M
ÄLARDALENU
NIVERSITYS
CHOOL OFI
NNOVATION,
D
ESIGN ANDE
NGINEERINGV
ÄSTERÅS,
S
WEDENHögskolingenjörsexamen inom Flygteknik 180p
A
NALYS AV GBAS SOM LANDNINGSSYSTEM JÄMFÖRT MED ILS OCHDERAS EFFEKTER PÅ SMÅ FLYGPLATSER
Dlovan Ali Amin
dlovan.a.a@live.com
dan16007@student.mdh.se
Examinator: Håkan Forsberg
Mälardalen University, Västerås, Sweden
Handledare: Kjell-Åke Brorsson
2
Förord
Jag vill tacka handledaren Kjell-Åke Brorsson för hans tips och råd under arbetet. Jag vill tacka Håkan Forsberg som examinator med sitt förslag som gett inspiration till detta
examensarbete. Jag vill även tacka andra personer, som hjälpt mig på ett eller annat sätt under arbetet.
3
Sammanfattning
I varje flygfas av en kommersiell flygrutt krävs att navigations- och inflygningshjälpmedlen klarar högt ställda krav på noggrannhet, kontinuitet, tillgänglighet och integritet. Befintliga ILS-landningssystem klarar inte alla de kraven. GBAS, som är en modern teknik, kan däremot uppfylla uppställda krav med hjälp av GPS-satellitsignaler och ge stöd för alla faser av
precisionsinflygningskategorier. GBAS-teknik kan ersätta ILS-tekniken och göra flygtrafiken säkrare under olika flygfaser. Systemet tillämpar konceptet "differentiella korrigeringar" för att förstärka GPS-satellitsignaler och överföra korrigeringar från GNSS-data till utrustade flygplan i närheten av en flygplats. Detta möjliggör att angränsade flygplatser kan förses med behövligt stöd och möjliggöra precisionsinflygningar upp till CAT III. Syftet med
examensarbetet har varit att analysera GBAS-system och dess effekter på en flygplats och jämföra det med ILS-system för att bedöma vilket som är bäst. Sedan om möjligt ge förslag på hur man kan rädda små flygplatser med hjälp av GBAS-teknik. Arbetet inleddes med informationsinsamling om systemets tekniska och operativa kriterier. Utifrån denna information skapades ett analysschema för att analysera skillnaderna mellan
landningssystemen. Resultaten av arbetet och analysschemat visar att GBAS-systemet bedöms vara mer ändamålsenligt med avseende på ekonomiska, tekniska och operativa förhållanden jämfört med ILS-systemet. Analyserna tyder också på att GBAS är ett bättre alternativ än ILS på små flygplatser och att man kan använda resultaten som verktyg för att identifiera olika problem med ILS-systemet.
4
Abstract
Nowadays we have two general rules for flight: VFR (Visual Flight Rules) and IFR
(Instrument Flight Rules). VFR can only be used according to visual flight rules, where the pilot always has visual contact with the ground. In low visibility conditions (such as fog, snow, low clouds level, rain and darkness) the pilot uses ILS (Instrument Landing System) to position the aircraft for approach and landing. Those situations at ILS are categorized into three different stages: CAT I, CAT II and CAT III. The categories are based on the sight (visibility conditions). ILS is sensitive to nearby radio signals from other devices and to buildings around the airport and cannot guide multiple aircraft simultaneously. At the same time the critical and sensitive areas of the ILS result in a reduction of the throughput under low-visibility conditions. In addition, the system is expensive and requires great maintenance. Another important disadvantage of this system is that it allows only straight approach (Not curved flying within landing and approach). Most of the airports’ landing systems have some inaccuracy and unreliability. It is due to older models and systems. Systems like ILS, VOR, TLS, MLS, GPS, GNSS, etc., have been constantly modernized and are used to reduce the risk of incidents and accidents during approach and landing phases which are crucial steps in the flight. However, the GPS (Global Position System) precision method cannot alone meet ICAO’s (International Civil Aviation Organization) requirements when additional accuracy, integrity, accessibility and continuity are required. In order to meet the ICAO requirements, one needs to strengthen the GNSS’s performance by using the GBAS system and
guaranteeing very high performance in a given coverage area such as, an airport. The current GBAS has already been certified for CAT1 and can be improved to ICAO requirements. CAT II / III has already been developed by the ICAO Navigation System Panel (NSP) but not yet appended to Annex 10 as an alternative to ILS. Annex 10 is an ICAO regulation that contains all standards and practices for aviation telecommunications. This thesis study provides an overall overview of the aircraft’s performance with different aids and specifies new landing system and compares with some of the existing systems. Limitations are studied in order to analyze the best available new system that can be achieved.
5
Nomenklatur
Förkortning Förklaring
ACI Airports Council International
ATC Air Traffic Control
BABS Blind Approach Beacon System
CAT Category
DME Distance Measuring Equipment
FAA Federal Aviation Administration
FAR Federal Aviation Regulation
FD Flight Director
GBAS Ground Based Augmentation System
GLONASS Global Navigation Satellite System
GPS Global Positioning System
GNSS Global Navigation Satellite System
HUD Head-Up Display
ICAO International Civil Aviation Organization
IFR Instrument Flight Rules
IFS Instrument Flight System
ILS Instrument Landing System
LAAS Local Area Augmentation System
LPV Localizer Performance With Vertical Guidance
MLS Microwave Landing System
NDB Non-Directional Beacon
RNAV Required Navigation
6
VFR Visual Flight Rules
VHF Very Hight Frequency
VOR VHF Omnidirectional Range
7
Innehållsförteckning
1
Inledning ... 9
1.1 Bakgrund ... 9 1.2 Problemformulering ... 10 1.3 Syfte ... 10 1.4 Avgränsningar... 112
Flygplatser och bansystem ... 12
2.1 Klassificering av flygplatser ... 12
2.2 Banor och bansystem ... 16
3
Landningssystem ... 18
3.1 Landningshjälpmedel ... 18
3.2 Flyginstrument ... 19
3.3 Kategorier och precisionsmetoder ... 19
3.4 Instrument Landing System (ILS) ... 20
3.4.1 Localizer VHF-Sändare ... 22
3.4.2 Glidbanesändare (Glidslope) ... 23
3.4.3 Markeringsfyrar (Mark Beacon) ... 25
3.4.4 Banbelysning ... 26
3.4.5 Begränsningar för ILS ... 27
3.5 Markbaserat Förstärkningssystem (GBAS) ... 28
3.5.1 Introduktion GBAS ... 28
3.5.2 GBAS funktioner ... 29
3.5.3 Fördelar med GBAS ... 30
4
Metod ... 33
4.1 Kvalitativa metoder ... 33
4.2 Kvantitativa metoder ... 33
4.3 Litteraturstudie och datainsamling ... 34
4.4 Analysmetoder ... 36
8
4.4.2 Innehållsanalys ... 37
4.4.3 Analysschema ... 38
5
Resultat och analys ... 39
5.1 Val av kategorier och kriterier för analysen ... 39
5.2 Analysschema för jämförelse mellan ILS och GBAS ... 39
5.3 Sammanställning av resultat ... 42
6
Diskussion ... 46
7
Slutsatser ... 48
9
1 Inledning
1.1 Bakgrund
Det sker en ständig utveckling av flygplan, flygplats- och landningssystem med hjälp av nya metoder och idéer om hur kommunikationen mellan flygplan och flygplatser ska bli så effektiv som möjligt. Om en flygplats saknar moderna landningssystem, begränsas
regulariteten och trafikflödet för de flygbolag som utnyttjar berörd flygplats. Det föreligger därmed ett behov av att utveckla nya landningssystem, vilket är svårt för små flygplatser som har begränsade resurser.
Ett av de mest utmanande och kritiska stadierna under en flygning är själva landningen. Flertalet olyckstillbud äger rum under landningsfasen, eftersom risken är hög att flygplanet driver av rullbanan eller kolliderar med andra flygplan. Det krävs alltså noggrannhet för att vägleda flygplanen exakt till sättningspunkten.
Olika landningssystem har olika processor och funktioner för att etablera kontakt mellan flygplanen och flygplatsen samt att visa rätt position, kurs, höjd, hastighet o.s.v. Flygplatsens storlek spelar stor roll för vilket system som kan användas. Alla flygplatser har någon form av landningssystem såsom ILS, MLS, LAAS, TLS, GPS, GBAS, vilka är beroende av
flygplatsens behov och tillgänglighet. GBAS-systemet är ett avancerat och noggrant
landningssystem, som har en felmarginal på mindre än en meter i de horisontella och vertikala planen. Detta ger mycket högt noggrannhet vid integration med CAT I, CAT II, CAT IIIA och CAT IIIB precisionsmetoder. För CAT IIIC har det ännu inte använts i luftfarten [1, s, 207].
