Academy of Innovation, Design and Engineering
Tutors: Filip Flankegård (Mälardalen University)
Rose-Marie Hellqvist (Volvo Construction Equipment) Examiner: Sten Grahn (Mälardalen University)
Developing primary controls for
multiple CE-machines in a
teleoperation’s environment
Product and process development
Master thesis work
30 credits, Advanced level
Ingo Andersson and Joel Garbers
Abstract
Background: An intermediate step towards fully autonomous construction equipment is
“assisted tele-remote operation”. These sorts of operations imply that an operator remotely supports machines that has encountered a situation that autonomous systems onboard the construction machines (CM) cannot solve. Considering teleoperators are not required to continuously monitor the CM in an assisted tele-remote environment, multiple construction machines can be teleoperated simultaneously. For simplification, “assisted tele-remote operation” will now be referred to as “teleoperations”.
Volvo Construction Equipment is currently exploring the possibility to teleoperate wheel loaders, articulated haulers, and excavators from a single platform. To do this, primary controls adapted for operating these machines are needed. The primary controls should be designed with the needs of a teleoperator in mind while taking functionality into account, which is needed when CM are both operated conventionally and in tele-remote applications. This procedure will be referred to as relevant primary controls. As the primary controls from three different CM-types are destined to be combined into one platform, the teleoperations platform will be referred to as “3-1 CM teleoperations platform”. The purpose of this thesis project was to propose a relevant solution to primary controls for a 3-1 CM teleoperations platform. To fulfil this purpose, the following two research questions (RQ) where formulated: • RQ1: What are the challenges for teleoperating construction equipment?
• RQ2: What defines primary controls in a 3-1 CM teleoperations platform and how can
the layout be improved?
Method: Using interviews, observations, and literature as qualitative data collection methods,
several insights where gained. A scenario for the CM was defined to define the situation in which the quantitative data collection method would be performed. Needs of current CM operators combined with teleoperators have been analysed and listed. Quantitative data has been collected and analysed to design the layout of the primary controls using the objective data as a basis.
Result: The research questions were answered with the following results:
• RQ1: Insights that resulted in several themes describing how teleoperations can be developed by looking at different challenges it can face.
• RQ2: Specifications of the functions included in the new ‘primary controls’ based on CM functions from the company and from teleoperating experiences from several industries. An analysis on how often the functions for the new ‘primary controls’ were used, was carried out.
The answers to the research questions were used as a basis to fulfil the purpose of this thesis project by proposing a conceptual solution for primary controls to a teleoperation’s platform for operating multiple CM.
Conclusions: It was established that a 3-1 CM teleoperations platform can be developed
towards certain CE-machine types. Moreover, additional analysis with experienced operators of each machine type are needed to improve and verify the most optimal layout of the primary controls and platform. Further research is still required to validate the answers to RQ1 and RQ2.
Keywords: Assisted tele-remote operation, teleoperation, automation, Construction
Acknowledgements
The authors of this study would like to acknowledge and thank all the people who have helped us by supporting and contributing to the development of this thesis.
Firstly, we would like to thank the tutor from Volvo CE, Rose-Marie Hellqvist for all the support and guidance she has given to us in this master thesis. Her resourcefulness and ability to help us out before we even knew where to look gave us the boost needed to tackle this challenge. We would also like extend our gratitude to everyone at the Company, especially Dalibor Konjicija and Alexandra Teterin for making this Master thesis project even possible, but for also taking the time and energy to make us feel welcomed, a part of the team and for helping us out when we needed it. It has been very rewarding and interesting to meet and work with so many talented people.
We would also like to thank our tutor Filip Flankegård from Mälardalen University who has helped us tremendously with the thesis work. We are grateful for all the advice and the time that Filip have spent reading, giving honest and valuable feedback for this thesis.
Finally, we would like to thank our families and friends who have given us tremendous support throughout these years. It has been incredibly exciting and educational to work with this Master thesis project and we are very grateful for this opportunity.
Abbreviations
ATC Automatic Traction Control
CE Construction Equipment
CM Construction machine
FoU Frequency of Use
RQ Research question
Glossary
Teleoperator An operator who controls Construction machines tele-remotely. Primary controls Controls used continuously for performing each construction
machines specified tasks.
Attributes Hydraulic attachments mounted on the construction machines which completes the task and fulfils the purpose of the Construction equipment.
