AX.
M
rai h Iremnstitute p *
3 ad TC wa? ir led fiki iese CI t -# ¥ m 0 . C 2 + 3 me a & 034 j f I"-L A t e m th es a a A &. s 5 spl S g t 2 8 a i i 45%
Stutens véig- och tra kinstitut (VTI) 0 581 01 Linkoping Nr 335A ' 1983
Swedish Road 8: Traffic Research Institute 0 S-581 01 Linkoping ' Sweden
ISSN 0347-6049
Indo Swedish Road Traf c Simulation
Research Project
3
State of the art and proposals for its completion
3 5 A
by Gosta Gynnerstedt
3.I 3.2 4.1 4.2 4.3 CONTENTS ABSTRACT SUMMARY
THE INPUT MODELS AND THE INPUT/OUTPUT PROGRAMS
TRAFFIC BEHAVIOUR MODELS/PROGRAMS The free flow traffic model
The traffic interaction model - two-lane road traffic
The traffic interaction model single-lane road traffic
FIELD STUDIES
Additional field studies for submodel calibration Additional field studies for validation of the traffic behaviour models
IMPLEMENTATION OF THE SIMULATION TECHNIQUE
Program implementation Model implementation
Administrative implementation
DOCUMENTATION OF THE PROJECT PLANNING OF ACTIVITIES IN I983 FINANCING OF THE PROJECT APPENDICES
VTI MEDDELANDE 335A
II IO IO IO IZ IS 19
Indo-Swedish Road Traffic Simulation Research Project
State of the art and proposals for the completion of the project by G'osta Gynnerstedt
Swedish Road and Traffic Research Institute (VTI)
5-581 01 Linkoping Sweden
ABSTRACT
This paper is summarizing the status of and plans for an ongoing re-search project in cooperation between Indian and Swedish institutions in order to develop a road-traffic simulation program system for Indian purposes. This will be done by expanding and modifying a bi-directional two-lane road traffic simulation program system developed
at the Swedish Road and Traffic Research Institute in Sweden (VTI).
The project is adjoined to a comprehensive Road User Cost Study in India, for which CRRI in New Delhi is responsible. Furthermore, the Indian Institute of Technology in Kanpur is involved in the project and the Australian Road Research Board has furnished equipment for the
field studies.
The status of the project is summarized in the paper. Different activi-ties to complete the project, its implementation and documentation are discussed. An activity/time frame is proposed. The presentation of the project to the Ministry of Transport is enclosed in appendices.
II
Indo-Swedish Road Traffic Simulation Research Project State of the art and proposals for its completion
by Costa Gynnerstedt
Swedish Road and Traffic Research Institute
5-581 Oi Linkoping Sweden
SUMMARY
The aim of this joint Indo-Swedish research project is to introduce simulation technique for estimating road traffic characteristics relevant
to road user cost and for designing a road traffic policy in general. This
will be done by expanding and modifying a bidirectional two lane road traffic simulation model developed at the National Road Traffic Re-search Institute in Sweden (VTI). This means adopting the philosophy of model construction and the technique of structuring the program with JSP, in addition to using the Simula language. The expansion of this model means primarily the inclusion of single lane bidirectional traffic behaviour where crossings of vehicles in opposite directions have a predominant influence on the traffic behaviour. The modification con cerns mainly the Indian mixed traffic conditions with a high percentage of slow moving traffic tractors and animal drawn vehicles as well as bicycles and rickshaws.
The Central Road Research Institute in New Delhi (CRRI) has recently
reported on the development of this project adjoint to a comprehensive Road User Cost Study in quarterly reports and the project has also been documented in reports from the VTI.
During the past two years considerable progress has been made. This means that my earlier confidence in the possibility of also bringing Indian mixed traffic conditions into usable simulation programs in the manner recommended by the VTI has been fulfilled. Convincing results were reported at a meeting with the Ministry of Transport in December l982. The minutes of this meeting and the results are attached in appendices (1,2). In consequence of this the Ministry of Transport as user of the technique is now requesting that the research project including its implementations should be carried through. The Ministry of Transport was also inclined to finance a further development of the models after VTI MEDDELANDE 335 A
III
this project had been completed and asked for proposals for further
extensions.
The different activities in this project already defined inthe earlier reports to be completed are mainly:
- Calibration of submodels and validation of the system models for
two-lane traffic and for single lane traffic, the modelling and
programming of which are completed.
- Field studies furnished by the CRRI for further calibration of the submodels in the model system and validation of the system models - Implementation of the technique
- Documentation of the project
Another year is required to complete the project. The fact that the project was delayed one year at the beginning, that its originally planned time frame of three years was reduced and that its budget was cut accordingly should be takeninto account.
Bringing the project to a successful completion in 1983 requires the fulfilment of a number of important requests.
CRRI must retain enough resources from the RUCS staff for the
field studies asked for. As this project was completed in the middle of 1982 the organisers of the project as well as the members of the staff will return to other tasks
- The financing of the VTI participation by the SIDA must be handled
without delay by the Indian authorities; very close cooperation being
necessary to profit from experience obtained in research work and for documentation.
The demand for the additional budget was presented in April 1982.
I. THE INPUT MODELS AND THE INPUT/OUTPUT PROGRAMS
The user will first come into contact with the input and output of the models. It is therefore essential to facilitate and simplify the manage-ment of these two parts of the system with the aid of dialogue input and output programs and manuals for its use in order to make the technique easily available.
The input models/programs consist of - a model for defining the road
- a model for vehicle/traffic generation
By modifying and expanding dialogue programs for constituting a road description recently developed at the the VTI for two-lane road the program will cover all types of road widths in India.
In this context it is essential to point out that one should be able to perform simulation runs of road stretches constituted of a mixture of substretches of single, intermediate and two-lane road widths. Besides requests of unified road descriptions, the same identification of the vehicle types taken into account in the simulation, is required.
A specification of relevant vehicle types and their identification is therefore necessary as part of the definition of the interface between the input models and the two traffic behaviour models. This demand is particularly important as the single lane traffic behaviour model and the two-lane traffic behaviour model are developed separately.
2. TRAFFIC BEHAVIOUR MODELS/PROGRAMS
To be able to satisfy a repeated request of considering traffic behaviour
along a road stretch of different road widths in the same simulation run, certain conditions are indispensable also in the traffic behaviour
models/programs.
l. The interfaces between input models/programs and the behaviour models/programs must be fully adapted.
2. The free flow traffic model should be identical for single and two-lane traffic.
2.l Free flow traffic model
In the free flow traffic model the basic desired speed allotted to each individual equipage is reduced with regard to the road conditions and
general speed limits in force. In a first set of submodels, reductions are
made for road width, horizontal curvature and general speed limits. Basic desired speed
The basic desired speed is in principle an intrinsic speed distribution, but can be approximately determined as a journey speed at low flows on
straight horizontal stretches of road of suitable length with good shoulders and in good surface condition. It is also proposed to measure
the speeds on good one-way, two-lane roads at low flow and no disturbing environment, is presupposed.
Due to the Indian conditions the basic desired speed distribution has been divided into two separate distributions one for cars and another for trucks and buses so as to facilitate calibration. Slow moving ADVs
constituting only a. disturbance of the motor traffic are recommended to
be given the same low speed to avoid irrelevant overtakings between ADVs
Road width
The submodel for reduction of the basic desired speed due to the road width must be consistent from 7 m paved road to 3.5 m to fulfil the
request concerning mixed road widths mentioned above. VTI MEDDELANDE 335A
Horizontal curvature
In the VTI model the radii explain sufficiently well the reduction of speeds in bends. This assumption has reduced the information necessary
for simulation of free flow traffic. However, the regression model
presented by the RUCS indicates that the sight distance in bends is not insignificant. This influence should be carefully tested as an introduction if sight distance in the free flow traffic model is also to increase the need for information for free flow simulation runs. A further investiga-tion of the field data in this respect should also take the following into account: The use of R'1 as variable instead of R gives a defined interval (03Rmin) X R-l
defined as the speed m a straight road compare the basic desired speed :0 means a straight road and the constant term is
concept.
"Village" speed
In the VTI model a speed limit reduction is introduced. As there are no general speed limits in the Indian rural road network this submodel is proposed in order to reduce speeds where the road passes smaller villages and the drivers lower speeds in case of bicycles and pedestrians.
Road roughness
A further speed reduction must be introduced due to rough surfaces. This
reduction may be introduced before the road width reduction or after the speed limit reduction has been performed.
Vertical alignment
The adaption of the speed to the vertical alignment uphill to be very good reflected by the model according to the first results demonstrated on the two-lane SIMLA-KALKA road. Downhill an adjustment has been introduced to reduce the speed of heavy vehicles which proved very successful for this road but must be generalised and validated. This modification should be introduced identically in the single lane model.
