Akademin för Innovation, Design och Teknik
Kåpning till brandspaningsrobot
FUMO 3
Examensarbete, produktutveckling KPP106
15 högskolepoäng, avancerad nivå
Industriell formgivning Högskoleingenjörsprogrammet Innovation och produktdesign
Fredrik Almers
,Miguel Morrissey
Presentationsdatum: 14 jun 2013
Uppdragsgivare: Realisator AB Handledare (företag): Thomas Eriksson Handledare (högskola): Ragnar Tengstrand Examinator: Ragnar Tengstrand
Sammanfattning
Detta projekt har utförts på en 10 veckors period och ligger på C-nivå
(15högskolepoäng). Projektet gick ut på att ta fram ett kåpningsförslag för FUMO 3.
Under denna period har de första 6 veckorna bestått av konceptframtagning och bearbetning av koncept, och de sista 4 av själva prototypframtagningen.
Metoderna som använts för idégenerering och konceptframtagning har varit diverse produktutvecklingsverktyg. Då många ändringar och korrigeringar
gjordes framför allt gällande basplatta, IP-lådor och externa enheter ganska sent in i projektet kunde gruppen inte fastställa ett konceptförslag förrän närmare slutet av arbetet med detta projekt. Prototypframtagningsprocessen utfördes genom bockning med maskin och för hands samt hopsättning genom popnitning. Mallar för utklippta plåtbitar togs fram genom CAD-ritningar som sedan ritades ut på pappskivor, som sedan provades på roboten i förväg. Då arbetet med prototypframtagningen gjordes i största mån för hand så lämnade gruppen utrymme för felpassningar som kunde uppstå på grund av felklippta plåtar, felaktiga bockningskanter och radier, skissnoggrannhet och annat orsakat av den mänskliga faktorn. Som slutsats ser vi oss ändå nöjda med att ha uppflyllt kraven under den tid som var utsatt.
Förord
Vi vill tacka alla som varit med och bidragit till detta projekt genom kunskaper, vägledning och genuint intresse. Detta projekt har varit en väldigt dynamisk upplevelse då mycket har kommit att ändras under projektets gång, och gruppen därmed snabbt behövt anpassa sig till detta.
Vi vill tacka Sten Grahn som i produktutvecklingskurserna KPP017 och KPP039 gett oss en djupare förståelse av produktutvecklingsverktygen som vi flitigt tillämpat i detta projekt.
Vi vill tacka Henrik Lekryd som hjälpt oss med maskiner och verktyg i metallverkstaden.
Vi vill tacka Thomas Eriksson på AB Realisator och följande personer i projektet som varit till stor hjälp för oss:
Rolf Ericsson Affärs- och teknikkonsult Johannes Carlem Functional design
Tommie Olsson Functional design Jani Morko HMI
Mikael Hörlén HMI
Vi vill ge ett stort tack till vår examinator Ragnar Tengstrand, som varit ett stort stöd under detta projekt. Inte bara har Ragnar bidragit med sina kunskaper inom bockning och popnitning, utan även varit en tryggande och positiv röst för att komma över många svåra trösklar i detta projekt.
Ordlista
CAD
Computer aided Design. Ritverktyg för 3D ritningar och tekniska ritningar. DFMain (Design for Maintenance)
DFMain handlar om tillverkning anpassad för enkel service och underhåll. FMEA (Failure Modes and Effects Analysis)
Metod för att identifier möjliga felorsaker I en product/process. FUMO
Fumo är ett latinskt ord som betyder rök. Gantt schema
Planeringsschema för projekt. HMI
HMI är en förkortning för Human Machine Interface eller Människa Maskin Gränssnitt.
IP
IP är en kapslingsklassning och visar vilket skydd en el-artikel har emot damm och vatten.
QFD (Quality Function Deplyment)
Verktyg för jämförelse mellan koncept och konkurrenter. SolidWorks
Innehållsförteckning
1 INLEDNING ...8 1.1 AB Realisator ... 8 1.2 FUMO 1... 8 1.3 FUMO 2... 9 2 SYFTE OCH MÅL ...9 3 PROJEKTDIREKTIV ...9 4 PROBLEMFORMULERING ...9 5 PROJEKTAVGRÄNSNINGAR ... 10 6 TEORETISK BAKGRUND ... 11 6.1 PU-processen... 11 6.2 Planering... 12 6.2.1 Mötesprotokoll ... 12 6.2.2 Gruppkontrakt... 12 6.2.3 Gantt Schema ... 13 6.2.4 PIPS analys... 13 6.3 Problemförståelse ... 13 6.3.1 Marknadsanalys ... 14 6.3.2 Kravspecifikation ... 14 6.3.3 Funktionsanalys... 156.3.4 QFD (Quality function deployment)... 16
6.4 Idégenerering ... 17 6.4.1 Brainstorming... 17 6.5 Lösningsförslag ... 17 6.5.1 Pugh’s matris... 17 6.5.2 Konceptval... 18 6.5.3 FMEA ... 18
6.6 Bearbetning på valt koncept ... 18
6.6.1 Form ... 18
6.6.2 Materialval ... 18
6.6.3 DFMain ... 18
6.7.1 CAD ... 19 6.7.2 Prototyp ... 19 6.8 Referenser ... 20 7 TILLÄMPAD LÖSNINGSMETODIK ... 21 7.1 Planering... 21 7.1.1 Gruppkontrakt... 21 7.1.2 Gantt Schema ... 21 7.1.3 Mötesprotokoll ... 21 7.2 Problemförståelse ... 22 7.2.1 Marknadsanalys ... 22 7.2.2 Funktionsanalys... 22 7.2.3 Kravspecifikation ... 23
7.2.4 Quality Function Deployment (QFD)... 24
7.3 Idégenerering ... 25
7.3.1 Brainstorming... 25
7.4 Konceptgenerering ... 26
7.4.1 Pugh’s matris... 28
7.4.2 Konceptval... 28
7.4.3 FMEA (failure modes and effects analysis) ... 29
7.5 Bearbetning på valt koncept ... 29
7.5.1 Materialval ... 29
7.5.2 DFMain (Design for maintenance) ... 30
7.6 Konstruktion ... 31