Table of contents
1 Introduction ... 1
1.1 Background ... 1
1.2 Problem formulation ... 3
1.3 Purpose, aim and research questions ... 3
1.4 Directives and project limitations ... 4
2 Research Method ... 6
2.1 Research design ... 6
2.2 Research philosophy and approach ...8
2.3 Qualitative data collection ... 9
2.4 Qualitative data analysis ...11
2.5 Systematic literature review ... 12
2.6 Quantitative data collection: Step-by-step-procedure ... 15
2.7 Quantitative data analysis ... 17
2.8 Idea generation ... 18 2.9 Research quality ... 20 3 Theory ... 22 3.1 Telepresence ... 22 3.2 Visual feedback ... 22 3.3 Fleet control ... 23 3.4 View sharing ... 23 4 Project process ... 24
4.1 Qualitative data – process and outcomes ... 24
4.2 Quantitative data – findings ... 25
4.3 Idea generation ... 25
5 Results ... 33
5.1 RQ1 ... 33
5.2 RQ2 ... 34
5.3 Conceptual solution from thesis aim ... 37
6 Analysis ... 40
6.1 RQ1 ... 40
6.2 RQ2 ... 40
6.3 Conceptual solution ... 40
6.4 General ... 41
7 Conclusions and recommendations ... 42
8 References ... 43
List of figures and tables
Figure 1. Virtual training simulators for Wheel loaders. ... 2
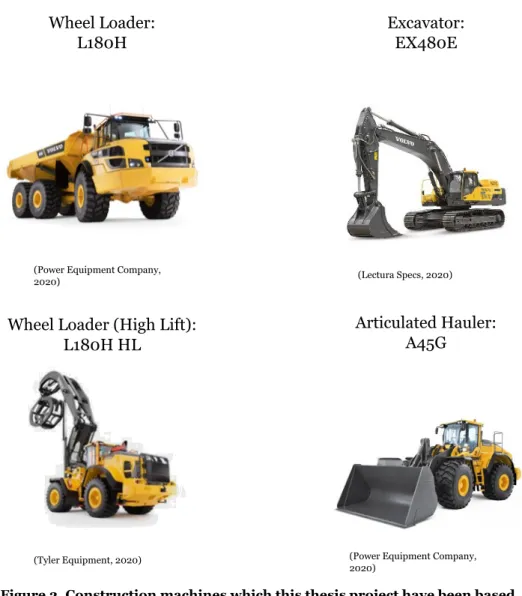
Figure 2. Construction machines which this thesis project have been based on. ... 5
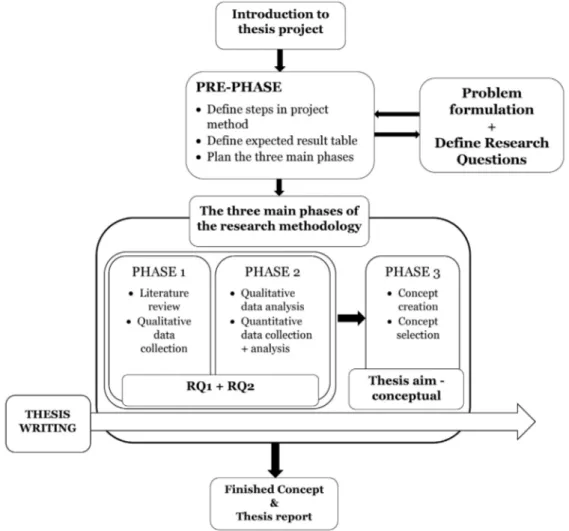
Figure 3. Research design of thesis project. ... 6
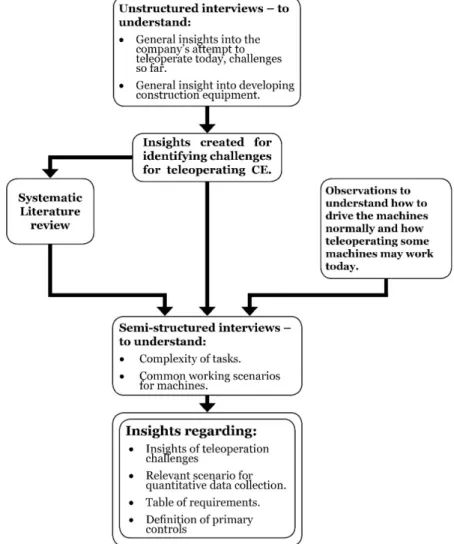
Figure 4. Process of qualitative data and literature review. ... 7
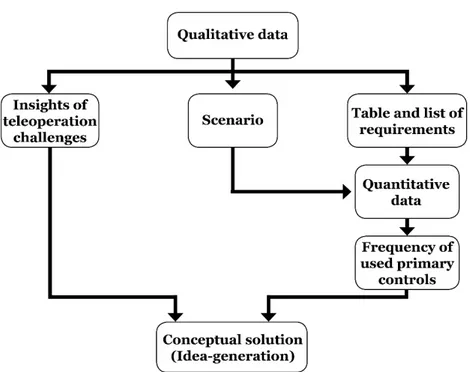
Figure 5. Outcomes from the research data. ...8
Figure 6. Visual representation of article screening. ... 14
Figure 7. The chosen scenario for this thesis project with excavator, hauler, and crusher. ... 16
Figure 8. The chosen scenario for this thesis project with wheel loader and trucks. ... 16
Figure 9. Input methods based on the human anatomy... 19
Figure 10. The first generated concept. ... 26
Figure 11. The second generated concept. ... 27
Figure 12. The third generated concept. ... 28
Figure 13. The fourth generated concept. ... 29
Figure 14. Visualised concept of primary controls for a 3-1 teleoperations platform. ... 31
Figure 15. Visualisation of proposed concept with storyboard of using tablet. ... 32
Figure 16. Conceptualised solution to fulfil project aim. ... 37
Figure 17. Joysticks with tablet in “docked mode”... 38
Figure 18. Primary controls mode UI when operating a wheel loader... 38
Figure 19. Foot pedals including buttons. ... 39
Figure 20. The three currently available simulators from Volvo CE. ... 16
Figure 21. The virtual test simulator Volvo ART 500 (articulated Hauler). ... 16
Table 1. Selected and discarded ideas. ... 30
Table 2. Insights of current challenges for teleoperation. ... 33
Table 3. The table of requirements. ... 34
Table 4. The second table for the requirements. ... 35
Table 5. Primary controls functions and intended interaction identified with the literature. . 35
1
1 Introduction
In chapter one the background to the proposed master thesis is presented. The purpose of the background is to give the reader basic understanding of the topic. An introduction to automation and teleoperations helps with understanding why the topic is important, which leads to the problem formulation of this project. The problem formulation helps with defining the research aim, research question and ultimately the project limitations for the report and the thesis work.
1.1
Background
In recent years, the development of autonomous vehicles has stretched well beyond the borders of private cars for everyday use. What can be witnessed is a development of automating in more industries besides the automotive industry. Because of this increasing development of automation, important questions and discussions are raised; vehicles that are not purposed for transporting people but are designed for labouring tasks no longer have a need for constantly transporting an operator. Furthermore, the development of automation raises the question on how and which certain parts of professions in different industries are most relevant to automate but also how to focus on the parts of the profession or tasks that are not automated. This is the case with Construction Equipment (CE) where there is evident interest to automate and separate the operator from the machine (Dadhich, et al., 2016, p. 220). By removing the operator from the machines, the work process can be sped up by not worrying about factors revolving the safety of the driver (Su, et al., 2015) and thus certain part of the profession becomes automated. However, the profession of being an operator will most likely remain relevant for a long time for the parts in the profession that can’t be automated or where automating at a reasonable cost is not possible.
