risk för urspårning. Krav på det relativa spårläget är bland annat avhängigt av fordonsdynamiken och påverkar i sin tur vilka krav som ska ställas på stabiliteten i undergrunden. Kraven sätts också med hänsyn till komfort-relaterad praxis samt de tekniskt/ekonomiskt optimala krav som kan ställas på respektive spårläges-parameter kopplade till att kunna mäta och underhålla spåret på ett effektivt sätt. (TDOK 2013:0347). Mätning av spårläget görs för att kontrollera att spåret uppfyller de krav som gäller för aktuell
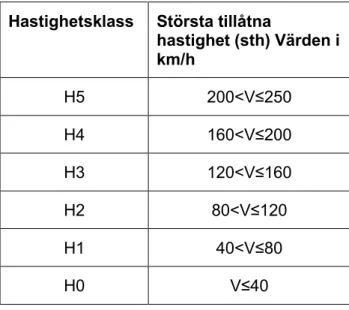
hastighet. Då spårlägeskraven är starkt kopplade till spårkrafter och gångdynamik som i sin tur är direkt kopplade till fordonens hastigheter indelas spårlägeskraven i olika hastighetsklasser. Hastighets-klasserna som gäller för bedömning och redovisning av spårlägesfel och spårlägeskvalitet redovisas i Tabell 3.
Tabell 3. Hastighetsklasser för spårläge. (Källa: TDOK 2013:0347)
Hastighetsklass Största tillåtna
hastighet (sth) Värden i km/h H5 200<V≤250 H4 160<V≤200 H3 120<V≤160 H2 80<V≤120 H1 40<V≤80 H0 V≤40 Spårgeometriska krav
Vid spårupprustningar och mindre ombyggnader, där optimering av hastighet sker på befintlig bana, får minsta och största värden (gränsvärden) enligt (TDOK 2014:0075) utnyttjas. Om gränsvärdena enligt kravdokumentet utnyttjas i större omfattning för aktuell hastighet resulterar detta i lägre komfort för passagerare samt högre underhållskostnader för spår och fordon. Ett onödigt utnyttjande av
gränsvärdena enligt detta kravdokument ska därför undvikas genom att man för varje kombination av spårgeometriska element försöker optimera dessa för högsta möjliga hastighet.
Tillåten hastighet V är en viktig parameter när det gäller dimensionering av den spårgeometriska utformningen. Som minimistandard kan den tillåtna hastigheten sättas lika med den hastighet som det snabbaste tåget kommer att köra med då banan tas i drift eller inom en nära framtid från det banan tagits i drift. På grund av att olika tågkategorier har olika spårgeometriska gränsvärden för
rälsförhöjningsbrist, rampstigningshastighet och rälsförhöjningsbristens ändringshastighet, måste tillåten hastighet V kontrolleras för olika tågkategorier.
I normalfallet ska spårgeometrin dock ha marginaler med avseende på tillåten hastighet. Marginalerna har flera syften – ge en bättre åkkomfort, ge lägre påkänningar på spåret och att möjliggöra framtida
övergångskurva, rälsförhöjningsramp, vertikalkurva, etc.) beräknas därför för en rekommenderad hastighet Vrek som är satt högre än tillåten hastighet V.
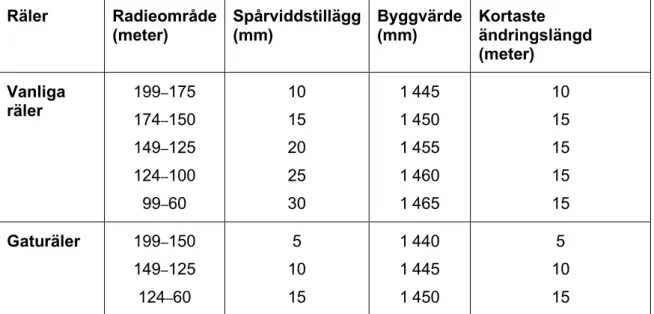
Spårviddens grundvärde är 1 435 mm. Rakspår och horisontalkurvor med R ≥ 200 m ska ha spår-viddens grundvärde. I horisontalkurvor med R < 200 m ska spårvidden vara grundvärdet plus ett spårviddstillägg enligt Tabell 4. Tillägget ska anordnas genom justering av den inre rälen. I över-gången mellan två horisontalkurvor åt olika håll får, om så behövs, yttre rälen flyttas (TDOK 2014:0075).
