VTI notat 12-2012 Utgivningsår 2012
www.vti.se/publikationer
Test av korrektionstjänst för GPS-mottagare
vid vägytemätning
Anna K. Arvidsson Thomas Lundberg
Förord
Detta är ett arbete som är beställt av Trafikverket med Kerstin Svartling som kontakt-man. Bakgrunden till beställningen är att den realtidskorrektion som används vid positionsmätningen (GPS) som utförs i samband med vägytemättjänsten upphör. Syftet med undersökningen är att se om den alternativa korrektionstjänst som finns tillgänglig kan användas i stället. De data som analyserats har samlats in av Ramböll i en mätbil där tre olika GPS-system använts och analysarbetet är gjort av Anna Arvidsson. Undertecknad har varit behjälplig vid analysarbetet och rapportskrivningen. Linköping mars 2012
Thomas Lundberg Projektledare
Kvalitetsgranskning
Intern granskning har genomförts 14 mars 2012 av Leif Sjögren vid VTI. Anna Arvidsson har genomfört justeringar av slutligt rapportmanus 26 mars 2012. Projektledarens närmaste chef, Anita Ihs, har därefter granskat och godkänt publikationen för publicering 27 mars 2012.
Quality review
Internal peer review was performed on 14 March 2012 by Leif Sjögren at VTI. Anna Arvidsson has made alterations to the final manuscript of the report on 26 March 2012. The research director of the project manager, Anita Ihs, examined and approved the report for publication on 27 March 2012.
Innehållsförteckning
Sammanfattning ... 5 Summary ... 7 1 Bakgrund ... 9 2 Syfte... 10 3 Metod ... 11 4 Utvärdering ... 12 5 Resultat ... 135.1 Är det skillnad på täckning mellan EPOS och EGNOS ... 13
5.2 Hur är noggrannheten vid jämförelse mellan EPOS och EGNOS-korrektion? ... 15
5.3 Hur påverkar terrängen täckningen mellan EPOS och EGNOS? ... 20
5.4 Kan EGNOS ersätta EPOS? ... 21
6 Felkällor ... 22
Referenser... 23
Bilaga 1
Avståndsjämförelse av GPS3 &GPS1 och GPS3 & GPS2 för de koordinaterna där realtidskorrektionen är aktiv för alla tre GPS-mottagarna
Bilaga 2
Figur 2 med fullständig skala Bilaga 3
Test av korrektionstjänst för GPS-mottagare vid vägytemätning
av Anna K Arvidsson och Thomas Lundberg VTI
581 95 Linköping
Sammanfattning
En avgörande faktor vid inventering av vägnätets tillstånd med hjälp av mätbilar är att med tillräckligt bra noggrannhet kunna positionsbestämma mätdata. Senast den 31 mars 2012 kommer den korrektionstjänst (EPOS) som används för att ge en förbättrad
positionering att läggas ner. Det är en betaltjänst som har tillhandahållits från Terracom. På grund av dålig lönsamhet läggs den nu ner. I och med detta vill Trafikverket veta om den kostnadsfria korrektionstjänsten EGNOS (European Geostationary Navigation Overlay Service) som drivs av ESA (European Space Agency) är möjlig att använda istället.
Positionsdata i form av koordinater har samlats in på 18 sträckor runt om i Sverige. Vägsträckorna har olika längder från cirka 20 km och upp till 105 km och vägkategorier av varierande typ, från sekundära och tertiära vägar till Europavägar. Vägarnas
omgivning är dessutom av olika karaktär från öppet kustlandskap till tät skog och från flack till kuperad terräng.
Tre GPS-mottagare användes, den ena var en ny OxTS RT3050 som hade korrektions-tjänsten EGNOS och var försedd med ett hjälpsystem (tröghetsnavigering).Dessutom användes två stycken äldre Trimble AgGP332 varav den ena använde EGNOS och den andra agerade som referens och använde det nuvarande systemet, EPOS
(realtidkorrektion av GPS-positioner via FM-bandet).
Korrektionstjänsten EGNOS består av tre geostationära satelliter över Europa och täcker hela Sverige men med en sämre täckning och noggrannhet i norra Sverige. Detta var dock inget som kunde utläsas från testerna.
Den väsentliga frågan som denna undersökning skulle ge svar på var om EGNOS kan ersätta EPOS, vilket testerna visar att den kan. Vi har inte kunna observera några systematiska skillnader i positionsangivelser. Det framkom dock att mottagnings-kvaliteten för de två olika GPS-mottagarna med korrektionstjänsten EGNOS varierade ganska mycket till den nya och mer moderna mottagarens fördel.
Test of correction services for GPS receivers used for road surface measurements
by Anna K Arvidsson och Thomas Lundberg
VTI (Swedish National Road and Transport Research Institute SE-581 95 Linköping Sweden
Summary
A key factor in the inventory of the road network condition is to be able to
geographically position the measurement data at the right place with sufficient accuracy. By 31 March 2012, the correction service (EPOS), used to provide an improved
positioning, will shut down. It is a paid service provided by Terracom. Because of low profitability it is now shutting down. With this, the Swedish Transport Administration would like to know if the free correction service EGNOS (European Geostationary Navigation Overlay Service) operated by ESA (European Space Agency) is possible to use instead.
The test uses position data in the form of coordinates, collected on 18 routes throughout Sweden. The routes have different lengths from about 20 km to 105 km and road categories of various types, from secondary and tertiary roads to highways. Road infrastructure and environment is of different nature from the open coastal landscape to dense forest and from flat to hilly terrain.
Three GPS receivers are used, one was a new receiver OxTS RT3050 with correction service EGNOS and was also equipped with an auxiliary system (inertial navigation system), and the two other receivers were both Trimble AgGP332, one using EGNOS, and the other acting as a reference, using the present system, EPOS (real-time correction of the GPS positions via FM band).
The correction service EGNOS consists of three geostationary satellites over Europe and covers the whole of Sweden but with a poorer coverage and accuracy in northern Sweden. However, this was nothing that could be seen from the tests.
The essential question that this study would provide answers to was if EGNOS can replace EPOS, which the tests show that it can. We have not been able to observe any systematic differences in position data. It appeared, however, that the reception quality of the two GPS receivers with the EGNOS correction services varied quite a bit and that the new and more modern receiver had a certain advantage in this respect.