Under flera decennier i början av 1900-talet var endast visuella landningsprocedurer möjliga. I oktober 1947 beslutade ICAO att ILS skulle bli det internationella landningssystemet vid IFR-trafik [2]. ILS används fortfarande som det vanligaste landningsstödet på världens flygplatser. Den används vanligtvis för precisionsinflygningar samtidigt som systemet kräver omfattande markytor och är känsligt för störningar från andra föremål nära flygplatser [2]. Det föreligger därmed ett behov av att utveckla nya landningssystem, vilket är svårt för små flygplatser som har begränsade resurser. Med modern flygledarteknik och nya
landningssystem kan man sänka kostnaderna avsevärt, vilket borde skapa förutsättningar för livskraftiga flygplatser över hela landet.
10 MLS (Microwave Landing System) är mycket mindre förekommande än ILS och håller på att avvecklas p.g.a. höga ekonomiska kostnader [3]. Precisionsmetoden PAR används i första hand i militära miljöer och kräver mer än ett system. LAAS och WAAS har sina
begränsningar inom storlek, ekonomi osv, vilket inte passar för små flygplatser. För att övervinna problemen försöker man konstruera nya lösningar för små flygplatser. Med små flygplatser avses de som har mindre verksamhet, kortare banor, lägre antal flygrörelser, vilket oftast resulterar i lägre intäkter av verksamheten. Fördelarna med små flygplatser kan vara bekvämlighet för resenärerna, bidra positivt till den lokala ekonomin, stimulera ökad turism samt bidra till inflyttning och ökad sysselsättning.
Varje system har dock sina begränsningar vad gäller precision. Nya landningssystemet GBAS skulle kunna bli ett intressant alternativ jämfört med de gamla systemen och passa små
flygplatser.
1.2 Problemformulering
Landningssystem behövs för att utföra flygrörelser, kommunikation och ge stöd för piloterna för navigering vid flygning i väder med nedsatt sikt. Det är svårt för små flygplatser att klara konkurrensen när de inte har tillräckligt med utbyggda system, som krävs för att ta emot flygplan vid låga sikt- och molnhöjdsvärden såsom kategori II och III då sikten är obefintlig. Detta innebär att flygbolag blir tvungna att omdirigera sina flygplan till stora flygplatser (alternativa flygplatser) med högre kostnader och andra utgifter som följd. Om en flygplats saknar moderna landningssystem, begränsas regulariteten och trafikflödet för de flygbolag som utnyttjar berörd flygplats och det leder i sin tur till lägre intäkter.
• Den centrala frågan är i vilken grad ett GBAS landningssystem skulle kunna lösa ovanstående ekonomiska, tekniska och miljörelaterade problem.
1.3 Syfte
Minimivärden för säker inflygning och landning enligt ILS-CAT II och CAT III vid dåligt väder på små flygplatser, ställer krav på omfattande investeringar. Med hjälp av ny teknik bör dessa kunna minimeras, vilket även bör gälla för underhållet. Huvudsyftet med arbetet är att analysera för- och nackdelar med det nya GBAS-systemet relaterat till det befintliga ILS-systemet. Delsyften är:
11 • att kartlägga de vanligaste landningssystemen.
• att analysera förutsättningarna för nya, framtida landningssystem och deras effekter på små trafikflygplatser.
1.4 Avgränsningar
Utvecklingshistorien för landningssystem börjar med en presentation av det gamla systemet. Eftersom arbetet i huvudsak handlar om det nya, undviks därför mindre detaljer om det gamla systemet och arbetet fokuseras istället på utvecklingen av nya landningssystem.
12
2 Flygplatser och bansystem
2.1 Klassificering av flygplatser
En flygplats är en plats (ett markområde) med en eller flera banor från vilken
flygplansrörelser äger rum för landning och start med flygplan, oavsett om det är flygfrakt, passagerare eller/och militär verksamhet. Begreppet flygplats omfattar kommersiella flygplatser, militära flygbaser och allmänflygfält som har uppfyllt vissa certifieringar eller reguljära föreskrifter. Enligt ICAO är en flygplats ”A defined area on land or water (including any buildings, installations and equipment) intended to be used either wholly or in part for the arrival, departure and surface movement of aircraft.” [4, s. 1-2].
Det finns flera kriterier som påverkar ovan definition för hur man definierar en stor flygplats [5, s. 2-3]:
• Trafikvolym: Flygplatsens storlek är avgörande för hur stora trafikvolymer och flygrörelser som är möjliga att hantera. Detta bestämmer i sin tur vilka kommersiella operatörer som väljer att etablera verksamheter inom passagerartrafik, charter och flygfrakt på flygplatsen.
• Nattrafikvolym: Stora flygplatser har ofta nattrafik för flygfrakt. UPS är ett exempel på fraktoperatör som skickar frakter under natten för att delas ut dagen efter. Detta för att undvika stora trafikvolymer under dagtid.
• Dagtrafikvolym: Dagtidsflygningar är mer populära bland passagerare och då särskilt affärsmän och turister som föredrar dagtrafik framför sen nattrafik. Flygplatser för främst passagerarflyg har störst trafikvolym under dagen.
• Flygplanstorlek: Stora flygplatser med utbyggda ramputrymmen samt flera långa och breda rullbanor kan ta emot stora flygplan såsom Boeing 747, Airbus 380.
Det finns två typer av trafikflygplatser, dels kontrollerade flygplatser med kontrollerat luftrum, dels andra icke kontrollerade flygplatser utan kontrollerat luftrum. De icke kontrollerade använder AFIS (Aerodrome Flight Information Service), som endast lämnar information om väderförhållande och annan flygtrafik till startande och landande flygplan.
År 2018 fanns totalt 248 flygplatser i Sverige [6, s. 3]. ”I dag är det svenska flygplatssystemet omfattande, med totalt 38 flygplatser med reguljär trafik i form av linjefart och chartertrafik, i ett nät som täcker stora delar av landet. Det finns också 8 trafikflygplatser utan reguljär
13 trafik.” [7, s. 65] Av de 38 kommersiella flygplatserna drivs 10 av statliga Swedavia och resten är kommunala och/eller privatägda. Stockholm-Skavsta ägs till 9,9 % av Nyköpings kommun och till 90,1 % av franska bolaget Vinci Airports sedan 2018 [8]. SAAB-Linköping flygplats är privatägt med visst kommunalt stöd. Ängelholm och Ljungbyhed flygplats är privatägda av PEAB. Se figur 1. Flygplatssystemet är inte statiskt utan förändras med avseende på antal och ägande.
14 I Sverige finns för närvarande 45 flygplatser, som är utrustade med någon form av hjälpmedel för instrumentinflygning och som är godkända av Transportstyrelsen. Därutöver finns tre godkända flygplatser som inte har någon radionavigeringsutrustning och som därför endast kan användas vid bra väder. Utöver de godkända flygplatserna i Sverige finns det också mindre flygplatser som bland annat används av flygklubbar eller enskilda personer. [10].
Goda kommunikationer och tillräcklig information behövs mellan flygplats och flygplan inför start, flygning och landning. Olika flygplatser (stora och små) använder olika system för landning enligt deras behov och kapacitet för att ge stöd för piloterna för navigering vid flygning i väder med nedsatt sikt.
För civil flygtrafik finns tre typer av flygplatser i Sverige: godkända civila flygplatser, icke godkända civila flygplatser och militära flygplatser där civil trafik medges. I Sverige måste flygplatser vara godkända av Transportstyrelsen [10]. För att en flygplats ska godkännas som trafikflygplats måste godkänd flygtrafikledningstjänst utfärdad av Transportstyrelsen finnas. Med trafikflygplats menas en flygplats med reguljär och affärsmässig trafik.
Exempel på stora flygplatser i Sverige är Stockholm-Arlanda som under 2019 totalt hade 116 529 landningar och 25 642 623 passagerare [11]. Se tabell 1. Och under 2018 hade flygplatsen 26,8 miljoner passagerare [12].
15 Tabell 1: Swedavias flygplatsstatistik under 2019.
Källa: [11].
Fördelar med lokala små flygplatser är att de stärker den lokala ekonomin och ger turismen ökad bekvämlighet och kortare tid till det område som ska besökas. Små flygplatser skiljer sig från stora flygplatser på följande sätt [5, s. 3]:
• Storleken på flygplats och flygplan: Flygplanen kan vara propeller eller jet och på små flygplatser används mest små propellerdrivna flygplan. Generellt har små flygplatser markant mindre flygtrafik än större flygplatser.
• Flygplatstjänster: Små flygplatser tillämpar normalt kombianställningar för anställd personal, d.v.s. varje person utför ett antal olika arbetsuppgifter. Syfte är att reducera sina utgifter. Service i form av underhåll, bränsle och tankning utförs i förekommande fall av olika företag som är etablerade på flygplatserna. Många små flygplatser
erbjuder också flygutbildning via flygskolor. Flygverksamheten vid flygskolorna innebär normalt många flygrörelser, som oftast utförs av oerfarna piloter.
Storflygplatserna tillåter i regel inte denna typ av flygverksamhet, vilken därför företrädesvis förläggs till små flygplatser.