Tabell 4 Spårviddstillägg vid olika kurvradier (Källa: TDOK 2014:0075)
Räler Radieområde
(meter) Spårviddstillägg(mm) Byggvärde(mm) Kortaste ändringslängd
(meter) Vanliga räler 199174––175150 149–125 124–100 99–60 10 15 20 25 30 1445 1450 1455 1460 1465 10 15 15 15 15 Gaturäler 199–150 149–125 124–60 5 10 15 1440 1445 1450 5 10 15
Mätning av spårläget genomförs regelbundet enligt TDOK 2014:0240. Hur ofta beror på vilken besiktningsklass den aktuella anläggningsdelen tillhör. Valet av besiktningsklass utgår från en kombination av trafikbelastning (miljoner bruttoton/spår och år) och sth (km/h) för tågkategori A. Besiktningsklasser och dess indelning kan illustreras med hjälp av Figur 4.
Figur 4. Indelning av besiktningsklasser utifrån trafikbelastning och sth (största tillåtna hastighet). (Källa: TDOK 2014:0240).
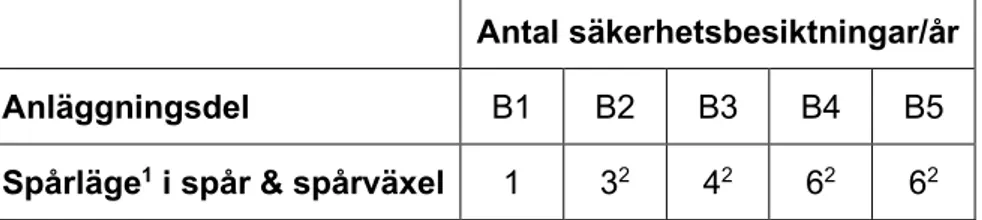
I Tabell 5 nedan redovisas antalet spårlägeskontroller som ska genomföras för spårläge i spår och
spårväxel utifrån det aktuella spårets eller spårväxelns besiktningsklass.
Tabell 5. Antalet besiktningstillfällen per år för spårläge i spår och spårväxlar med hänsyn till besiktningsklass. (Källa: TDOK 2014:0240).
Antal säkerhetsbesiktningar/år
Anläggningsdel B1 B2 B3 B4 B5
Spårläge1 i spår & spårväxel 1 32 42 62 62
1) Gäller huvudspår. För sidospår ska spårlägeskontroll utföras efter behov.
2) För sidotågvägar och förbindelsespår mellan två spår (enkel- eller kryssförbindelse) ska spårläget kontrolleras två gånger per år.
Mätningarna utnyttjas för att planera kommande spårriktningsinsatser. Spårlägesmätningar görs även i direkt anslutning till större spårarbeten såsom ny- och ombyggnad av spår, växelbyten med flera arbeten där spårläget kan rubbas, se exempelvis TDOK 2014:0520, ”Tillåtna hastigheter efter stabilitetspåverkande arbeten”. Kontroll av spårläget kan ske med olika metoder, som exempelvis:
Spårlägeskontroll med mätfordon
Används för att mäta det relativa spårläget. Spårläget mäts under belastning och mätresultatet registreras kontinuerligt samt jämförs med gällande gränsvärden. Utvärdering av kritiska fel och urspårningsfarliga fel görs direkt i mätfordonet och rapporteras vidare.
Spårlägeskontroll med manuella utrustningar
Detta kan exempelvis göras med SOLA-pass eller annan lättviktsutrustning. Avser det relativa
spårläget och mäts i obelastat spår. Metoden används till exempel på arbetsplats och efter vissa arbeten om inte mätfordon finns tillgängligt.