7.7 Prototyp ... 32
8.8 Handtag ... 39
8.9 Prototypen... 39
9 ANALYS ... 40
10 SLUTSATSER OCH REKOMMENDATIONER ... 41
10.1 Rekommendationer ... 42
11 BILAGOR ... 44
11.1 Bilaga 1 - Gruppkontrakt... 44
11.2 Bilaga 2 - Gantt schema ... 46
11.3 Bilaga 3 - Brainstorming... 47
11.4 Bilaga 4 - QFD... 53
11.5 Bilaga 5 - Pugh's matris ... 54
11.6 Bilaga 6 - Funktionsanalys... 55
11.7 Bilaga 7 - FMEA ... 56
11.8 Bilaga 8 - Bearbetning av koncept (skisser) ... 57
11.9 Bilaga 9 - Prototypbygge... 71
11.10 Bilaga 10 - Konceptförslag renderingar ... 86
11.11 Bilaga 11 - Slutgiltigt konceptförslag renderingar ... 95
Figurförteckning
Figur 1: PU-processen ... 12
Figur 2: Gantt Schema... 14
Figur 3: Funktionsanalys ... 16
Figur 4: QFD ... 18
Figur 5: Pughs Matris ... 19
Figur 6: CAD ... 21 Figur 7: Funktionsanalys ... 22 Figur 8: Brainstorming ... 25 Figur 9: Konceptgenerering... 26 Figur 10: IP-lådor ... 28 Figur 11: Underlucka ... 29 Figur 12: Överlucka ... 29 Figur 13: Konstruktion ... 31
Figur 14: Prototyp papper1 ... 32
Figur 15: Prototyp papper2 ... 32
Figur 16: Resultat ... 33
Figur 17: FUMO3 Transparant 3D ... 34
Figur 18: FUMO3 Transparant framifrån ... 34
Figur 19: Sidkåpa ... 35
Figur 20: Främrekåpa ... 36
Figur 21: Batterilucka ... 36
Figur 22: HMI-lucka... 37
1 Inledning
Denna rapport behandlar den exteriöra designen och kåpningen för FUMO 3, som utförs på C-nivå på Mälardalens Högskola. FUMO 3 är den tredje
generationen av FUMO, som är en brandrobot vars primära uppgift är att spana i farliga miljöer där räddningspersonal inte bör skickas in.
Användning av robotar har ökat exponentiellt under de senaste decennierna inom framförallt industrin. Att förlita sig på robotar inom räddningstjänst kan låta skeptisk, men där människor inte bör vistas är robotar ett utmärkt substitut. Genom sensorer och kameror ska FUMO 3 kunna styras in bland komplicerade bränder och kunna skapa en bild för räddningstjänsten innan de tar sig in då rökdykning både är väldigt farligt och riskfyllt.
1.1 AB Realisator
År 2008 grundades AB Realisator av Thomas Eriksson, som ett resultat av de 25 års erfarenhet Thomas har inom forskning och utveckling från ett antal olika perspektiv. Företaget jobbar mycket med interaktioner mellan industri, akademi och samhälle. Tjänster som vanligtvis erbjuds mot industrier är hjälp med
strategier för samverkan med akademin, affärsplaner för samverkan mot industrin, kontakter med lämpliga partners inom akademin internationellt, vetenskapligt samarbete med akademin och processer för att utvärdera ett samarbete med akademin.
Mot forskare och forskningsorganisationer erbjuds tjänster som affärsplaner, marknadsundersökningar, marknadsföring, marknadsutveckling, patent och varumärkesfrågor, kundkontakter m.m.
AB Realisator erbjuder även hjälp till forskningsfinansierings-organisationer med utvärdering av finansieringsverksamheten
1.2 FUMO 1
FUMO 1 projektet startades 2011 av AB Realisator, där det samarbetades med några svenska brandkårer, robotdalen, Mälardalens Högskola och Örebro universitet. FUMO 1 var menad som en kompanjon till rökdykaren, men kom sedan att bli mycket mer än så. Demo 1 av FUMO 1 hade fjärrstyrning, förmågan att gå i trappor med hjälp av två flipprar, kunde tillse operatören med video och IR bilder, samt att den hade ett väldefinierat interface mot funktionalitet (Can, USB och ethernet)
1.3 FUMO 2
Vidareutvecklingensprojektet av FUMO 1 syftade till att vidareutveckla denna brandrobot som är av ett kommersiellt intresse för brandförsvaren. Säkerheten skulle ökas och kostnader för besvärliga bränder skulle sänkas genom att denna robot skulle vara till hjälp vid rökdykningen. Till Demo 2 så tillkom en
laserskanner vars uppgift är att kartlägga utrymmet som brandroboten befann sig i.
2 Syfte och mål
Syftet med detta examensarbete är att utföra kåpningen till FUMO 2’s
efterföljare, FUMO 3. Denna kåpning skall vara utformad med hänsyn till de alla olika interna och externa enheterna samt basplattan. Detta kommer att
åstadkommas genom att ta fram CAD-modeller på olika koncept till att börja med, för att sedan skala bort koncepten en efter en genom att använda och tillämpa olika produkt- och konceptgenereringsverktyg. Mot projektets slut skall ett fysiskt kåpförslag tagits fram genom bockning och nitning och/eller svetsning. Allt arbete kommer att utföras efter de önskemål och krav som AB Realisator ställer.
3 Projektdirektiv
Detta examensarbete omfattar 15 högskolepoäng. Då detta projekt endast hålls i 10 veckor finns vissa begränsningar på vad som skall åstadkommas. Projektet skall redovisas med hjälp av en skriftlig rapport och muntlig presentation. Även en opponering skall genomföras på ett annat examensarbete.
Delproblem
Hur kan designen bidra till en dränerad konstruktion. Hur ska designen ta hänsyn till kabeldragning.
Hur skall roboten utformas för att hålla ett formspråk som tilltalar användare och förmedla produktimage.