2.2 The traffic interaction model - two-lane road
In the VTI model the equipages in the two opposite traffic streams on the two-lane road do not generally interact but move independently. One important exception from this rule, however, occurs when considering an overtaking. In this situation the decision of the presumptive overtaker is influenced by the distance to the vehicles in the opposite traffic stream.
If there is no vehicle within the sight distance, the length of the sight
distance influences the decision to overtake. This is in accordance with the general rule that only events relevant to the traffic process should
be taken into account. This condition is essential to give reasonable computer time for simulation of sufficiently long bad stretches at high
traffic flows. It is assumed that this method of describing traffic behaviour also holds for Indian two lane roads, but some investigation is to be performed to prove the hypothesis.
The first comparisons between simulated and real traffic are very promising both on a road in flat terrain and on one in hilly terrain. "This indicates that excellent work has been done and that the submodels as well as the system models are already well adapted". The results are presented in the appendices. On.the other hand it must not conceal the fact, however, that further calibration and validation are required. Above all, these introductory comparisons demonstrated that the number
of overtakings performed-by trucks is dominating. It is therefore of the
utmost importance that overtaking studies be expanded to a truck or bus
as experimental vehicle. This study will be commented on below.
2.3 The traffic interaction model - single lane road traffic
In the extension of the traffic interaction model to cover single lane
bidirectional road traffic simplification of the two lane traffic model is of course not justified as the crossing interactions between equipages in the two opposite traffic streams constitute an essential influence on the traffic process. As the number of crossings increases rapidly with the
traffic flow, the computer simulation program necessary will give
correspondingly longer simulation times. On the other hand the demand
for simulation of single lane road traffic is certainly not concerned with
high traffic flows. The simulation program is well debugged but further
effort has to be devoted to the program's efficiency.
Knowledge of traffic behaviour on single lane roads has so far been
rudimentary, which has impeded development. This model development therefore has demanded a variety of field studies. The investigation thus is very informative and considerable progress has been attained. A thorough calibration of the crossing and overtaking procedures, which requires further field studies, is needed and will be commented on in section 3 as well as further calibration and validation of the whole traffic behaviour model are requested.
3. FIELD STUDIES
In connection with model construction empirical knowledge is necessary
for modelling, calibration of submodels and validation of the system
model. In the previous chapters it has been indicated that further field studies are necessary. As the CRRI received the last additional equip-ment from ARRB in November l982, the Institute is now able to perform
all the field studies desired.
3.l Additional field studies for submodel calibration Calibration of free flow traffic submodels
For the approximation of basic desired speed straight horizontal road stretches should be chosen as parts of longer straight roads so that the traffic speed can be regarded as being in a steady state, not disturbed by changes in road widths or in road alignment.
The paved road surface, as well as the shoulder, should be in good condition and there must be no hindrance of the traffic speed by junctions, meter sections or by other influences in the environment. Traffic is observed at l0w flows so that interactions between vehicles can be neglected. The length of the road stretch will not be longer than a length permitting the vehicles to be observed along the whole stretch
-but long enough not to allow dominant influence from the inaccuracy in
the passing time observation. Road stretches of a length of about 500 m are recommended but this is due to the observation technique. The measurements are recommmended to be collected for a road width of 7 m. It is also recommended that speed distributions for the different types of vehicles be given separately. As is mentioned in the previous
section (2.1) two lane one-way stretChes meeting the conditions above
can also be chosen for the purpose.
Road width
By extending the study described above for road widths of 5.5 and 3.5 m calibration of the influence of road width upon speed can be completed.
Road bends
Ideally these studies should be followed up by registering speed
reduc-tions due to bends. These stretches should fulfil the requirements except for the horizontal curve. There is no doubt that this type of data has been collected within the scope of RUCS but some additional studies
may prove necessary.
It is essential that journey speed measurements are performed downhill on a variety of hilly roads to calibrate the downhill speed of vehicles -with emphasize of heavy vehicles.
Calibration of overtaking models - two-lane road behaviour
As is shown in appendix 2 heavy vehicles perform the majority of the overtakings in the traffic stream. It might therefore be necessary to expand overtaking studies to a truck/bus as experimental vehicle. The overtakings should be analysed according to the advice given for the car as experimental vehicle.
Headway in opposite lane limited by V
Type of
overtaking Terrain vehicleVisible oncoming
Flying overtaking
Accelerated overtaking
Some of the cells will be less well represented than others in the matrix. If the road stretches chosen and the prevailing traffic flow can be judged as representative for conditions in the Indian road network this means that the underrepresented cells can be disregarded. If not, the study'is recommended to continue for different road and traffic conditions so as to provide satisfactory samples also in those cells.
The field study should be performed at two speeds, chosen with regard to the speed distribution for heavy vehicles, e.g. at the 60th and 40th
percentiles of the speed distribution of heavy vehicles. On the one hand,
one should be careful not to choose too high an upper speed as the
number of overtakings will be lower and the time and cost for collecting data unrealistically high. On the other hand, the choice of a lower speed
limit should not be too low as the overtakings will then always take
place. The lower speed will consequently take less time for data
collection.
Data collection is required in flat terrain as well as in hilly terrain. The influence of traffic behaviour is considered greater in flat terrain where the traffic flow is generally higher and priority should be given to studying this although the possibilities of overtakings in hilly terrain to a high extent influence both journey speed and fuel consumption and should not be neglected. Finally, the validation of the system model will show the necessity of the study.
Calibration of crossing models - single-lane traffic behaviour
There is a predominant demand for calibration of the submodel describ-ing crossdescrib-ings between oncomdescrib-ing wide motor vehicles on sdescrib-ingle-lane roads. As already pointed out, the number of crossings increases rapidly with the flow and the delays due to crossings are heavily dependent upon the shoulder condition and the types of vehicles involved. In particular, crossings between heavy vehicles and bad shoulder condition cause considerable delays. Therefore this submodel should be carefully
cali-brated.
Calibration of overtaking models - single lane traffic behaviour
There is also a demand for additional field studies for calibration of the
sub model reflecting the overtaking procedure on single lane roads. Although these occurrences are not too frequent at the low traffic flows prevailing on single-lane roads, they are considered to cause undesirable
delays and changes in fuel consumption. Two aspects have mainly been
studied.
l. The inclination to yield space by entering the shoulder, due to vehicle type, shoulder condition, available sight distance and con-nection with crossings.
2. The reduction in speed of the overtaken/passed vehicle during the procedure due to the shoulder condition.
Different techniques were discussed for collecting data. It is essential
that the technique chosen should not influence the overtaking procedure in a way that gives biased results.
3.2 Additional field studies for validation of the traffic behaviour models
During the final discussions at CRRI on December 20, 1982, it was
claimed that the field studies for validation of two-lane roads in flat,
rolling and hilly terrain should be given the highest priority. Especially in flat and rolling terrain there is a demand for higher traffic flows. It is
recommended that the data be collected over two or three days to admit
both calibration and validation.
Additional field studies are required also for single lane roads, especially directed at hilly and rolling terrain.
lO
4. IMPLEMENTATION OF THE SIMULATION TECHNIQUE
Implementation will be discussed and prepared from three different
aspects.
4.1 Program implementation
Investigation of computer systems available to the Ministry of Transport
and suitable for use.
An investigation was start-ed to survey the different computer systems. It was also found advisable to run the traffic simulation program in the available computers for evaluation of efficiency. The VTI will provide the CRRI with a complete computer program for this purpose and for comparison also with the computers used by the VTI.
4.2 Model implementation
Use of the traffic simulation model for different purposes
In conjunction with the Highway Investment and Maintenance Model
- For Road Assignment
For Road Geometry Design Policy - For Special Road Safety Aspects
It is important to implement the simulation technique properly with
regard to different requests concerning reliability, validity and relevance
of the information obtained.
4.3 Administrative implementation
Education of staff for
- Utilising traffic simulation results
- Regular operation of the traffic simulation program systems
- The continuation of the development of the model system and a capacity for further field studies.
ll
As the simulation technique is very unfamiliar in this field as a tool for the formulation of decision guidelines or for assignment of roads, education of the users as decision makers on different levels is advisable. A deeper understanding of the traffic behaviour will make understanding and evaluation of the results easier. it is also essential that this be backed up by staff familiar with the preparation of input data, the performance of simulation runs and the presentation of relevant output. During the meeting at the Ministry of Transport on December 20, it was determined to prepare courses of suitable length directed to the staff responsible in these areas. See further appendix 1, point 6.
interest was also expressed to maintain a high level of technique by expansion of the models through research work e.g. including junctions and intersections. The minutes of the meeting are enclosed in appendix l.