Kontroll av spårets absoluta läge med geodetisk mätutrustning
Absolut spårlägeskontroll görs för att kontrollera spårets avvikelse från projekterad koordinatberäknad spårgeometri. Används i spår vars läge kan befästas geodetiskt mot stomnät/polygonpunkter. Avsett projekterat läge kan alltid återställas och rälsspänningarna kan hållas under kontroll. Även långvågiga spårlägesfel kan åtgärdas med denna metodik.
Övrig spårlägesutvärdering görs som efterbehandling i analysverktyget Optram. I detta verktyg kan periodiska mätningar på spår och kontaktledning analyseras. Följande typer av mätningar kan
studeras: spårläge, räfflor och vågor, ballastprofil, rälsprofil samt kontaktledning. Systemet används av förvaltare och entreprenörer för att analysera anläggningsinformation och resultaten används för att planera ett optimalt underhåll. I Optram finns möjligheter att beräkna olika typer av nyckeltal samt se trender och göra prognoser. Entreprenören ska genomföra en analys i Optram baserad på resultatet från genomförda spårlägesmätningar och utifrån denna analys presentera en plan för beställaren (Trafikverket) på vilka spåravsnitt som ska spårriktas.
3.3. Spårets absoluta läge
Spårets absoluta läge bestäms normalt i samband med ny- eller ombyggnader samt spår- och växelbyten. Läget mäts i koordinaterna N, E och H enligt aktuella referenssystem. Inmätning utförs enligt TDOK 2014:0571 och TDOK 2014:0572 (Geodetiska mätningsarbeten och geografisk lägesbestämning). Därefter förvaltas (TDOK 2016:0407) det projekterade koordinatbestämda läget
och geometrierna, bland annat för att senare kunna utföra vissa underhållsarbeten. Genom att kontrollera och vid behov återställa spårets projekterade absoluta läge kan man:
• Åtgärda långvågiga spårlägesfel. • Återställa spårets neutraliserade läge.
• Återställa spårets läge och säkerhetsavstånd i förhållande till intilliggande objekt som plattformar, bropelare, tunnel och bergsskärningar m.m. (FOMUL-koordinater återställs). • Ofta är återställande av projekterade lägen också det enda sättet att få flera spårs geometrier att
passa ihop på rätt sätt när de är sammanfogade i komplexa växelförbindelser. Undantag kan vara enkla raka spårväxlar i parallella spår.
Spårets absoluta läge mäts med lämplig godkänt mätutrustning, t.ex. totalstation eller avvägnings-instrument. Inmätt läge hos spåret/rälen ”kopplar” till ett geodetiskt referenssystem vilket möjliggör att mätpunkten kan koordinatbestämmas i N, E och H med viss noggrannhet. Spårets anlagda/önskade geometri kan därmed anläggas.
Data för den projekterade spårgeometrin ska dokumenteras och lagras i GAD som ingår i förvaltnings-data (TDOK 2013:0664). GAD (geografisk anläggningsförvaltnings-databas) är Trafikverkets system för lagring av modellfilsdata och spårgeometrier baserat på geografiska koordinater. Informationen i GAD ska uppdateras i samband med åtgärder som påverkar spårgeometrin (ny eller ändrad geometri) och vid utbyte av spårkomponenter och eller inläggning av nya komponenter. Motsvarande uppdatering ska även göras i baninformationssystemet BIS.