Flygplatsstatistik 2019
Landningar Passagerare totalt Linjefart och charter Totalt¹ Linjefart och charter
Dec %² Jan-Dec %² Dec %² Jan-Dec %² Dec %² Jan - Dec %²
Bromma Stockholm 1 673 -11 23 269 -6 1 869 -10 27 840 -6 175 084 -4 2 352 517 -6 Göteborg Landvetter 2 367 -6 33 066 -5 2 466 -6 34 674 -5 466 226 0 6 670 892 -2 Kiruna 123 -4 1 445 -2 169 -5 2 332 -6 25 565 3 267 941 -3 Luleå 386 -10 5 427 -8 532 0 7 708 -11 86 810 -3 1 162 314 -3 Malmö 795 -12 11 429 -14 1 131 -13 18 676 -7 139 952 -8 1 975 479 -8 Ronneby 152 -3 2 022 -4 234 -18 3 713 -42 15 771 -4 204 678 -9 Stockholm Arlanda 8 182 -7 114 801 -4 8 333 -7 116 529 -4 1 806 247 -4 25 642 623 -4 Umeå 480 -13 6 111 -18 664 -10 10 152 -13 75 276 -5 960 351 -7 Visby 298 1 4 780 -4 459 1 8 366 -3 26 396 1 446 764 -5 Åre Östersund 202 -34 3 501 -8 302 -21 5 284 0 35 102 -14 473 497 -8 Totalt 14 658 -8 205 851 -6 16 159 -8 235 274 -6 2 852 429 -4 40 157 056 -4
¹ Linjefart, chartertrafik samt övrig trafik
16 • Flygplanstyper: Små flygplatser är mer benägna att låta charterflygbolagen etablera
sig. Dessa flygbolag tar flygresenärer till platser som linjeflygtrafiken normalt inte trafikerar. Charterflygbolagen står i allmänhet endast för några få ankomster och avgångar per dag.
2.2 Banor och bansystem
En flygplats kan ha en eller flera rullbanor beroende på antalet flygrörelser. Tabell 2 visar bandimensioner på Stockholm-Arlanda som ett exempel på banstorlekar.
Tabell 2: Stockholm-Arlanda flygplats. Rullbanornas dimensioner.
Källa: [13, s. 39]
Rullbanorna byggs i en systemform som antingen är parallella, i kryss- eller stjärnform. Se figur 2. Vid parallella systemformer anläggs banorna med minst 1035 m inbördes avstånd mellan dem för att säkerställa oberoende landningar och starter. Orsaken till dessa olika systemformer är att de äldre flygplanen var mycket känsliga för sidvind. I banändarna finns beteckningar med siffror som anger kompassriktningar (magnetisk) i deka-grader för aktuell banriktning (28 för 280°). Efter siffrorna finns bokstaven L, C, eller R som representerar Left, Center, och Right parallellbana, och räknas från vänster (L) till höger (R). Ett exempel är Sthlm-Arlandas huvudbana i nord-sydlig riktning som betecknas 01L/19R. Parallellbanan till huvudbanan har beteckningen 01R/19L [13, s. 38]. Figur 2 visar parallell och krysssystem form av banor på Arlanda flygplats.
17 Figur 2: Översiktskarta över bansystemet vid Stockholm-Arlanda flygplats [13, s. 38].
Olika storlek på flygplan eller samma flygplan med tung eller lätt last kräver varierande banlängder. De största och tyngsta flygplanstyperna t.ex. Airbus 380 och Boeing 747 kräver vid full last en banlängd på 3000 – 4500 m och banbredd mellan 45–60 m. Flera faktorer påverkar startrullsträckans längd såsom storlek på last, vindens styrka och riktning, distans till destination, lufttemperatur m.m. Rullbanan omges av ett hinderfritt stråk upp till 300 m, d.v.s. 150 m på varje sida. Till och från banan taxar flygplanen via taxibanor som leder till
18
3 Landningssystem
Generellt gäller att ett komplett landningssystem består av landningshjälpmedel (på mark och eller i luften) och ytterligare utrustning ombord på flygplanet såsom luftdataenhet och
kursgyro. Båda delsystemen tillsammans utför en process för att forma det landningssystem som är fördelaktigast sett ur noggrannhets- och säkerhetssynpunkt. Landningshjälpmedlet på mark och i luften ger information om flygplanets läge i höjdled och sidled i förhållande till verklig glidbana ned mot sättningspunkten på landningsbanan. Piloten tar emot information om sitt aktuella läge för att styra flygplanet och nå glidbanan. Ibland kräver landning en aktiv insats från markpersonal i tornet för att ge ytterligare information från
radarpresentationsutrustning på marken om flygplanets läge i förhållande till den nominella glidbanan.
3.1 Landningshjälpmedel
Mer avancerade landningshjälpmedel och tillräcklig information avlastar piloten och minskar den mänskliga faktorns negativa betydelse. ”Landningshjälpmedlet ger information om flygplanets läge i sidled och/eller höjdled i förhållande till en nominell glidbana ned mot sättpunkten.” [14, s. 5].
Det finns två typer av hjälpmedel för landning. Den ena typen är visuell, exempelvis VASIS (Visual Approach Slope Indicator System) eller PAPI (Precision Approach Path Indicator) och den andra typen är radiohjälpmedel som VOR (Very High Frequency Omnidirectional Range) och NDB (Non Directional Radio Beacon). För precisionsinflygning används ILS (Instrument Landing System) som hjälpmedel. De visuella landningshjälpmedlen är placerade på flygplatsen eller i dess omedelbara närhet. Banbelysning (bankant och centerlinje) på banor och taxibanor, glidbaneindikering och hindermarkering räknas också som
landningshjälpmedel. [14], [2]
Radiohjälpmedlet VOR används som inflygningshjälpmedel och för navigering under själva flygsträckan medan NDB i första hand används som inflygningshjälpmedel. Som hjälpmedel för distansmätning används ofta en DME (Distance Measuring Equipment), vilket är en utrustning för avståndsmätning från flygplan.
GNSS (Global Navigation Satellite System) och GPS (Global Positioning System) kan vara bättre alternativ än VOR och NDB för navigering och för inflygning p.g.a. högre precision.
19
3.2 Flyginstrument
Flyglägesinstrument ordnas normalt i form av glascockpit EFIS (Electronic Flight Instruments Systems)
, som visar flygplanets läge i luften, dess höjd, fart och andra förändringar. Data ges
via fartmätare, horisontgyro, höjdmätare och kompass. Flyginstrumenten i flygplanetkommunicerar med landningssystemen på marken och bildar ett helhetssystem av flygrörelser på flygplatsen. Horisontgyrot i flygplanet används vid t.ex. dålig sikt och ger en bild av flygplanets läge i förhållande till horisonten vid stigning, plané, sväng och planflykt.
Fartmätaren är en del av flyginstrumenten och mäter det dynamiska trycket, som farten skapar med hjälp av ett pitotrör. Höjdmätaren visar statiska trycket på en skala i företrädesvis fot. Variometern är en mycket känslig mikrobarograf, som mäter sjunk- och stighastigheten. Dessutom finns kompassen, vilken är både ett flyg- och ett navigeringsinstrument och som är gyrostabiliserad. Utveckling av flyginstrumenten har lett till allt större funktionssäkerhet och noggrannhet och att instrumenten blivit mer tydliga och läsbara för att underlätta pilotens arbete och därmed öka flygsäkerheten. Till flyginstrumenten hör alltid reservinstrument och checklistor görs tillgängliga på digitala bildskärmar med hög upplösning.
3.3 Kategorier och precisionsmetoder
Kategorier för landningssystem är baserade på banans siktförhållande. För att karakterisera vädersituationen har man infört begreppen molnbas (molnhöjd) och bansynvidd (RVR = Runway Visual Range). Bansynvidden anges som ett mått på siktminimum och det största avståndet längs en rullbana. De olika bestämda värdena för molnbas och bansynvidd defineras av ICAO och kallas väderkategorier. Väderkategorierna (precisionmetoderna) klassificerasi tre huvudkategorier (CAT I, CAT II och CAT III). När landningskategorin ökar från CAT I till CAT II och CAT III, minskar beslutshöjden och siktminimum [15, s.15–19]:
• CAT I medger landning vid lägst 550 m horisontalsikt och 60 m vertikalsikt.
• CAT II medger landning vid lägst 350 m horisontaliskt med vertikaliskt beslutshöjd på lägst 30 m.
• CAT III är en precisionsmetod med lägre minima än CAT II och uppdelad i tre
underkategorier: CAT III A, CAT III B och CAT III C. De är i sin tur associerade med tre miniminivåer (CAT III A, är associerad med högsta minima, och CAT III C, med lägsta minima).
20 o CAT IIIA medger landning med horisontalsikt på 200 m och lägsta vertikalsikt
är mindre än 30 m.
o CAT IIIB är en precisionsmetod för landning med horisontalsikt på lägst 50 m och en precisionsmetod för landning utan beslutshöjd eller beslutshöjd lägre än 15 m.
o CAT IIIC medger en precisionsmetod för landning utan beslutshöjd och ingen visuell avgränsning av bana alltså 0 m horisontalsikt och 0 m vertikalsikt.
