www.vti.se/publikationer
Mattias Hjort Fredrik Bruzelius Håkan Andersson
Överstyrning på is och snö med olika vinterdäck
Metodutveckling och fältstudie
VTI rapport 708 Utgivningsår 2011
Utgivare: Publikation: VTI rapport 708 Utgivningsår: 2011 Projektnummer: 40828 Dnr: 2010/0015-25 581 95 Linköping Projektnamn:
Överstyrningstest med vinterdäck
Författare: Uppdragsgivare:
Mattias Hjort, Fredrik Bruzelius och Håkan Andersson Skyltfonden
Titel:
Överstyrning på is och snö med olika vinterdäck – metodutveckling och fältstudie
Referat (bakgrund, syfte, metod, resultat) max 200 ord:
Trafikolyckor vintertid karaktäriseras i högre grad än olyckor sommartid av att föraren tappar kontrollen över fordonet och en sladdsituation uppstår. I en studie av Trafikverket visas att för dödsolyckor som inträffat under vintersäsong så hade föraren fått sladd i 64 % av de olyckor som inträffat på vinterväglag. Av dessa var 82 % så kallade överstyrningsolyckor, dvs. sådana där föraren fått rotation på fordonet. Syftet med denna studie var att ta fram en metod för provning av ett fordons stabilitet vid överstyrning på halt underlag samt att testa hur stor skillnad olika typer av däck gör för stabiliteten vid halt väglag. En testmetod baserat på NTHSA:s sine-with-dwell-manöver togs fram. Manövern använder en rattrobot som med en precis styrmanöver framkallar kraftig överstyrning även på hala underlag som is och snö. Manövern användes sedan på en bakhjulsdriven personbil med antisladdsystem, utrustad med både nya och slitna vinterdäck av de tre olika typer som förekommer, för att jämföra hur mycket överstyrning som går att åstadkomma vid en styrmanöver med de olika däcken på olika is- och snöytor. Resultaten visar att på blank is har dubbdäcken en klar fördel. Även det rejält slitna dubbdäcket, med endast ett fåtal dubbar kvar, klarar sig bra jämfört med de odubbade däcken. Det slitna dubbdäcket är jämförbart med det nya odubbade däcket av nordisk typ och klart bättre än det nya däcket av centraleuropeisk typ. Däcken av centraleuropeisk typ sticker ut på detta underlag som de som genererar mest överstyrning. På underlag med högre friktion, som ruggad is och snö, är det däcken med minst väggrepp som genererar minst överstyrning, vilket gör att en tolkning av testresultaten i termer av trafiksäkerhet är svår att göra. För detta måste en avvägning mellan styrförmåga och den inducerade överstyrningen göras, vilket är komplicerat och kräver fortsatta studier.
Publisher: Publication: VTI rapport 708 Published: 2011 Project code: 40828 Dnr: 2010/0015-25 SE-581 95 Linköping Sweden Project:
Överstyrningstest med vinterdäck
Author: Sponsor:
Mattias Hjort, Fredrik Bruzelius and Håkan Andersson Skyltfonden
Title:
Oversteering on ice and snow with different winter tyres – Method development and field study
Abstract (background, aim, method, result) max 200 words:
Traffic accidents during winter time are to a larger extent categorized by loss of vehicle control resulting in a skidding accident, compared to accidents occurring summer time. In a study by the Swedish
Transport Administration, it was shown that for fatal accidents happening winter time, skidding had occurred in 64% of the accidents on winter road conditions. Out of these, 82% were so called over steering accidents, i.e. events where the vehicle starts to spin.
The purpose of this study was to develop a method for testing a vehicle's stability during oversteering on slippery roadways, and to use this method to test how large the difference is between different kinds of winter tyres on ice and snow.
A test method based on NTHSA's sine with dwell manoueuvre was developed. The manouevre uses a steering robot and induces heavy oversteering on slippery surfaces, such as ice and snow.
The manouevre was then used with an ESC equipped back wheel driven passenger car, fitted with both new and worn winter tyres of the three different kinds that are available in Sweden, to compare the level of oversteering that is possible to obtain with a steering manouevre on different ice and snow surfaces. The results show that studded tyres are more stable than unstudded on smooth ice. Even the worn studded tyre, with only a fraction of the studs remaining, is performing well compared to the unstudded tyres, and is comparable to a new unstudded winter tyre of Nordic type and much better than the tyres of Central European type. The winter tyres of Central European type stands out as those generating the most oversteering on this surface. On surfaces with higher friction level, the tyres with the least grip are also those that generates the least oversteering, which makes it difficult to discuss those results in terms of traffic safety. To do that it is necessary to also take into account the steering ablility of the tyres, which is complicated and would require further studies.
Keywords:
Winter tyre, oversteering, sine-with-dwell, spin-out, test manouevre, studded, unstudded, Nordic winter tyres, Central European tyres
ISSN: Language: No. of pages:
Förord
Slutrapporten är framtagen med ekonomiskt stöd från Trafikverkets Skyltfond. Stånd-punkter och slutsatser i rapporten reflekterar författaren och överensstämmer inte med nödvändighet med Trafikverkets ståndpunkter och slutsatser inom rapportens ämnes-område.
Mattias Hjort, VTI, har varit projektledare och huvudförfattare. Tillsammans med Fredrik Bruzelius, VTI, och Håkan Andersson, VTI, har testmetoder tagits fram och tester utförts. Författarna vill rikta ett tack till Sven-Åke Lindén, VTI, som har assisterat vid testerna. Ett tack också till Roland Jacobsson, VTI, för tillverkning av de special-instrument som krävdes och Anders Andersson, VTI, för genomförande av simule-ringarna. Vi vill också tacka Staffan Nordmark, VTI, och Jonas Jansson, VTI, för värdefulla diskussioner samt Johan Strandroth, Trafikverket, och Matteo Rizzi, Vectura, för en genomgång och diskussion av arbetet. Slutligen vill vi tacka Andreas Tapani, VTI, för en noggrann granskning av rapporten och för flera förslag till förbättringar.
Linköping, maj 2011
VTI rapport 708
Kvalitetsgranskning
Granskningsseminarium genomfört 2011-02-25 där Andreas Tapani, VTI, var lektör. Mattias Hjort har genomfört justeringar av slutligt rapportmanus. Projektledarens närmaste chef Jonas Jansson, VTI, har därefter granskat och godkänt publikationen för publicering 2011-05-23.
Quality review
Review seminar was carried out on 25 February 2011where Andreas Tapani, VTI, reviewed and commented on the report. Mattias Hjort has made alterations to the final manuscript of the report. The research director of the project manager Jonas Jansson examined and approved the report for publication on 23 May 2011.
Innehållsförteckning
Sammanfattning ... 5
Summary ... 7
1 Introduktion ... 9
1.1 Bakgrund till studien ... 9
2 Framtagning av testmetod ... 11
2.1 Antisladdsystemets funktion ... 11
2.2 Överstyrning ... 12
2.3 Testmetod för maximal överstyrning ... 16
3 Test: upplägg och genomförande ... 24
3.1 De testade däcken ... 24 3.2 Testutrustning ... 25 3.2.1 Kör-robot 25 3.2.2 Mätutrustning 26 3.3 Testutförande ... 26 4 Testresultat ... 30
4.1 Jämförelse med och utan antisladdsystem ... 30
4.1.1 Polerad is 31 4.1.2 Ruggad is 32 4.1.3 Robusttest 33 4.1.4 Test av alla däcken – låg temperatur 38 4.1.5 Test av de nya däcken – hög temperatur 41 5 Diskussion ... 44
5.1 Testmetoden ... 44
5.2 Jämförelse mellan däcken ... 45
5.3 Slutsatser ... 45 Referenser ... 47 Bilagor: Bilaga 1 Mätkurvor Bilaga 2 Simuleringar Bilaga 3 Däckdata
Överstyrning på is och snö med olika vinterdäck – metodutveckling och fältstudie av Mattias Hjort, Fredrik Bruzelius och Håkan Andersson
VTI
581 95 Linköping
Samman
fattning
Trafikolyckor vintertid karaktäriseras i högre grad än olyckor sommartid av att föraren tappar kontrollen över fordonet och en sladdsituation uppstår. I en studie av
Trafikverket så visas att för dödsolyckor som inträffat under vintersäsong så hade föraren fått sladd i 64 % av de olyckor som inträffat på vinterväglag, Av dessa var 82 % så kallade överstyrningsolyckor, dvs sådana där föraren fått rotation på fordonet.
Syftet med denna studie var att ta fram en metod för provning av ett fordons stabilitet vid överstyrning på halt underlag samt att testa hur stor skillnad olika typer av däck gör för stabiliteten vid halt väglag.
En testmetod baserat på NTHSA:s sine-with-dwell-manöver togs fram. Manövern använder en rattrobot som med en precis styrmanöver framkallar kraftig överstyrning även på hala underlag som is och snö.
Manövern användes sedan på en bakhjulsdriven personbil med antisladdsystem, utrustad med både nya och slitna vinterdäck av de tre olika typer som förekommer, för att jämföra hur mycket överstyrning som går att åstadkomma vid en styrmanöver med de olika däcken på olika is- och snöytor. Resultaten visar att på blank is har dubbdäcken en klar fördel. Även det rejält slitna dubbdäcket, med endast ett fåtal dubbar kvar, klarar sig bra jämfört med de odubbade däcken. Det slitna dubbdäcket är jämförbart med det nya odubbade däcket av nordisk typ och klart bättre än det nya däcket av
centraleuropeisk typ. Däcken av centraleuropeisk typ sticker ut på detta underlag som de som genererar mest överstyrning. På underlag med högre friktion, som ruggad is och snö, så är det däcken med minst väggrepp som genererar minst överstyrning, vilket gör att en tolkning av testresultaten i termer av trafiksäkerhet är svår att göra. För detta måste en avvägning mellan styrförmåga och den inducerade överstyrningen göras, vilket är komplicerat och kräver fortsatta studier.