While automation for Construction Machines (CM) has been an active area of research since the 1980’s (Hemami & Hassani, 2009) only a handful of construction and mining companies utilise teleoperation and semi-autonomous machines (Dadhich, et al., 2016, p. 214). One reason for this stems from the current situation of fully autonomous systems not being able to perform equally as well as manual operations. Dadhich et al. (2016) explain that a fully automated system for a construction equipment has never been demonstrated. Furthermore, because of the challenges of moving towards fully automation in the construction equipment industry, focus has been on the development and use of tele-remote operation of construction equipment, also called unmanned construction (Sato, et al., 2020).
However, a five-step control model discussed in Dadhich et al. (2016), Frank et al. (2012) and Roberts at al. (2002) showed, through different operational modes, how there are intermediate steps to take until full autonomy can be reached. Dadhich et al. (2016) emphasises that the model is still relevant today and that we are currently on the third step of tele-remote operation. After this, the fourth step of Assisted tele-remote operation would follow and finally the fifth step of fully autonomous mode, i.e. where the machine performs all tasks by itself and the operator is only required for giving out high-level commands, can be reached. Tele-remote operation is a strong step towards fully automating heavy machines (Dadhich, et al., 2018, p. 178). However, tele-remote operation of construction equipment is not something new. In Japan it has been used after multiple natural disasters (Sato, et al., 2017; 2020) since the end of the 90s, starting with the remotely controlled robot “Robo Q” in 2000 (Chayama, et al., 2014, p. 404). Furthermore, the mining and CM industry are currently utilising remote controlling in a much broader scale (Autonomous Solutions, Inc., 2020; Doosan, 2019). The use of tele-remote operation is just an intermediate step towards performing fully autonomous operations. According to the five-step control model, the next big step will most likely be assisted tele-remote operation, i.e. when the machine via the use of operator
2
assistance functions, i.e. the operator intervenes where human supervision is necessary, performs the majority of the tasks since the need for a constant connection and monitoring of machine from humans will decrease. Because the transitional step towards full automation will most likely be Assisted tele-remote operation, it is of interest to look at the opportunities and challenges with moving from tele-remote operation to assisted tele-remote operation. The opportunity lies in adding functionality, and the ability to alter it. Some information which is transferred to the operator when the CE-machines are operated conventionally will go missing once controls are moved to a so-called teleoperation’s platform. The challenge is therefore to identify which functionality is needed and how the operator will interface with it (Tripicchio, et al., 2017, p. 219).Currently, the company Volvo Construction Equipment, hereafter referred to as the company, are investigating ways of increasing efficiency and safety of their CMs. While not reaching full automation for every machine, they have successfully managed to tele-remotely operate wheel loaders, articulated haulers, and excavators but not a combination of all three machines. As human assistance is predicted to be needed only in specific situations, it can be presumed that an operator would have to assist several types of machines simultaneously.