12
5. DOCUMENTATION OF THE PROJECT
It is important that the project be documented in a way which is useful and convenient for the target group. As a project linked to the Road User cost study, the primary aim of the introduction of the traffic simulation technique is to provide the Highway Design and Maintenance model with traffic characteristics for road user cost calculations. As indicated in the previous section concerning implementation of the traffic simulation technique other applications are also advised. In order to make the presumptive user familiar with the technique and its possibilities a description which is as broad as possible is proposed, in
addition to manuals and dialog programs to facilitate its use.
The documentation of the project is proposed as a joint CRRl-IIT VTII) report and the drafts of the different parts of the project should be exchanged between the institutions.
The following is a proposal for dispositions and headings.
PROPOSALS FOR HEADINGS AND DISPOSITION OF REPORT
(Joint IIT CRRl-VTI report).
I. Background
RUCS and need for traffic information
2. Traffic simulation approach objectives
- methodology
- principles for model construction principles for validation
need for real-life data about implementation
l)
IIT Indian Institute of Technology.
VTI National Swedish Road and Traffic Research Institute.
3.
l3
Shortened description of the VTI-simulation model
input model/structured programs
traffic behaviour model/programs
- output model/programs
(structured programs with the modifications and extensions performed) 4.
10.
Complete description of Indian input models
- description of input models for lndian versions of traffic simula tion
- road description model traffic generation model
Description of two-lane simulation model - description of behaviour model
complete structured programs with reference to (3) Description of single-lane simulation model
- description of behaviour model
complete structured programs with reference to (3)
Complete description of output programs and structured programs with reference to (3)
Field studies and equipment for
- submodel verifications
- system model verifications, calibration and validation Description of roads for validation
road
- traffic
Validation results
- two-lane simulation model
- single-lane simulation model
14
ll. Implementation
technical implementation - model implementation
administrativeimplementation
12. Conclusions and recommendations
With reference to this preliminary proposal the CRRI is providing the
general background and its connection with the Road User cost study.
The VTI is describing the simulation approach and the guidelines for the model s construction and implementation.
A short description of the VTI model is given as a reference for the complete description of the Indian versions worked out by the IIT. The complete structured program is described, illustrating all the modifica-tions and extensions designed for the Indian versions.
The complete descriptions of input models as well as the output for
Indian versions are being worked out by the IIT and VTI together.
The CRRI is describing the field studies performed and the equipment used as well as a catalogue of the roads chosen for the validation of the
models and other field studies. The IIT is performing the validation
providing these results.
A first draft of the report has been requested before the end of March. As the field studies will not be finished until the end of September this demand does not include the validation and the field data. A draft report will be ready in the middle of this year and is intended to be completed at the end of the year. These demands are urgent due to imminent changes of the staff at the CRRI and the Ministry of Transport,
especially the dissolving of the RUCS staff.
It is important that the documentation be completed and manuals worked out before the planned courses in the traffic simulation technique
mentioned above are held.
15
6. PLANNING OF ACTIVITIES IN I983
The activities to be completed under this year are included in the diagram. They concern:
-
Modelling/Programming
- Field studies Implementation
- Documentation
The modelling/programmini work for two-lane road traffic is estimated by Dr Marwah at about 25 manweeks, subdivided into activities accor-ding to the diagram.
The corresponding work for single lane traffic is longer; - about 30 manweeks - according to Dr Palaniswamy - the efficiency of the program must be increased further although considerable progress was reached already in 1982. It is noticed that improvement of the efficiency is necessary both for the validation purpose of the model and for its practical use. For validation purposes the simulated road stretch must not be too short, but must give a sufficiently large number of road blocks and events. The length requirement depends upon the transients in the two entering traffic streams, which have to "die out , so their influences upon the effect variables can be ignored. It is not possible to fully explain this problem here but recommendations for road lengths in different terrains have beengiven after discussions with regard to the
field studies.
The calibration of the traffic behaviour models will possibly indicate that further refinements of the overtaking procedures are necessary as is already pointed out. For the single~lane traffic model crossing behaviour plays an even more predominant role due to the number of crossings and must be handled with care already at low hourly flows.
This indicates the usual uncertainties of research work but it is judged that the difficulties mentioned will not cause delays. It is supposed that the VTI group will be involved in the completion of these activities.
l6
The field studies will take a considerable time to carry out and should be performed in parallel if possible. About 40 manweeks of work is estimated by mr Kadiyali. All equipment requested is now available,
however. The highest priority is given to validation studies for two-lane roads. These will indicate the need for overtaking studies with a truck
as "the test vehicle". As mentioned in earlier section this type of study is very time-consuming and the equipment is needed in other field studies. The validation field study must be performed on roads in all three types
of terrains but flat terrain should be given highest priority in the
overtaking studies.
For single-lane road traffic validation of rolling and hilly terrain conditions is most essential.
Considerable work must be devoted to the general input model/programs as well as the output presentation estimated at about lO weeks. This work asks for a close cooperation between the Kanpur and the VTl group.
The implementation of the models and programs will also take a
considerable time estimated to be at least 20 weeks in addition to documentation.
For VTl there are especially the following tasks to take part in:
0 Optimization of the single-lane simulation program with regard to computer time.
0 Calibration verification and validation process.
0 Evaluation of suitable computer system for production of
simu-lations.
o Bringing the simulation models for single-lane and two lane into the
same system to enable simulation of mixed road stretches. o Generalizing the input and output models/programs.
o Bringing the computer program-system into a "production form" and adjusting it to the Indian road planning and management system.
l7
0 Education of Indian staff of different levels. 0 Documentation.
As indicated in the time schedule the deadline of the preliminary draft is the last day of March. A preliminary report is planned to be released at the beginning of June. This will be completed with validation results and descriptions of roads and traffic in the final report.
The main activities are summarized in the activity/time diagram below.
This diagram presupposes that the financing of the project will not be delayed, a question that will be discussed in the next chapter.
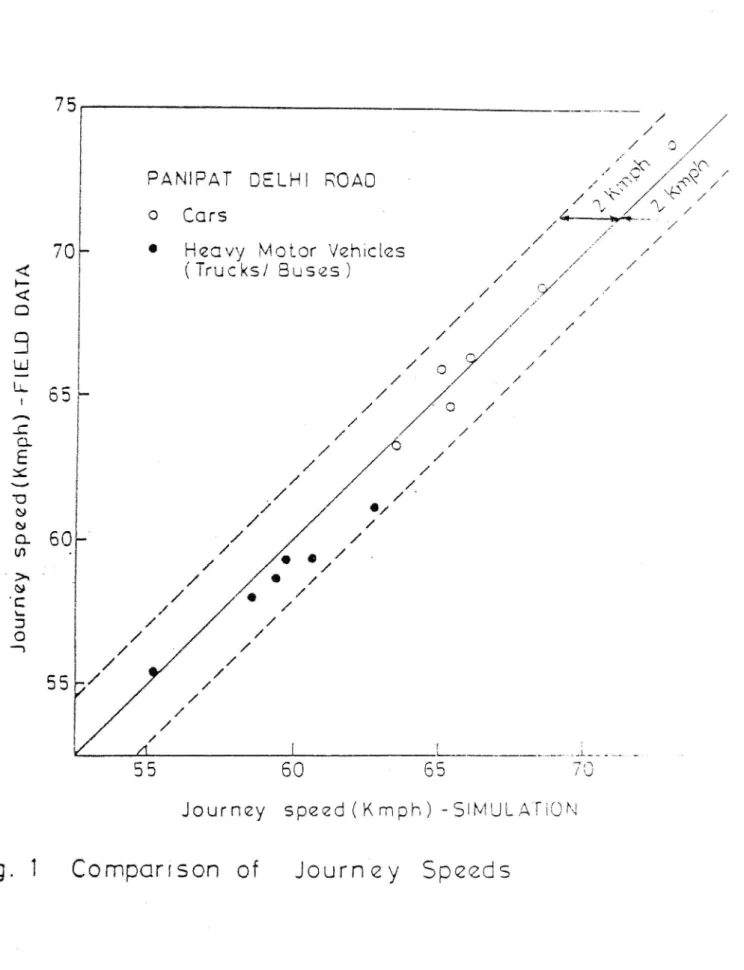
The appendices l and 2 describe a state of the art as demonstrated for the Ministry of Transport at the end of the visit. The diagrams show how simulated journey speeds and overtakings for cars and trucks respective-ly coincide with the correspondent field study results. Distributions of
free flowing, constrained and overtaking cars along the road are also
demonstrated.
ACTIVITY TIME Year 1983
/1 % ¥ 1/4 : 1 1/7 % s 1/10 i :
MODELLING/PROGRAMMING caIibration/validation 41 ¥<D
V
2aIane caIibration/validation preI.documentation doc. vaIidation
road documentation modeT JO ~ " "' " T "° 0 0
(IIT/VTI)
programefficiency ,? __ __
. K " '- ""
igggle-]ane caIibration and vaIidation 4<3 E<D
free row & .