Oversteering on ice and snow with different winter tyres – Method development and field study
by Mattias Hjort, Fredrik Bruzelius and Håkan Andersson VTI (Swedish National Road and Transport Research Institute) SE-581 95 Linköping Sweden
Summary
Traffic accidents during winter time are to a larger extent categorized by loss of vehicle control resulting in a skidding accident, compared to accidents occurring summer time. In a study by the Swedish Transport Administration, it was shown that for fatal
accidents happening winter time, skidding had occurred in 64% of the accidents on winter road conditions. Out of these, 82% were so called over steering accidents, i.e. events where the vehicle starts to spin.
The purpose of this study was to develop av method for testing a vehicle's stability during oversteering on slippery roadways, and to use this method to test how large the difference is between different kinds of winter tyres on ice and snow.
A test method based on NTHSA's sine-with-dwell manoueuvre was developed. The manouevre uses a steering robot and induces heavy oversteering on slippery surfaces, such as ice and snow.
The manouevre was then used with an ESC equipped rear-wheel driven passenger car, fitted with both new and worn winter tyres of the three different kinds that are available in Sweden, to compare the level of oversteering that is possible to obtain with a steering manouevre on different ice and snow surfaces. The results show that studded tyres are more stable than unstudded on smooth ice. Even the worn studded tyre, with only a fraction of the studs remaining, is performing well compared to the unstudded tyres, and is comparable to a new unstudded winter tyre of Nordic type and much better than the tyres of Central European type. The winter tyres of Central European type stand out as those generating most oversteering on this surface. On surfaces with higher friction level, the tyres with least grip are also those that generate least oversteering, which makes it difficult to discuss these results in terms of traffic safety. To do this it is
necessary also to take into account the steering ability of the tyres, which is complicated and would require further studies.
1 Introduktion
1.1
Bakgrund till studien
Trafikolyckor vintertid karaktäriseras i högre grad än olyckor sommartid av att föraren tappar kontrollen över fordonet och en sladdsituation uppstår. I en studie av
Trafikverket (Strandroth et al., 2011) så visas att för dödsolyckor som inträffat under vintersäsong så hade föraren fått sladd i 64 % av de olyckor som inträffat på vinter-väglag, vilket kan jämföras med 18 % för de olyckor som inträffat på torrt eller vått väglag. Bland sladdolyckorna på vinterväglag så var 82 % av olyckorna så kallade över-styrningsolyckor, dvs. sådana där föraren fått rotation på fordonet. En anledning till att denna typ av olycka dominerar statistiken bland dödsolyckorna är att den ofta leder till en sidokollision vilket normalt får allvarligare konsekvenser än en frontalkollision. Dubbdäck är generellt mer motståndskraftiga mot överstyrning på isunderlag jämfört med odubbade vinterdäck då de på grund av dubbarna tål större styrvinklar innan de tappar sidgreppet (Nordström 2004, Hjort, 2005). Detta framgår också i Trafikverkets studie av dödsolyckor. Där var 49 % av olyckorna på vinterväglag med dubbdäck överstyrningsolyckor, jämfört med 65 % för odubbade vinterdäck.
Introduktionen av antisladdsystem i fordonen har betytt mycket för trafiksäkerheten. Man uppskattar att introduktionen av antisladdsystem har minskat antalet singelolyckor med dödlig utgång internationellt med 30–50 % för personbilar utrustade med antisladd-system och mellan 50–70 % för stadsjeepar (Ferguson, 2007). Några studier har också funnit att antisladdsystem är extra effektiva vid vått eller isigt väglag (Lie et al., 2004, 2006; Thomas, 2006). I Trafikverkets studie av dödsolyckor (Strandroth et al., 2011) så var endast ett fåtal av fordonen i olyckorna utrustade med antisladdsystem vilket kan tyda på att sladdolyckor, och då speciellt överstyrningsolyckor, som leder till döds-olyckor är ett problem som kommer att minska i omfattning i takt med att antisladd-system blir mer utbrett i fordonsflottan. I den svenska databasen för skador och olyckor inom vägtransportsystemet (STRADA) så saknas idag uppgifter om fordonens däck vilket innebär att det inte går att få en direkt koppling mellan däck och risken för överstyrningsolyckor från det materialet.
VTI har tidigare genomfört en studie (Hjort och Andersson, 2009) där däckens inverkan vid en hastig undanmanöver med antisladdutrustade fordon på isigt underlag under-söktes. Man kom då fram till att det var stor skillnad i prestanda mellan de testade däcken, där de odubbade vinterdäcken av så kallad centraleuropeisk typ var mer sladd-benägna än det odubbade vinterdäcket av så kallad nordisk typ. Testmanövern, som utfördes med testförare, var inte ett renodlat test för överstyrning, utan inbegrep också ett visst mått av understyrning.
Syftet med denna studie har varit att undersöka rent tekniskt hur stor inverkan valet av däck kan ha på ett antisladdutrustat fordons benägenhet för att råka ut för överstyrning. Mer specifikt ville vi undersöka hur mycket överstyrning som är möjligt att åstad-komma med olika typer av däck på halt underlag. Då det inte finns någon standard-metod för att mäta möjlig överstyrning på halt underlag behövde vi ta fram en lämplig testmetod.
10 VTI rapport 708
flera aspekter, som kontrollerbarhet, repeterbarhet och möjlighet till en mer generell testmetod, men det saknas metodik för att jämföra olika fordon med varandra. NHTSA (National Highway Traffic Safety Administration) i USA har tagit fram en testmetod kallad sine-with-dwell för de acceptanstester av antisladdsystem som nya bilar i USA måste passera from 2011. Sine-with-dwell är gjord för att försätta ett fordon i en situa-tion med kraftig överstyrning, men NHTSA fokuserar enbart på jämförelsen med och utan antisladdsystem för ett och samma fordon. Metodiken är inte avsedd för att jämföra prestanda mellan olika fordon och inte heller jämföra inverkan av olika däck på samma fordon.
Metoden för våra tester ska kunna användas för att jämföra olika fordon med varandra och möjliggöra en jämförelse av den inverkan av olika typer av däck har på ett fordon. Då förartester riskerar att bli för speciella för att ge en bred bild av hur fordonet presterar var vår utgångspunkt att testmetoden skulle använda en förarrobot. Vidare så skulle den bygga på sine-with-dwell-manövern då denna visat sig lämplig för att fram-kalla kraftig överstyrning och är en standardmetod i USA. Både manöver och metodik skulle dock behöva modifieras för tester på lågfriktion och för att kunna användas för våra syften.
Efter att testmetoden tagits fram skulle den användas för att testa de tre olika katego-rierna av vinterdäck: dubbdäck, odubbade nordiska vinterdäck samt odubbade central-europeiska vinterdäck, både nya och slitna, på några olika hala vinterväglag på testbana, i syfte att testa betydelsen av däckval.
Projektet utfördes i två delar:
1. Utveckling av testmetodik. Sine-with-dwell-manövern simulerades för låg frik-tion med hjälp av fordonsdynamiksimuleringar. Detta för att få kunskap om hur manöver skulle kunna modifieras och utvärderas innan vi fick tillgång till fält-tester på bana. Dels ville vi se om det gick att få överstyrning med ett i grunden understyrt fordon på homogen testbana med låg friktion endast med rattutslag. Vi ville också få en uppfattning om hur stor skillnad man kunde förvänta sig mellan olika typer av däck. Manövern trimmades sedan in på testbana. 2. Genomförande av robottesten på provbana med is och snö. Endast ett fordon
användes. Tre typer av vinterdäck: dubbdäck, nordiskt dubblöst vinterdäck och centraleuropeiskt vinterdäck. Ett nytt samt ett slitet däck av varje innebar totalt 6 olika däck. Tre olika typer av underlag användes: hal slät is, ruggad is och packad snö.
Det är viktigt att notera att vår studie inte var ämnad att jämföra de specifika däck-märken eller modeller som använts i testet. Då vi bara hade ett däck av varje sort kan vi inte heller dra generella slutsatser om de olika kategorierna av däck. Denna studie ska ses som en pilotstudie för att ge svar på några grundläggande frågor (se resultatav-snittet) och för att förhoppningsvis kunna fånga upp trender när det gäller överstyrning mellan de olika typerna av däck, likväl som nya och slitna. Då det är en ny testmetod som tagits fram är det svårt att dra tydliga slutsatser angående trafiksäkerhetsaspekter från de uppmätta skillnaderna mellan däcken.
Rapporten är uppdelad så att framtagningen av testmetod beskrivs i kapitel 2, upplägg och genomförande av testerna i kapitel 3 och testresultaten i kapitel 4. I kapitel 5 diskuteras testmetoden och vilka slutsatser vi kan dra av testresultaten. Detaljerade mätkurvor över mätningarna och resultaten från simuleringarna ges i bilagor.
2
Framtagning av testmetod
2.1 Antisladdsystemets
funktion
Ett antisladdsystems uppgift är att hjälpa föraren att behålla fordonets stabilitet. Det innebär att fordonet ska följa den kurs föraren önskar utan att spinna runt (överstyrning) eller gå rakt fram i en kurva (understyrning). För att åstadkomma detta använder
systemet bromsarna på enskilda hjul för att kontrollera fordonets girrörelse. Med gir-rörelse menar man den rotation ett fordon utför runt en tänkt axel vinkelrät mot marken. Vid körning med konstant hastighet på en rak väg gör inte antisladdsystemet någon nytta. Det är först när fordonet styrs in i en kurva, vid körfältsbyten, vid undvikande av ett hinder eller liknande som systemet aktiveras. Två typiska situationer som kan uppstå vid en kurvtagning är överstyrning och understyrning. Figurerna nedan visar den
grundläggande metoden för hur ett antisladdsystem hanterar dessa två situationer.