1
Bakgrund
Vid de övergripande tillståndsmätningarna som utförs av de statliga belagda vägarna i Sverige är positionsbestämningen ett viktigt inslag för att kunna knyta en mätning till den vägnätsmodell som används av Trafikverket. Under våren 2012 kommer
korrektionstjänsten (EPOS) som använts av leverantörerna av vägytemättjänsten att läggas ner på grund av dålig lönsamhet. Tjänsten, som är en betaltjänst, distribueras av Terracom och ger en förbättrad noggrannhet vid GPS-positionering. EPOS-tjänsten bygger på att mycket väl geografiskt definierade stationära basstationer tar emot positionsdata från satelliterna och beräknar aktuellt positionsfel. Positionsfelet skickas som korrektionsdata i realtid via FM-bandet vilket ger en god täckning nationellt och den fungerar också i färd.
Det huvudsakliga syftet med positioneringen i mätbilarna är att lokalisera knutpunkter (korsning mellan två vägar) på vägnätet. Efter att Vägverket (nuvarande Trafikverket) införde en vägnätsbeskrivning med utgångspunkt från den Nationella Vägdatabasen (NVDB) innebar det att knutpunkten definieras som skärningspunkten mellan två vägar. Tidigare var definitionen av knutpunkten en väl definierad punkt i terrängen som
operatören kunde positionsbestämma visuellt. Att kunna avgöra skärningspunkten mellan två vägar är enkelt på det mindre vägnätet men mycket svårt på t.ex. en
motorväg där en ramps skärningspunkt med huvudvägen är svår att syfta visuellt. Med en noggrann positionering kan man låta systemet avgöra var knutpunkten ligger om dess läge också finns förprogrammerat i mätsystemet. Ett alternativ till EPOS är EGNOS (European Geostationary Navigation Overlay Service). Det är en kostnadsfri korrektionstjänst som drivs av ESA (European Space Agency). Tjänsten består av tre geostationära satelliter över Europa och täcker hela Sverige men med en på pappret sämre täckning och noggrannhet i norra Sverige.
Figur 1 I norra Sverige (den bruna delen) garanteras en noggrannhet av 1–2 m (>82 %) och 2–3 m (>95 %). I Södra Sverige (den gröna delen) garanteras en noggrannhet av 1–2 m (>95 %) och 2–3 m (>99 %).
Med anledning av denna förändring har Trafikverket gett VTI i uppdrag att undersöka möjligheten att använda EGNOS för korrektion av positionen vid vägytemätningarna som ersättning för det betalsystem som använts till nu (EPOS). Det dataunderlag som ligger till grund för testen är insamlat av Ramböll, en av de tre leverantörerna av vägytemättjänsten (de övriga är Destia och Vectura).
2
Syfte
Projektet har som syfte att svara på följande frågor: 1. Kan EGNOS ersätta EPOS?
2. Är det skillnad på täckning mellan EPOS och EGNOS och är skillnader i så fall regionala?
(Norra Sverige, Mellansverige, Södra Sverige)
3. Hur påverkar terrängen täckningen mellan EPOS och EGNOS?
Kuperat/skogspartier; Öppet slätt landskap; Kuperat landskap; Kustlandskap; Kuperat/bergskärning; Tätare skogspartier; Kuperad kust/bergsskärning; Öppet landskap; Varierande; Skogspartier
3
Metod
Positionsdata i form av koordinater har samlats in på 18 sträckor runt om i Sverige. Vägsträckorna har olika längder från ca 20 km och upp till 105 km och är av olika karaktär och storlek med omgivning från öppet kustlandskap till tät skog och från flack till kuperad terräng.
Tre GPS-mottagare användes, den ena var en OxTS RT3050 som hade korrektions-tjänsten EGNOS och dessutom användes två stycken Trimble AgGP332 varav den ena använde EGNOS och den andra utnyttjades som referens och använde det nuvarande systemet, EPOS.
För att kunna undersöka vad det skulle innebära att gå över från EPOS-korrigerad positionsdata till EGNOS-korrigerad positionsdata beräknas skillnaden i position mellan de olika systemen (per 20 m) som avståndet mellan punkterna (plana koordinater X,Y).
.
Data är insamlat från de tre olika systemen som en position per 20 m. Insamlingen har skett i en mätbil där alla tre mottagarna samlat in data samtidigt. Utöver insamlade positioner finns bl.a. uppgifter om typ av korrektion, HDOP (mått på noggrannhet), antal satelliter och mäthastighet. De positioner som samlats in är plana koordinater i referenssystemet SWEREF-99TM. Mer detaljer om mätningen beskrivs i bilaga 3 (Rapport - Test av korrektionstjänst, skriven av Ramböll).
4
Utvärdering
Det är positioneringens kvalitet erhållen med hjälp av GPS uppmätt på 18 sträckor som ska utvärderas. Den geografiska fördelningen för sträckorna är över hela landet. Tabell 1 visar en förteckning över de utvalda sträckorna.
Tabell 1 Utvalda sträckor, med karaktärsbeskrivning enl. Bilaga 3
Sträcka Väg Sträcka Längd (m) Region Karaktär
1 6 Malmö–Trelleborg 20 212 Södra Sverige Öppet slätt landskap
2 9/19 Simrishamn–Kristianstad 52 883 Södra Sverige Kuperat landskap
3 22 Ronneby–Karlskrona 25 908 Södra Sverige Kustlandskap
4 23 Kisa - Linköping 45 339 Södra Sverige Kuperat/bergskärning
5 4 Linköping–Norrköping 39 439 Södra Sverige Öppet slätt landskap
6 56 Katrineholm–Kungsör 47 971 Södra Sverige Tätare skogspartier
7 4 Härnösand–Örnsköldsvik 88 778 Norra Sverige Kuperad kust/bergsk
8 4 Råneå–Töre 20 980 Norra Sverige Kustlandskap
9 10 Morjärv–Överkalix 31 901 Norra Sverige Kuperat/skogspartier
10 392 Överkalix–Pajala 104 769 Norra Sverige Kuperat/skogspartier
11 10 Kiruna–Abisko 89 983 Norra Sverige Öppet landskap
12 45 Jokkmokk–Väg 374 69 243 Norra Sverige Kuperat/skogspartier
13 45 Sorsele–Storuman 69 601 Norra Sverige Kuperat/skogspartier
14 45 Brunflo–Åsarna 58 006 Norra Sverige Varierande
15 45 Mora–Johannisholm 34 069 Mellersta Sverige Skogspartier
16 45 Torsby–Sunne 34 248 Mellersta Sverige Öppet landskap
17 45 Mellerud–Frändefors 22 954 Södra Sverige Öppet landskap
18 6 Varberg–Falkenberg 30 140 Södra Sverige Öppet landskap
Den totala längden för alla mätsträckor var ca 886 km. Det var tre GPS-mottagare som användes vid mätningarna.
GPS3 (Trimble AgGP332) med EPOS som korrektionstjänst.