T- VI-I ,. ;, documentatIOn of
II / {11-91 danmntat "and _ _ _ _ __ __ __ _. __ _.Qvahoatmn Q
input/output reI. documentation r)
\.
ene Ii ti
vmm
___ 9 "a 53 0
a
o
C>gocumentation <3 FIELD STUDIES (CRRI)
- caIibration studies
free ow _ ___ * - _ ~ *
single laner __ _ _ _ _ _ _ _ _ _ _ __ _CP
overtaking/crossings §;Ia e :9ag_- __ __ [guertaginq_pf_trug '__ __ L__ __ __ __CD
singIe Iane. overtaking of truck/croiiing§ __ ___ __QD - vaIidation studies
Z Iane road "journey time studies __ __ ___ __C)
flat roII1ng E hIIIy terraIn -
_-SinQIe lane journegtime studipa" __ __ __ ___, ___O fIat roIIing & hiIIy terrain
documentation '5 _____ ._ 2 :qee- - - -.- -%3
equipment & fieldstucies
IMPLEMENTATION
computer __ __ ___ __ __ __ computer
(CRRI_IIT VTI) Ckaroware O' ' Osoftware 4)
._. __ __C\_modeI impIementatian- J \-r3 __ ___ __ ._. _m
. Cpreparation for and
DOCUMENTATION " eneraI philosophy; Educat10n 0f Staff
___ ? 1 f. 1
re . ' . - Ina
CRRI-IIT-VTI
é W o
-
- C>~
< rreport
19
7. FINANCING OF THE PROJECT
The original time schedule for the project was three years and the budget was calculated in accordance with this timeframe.
When the project started one year later than was anticipated, at the beginning of I981, the timeframe was reduced by one year and the budget cut accordingly.
As is shown, however, another year is needed to complete the work, fulfil the documentation and carry out the implementation included in the project as shown being a very important issue. The planning of these activities was foreseen and was prepared as early as in December l98l. A proposal was substantiated in April I982.
Due to changes in the Indian organization - the CRRI is now under the
Council of Scientific and Industrial Research- the processing of the
prOposal has been delayed.
However; it is urgent that the CSIR and the Ministry of Finance in India as well as the SIDA handle the matter as quickly as possible and that all the institutions concerned help us topursue the matter through the CSIR and the Ministry of Finance to avoid further delay,
- since the Ministry of Transport as the presumptive user wants the technique implemented and linked to the Highway Investment and Maintenance Model and
- as the CRRI staff must complete the project before the staff is disbanded
- referring to the rules of the VTI work on the project it must be discontinued until the SIDA approves the budget for I983 due to the exceeded budget of SEK I50 000
The enclosed diagram shows the earlier procedure; the proposal of the project passed after agreement between CRRI and VTI from VTI to CRRI to Ministry of Transport to Ministry of Finance to SIDA for confirmation and SIDA granted the VTI budget. In the present procedure the proposed budget passes from CRRI to CSIR to Ministry of Finance to SIDA and back to VTI.
SWEDISH INDIAN
INSTITUTIONS INSTITUTIONS
Swedish Ministry of . .
International Finance MlnlStry Of
Development Transport
AuthoritySIDA x_, r4 _~ _~_ Road Wing..
AL
x Council of Scientific & Industrial Research'I
->
a . . . -_ _ r wi
"
:
Q k h h t s iI L -il w
C -n
V
I
.. ..
.. ..
.
.... ... "ll-J
l
.
National
7 Central
I CRRI
I
Indian
Road &
.
i1;
Ml. -. .. .. .. .. ._ .. ..
Road.
(sartlstpr )..A
. |_
Institute of-:::::::.
Instituteresearch __ __ I ///L
Institute I I_, , I,
A - .2 I a A K. A
VTI CRRI IIT-Kanpur
L_-__-___J
_~_. >. Signifies the financiation procedure.
1) Earlier organisation for financing the project.
. »a___u__'....,.... « r? +ko 1103291". c -r -n -N -r q -r -'n 1 1 -1 ' 1 W -wm w. . . uw-. M _ -. u-. . _ . . . -. . r . . . «m u~ . . . . . -v T m F
APPENDICES
Appendix 1: Minutes of the meeting December, 1982 page i
Headings of the meeting December, 1982 page 5
Appendix 2: Demonstration of results page i
Appendix 1
Page 1(5)
Minutes of the meeting on Simulation Study_ held in New Delhi on the 20th Dec, 1982.
PRESENT
Ministry of Shippino and TranSpprt_jRoad Ming)
1, Bring. Gobindar Singh, 0.5. (R.D.) and Addl. Secy. 2. Sri. K.K. Sarin, A.D.G. (R)
3. Sri. 0.9. .GUpta, Chief Engineer
4. Sri. Krishan Raj, SUperintending Engineer
U.T.'I. Smach
5.
Mr.'c. Gynnerstedt
I.I.T. Kanpur 6.: a Dr. B.R. Marwah 7. Dr. S.P. Palaniswamy §.RQR.I.8. Sri L.H. Kadiyali, Study Uireccor, RUCS
9. ' Sri. E. Uismanathan, Senior TranSportation Engineer, RUCS
10. Sri. A.N. Ramalingaiah, Traffic and TranSportation Engineer, Rugs
1.. Progress achieved
Mr. Gynnerstedt presented a state oF the art'account oF the Project and informed that the progress achieved on Field Studies and Modelling was good. He was of the opinion that the preliminary results
were very encouraging, which indicated that the V.T.I. model, as modified
For Indian conditions, would be a powerful tool in traffic research and highway investment decisions in India. He was of the view that the work
could be completed by Dec, 1983, provided that no interruptions occur due VTIMEDDELANDE335A
Appendix I Page 2(5)
to delayed Financing, staFF resources are satisFied and the computer system in Kanpur will Function.
2. Two-lane modelg
Dr. B.R. arwah then presented the preliminary results obtained
by the two lane model. He indicated that considerable modiFications had to be made in the U.T.l. model to suit Indian conditions. He inFormed that
the model was calibrated with the help oF data on two stretches on the
Following roads :
(i) Delhi-Panipat section oF N.H. 1, passing through
plain terrain. {3 Mn}
(ii) Kalka Simla section oF N.H. 22, passing through hilly terrain. (6 km} '
i The results, as judged by a cbmparision oF the predictions by the model and the actual Field data, were very encouraging. The model
could now be run with data_From aduitional sites, which the CRRI would be
collecting. There might be need For conducting some studies on the overta~
king behaviour using a truck as the experimental overtaken vehicle.
3. Single-lane model
Dr. S.P. Peleniswamy~gave an account oF the progress achieved on I ,
building up a single lane model, which could be used For an intermediate lane road as wall. He presented the results obtained aFter calibration oF the model with Field data. These results were extremely encouraging and
indicated that the UTI model, as modiFied and extended to singlealane
behaviour was very powerFul and could take care oF a variety oF road and
traFFic conditions. He also presented some results oF the Fuel consumption
model, which was based on an Ambassador car and Ashok Leyland Comet data,
Appendix I Page 3(5)
-3-He informed the members present about the work done at I.I.T. Kanpur on stochastic modelling of traffic flow process using arkov process.
4. Time schedule for theggrolect
Mr. Gynnerstedt informed the members that considerable work
pertaining to field studies would be completed only by July-August. The
('
1
validation of the model can be taken up as and when he field data becomes available. The Final Report could be made available by Dec, 1983. However, a Preliminary Rebort, covering all aspects of field studies, instrumentation and modelling, can be got prepared by June, 1983. This Preliminary Report could then be expanded by additional validation results so as to form the
basis of the Final Report. For preparing the Preliminary Report, Sri.
Kadiyali requested Dr. Marwah and Dr, Palaniswamy to give their Chapters
by the end of March, '83.
5. Financial position
Shri. Kadiyali informed the members that since the Project needed
one more year for completion, additional SIDA funds would be needed. Based
on the proposal received from VTI in April, the CRRI had already approached CSIR to request the Dept. of Economic Affairs for approaching the SIDA
authorities for the additional funds. The matters were expected to be finalised shortly.
6. Implementation of the Model
Mr. Gynnerstedt raised the question of the implementation of the
model for helping in arriving at highway investment decisions. He desired that adequate training should be given to selected staff in using the model, preparing.the road data, and deriving solutions to the problems normally met with in highway design and planning.
Appendix 1 Page 4(5)
-4...
Dr. Maruah also stressed the need For training of the potential users of the model. For thiSpurpose, a small tuo~week course For about 20 participants could be organised at I.I.T. Kanpur. Dr. Maruah was requested to prepare the outline of such a. scheme.
7. Enlargement 0? Simulation sqigt
The meeting discussed possibilities oF enlargement of simulation model For incorporating the presence of junctions, villages, petrol stations etc. The View that emerged was that such interesting studies could be
identified and discussed in the Highway Research Board meeting, so that they could be taken up as Further work.