Hur skall designen skydda komponenterna
Hur skall designen på kåpningen bidra till enkel förflyttning
5 Projektavgränsningar
Projektgruppen kommer att avgränsa sig till själva kåpningen för FUMO 3. Dock så krävs det en samverkan med övriga deltagande i FUMO 3 projektet för att anpassa kåpningen till andra delar av FUMO 3.
Den exteriöra designen tar hänsyn till den tänkta tilten för kamerorna som skall sitta ovanpå kåpningen.
Den exteriöra designen skall ta hänsyn till diverse olika tekniska lösningar som FUMO 3 skall inneha. Samt ge kåpningen en design som talar för AB Realisators image.
Det slutliga konceptet kommer att presenteras i form av en prototyp framtagen genom 3D-CAD modeller.
Då vikten ligger i att ta fram en prototyp till examinationsdatumet kommer den större delen av detta projektarbete tillägnas åt själva hantverket än att fokusera på att ta fram den teoretiskt bästa lösningen till kåpningen.
6 Teoretisk bakgrund
6.1 PU-processen
Produktutvecklingsprocessen är uppdelad i 6 viktiga faser, där varje fas har olika ingående moment. Under projektarbetets gång kan dock en del hoppande föregå mellan de olika faserna, där bästa exempel är QFDn, som återkommer rätt ofta under projektets gång. Se Error! Reference source not found.
Planering • Gruppkontrakt • Gannt Schema • Mötesprotokoll Problemförståelse • Marknadsundersökning ∙ QFD • Kravspecifikation • Funktionsanalys Idégenerering • Brainstorming Lösningsförslag • Konceptgenerering ∙ Konceptval • Pugh's Matris ∙QFD forts. • FMEA Bearbetning på valt koncept • Form ∙ DFMain • Val av material • Tillverkningsmetod ∙DFA
6.2 Planering
En väl utförd planering är grundstenen för att ett projekt skall flyta på ordentligt. Detta styrs upp av ett gruppkontrakt som varje gruppmedlem läser igenom och skriver under, ett gantt schema för att få en bild av tidsåtgången för varje fas i projektet och mötesprotokoll där det redogörs för vad som har gjorts, vart projektet ligger i dagsläget och vad som skall göras till nästa möte.
6.2.1 Mötesprotokoll
Mötesprotokoll skrivs för att vid vissa tillfällen i projektets gång göra
uppföljningar på vad som gjorts och vad som skall göras till nästa möte. Genom att titta på ganttschemat och möteprotokollet kan det kontrolleras om projektet är i fas eller inte.
6.2.2 Gruppkontrakt
När en grupp formats så tilldelar man grupproller och skriver gruppkontrakt. Detta görs för att underlätta projektets gång genom att i tidigt skede klargöra för alla delaktiga projektmedlemmar vad var och en har för ansvarsområde och de krav som ställs på varje individ. I gruppkontraktet bestäms även hur frekvent gruppmöten bör has och hur kommunikation mellan gruppmedlemmar skall ske. Detta är för att undvika eventuella missuppfattningar och/eller misslyckande att kommunicera, då gruppen ideligen uppdaterar varandra på projektets
6.2.3 Gantt Schema
I projektets start bör även ett ganttschema utformas. Ett ganttschema visar de olika delmomenten som grafiska staplar i en tidslinje samt beroenden mellan de olika projektdelarna. Detta ger en ungefärlig bild på hur mycket tid man bör lägga ned på varje delmoment i projektet, och hur den tiden bör disponeras. Det kan vara väldigt svårt att följa ett ganttschema exakt, det kan visas att vissa faser ibland tar längre tid än vad som disponerats, och andra faser går fortare än förutspått. En väl utförd planering innan ett ganttschema utförts kan minimera felaktiga förutsägelser. Se Error! Reference source not found.
Figur 2
6.2.4 PIPS analys
Under projektarbetets gång skall även en PIPS analys göras av samtliga gruppmedlemmar tillsammans. En PIPS analys är en typ av utvärdering på projektet och projektarbetet. Grupprelaterade och uppgiftsrelaterade frågor ställs på gruppen som sedan besvaras på en skala från 1 till 5. 1 står för ”inte alls”, och 5 står för ”fullständigt”. Här är det viktigt att alla får säga det dem tycker, då vissa delar kan uppfattas olika från varje gruppmedlem. Ett sätt skulle
6.3.1 Marknadsanalys
I en marknadsanalys undersöks vad marknaden och kunden vill ha samt vilka konkurrenterna är. Genom att ha bra vetenskap om den befintliga marknaden kan konkurrensen enklare mötas. Marknadsanalysen kan utföras i form av intervjuer, studiebesök, enkätutskick etcetera. När svar samlats in så sammanställs dessa och ger då en klarare bild av vad marknaden verkligen tycker. Viktigt är också att det inte utformas frågor från vad en själv tycker är viktigt. Det kanske finns andra aspekter kring problemet än vad som gruppen själv tänker på, eller om något som saknas på marknaden. Därför är det viktigt att ställa öppna frågor där friheten finns att svara brett och öppet..
Från de sammanställda svaren som fås från marknadsanalysen kan därefter en kravspecifikation, och en QFD utformas.
6.3.2 Kravspecifikation
En kravspecifikation är ett dokument där kraven som ställs på produkten eller tjänsten listas. Här listas krav som ställs dels från uppdragsgivaren, men även krav som sammanställts utifrån marknadsundersökningen. Här görs en marknadsbedömning där man tar talar om vilka man väljer att rikta sig åt.
6.3.3 Funktionsanalys
Funktionsanalysen listar de funktioner som produkten ifråga kommer att ha utan någon koppling till hur det skall uppfyllas. Denna görs vanligen i början av ett projekt då alla olika funktioner kan undersökas i tidigt skede. Funktionsanalysen läggs upp så att den får en huvudfunktion, som sedan måste uppfyllas med hjälp av delfunktioner, som i sin tur måste uppfyllas av underfunktioner.