I figur 3 förklaras olika kategorier med tillhörande godkända beslutsminima.
Figur 3: Categories of precision approach [16].
3.4 Instrument Landing System (ILS)
ILS är ett markbaserat internationellt landningssystem, som ger flygplanet
precisionsvägledning för navigering till den slutliga planeringen att närma sig rullbanan för landning. Vid inflygning och landning i ”low visible condition” (som dimma, snö, låga moln, regn och mörker) använder piloten ILS för att positionera planet för inflygning och landning. Systemet är det överlägset mest använda vägledningssystemet för flygplan i den slutgiltiga inflygningsfasen [14, s.11]. Subsystemen VHF/UHF radionavigationshjälpmedel
tillhandahåller två radiovågor för sidledsinformation och höjdledsinformation. ILS sänder signaler och i många fall en kombination av radiosignaler och högintensiva
21 belysningsarrangemang för att möjliggöra säker landning för flygplan under IMC
(instrumentväderförhållanden) [14, s.3]. Eftersom de tekniska specifikationerna för detta system är förhärskande och standard globalt, utrustar flygplanstillverkarna flygplanen med navigeringssystem anpassat för standardsystem på flygplatser. Ett flygplan som är utrustat med ILS-styrsystem kommunicerar med hög tillförlitlighet med ILS-marksystemen på varje flygplats. Figur 4 visar hur en ILS fungerar.
Figur 4: ILS och dess landningsanimation, lokalizer samt markörvaror på top och side view [17].
ILS-systemet utgör den primära inflygningsprocessen inför landning för tre olika kategorier, CAT I, CAT II och CAT III. Systemet ger den precision som är nödvändig för landning i både det horisontella och vertikala planet enligt instrumentflygregler med begränsad sikt och molnbasvärde enligt kategorierna.
Ombord på flygplanet finns en särskild mottagare för markeringsfyrar och via audivisuell presentation indikeras när en markeringsfyr passeras [17]. Systemet med markeringsfyrar kan också kompletteras för kontinuerlig mätning av avstånd med DME-systemet. VOR kan också ingå i systemet, vilket tillsammans bildar det integrerade navigationskomplexet som består av ILS/VOR/DME. Hjälpmedel är riktningsfyrar NDB och VOR och avståndsmätfyrar DME. För att kunna fastställa flygplanets position via avstånd och höjd till en punkt på marken, samlokaliserar man ofta DME med VOR. Piloten behöver bara ställa in VOR-frekvensen,
22 eftersom DME-frekvensen ställs in automatiskt. Nedan presenteras ILS-system
utrustningsdelar och dess funktioner mer generellt.
3.4.1 Localizer VHF-Sändare
Localizer (kurssändare) utgörs av ett antennsystem bestående av en VHF (Very High Frequency) sändare som hanterar frekvenser mellan (108,10–111,95 MHz) [2]. Endast de frekvenser vars första decimal är udda används i systemet och med en kanalseparation av 50 kHz. Antennen placeras i slutet av banan, i motsatt riktning från det håll flygplanet närmar sig banan [14, s. 11]. Se figur 5 och 9. Sändarsignaler från VHF-kurssändarantenn producerar ett riktningsstrålningsmönster bestående av två överlappande lober. Se figur 6. De två loberna överförs till en ILS-frekvens, som moduleras annorlunda så att mottagaren kan skilja dem åt. En består av en bäramplitudmodulerad våg med en harmonisk signalfrekvens på 150 Hz och den andra med samma bäramplitudmodulerad våg med en harmonisk signalfrekvens på 90 Hz. Dessa två riktningsstrålningsmönster skär varandra och skapar därigenom en kursplan eller horisontell axel för ett tillvägagångssätt som i grunden representerar en förlängning av banans axel.
Ur pilotens synfält ligger 150 hz-regionen till höger och 90 hz på vänster sida. Skärningen mellan dessa två regioner bestämmer spårningssignalen. Bredden på strålen förstoras med ökat avstånd. Kurssändaren identifieras med en ljudsignal som adderas till
navigeringssignalen. Ljudsignalen består av bokstaven "I", som följer med ett tillägg med två bokstäver, till exempel: "I-OW".
23 I figur 5 visas en bild av localizerantenner, som är placerade i slutet av banan. Antennerna har till uppgift att skicka radiosignaler i mönsterform som visas i figur 6.
Figur 6: Radiation pattern of the localizer’s VHF transmitter [2, s. 6].
Figur 6 visar en illustration av hur localizern åstadkommer ett riktningsstrålningsmönster inom vilket signalen är proportionell mot det horisontella avståndet från kursbanan. De två överlappande loberna som består av de två informationsbärarna, representerar vänstra respektive högra sidan av centerlinjen.
3.4.2 Glidbanesändare (Glidslope)
Andra delen av ILS:en utgörs av glidbanelutningen, som ger vertikal vägledning till piloten under inflygningsfasen för landning. Sändningen sker från en markstation inom UHF-sändarebandet, som innehåller ett antennsystem som arbetar inom intervallet 329,30–335,00 MHz [2], med en kanalseparation på 50 kHz. Se figur 7. Sändaren är belägen ca 230 - 380 m från landningsbanans tröskel. Se figur 9. Överföringen av signaler i vertikalplanet sker via två lober. Den övre loben har en 90 Hz modulering, medan den nedre loben har en 150 Hz
modulering. Figur 8 visar ett idealiskt glidbanestrålningsmönster. Vid en normal flygning nalkas flygplanet flygfältet på en viss höjd och vid avståndet ca 10 km från landningsbanans tröskel påbörjar flygplanen en höjdsänkning mot sättpunkten med en glidbanelutning om 2– 4°. Stålningsvinkeln över horisontalplanet är 1,35° till 5,25° för en 3° glidbana.
24 Figur 7: The UHF descent beacon draws a glide slope in the area [2, s. 7].
Figur 7 visar bilden av den glideslopeantenn som ligger nära banan. Antennerna skickar radiosignaler i mönsterform som figur 8 visar.
Figur 8: The radiation pattern of the UKV descent beacon forming the glide slope [2, s. 7].
Figur 8 visar en illustration av hur höjdlägessändaren åstadkommer ett strålningsdiagram inom vilket en signal är proportionell mot det vertikala avståndet från den nominella
glidbanan. De två överlappande loberna som består av de två informationsbärare, visar att 90 Hz-modulationen dominerar vid överläge medan 150 Hz dominerar vid underläge i
25 3.4.3 Markeringsfyrar (Mark Beacon)
Som hjälpmedel till ILS används för den diskontinuerliga indikationen en uppsättning av två eller tre markeringsfyrar. Se figur 4 och 9. Vid tre markeringsfyrar kan den tredje (inre
markeringsfyren) vara ett valfritt tilläggsalternativ [14, s.12]. De underlättar orienteringen vid landningen genom att ge fastlagda avstånd till bantröskeln längs inflygningslinjen och
indikerar med olika färg blå, gul eller vit på flyginstrumenten [17].
• Ytterfyr (Blå)
Ytterfyren (Outer Marker indicator-blue) ligger ca 5.5–11 km från landningsbanans tröskel. Skärningspunkten mellan beaconstrålen och glidbanestrålen ligger på en höjd av 426 m ovanför horisontalplanet. På de flygplatser som är omgivna av hög terräng, kan inte ytterfyren placeras. Då använder man istället DME i kombination med ILS för att säkra positionen. [2, s. 17]
• Mellanfyr (Gul)
Mellanfyren (Middle Marker indication-Yellow) ligger ca 926–1482 mfrån landningsbanans tröskel. Strålens skärningspunkt med glidbanepunkten ligger (60–76 m) ovanför
horisontalplanet. Piloten hör en ljudsignal med frekvens of 1300hz [2, s. 17–18]. • Innerfyr (Vit)
Innerfyr (Inner Marker Indicator, White) är den tredje markeringsfyren. Vid denna punkt ligger flygplanen ungefär 60 m över landningsbanans tröskel och på ett avstånd av ca 300 m [2, s. 18]. De har till uppgift att indikera avstånd till bantröskeln längs inflygningslinjen. Det är ett valfritt tilläggsalternativ varför det vid vissa flygplatser inte finns innerfyrar. Se figur 9. Den inre-markören måste kunna användas under särskilt dåligt väder, d.v.s. för systemen CATII och CATIII [2, s. 2–3]. Markeringsfyrarna sänder med bärfrekvensen 75 MHz med en amplitudmodulering om 400 Hz, 1300 Hz och 3000 Hz [14, s. 12].