Brig. Gobindar Singh indicated that it would be desirable if Dr; Narwah anerr. Palanisuamy could be requested to present their work to the Chief Engineers during an IRC Council meeting.
Brig. Gobindar Singh thanked Mr. Gynnerstedt For the help and direction given by him and the U.T.l. in making the Project a success.
an-nrvr v¢¢\ b§
Page 5(5)'
HEADINGS OF THE MEETING ON SIMULATION STUDY AT MINISTRY OF TRANSPORT 1982-12-21
1. State of the art of the project
- traffic simulation models/programs
- field studies
2. Demonstration of results
two-lane road traffic
- single-lane road traffic
3. Completion of the researCh project
time schedule
4. Financing of the project
5. Staff
6. Implementation
consumer's and user's view
7. Proposal for disposition of the report
- time schedule
Appendix 2
Page 1(19)
DEMONSTRATION OF RESULTS
The following comparisons are reported between field studies of road
traffic on defined road stretches and corresponding simulation runs.
In the field studies the individual vehicles in the two traffic streams have been identical and are observed by the vehicle arrival times at two traps some km apart as well as by their spot speeds at the traps.
The geometry of the road stretch between the two traps is registered
and fed into the computer and the observed vehicles are used as input in
the simulation.
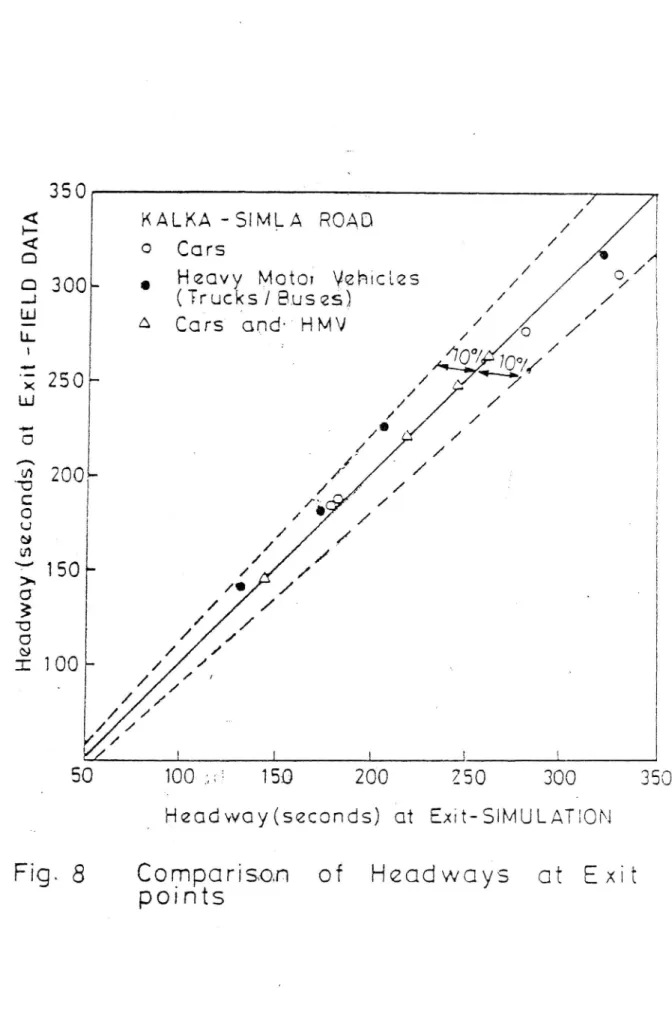
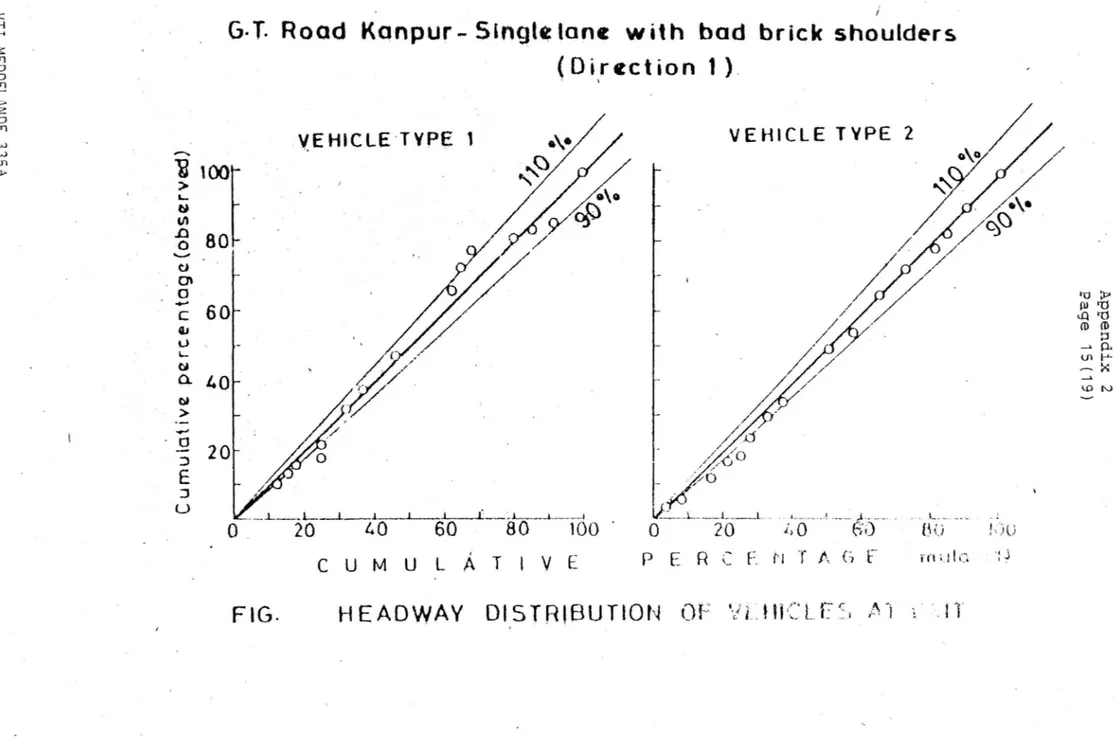
The time headway and the spot speed distributions in the corresponding exit points in the simulation and the field study are compared. Further comparisons are made of the mean values of the journey-times and the overtaking frequencies for cars and trucks/buses when separated.
Jour-ney-times and overtaking frequencies are easily calculated as soon as
the same vehicle is identified in the two traps.