GPS2 var samma GPS-modell men med EGNOS som korrektionstjänst. GPS1 (OxTS RT3050) använde även den EGNOS och har dessutom
tröghetsnavigering som stöd för positioneringen, vilket hjälper till vid dåliga mottagningsförhållanden.
Den sistnämnda GPS-modellen är den nyaste modellen av de två olika modellerna som är med i studien.
En jämförelse har slutligen skett av erhållna positioner från de tre olika systemen. Den ursprungliga metoden GPS3 med EPOS korrektion har varit utgångspunkt (referens). Skillnader har studerats vad gäller täckning (regionala skillnader) och utseendet på omgivande terräng.
5
Resultat
5.1
Är det skillnad på täckning mellan EPOS och EGNOS och är
skillnader i så fall regionala?
I Norra Sverige var det 8 sträckor (nummer 7 till 14), 2 sträckor var belägna i Mellersta Sverige (nummer 15 & 16) och Södra Sverige hade 8 sträckor (nummer 1–6 & 17–18). I varje nodpunkt nollställdes längdmätningen och ett nytt länk-ID skapades. Detta skedde genom att systemet automatiskt identifierade koordinaterna i varje nodpunkt gentemot i förväg planerade koordinater. Koordinater från GPS1 användes för detta ändamål. GPS1 visade sig vara den mottagare som har minst spridning, vilket troligtvis beror på att tröghetsnavigeringen stödjer positioneringen. De insamlade koordinaterna loggades var 20:e meter, vilket är det som visas i diagrammen nedan (Figur 2).
Figurerna visar skillnaden i X/Y (east/north) mellan två på varandra följande koordinat-par. Cirkelformerna beror på att vägsträckorna inte går i nord-sydlig respektive öst-västlig riktning, men den ideala förflyttningen är 20 meter åt någon riktning. I Figur 2 är skalan densamma för alla figurer så att man ska kunna se skillnaderna mellan
sträckorna. Ett fåtal punkter syns dock inte med denna skala. I Bilaga 2 finns diagrammen med automatisk skalindelning där alla mätpunkter presenteras. Som nämnt hade GPS1 inte så stor spridning bortsett från några enstaka felvärden. GPS2 och GPS3 hade lite bredare spridningsområden, men att se någon skillnad mellan olika delar av landet eller om terrängen spelar in, är svårare att säga efter endast en körning av sträckan.
I delkapitel 5.2 görs beräkningar av avståndsskillnaderna mellan de olika GPS:erna och där studeras även den geografiska aspekten.
Figur 2 Kontrollsträckorna är plottade med det verkliga avståndet mellan varje loggning. x-axel = West–East och y-axel =North–South.
Enhet meter. Svarta punkter (GPS1), blå (GPS2) och röd (GPS3).
Påverkas kvaliteten på de insamlade koordinaterna av geografiska skillnader? Spelar terrängen in?
När mätdata samlas in ger mottagaren information (GPS-kvalitet) om aktuell
korrektionstjänst varit aktiv eller ej och om de satelliter som mottagaren tar emot har en bra geometri vilket är en förutsättning för att kunna leverera en position. GPS-kvaliteten redovisas på en skala mellan 0 och 2 för GPS2 och GPS3, för GPS 1 används 6 istället för 0. 6 betyder att tröghetsnavigeringen används fullt ut, och därmed används inte satellitpositionering och tillhörande realtidskorrektion.
I Tabell 2 visas hur fördelningen mellan kvaliteten på mätningarna på de olika sträckorna har varit. Enligt referensmanualen för Trimble-GPS:erna, GPS2 & GPS3, (TSIP, 1999) kan kvaliteten levereras med tre noggrannheter,
0: fix not valid Satellitmottagaren kan ej ge position
6: fix not valid Position ges av tröghetsnavigeringssystemet
1: GPS fix Satellitmottagaren ger en position utan aktiv korrektionstjänst
2: DGPS fix Satellitmottagaren ger en position med aktiv korrektionstjänst
Karlskrona och Sträcka 7 mellan Härnösand och Örnsköldsvik samt Sträcka 8, Råneå och Töre är alla tre betecknade som kuststräckor.
Tabell 2 Sträckornas procentuella fördelning i kvalitet. Fet text – högsta procent av respektive GPS-mottagare. Sträcka GPS 1 GPS 2 GPS 3 GPS 1 GPS 2 GPS 3 GPS 1 GPS 2 GPS 3 6 0 0 1 1 1 2 2 2 1 0,6 3,1 3,3 0,4 22,9 0 99,0 74,1 96,7 2 1,5 2,4 2,9 0,1 28,8 0 98,4 68,9 97,1 3 0,4 2,2 2,0 31,1 71,1 3,7 68,6 26,7 94,3 4 0,1 0,3 0,3 0,2 16,1 0 99,6 83,6 99,7 5 0,6 2,1 2,0 0,1 17,4 4,4 99,4 80,4 93,6 6 0,4 0 0 2,6 49,6 0,4 97,0 50,4 99,6 7 0,2 1,4 1,3 2,5 58,4 7,8 97,3 40,2 90,9 8 0,4 2,1 2,2 2,3 97,9 0 97,4 0 97,8 9 0,1 0,4 0,4 42,3 46,2 5,1 57,6 53,3 94,5 10 0 0 0 8,3 18,9 2,0 91,7 81,1 98,0 11 0,2 0,1 0,1 15,8 30,2 3,7 84,1 69,7 96,2 12 0 0 0 29,4 60,9 1,7 70,6 39,1 98,3 13 0 0 0 7,8 66,1 4,0 92,2 33,9 96,0 14 0,1 0,2 0,2 1,1 45,8 0 98,8 53,9 99,8 15 0 0,4 0,4 6,3 45,0 4,5 93,7 54,6 95,1 16 0 0 0 0 5,8 3,7 100 94,2 96,3 17 0 0 0 0 3,9 0 100 96,1 100 18 0,9 3,8 3,8 0,1 17,6 0,5 98,9 78,6 95,8
Graden av täckningen går inte att skilja mellan de 18 teststräckorna. Däremot inträffar det på några av sträckorna att GPS2 har en stor andel av positionerna bestämda med GPS-kvalitet=1. Det innebär att korrektionstjänsten inte är tillgänglig för mottagaren. Det anmärkningsvärda med detta är att GPS1, som är en modernare mottagare med ny GPS-mottagningsteknik, ger en mycket högre andel positioner där realtidskorrektionen används i jämförelse med GPS2, se Tabell 3. Dessa mottagare använder samma typ av korrektionstjänst. Det innebär att med den moderna mottagningstekniken kan man uppnå en acceptabel täckningsgrad med hjälp av EGNOS-korrektionen i jämförelse med den utgående EPOS-tjänsten.