Stödfunktioner finns också, och dessa är inte kritiska, men kan höja värdet av produkten för slutkunden. Detta bildar ett träd av funktioner som alla kopplas till huvudfunktionen, där varje gren har sin egen betydelse. Se Figur 3
6.3.4 QFD (Quality function deployment)
En QFD bör påbörjas så fort marknadsundersökningen är klar. QFDn är ett av de större och mer komplicerade PU-verktygen och detta verktyg kommer att följa med projektgruppen ganska långt igenom projektets gång. Det vitala i detta verktyg är att vikta de krav som tagits ur kravspecifikationen och
marknadsundersökningen. Det kan ibland vara svårt att uppskatta vikten på vissa krav, vilket gör detta verktyg till ett bra verktyg att överskådligt och ungefärligt se skillnader mellan egna koncept och konkurrenter. Genom att ha gjort en större och mer utförlig marknadsundersökning kan det gå lättare att vikta kundkraven.
De egna koncepten och konkurrenterna (om det finns några) sätts in i QFDn för att se hur väl de uppfyller marknadskraven och produktegenskaperna, och detta görs då efter idégenereringen när gruppen har några koncept.
Produktegenskaper är tekniska egenskaper på produkten.
När konkurrenter satts in i QFDn så tittar man på hur väl de uppfyller de olika kundkraven samt produktegenskaperna. Därefter kan man med hjälp av en graf (vilket underlättar) se skillnaden mellan de egna koncepten och konkurrenternas lösningar. SeFigur 4
16
6.4 Idégenerering
6.4.1 Brainstorming
När problemförståelsefasen är över så kan man börja idégenerera. Denna fas handlar om att få fram alla idéer från alla gruppmedlemmarna. Här bör man inte fokusera så mycket på att lösa problemet, utan snarare att vara lite mer kreativ och tänka utanför ramarna. Ett sätt att göra detta är genom brainstorming då man bara kläcker ur sig alla möjliga olika idéer. Ur idégenerering kan man sedan kombinera vissa idéer och testa sig fram på olika möjliga koncept.
6.5 Lösningsförslag
Under denna fas börjar man titta närmare på några få koncept och jämföra dessa med varandra och med konkurrenter.
6.5.1 Pugh’s matris
Förslagen som kvarstår kan sedan sättas in i en så kallad Pugh’s matris. I denna så använder man sig av en referens, som kan vara någon befintlig konkurrerande produkt, eller ett eget koncept. Man väger sedan koncepten mot referensen om de uppfyller kravspecifikationen bättre, lika bra eller sämre. På referensen sätts krav-vikten på ”0”. För att sedan jämföra de övriga koncepten mot referensen så sätts antingen ”+1” om det är bättre än referensen, ”-1” om det är sämre än referensen och ”0” om det är lika bra som referensen. Det koncept som slutar med högsta värde är det konceptet som uppfyller kraven bäst.
Efter konceptgenereringen kan även som nämnt innan de valda koncepten sättas in i QFD och mätas mot marknadskraven samt produktegenskaperna. Se Figur 5
6.5.2 Konceptval
Under konceptvalsfasen så får sedan gruppen göra en bedömning på vilket koncept man ska gå vidare med. Här används QFDn och Pugh’s matrisen som hjälp, samt lite magkänsla.
6.5.3 FMEA
Då ett koncept har valts fram så görs sedan en FMEA, där man tittar på
eventuella fel som kan uppkomma hos produkten. Där sätter man även vikt för att se hur allvarliga felen är. Här kan man då komma fram till lösningar för de eventuella fel som kan uppkomma.
6.6 Bearbetning på valt koncept
Under denna fas går man in på detaljer på det valda konceptet. Form, funktion, material, tillverkning m.m.
6.6.1 Form
Produktens form och dess detaljer har en stor betydelse och här kan
projektgruppen diskutera fram och rita/skissa hur det bästa sättet är att designa det tänka konceptet. Under denna fas kommer CAD att ha stor betydelse då man ibland kan gå in på väldigt detaljerat på konceptet vilket kan vara svårt att skissa fram. Genom att använda CAD kan man göra simuleringar och sprängskisser för att enkelt se hur detaljer ska föras samma och/eller hur de sitter på platts.
6.6.2 Materialval
Materialvalet är viktigt att gå igenom för få en hållbar produkt som samtidigt uppfyller alla de krav som produkten har på bästa sett.
6.6.3 DFMain
DFMain är förkortat för ”Design for Maintenance”. Design for maintenance handlar om att tillverka så att det blir lätt att underhålla och att produkten skall vara byggd så att minimalt antal delar tar skadan vid felanvändning. Ju mindre delar som måste bytas ju billigare blir det.
6.7 Konstruktion
6.7.1 CAD
För att tydliggöra konceptet används lämpligen CAD. Här kan man i detalj utforma konceptet med precisa mått och förhållanden. I CAD skapar man tekniska ritningar som sedan används vid produktion. Man kan även göra yt- renderingar och transparenta bilder för att se hur allt är uppbyggt och skall sitta. Även simuleringar kan göras för att se vart de största påfrestningarna sitter. Nedan visas en bild ur CAD programmet SolidWorks 2007. SeFigur 6
6.8 Referenser
Ullman, David G. (2010) The mechanical design process fourth edition. McGraw-Hill Companies, Inc, New York
Projektrapport från KPP017 – Produktutveckling 2, grupp 1.
Individuell Design handbok från KPP017 – Produktutveckling 2, Miguel Morrissey
http://solidsmack.com/design/3d-scanning-solidworks-medical-prosthetics/
http://www.realisator.se/
7 Tillämpad lösningsmetodik
7.1 Planering
7.1.1 Gruppkontrakt
Vid projektets start utformade gruppen ett kontrakt för att underlätta projektets genomskridande. I gruppkontraktet behandlades grupproller, besluttagande, tvister, sjukdom, raster, arbetstid, kontakt och misskötsel. Se gruppkontrakt som bilaga.