Hantering av överstyrning i en kurva
Systemet ansätter bromsarna på ett eller båda yttre hjulen för att ge bilen ett vridande moment som är motriktat den girrotation som överstyrningen gett upphov till. Detta moment hindrar bilen från att rotera in i kurvan och man undviker bakvagnsställ.
Figur 1 Kurvtagning med och utan antisladdsystem vid överstyrning.
Hantering av understyrning i en kurva
Systemet ansätter bromsen på det inre bakhjulet för att ge bilen ett vridande moment i kurvans riktning. Detta moment undertrycker understyrningsbeteendet och hindrar bilen från att köra rakt fram i kurvan.
12 VTI rapport 708
Figur 2 Kurvtagning med och utan antisladdsystem vid understyrning.
Ett antisladdsystem fungerar genom att kontinuerligt mäta fordonets girrotationshastig-het (definieras senare), rattutslaget och fordonets hastiggirrotationshastig-het. Rattutslaget och fordonets hastighet används för att beräkna den gir-rotationshastighet fordonet borde ha, vilket sedan jämförs med den faktiska gir-rotationshastigheten. Om detta beräknade värde skiljer sig alltför mycket från det uppmätta värdet så skapar systemet ett korrigerande kraftmoment genom att ansätta bromsarna på enskilda hjul.
Bland fordonstillverkare finns det olika strategier bakom hur ett antisladdsystem ska ingripa. Några strävar efter att reducera fordonets hastighet under ett ingripande, medan andra enbart fokuserar på fordonets stabilitet. Många minskar dessutom motoreffekten under ett ingripande för att ytterligare sakta ner fordonet.
För mer information om antisladdsystem se exempelvis (Linder et al., 2007) och (Hjort et al., 2009).
2.2 Överstyrning
Överstyrning definieras inom fordonsdynamiken genom att betrakta ett fordon som kör med konstant hastighet längs en cirkel. För en given kurvradie och hastighet så krävs för varje fordon en specifik rattvinkel. Om fordonets hastighet ökas så kan det kräva en ändring av rattvinkeln för att det fortfarande ska följa samma cirkelbana.
Om rattvinkeln måste ökas sägs fordonet vara överstyrt Om rattvinkeln måste minskas sägs fordonet vara understyrt
Om ingen ändring av rattvinkeln krävs sägs fordonet vara neutralstyrt.
Överstyrning är alltså i grunden en fordonsegenskap som är kopplad till fordonets bete-ende vid en hastighetsförändring under stationär körning. Så gott som alla personbilar är idag understyrda. Anledningen till det är ökad trafiksäkerhet. Ett överstyrt fordon blir vid en viss kritisk hastighet instabilt. Det går att framföra ett överstyrt fordon i hastig-heter lägre än den kritiska, men vid och över den kritiska hastigheten tappar man kontrollen över fordonet. Förlorad kontroll med ett överstyrt fordon leder till att bilens bakända roterar ut och fordonet börjar snurra, en så kallad ”spin-out”. Ett undertyrt fordon som tappar kontrollen tenderar istället att tappa styrförmågan och gå rakt fram, en så kallad ”plow-out”.
De mest grundläggande orsakerna till att ett fordon är över- eller understyrt är dess axelavstånd, viktfördelning mellan fram- och bakaxel samt framdäckens väggrepp i förhållande med bakdäckens väggrepp (egentligen det laterala väggreppet, dvs. de sidkrafter som däcken kan producera). Även fordonets styrsystem och fjädringssystem har betydelse. Viktfördelningen och väggreppsskillnader är sådant som kan förändras under körning och då påverkas alltså över- och understyrningsegenskaperna. Ett
minskat väggrepp på bakhjulen i förhållande till framhjulen gör fordonet mer överstyrt. Därför kan ett fordon som i grunden är understyrt i vissa situationer tillfälligt bli över-styrt, som exempelvis vid acceleration eller bromsning i kurva. Lastöverflyttning från bakaxel till framaxel (vilket inträffar vid bromsning eller släpp på gasen) gör att bak-hjulen får mindre grepp. Ett annat exempel är gaspådrag med en bakhjulsdriven bil, där de ökade drivkrafterna på bakhjulen leder till minskat grepp i sidled för bakdäcken. Även lokala variationer i vägens friktion kan påverka. Exempelvis vid körfältsbyte där en snö/is-sträng separerar vägbanorna kommer fram- och bakhjul att tillfälligt ha olika väggrepp. Isfläckar i en kurva är ett annat exempel.
För att kunna sätta ett mått på hur mycket ett fordon överstyr i en given situation be-höver vi införa en del definitioner och matematiska samband. Se Gillespie, 1992 och Wennerström et al., 1999 för en mer ingående beskrivning. Betrakta ett fordon som kör i en cirkel med radien R med konstant hastighet v, se figur 3.
Figur 3 Cirkelkörning.
Fordonets hastighet v är riktad i cirkelns tangent. För att följa cirkelbanan krävs en acceleration a riktad in mot cirkelns mitt. Accelerationen är entydigt bestämd genom
R v a
2
(1)
Samtidigt så utför fordonet en rotation kring sin vertikalaxel. Denna kallas girrotation
och girrotationens hastighet, kallad girrotationshastighet, betecknas . Då fordonet har
kört ett varv i cirkeln har det samtidigt roterat precis ett varv kring sin egen vertikalaxel, vilket ger att
.
v
ψ
a
14 VTI rapport 708
Ett fordon som kan följa cirkeln i hög hastighet kommer att ha en hög rotationshastig-het, vilket innebär att girrotationshastigheten i sig inte är ett bra mått på huruvida fordonet tappat kontrollen och överstyr.
Kombineras ekvation 1 och 2 så får man ett samband mellan acceleration och girrota-tionshastighet
v
a (3)
Figur 3 kan vara missvisande för det generella fallet då den illustrerar ett fordon med fronten riktad i rörelseriktningen. I praktiken kommer fordonet i de flesta fall att ha en annan riktning än rörelseriktningen (dvs. riktningen på hastigheten). När accelerationen är låg, vilket innebär stor cirkelradie eller låg hastighet, så kommer fronten att vara riktad ut från cirkeln. När hastigheten ökar så kommer fordonets bakända att driva ut för att bakhjulen ska kunna alstra större acceleration in mot cirkelns mitt, vilket gör att fronten blir riktad in i cirkeln. Detta illustreras i figur 4. Vinkeln mellan fordonets riktning och hastighet benämns slipvinkel β. Varje fordon har en gräns för hur stora slipvinklar det kan hantera innan det tappar kontrollen. Denna maximala slipvinkel varierar mellan olika fordon så slipvinkeln är inte absolut mått på hur nära ett fordon är att tappa kontrollen.
Figur 4 Stationär cirkelkörning vid låg hastighet (vänster) med positiv slipvinkel β och vid hög hastighet (höger) med negativ slipvinkel β.
För att se hur ovanstående koncept relaterar till överstyrning så är det vanligt att an-vända den så kallade cykelmodellen (Gillespie, 1992). I den så ersätter man fordonets fram- och bakaxel med var sitt hjul. Stationär cirkelkörning med cykelmodellen illustreras i figur 5. Fordonets masscentrum följer cirkelbanan med hastigheten v. Då fordonet också har en girrotation så skiljer sig hastigheten för fram- och bakhjul från
hastigheten i masscentrum. Detta innebär att framhjulet har en egen slipvinkel αf och
bakhjulet har på samma sätt en slipvinkel αb.
v
β
v
Figur 5 Cykelmodellen vid stationär cirkelkörning.
Man kan visa att för stationär cirkelkörning gäller att
För ett överstyrt fordon är αf < αb
För ett understyrt fordon är αf > αb
För ett neutralstyrt fordon är αf = αb.
Problemet är att hitta ett mått på hur mycket ett fordon överstyr i en given icke-stationär
situation, som exempelvis vid en undanmanöver. Det är tänkbart att skillnaden αb –αf
skulle kunna vara ett bra mått på hur mycket ett fordon överstyr även för icke-stationära förlopp. Tyvärr är det svårt rent mättekniskt att göra tillräckligt noggranna mätningar av slipvinklarna för fram- och bakhjul (speciellt framhjulet). Fordonets slipvinkel i mass-centrum, β, är lättare att mäta och ett resultat från cykelmodellen är att
b
R
b
(4)
där b är avståndet mellan fordonets masscentrum och bakaxel (Gillespie, 1992). På underlag med hög friktion kan lastöverflyttningar göra att masscentrum förflyttas vid olika manövrar. På riktigt halt underlag är lastöverflyttningarna små vilket innebär att b är relativt konstant för ett och samma fordon. Därmed finns ett direkt samband mellan fordonets slipvinkel i masscentrum och bakhjulets slipvinkel. Detta är intressant då en för stor slipvinkel på bakhjulet leder till förlorad kontroll med spin-out som följd. Genom att använda ekvation 1 kan ekvation 4 skrivas om till
) ( 2 v a b b (5)
v
β
α
fα
b16 VTI rapport 708
olika stora slipvinklar αb innan de börjar tappa greppet. Detta framgår tydligt i figur 6
som visar uppmätta sidofriktionskrafter för tre olika däck på blank is. För det odubbade vinterdäcket (grön) och allseason-däcket (röd) så finns en klar gräns vid ca 3 graders slipvinkel där friktionskrafterna minskar när slipvinkeln ökas ytterligare. För dubb-däcket (blå) så ökar däremot friktionskraften med ökad slipvinkel ända upp till 20 grader.
Figur 6 Sidofriktionens (friktionskraft/normallast) beroende av slipvinkel för tre olika typer av däck på blank is. Från Hjort, 2005.