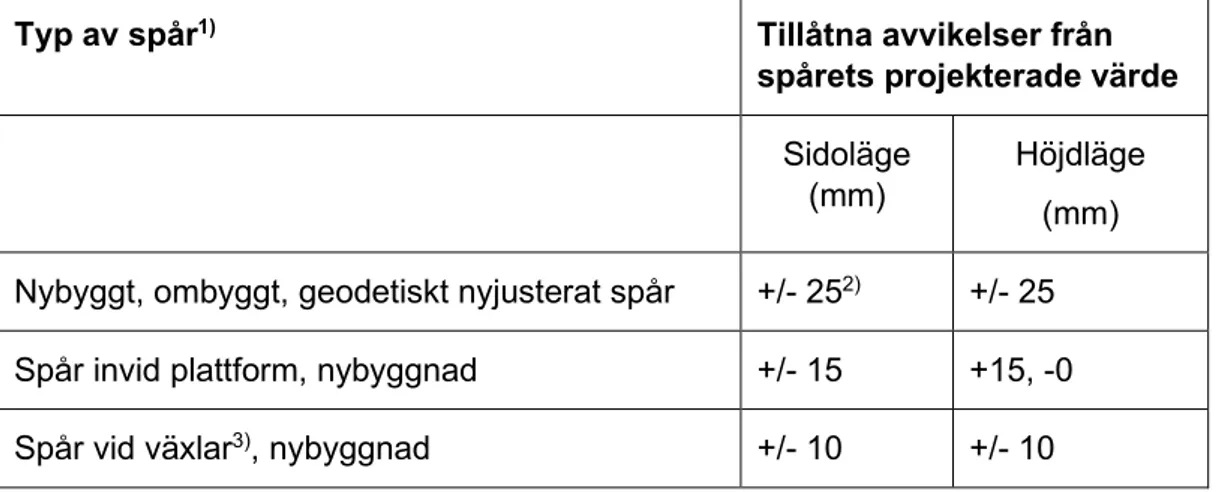
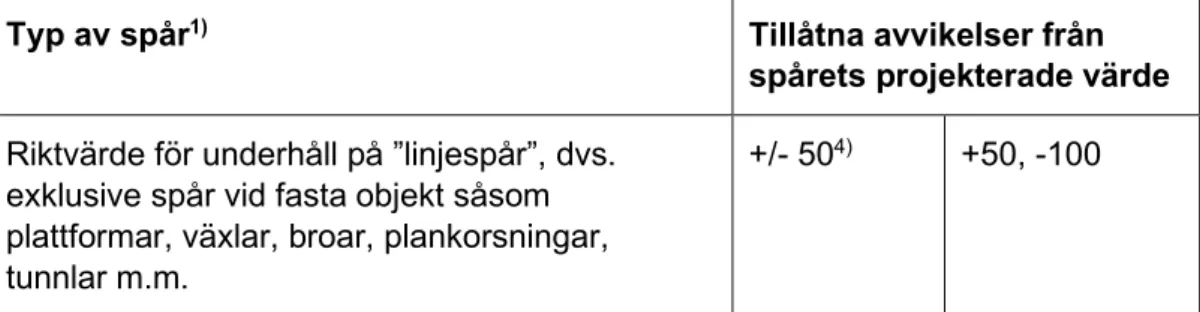
Vid byggnation, spårförnyelse och större förebyggande underhållsinsatser (TDOK 2013:0664) ska spåret läggas inom toleranser för spårets absoluta läge enligt Tabell 6, (TDOK 2014:0075) som är normalvärden. I anslutning till fasta punkter såsom broar, tunnlar, plattformar, med mera måste avvikelserna hållas inom snävare gränser och därför successivt spetsas ut mot dessa. Utspetsningen mot det fixerade avsnittet ska utföras så att gränsvärden för relativa spårläget registrerat med mätfordon innehålls.
Toleranser på spårets höjd och sidoläge ska uppfylla både det relativa spårläget registrerat med mätfordon och den absoluta positionen gentemot projekterat läge. I samband med nyanläggning, upprustning och i annat fall geodetisk justering av spårläget gäller toleranskrav för spårets absoluta läge i plan och höjd
Tabell 6. Tillåtna avvikelser från spårets projekterade värde. (Källa: TDOK 2014:0075 och TDOK 2013:0664).
Typ av spår1) Tillåtna avvikelser från
spårets projekterade värde
Sidoläge
(mm) Höjdläge(mm) Nybyggt, ombyggt, geodetiskt nyjusterat spår +/- 252) +/- 25
Spår invid plattform, nybyggnad +/- 15 +15, -0
Typ av spår1) Tillåtna avvikelser från
spårets projekterade värde
Riktvärde för underhåll på ”linjespår”, dvs. exklusive spår vid fasta objekt såsom plattformar, växlar, broar, plankorsningar, tunnlar m.m.
+/- 504) +50, -100
1) Värdena gäller för ballastspår. För ballastfria spår är de tillåtna avvikelserna beroende av lösning och bestäms från fall till fall.