Tabell 3 Medelvärdet av andel av mätt sträcka då korrektionstjänsten varit aktiv.
GPS 1 GPS 2 GPS 3 91,0% 59,9% 96,5%
5.2
Hur är noggrannheten vid jämförelse mellan EPOS och
EGNOS-korrektion?
För att kunna bedöma systemens noggrannhet, har den parvisa skillnaden i positionerna mellan två system beräknats. GPS3 med EPOS har använts som referens.
Dvs. Resp.
Dessa beräkningar har gjorts för var 20:e meter på de 18 vägsträckorna. I och med att antennerna är placerade på olika positioner på mätbilen ger GPS1 och GPS2 sin position med ett systematiskt fel då jämförelsen görs med GPS3. Ingen hänsyn är tagen till detta systematiska fel i detta kapitel.
Figur 3 Skillnad i avstånd mellan GPS1(EGNOS) och GPS3(EPOS) 0 10 20 30 40 50 60 70 80 90 100 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Av stå n d ss killn ad (m ) Sträcka
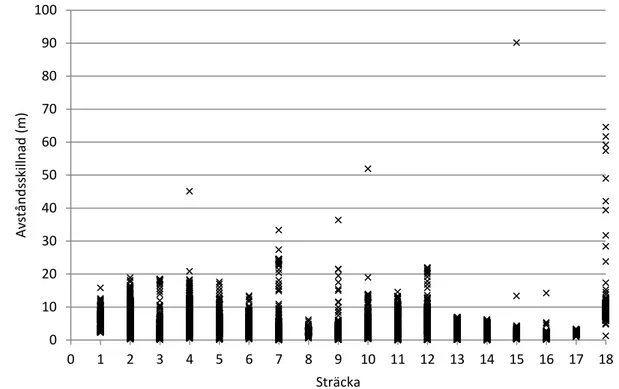
Figur 4 Skillnad i avstånd mellan GPS2(EGNOS) och GPS3(EPOS)
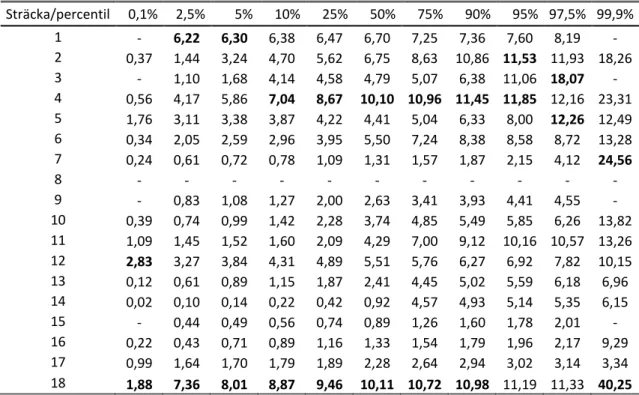
När man fördelar avståndsskillnaderna i percentiler, är det sträcka 4 och 18 som utmärker sig mest, eftersom det finns störst skillnader mellan positionerna på dessa sträckor. Detta gäller för båda GPS-mottagarna i jämförelse med referens-GPS:en.
Tabell 4 20 m-sträckornas avståndsskillnad (m) fördelat i olika percentiler GPS3-GPS1. FET text = de 2 största värdena av alla obs. (Kvalitet =0 (6), 1 eller 2)
Sträcka/percentil 0,1% 2,5% 5% 10% 25% 50% 75% 90% 95% 97,5% 99,9% 1 0,16 0,62 0,73 0,87 1,12 1,4 1,57 1,95 2,09 2,95 7,77 2 0,32 0,56 0,75 0,92 1,34 1,88 2,4 2,67 2,83 3,08 11,04 3 0,66 0,99 1,04 1,27 1,63 1,99 2,28 2,56 2,71 2,88 3,3 4 1,4 2,54 2,96 3,63 4,93 6 6,96 7,3 7,6 7,87 8,68 5 0,55 2,2 2,43 2,85 3,28 4,12 4,41 4,88 5,14 6,92 8,71 6 0,11 0,33 0,45 0,77 1,66 2,43 3,05 4,15 4,92 5,23 5,84 7 0,13 0,46 0,68 0,92 1,35 1,7 2,05 2,39 2,64 3,17 25 8 1,05 1,6 1,86 2,07 2,35 2,89 3,53 3,9 4,05 4,14 5,25 9 0,16 0,44 0,52 0,73 1,11 1,67 2,53 3,7 4,34 4,78 21,66 10 0,05 0,26 0,43 0,63 1,29 2,99 4,02 4,53 4,85 5,51 12,83 11 0,61 0,81 1,07 1,42 2,09 4,39 5,85 8 9,22 10,19 13,23 12 0,44 2,7 3,17 3,56 4,27 5,1 6,13 6,7 7,32 8,15 21,13 13 0,14 0,4 0,82 1,21 1,77 2,42 3,75 5,79 6,36 6,86 7,34 14 0,16 0,5 0,61 0,75 1,07 1,46 1,78 1,96 2,13 2,38 2,87 15 0,01 0,24 0,32 0,43 0,65 0,89 1,58 2,03 2,45 2,68 6,61 16 0,71 1,11 1,21 1,5 1,74 1,99 2,19 2,41 2,5 2,57 9,98 17 0,23 0,3 0,32 0,37 0,51 1 1,66 1,82 1,93 2,05 2,26 18 2,43 3,42 4,12 4,74 4,93 5,45 6,28 6,92 7,17 7,39 62,65 0 10 20 30 40 50 60 70 80 90 100 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Av stå n d ss killn ad (m ) Sträcka
Tabell 5 20 m-sträckornas avståndsskillnad (m) fördelat i olika percentiler GPS3-GPS2. FET text = de 2 största värdena av alla obs. (Kvalitet =0 (6), 1 eller 2)
Sträcka/percentil 0,1% 2,5% 5% 10% 25% 50% 75% 90% 95% 97,5% 99,9% 1 2,22 2,84 3,16 3,23 5,43 6,56 7,2 7,34 7,61 9,15 15,76 2 0,29 0,66 0,86 1,15 2,33 5,79 8,01 10,19 11,26 11,85 17,8 3 0,13 0,29 0,38 0,61 1,02 1,56 4,45 5,01 5,64 6,71 18,44 4 0,58 2,42 3,21 4,58 7,2 9,88 10,76 11,36 11,81 12,15 20,14 5 0,18 0,98 2,78 3,57 4,22 4,43 5,09 6,27 7,74 12,25 16,99 6 0,3 1,22 1,5 2,02 2,87 3,9 5,54 7,9 8,38 8,58 12,68 7 0,04 0,33 0,59 0,78 1,07 1,31 1,59 1,92 2,3 3,01 24,54 8 0,62 1,38 1,65 2,11 2,37 2,56 2,83 2,98 3,22 3,56 6,1 9 0,08 0,21 0,51 1,17 1,89 2,54 3,29 3,9 4,41 4,6 27,54 10 0,38 0,62 0,86 1,33 2,24 3,82 4,79 5,47 5,88 6,25 13,67 11 0,05 0,26 0,36 0,51 1,62 3,31 5,22 8,44 9,39 10,34 13,18 12 0,1 2,94 3,53 4,17 5,06 5,66 6,37 7,1 7,9 8,67 21,66 13 0,14 0,48 0,89 1,32 1,92 2,53 4,04 4,89 5,34 5,71 6,87 14 0,02 0,14 0,21 0,34 0,56 1 1,93 4,73 4,95 5,17 6,08 15 0,27 0,39 0,46 0,54 0,69 0,9 1,33 1,86 2,35 2,8 36,01 16 0,15 0,42 0,5 0,79 1,1 1,3 1,51 1,78 1,95 2,11 7,87 17 0,99 1,6 1,68 1,78 1,89 2,27 2,6 2,93 3,02 3,14 3,34 18 3,02 6,83 7,14 7,27 8,64 9,76 10,43 10,93 11,19 11,34 63,09
Tabell 6 och Tabell 7 visar fördelningen av avståndsskillnaderna i percentiler för de mätpositionerna där det har funnits bäst täckning för båda GPS:erna, dvs. kvalitet=2. Det visar sig att det är samma sträckor som utmärker sig, sträcka 4 och 18. Generellt sett ökade medianpunkten något (marginellt) förutom för de högsta percentilvärdena där värdena minskade.