For teleoperations applications, the company have utilised already-existing training simulators used for training future operators, see Figure 1. Two types of virtual training simulators have been developed; one designed with excavators in mind and the other one adapted for both wheel loaders and articulated haulers. Naturally, these have been designed with the specific company’s CM in mind and their respective switches, joysticks, pedals and more. For this master thesis and to avoid confusion, the shape and construction of virtual training simulators is what is referenced to when talking about teleoperation platforms i.e. training simulators equals platforms.
Figure 1. Virtual training simulators for Wheel loaders.
3
The controls designed to operate each type of CE-machine in the most efficient way, is crucial to the operator and the most important ones can be labelled primary controls. Primary controls are defined in this thesis project as the buttons, switches, levers, joystick, and other physical input methods that are continuously used to allow the operator to move the CE-machine and to carry out its specific tasks. As of today, the products of the company offer no convenient way of switching between machines whilst staying in the same operator seat with the same controls. Arguably, to have multiple teleoperation stations specialized for every machine would only increase expenses in additional hardware and space required. It would also mean that the operator must switch between different control stations, minimising the effective time of the teleoperator.1.2 Problem formulation
To improve the workflow of teleoperations CM using one teleoperator, the company is evaluating the possibility of combining the primary controls from wheel loaders, excavator, and articulated hauler into one platform.
To do so, the company needed an exploratory study to find out what a combination of the primary controls could look like. The complexity herein lays in the combination of primary controls in the different machine types. Where the wheel loader and articulated haulers are equipped with a steering wheel and brake pedals to change direction of the vehicle, the excavator changes direction by joysticks in combination with rocker-pedals (Volvo CE, 2019a; 2019b; 2019c). The challenge is further complicated since the company wants to include two different types of the wheel loader. In these two different machine types, the attributes are controlled using widely different, specialised primary controls (Volvo CE, 2019c; 2019d). Furthermore, neither the company nor literature has specified the exact needs of a teleoperator of CE-machines (in terms of functionality and situations where teleoperations are necessary). Because of this, the thesis project sets out to explore the combination of primary controls in what will hereafter be referred to a ‘3-1 CM teleoperations platform’.
1.3 Purpose, aim and research questions
Purpose
- The purpose of this thesis project is to propose a relevant solution to primary controls
for a 3-1 CM assisted teleoperations platform.
Aim
With the complexities explained in the Problem formulation in mind, it was deemed essential to understand the needs and use-cases for the 3-1 CM teleoperations platform before any design-process could begin. The aim of the project was therefore formulated as follows:
- To identify real life uses of the 3-1 CM teleoperations platform so that the primary
controls can be enhanced in their layout and functionality towards that use. A conceptualised solution should be designed to present its intended use, both on a systematic and a detailed level.
To prove that the project aim has been fulfilled, some criteria’s must be satisfied:
1. Summarised insights on the challenges of teleoperating CM. By mapping out the obstacles that teleoperation faces it creates better understanding of which specific challenges that affects the primary controls and how they can be designed. This removes the need to build several physical prototypes, testing them, and choosing the most efficiently used one that is estimated to be less resource efficient.
2. Functions from both the CM and teleoperation platforms must be identified and analysed. It is essential to identify functions that should be included in the primary
4
controls and how they should be improved towards its probable use to make sure that the correct functions are implemented.3. A proposed solution must be generated. This solution must be presented in such a way that both the company and future teleoperators can understand and analyse the result. It is essential for further development, as this project does not intend to deliver a market ready solution, but rather a conceptualised proposal to primary controls in a 3-1 teleoperations platform.
It is expected that both the first and second criteria can be satisfied in this thesis project. The resources available set limiting factors of how well these criteria’s can be in terms of time and ability to involve relevant stakeholders into the research process.
The third, and last, criteria can be satisfied in different ways. Acceptable results include physical models along with user manuals explaining how the proposed solution is supposed to work in practice. Another acceptable result is well-defined virtual models and user manuals. Measuring these criteria’s or the project purpose in a quantitative way proved to be difficult, as no reference product is available today. This thesis project is only a part of a larger project at the company that is still in an exploratory phase. An analysis will therefore be performed whilst answering each research question, putting the result in relation to the criteria’s described above.