Det mest lovande måttet får vi genom att betrakta överstyrning som en situation där fordonet roterar onormalt snabbt, dvs. att girrotationshastigheten är onormalt stor i förhållande till fordonets sidoacceleration. Det normala förhållandet antas råda vid stationär cirkelkörning, dvs. ekvation 3. Vi inför därför följande definition för över-styrning under en icke-stationär manöver:
Fordonet överstyr om v ay
Fordonet understyr om v ay
där ay är fordonets sidoacceleration i masscentrum. Sidoacceleration används istället för
den totala accelerationen för att exkludera den inverkan som bromskrafter (t.ex. motor-broms) kan ha på accelerationen. Den relativa skillnaden kan användas som ett nume-riskt mått på hur kraftig överstyrning som uppkommit genom manövern vid en given tidpunkt. y y ö a a v M (6)
2.3
Testmetod för maximal överstyrning
Standardtestet för att mäta ett fordons under- eller överstyrningsegenskaper är stationär cirkelkörning. Detta test fångar dock inte upp de tillfälliga förändringar av ett fordons egenskaper som kan ske under en manöver. I USA har National Highway Traffic Safety Administration (NHTSA) tagit fram en testmetod för att kunna avgöra om ett fordon är utrustat med ett antisladdsystem (NHTSA, 2007). Testet använder sig av en manöver kallad ”sine-with-dwell” som är utprovad i syfte att försätta ett fordon i en situation med
0 5 10 15 20 0 0.05 0.1 0.15 0.2 Slipvinkel (deg) S tyr fr ik ti o n ( y ) Dubbdäck Friktionsdäck Terräng/allseason-däck
extremt mycket överstyrning. Manövern utförs på högfriktionsunderlag (asfalt) och initialt framförs fordonet rakt fram utan rattvinkel vid en fart av 80 km/h. En styrrobot vrider sedan ratten enligt ett specificerat mönster, se figur 7. Ratten vrids först en bestämd rattvinkel (benämnd rattvinkelamplitud) åt ena hållet och sedan snabbt mot-svarande rattvinkel åt andra hållet, där den hålls konstant under en halv sekund innan ratten vrids tillbaka till nolläget.
Figur 7 Rattvinkelutslaget för en sine-with-dwell manöver.
Sine-with-dwell (swd) liknar en situation där föraren tvingas till en hastig omkörning i en högerkurva. Det finns dock en stor skillnad mellan robottestet och ett motsvarande test med förare som gör en undanmanöver i kurva: i swd-testet så är syftet inte att följa en förutbestämd väg. I praktiken kommer olika fordon att följa olika vägbanor, så kallade trajektorier. Istället så tittar man på vad som händer efter det att ratten har vridits tillbaka till nolläget. Styrmanövern har resulterat i att fordonet har en hög girrotations-hastighet när ratten återställts till neutralt läge. Med noll styrvinkel kommer fordonet att motverka girrotationen för att efter en tid uppnå ett stabilt läge utan girrotation och
fordonet färdas då rakt fram1. För små värden på rattvinkelamplituden uppnås noll
girrotation på ett par tiondels sekunder efter återställning av ratten. När rattvinkeltuden ökas så resulterar manövern i än mer överstyrning och vid tillräckligt stora ampli-tuder leder detta till en spin-out där girrotationshastigheten förblir hög ett flertal
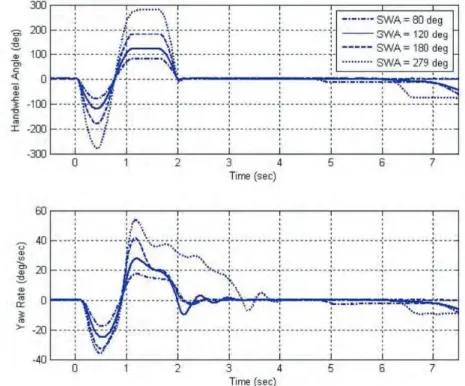
sekunder efter återställning av ratten. Detta illustreras i figur 8, som visar resultat från sine-with-dwell med ett fordon utan antisladdsystem. Om fordonet har ett antisladd-system så kan den för höga girrotationshastigheten effektivt minskas genom att applicera bromsverkan på ett yttre hjul och spin-out kan undvikas även för stora ratt-vinkelamplituder, se figur 9.
I NHTSA:s test har man satt ett krav på hur snabbt girrotationshastigheten måste minska efter det att ratten återställts till nollvinkel. Kraven är satta så att ett fordon utan funger-ande antisladdsystem knappast kan uppfylla dessa. Testet i sig säger dock inget om hur mycket överstyrning som genererats, utan är endast gjort för att skilja fordon med
anti--0.5 0 0.5 1 1.5 2 2.5 -Amplitud Amplitud Tid (s) R at tv ink el 500 ms
18 VTI rapport 708
väldigt låga girrotationshastigheter skulle skapas under manövern. Man har därför också infört ett krav på styrförmågan vilket innebär att fordonet måste förflytta sig en minimi-sträcka i sidled under manövern.
Figur 8 Sine-with-dwell test med ett fordon utan antisladdsystem för olika stora rattvinkelamplituder (SWA).Övre grafen visar rattvinkelutslag och undre grafen den resulterande girrotationshastigheten. Från NHTSA:s tester (NHTSA. 2006).
Figur 9 Sine-with-dwell test med ett fordon med antisladdsystem för olika stora rattvinkelamplituder (SWA).Övre grafen visar rattvinkelutslag och undre grafen den resulterande girrotationshastigheten. Från NHTSA:s tester(NHTSA, 2006).
För att testa hur mycket överstyrning som kan åstadkommas på halt underlag så som is och snö så har vi utgått från sine-with-dwell manövern då den visat sig vara effektiv för att framkalla överstyrning på underlag med hög friktion. Problemet med låg friktion är att fordonet tenderar att inte styra alls om ratten vrids med för hög hastighet. På låg friktion så kommer dessutom lastöverflyttningar att vara små. Det är därför en relevant fråga huruvida det ens är möjligt att åstadkomma en överstyrningssituation på riktigt halt homogent underlag med ett understyrt fordon (även utan antisladdsystem) endast genom att applicera styrning. Det går givetvis att framkalla överstyrning med speciella knep som att låsa bakhjulen med handbromsen eller att släppa gasen vid precis rätt till-fälle under styrning. Vi är dock intresserade av en testmanöver som är enkel att utföra och som innebär ett bredare test än nämnda specialfall.
Vi utförde datorsimuleringar med fordonsmodellerna från VTI:s körsimulator för att få en uppfattning om det går att få överstyrning på ett homogent isunderlag med sine-with-dwell manövern. Fordonsmodellen beskriver en Volvo S40 och är validerad inom det linjära området, vilket innebär manövrar som inte ligger på gränsen till fordonets hand-lingförmåga. För mer extrema manövrar på underlag med låg friktion så är det främst däckmodellerna som måste justeras, då lastöverflyttningar och eventuella fordonskräng-ningar antas vara små. Simuleringar med fordonsmodellen kan använda olika däck-modeller, anpassade för ändamålet. Vi använde relativt enkla däckmodeller och resul-taten från simuleringarna visade på att det går att få kraftig överstyrning med en sine-with-dwell manöver med ett fordon utan antisladdsystem. Däckmodellerna var inte tillräckligt avancerade för att kunna simulera ett fordon med antisladdsystem, vilket egentligen inte var nödvändigt. Den exakta utformningen av testet skulle ändå behöva göras vid fälttesterna. Resultaten från datorsimuleringarna beskrivs närmare i bilaga 2. Från de första fälttesterna insåg vi att sine-with-dwell manövern behövde modifieras för att kunna framkalla maximalt med överstyrning. En förare fick utföra en styrsekvens liknande sine-with-dwell och prova sig fram hur ratten skulle vridas för att framkalla spin-out. Alla rattvridningar tillsammans med fordonets respons registrerades i logg-datorn och analyserades. Det framkom tydligt att det första rattutslaget inte fick vara för stort eller för hastigt, medan den andra delen av styrmanövern skulle vara hastigare och använda större rattvinklar. En typisk styrmanöver med den modifierade sine-with-dwell manövern visas i figur 10.
0 50 100 150 200 S ty rv ink el ( g ra der)
20 VTI rapport 708
De röda vertikala linjerna i figuren markerar manöverns två olika delar. Styrutslaget i den första delen kan beskrivas med två parametrar, amplitud och frekvens. Styrutslaget i den andra delen beskrivs med en annan amplitud och frekvens. Dwell-tiden har vi låtit vara fix, 0,5 sekunder (dvs. samma som i original sine-with-dwell manövern). Detta ger totalt fyra parametrar som definierar manövern. För att uppnå maximal överstyrning så måste parametervärdena tas fram genom att prova sig fram, och de beror på underlagets friktion, däcken och vid vilken hastighet testet utförs. Givetvis beror de också på vilket fordon som används, men i denna studie har vi endast använt ett och samma fordon. Parametrarna kan bestämmas genom följande procedur:
1. Bestäm parametrar a1 och f1, dvs. amplitud och frekvens för första delen så att
fordonet är så nära understyrning som möjligt utan att faktiskt understyra.
Använd ekvation 6 för att beskriva huruvida understyrning inträffar (dvs. Mö<0)
2. Bestäm parametrar a2 och f2, dvs. amplitud och frekvens för andra delen så att
fordonet överstyr så mycket som möjligt. Använd ekvation 6 för att beskriva huruvida överstyrning inträffar
3. Håll parametrar a2 och f2 konstanta och justera parametrar a1 och f1 så att
fordonet överstyr så mycket som möjligt.
Typiska värden på parametrarna var i vårt fall a1 = 20–40 grader, f1 = 0,2–0,3
Hz, a2 = 160–220 grader, f1 = 0,3–0,5 Hz.
Man kan tänka sig en mer generell manöver som innefattar en dwell även under första
delen. En sådan manöver skulle då få ytterligare två parametrar d1 och d2, dvs.
dwell-tiderna för de båda delarna. Vi hade dock inte möjlighet att testa denna mer generella metod utan använde oss uteslutande av fyra parametrar.