Tabell 6 20 m-sträckornas avståndsskillnad (m) fördelat i olika percentiler GPS3-GPS1. FET text = de 2 största värdena av observationerna med högsta kvalitet (kvalitet=2) Sträcka/percentil 0,1% 2,5% 5% 10% 25% 50% 75% 90% 95% 97,5% 99,9% 1 - 0,65 0,74 0,88 1,12 1,39 1,56 1,92 2,04 2,35 - 2 0,32 0,55 0,74 0,91 1,34 1,87 2,40 2,66 2,82 3,05 10,91 3 - 0,98 1,01 1,10 1,54 1,90 2,20 2,39 2,60 2,78 - 4 1,40 2,55 2,98 3,65 4,94 6,01 6,96 7,30 7,60 7,87 8,68 5 2,13 2,61 2,82 3,14 3,39 4,13 4,41 4,87 4,99 8,28 8,71 6 0,11 0,33 0,47 0,78 1,68 2,47 3,07 4,17 4,94 5,25 5,84 7 0,51 0,75 0,89 1,15 1,41 1,72 2,05 2,36 2,55 2,84 24,95 8 1,05 1,60 1,87 2,07 2,38 2,92 3,54 3,90 4,04 4,11 4,40 9 - 0,58 0,99 1,27 1,65 2,29 3,27 4,19 4,67 4,83 - 10 0,06 0,44 0,58 0,83 1,52 3,22 4,07 4,55 4,92 5,66 12,90 11 0,61 1,07 1,51 1,94 3,87 4,82 6,04 8,46 9,80 10,27 13,37 12 1,85 3,11 3,38 3,74 4,29 4,98 5,96 6,41 6,85 7,32 10,06 13 0,14 0,41 0,86 1,22 1,80 2,42 4,19 5,94 6,46 6,90 7,38 14 0,16 0,50 0,61 0,76 1,08 1,46 1,78 1,96 2,13 2,38 2,87 15 0,01 0,29 0,39 0,51 0,68 0,89 1,52 2,00 2,44 2,66 2,95
Tabell 7 20 m-sträckornas avståndsskillnad (m) fördelat i olika percentiler GPS3-GPS2. Fet text = de 2 största värdena av observationerna med högsta kvalitet (kvalitet=2) Sträcka/percentil 0,1% 2,5% 5% 10% 25% 50% 75% 90% 95% 97,5% 99,9% 1 - 6,22 6,30 6,38 6,47 6,70 7,25 7,36 7,60 8,19 - 2 0,37 1,44 3,24 4,70 5,62 6,75 8,63 10,86 11,53 11,93 18,26 3 - 1,10 1,68 4,14 4,58 4,79 5,07 6,38 11,06 18,07 - 4 0,56 4,17 5,86 7,04 8,67 10,10 10,96 11,45 11,85 12,16 23,31 5 1,76 3,11 3,38 3,87 4,22 4,41 5,04 6,33 8,00 12,26 12,49 6 0,34 2,05 2,59 2,96 3,95 5,50 7,24 8,38 8,58 8,72 13,28 7 0,24 0,61 0,72 0,78 1,09 1,31 1,57 1,87 2,15 4,12 24,56 8 - - - - 9 - 0,83 1,08 1,27 2,00 2,63 3,41 3,93 4,41 4,55 - 10 0,39 0,74 0,99 1,42 2,28 3,74 4,85 5,49 5,85 6,26 13,82 11 1,09 1,45 1,52 1,60 2,09 4,29 7,00 9,12 10,16 10,57 13,26 12 2,83 3,27 3,84 4,31 4,89 5,51 5,76 6,27 6,92 7,82 10,15 13 0,12 0,61 0,89 1,15 1,87 2,41 4,45 5,02 5,59 6,18 6,96 14 0,02 0,10 0,14 0,22 0,42 0,92 4,57 4,93 5,14 5,35 6,15 15 - 0,44 0,49 0,56 0,74 0,89 1,26 1,60 1,78 2,01 - 16 0,22 0,43 0,71 0,89 1,16 1,33 1,54 1,79 1,96 2,17 9,29 17 0,99 1,64 1,70 1,79 1,89 2,28 2,64 2,94 3,02 3,14 3,34 18 1,88 7,36 8,01 8,87 9,46 10,11 10,72 10,98 11,19 11,33 40,25
Det visade sig att det var stor skillnad mellan de två GPS-mottagarna, därmed blir det ganska stora skillnader mellan GPS1 och GPS2. När de två GPS:erna med EGNOS jämfördes med GPS:en med EPOS var det minst skillnader mellan de sträckorna som kördes i Norra Sverige och för GPS1 som stämmer bäst överens med referens. I södra Sverige var det relativt stora skillnader i resultat mellan jämförelsen av de två GPS:erna med EGNOS och EPOS-mottagaren.
I medeltal ger GPS1 en position som skiljer sig från GPS3 med c:a 2,8 m vid GPS-kvalitet=2. Då är ingen hänsyn tagen till antennernas placering på mätbilen.