7.1.2 Gantt Schema
I början av projektet gjordes ett ganttschema för att dels få struktur på vad som skulle göras, men framför allt för att kunna bedömma hur mycket tid man bör lägga ned på varje process för att kunna hålla deadline. Ganttschemat avser en 10 veckors period, som detta projekt på B-nivå sträcker sig över. I ganttschemat behandlas de flesta delar som faller under raportskrivningen, samt när
presentation av projektet och opponering skall göras.
7.1.3 Mötesprotokoll
Gruppen skrev mötesprotokoll vid några få projektmöten för att kolla av med ganttschemat vart i projektet gruppen låg till. Då gruppen träffades dagligen under en längre tid ansåg man att mötesprotokoll vid varje träff var överflödigt. Mötesprotokollen skrevs av bägge gruppmedlemmarna. Det viktigaste i
mötesprotkollen i detta projekt var avstämningen med ganttschemat, och där lade gruppen den största fokusen.
7.2 Problemförståelse
7.2.1 Marknadsanalys
Projektgruppen hade kontakt med uppdragsgivaren när det kom till marknadsanalysen, och enligt uppdragsgivaren var det vissa krav som var speciellt viktiga på marknaden, de viktigaste kraven som projektgruppen för kåpningen kände att de kunde påverka var:
Lätt att serva Enkel att förstå Hållbar konstruktion
7.2.2 Funktionsanalys
Funtionsanalysen gjordes likt ett träd, där huvudfunktionen lades överst. Under huvudfunktionen lades delfunktioner som skall uppfyllas, dessa hade sedan underfunktioner som bidrar till att uppfylla dessa delfunktioner. Se Figur 7
Kåpning för chassi och komponenter
Robusthet Tillåta mobilitet
Stöttålig Klara olika miljöer Förhindra störning av
flipprar
Förhindra störning av synfällt för kamera
Tillåta transport upp- och nedför trappor
Bärande Dränerad
Yta ovanpå för externa komponenter
Genomtänkt
konstruktion Hål i bottenplattan förhindra uppsamling av vätskor
Flyttbar
Greppvänlighet Förvaringsbar
22
7.2.3 Kravspecifikation
För att kunna ta fram en kåpning som vår uppdragsgivare samt slutkund vill ha så har vi samlat ihop alla olika krav och önskemål från ett flertal källor. De flesta kraven som vi fått från uppdragsgivaren Thomas Eriksson på Realisator AB, har vi absorberat under projektmöten, dels från Thomas själv men även från övriga projektdeltagare.
Under arbetets gång så har några av dessa krav och begränsningar kommit att ändras, då till exempel arbetet kring basplattan och lådorna för mekatroniken inte färdigstäldes förrän lång senare in på projektet. Detta ledde till att vårt kåpningsarbete inte kunnat färdigställas förrän det slutgiltiga konceptet för basplattan färdigställts.
Den input vi fick till vår kravspecifikation var: AB Realisator
Funktionsanalys QFD
Kunden (brandförsvaret)
Nedan listas de krav på kåpningen som vi har samlat in.
7.2.3.1 Generella krav
Skall tåla belastningar
Skall verka som ett komplett skydd för komponenterna Skall vara stöttålig
Skall vara rostfri
Skall vara enkel att serva Skall vara portabel
7.2.3.2 Konstruktionskrav
Skall ha tillräcklig yta för placering av tilt, kameror och sensorer
7.2.4 Quality Function Deployment (QFD)
Då vi samlat ihop och sammanställt marknadskraven för FUMO 3 så viktades de olika kraven. Vid viktning av kraven så var de viktigare kriterierna:
Skall ha yta för kameror och sensorer
Att den skall vara anpassad för basplattan, batteri och HMI Att den skall vara robust
Att den skall vara lättmonterad
Att den skall ha standardiserade fästytor för kameror och sensorer Att den skall möjliggöra avrinning av vätskor
Vid konkurrentjämförelse valde vi att bortse från potentiella konkurrenter och istället titta och jämföra mellan egna koncept och FUMO 2.
För att sedan titta på egenskapsvikten så säger QFDn att former har den största betydelsen hos brandroboten, då former har stor betydelse för anpassning till basplatta, batteri och HMI, samt att det skall finnas tillräcklig yta för externa enheter, vilket är två viktiga krav.
Nedan visas kraven som listades i QFDn. Se Tabell 1
Tabell 1
De koncepten som jämfördes i QFDn numrerades och listas i nästa stycke, under konceptgenerering.