För våra jämförande tester mellan olika däck så ställde vi in parametrarna för det däck med förmodat sämst sidgrepp. Samma parametrar användes sedan för alla däcken, vilket innebar att de utsattes för precis samma styrmanöver. Genom att basera parametrarna på det sämsta däcket så kunde även däcken med bättre grepp genomföra styrmanövern utan att understyra under första delen av manövern. Manöverparameterna varierade naturligt-vis för de olika underlagen.
Mätdata från tre typiska utfall av testmanövern visas nedan. En situation med måttlig överstyrning visas i figur 11. Sidoaccelerationen och girrotationshastigheten*hastig-heten är uppskalade för att fylla figuren. Den gråmarkerade arean markerar den del där överstyrning inträffar enligt vår definition. Fordonets slipvinkel stiger till ett max på knappt 15° strax efter att ratten återställts till nolläget, för att sedan snabbt minska. Cirka 2,5 sekunder efter att ratten återställts är sidoacceleration och girrotationshastig-het i praktiken noll vilket innebär att fordonet färdas rakt fram med full kontroll. Notera också att under den första delen av styrmanövern så är blå och grön kurva nästan
identiska vilket innebär att fordonet varken under- eller överstyr under denna del, precis som önskat.
En situation med kraftig överstyrning vilken leder till spin-out visas i figur 12. Notera hur slipvinkeln kontinuerligt ökar efter det att ratten återställts och når så stora vinklar att fordonet nästan roterat ett halvt varv (vilket motsvarar 180 graders slipvinkel).
Figur 11 Exempel på mätdata vid måttlig överstyrning.
Figur 12 Exempel på mätdata vid kraftig överstyrning med spin-out.
I figur 13 visas en situation där överstyrningen enligt vår definition upphör ett par sekunder efter det att ratten återställts, men där fordonets slipvinkel fortsätter att vara hög, över 20 grader (notera skalfaktorn), under ytterligare ett antal sekunder. Vi kallar detta beteende för powerslide och innebär att fordonet färdas framåt med uppställ vilket representerar en potentiellt farlig trafiksituation.
0 1 2 3 4 5 6 7 8 9-1 0 1 2 S id oac c /G ir rot *has t ( m /s 2) 0 1 2 3 4 5 6 7 8 9 -100 0 100 200 R a tt v ink el /S li pv in k el ( d eg) Tid (s) Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2) 0 2 4 6 8 10 12-1 0 1 2 S ido ac c /G ir ro t* h as t ( m /s 2) 0 2 4 6 8 10 12 -100 0 100 200 R at tv ink el /S li p v in k el ( d eg ) Tid (s) Rattvinkel (deg) Slipvinkel (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2)
22 VTI rapport 708
Figur 13 Exempel på mätdata vid powerslide. Slipvinkeln är uppskalad en faktor 10.
Baserat på detta har vi valt att titta på följande mått vid jämförelsen av hur de olika däcken presterar:
Överstyrningsfaktorn motsvarar arean av den gråmarkerade ytan i figurerna normerad med sidoaccelerationen i intervallet med överstyrning. Matematiskt är
detta integralen av Mö (från ekvation 6) över de intervall där v ay. Då Mö
blir stort för väldigt små värden på sidoaccelerationen har vi exkluderat de delar
där ay 0.1m/s2, vilket ger ett robustare mått. Normalt finns också en
tidsför-dröjning mellan ett fordons girrotationshastighet och den resulterande sido-accelerationen under ett transient förlopp som vid en rattvridning. Detta är naturligt och innebär inte att överstyrning har uppstått. För att inte inkludera denna transienta effekt i måttet så har vi satt den nedre integrationsgränsen till den tidpunkt där rattvinkeln har nått 70 % av den maximala rattvinkeln. Över-styrningsfaktorn är ett abstrakt mått vars storlek är svårt att direkt relatera till Maximalt uppnådd slipvinkel
Integrerad slipvinkel. Integralen beräknas från början på styrmanöverns andra del tills slipvinkeln återgått till noll grader
Integrerad farlig slipvinkel. Integralen tas över det intervall där slipvinkeln anses farligt stor. Det är inte helt lätt att bedöma vid vilken vinkel slipvinkel är farlig, då olika däck kan hantera olika stora slipvinklar innan fordonet tappar
kontrollen, men vi har utgått från en och samma vinkel, 5°, för alla däcken. Detta mått blir stort när en powerslide inträffar
Integrerad slipvinkel efter det att ratten återställts till noll grader
Tid från det att rattvinkeln återställts till dess att fordonet färdas rakt fram utan vare sig sidoacceleration eller girrotationshastighet.
Det första måttet är vårt direkta mått på hur mycket överstyrning som inducerats av manövern, medan de andra på något sätt representerar hur allvarlig konsekvensen av styrmanövern blev. 0 1 2 3 4 5 6 7 8 9 10 11 -1 0 1 2 S ido ac c /G irr ot *has t ( m /s 2) 0 1 2 3 4 5 6 7 8 9 10 11 -100 0 100 200 R at tv ink el /S li pv ink e l ( deg ) Tid (s) Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2)
Ett problem vid utförandet av våra tester har varit att testbanornas storlek var begränsa-de och att vi därför har varit tvungna att avbryta testkörningarna efter en viss tid för att inte köra av banan. Följden blev att speciellt de tre sista måtten ibland inte kunde be-räknas fullt ut för vissa testkörningar, vilket tydligt framgår av figur 12 och figur 13. Vi har dock valt att extrapolera data i de fall som slipvinkeln understigit 10° vid slutet av mätningen och där slipvinkeln minskat i sådan takt att det står klart att stabilitet hade uppnåtts ifall mätningen hade kunnat fortgå i ytterligare en sekund. Inspektion av mätfilerna visar att slipvinkeln minskar i princip linjärt med tiden i slutet av förloppet, så en linjär extrapolation har ansetts ge korrekta data på såväl integrerad slipvinkel som tid till stabilitet. För att bestämma det sista måttet har vi utifrån analys av de mätningar där mättiden räckt till antagit att sidoaccelerationen minskat till noll ca 0,2 sekunder efter att slipvinkeln blivit noll.
Ett annat problem, som rör testmetoden som helhet, är att däck med bra sidogrepp lyckas skapa en betydligt mer våldsam rotation på fordonet vilket ofta leder till större slipvinklar och längre återhämtningstider jämfört med däck med sämre sidogrepp. Det bästa däcket för detta test skulle vara ett med minimal förmåga att generera sidgrepp, vilket skulle resultera i att fordonet färdas rakt fram genom hela manövern utan att inducera någon överstyrning överhuvudtaget. NHTSA har löst motsvarande problem för sitt test genom att definiera en minsta sidledsförflyttning vid deras manöver. I vårt fall är det inte lika enkelt, då vi ställer in manöverns parametrar för att generera en första del av styrmanövern med bibehållen kontroll vilket gör att de olika däcken i praktiken leder samma rörelsemönster för fordonet under denna del.
För en rättvisare jämförelse mellan däckens benägenhet att försätta fordonet i en över-styrningssituation kan man tänka sig att skala ovanstående mått med hur mycket sido-acceleration fordonet lyckas uppnå under manövern. En sådan skalning kan motiveras med att framförande av ett fordon i en kurva vid en viss hastighet kräver en viss sido-acceleration och en korrekt jämförelse mellan däcken borde därför ske med en manöver som genererar samma sidoacceleration för alla däck.
Men då syftet med denna studie har varit att jämföra hur mycket överstyrning som går att uppnå med de olika däcken så väljer vi att inte göra någon sådan skalning, utan istället väga in detta i diskussionen om hur resultaten bör tolkas.
24 VTI rapport 708
3
Test: upplägg och genomförande
För testerna valdes ett bakhjulsdrivet fordon då ett sådant borde vara mer känsligt för överstyrning med vår manöver än ett framhjulsdrivet. Då manövern genomförs med släppt gas så kommer motorbromsen att göra att bakhjulen tappar sidledsstabilitet, vilket kan leda till överstyrning. Vi valde en Mercedes C200 kombi.
Figur 14 Testbilen.