2) I kurva med R < 600 meter begränsas tillåten sidoavvikelse till +/- R/24 mm (R i meter) med hänsyn till den spänningsfria temperaturen.
3) Vid växelförbindelser gäller även att spåravståndet och höjdavvikelsen mellan spåren inte får avvika mer än +/- 10 mm från de projekterade lägena.
4) Enligt TDOK 2013:0064 gäller att i kurva med R<600 meter begränsas tillåten sidoavvikelse till +/- R/12 mm /R i meter) med hänsyn till den spänningsfria temperaturen.
Vid underhåll ska spåret på lämpligt sätt kunna återställas till sitt projekterade läge. På så sätt återställs rätt spårgeometri, rätt position för tangentpunkter, rätt fritt utrymme och säkerhetsutrymme, rätt rälsmängd, rätt spänningsfri temperatur, etc. Kraven på det relativa spårläget ska dock alltid vara uppfyllda.
Krav på mätosäkerhet för absolut spårläge framgår av Tabell 7.
Tabell 7 Mätosäkerhet för absolut spårläge. (Källa: TDOK 2013:0347)
Mätosäkerheten för absolut spårläge (i mm), anges med 95 % konfidensintervall
Mätningssätt Sidoläge (plan) Höjdläge
Spår och växlar, kontroll från samma station som
ursprungsmätningen +/- 10 +/- 101
Spår och växlar, kontroll från annan station än
ursprungsmätningen, gäller även omlottmätning +/- 13 +/- 132
1) Större osäkerhetstolerans, +/- 20 mm, i höjd gäller spår utan samverkan med annan fast spåranläggning, såsom plattform, växel, fast bro etc.
2) Större osäkerhetstolerans, +/- 26 mm, i höjd gäller spår utan samverkan med annan fast spåranläggning, såsom plattform, växel, fast bro etc.
3.4. Geodetisk mätning
Trafikverkets krav beträffande geodetiska mätningsarbeten och teknisk kompetens beskrivs i TDOK 2014:0571. Krav som berör framställning av produkter inom områdena fotogrammetri, laserskanning, kartor, mark- och bergmodeller finns också beskrivet. Krav på mätningssätt bestäms utifrån ändamålet med mätningen och vilka parametrar som behöver mätas, etc. och fastställs i varje särskilt fall med hänsyn till gällande regelverk och infrastrukturförvaltarens, projektets (eller motsvarande) beställning, (TDOK 2013:0347). Nedan följer några begrepp relaterade till geodetisk mätning:
Absolut spårläge
Avser spårets läge i plan och höjd med referens till bruksnäten i plan och höjd. Toleranser vid mätning avser mätosäkerhet definierad vid 95% konfidensnivå (K2).
Geoidmodell
En geoidmodell (eller ett geoidhöjdsystem) är en modell som kan användas för att omvandla uppmätta höjder över ellipsoiden h till höjd över havet H, t.ex. SWEN08_RH2000.
GEOSP
Ett hjälpmedel i form av ett geodetiskt spårviddsmått som kan användas vid geodetisk mätning av spårmitt i plan och höjd.
Nät, fackverksstruktur
Varje triangels sida ska vara gemensam med sida för intilliggande triangel.
Nät, tågformad struktur
Ett antal punkter sammanbundna med räta linjer i de ordning de följer på varandra.
Geometrier
Koordinattransformation av anläggningsgeometrier eller konstruktioner får inte utföras med metod som innebär skaländring.
Kontroll av befintliga stomnät
Befintliga stomnät i plan och höjd samt stompunkter som ska användas för detaljmätning ska kontrolleras och kontrollen ska dokumenteras.
Referenser för RTK-mätning
Den satellittekniska utrustningen för geodetisk mätning och maskinstyrning/guidning som ska ta emot signaler från såväl GPS- som GLONASS-satelliter.
Utsättning
Utsättning ska utföras utgående från etablerade stomnät och geodetiskt referenssystem enligt TDOK 2016:0257.