The results are presented in the following pages. The two-lane roads
presented by DR Marwah consist of
- one road in flat terrain PANIPAT-DELHI ROAD
one road in hilly terrain KALKA-SIMLA ROAD
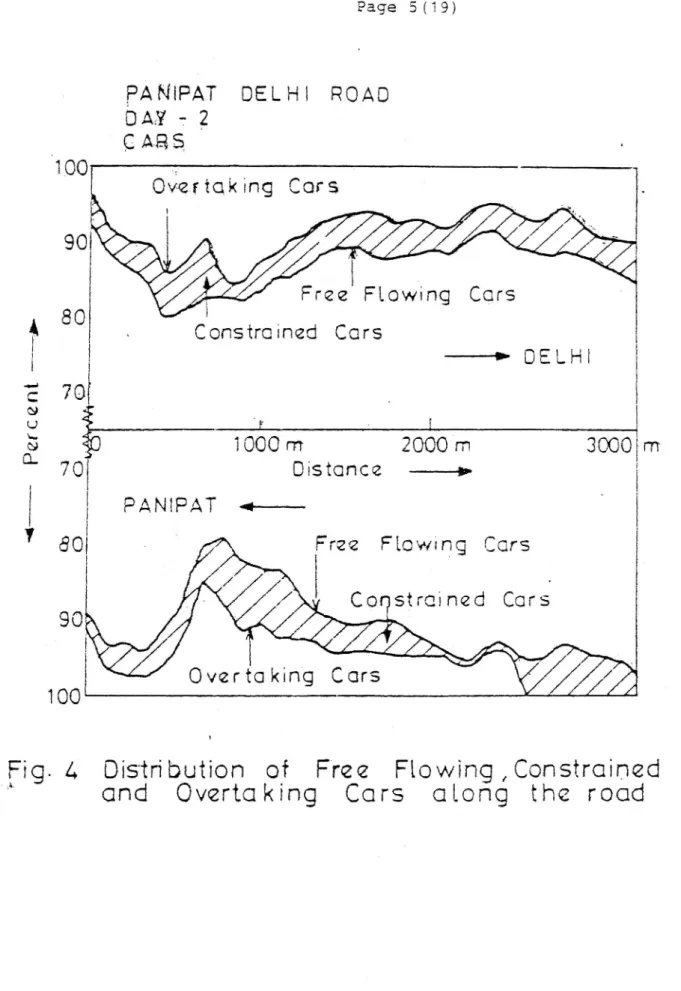
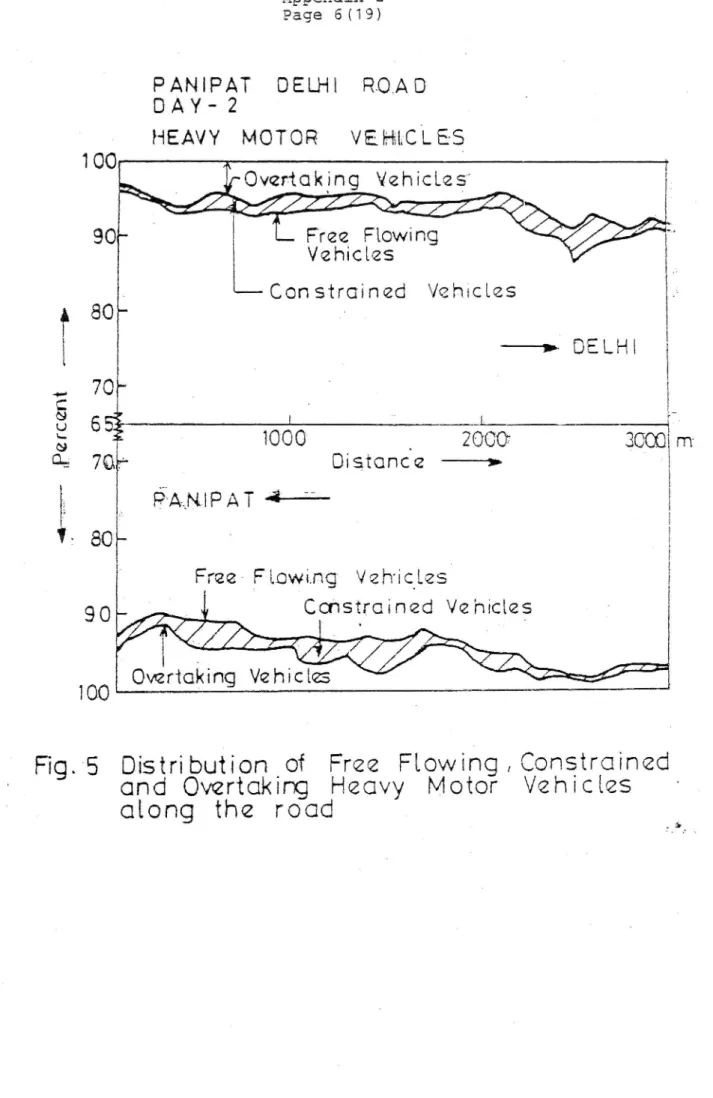
In additional diagrams of the two-lane traffic a presentation is given of
the percentages of free flow traffic, constrained traffic and overtaking vehicles along the simulated road stretch. This representation of the
traffic status along the road serves as a "diagnostic instrument"
indicat-ing where traffic congestions build up and break down due to road and
traffic conditions.
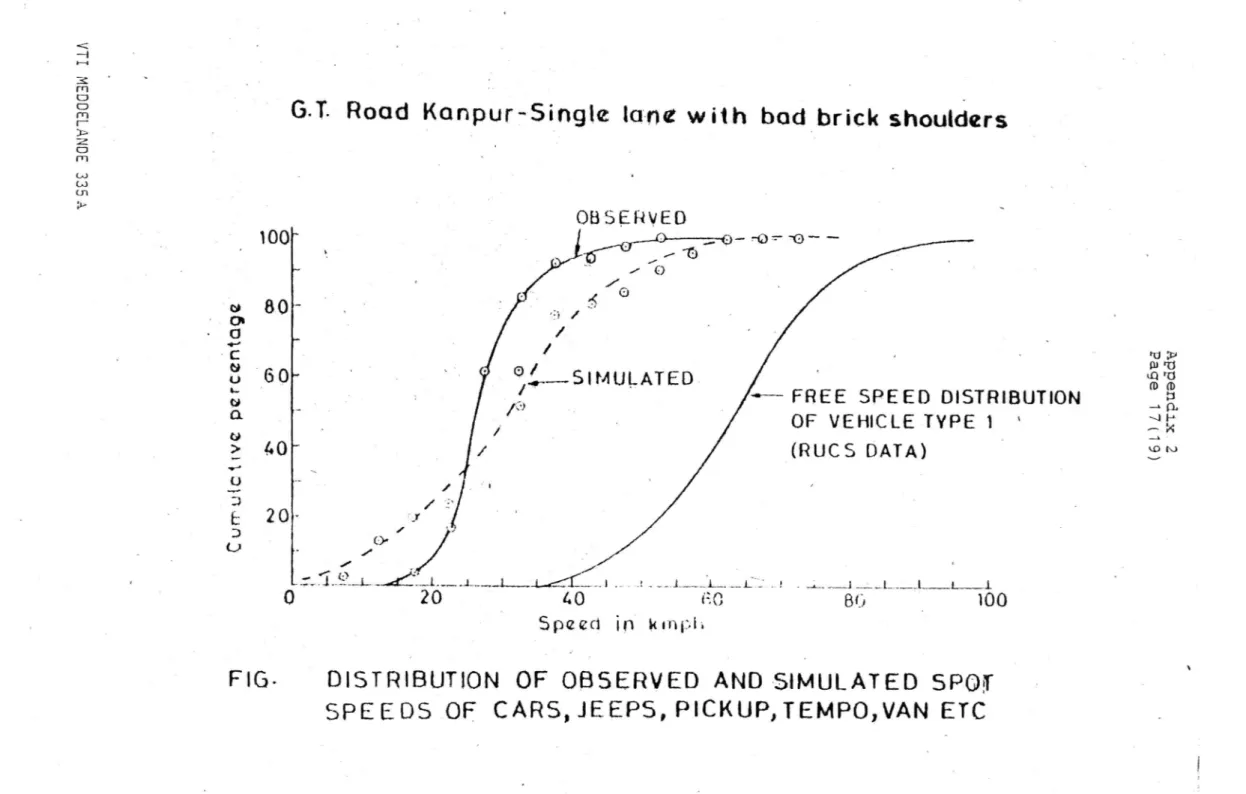
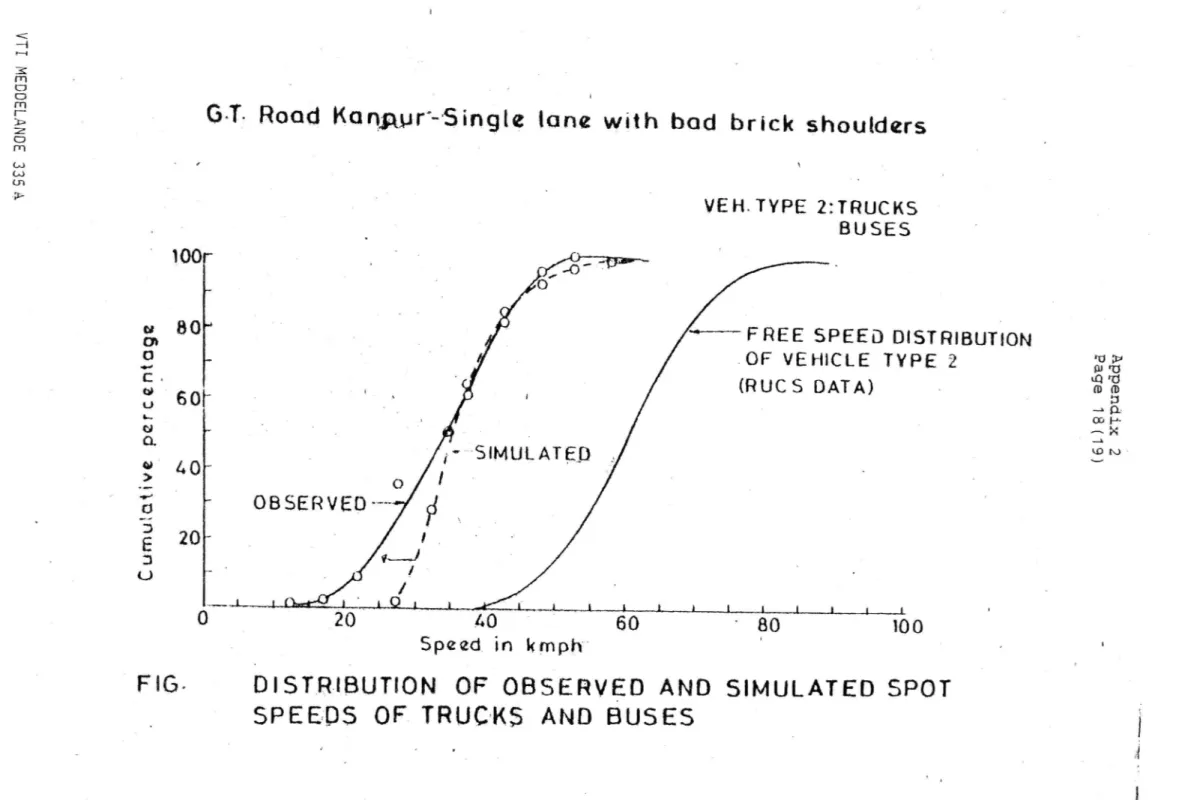
The single-lane road traffic results presented by Dr Palaniswamy consist
of road-stretches in flat terrain
G.T. Road Kanpur
The results demonstrate that the simulation programs as well as the environmental input and output programs are functioning, but also that
laborious calibration and validation work still remains to be done. VTI MEDDELANDE 335A
Fig. 1
Jo
ur
ne
y
Sp
ee
d
(K
mp
h)
~F
IE
LD
DA
TA
Appendix 2 Page 2(19)75
V
/ / / E/ ; // //%(\PANIPAT DELH! ROAD -
/ ,5-8/{ax
/: \,\\\/ \ /
0 cars /4P__;V*M ///
70-
'
Heovy Motor Vx ZthiQS
/
/
T k /R I
/
/
{ rug. S ouses)
/
,
/
/
//
/ / / l// ///
/
/ // Q
./
-- / . / b5-Comporrson of
: t l I J65
Journey speed ( Kmph) «SIMULA'HO xi
Journe y Speeds
VTI MEDDELANDE 335A
Appendix 2 Page 3(19)
PANIPAT
DELHI
ROAD
O O Overtake n Vehicles CAR HMV
OvertQk-ing
CC
0
.