3.1 De
testade
däcken
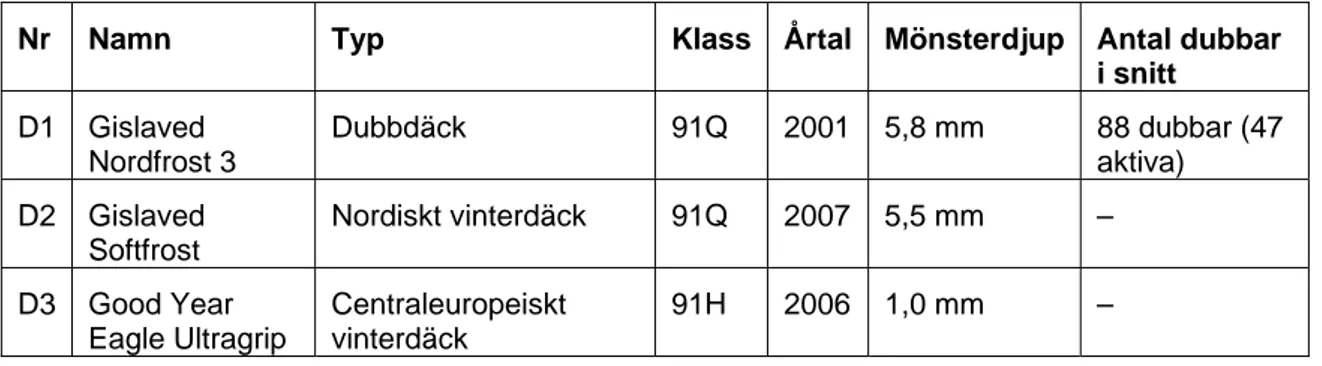
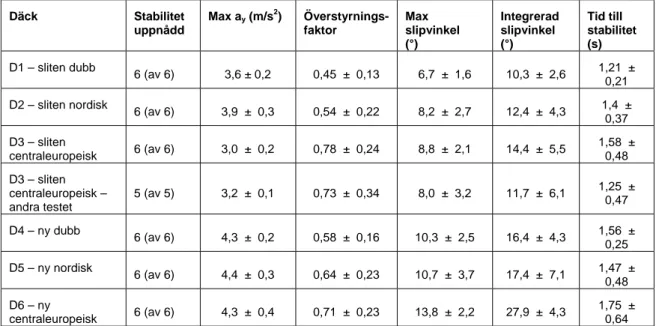
De vinterdäck som säljs i Sverige kan delas in i tre huvudgrupper: dubbdäck, odubbade vinterdäck utvecklade för nordiska förhållanden (här benämnt nordiskt vinterdäck) och odubbade vinterdäck utvecklade för centraleuropeiska förhållanden (här benämnt centraleuropeiskt däck). I denna studie tog vi med ett nytt och ett slitet däck av vardera kategorin. De testade däcken visas i tabell 1 och tabell 2. Av de slitna däcken så hade dubbdäcket och det nordiska vinterdäcket ett mönsterdjup på ca 6 mm, vilket är klart över lagkravet på 3,5 mm, men mindre än de nya däcken som hade ett mönsterdjup på ca 8–9 mm. Det slitna däcket av centraleuropeisk typ hade bara 1 mm mönsterdjup och var därför olagligt. Det slitna dubbdäcket var klart äldre än de andra däcken och trots att mönsterdjupet fortfarande var relativt stort så var dubbarna i väldigt dålig kondition. I snitt hade det endast 88 dubbar per däck, varav i snitt 47 kunde anses ha ett acceptabelt utstick, vilket kan jämföras med 130 dubbar för det nya däcket. Då det endast fanns 64 dubbar kvar i det däck som hade minst kvar jämfört med 102 dubbar i det däck som hade flest så är även dessa däck olagliga att använda då antalet dubbar inte får skilja mer än 25 % mellan däcken. De två däck med minst antal dubbar (64 respektive 84 st.) monterades på bakaxeln för att maximera fordonets överstyrning och därmed repre-sentera ”värsta fallet” scenariot. Däcken på framaxeln hade 101 respektive 102 dubbar. Om man räknar bort dubbar som är nedslitna och inte ger något grepp så är det ungefär lika många ”aktiva” dubbar per däck och i praktiken förväntade vi oss ingen extra överstyrning på grund av däckplaceringen.
Notera alltså att däck D1 och D3 inte är representativa för ett lagligt slitet dubbdäck respektive centraleuropeiskt vinterdäck. Det är dock tänkbart att sådana däck rullar på våra vägar och vi valde att ha med dessa två olagliga däckuppsättningar i testet för att få
stor spridning mellan de nya och slitna däcken. Bilder på däcken och mer detaljerad information om deras skick finns i bilaga 3.
De nya däcken kördes in på torr asfalt för att ta bort den ytbeläggning som finns på nya däck. Dubbdäcken kördes en sträcka på 125 mil från Linköping till Arjeplog vilket garanterar att dubbarna är ordentligt fixerade i däcket innan testerna. De två odubbade däcken kördes in på plats uppe i Arjeplog.
Tabell 1 Begagnade, slitna vinterdäck. Dimension 205/55-16.
Nr Namn Typ Klass Årtal Mönsterdjup Antal dubbar
i snitt D1 Gislaved Nordfrost 3 Dubbdäck 91Q 2001 5,8 mm 88 dubbar (47 aktiva) D2 Gislaved Softfrost Nordiskt vinterdäck 91Q 2007 5,5 mm – D3 Good Year Eagle Ultragrip Centraleuropeiskt vinterdäck 91H 2006 1,0 mm –
Tabell 2 Nya vinterdäck. Dimension 205/55-16.
Nr Namn Typ Klass Årtal Mönsterdjup Antal dubbar
i snitt D4 Gislaved Nordfrost 5 Dubbdäck 91T 2008 8,8 mm 130 dubbar (130 aktiva) D5 Nokian Hakapelitta R Nordiskt vinterdäck 94H 2008 9,0 mm –
D6 Zetex Ice Plus S100
Centraleuropeiskt vinterdäck
91H 2009 7,5 mm –
Det är viktigt att notera att vår studie inte är ämnad att jämföra de specifika däckmärken eller modeller som använts i testet. Då vi bara har ett däck av varje sort kan vi inte heller dra generella slutsatser om de olika kategorierna av däck. Denna studie ska ses som en pilotstudie för att ge svar på några grundläggande frågor (se resultatavsnittet) och för att förhoppningsvis kunna fånga upp trender när det gäller överstyrning mellan de olika typerna av däck, likväl som nya och slitna. Vi ansåg det därför inte nödvändigt att mäta upp mer detaljerad information om däcken, som exempelvis gummihårdhet och dubbutstick.
3.2 Testutrustning
3.2.1 Kör-robot26 VTI rapport 708
applikationer (SAFER, 2009). Till exempel kan vi synkronisera två robotsystem vilket medför att vi kan genomföra en korsningskollision med en noggrannhet runt 5 ms. Kärnan i robotsystemet är realtidsdator från National Instruments. I denna ligger all funktionalitet som navigering och reglering. Lateralt navigerar systemet genom att följa frekvenssatt kabel som läggs ut där man vill att fordonet ska köra. Med hjälp av två antenner på fordonet så kan systemet känna av hur den ligger i förhållande till kabel. Longitudinellt positioneras fordonet genom att mäta sträckan med hjulpulsmätare på icke drivande hjul på fordonet.
I fordonet sitter det en motor på rattstången som kontrollerar rattvinkel. Denna har magnetkoppling vilket medför att vi kan koppla ur systemet när vi vill och då köra fordonet som vanligt. En linjärmotor sitter på gasreglaget, vilken drar eller trycker på gaspedalen beroende på det test som ska utföras. Broms sker med hjälp av tryckluft eller elmotor beroende på det test som ska utföras.
Varje test styrs av en förprogrammerad händelsematris där allt är kopplat till tid från start med steglängden 0,01 s (100Hz). För varje tidssteg talar programmet, t.ex. om den ska navigera, hur långt den ska ha förflyttat sig eller om den ska bromsa. I vissa test, som exempelvis däcktest, programmeras bara en rattrörelse och då är navigeringen avstängd.
Målet med systemet har varit att det ska var lätt att installera och inte påverka den som kör. Det ska gå att installera utan att det syns och det får inte påverka den passiva säkerhet i fordonet vilket är ett krav i krocktest. Idag använder vi främst systemet för: krockprovning, test av ESC, däcktest, autobroms, utvärdering av radarsensorer och test av system för körfältsvarning (EVALUE, 2010).
3.2.2 Mätutrustning
För mätning av fordonets hastighet, accelerationer och rotationer så har vi använt ett Racelogic Vbox-system. Det är ett gps-baserat system som mäter fordonets position och hastighet vid en frekvens av 100 Hz. Genom att koppla till en tri-axlig accelerometer och rotationsgivare kan det även mäta accelerationer och rotationer.
3.3 Testutförande
Testerna genomfördes under vecka 12 i mars månad 2010 på några av Colmis testbanor i Arjeplog. Här hade vi tillgång till tre olika testytor: en 60 meter bred och 1 500 meter lång bana med ruggad is, en 20 meter bred och 150 meter lång bana med polerad is samt en 120 meter bred och 2 000m lång bana med snöyta.
Vi utförde inga friktionsmätningar av ytorna med speciell friktionsmätutrustning. Där-emot så utförde vi ett antal bromssträckemätningar med jämna mellanrum för att kontrollera om friktionen varierade. Detta gjordes främst med vårt referensdäck, däck D3, men i några fall också med det nya dubbdäcket, däck D4, för att få en uppfattning om skillnaden i väggrepp mellan dessa två däck. Då tidsschemat var pressat gjordes inga bromssträckemätningar med de andra däcken. På den ruggade isen och på snöytan gjordes bromstester med en ingångshastighet på 70 km/h, och på den polerade isen användes en ingångshastighet av 50 km/h. Friktionen på ytan för ett specifikt däck bestämdes sedan utifrån medelretardationen av den del av inbromsningen där hastig-heten minskade från 80 % till 20 % av ingångshastighastig-heten. Retardationen var relativt konstant inom detta område.
Figur 15 Översiktsbild över några av Colmis testytor. Med tillstånd från Colmis.
I figur 16 visas den polerade isen, vilken var helt homogen över hela testytan. Frik-tionen på polerad is är väldigt känslig för temperatur och solljus. Typiska värden som vi mätte upp genom bromstester var 0,08–0,11 för däck D3 och 0,13–0,14 för däck D4. Den ruggade isen, se figur 17, var inte riktigt lika homogen över hela ytan som den polerade isen. Små högar med avhyvlade iskristaller låg utspridda över ytan. Detta inne-bar dock inget problem för våra tester då vi kunde välja en del av banan som var relativt homogen. För de flesta testerna var bromsfriktionen med däck D3 ca 0,28 vilket innebär en is med ganska bra grepp. Med däck D4 var friktionen då ca 0,38. Vid två tillfällen var friktionen på ytan avvikande med däck D3, dels ett lägre värde på 0,22, dels ett högre värde på 0,35. Generellt var friktionen på den ruggade isen högre än vad vi hade önskat. Idealt hade en halare is med friktion på ca 0,2 för däck D3 varit att föredra då det bättre representerar ”hal” is. En halkbana har exempelvis krav på bromssträcka vid bromsning med låsta hjul som motsvarar ett friktionstal på mellan 0,11–0,26 för att vara godkänd som trafikövningsplats (VVFS, 1999).