I medeltal ger GPS2 en position som skiljer sig från GPS3 med c:a 4,3 m vid GPS-kvalitet=2. Då är ingen hänsyn tagen till antennernas placering på mätbilen.
Skillnaden mellan GPS1 och GPS3 måste anses vara tillräckligt bra för det syfte positioneringen har i en mätbil. GPS2 rekommenderas inte att användas p.g.a. att mottagningen av korrektionstjänsten (EGNOS) är så pass mycket sämre än för en modern GPS (GPS1, OxTS RT3050).
5.3
Hur påverkar terrängen täckningen mellan EPOS och
EGNOS?
För att undersöka hur terrängen påverkar täckningen har sträckorna sorterats efter vilken karaktär de har.
Tabell 8 Sträckorna uppdelade på landskapets karaktär. Landskapskaraktär Sträcka
Öppet 1, 5, 11, 17, 18 Kuperat 2, 4, 7, 9, 10, 12, 13 Övrigt 3, 6, 8, 14, 15, 16
Några skillnader i landskapet som påverkar täckningen gick inte att se. För att studera hur noggrannheten påverkas av terrängen och geografiska skillnader sammanställdes Figur 5, den visar en beskrivning av sträckornas terräng, som är tagen från operatörens protokoll för varje sträcka, indelad i fyra olika färgkoder tillsammans med staplarna med medelskillnaden mellan GPS3 & GPS1 och GPS3 & GPS2.
Figur 5 Medelskillnaden mellan avståndet i meter mellan GPS1(EGNOS) och GPS3(EPOS) [Ljusa staplar] och mellan GPS2(EGNOS) och GPS3(EPOS) [mörka staplar], samt region och terrängindelning. Grön= Södra Sverige, Lila= Norra Sverige, Orange=Mellersta Sverige.
Skillnad i noggrannheten kunde ses, men inga slutsatser kan dras.
0 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Me d els killn ad (m ) Sträcknummer Bergsskärningar
Tät skog nära vägen (<50m) Enstaka träd nära vägen (<50m) Öppet landskap
5.4
Kan EGNOS ersätta EPOS?
Teracom har beslutat att avveckla tjänsten EPOS senast den 31 mars 2012, men här gjorda tester visar att EGNOS kan vara en möjlig ersättare. Det är en tjänst som varit tillgänglig sedan oktober 2009 och den minskar felen till ca 1,5 meter.
EGNOS skulle kunna ersätta EPOS eftersom de observerade skillnaderna mellan GPS1 och GPS3 uppvisar relativt måttliga skillnader. Man måste vara medveten om att resultatet kan variera ganska mycket mellan olika GPS-mottagare men skillnaderna är inte anmärkningsvärt stora. I detta fall är likheterna större mellan GPS1: OxTS RT3050 med EGNOS och referensen GPS3: Trimble AgGP332 med EPOS än vad skillnaderna GPS2 och referensen, GPS3 visade även fast de två sistnämnda är samma mottagartyp. Ett nytt europeiskt satellitnavigeringssystem, Galileo tas snart i bruk. Galileo har
utvecklats på uppdrag av Europeiska unionen (EU) och Europeiska rymdorganisationen (ESA). Galileo är tänkt att vara kompatibelt med de tidigare systemen GPS
(Amerikanskt system) och Glonass (Ryskt system) och ersätta/komplettera dessa i Europa. Det innebär att en GPS-mottagare som används idag ska kunna användas för att ta emot Galileo-signaler. Galileo skall möjliggöra positionsbestämning med
meterprecision över hela jordklotet och bestå av 30 satelliter jämfört med de 24 som dagens GPS-system använder. Hela systemet ska vara klart 2020.
6
Felkällor
Figur 6 visar att ibland kan positioneringen avvika. På denna bild över sträcka 18:s norra kant kan man se att GPS3 gör en kraftig avvikelse från vägen. Ordningen är från vänster GPS3, GPS1 och GPS2. Detta beror troligtvis på kvaliteten på positioneringen men det bidrar till att skillnaderna vid jämförelserna blir väldigt stor. Detta är ett fel som förekommer på flera sträckor.
Figur 6 Norra delen av sträcka 18, mellan Varberg och Falkenberg.
En annan felkälla som vi inte tagit hänsyn till vid beräkningen av skillnader i position i utvärderingen är att antennerna sitter på olika positioner på mätbilens tak. En skiss av antennernas placering på mätbilen visas i bilaga 3, Figur 3.1.
En annan felkälla som inte kunnat undersökas är hur mycket trädens löv stör EGNOS-mottagningen. Sannolikt är att EPOS-tjänsten fungerar bättre i skogsterräng under sommarmånaderna i jämförelse med en satellitbaserad korrektionstjänst.
Referenser
Esa, 2012. [Online] Available at: http://www.esa.int/esaNA/index.html [Accessed 2012-02-15].
TSIP 1999. TSIP Reference, Part Number 34462-00, Revision C, April 1999. [Online] Available at: http://www.trimble.com/agriculture/aggps-332-receiver.aspx?dtID =technical_support [Accessed 2012-02-14].
Bilaga 1 Sid 1 (2)
Avståndsjämförelse av GPS3 & GPS1 och GPS3 & GPS2 för de koordinaterna där realtidskorrektionen är aktiv för alla tre GPS-mottagarna.