7.3 Idégenerering
7.3.1 Brainstorming
Denna del utfördes genom brainstorming då gruppen började med att skriva ut ett flertal bilder på FUMO 2 där kåpan likt den verkliga endast var en fyrkantig låda. Gruppen kunde sedan använda sig av denna låda för att rita och skissa över med nya fräscha idéer. I denna fas tänkte gruppen inte på några krav utan lät fantasin ta över och ge en "outside the box" effekt. Se Figur 8
7.4 Konceptgenerering
Under konceptgenereringen presenteras alla olika idéer med skisser och diskussioner. Förslagen kontrolleras sedan mot kravspecifikationen och funktionsanalysen. Efter att vissa förslag sållats bort eller kombinerats, så återstår några få koncept. Visualiseringen av koncepten gjordes med hjälp av SolidWorks för att få koncepten i 3D. Se Figur 9
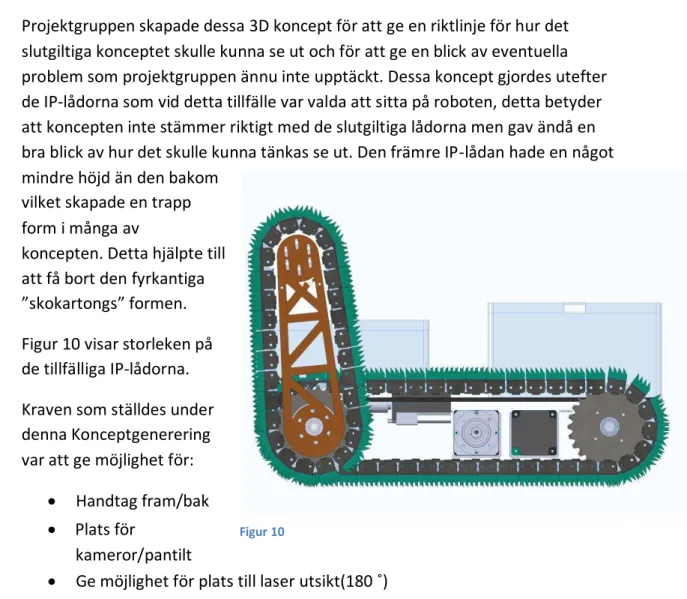
Projektgruppen skapade dessa 3D koncept för att ge en riktlinje för hur det slutgiltiga konceptet skulle kunna se ut och för att ge en blick av eventuella problem som projektgruppen ännu inte upptäckt. Dessa koncept gjordes utefter de IP-lådorna som vid detta tillfälle var valda att sitta på roboten, detta betyder att koncepten inte stämmer riktigt med de slutgiltiga lådorna men gav ändå en bra blick av hur det skulle kunna tänkas se ut. Den främre IP-lådan hade en något mindre höjd än den bakom
vilket skapade en trapp form i många av
koncepten. Detta hjälpte till att få bort den fyrkantiga ”skokartongs” formen. Figur 10 visar storleken på de tillfälliga IP-lådorna. Kraven som ställdes under denna Konceptgenerering var att ge möjlighet för:
Handtag fram/bak Plats för
kameror/pantilt
Figur 10
Ge möjlighet för plats till laser utsikt(180 ˚) Inte förhindra mobilitet
Få bort ”skokartongs känslan” Enkel tillverkning
Slutsatsen efter Konceptgenereringen gjordes med hjälp av diskussioner med handledare och chassiprojektgruppen men framförallt med hjälp gruppens QFD och Pugh’s matris. Det projektgruppen kom fram till var att koncept 8 uppfyllde många krav bra och gav ifrån sig ett seriöst och professionellt utryck och ändå
7.4.1 Pugh’s matris
Med de 8 koncepten som gruppen tog fram så jämfördes de sinsemellan i en Pugh's matris. Som referens sattes koncept 8 som var ett av de vinnande koncepten i QFDn.
Koncept 1 var bättre anpassad för basplattan, batteri och HMI. Koncept 2 var mer lättmonterad.
Koncept 4, 5 och 7 hade bättre yta för kameror och sensorer.
Koncept 5 tålde belastningar bättre, hade bättre åtkomst för batteri, var mer robust och hade lättare åtkomst för HMI.
Koncept 6 gav ett bättre skydd mot komponenterna och var lättare portabel.
Utifrån dessa observationer så bearbetade gruppen vidare på koncept 8. Det man kunde se på koncept 1 till skillnad från de andra koncepten var att det fanns en större yta på höjden innanför kåpningen, vilket är fördelaktigt om kablage eller liknande sticker ut från lådorna. Däremot hade detta koncept många fasningar och lutningar som förmodligen skulle försvåra montering men även tillverkningen. Något annat som gruppen kunde se på koncept 4, 5 och 7 var den plana breda ytan som skulle löna sig vid montering av externa enheter. Detta såg gruppen som ett av de viktigare argumenten. Koncept 5 var uppbyggd som legokloss på legokloss, med ett utseende av en pansarvagn. Detta koncept bestod av många kanter och delar och skulle bidra till en styvare konstruktion. Koncept 6 olikt de andra koncepten hade två skenor som skydd på vardera sida som skulle bidra till något mindre typ av skydd för de externa enheterna. Problemet med dessa var att de kan komma att skymma sikten beroende på höjden av skenorna och höjden på kameran.
7.4.2 Konceptval
Utifrån QFDn och Pugh's matrisen kom gruppen fram till att koncept 8 hade de bästa delarna av de olika koncepten och därmed valde gruppen att jobba vidare och utveckla detta koncept. Bilderna nedan visar hur konceptet såg ut i denna period i processen innan projektgruppen började vidareutveckla konceptet.
7.4.3 FMEA (failure modes and effects analysis)
När ett koncept valts fram så gjordes en FMEA för att se eventuella fel som kan förekomma och vilka rekommenderade åtgärder som bör tas. Se Tabell 2
Tabell 2
7.5 Bearbetning på valt koncept
7.5.1 Materialval
Till kåpningen har gruppen valt att använda rosfritt stål. Detta på grund av dess slitstarka yta och att den inte behöver ytterligare behandling. Att stålet är korrosionsbeständigt är också ett en viktig egenskap med hänsyn till den miljö den kommer att befinna sig i.
7.5.2 DFMain (Design for maintenance)
Kåpning för FUMO 3 är utformad för att enkelt kunna underhålla batteri,
motorer och HMI. Åtkomsten för batteri och HMI fås genom att lyfta på ”locket” som de externa enheterna sitter på. Detta görs genom att skruva loss locket på vardera sidan innan det lyfts. Åtkomsten till motorerna och hela underredet görs genom att en skjut-lucka dras av på baksidan av FUMO 3. Även detta lock sitter fastskruvat.
Figur 11visar hur
undersidan skruvas fast mot kåpningen. Figur 12 visar hur ovansidan skruvas fast, samma princip gäller även på baksida ovansida
Figur 11
7.6 Konstruktion
För att realisera konceptet gjordes 3D-CAD modeller. Dessa CAD-ritningar gjordes för att skapa en bättre bild av hur det skulle fungera i verkligheten. Även tekniska ritningar togs fram för framtida tillverkning av kåpningen. Se Figur 13
7.7 Prototyp
När det slutgiltiga konceptet tagits fram skall det skapas en prototyp av detta. Protypen skall skäras/klippas för att sedan bockas. Bockning kommer att ske manuellt med hjälp av en bockningsmaskin. Vissa komplicerade bockningar kommer att ske helt för hand genom slagdeformering. Sammansättning av kåporna kommer att ske genom popnitning och skruv. Fogarna som blir av ojämnheter skall sedan fyllas med en form av tätningsmassa.