Research questions
To fulfil the aim of the study the following research question were formulated. - RQ1: What are the challenges for teleoperating construction equipment?
- RQ2: What defines primary controls in a 3-1 CM teleoperations platform and how can
the layout be improved?
1.4 Directives and project limitations
For this master thesis, the following directives where provided by Mälardalen university. - Independently plan and perform a methodical and scientific product development
project.
- Time frame of 20 weeks.
Furthermore, the assessment criterions were studied, and the report was examined by the authors of the thesis report before hand in.
The following limitations where set up for this thesis project. The conceptual solution will:
- Not be built into physical prototypes.
- Be presented in the form of an illustrated prototype1 in this thesis report.
- Not be verified in practice.
- Deliver a basis of knowledge which the company can use for further development of a 3-1 CM teleoperations platform.
- Only consist of primary controls for the three CM developed by the company. - Development and production costs of conceptual solution will not be done. - No software to support the conceptual solution will be created.
5
The conceptual solution is designed to work with the following machines from Volvo CE:- Analysis of how much a teleoperations platform will be used in practice
- Analysis of how much a teleoperations platform needs to be used for it to minimise resource consumption in comparison with current applications.
- The COVID-19 pandemic unravelled during this thesis project and set limitations of the ability to interact with the stakeholders.
(Power Equipment Company, 2020)
Wheel Loader: L180H
(Tyler Equipment, 2020)
Wheel Loader (High Lift): L180H HL
(Lectura Specs, 2020) Excavator:
EX480E
(Power Equipment Company, 2020)
Articulated Hauler: A45G
Figure 2. Construction machines which this thesis project have been based on.
6
2 Research Method
This chapter aims to explain how the research- and development project was approached and executed. Each method or approach is explained and motivated for its inclusion to the thesis. Alternative methods or approaches to those used may be mentioned but not described.
2.1 Research design
To answer the Research questions (RQs) of the thesis, a research design compatible with the practical nature of the project had to be developed. The scientific and academic requirements of the thesis helped with setting up the necessary steps.
The means of the literature review and multiple semi-structured interviews, unstructured interviews, observations, and their respective results was used to help with answering RQ1 and RQ2. To fully answer the RQs it was also deemed appropriate to include quantitative methods and analyse both the quantitative and qualitative data. Furthermore, to better incorporate a product development approach to the project and to fulfil the research aim, different sources of inspiration was used. This included methods proposed in the book “Research methodology – For engineers and other problem-solvers” by Säfsten and Gustavsson (2019) and “Research methods for business students” by Saunders, et al., (2016). Inspiration was also taken from the mindset of Human-centred design and methods proposed by IDEO (2015). Their field-guide with all the methods necessary for product development was utilised for conceptualising what would be the results of the controls. To better distinguish the structure of the research, all the relevant phases and stages and how the different RQ would be answered, a visual representation of the research design was developed, here illustrated in Figure 3.
7
An introduction for the thesis project followed by a pre-phase was aimed to outline what the expected outcome as a result would be for the project and the necessary steps to reach that result. The aim with the pre-phase was to also identify the problem formulation and defining relevant research questions. After mapping out the requirements for the project in the pre-phase three pre-phases were formulated and defined as the main pre-phases of the research methodology and for the rest of the thesis.As illustrated Figure 3, the aim of each phase is to answer the research questions by different means. The phases are in sequential order because of the way that RQ1 and RQ2 creates a basis for Phase 3 and developing the conceptual solution. This means that carrying out Phase 3 is only possible after having finished the first and second phase, which would result in a list of requirements and Frequency of used primary control. It was concluded that the process of report writing for the master thesis would happen in each phase, with room for additional alterations.
2.1.1 Outcomes from Phase 1 and Phase 2
To summarise the process of the qualitative- and quantitative data and literature review that are carried out during Phase 1 and Phase 2, Figure 4 and Figure 5 were created. Figure 4 aim to give the reader an idea of the order in which the qualitative data collection processes was carried out, its intended purposes and all the outcomes from the qualitative- and quantitative data in the bottom most square.
8
Figure 5. Outcomes from the research data.The intended purpose and outcome of the qualitative data was two-fold. It was mainly used for answering the RQs, which was meant to result in Insights of teleoperation challenges, table of requirements and list of requirements, but also for mapping out scenarios that would later work as a basis for the quantitative data. The quantitative data in turn, with both the scenarios and the table of requirements as basis, would result in a Frequency of used primary control. The Frequency of used primary control would work as a result for answering RQ2.
Finally, all the outcomes would work in unison to reach the thesis aim present a conceptual solution. Figure 5 illustrates the connection between the qualitative- and quantitative data and the different outcomes.