Geodetisk inmätning
Inmätning av spårmitt ska utföras på referensräl med spårmätutrustning innehållande centreringskravet +/- 2 mm. Mätning av rälsförhöjning ska utföras i samma sektion som inmätning av spårmitt på referensräl görs.
Referensräl
Är den räl som mätning ska referera till. Mätning i plan ska ske i spårmitt och relatera till vänster räl i längdmätningsriktningen på rakspår och i högerkurva. I vänsterkurva är höger räl referensräl för planläge, se Figur 5, där: 1= Spårplan/farbaneplan 2= spårmitt (1435mm/2 från referensräl) 3= Mittlinje farbana Yp=1435 mm/2 från referensräl Zp= 14 mm.
Figur 5. Aktuella mått vid mätning utifrån referensräl. (Källa: TDOK 2013:0347)
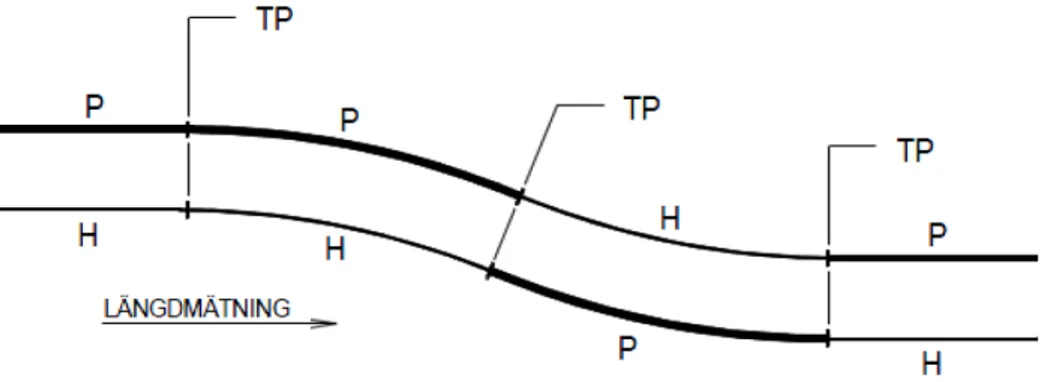
Mätning i höjd av spåret ska ske på höger räl i längdmätningens riktning på rakspår och i högerkurva. I vänsterkurva ska mätning ske på vänster räl, Figur 6, där:
P = referensräl i plan H = referensräl i höjd
T = tangeringspunkt där referensräl kan bytas
Byte av referensräl kan ske in på sträckan (strax efter TP) om inte kurva följd på kurva sker.
Figur 6. Referensräler (Källa: TDOK 2014:0571).
3.5. Krav på spårläge, toleranser
Infrastrukturförvaltaren har ansvaret för att fastställa lämpliga värden för planeringsgräns, underhålls-gräns och underhålls-gräns för omedelbar åtgärd för ett flertal parametrar (TDOK 2013:0347). Vid fastställandet av dessa värden ska hänsyn tas till de gränser för spårlägeskvalitet som används som underlag för godkännande av fordon. Trafikverket har dessutom krav på långvågiga spårlägesfel i höjd- och sidled, rälsförhöjningens ojämnhet samt standardavvikelsen för samverkande fel. För Trafikverkets spår ska åtgärdsnivåer och benämningar enligt Tabell 8 gälla för respektive spårlägesparameter.
Tabell 8. Åtgärdsnivåer. (Källa: TDOK 2013:0347)
För-kortning Benämning Förklaring/krav på åtgärd
NYTT Nytt Kravnivå för nybyggt och nyupprustat spår NYJUST Nyjustera
t Kravnivå för nyjusterat spår efter spårriktningsinsats
PLAN Planering Kravnivå, planeringsgränsvärde. Spårlägesfel som överskrider gränsen ska börja analyseras för planering av kommande insatser.
UH1 Underhåll
1 Kravnivå, underhållsgräns 1. Spårlägesfel som överskrider gränsen ska snarast åtgärdas så att nästa nivå, underhållsgräns 2, med marginal inte hinner nås före nästa spårjusteringsomgång.