Veh'l ; L123 a A 80-' t I I L ______,______J
O
>
20
40
_ 60
80
100
Number of Overtokings- SIMULATION
.2 Comparison
of
Overtakmgs
-H
e
a
d
wa
y
(S
QC
OH
dS
)
at
E!
- .3
£1
71
0
DA
IA
Appendix 2Page 4(19)
100
if
i, _ /PAN-WAT
DELHI ROAD
/
A
' x O' COLT-S
. .
/(«3-7 G§\°/
o
HQQV
Motor Vehichzs
7/
(Truc s/ Boses)
/
80 "
/
//
/'
/
/A
/
/ //
/
/..
/
I/CEI//l/60-
/1§o /
/ -~ _/
/ ./ 0/
/
/
/
/
/ / i9/x
40*
.
/
, /
/
//
\
/// ///
//.//
/ ' 1 L i20
40
60
80
100
Hoodwoy (seconds). oi Exit ~SiMULATiON
Comparison of Heodwoys oi Exit Points
Appendix 2
Page 5(19)
PA NIPAT DEL H ROAD
.
CABS
1.00
. .
'
'
0%.:thng Cars
90
A
4 80
Constrained Cars
-
-> DELHI
E 70'
a 4;u
4:
Ii
'
1 .
5
10
1000m
2000 m
3000 m;
G- -q .7Q
Dystonce
-
+
:
PANIPAT *
Y 80
Free Flowing Cars
Constrained Coré
90
'
Overtoking Cars
100
Fig. 4 Distribution of Free Flowing onstmined
and Overtakmg Cars atong the road
Appendix 2 Page-6(19)
PANtPAT DELHI
ROAD-DAY-2
'
.
HEAVY MOTOR
VEHL-C LE S
100
I
90
Vehictes
.
Constrained VehicLzs
f 80*
_~
1
~ h DELH{
4.. 70"
2:
§.
8
1
L
*-2;
1:
100 0'
.
2000
3009*, m»
02:5 7Q?
_
Distonce - - >
~
élA-NPAT
'7 80*Free F=Lowi.n g - Vzh ioLZS
90..
_
Constrained Vehic§2$
mo Owrto king Vehictes
~...a" "'
Fig. 6 Dis-m bution .of Free Flowing , Constrained
ond Overtokzrg Hoovy Motor Vohzdos
along the road
_
Appendix 2
Journey Speed (Kmph)- SIMULATION
Fig. 6*
Comparison of Journey Speeds.
VTI MEDDELANDE 335A
Page 7(19)
SO
,
KALKA SIMLA ROAD
/
/ A
O COFS // //
0 Heavy Motor Vehicles
/
//
:5
(Trucks/ Buses)
//
/
<1 / /O
/
/
c3
/
/O/
.J
/
/
u___s
/
LL. 0/ u / A /.c
o.
E
3
<2 Kmpn
U
3 Q.0.
U) > -uc:
5
o.
...,
J
40
SO
N
um
e
r
of
Ove
rm
km
gs
~F
lE
LQ
DA
TA
~Appendix 2 Page 8(19)KALKA ~ SiML A ROAD
- 30'
..
'7;
g
,
/
g
Overtaxmg Vchxcte
/,
i 0 Cars:
/
l/
.
/
Q.
HQGVY
motor vehtckzs
/
O /
(Trucks/Buses)
/
/
20'
i
' L
.O
"
.
IO
20
Number of overtakings-SEMULATEON
7
Comparison of
Over cakmgs
VTI MEDDELANDE 335A
v 7 ' 4 , W A
3O
Appendix 2 Page 9(10)
350
.
/
KALKA- NMLA ROAD
//
0 Cars
:
//
//
__
Heavy Motoi Vehicles
/
0/
300
. (Trucks/Buses.)
/
/
A Cdrs
"ond- HMV
/
O
/
i g-
700//
/250
/ k3% :;
200
150'-Hc
od
wo
yi
sc
co
nd
s)
at
Exi
t
~F
IE
LD
DA
TA
i i J 1SO
iOO :i?
iS-O
200
250
300
350
I H20dwc1y(s<2conds) Cit Exit-SIMULATEON
Fig. 8
Comparison of Headways at Exit
poxnts
VT I ME DD EL AN DE 33 5: &
KALKA 5TS E ML A ROAD
DAY 3 (LN-(3)5 . t k.
[ ~ 'VQI Q H19C
( f3 5100
_
i
90
?
m \ C k) U 3 C C7 v;-m
C O L) t 0 CI ) ,1Free
owmg CorSM/
1 CDP~
rm» SIMLA
l l l,
2000 m
3000 m
4000 m
0 j10
1000 m
'
'
D is f o n C e *4»
LC ) 1 3@
1
0
2
wa
d
«a
.
L O 00ALKA*-+.
Constro i'ned & Overtokmg Cors
w~Fre e
Flowing
Cors W
0) CD 1
1
100
-. r/
I
i
V...r
5000
Distribution of Free memg', Constrained and
Fig;
9;-<
Overtoking Vehicles along the rood
A p p e n d i x 2 P a g e 10 (1 9)
VT I ME DD EL AN DE 33 5: l
K ALK A '1'sfi MLfA ROAD " , 0 AV « 3
-
100
a _
-_
-
/
HEAVY MOTOR VEHICLES
v~ / '
M
;7";7"'7 f7 7 / / / /
'
/
_
/
/
9
Constrained and Overtaking Vehicles
Free Flowing Vehicles
l O 0:)
M U-SIMLA
l O . C \.
'I
.
"l
w , Y I
1
I
1000 m
.
2000 m
3000 m
1.000 m
5000 m
'
Distance W»
t O P~Q
«~
t
ua
wa
d
>
KALKA+ ~
-l O CID90.
Free F lloWintj Vehicles
Constrained. and
..././
..Overtak ing
Vehicle 5
100
3.
v.-,
.
.
.
.
-lf:§ .
I
Fig.10
Distribution of Free Fldwmg , Constrained
_
2and
Overtaking
Vehicles along the road
A p p e n d i x 2 P a g e 11 (1 9)
mwmmm mez dmmmmz HH>
H dmmiwrmoao omw (Ho mp p pmd .SmeQH.
wzdgmHzékwm .4.m .HQ
.mpmwmmomsw wmanmm mo mmm mmmwm mwmmy Qz<
mmow mszo mammbomm, ymmmbmdmg qqzowmw4mmo m4 Ham? m4
mmpmm mom mHqu¢Z¢ onmom mom awedmpswm
_
2¢o mmmwj mnom mbon4> mo mmmoammmm mmszgoo
*
.. V.
.
..mmz«m
oga.qmmmu om MZqH mwwgmm 20mm.wszzqm mmmom mom
mowaqrewm owmmdmg wm4,mom UHwom onewummHm mmHmHZD
. \*
,vaymm,m mo mmHeHgHmdmmd
3mma4wHemm>memmmm mbdm waHm
mac ea mzoomwmm 2H mambo: mMQOHam> mo mmwgadmmug.y*h.