As the outcomes “Insights of teleoperation challenges”, “Table of requirements”, “List of requirements” and “Frequency of used primary control” in Figure 5 are the answers for the research questions, they are presented in more detail in the following result-section of the report:
- 5.1.1 Insights of teleoperation challenges - 5.2.1 Table of requirements
- 5.2.2 List of requirements, and
- 5.2.3 Frequency of used primary control.
2.2 Research philosophy and approach
2.2.1 Pragmatism
Within pragmatism, the research starts with a defined problem. From there, the aim is to contribute with practical solutions that pave the way for future practice. Because of this practical approach the research may vary considerable in terms of objectivity and subjectivity. Therefore, when using pragmatism, the most important determinant for the research design would be the research problem and the research questions (Saunders, et al., 2016, p. 142). Furthermore, being pragmatical within a research philosophy means that knowledge and theory is verified by trying it in practice. Theory is used as a means for solving problems, in other words, theory guides the researcher for practical action (Säfsten & Gustavsson, 2019).
9
The pragmatic research philosophy closely resembled the teaching methods that has been utilised by the authors at the various courses in their program. To be allowed to reconcile both objective and subjective facts, values and knowledge with contextualised experiences was deemed to be an efficient way of undergoing an exploratory study like this one. For this reason, the philosophy helped with selecting appropriate questions and methods as this thesis project aimed to deliver a practical solution rather than purely theoretical answer.2.2.2 Abductive approach
This project aimed to take an iterative approach to all phases of the study, meaning taking an approach that would allow going back and rethink, adapt and revise earlier decisions is very valuable. Furthermore, the thesis work would utilise available literature combined with gathering of practical data and analyse it. Even though there is a lot of available research in the topic of CE, the specific context this thesis covers have far less information. This means that neither a deductive nor an inductive approach would suffice since a deductive approach would mean to create framework and hypothesis from a wealth of literature and an inductive would mean to generate data and analysing to create new theoretical themes (Saunders, et al., 2016, p. 145) . For all the above-mentioned reasons the project took on an abductive approach, i.e. moving back and forth in-between the data and theory. The abductive approach begins with the researcher noticing a fact which is then complimented by constructing a theory of how this occurred.
2.3 Qualitative data collection
2.3.1 Sample selection
According to Saunders, et al. (2016), a relevant sample size is dependent on the objectives of the research being done. It should be put into relation of the resources available to you and from that, define a sample size which has credibility and will be usable. In the end, the validity, understanding, and insights gathered from the samples will rely more on the researcher’s ability to collect and analyse the data.
In this thesis project, the sample selection is referred to two parts of the data collection process. Partly, the people interviewed during the semi- and unstructured interviews. The selected type of person for each interview method is referred to as “targeted” persons in the following sections below. The targeted persons where mainly people with knowledge and experience of teleoperations and operating the CE-machines within the company. A detailed list of the interviewed persons is presented in Appendix 1: Interview and Observations-log.
The other part of the sample selection revolves around scenarios in which the machines types where analysed in the quantitative data collection. The scenarios where created so the machines could be tested consequently within a specific situation to strengthen the test results. The aim was to identify typical tasks or situations the three machines may encounter. The situations should represent situations that most likely would be needed to teleoperated as autonomous system would not be able to solve without human assistance. The chosen scenario is presented in section 2.6, Quantitative data collection: Step-by-step-procedure and the process around it is presented in 4.1.3 Scenario selection.
2.3.2 Unstructured interviews
Saunders, et al. (2016) describes unstructured interviews as an informal method of talking to someone to explore an area of interest. The interviewer does not come with a predefined set of questions to the interview but is responsible for having a clear idea of what the purpose of the interview is. It is therefore essential that the interviewer has a clear idea of which topics should be discussed and explored during the interview.
10
In this master thesis, unstructured interviews were used to get a greater insight into the research topic. The purpose was to find out what had been done before, what the key challenges and opportunities of teleoperations within construction equipment were. It was an efficient way of exploring what this master thesis should focus on.These sessions were performed by two persons, where one person committed to keeping the conversation alive and “guiding” the interview towards the area of interest in relation to this master thesis. The other person took notes of what was said during this time. For the unstructured interviews, people with insight into controlling vehicles and teleoperations where targeted. A total of six people was interviewed, all within the company.
A literature study was also considered for this part of the process but because the purpose was to get an insight into the company, research papers were deemed too general.
2.3.3 Semi-structured interviews
A semi-structured interviewer will use a set of questions as a basis of discussion, enabling the interviewee to answer the question freely. The order of the questions may vary depending of the flow of the conversation and the answers will be noted through note taking. This is to ensure that what the interviewee answered is kept and not altered when analysing the data later on (Saunders, et al., 2016).