UH2 Underhåll
2 Kravnivå, underhållsgräns 2. Spårlägesfel ska åtgärdas innan de nått denna nivå. För spårlägesfel som överskrider UH2, dvs. ligger mellan gränsvärdena UH2 och KRIT, ska omedelbar planering av åtgärd ske och genomförande av åtgärd ske utan onödigt dröjsmål.
KRIT Kritisk Kravnivå, gräns för omedelbar åtgärd. Vid uppmätta fel som överskrider kritisk gräns ska åtgärder omedelbart vidtas för att minska risken för säkerhetskonsekvens. Detta kan ske genom att felet åtgärdas, att det införs hastighetsned-sättning eller stopp för trafiken. Beroende på parameter ska anvisningar i kapitel 13 - ”Åtgärder vid fel som överskrider kritisk gräns” följas.
I Tabell 9 finns en sammanställning av rekommendationer, kopplade till spårunderhållet, på hur de olika måtten på spårläge och spårlägeskvalitet bör användas. Underlaget används dessutom också för övergripande analyser om samverkan fordon-spår, kravställningar, godkännande av fordon med mera. Tabell 9. Rekommendationer för användning av spårlägesmått. (Källa: TDOK 2013:0347)
Tillämpning Förekomst av antal punktfel (PLAN, UH1, UH2,…) Sträckan sämsta värde för standard-avvikelser eller QS Sträckan medelvärde för standard-avvikelser eller QS Fördelningsfunktion: andel av spåret som är sämre än givna värden på standard-avvikelser eller QS Bedömning av underhållsbehov på mycket övergripande nivå såsom jämförelser mellan olika stråk eller bandelar. Mycket information sammanfattas i få variabler + - - + ++
Tillämpning Förekomst av antal punktfel (PLAN, UH1, UH2,…) Sträckan sämsta värde för standard-avvikelser eller QS Sträckan medelvärde för standard-avvikelser eller QS Fördelningsfunktion: andel av spåret som är sämre än givna värden på standard-avvikelser eller QS Bedömning av underhållsbehov på detaljnivå (val av åtgärder och sträckor) ++ - - -Godkännande av underhållsarbete med påverkan på spårläge, till exempel spårbyte eller spårriktning ++ ++ + -Värdering av spårläge på övergripande nivå (hel bandel eller stråk)
+ - - - ++
Symbolerna ”++ / + / - / - -” anger om måttet är lämpligt eller olämpligt för tillämpningen.
Spårlägesfel kan i vissa fall vara av sådan karaktär att de bedöms vara urspårningsfarliga spårlägesfel (TDOK 2013:0658). Denna typ av fel utgörs av skevnings-och spårviddsfel (uppmätt med mätfordon) som överskrider gräns för omedelbar åtgärd, dvs. KRIT-gräns. Åtgärder ska omedelbart vidtas då uppmätta fel som överskrider KRIT-gräns har påträffats. Antigen kan felet åtgärdas eller hastighets-nedsättning införas, alternativt trafikstopp.
Felet måste åtgärdas även om felet inte återfinns precis vid den angivna positionen eller felets storlek inte kan påvisas med manuell eller obelastad spårlägesmätning. Uppmätta värden från manuell obelastad mätning, t.ex. med SOLA-pass, får aldrig användas till att avskriva uppmätta värden från maskinellt belastad mätning. Det kan ibland vara svårt att hitta spårlägesfel på grund av följande:
• Angiven position i anmälan avviker mot felets läge i spår: lägesinformationen finns i anmälan från mätentreprenören och erhålls från drifttekniker. På grund av toleranser i mätsystemet och mätning i hög fart kan felet behöva sökas upp till 30 meter före och efter angiven position (+/- 20 meter för GPS-position och +/- 30 meter för angiven Km+m längdmätning).
• Fjädrande spårmateriel gör att felet eller storleken på felet är svår att hitta: På grund av att spårmateriel uppträder elastiskt under belastning från mätfordon och tåget så kan både skevningsfel och spårviddsfel vara svåra att återfinna när spåret är obelastat.
Tabell 10. Gränsvärde för skevningens punktfel med mätbas 3 respektive 6 meter samt spårviddsfel Max, punktfel. (Källa: TDOK 2013:0658).