26 Figur 9: The description and placement of the individual parts of the ILS system [2, s. 3].
3.4.4 Banbelysning
Sista delen av ILS-instrumenten är banbelysningen då flygplanet närmar sig rullbanan. Instrumenten räknas som ett hjälpmedel vid visuella landningar. Se figur 10. Belysningen sträcker sig 900 m ut i naturen före bantröskeln och 600 m efter banänden [18]. De vita starka landningsljusen är det piloten först ser. Därefter kommer en bred gata av ljus ”centreline barette”. Bantröskeln markeras av ”threshold lights” som är en rad av gröna ljus. Med hjälp av centerlinje och genom sina vita, växlande vit-röda och sedan röda ljus, kan piloten veta hur långt flygplanet rullat fram till banänden. Kanterna av banan markeras av omväxlande vita och gula ljus.
27 Figur 10: Banbelysning som ett hjälpmedel vid visuell landning [18, s. 2].
3.4.5 Begränsningar för ILS
ILS är ett standardiserat landningssystem, som har tjänat flygplatser världen över. Systemet har dock grundläggande brister, som blir alltmer kännbara och som ställer ökade krav på någon form av ersättning. Eftersom lokalizer och glidbaneinstrumenten sänder sina strålar för en fastställd inflygningskurs och glidbana i förening med andra fysiska och tekniska brister, lider ILS-systemet av ett antal begränsningar [19], [20], [21], [22]:
• Varje landningsbana kräver en separat ILS och en separat frekvens. • Frekvensmättnad begränsar antalet installerade system.
• Sårbarhet för flerstegsinterferens. • Hinder i signalsändning.
28 • Smal strålbreddssignal är sårbar för störningar från elektromagnetiska källor.
• FM-radio måste stängas av vid intern upptäckt av felförhållanden. • Systemets komplexitet.
• Stöder endast linjär inflygning, d.v.s. raka inflygningar.
• ILS-systemet är kostsamt och kräver stort och omfattande underhåll. • Känsligt för kritiska områden på grund av reflektionsrisk.
• Påverkas av terräng och byggnader framför antennen. • Förhindrar att flygplan använder samma landningsbana. • Orsakar försening vid avstängning.
• Hålltiden är hög (minskning av landningsgraden). • Avståndet mellan flygplan vid inflygning är stort. • Markerat servicekognition.
• Bestämd funktionssäkerhet ger inte särskild exakt sid- och höjdavstånd till bantröskeln.
3.5 Markbaserat Förstärkningssystem (GBAS)
3.5.1 Introduktion GBAS
I varje fas av en kommersiell flygrutt krävs att navigations- och inflygningshjälpmedlen klarar högt ställda krav på noggrannhet, kontinuitet, tillgänglighet och integritet [23, s.4]. Befintliga landningssystem klarar inte alla de krav, som ett modernt och utvecklat system kan erbjuda. GBAS kan uppfylla uppställda krav med hjälp av befintliga GPS-systemets satellitsignaler och ge stöd för alla faser av precisionsinflygningskategorier [24, s. 1]. GBAS är ett
differentiellt GNSS-system, som tillhandahåller parametrar för omedelbar utvärdering av navigationslösningen. Systemet är ett globalt markbaserat förstärkande
navigationssatellitsystem rekommenderat av ICAO som alternativ till nuvarande standard av markbaserade system. Ytterligare en fördel är att angränsande flygplatser inom ett avstånd på max. 42 km (23 Nm) från GBAS-referenspunkten kan förses med behövligt stöd [24, s. 4].
GBAS tillämpar konceptet ”differentiella korrigeringar” för att förstärka inkommande satellitsignaler från GPS-systemet och överföra korrigeringar från GNSS-data till utrustade flygplan i närheten av en flygplats. GBAS kan därmed möjliggöra precisionsinflygningar upp till CAT III. [23, s. 11].
29 3.5.2 GBAS funktioner
GBAS är baserat på tre huvuddelar: markstation, satellitkonstellation och flygplansmottagare. Se figur 11.
Figur 11: GBAS architecture [23, s.12].
GBAS markstation är omgiven av minst tre referensmottagare med tillhörande antenner, som är placerade på exakt uppmätta positioner. Mottagna signaler från GPS-satelliter skickas via respektive referensmottagare vidare för systembehandling i markstationens datorenhet (processor), som i sin tur beräknar differentiella korrigeringar för varje mottagares GPS-signal, dator för systembehandling och en VHF-datasändare VDB. Delsystemet förstärker GPS-systemet för att förbättra flygsäkerheten under olika flygfaser och fastställa dess position kontinuerligt under tiden [23, s.12].
Därefter jämförs det uppmätta avståndet med det faktiska avståndet baserat på satellitpositionen och den riktiga GPS-referensmottagarens bestämda position nära flygplatsen. Det visar genomsnittliga differentiella korrigeringar av alla operativa
referensmottagare, förutom integritetsparametrar och precision. Korrigerade data skickas sedan via VHF-datasändare VDB (Data Broadcast) till aktuellt flygplan. [23, s. 11], [24], [25]
30 Markstationen övervakar även GPS-satellitens allmänna prestanda. Avioniken i
markstationssystemet använder enbart signaler från GPS-satelliter från vilka den får giltiga markkorrigeringar. Övervakningssystemet tar också bort sändningskorrigeringar från satelliter, som har potentiella problem. [24, s. 2–3] Se figur 12.
Figur 12: GBAS Ground Facility (LGF) Calculates Errors in GPS Position and Formulates the GBAS Correction Message [24, s. 2].
GBAS flygplansmottagare består av en GPS-antenn, en VHF-antenn och tillhörande processutrustning. Mottagaren i flygplanet tar emot information via VHF-datasändare parallellt med information från navigationssatelliterna. Flygplansmottagaren beräknar den exakta positionen genom att använda differentialkorrigeringarna från information, som mottagits från navigeringssatelliterna under samma tidsenhet. Alla tre delsystemen förbättrar och förstärker flygsäkerheten vid start och landning på flygplatser samt fastställer dess position inom en meter eller mindre [18]. Under inflygning med det nya landningssystemet GBAS erhåller piloterna information om flygläge i relation till glidbana inkl. kurs enligt samma princip som för ILS [23, s. 12].
3.5.3 Fördelar med GBAS
31 A. Minskning av kritiska och känsliga områden;
GBAS använder inte antennmönster för att komponera navigationssignalen såsom ILS, vilket avsevärt minskar negativa driftseffekter och eliminerar kritiska områden samt ökar
flygplatsens operativa kapacitet under dåliga siktvärden. Se figur 14 och 15.
B. Kurvad inflygning;
GBAS möjliggör kurvad inflygning i både det horisontella och vertikala planet. Man kan därmed skapa inflygningsprocedurer som innebär att man undviker överflygning av bullerutsatta och tätbefolkade områden. Vidare är det möjligt att separera flygplan från varandra vid användning av parallella rullbanor. Kurvad inflygning ger också möjlighet att förkorta in- och utflygningsvägar till en flygplats.
C. Positioneringstjänst;
Denna tjänst ökar precisionen i positionsinformationen för att stödja RNAV-operationer inom aktuellt luftrum och minskar separationen mellan flygplan i terminalområdet. Systemets noggrannhet medger reducerat separationsavstånd i både horisontal- och vertikalplanet mellan flygplan i terminalområdet.
D. Tillhandahållande av service för flera landningsbanor på samma flygplats;
GBAS-systemet kan förse olika rullbanor med olika inflygningsparametrar i realtid. Systemet klarar av max. 48 inflygningar till olika banor och med olika konfigurationer.
E. Tillhandahållande av olika glidbanevinklar för inflygning och inflyttad tröskel; Möjligheten att konfigurera olika gradtal på glidbanan till samma rullbana innebär att inflygningen kan optimeras för varje flygplanstyp. Vid behov kan även den fiktiva bantröskeln förflyttas i längdled.
F. Avbruten inflygning;
Systemet kan öka säkerheten vid avbruten inflygning.
32 Systemet tillåter samma GBAS-station att betjäna olika flygplatser under förutsättning att det finns täckning för den sända VDB-signalen.
33
4 Metod
4.1 Kvalitativa metoder
Kvalitativa metoder används vid datainsamling såsom exempelvis vid intervjuer och observationer av händelseförlopp. Ett ledord är här ”förståelse”. Med ett relativt begränsat antal informanter försöker man ”tränga djupt in i” vad de har att förmedla och ge svar på frågor i avsikt att få fram så värdefull kunskap, insikt och förståelse som möjligt.
Användningen av kvalitativa metoder ställer höga krav på forskaren. Det ingår alltid ett mått av subjektivitet, varför det lätt framstår som mindre objektivt och därmed även kan uppfattas som mindre vetenskapligt [26, s. 65]. Man använder inte i första hand statistiska och
numeriska metoder för att redovisa sina resultat. Datainsamlingen görs via böcker, dokument, tidningar, konferenspapper och intervjuer med berörda informanter utifrån ett systematiskt arbetssätt. Kvalitativa metoder används i regel för beskrivning av en process inom humaniora och pedagogiska ämnesområden, historia, religion, filosofi, antropologi etc. Kvalitativa metoder används normalt när det handlar om gestaltning och att beskriva egenskaper hos en grupp eller hur någonting är beskaffat [27, s. 7].