För att se hur kåpningen skulle se ut i verkligheten gjordes det en pappersmodell utifrån CAD-ritningarna innan bockningsprocessen. Se Figur 14 och Figur 15
Figur 14
8 Resultat
Resultatet av detta projekt blev en prototyp utformad efter en 3D CAD modell. Prototypen togs fram genom bockning och popnitning. Bockningen gjordes med hjälp av en bockningsmaskin men även för hand. I bockningsmaskinen gjordes bockningsvinklarna efter ögonmått, vilket ledde till att exakta vinklar var svårt att uppnå. Se slutkoncept Figur 16
Figur 17
FUMO 3 består av sex betydelsefulla kåpningar. Sidokåpa Batteri lock HMI lock Kåpning för kamera Underkåpa Locköppning underkåpa 8.1 Sidokåpa
Själva sidokåpan är den huvudsakliga kåpan där de flesta andra kåpor sitter mot. Kåpan är fäst mot basplattan med hjälp av invikta kanter. FUMO 3’s front är en del av sidokåpan, denna är fäst mot sidostycket genom popnitning. Sidokåpan har invikta kanter upptill som fungerar som lut stöd för batteri- och HMI locken. Baktill på sidokåpan är kanterna högre för att ge en höjdskillnad mellan främre och bakre delen av FUMO 3. På framsidan av sidokåpan finns ett hålutrymme där laserskannern skall sitta. Se Figur 19 och Figur 20
Figur 20
8.2 Batteri lock
Batterilocket är likt ett tak och sitter fastskruvat mot sidokåpan genom att det lutas mot de invikta kanterna som sidokåpan bidrar med. Se Figur 21
Figur 21
8.3 HMI lock
Locket för att komma åt HMI är likt batteri locket, med undantaget att det är något större och har nedvikta kanter framtill som skall täcka springan som blir på grund av höjdskillnaderna mellan främre och bakre delen av kåpningen. I denna kåpa finns det hål för montering av kamera. Se Figur 22
Figur 22
8.4 Kåpning för kamera
Kåpningen för kamerorna följer samma form som huvuddelen av kåpningen för FUMO 3. Denna kåpning har ett sneddat klipp på den främre delen och går ut nedför sidorna över pantilten. Kåpningen är fäst mellan pantilten och kamerorna på baksidan. Se Figur 23
8.5 Underkåpa
Underkåpan döljer motorerna och hela underredet. Dessa har spår på vardera sidan för att ge rum för att kunna spänna motorerna. Se Figur 24
Figur 24
8.6 Lucköppning underkåpa
För att komma åt hela underredet av FUMO 3 finns en lucköppning på
undersidan. Denna lucka sitter fäst mot underkåpan genom att skruvas fast på vardera sidan. Se Figur 25
8.7 Övriga kåpor
Borstsett från de sex huvudsakliga kåporna finns även två kåpor för att täcka drivbanden. Vid tillverkningen av prototypen gjordes kåporna uppdelat i flera delar som sedan popnitades ihop. Vid industriell tillverkning av kåpningen kan det tänkas att uppdelning görs annorlunda för enklast möjliga bockning och montering. Vid prototypframtagningen gjordes sidokåpan i fyra stycken och underkåpan i fyra stycken, de övriga fyra huvudkåporna gjordes som hela stycken.
Hantag
8.8 Handtag
Handtaget fram sitter under den främre kåpan och ger ett bra grepp för en hand med arbetshanske. Handtaget sitter fast i mittenplattan för att kunna klara av tyngden under lyft.
Handtaget baktill sitter även i mittenplattan och ger en ungefär lika stor grepp yta.
8.9 Prototypen
I denna del visas ett grovt resultat av bockningarna. Dessa plåtar har en vit skyddsplast som sedan tas bort lagom till att dekaler sätts på strax innan slutpresentation. Se Figur 26 och Figur 27
9 Analys
I problemformuleringen listades följande huvud- och delproblem: Huvudproblem
Hur ska chassit vara utformat för att passa alla olika komponenter och enheter och samtidigt vara justerbar för att till exempel byta batteri utan att lyfta hela chassit.
Delproblem
Hur kan designen bidra till en dränerad konstruktion. Hur ska designen ta hänsyn till kabeldragning.
Hur skall roboten utformas för att hålla ett formspråk som tilltalar användare och förmedla produktimage.
Hur skall designen skydda komponenterna
Hur skall designen på kåpningen bidra till enkel förflyttning
9.1 Allmänt
Huvudproblemet i detta projekt har lösts genom ett starkt sammarbete med HMI gruppen och chassi-design gruppen. Kåpningen utformades mycket efter form på basplatta, IP-lådor och externa enheter samtidigt som gruppen lyckats få en smidig lucköppning för batteri samt HMI.
9.2 Dränering
För att få en dränerad konstruktion har gruppen utformat luckorna för batteri och HMI likt tak som gör att vätskor rinner ut över sidorna. Bottenluckan är utformad med hål så vätskor rinner igenom.
9.3 Kabeldragning
Det har lämnats utrymme mellan de IP-klassade lådorna och kåpningen för att kunna dra kablar. Det finns även utrymme på sidorna under luckorna kör att
9.5 Skyddade komponenter
Kåpningen som gruppen utformat skyddar de IP klassade lådorna från damm och smuts och om det skulle falla föremål. Kamerorna är skyddade genom en egen kåpning som sitter mella kamerorna och tilten. Då tilten måste vara rörlig har denna kåpning inte satts emot resterande kåpning då det skulle resultera i en väldigt stor kåpning för att tillåta maximal rörelse för pan-tilten samt blockera sikt åt sidorna och upp.
10 Slutsatser och rekommendationer
Slutsatsen är att vi har lyckats uppfylla de krav vi ställdes i början av projektet men resultatet har fått lida pågrund av att mycket fokus lagts på att få fram en prototyp och tagit tid från att maximera kvaliten på våra lösningsförslag och bidragit till tidsbrist, men trots detta kan vi säga att vi lyckasts uppnå det vi satte ut att göra.