QUAL 6 GPS1 QUAL 0 GPS2 QUAL 0 GPS3 Skillnad
Easting Northing Easting Northing Easting Northing GPS3-GPS1 GPS3-GPS2 374220,2 6155592 374220,7 6155594 374219,3 6155590 2,2 3,6 374220,5 6155573 374221,1 6155574 374219,2 6155571 2,0 3,5 374380,6 6147783 374382,7 6147791 374375,2 6147782 5,4 11,2 374389,8 6147766 374392,0 6147773 374384,4 6147765 5,4 11,5 374753,8 6147120 374755,8 6147129 374750,0 6147120 3,8 10,0 376039,2 6145115 376041,2 6145120 376037,8 6145115 1,4 5,3 446008,9 6175083 446010,0 6175083 446010,8 6175083 2,0 0,8 445549,7 6177978 445549,7 6177977 445549,1 6177977 1,4 0,8 445561,2 6177995 445561,1 6177993 445560,5 6177993 1,5 0,6 445737,8 6178262 445736,8 6178262 445738,0 6178259 3,1 3,4 445914,8 6178620 445915,5 6178620 445913,7 6178621 1,2 2,2 446006,6 6178907 446001,9 6178912 446004,1 6178908 2,8 4,9 446041,8 6179063 446045,5 6179072 446040,1 6179064 2,4 9,0 446045,5 6179082 446048,5 6179091 446043,3 6179084 2,8 8,5 446052,4 6179122 446054,7 6179129 446049,8 6179123 3,1 7,5 446055,6 6179141 446057,8 6179148 446053,1 6179143 3,1 7,0 446631,8 6184264 446633,0 6184267 446629,5 6184260 4,0 7,7 517349,8 6230868 517349,4 6230868 517349,0 6230867 1,3 1,5 517364,8 6230854 517364,5 6230855 517364,0 6230853 1,3 1,4 517379,7 6230841 517379,6 6230841 517379,0 6230840 1,3 1,4 532861,9 6229289 532864,4 6229291 532860,4 6229287 2,6 5,6 536834,6 6229944 536839,6 6229949 536833,4 6229942 2,3 9,4 533967,2 6477642 533968,7 6477646 533961,3 6477640 6,2 9,8 533987,2 6477639 533990,0 6477643 533981,5 6477637 6,2 10,6 534006,8 6477636 534010,8 6477640 534001,3 6477633 6,1 11,4 537615,3 6477056 537614,8 6477058 537615,3 6477057 0,5 1,4 537635,4 6477056 537635,1 6477058 537634,5 6477056 0,9 1,9 539155,0 6477081 539155,6 6477085 539151,5 6477076 5,6 9,5 539175,1 6477083 539177,1 6477087 539172,9 6477079 5,2 9,8 541706,0 6478119 541705,2 6478121 541702,8 6478115 4,6 6,3 558888,6 6487603 558886,5 6487603 558887,7 6487603 1,0 1,4 563561,3 6493157 563560,1 6493157 563558,3 6493154 4,4 3,5 563578,6 6493167 563576,8 6493167 563575,2 6493163 4,9 3,7 648339,0 6962376 648338,9 6962376 648338,5 6962376 0,5 0,5 648940,1 6965082 648940,6 6965082 648939,2 6965081 2,0 1,9 654988,1 6975104 654987,3 6975104 654983,0 6975105 5,2 4,4 657045,2 6977463 657045,2 6977462 657044,7 6977461 2,1 1,3 657351,4 6980416 657350,5 6980414 657351,3 6980424 8,0 9,5 657031,4 6982128 657033,0 6982127 657030,2 6982129 1,4 3,5 668472,4 6996183 668471,1 6996183 668470,5 6996184 2,0 0,8 672233,8 7008176 672232,9 7008175 672232,5 7008175 1,6 0,6 675212,5 7013319 675211,9 7013318 675210,9 7013319 1,6 1,1 830950,3 7321313 830948,7 7321314 830951,6 7321316 3,0 3,6
Bilaga 1 Sid 2 (2) 832429,4 7321882 832428,3 7321884 832426,0 7321884 3,9 2,4 833857,6 7323110 833857,8 7323111 833856,3 7323112 2,7 1,7 848127,0 7349218 848126,6 7349219 848133,8 7349221 7,3 7,4 716838,4 7538418 716840,4 7538416 716840,6 7538420 2,8 3,7 716821,3 7538429 716823,4 7538427 716823,4 7538431 3,2 3,9 471066,0 6958415 471067,5 6958417 471067,7 6958416 1,9 0,4 471052,3 6958401 471053,7 6958402 471054,1 6958401 2,0 1,0 338096,7 6333565 338097,8 6333567 338095,0 6333556 8,9 10,8 339203,2 6330187 339204,5 6330191 339203,5 6330185 2,4 7,0 339691,2 6327496 339692,0 6327501 339689,7 6327489 7,0 12,3 340214,6 6325865 340215,8 6325867 340213,2 6325861 4,6 7,1 340221,9 6325847 340223,1 6325849 340220,2 6325843 4,6 7,3 341353,8 6323491 341354,2 6323493 341349,8 6323487 5,6 7,1 342949,5 6319318 342949,7 6319323 342948,0 6319316 2,7 7,6 343630,1 6318029 343630,4 6318033 343626,0 6318025 5,5 9,2 344643,8 6316469 344645,8 6316474 344642,2 6316466 3,5 8,2 344655,9 6316453 344657,6 6316457 344653,2 6316450 4,4 8,7 348007,9 6313034 348003,0 6313037 348004,0 6313026 8,8 11,7 348024,1 6313022 348020,1 6313025 348020,2 6313015 8,6 10,4 350064,1 6311611 350064,1 6311616 350060,6 6311607 5,8 9,7
Bilaga 2 Sid 1 (1)
Figur 2 med fullständig skala
Kontrollsträckorna är plottade med det verkliga avståndet mellan varje loggning. x-axel = West – East och y-axel =North – South, enheten är meter.
Bilaga 3 Sid 1 (4)
Rapport - Test av korrektionstjänst
PM
Datainsamling för test av korrektionstjänst Unr 61781149354 g : \u p p d ra g \a k ti v a \i b m \g p s _ s tu d ie \l e v \r a p p o rt t e s t a v k o rr e k ti o n s tj ä n s t. d o c 1(4)
PM
Uppdrag Datainsamling för test av korrektionstjänst Beställare VTI
Från Christian Glantz Till Thomas Lundberg PM nummer 1
1. Allmänt
Ramböll RST har på uppdrag av Statens väg- och transportforskningsinstitut, VTI, genomfört en insamling av koordinater på ett antal utvalda sträckor i Sverige. Uppdraget är del i ett större uppdrag som syftar till utvärdera kvaliteten på en ny korrektionstjänst vid positionering med GPS.
Datainsamlingen genomfördes den 20-26 januari 2012 med ett fordon anpassat för uppdraget, se vidare kapitel 3 nedan för systembeskrivning. Rambölls del i uppdraget har varit samla in och sammanställa data från de utvalda sträckorna.
2. Sträckorna
Totalt har 18 stycken sträckor valts ut för uppdraget. Sträckorna är spridda över landet och har varierande karaktär. Sträckorna är beskrivna i tabell 2.1 nedan.