After a general analysing the data collected from the un-structured interviews, a foundation and a “feeling” for how machines operate today and in the future was needed. This need lead to semi-structured interviews. As in the un-structured interviews, the semi-structured interviews which were performed by two persons where one committed to asking questions whilst the other person took notes of what was said by the interviewee and in what context. The aim with the semi-structured interviews were to identify when the three different machines are used, under which circumstances and how future technological developments could affect these tasks. The semi-structured interviews were therefore used to discover common tasks of the three different machines, the difficulty of these tasks and how automation will play a role in changing the tasks of the operator.
When planning the semi-structured interviews, people with an expertise within development of autonomous solutions- and teleoperations solutions and great experience of driving the machines where targeted. A total of four individuals was interviewed.
The questions during the (un- and semi-structured) interviews asked depended on the person interviewed. As they had different backgrounds and expertise’s within the company and its products it was of little relevance to ask everyone the same questions. Because of this, the interview questions where adapted towards the expertise of the interviewee. Questions can be seen in Appendix 2: Interview questions.
For this part, questionnaires were also considered but discarded because the nature of semi-structured interviews allows for more elaborate discussions since it is possible to ask follow-up questions.
2.3.4 Observations
During this research, several observations where made along the way in order to capture knowledge which was considered to potentially be useful to answer the research questions. Observations included operating the machines in practice and talking to current teleoperators of mining machines. If any observations were made during these occasions, they were noted immediately. Observations included citations of problems, ideas for solutions to problems with current products and insights which occurred whilst operating the current products. No guidelines where followed for observations but is mentioned here to further elaborate on how
11
data was collected during this thesis project. The occasions used for observations where noted and presented in Appendix 1: Interview and Observations-log.2.4 Qualitative data analysis
When the qualitative data was collected, a need for methodically thoroughly analysing it emerged. To find appropriate methods, several literatures was researched and methods where combined in order to create a clear path for the analysis. Both Säfsten & Gustavsson (2019) and Saunders, et al. (2016) suggested a 4-stage method which was utilised.
1. Present the data in a format which allows for analysis. 2. Arrange data.
3. Find themes. 4. Define insights.
For this master thesis, methods proposed by Säfsten & Gustavsson (2019) which corresponded with methods in IDEO’s ‘The Field Guide to Human-Centred Design’ (2015) and methods from the latter literature used. These choices were motivated by the fact that methods proposed in ‘The Field Guide to Human-cantered Design’ was described in more detail. This was deemed to be beneficial as the process would be clearer and the result would therefore be improved. The process of the four stages presented above was first performed after the unstructured interviews. These insights formed a guidance for how the semi-structured interviews and observations were performed. This iterative process was clarified in Figure 4.
The first two steps in the 4-stage method were done the same day as the interview or, at latest, the day after. The notes from the observations and interviews were rephrased into shorter sentences and put into one document. No generalised method was identified for these steps and will therefore not be described in further detail. As generalised models for how step three and four could be performed was found, a description of these stages follows below.
2.4.1 Find themes
IDEO (2015, p. 80) describes “Find Themes” as a way to categorise the learnings that may have been acquired during the data collection. By finding patterns and bundling them together, the data collected should be easier to understand as it can be minimised and collected into a smaller, more tangible package.
In this master thesis, interview and observation-notes where put into one place and compared. “Multiples”, i.e. overlapping information were summarised and put into one sentence. After that, themes were created based upon the sentences and each sentence were categorically put into one theme.
2.4.2 Insight statements
“Creating insight statements” aims to further synthesise the data which has been collected. By creating concise sentences which points the researcher in the correct direction for subsequent project steps, such as brainstorming (IDEO, 2015, p. 81).
The sentences within the themes created in the previous steps were analysed and put into shorter, more concise sentences in accordance to the template given by IDEO, see Appendix 3: Create insight statements template. The insights from the interviews and observations are presented in Appendix 4: Insight statements.
12
2.5 Systematic literature review
To be able to answer the research questions for this master thesis a literature review had to be adapted. Since the company has no “market ready” solution for teleoperating CM today, not all future functionality of teleoperations had been specified by the company. The purpose of the literature review was therefore to investigate probable additional functions which only are relevant when teleoperating construction equipment.
2.5.1 Background
The purpose of this literature review was to gain knowledge of research findings firstly from last 10 years and then narrow the scope down to only include research from the last five years i.e. 2015-2020. The aim of including research from the last five years is to utilise the latest research findings related to teleoperations and CM that could be used as a basis for defining primary controls. To gain as much knowledge as possible, the literature review used a systematic approach.