10.1 Cad och prototyp
Projektet resulterade i en 3D konstruktion och prototyp för kåpor till FUMO 3. Kåporna är uppbyggda på ett flexibelt sätt för att underlätta montering och underhåll. Genom att uppnå detta delades kåporna upp i 4 större delar.
10.2 Konstruktion
Grunden sitter fast i mittenplattan och håller upp de övriga top kåporna. Sidkåporna håller även upp den främre kåpan.
10.3 Laddning av FUMO3
Batteri luckan är till för att kunna öppnas lätt och ge tillgång till batteri IP-lådan i den främre delen av roboten.
10.4 Kamera och pantilt
HMI luckan är till för att hålla upp kameror och pantilt och sitter i den bakre delen av roboten. Denna lucka sitter även något högre upp än den främre batteri lådan och detta är för att ge kamerona bättre synfält och för att lasern inte skall vara ivägen. Denna höjd skillnad skapar även en brytning i formen vilket ger roboten en mer tilltalande profil.
10.5 Service
Underkåpan sitter fast i mittenplattan och håller upp bottenluckan som täcker av undersidan av roboten. Luckan för underkåpan är lätt att skruva av och ta bort vilket underlättar service och montering.
10.1 Rekommendationer
Vid vidare arbete med FUMO 4 projektet rekommenderar vi påföljande: Generella rekommendationer
Bättre anpassade IP lådor till kåpning för maximerad resurs av volym och bättre anpassad öppnings-lösning.
Minimera vikt genom ny drivbandskonstruktion
Minimera och/eller integrera komponenter och gränssnitt för att skapa ett smidigare system och minimera volym.
Att utföra fler olika tester på FUMO 3 skulle underlätta vidarearbetet med FUMO 4.
Rekommendationer för kåpning
Den nytillkomna radion bör integreras i FUMO 4 på så sätt att den inte bidrar till en ökning i längden som kan försvåra dess mobilitet. Detta innebär att antennerna troligtvis bör vinklas uppåt.
Fler fästpunkter kan integreras i basplattan för att underlätta montering av kåporna.
En smidigare lösning för luckorna skulle kunna göras än som det är i dagsläget (skruvas).
För framtida montering av robotarm bör en kåpningskonstruktion vara bättre anpassad till detta och hålla högre hållfasthetskrav. En större yta kan vara en god idé för att alla externa enheter skall få platts om en robotarm skall monteras.
11 Bilagor
11.1 Bilaga 1 - Gruppkontrakt
Gruppkontrakt
Bakgrund
Detta gruppkontrakt har utformats för examinationsarbetet i kursen KPP106, Produktutveckling, som skrivs på C-nivå. Examinationsarbetet avser 15 högskolepoäng och behandlar utvecklingen av kåpningen för FUMO 3, tredje generationen av en brandrobot vars primära uppgift är att spana i explosiva miljöer efter gastuber och liknande. Ett flertal
projektgrupper kommer att arbeta med olika aspekter av denna brandrobot.
Allmänt
En förutsättning för att vara med i denna projektgrupp är att detta kontrakt lästs igenom och
godkänts.
Grupproller
Projektledare – Miguel Morrissey Vice Projektledare – Fredrik Almers Dokumentations/Samordnare/Rapportansvarig – Miguel Morrissey CAD-ansvarig – Fredrik Almers
Beslut
Beslut kommer att tas gemensamt av Miguel och Fredrik genom
diskussion. Om projektgruppen är oense om något kommer projektledaren ha den avgörande rösten.
Tvister
Tvister i gruppen kan kommas att kan ta upp med examinatorn för kursen.
Sjukdom
Om någon är sjuk så bör denne meddela detta innan nästa projektmöte. Denne skall även ta ansvar för att följa upp arbetet och göra det som denne eventuellt blivit tilldelad under dennes frånvaro.
Raster
Raster hanteras efter projektgruppens behov.
Arbetstid/Arbete
Grupparbetet sker mestadels i gruppen, men även individuellt, framför allt gällande CADning och rapportskrivning. Gruppmöten kommer att
bestämmas allt eftersom.
Kontakt inom gruppen
Gruppen kommer att hålla kontakt via mobil och dropbox. Kontakten mellan resterande projektgrupper i FUMO 3 kommer även att ske via Skype.
Kontakt med handledare
Kontakten med handledare kommer utöver schemalagd tid ske via mejl- eller telefonkontakt kontakt.
Misskötsel
Exempel på misskötsel listas nedan för att underlätta identifiering av sådana företeelser.
Dessutom beskrivs vad som gäller vid misskötsel.
Inte ansvarar för sitt tilldelade område, oförmågan att kontakta övriga gruppmedlemmar om det tilldelade arbetsområdet varit för stort och därmed inte kunna lösa uppgiften.
Anser projektledaren att en viss person har varit ej delaktig i projektet kan
denna besluta om en omröstning så att majoriteten avgör den tilltalades
repressalier.
Anser Projektledaren att en viss person inte följt sin deadline kan denna
besluta om en omröstning så att majoriteten avgör den tilltalades repressalier.
Upprepande förseningar till gruppmötena, utan giltiga skäl, kan leda till att projektledaren fattar beslut omröstning så att majoriteten avgör den tilltalades repressalier.
11.2 Bilaga 2 - Gantt schema
5
11.5 Bilaga 5 - Pugh's matris
11.6 Bilaga 6 - Funktionsanalys
Kåpning för chassi och komponenter
Robusthet Tillåta mobilitet
Stöttålig Klara olika miljöer Förhindra störning av flipprar Förhindra störning av synfällt för kamera
Tillåta transport upp- och nedför trappor
Bärande Dränerad
Yta ovanpå för externa komponenter
Genomtänkt
konstruktion Hål i bottenplattan förhindra uppsamling av vätskor
11.7 Bilaga 7 - FMEA
11.10 Bilaga 10 - Konceptförslag renderingar
11.11 Bilaga 11 - Slutgiltigt konceptförslag renderingar