Kvalitativa metoder kräver mycket tid för att läsa artiklar, böcker och dokument, göra intervjuer med mera. Man måste ha lust och energi för att fortsätta och dokumentera alla intressanta data som handlar om ämnet man vill analysera. Man ska diskutera och ha ingående kontakt med berörda personer och handledare. Varje gång man läser nya artiklar får man ytterligare information och data men till slut måste en avgränsning ske. Det kräver mer fokus och är därför tidskrävande.
Vad gäller intervjuerna är det fråga om att söka nå fördjupade och kompletterande insikter, kunskaper och förståelse utöver vad enbart litteraturstudier kan ge. Det är alltså fråga om att söka ”tränga djupt in i” det de intervjuade (informanterna) kan ge.
4.2 Kvantitativa metoder
Kvantitativa metoder ställs ofta i motsats till kvalitativa metoder. Ledord är ”mäta” och ”förklara” efter analys av en i regel relativt stor mängd data och annan information. Utmärkande kan även sägas vara att materialet gärna analyseras med statistiska metoder. Studier med kvantitativa metoder kan ofta genomföras utan subjektiva moment. De kan därför uppfattas inneha en hög grad av objektivitet och vetenskaplighet. En svårighet kan dock lätt uppstå när det gäller att avgöra hur mängden av data och annan information ska avgränsas,
34 vilket innebär en viss subjektiv bedömning. Man använder laborationer, experiment och studerar enkäter och fakta. Sedan analyserar man insamlat material statistiskt. [28, s.56] Faktainsamlingen sker genom litteraturstudier av allehanda data och på ett kvantitativt sätt. De data och andra fakta som det blir fråga om kan dock lämpligen inte behöva analyseras med statistiska metoder.
Med vissa studier och undersökningar behöver man använda både kvalitativa och kvantitativa metoder. Användningen av blandade metoder är ett givande och bra sätt att få en djupare förståelse av problemställningar och hur de kan lösas. Williamson föreslår att det är möjligt för forskningen att använda antingen kvantitativa eller kvalitativa tillvägagångssätt eller båda. Användningen av olika typer av metoder ökar sannolikt förståelsen av de ämnen man
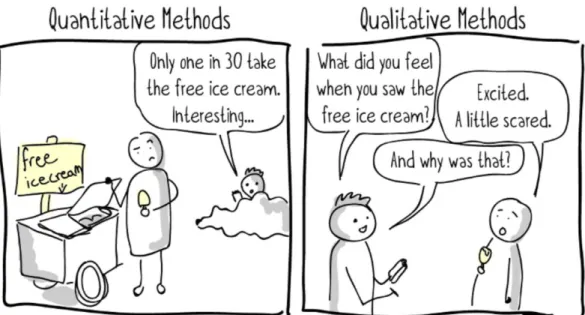
studerar. [29, s. 17]
Figur 13 förklarar hur man bedömer ett och samma subjekt på ett kvalitativt respektive kvantitativt sätt.
Figur 13: Illustration av skillnaden mellan kvalitativa och kvantitativa metoder för en och samma händelse [30].
4.3 Litteraturstudie och datainsamling
Allmänt gäller att den metod man bör välja är beroende av det syfte studien har och syftet är i sin tur beroende av problemet. Trost [31] anser att en studies syfte är avgörande för vilken typ av metod man ska använda sig av. Syftet med min studie är att redogöra för, kartlägga och
35 analysera förutsättningarna för nya, framtida landningssystemets effekter relaterade till
befintliga system på små trafikflygplatser. Vidare ska jag jämföra det nya systemet med dagens system i syfte att bedöma om det är möjligt att ersätta dagens landningssystem.
Själva litteraturstudien och framför allt insamling av annan information och data bör genomföras med användning av kvalitativa eller kvantitativa metoder alternativt en kombination av dem båda. Valet av metod (-er) avgörs oftast av vilken typ av data och ytterligare information som man avser samla in [28, s.56]. Detta är i sin tur beroende av problemformulering och syfte i arbetet. Utifrån syftet i min studie valde jag en kombination av kvalitativ datainsamlingsmetod med vissa inslag av kvantitativ metod. De metoder man väljer i sin arbetsprocess har oftast betydelse för erhållna resultat.
Mitt arbete började med att jag samlade data och annan information med anknytning till mitt problemområde. På ett tidigt stadium träffade jag en bibliotekarie vid MDH för att få råd och anvisningar om hur jag skulle söka relevant litteratur inom mitt specifika ämnesområde. Vidare sökte jag examensarbeten och andra slags publikationer kring forskning inom mina frågeställningar på databasen DIVA. Genom dessa databaser kan man ta del av hur andra arbetat, vilken metod de använt, hur de formulerat problem och syfte samt hur de redovisat lösningar och resultat. Jag surfade på nätet, läste böcker, och granskade vetenskapliga artiklar i tidskrifter om teknisk forskning samt gick igenom vissa bolag inom flygbranschen och flygplatsers hemsidor. Jag tog fram ett antal relevanta artiklar, data och annan information på ett systematiskt sätt från olika källor. Sedan läste jag materialet för att få en bild om ett visst ämne och gjorde sedan en summering med egna ord.
När jag genomfört min litteratursökning på generell nivå, började jag fördjupa
litteraturstudierna med inriktning på att redovisa fakta och synpunkter på de nuvarande systemen med fokus på ILS. Därefter sökte jag litteratur kring det tänkbara alternativet GBAS. En viktig ansats var att finna litteratur och data om skillnaden mellan ILS och GBAS vad avser tillämpningsområden, prestanda, utrustning, säkerhet, ekonomi med mera. Utöver litteraturstudier har jag genomfört egna observationer av landningar, flygrörelser och
systeminstrument. De visuella observationerna har genomförts under flera dagar på bara några hundra meter från rullbanan vid Linköping/SAAB flygplats och avsett både civila och militära flygplansrörelser. Genom att observera flygplanens kurs, höjd och glidbana i kombination med både localizer och UHF-sändaren framgick att de civila flygplanen konsekvent nyttjade
36 ILS-systemet. Däremot tillämpade de militära flygplanen kortare och brantare inflygningar. Min ursprungliga avsikt var att fördjupa min kunskap om vilken inflygningsteknik de båda flygplanskategorierna tillämpar. Jag försökte kontakta och intervjua personer med kunskap om inflygningssystemen men försvarets sekretessregler hindrade mig dock från denna ansats.
Min litteraturstudie skulle kunna bli hur omfattande som helst. Jag avbröt när jag ansåg att jag fått tillräckligt för att nå mitt syfte. I detta ligger givetvis ett mått av subjektiv bedömning.
4.4 Analysmetoder
I detta delkapitel beskriver jag vilka analysmetoder, som använts för att få fram resultaten i kapitel 5. Jag har först beskrivit det befintliga ILS-systemet och sedan det nya GBAS-systemet med avsikt att jämföra och redovisa skillnader mellan dem i analysen.
Beroende av syftet med analysen och typ av data, kan analysmetoder delas in i följande kategorier: Tematiska analys, Grundad teori, Samtalsanalys, Diskursanalys, Narrativ analys och Innehållsanalys [30]. Data inom respektive analysmetod kan i sin tur delas in i olika typer av data. Vid kvalitativ analys ska data vara detaljerad av få fall istället för kortfattad av många fall för kvantitativ analys [32]. Det, som ska vara centralt inom kvalitativa metoder, är att man ska ”tränga djupt in i” för att förstå och förklara. Materialet ska vara djupgående och beskrivande istället för att utgöra kvantitativa variabler. Man ska reflektera över sin roll i processen och vad som kan tänkas påverka genom att dokumentera sina metodiska och analytiska val.
I tabell 3, redovisas olika analysmetoder uppdelade enligt deras syfte med analysen och typ av data.
37 Tabell 3: Analysmetoder: syfte och typ av data.
Källa: [30]
De analysmetoder, som kan vara intressanta för mitt examensarbete, är främst tematisk analys, innehållsanalys och analysschema.
4.4.1 Tematisk analys
Syftet med tematisk analys är att identifiera, strukturera och organisera materialet för att hitta intressanta teman. Typ av data för analysen är olika typer av intervjuer inklusive bilder och tabeller.
4.4.2 Innehållsanalys
Metodiken innebär vanligen att forskaren genom upprepad läsning av ett innehåll drar slutsatser och identifierar meningsenheter baserade på data och dess omgivning. Man
analyserar skriftlig, verbal eller annat typ av data. Man ska även leta efter dolda budskap och hitta mönster i ett material genom att kvantifiera aspekter av kvalitativa data [32]. Data sorteras sedan i kategorier genom att meningsenheternas likheter och skillnader jämförs. Syftet är att uppnå en innehållsrik och bred beskrivning av ett fenomen. Inom innehållsanalys finns två huvudinriktningar, nämligen en kvantitativ gren och en kvalitativ gren. Den senare är den mest förekommande varianten.