Tabell 2.1: Utvalda sträckor
Väg Sträcka Längd (m) Filnamn Karaktär
6 Malmö – Trelleborg 20 212 gps_001a Öppet slätt landskap 9/19 Simrishamn – Kristianstad 52 883 gps_002a Kuperat landskap 22 Ronneby – Karlskrona 25 908 gps_003a Kustlandskap 23 Kisa – Linköping 45 339 gps_004a Kuperat/bergskärning 4 Linköping - Norrköping 39 439 gps_005a Öppet slätt landskap 56 Katrineholm – Kungsör 47 971 gps_006a Tätare skogspartier 4 Härnösand – Örnsköldsvik 88 778 gps_007a Kuperad kust/bergsk. 4 Råneå – Töre 20 980 gps_008a Kustlandskap 10 Morjärv – Överkalix 31 901 gps_009a Kuperat/skogspartier 392 Överkalix - Pajala 104 769 gps_010a Kuperat/skogspartier
Datum 2012-02-06 Ramböll RST Skeppsgatan 5 211 11 Malmö T: +46-10-615 60 00 D: +46 (0)10 615 54 56 F: +46-10-615 20 00 www.ramboll.se Unr 61781149354 Ramböll Sverige AB Org nr 556133-0506
Bilaga 3 Sid 2 (4)
PM
Datainsamling för test av korrektionstjänst Unr 61781149354 g : \u p p d ra g \a k ti v a \i b m \g p s _ s tu d ie \l e v \r a p p o rt t e s t a v k o rr e k ti o n s tj ä n s t. d o c 2(4) 10 Kiruna – Abisko 89 983 gps_011a Öppet landskap
45 Jokkmokk – Väg 374 69 243 gps_012a Kuperat/skogspartier 45 Sorsele – Storuman 69 601 gps_013a Kuperat/skogspartier 45 Brunflo – Åsarna 58 006 gps_014a Varierande 45 Mora – Johannisholm 34 069 gps_015a Skogspartier 45 Torsby – Sunne 34 248 gps_016a Öppet landskap 45 Mellerud – Frändefors 22 954 gps_017a Öppet landskap 6 Varberg – Falkenberg 30 140 gps_018a Öppet landskap
3. Systemkonfiguration
För uppdraget användes ett fordon där totalt tre stycken GPS-mottagare var monterade. De tre mottagarna var följande:
GPS 1: OxTS RT3050 med EGNOS som korrektionstjänst GPS 2: Trimble AgGPS332 med EGNOS som korrektionstjänst GPS 3: Trimble AgGPS332 med EPOS som korrektionstjänst
GPS 2 och GPS 3 bestämmer alltså position med satellitnavigering medan GPS 1 använder tröghetsnavigering tillsammans med satellitnavigering för
positionering. Antennerna för respektive GPS var placerade på fordonet enligt figur 3.1.
Figur 3.1: Placering av antenner sett uppifrån 1 510 mm 1260 mm 905 mm GPS 2 GPS 3 GPS 1 Färdriktning
OxTS-enhetens mätcentrum sitter 500 mm till vänster om fordonets centrumlinje och 60 mm bakom antennens centrum. Insamlade koordinater för denna mottagare är i positionen för enheten och ej antennen.
Bilaga 3 Sid 3 (4)
PM
Datainsamling för test av korrektionstjänst Unr 61781149354 g : \u p p d ra g \a k ti v a \i b m \g p s _ s tu d ie \l e v \r a p p o rt t e s t a v k o rr e k ti o n s tj ä n s t. d o c 3(4)
Varje sträcka var indelad i mätsträckor på samma sätt som vid traditionell vägytemätning. I varje nodpunkt nollställdes längdmätningen och ett nytt länk-ID skapades. Detta skedde genom att systemet automatiskt identifierade koordinaterna i varje nodpunkt gentemot i förväg planerade koordinater. Koordinater från GPS 1 användes för detta ändamål.
4. Dataleverans
För varje sträcka finns sex filer. I tabell 2.1 redovisas hur de är namngivna. .gps1 innehåller data från GPS 1
.gps2 innehåller data från GPS 2 .gps3 innehåller data från GPS 3 a1.kml Google Earth-fil för GPS 1 a2.kml Google Earth-fil för GPS 2 a3.kml Google Earth-fil för GPS 3
Till varje sträcka hör även en mapp med digitala frontbilder. Mappen är namngiven med samma namn som respektive mätfil.
Koordinaterna är i koordinatsystemet SWEREF 99 TM. Filerna innehåller följande:
- Koordinat Easting - Koordinat Northing - GPS-höjd
- Fordonets riktning (heading) - HDOP - Antal satelliter - GPS-kvalitet - ID Från - ID Till - Vägnummer - Körfält - Länk-ID - Distans - Hastighet - FIFO-tid - PC-tid
GPS-kvaliteten redovisas på en skala mellan 0 och 2. För GPS 1 används dock 6 istället för 0 vilket innebär att tröghetsnavigering används fullt ut.
Bilaga 3 Sid 4 (4)
PM
Datainsamling för test av korrektionstjänst Unr 61781149354 g : \u p p d ra g \a k ti v a \i b m \g p s _ s tu d ie \l e v \r a p p o rt t e s t a v k o rr e k ti o n s tj ä n s t. d o c 4(4)
Leveransen innehåller även en fil kallad Noteringar.pdf . I denna finns för varje sträcka noteringar om väderförhållande (molnighet, nederbörd, temperatur), hur geografin/topografin var på sträckan samt datum och klockslag för när datainsamlingen skedde.
www.vti.se vti@vti.se
VTI är ett oberoende och internationellt framstående forskningsinstitut som arbetar med forskning och utveckling inom transportsektorn. Vi arbetar med samtliga trafikslag och kärnkompetensen finns inom områdena säkerhet, ekonomi, miljö, trafik- och transportanalys, beteende och samspel mellan människa-fordon-transportsystem samt inom vägkonstruktion, drift och underhåll. VTI är världsledande inom ett flertal områden, till exempel simulatorteknik. VTI har tjänster som sträcker sig från förstudier, oberoende kvalificerade utredningar och expertutlåtanden till projektledning samt forskning och utveckling. Vår tekniska utrustning består bland annat av körsimulatorer för väg- och järnvägstrafik, väglaboratorium, däckprovnings-anläggning, krockbanor och mycket mer. Vi kan även erbjuda ett brett utbud av kurser och seminarier inom transportområdet.
VTI is an independent, internationally outstanding research institute which is engaged on research and development in the transport sector. Our work covers all modes, and our core competence is in the fields of safety, economy, environment, traffic and transport analysis, behaviour and the man-vehicle-transport system interaction, and in road design, operation and maintenance. VTI is a world leader in several areas, for instance in simulator technology. VTI provides services ranging from preliminary studies, highlevel independent investigations and expert statements to project management, research and development. Our technical equipment includes driving simulators for road and rail traffic, a road laboratory, a tyre testing facility, crash tracks and a lot more. We can also offer a broad selection of courses and seminars in the field of transport.






![Figur 5 Medelskillnaden mellan avståndet i meter mellan GPS1(EGNOS) och GPS3(EPOS) [Ljusa staplar] och mellan GPS2(EGNOS) och GPS3(EPOS) [mörka staplar], samt region och terrängindelning](https://thumb-eu.123doks.com/thumbv2/5dokorg/4450738.108065/22.892.145.749.501.877/medelskillnaden-avståndet-egnos-ljusa-staplar-egnos-staplar-terrängindelning.webp)