.MHH Mao H4 m demmo
ZMMm Edam mmeHbOmm mo...H wgo maomwumwmmo mmmm -.
1:3, ..Icv . _ . ..;.. .l.. $14, I
«4.4.4..LEE/QM. ,
«1...- 1....) c. cl... . I). All...» . 1.1.4. .434 ..._:a.,...u1...n_v] 34],]... 1.4..613 .1)
EL, 9%? E m .26 Hepm Ego PCF .mb (Farm EL... at
11. 1.
r.
quagao.manz aa434un» mo wm4nunH4 mad m¢._
[LIVTM 2!...- .. . . . yF rluuvllv.. [rleql\ .Ill.r.lll.rIr
dm m.m om mmd owh d m HUQHHQU OH mMmb Emmm bdm QMOm
mammngm-mmmznm and adom .m.m mo ManAOm gm om enema
*.
DHMHM mom QWWommbmm.mem Mbdm m dmwomm EMm H4M vmm *
.mmHBmoa
ammog
mowamb wm amwm may mom madmwomm meamomMDm amwm
m.mmmmwomm AH mH meom1rm ZOHHdQqub m d 20HH¢MMHH¢U *
.NHBZmMMDQ H4ZOHmdmmmo
9Z4 mmwwbmmm.mmmm mam HWQQE HBb QMNDBDDMHmmm *
"admmmmw
.A Hmmmmv wZHHHMQOE.ZOHH4HDSHm 309m
UHmrme m dm MHGZHm mo.mmmw mmm momm HHHB mmmmwomm
Amrvmr mmmm.
Appendix 2 Page 13(19)
CROSS VE'LO C vzf (VEHsCLE TYPE,ROAD
wonH, SHOULDER wme AND CONDmON)
a
.
m
F
. Lu
a.
80
-m r.-w .iLu
5 L...
a:
O
l LL.0
4V3.
:-
i
Z
m
i
u
o: - 20?"
Lu 5.o. ,
1-»
L L l L l ___lO
' 2
8
10
ROAD WiCITH W METRES
F26.
~ HYPOTHETiCAL RELATIONSHW OF
CROSS VELOCiTY AS A FUNCHON OF
[ROAD WIDTH FOR FAST TRAFFIC
VT I ME DD EL AN DE 33 51
1
V ' GI Road Kanpur- 715.5%
"13 'Wf t'm badbrick shoulders
-I
,(
pa
ua
sn
gd
wi
-ug
pa
ad
g
0 . '10
"26
F16.
,
if?
30
mph q1r, 2
W A
L4 1 ?! IV- Trvr] w 1 .1 ,.r"VEHICLE Pf.
+ .
b..- . 6gimmem
j ~. ..."ud
wm
eas
-za
.
111 u a d L 1_S p as d
JOURNEY SPEED 05.111:
vs SIMULATED
VENC LEW "W95 2
:7a 1man
. . G. -L. .. Lqd
Luc
y-pa
ge
[1
11
3;
13
3:
11
7
c l q1m
m»
1-92
wx
3.72
L111
1'1
,iin ' k m ph ( imulatcd)
HlCLETYPES «1:3. 2 oagmygp
. .l _ .__ '-0 o
10
'20
30,
1.01
. A p p e n d i x 2 P a g e 1 4 ( 1 9 )VT I ME DD EL AN DE 33 f;q A
(
p
a
m
zs
q
m
a
m
ua
j
m
d
a
A
g
m
m
a
n
3
6" Road Kanpur~smgtclunc with bad brick sho/ulders'
(Direction 1).
VEHICLE TYPE 2
00 " x . ' I. r. ;.L LC u M u L A T l v E
P E R c {a m r n. (1-; '5'
mm;
wFIG.
HEADWAY D|ISTROBUTION OF: "3'1.9-1i i?i-.'f3 3A ? 17217"
80
160'
0
20 "
9J0 .13 I 7 A p p e n d i x 2 P a g e 15 (1 9)
VT I ME DD EL AN DE 33 52 X
(p
-a
tm
as
qo
)
36
03
11
23
4.
ad
a
a
g
m
m
m
n
g
\Rood Kanpur-Singlelanc wiih bod brick shoulders
' L
300
280
60*
am-CUMULATIVE
FIG...
VEHICLE TYPE
1 l *vr' l1' 7 rrL.' * 60
(Direction 2)
1 f _
VEHICLE TYPEZ
' A p p e n d i x 2 P a g e 16 (1 9) 0 1 1V .1 1 L i 1_ i 1 _100
0
20
_ 1.0
60
80
100
-P E R c E NT A s E(Simulotcd)
J l léo
, HEADWAY DISTRIBUTION OF'VEHICLES
AT EMT
~. " l . v 'VT I ME DD EL AN DE 33 5A .
__
36
01
u2
32
ad
a
m
I
3}
*J-mi)
GI. Rood Konpur-5ingle lane: with bod brick shoulders
OBSERVED
L O O L Q Q' - LMSIMuLATED
' [13) f 1 O ; (DW FREE SPEED DISTRIBUTION
OF VEHICLE TYPEI
'
mucs DATA)
<3q, L I \ ' _ \
6
ND:fiELLWJ£fWLWML L »;r<CWJ, J WIWMLWML: 2.4mM4DDI I I I
0
20
40
EC
80
100
Speed in RHHHI
FIG.
DISTRIBUTION OF OBSERVED AND SIMULATED Spogr
SPEEDS 0F CARS,JEEPS, PICKUPJEMPONAN ETC
A p p e n d i x. 2 P a g e 1 7 ( 1 9 )
VT I ME DD EL AN DE 33 5é¥
a
m
ua
31
3d
swi
ng
-a
wn
3
GI. Rood Korygyr inglg lane with bad brick shoulders
\
VE H. TYPE ZITRUCKS
BUSES
é
1
CDa;
WFREE SPEED DISTRIBUTION
.OF VEHICLE TYPE 2
(RUCS DATA)
be (3 (0 A p p e n d i x 2 P a g e 1 8 ( 1 9 ) L C) \1 C3 N ,o _
,_ 1 g{.20
_ \IJEQ ; 11.0 ' '
'L .1 q l 1 1 L 1 J l J n I5.0
~ 50
100
Speed, in kmph
FIG
DISTRIBUTION OF OBSERVED AND SIMULATED SPOT
SPEEDS OF TRUCKS AND DUSES
I
i
}
m
3mm wez woaz E
H g mm hmOHo omB Mo mpdp pm H.QMH@QH
b ém d m . m . m . Hm
.
. -mmm b @wmmmmo momzmommm
mm 8 Mmogo .mmb g mm £me zSH BHm Smc 1mg .mmHmmam
mom. a 832mm 3on m
05 Mom 39me $335QO
*
Fm {2 o H Eu
.vm wm mHmomv mo EQ.%H Mmb mo mH ma.qu
HMNW¢Hm mB MS m
Swag zomzqm 20 @3373 mm B6
9.8
8m: 1mg 93. maggom mo QBHEQBBB 0
{3' 4 EQH .UE * 14 |~I,A . ,
, A ..wmm% Kyomw nm SOME .vawdamo
mM4 mmHmHgHmamomm Mmomg.szHmHmzoo.MDmba mHHg mmHa
Emmomo m5. £83m wozagpgm a m4 @ g m
mm as. 89% $.95 aaomwmm .20.. DB mo ma a
mmmBmE mo mm.me
mom mmoaodm wozgdcmba
;4
El
V1
..
.. mQOm. Eda $54.5 . éo 8. mm maMm szm 9.3. 558m
,. OE mom Magoo [B .w mme Scams
. y.
A
wmom \
a om. Wm mg . g dm mpg@Qmwozom 3. mg mgOHS BS 0
1. 1.1 4- 3....4 «1 84314.4 4. 14!. 3.1.. 1.49.4" J..L1
EC HER» Hr. HLV,.._UF_. "PO UEerrk EEqu E. MERLIN *
. :33.qu and 283880 .mmem
ZOHHHQOQ
manna. E BEE ESE? mo Mommwwmmm . muréqom >5qume
20 vamme mmmoomm mango @0me om ... Hum @833an
rn.$090.? ,.Mmm Zo MEMO Roz ZOHHQEOWHM ma aauaoo mm.me .*
.mmmd aw mH madam mg _ 05 30%?
mom. ammog
m k g a. $3 Ema aquime ma mm BE.
m
Mom szHHEMm. @5me swam, QOHHQOE.-.
*
O, 4 '11417 'I.
WEOFE < FELr
34% mo ma a HQ
.
mom @8ngngon US$49
mom $83 @314;Saw
.*
mmmoomm boMNJg wZHmb mmmoomm 30me UHmmddm. mo wZHGHMQOS UHBm mUOBIm.
Amrvmr mwmm