38 4.4.3 Analysschema
Syftet med att konstruera ett analysschema är att strukturera insamlad data och därmed underlätta själva analysen. Första steget i analysschemat är att tydligt ange vilka system, som ska jämföras med varandra. Förslagsvis anges ett befintligt system som ett referensalternativ mot vilket ett ”nytt” system jämförs. Materialet ordnas och presenteras utifrån systemens tekniska och operativa kriterier. Valda kriterier organiseras sedan under ett färre antal kategorier.
I analysschemat ska framgå vilka positiva och negativa aspekter, som de jämförda systemen innebär för en flygplats. Tanken är vidare att analysschemat ska underlätta beslutsprocessen för de som deltar i planeringen och genomförandet av ett nytt landningssystem. [33, s. 216]
39
5 Resultat och analys
5.1 Val av kategorier och kriterier för analysen
Valet av kriterier kring ILS- och GBAS-systemen är baserade på de för- och nackdelar, som redovisats i genomgången litteratur och övriga källor. Kriterierna har i sin tur underordnats ett antal olika kategorier. Kategorierna har en viktig roll för systematisering och överblick vid jämförelser av för- och nackdelar med respektive landningssystem. Bland kriterierna är sändningsfrekvens, systeminställning vid ökad inflygning, systemincidenter vid inflygning, utsända signaler, systemets geografiska placering, närliggande elektromagnetiska källor, radiosignaleffekter, drifteffekter på grund av systemplacering, positioneringstjänst, systemets respons med tröskeln, landning med låga siktvärden, väderkategorier, kurvad inflygning, landningsfrekvens vid ökad inflygning, försening under ökad inflygning, underhåll och design, servicekognition, periodiska underhållskostnad, drifteffekter på grund av
systemplacering. De valda kriterierna har stor påverkan på systemens tekniska och operativa funktioner.
För att kunna systematisera ovan nämnda kriterier på ett transparent och logiskt sätt har jag valt följande åtta kategorier:
A. Inflygning och landning.
B. Landningsbana och angränsande flygplatser. C. Landningssystem.
D. Systemets precision och flexibilitet. E. Störningskällor och systemplacering F. Väderminima.
G. Miljöpåverkan.
H. Underhåll och kostnader.
5.2 Analysschema för jämförelse mellan ILS och GBAS
Efter genomgången av de båda landningssystemen i tidigare kapitel och urvalet av tekniska och operativa kriterier från insamlade vetenskapliga data i delkapitel 5.1, ska nu för- och nackdelar mellan ILS och GBAS jämföras med hjälp av ett analysschema. Kriterierna har i sin tur grupperats i åtta olika kategorier med syftet att underlätta förståelsen och tolkningen av
40 skillnader mellan de båda systemen. I sammanhanget bör påpekas att samma kriterium kan ingå i flera kategorier.
Tabell 4: Analysschema för kategorier samt tekniska och operativa kriterier vid jämförelse mellan ILS och GBAS.
Kategorier ILS GBAS
Tekniska & operativa kriterier A. Inflygning och landning
Kurvad inflygning Ger endast stöd för linjära inflygningar d.v.s. raka inflygningar.
Medger kurvad inflygning från olika håll med lateral och vertikal styrning.
Landningsfrekvens vid ökad inflygning
Hålltiden är hög (minskning av landningsfrekvensen) p.g.a. att varje system endast stöder en bana.
Ger möjlighet till upp till 49 olika landningskonfigurationer p.g.a. olika parametrar som glidvinkel och glidbana.
Förseningar p.g.a. ökade antal inflygningar
Avståndet mellan flygplan vid inflygning är stort.
Med hjälp av positioneringstjänstens funktion kan man minska separationen mellan flygplan i terminalområdet. B. Landningsbana
och angränsande flygplatser
Tillgänglighet Varje landningsbana kräver en separat ILS och frekvens.
Kan stödja flera banor på samma flygplats och även närbelägna flygplatser.
Sändningsfrekvens Varje bana har en separat frekvens.
Sändningsfrekvensmättnad begränsar antalet
installerade system
Samma utrustning med flera frekvenser till olika banor. Använder lägre
radiofrekvensspektrum och varje tillvägagångssätt har en särskild kanalnummeridentifierare. Systeminställning
vid ökad inflygning
Hindrar att flygplan använder samma landningsbana.
Systemets inställningar möjliggör att sända olika glidbanevinklar till samma
landningsbana beroende av vad som passar bäst för varje flygplan.
C. Landningssystem Systemincidenter vid Inflygning
Orsakar försening vid avstängning.
Flera GPS och referensmottagare ger flera alternativ och reserver för systemet. Signalkriterier Har antenner, som kan leda
till hinder i signalsändning.
Har inte antennmönster för att komponera navigationssignalen, vilket avsevärt minskar negativa driftseffekter och eliminerar kritiska hinder.
41 Geografisk placering Påverkad av terräng och
byggnader framför antennen.
Antenner mottar signaler från flera GPS samtidigt och påverkas inte av byggnader.
D. Systemets precision och flexibilitet
Positioneringstjänst Opålitlig och ger inte särskilt exakt sid- och höjdavstånd till bantröskeln.
Har positioneringstjänst vilken kan öka noggrannheten till ett avstånd mindre än en meter i både vertikal och horisontal
riktning. Systemets respons
med tröskeln
Vid behov av att förskjuta en tröskel måste ILS-systemet fysiskt förflyttas för att stödja den nya tröskeln.
Vid behov av att förskjuta en tröskel kan GBAS konfigureras för att stödja den nya tröskeln. E. Störningskällor och systemplacering Närliggande elektromagnetiska källor Smal sändningsbreddssignal är sårbar för störningar från elektromagnetiska källor.
Påverkas inte av elektromagnetiska källor.
Radiosignaleffekter FM-radio måste stängas av vid intern upptäckt av felförhållanden.
Påverkas inte av FM-radiosignaler.
Drifteffekter p.g.a. systemplacering
Känslig för kritiska områden på grund av reflektionsrisk.
Har ingen reflektionsrisk, minskar driftseffekterna och eliminerar kritiska områden.
F. Väderminima Landning med låga siktvärden
Landning med låga siktvärden är begränsad.
Ger möjligheter i alla väderförhållanden.
Väderkategorier Klarar inte kategori III. Passar alla kategorier. G. Miljöaspekter
Utsläpp och buller Påverkan av miljön på grund av väntetid och längre inflygningskurva mellan flygplanen.
Kortare mellanrum och tid mellan flygplanen. Inflygningen kan ske utanför tätbefolkade stadsområden och med brantare glidbanevinkel.
Markanvändning Tar mer plats på marken. Kräver mindre markytor och har en del av instrumenten i rymden.
H. Underhåll och kostnader Underhåll och design
Systemet är komplext och kräver mer underhåll.
Systemet är enkelt att installera och underhålla.
Servicekognition Markerad servicekognition. Behöver minsta servicekognition. Periodiska
underhållskostnader
Är kostsamt och kräver periodiskt underhåll.
Lägre underhåll för att det är datorsatellitbaserat.
42 Investeringar Utbyggnad av nya rullbanor
kräver investering i nytt landningssystem.
Samma utrustning kan användas till flera rullbanor.
Källa: Egen bearbetning av [2, s. 3], [14, s. 11], [23, s. 11–14], [24, s. 4], [34], [35, s. 17–20].
5.3 Sammanställning av resultat
I analysschemat (tabell 4) kan man utläsa att det föreligger stora skillnader mellan ILS- och GBAS-systemen. Vid en översiktlig genomgång av de valda kriterierna framgår tydligt att GBAS uppvisar många fördelar vid jämförelsen med ILS. I sammanhanget är det dock viktigt att mera i detalj peka på de båda landningssystemens styrkor och svagheter. Se punkterna A– H enligt följande:
A. Inflygning och landning
Vid ökad frekvens av inflygningar kan man med GBAS utnyttja flera banor på en flygplats och även på närbelägna flygplatser. Därutöver tillåter systemet olika glidbanevinklar och kurvad inflygning till samma rullbana. ILS-systemet tillåter endast fast glidbanevinkel och raka inflygningar till endast en rullbana. Detta innebär lägre antal landningar per tidsenhet, ökat buller och mer utsläpp.
B. Landningsbana och angränsade flygplatser
Varje landningsbana kräver ett separat ILS-system med en specifik sändningsfrekvens, vilket leder till ökning av antalet ILS-instrument för varje ny rullbana på en flygplats [14, s. 11]. Alternativet är att enbart installera ett GBAS-system för samtliga banor och varje konfiguration har en särskild kanalnummeridentifierare [23, s. 13–14]. Ytterligare fördelar är att angränsande flygplatser inom ett avstånd på max. 42 km (23 Nm) från GBAS-referenspunkten kan förses med behövligt stöd [24, s. 4].