Skevningens punktfel med mätbas 3 m – uppmätt skevning (värde i mm)
Skevningens punktfel med mätbas 6 m – uppmätt skevning (värde i mm)
Spårviddsfel Max, punktfel – uppmätt spårvidd (värde i mm) Hastighetsklass Nedsättning till 40 km/h 1) Kalla ut felavhjälpare Trafikstopp Kalla ut felavhjälpare Nedsättning till 40 km/h 1) Kalla ut felavhjälpare Trafikstopp Kalla ut felavhjälpare Nedsättning till 40 km/h 1) Kalla ut felavhjälpare Trafikstopp Kalla ut felavhjälpare H5 12 <värde ≤
15 15 <värde 20 <värde ≤ 23 23 <värde 1463 <värde ≤ 1468 1468 <värde H4 – H3 15 <värde ≤
18 18 <värde 25 <värde ≤ 28 28 <värde 1468 <värde ≤ 1470 1470 <värde H2 – H0 18 <värde ≤
21 21 <värde 29 <värde ≤ 32 32 <värde 1470 <värde ≤ 1472 1472 <värde 1) För hastighetsklass H0 är sth 40 km/h varför ingen nedsättning behöver göras, däremot ska felavhjälpare kallas ut. I kravdokumentet TDOK 2014:0571 redovisas krav och toleranser som gäller vid upphandling av geodetiskt mätningsarbete. Toleranserna som redovisas i dokumentet används vid
inmätning/kontrollmätning av anläggningsobjekt som underlag för: • projektering (projekteringsunderlag, bland annat systemhandling) • arbetsplan för järnväg respektive väg (plankarta)
• bygghandling (Plan- och projekteringskarta) • underlag för relationshandlingar (Byggentreprenad) • krav på färdig anläggning.
Vid inmätning med RTK-teknik ska denna metodik vara verifierad från minst två kända punkter i aktuellt områdes närhet vid dels start av mätning dels vid avslutande mätning. Kontrollen ska
dokumenteras och kontrollen ska avse både plan- och höjd. Vid kontrollinmätning av detalj ska värden enligt Tabell 11användas.
Tabell 11. Övergripande toleranskrav vid kontrollinmätning av de detaljobjekt som redovisas i Tabell 12. (Källa: TDOK 2014:0571, bilaga A).
Typ av mätning Tolerans
Från samma station som inmätning Angiven tolerans Från annan station än vid inmätning Angiven tolerans x 1,3
Bestämning av avstånd eller höjdskillnad mellan två objekt Angiven tolerans x 1,5 (lägsta värde)
Tabell 12 är ett utdrag från TDOK 2014:0571, Bilaga A och redovisar några detaljobjekt kopplade till järnvägssystemet. Toleranser anger maximalt värde i plan eller höjd vid kontrollmätning av objekt.
Tabell 12. Toleranser av kontrollmätningar för några utvalda detaljmätningsobjekt. Tolerans anger maximalt värde i plan (radiellt) och höjd. Kravet avser från stationsuppställning till aktuellt
detaljobjekt. (Källa: TDOK 2014:0571, Bilaga A)
Detalj/objekt
Toleranser Markering med X avser objekt ska ingå i resp. karta
Anmärkning Plan radiellt
(mm) (mm) Höjd Underlag plankarta projektering Underlag
Objekt i järnvägsområde
Absolut spårläge ⊥ 10 X X
I samband med fast anläggning t.ex.
plattform, växel, fast bro. Spec. krav enligt TDOK 2014:0075, kap 12. Växel Fsk, Bks,
tungspets 10 10 X
Plattform, lastkaj 10 10 X X
Kontaktledningsstolpe 15 30 X Höjd på planläget ska anges
Centrum slipers, kant 20 20 X
Kabelränna 15 30 X X
Skåp 30 30 X
Kilometertavla 50 (50) X
Ballast krön 30 30 X X
Ballast fot 30 30 X X
Berg- och jordslänt
krön 50 50 X X
Berg- och jordslänt fot 50 50 X X
Järnvägsbank krön 50 50 X X