Snöytan, se figur 18, bestod i grund och botten av en ruggad isyta med ett förhållande-vis tunt lager lössnö. Isytan var aldrig blottlagd, men snön kunde ligga tjockare här och var. På så sätt var ytan inte helt ideal, men precis som på den ruggade isen kunde vi välja spår som var relativt homogena för våra tester. Bromsfriktionen med däck D3 låg mellan 0,27–0,32, vilket var jämförbart med den ruggade isen.
28 VTI rapport 708
Figur 16 Den polerade isytan.
Figur 18 Snöytan.
Däcktester på is och snö är normalt väldigt beroende av konstanta väderförhållanden för att kunna göra rättvisa jämförelser mellan däcken. En vanlig procedur är att använda ett referensdäck som testas med jämna mellanrum. Resultaten från de andra testade däcken normeras sedan med resultatet från det resultat med referensdäcket som utförts närmast i tid. En annan metod är att testa alla däcken samtidigt genom att köra flera testfordon i kolonn. Ordningen mellan fordonen varieras med jämna mellanrum för att balansera ut eventuella ordningseffekter. En variant av denna senare metod använde VTI i ett test av antisladdsystems påverkan av olika däck (Hjort och Andersson, 2009).
För testerna i denna studie så hade vi ingen möjlighet att testa alla däcken parallellt, utan de fick testas sekventiellt där däck 3 valdes som referensdäck. Referensdäcket testades i början och slutet av testupplägget. Då det är oklart hur de komplexa måtten på överstyrning från vår testmetod skalar med friktionen så har vi inte använt däckets resultat för att normera de andra däckens resultat. Istället har vi använt referens-däckstesterna för att få en uppfattning om hur mycket testförhållanden har ändrats från början till slutet av testsekvensen.
Däck 3, det slitna vinterdäcket av centraleuropeisk typ, användes som referensdäck. De
fyra testparametrarna a1, f1, a2, och f2 provades ut för att ge maximal överstyrning för
just detta däck. Samma parameterinställningar användes sedan för alla de andra testade däcken. Genom att basera testinställningarna på det däck med förmodat sämst grepp så kunde vi vara relativt säkra på att parametrarna för den första delen av styrmanövern
30 VTI rapport 708
4 Testresultat
Här redovisas testresultaten från de tester som utfördes och ett antal representativa grafer från mätningarna presenteras. Grafer från varje enskild testkörning presenteras i bilaga 1. Ett antal olika testserier utfördes:
För att se hur effektiv vår manöver är på att framkalla överstyrning genomfördes en mindre serie tester med fordonets antisladdsystem avstängt. Endast tre repeti-tioner utfördes för varje testfall. För jämförelsens skull utfördes samma tester också med antisladdsystemet påslaget
För att testa manöverns robusthet med avseende på de aktuella måtten så utför-des en serie mätningar med referensdäcket på de olika underlagen. Drygt 20 repetitioner utfördes på varje underlag
En serie test med alla däcken på alla underlagen. Utfördes på natten vid låg temperatur (ca -20° till -25°)
En andra serie test med de tre nya däcken samt referensdäcket utförda på alla underlagen vid betydligt högre temperaturer jämfört med första serien (ca -4°). På grund av snöfall fick serien avbrytas efter tre testade däck och delades därför i två olika delar. A: test av de två odubbade nya däcken samt referensdäcket. B: test av det nya dubbdäcket samt referensdäcket.
Angående figurerna så är det viktigt att notera att girrotationshastighet*hastighet samt sidoacceleration skalats för att fylla varje graf, och deras storlek kan därför inte jäm-föras mellan olika grafer.
4.1
Jämförelse med och utan antisladdsystem
Ett test med och utan antisladdsystem utfördes på polerad is och ruggad is. Däcket med förmodat sämst isgrepp (D3, slitet centraleuropeiskt vinterdäck) och däcket med för-modat bäst isgrepp (D4, nytt dubbdäck) användes för denna jämförelse. Däcken testades enligt schemat i tabell 3. Testerna utfördes på kvällstid och temperaturen var mellan -23 och -25°C. Den ruggade isen var nypreparerad och hade hög friktion (µ=0,35 med däck D3) vid låga temperaturen. Den låga temperaturen gjorde att även den polerade isytan hade relativt hög friktion. (Friktionen på den polerade isen mättes inte vid detta tillfälle, men mätningar från föregående natt vid ungefär samma temperatur visade på µ=0,11 med däck D3.)
Tabell 3 Test med och utan antisladdsystem. Utfört 24 mars.
Däck Underlag Hastighet ESC Rep. Starttid Temp Friktion
D3 – sliten centraleuropeisk Ruggad is 70km/h Av 3 20:42 -23° µ=0,35 Ruggad is 70km/h På 3 Polerad is 30 km/h Av 3 Polerad is 30 km/h På 3 D4 – ny dubb Polerad is 30 km/h Av 3 22:54 -25° Polerad is 30 km/h På 3 Ruggad is 70km/h Av 3 Ruggad is 70km/h På 3
Tabell 4 Manöverinställningar för testet med och utan antisladdsystem.
a1 f1 a2 f2
Ruggad is 35° 0,25 Hz 220° 0,45 Hz
Polerad is 25° 0,20 Hz 180° 0,35 Hz
4.1.1 Polerad is
Typiska mätningar från testerna i tabell 4 på polerad is visas nedan i figur 19 och figur 20. För ökad tydlighet så har slipvinkeln skalats upp en faktor 10 i de grafer där ingen spin-out inträffar. Likaså har girrotationshastighet*hastighet samt sidoaccelera-tion skalats för att fylla ut figuren.
Vid testerna med däck D3 (slitet centraleuropeiskt) utan antisladdsystem så blir över-styrningen kraftig vilket resulterar i en spin-out. Vi konstaterar att med antisladd-systemet avstängt är det således fullt möjligt att åstadkomma en spin-out på ett homo-gent riktigt halt underlag med ett i grunden understyrt fordon endast genom att vrida på ratten och applicera motorbroms (dock ingen gasuppsläpps-manöver). Med antisladd-systemet påslaget så lyckas fordonet återfå kontrollen ca 6 sekunder efter att ratten återställts. Som mest skapas en slipvinkel på 15–25 grader.
Med däck D4 (nytt dubbdäck) utan antisladdsystem så blir överstyrningen mindre kraftig än för däck D3 med antisladdsystem. Fordonet återfår kontrollen ca 4 sekunder efter att ratten återställts. Som mest skapas en slipvinkel på 10–15 grader. Med anti-sladdsystemet påslaget så lyckas fordonet återfå kontrollen ca 2,5 sekunder efter att ratten återställts. Som mest skapas en slipvinkel på ca 15 grader.
Figur 19 Typiska mätkurvor för däck D3 på polerad is utan antisladdsystem (vänster) och med antisladdsystem (höger). Från mätningarna tabell 3. Notera olika skalning på slipvinkeln. 0 2 4 6 8 10 12-1 0 1 2 S idoac c /G irrot *ha s t (m /s 2) 0 2 4 6 8 10 12 -100 0 100 200 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D3 på polerad is utan antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2) 0 2 4 6 8 10 12-1 0 1 2 S idoac c /G irrot *ha s t (m /s 2) 0 2 4 6 8 10 12 -100 0 100 200 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D3 på polerad is med antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2)
32 VTI rapport 708
Figur 20 Typiska mätkurvor för däck D4 på polerad is utan antisladdsystem (vänster) och med antisladdsystem (höger). Från mätningarna i tabell 3.
.
4.1.2 Ruggad is
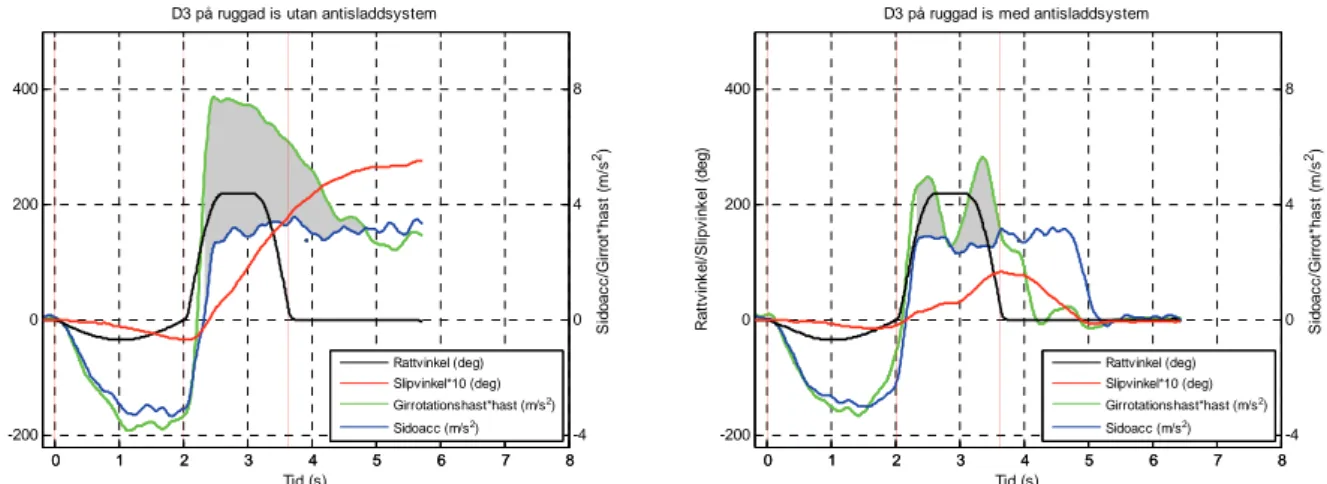
På den ruggade isen så hade vi på grund av högre hastighet och testbanans begräns-ningar tyvärr inte möjlighet att mäta lika lång tid efter att ratten återställts som på den polerade isen. För däck D3 utan antisladdsystem så lyckas fordonet inte återfå kontroll-en någon gång och allt tyder på att kontroll-en spin-out hade blivit följdkontroll-en ifall testerna hade kunnat förlängas ytterligare några sekunder. Maximal uppmätt slipvinkel är mellan 10–30 grader. Med antisladdsystemet aktiverat så motverkas överstyrningen effektivt på den kraftigt ruggade isen även med dessa nästan blankslitna däck. Fordonet lyckas då återfå kontrollen ca 1,5 sekunder efter det att ratten återställts. Den maximala slip-vinkeln håller sig under 10 grader. Det framgår också tydligt i grafen hur antisladd-systemet via ABS-bromsarna verkar i pulser vilket skapar två tydliga överstyrnings-toppar. Detta beteende återkommer i de flesta av våra tester med antisladdsystemet aktiverat.