C. Landningssystem
Eftersom varje ILS-system ger stöd för endast en bana, resulterar det i att inflygningar måste avbrytas vid stängning av systemet med förseningar som följd [2, s. 3]. ILS är inte särskilt exakt och vid behov av att förskjuta en tröskel, måste hela ILS-systemet förflyttas i längdled. Detta gäller inte med GBAS, vilket har flera GPS-mottagare och ifall en av dem blir funktionsoduglig finns alltid signaler från andra mottagare. Se figur 12. Systemet kan klara av max. 48 inflygningar till olika rullbanor samtidigt [23,
43 s. 14]. Flygplanets position fastställs kontinuerligt i realtid [23, s. 12]. GBAS-systemet innebär ingen reflektionsrisk och eliminerar kritiska områden.
D. Systemets precision och flexibilitet
GBAS är flexibelt och har hög precision genom sin positioneringstjänst, vilket ger ett avstånd på mindre än en meter från tröskeln i både vertikala och horisontala riktningar [34, s. 1]. Denna egenskap är viktig och spelar stor roll under CAT III, när piloten inte kan se tröskeln på rullbanan.
Figur 14 och 15 är testresultat av en genomförd testundersökning av Felux, Dautermann och Becker [34] rörande jämförelse och skillnaden mellan ILS och GBAS. Figuren 14, presenterar de observerade lokaliseringsfelen för ILS (blå). Histogrammet visar att felen för ILS-systemet uppgick till nästan 13 m. Motsvarande fel för GBAS-systemet (röd) låg lägre än 0,6 m under samtliga testflygningar.
Figur 14: Histogram of Localizer errors (blue) and GBAS lateral errors (red) [25, s. 6].
Figure 15, visar att standardavvikelsen för fel i GBAS-systemet var 0,1m i sidled och 0,4 m vertikalt och inga uppmärksamma reflektionsrisker och kritiska område eliminering.
44 Standardavvikelsen för fel i ILS-systemet var 2,9 m i sidled (localizer) och 1,9 m vertikalt (glidbanan).
Figur 15: Comparison of vertical ILS guidance, GBAS guidance and GBAS VPL [25, s. 5].
E. Störningskällor och systemplacering
Eftersom ILS-systemet har antennmönster, finns alltid risk att något föremål hindrar strålningen av instrementerna. Se figur 5, 6, 7 och 8. Vid installation av ILS-sändaren är det viktigt att inget hinder påverkar signalerna. På grund av ILS-sändaren har smal sändningsbreddssignal, kommer den påverkas negativt av närliggande källor och FM-radiosignaler. I GBAS-systemet används inte antennmönster för att komponera navigationssignalen, vilket avsevärt minskar negativa driftseffekter. Dessutom ökar flygplatsens operativa kapacitet under dåliga väderförhållanden. [23, s. 13-14].
F. Väderminima
Ett av ILS stora problem är att landning under väderförhållanden med låg
molnbashöjd och siktvärden är begränsad. GBAS är i jämförelse ett bättre alternativ till ILS för kategorier II och III [23, s. 11].
45 G. Miljöpåverkan
Vid användning av GBAS kan många miljöpåverkande aspekter elimineras och förbättras. Utsläpp, buller och tidsförseningar kan elimineras och uppnås genom att genomföra brantare och kurvade inflygningar. Ytterligare en aspekt är att avstånden mellan flygplan under inflygning kan reduceras genom att flexibelt använda
närliggande rullbanor.
H. Underhåll och kostnader
ILS-systemet är komplext och kostsamt p.g.a. ett avancerat och periodiska underhåll och servicekognition. GBAS-systemet är datorsatellitbaserat, enkelt att installera och kräver låg servicekognition.
46
6 Diskussion
I examensarbetet har jag analyserat i vilken grad det nya landningssystemet GBAS skulle kunna användas på små flygplatser, som ersättning till ILS. Inledningsvis studerade jag olika landningssystem för att få en generell uppfattning om deras för- och nackdelar. Därefter valde jag den lämpligaste metoden för att analysera och fördjupa arbetet. Med hjälp av
analysschema gjorde jag jämförelser mellan två landningssystem med syftet att kunna bedöma om GBAS-systemet skulle kunna ersätta ILS-systemet. Fördelarna med den kvalitativa
metoden var att datainsamlingen och analysen medgav en djupare förståelse av
landningssystemen. Systematiseringen och kategoriseringen av olika kriterier i analysschemat bidrog till en tydligare jämförelse mellan systemen. Nackdelar med kvalitativa metoder är att de är tidskrävande och att insamlad data kan vara svår att tolka och jämföra. På grund av flygindustrins sekretessregler för GBAS-systemet var det inte möjligt att samla in data för kvantitativa beräkningar och analyser.
GBAS är ett landningssystem, som förmodligen skulle kunna rädda små flygplatser i
konkurrens med de stora. Vid tolkningen av resultaten i analysschemat (tabell 4) framgår att systemet har många fördelar, som skulle passa små flygplatser vid ersättning av det äldre ILS-systemet. De tekniska och ekonomiska problemen vilka är förknippade med ILS-systemet, innebär mer arbete och större underhållskostnader för små flygplatser. Landningssystemet GBAS löser många av de ekonomiska, tekniska och miljörelaterade problemen, som är kategoriserade i analysschemat.
Flygplatsernas intäkter är beroende av antalet flygrörelser (starter och landningar). Därför behöver flygplatserna kunna ta emot så många flygplan som möjligt oavsett
väderförhållanden och ge dem korrekt information under olika förutsättningar för inflygning och landning. Vidare bör utrustningen vara enkel, robust, billig och i behov av minsta möjliga underhåll. GBAS kan ge de möjligheterna till flygplatser.
Flygoperatörer väljer företrädesvis billiga och geografiskt välplacerade flygplatser för sina starter och landningar. Med ökade antal flygrörelser och bättre väderinformation under dåligt väder, väljer de att operera på stora flygplatser. Små flygplatser tvingas för att inte gå i konkurs utrusta sig med moderna landningsinstrument för att kunna ta emot fler flygplan och ge dem tillräcklig information under dåliga väderförhållanden fram till CAT III.
47 Examensarbetet visar en positiv syn på GBAS, som ersättning till ILS på små flygplatser så att de ska kunna konkurrera med de stora flygplatserna och fortsätta bedriva sin verksamhet.
48
7 Slutsatser
Huvudsyftet i examensarbetet är att analysera för- och nackdelar med det nya
landningssystemet GBAS relaterat till det befintliga ILS-systemet. Vidare är delsyften: • att kartlägga de vanligaste landningssystemen.
• att analysera förutsättningarna för nya, framtida landningssystem och deras effekter på små trafikflygplatser.
Enligt studiens resultat är det uppenbart att GBAS ger säkrare och stabilare information till piloterna för att de ska kunna genomföra säkra inflygningar och landningar. Övergången till ny teknik innebär att nackdelarna med ILS-systemet kan reduceras och att även underhållet kan hållas på rimlig kostnadsnivå. Frågan är dock i vilken utsträckning GBAS kan ersätta ILS? För att kunna besvara frågeställningen har jag analyserat ett antal kriterier med syfte att kunna jämföra GBAS-systemet med det befintliga ILS-systemet. Resultaten visar att
majoriteten av kriterierna har en högre positiv måluppfyllelse för GBAS jämfört med ILS. Kriterierna är grupperade i ett antal kategorier vilka samtliga visar fördelar för GBAS:
a. Landningsbana. b. Landningssystem.
c. Närliggande signalkällor och systemplacering d. Väderminima.
e. Kurvad inflygning och landning f. System precision och flexibilitet. g. Miljöpåverkan.
h. Underhåll och kostnader
Ett antal undersökningar visar att kostnader har en viktig roll för att kunna implementera ett nytt landningssystem på flygplatser med låga intäkter. Höga investeringskostnader kan hindra införandet av systemet. Trots höga initiala kostnader förordas dock GBAS-systemet av många flygplatsoperatörer, eftersom kostnaderna för att installera systemet är mycket lägre än
befintliga system. Användningen av det nya systemet kommer också att medföra lägre
![Figur 1: Svenska flygplatser med linje- eller chartertrafik [9, s. 13].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/13.892.114.485.302.1107/figur-svenska-flygplatser-linje-chartertrafik-s.webp)

![Figur 3: Categories of precision approach [16].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/20.892.113.745.443.771/figur-categories-of-precision-approach.webp)
![Figur 4: ILS och dess landningsanimation, lokalizer samt markörvaror på top och side view [17]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/21.892.109.755.326.687/figur-ils-landningsanimation-lokalizer-samt-markörvaror-side-view.webp)
![Figur 5: Antennas of the localizer system [2, s. 4].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/22.892.108.673.805.1112/figur-antennas-localizer-s.webp)
![Figur 6: Radiation pattern of the localizer’s VHF transmitter [2, s. 6].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/23.892.114.562.211.461/figur-radiation-pattern-localizer-s-vhf-transmitter-s.webp)

![Figur 11: GBAS architecture [23, s.12].](https://thumb-eu.123doks.com/thumbv2/5dokorg/4441182.107571/29.892.109.703.238.666/figur-gbas-architecture-s.webp)