För däck D4 utan antisladdsystem så leder manövern till kraftig överstyrning och spin-out med maximal slipvinkel större än 150 grader. Den skapade överstyrningen är
mycket kraftigare för de nya dubbdäcken än för de blankslitna centraleuropeiska däcken utan antisladdsystem. Det är alltså tydligt att på en isyta med hög friktion så är det fullt möjligt att med en kraftig styrmanöver framkalla överstyrning och spin-out även med nya dubbdäck. Med antisladdsystemet påslaget så motverkas överstyrningen effektivt och fordonet återhämtar kontrollen efter ungefär samma tid som för däck D3 med anti-sladdsystem. Maximal slipvinkel är dock något högre för däck D4.
En relevant fråga är varför de nya däcken med förmodat mycket bättre grepp än de gamla däcken resulterar i en mycket våldsammare överstyrning när antisladdsystemet är avstängt. Förklaringen är att däck D4:s bättre sidgrepp resulterar i en markant högre sidoacceleration när ratten vrids, vilket genererar en betydligt högre rotationshastighet
än för däck D3. Med däck D4 uppnås en maximal sidoacceleration på 4,4 m/s2 under
styrning, vilket är drygt 30 % högre än de 3,3 m/s2 som uppnås med däck D3. För att
lättare förstå vad en sådan ökning innebär kan man jämföra med fallet där ett fordon kör i kurva. Då sidoaccelerationen skalar med hastigheten i kvadrat så skulle en ökning från exempelvis 70 till 80 km/h resultera i 30 % ökning av sidoaccelerationen.
0 2 4 6 8 10 12-1 0 1 2 S idoa c c /G irrot *has t (m /s 2) 0 2 4 6 8 10 12 -100 0 100 200 R a tt v in k e l/ Sl ip v in k e l ( d e g ) Tid (s)
D4 på polerad is utan antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2 ) Sidoacc (m/s2) 0 2 4 6 8 10 12-1 0 1 2 S idoa c c /G irrot *has t (m /s 2) 0 2 4 6 8 10 12 -100 0 100 200 R a tt v in k e l/ Sl ip v in k e l ( d e g ) Tid (s)
D4 på polerad is med antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2
) Sidoacc (m/s2)
Figur 21 Typiska mätkurvor för däck D3 på ruggad is utan antisladdsystem (vänster) och med antisladdsystem (höger). Från mätningarna i tabell 3.
Figur 22 Typiska mätkurvor för däck D4 på ruggad is utan antisladdsystem (vänster) och med antisladdsystem (höger). Från mätningarna i tabell 3. Notera olika skalning på slipvinkeln.
4.1.3 Robusttest
För att testa manöverns robusthet med avseende på de aktuella måtten så utfördes en serie mätningar med referensdäcket på de olika underlagen enligt tabell 5. Testerna tog ca 25 minuter att utföra per underlag, vilket innebar att vädret var relativt oförändrat under genomförandet.
Tabell 5 Robusttest. Utfört 25 mars.
Däck Underlag Hastighet Repetitioner Starttid Temp Friktion
0 1 2 3 4 5 6 7 8 -4 0 4 8 S idoac c /G irrot *ha s t (m /s 2) 0 1 2 3 4 5 6 7 8 -200 0 200 400 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D3 på ruggad is utan antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2 ) Sidoacc (m/s2) 0 1 2 3 4 5 6 7 8 -4 0 4 8 S idoac c /G irrot *ha s t (m /s 2) 0 1 2 3 4 5 6 7 8 -200 0 200 400 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D3 på ruggad is med antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2 ) Sidoacc (m/s2) 0 1 2 3 4 5 6 7 8 -4 0 4 8 S idoac c /G irrot *ha s t (m /s 2) 0 1 2 3 4 5 6 7 8 -200 0 200 400 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D4 på ruggad is utan antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2) 0 1 2 3 4 5 6 7 8 -4 0 4 8 S idoac c /G irrot *ha s t (m /s 2) 0 1 2 3 4 5 6 7 8 -200 0 200 400 R a tt v in k e l/ S lip v ink e l (deg) Tid (s)
D4 på ruggad is med antisladdsystem
Rattvinkel (deg) Slipvinkel*10 (deg) Girrotationshast*hast (m/s2) Sidoacc (m/s2)
34 VTI rapport 708
Tabell 6 Manöverinställningar för robusttesterna.
a1 f1 a2 f2
Ruggad is 30° 0,25 Hz 200° 0,45 Hz
Polerad is 25° 0,20 Hz 180° 0,35 Hz
Snö 20° 0,25 Hz 200° 0,15 Hz
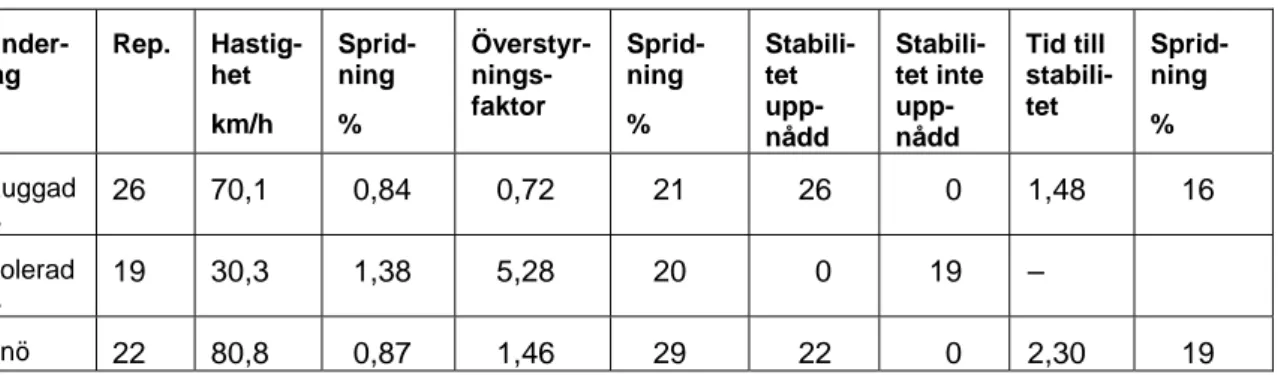
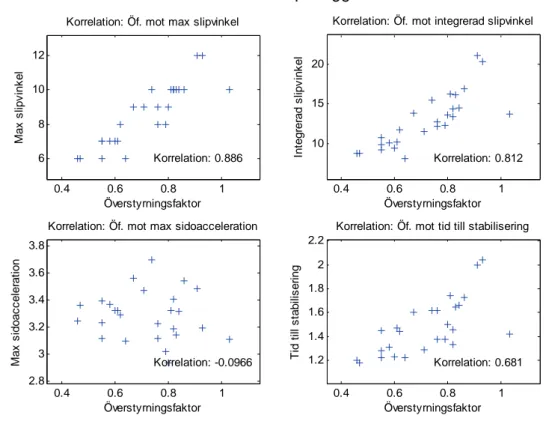
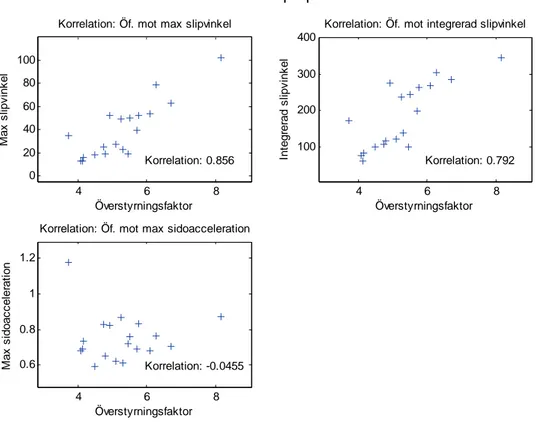
I tabell 7 till tabell 9 så listas medelvärden och spridning för de olika måtten som vi har studerat. Spridningen är standardavvikelsen dividerat med medelvärdet och anges i procent. Tid till stabilitet har beräknats för de fall där stabilitet uppnåtts. Vi konstaterar att:
Manövern kunde utföras med i princip samma ingångshastighet för alla repeti-tioner, spridningen är väldigt låg
Överstyrningsfaktorn skiljer mycket i storlek för de olika underlagen, där ruggad is verkar resultera i minst överstyrning medan polerad is resulterar i mest över-styrning. Spridningen ligger på ca 20 % procent för isunderlagen och 30 % för snö. Den större spridningen för snö kan bero på att den testytan var mindre homogen jämfört med isunderlagen
Stabilitet uppnåddes för alla repetitioner på ruggad is, medan ingen repetition på polerad is uppnådde stabilitet. På snö så uppnåddes stabilitet för alla repeti-tionerna
Sidoaccelerationen var något högre på snö än på ruggad is. Polerad is hade klart lägst sidoacceleration
För slipvinkelmåtten så var spridningen stor för alla måtten i de fall där stabilitet inte uppnåddes. När stabilitet uppnåddes så var spridningen mindre. Minst sprid-ning hade maximal slipvinkel (ca 20 %) och den integrerade slipvinkeln över hela intervallet (ca 25 %). De andra integrerade slipvinkelmåtten hade större spridning (ca 40 %).