The systematic review is a process that uses a comprehensive pre-planned strategy of finding existing research (and the literature behind them), evaluating the contribution, analyse and synthesise the findings to allow conclusions to be made about what is known and therefore answer the RQs but also, what is not known and point out what still needs to be researched through the RQs. Because of the low amount of data and research that has been carried out tackling the problems of a teleoperating platform controlling multiple machines, the project is dependent on finding state-of-the-art literature and research. For this thesis work it was more suitable and of advantage to use Elsevier’s databases like Scopus and ScienceDirect because of their large amount of access to peer-reviewed articles that weren’t necessarily bound to a specific subject field and up to date. It was also of advantage to use Springer for having a section dedicated to ‘engineering’ and its subcategories ‘mechanics’, ‘robotics & control’ and ‘Production & Process Engineering’ which where helpful while finding literature related the topic of this thesis project. These databases were utilised as primary databases, while secondary sources included DiVA, IEEE Xplore and online websites.
2.5.2 Systematic Literature process
The systematic review followed a five-step-process suggested by (Denyer & Tranfield, 2009). The systematic process was used for its benefits with being transparent, inclusive, explanatory and for enabling learning.
The following steps of the systematic review process are presented below. 1. Formulating the review question(s).
2. Locate and generate a comprehensive list of potentially relevant research studies. 3. Select and evaluate relevant research studies using PRISMA checklist of criteria to
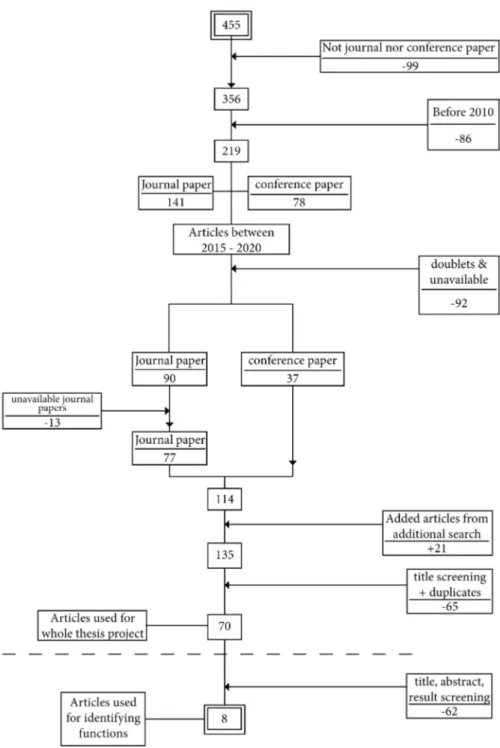
assess relevance of each article in relation to the review question(s). The PRISMA checklist is the literature selection checklist and can be presented through a flow diagram. Selection and sifting are undertaken by:
a. reference type. b. which year. c. Duplicates. d. non-available. e. title and abstract.
f. full text analysis (Kim & Noh, 2010). 4. Analyse and synthesise relevant studies by.
a. Breaking down each study into its constituent parts and record key points on a data extraction form.
13
a. An introductory section that states the problem and review question.b. A methodology chapter that describes precise details of how the review was conducted.
c. Findings and a discussion chapter that review all the studies to precise what is known and what is not known.
From RQ2, several given keywords were formulated. Out of these keywords a handful of search strings were defined to better understand what type of literature was sought out. However, the other use of the keywords would come in-hand during the third step, to help with the inclusion and exclusion criteria. The defined keywords in the search string included nine search terms:
- remote controlling. - user experience. - teleoperation.
- construction equipment. - human factors.
- heavy equipment operator. - cognitive factors.
- construction equipment operator. - heavy machines.
The article screening concluded in 70 articles being used for the whole thesis project, meaning that not every article would be analysed for frame of reference, but instead also used in the introduction chapter, findings chapter etc.
There were an additional 21 articles added to the article screening. These articles came from a test search in the pre-phase. The test search was for mapping out an approximate size of the subject matter. The majority of these articles were however excluded for being duplicates from the main article search. A graphical presentation of the PRISMA checklist of criteria is illustrated as a flow diagram in Figure 6. The literature review itself was done by the authors before the interviews and observations had been carried out to better anchor the thesis project with a theoretical basis.
After deciding which articles to use for the literature review, it was concluded that the articles would be used depending on the need of use and for which phase, depending on where they could be of relevance for the project, thus saving time. This method steers away from the usual structure of analysing each article first and then conclude it in a frame of reference chapter.
14
Figure 6. Visual representation of article screening.This method was applied for the first phase which was done in parallel with setting and performing the interviews. The 70 articles were firstly divided into group, each group for each research student and then screened after their title, abstract and results. During the screening process the following inclusion criteria were used:
- Good and bad experiences from other teleoperations research projects which could be translated into functions of future teleoperations platforms.
- Proposed solutions for experienced issues with teleoperations within construction equipment.
15
The result was a total of eight articles that could be specifically applied to identify functions for teleoperations platform. Once the articles had been selected, each report was screened by full text. During the screening process of each article, the relevant information in each article was highlighted and noted as “focus areas” in a table summarising the eight articles.If articles had overlapping information, they were categorised together to make the following step easier. Once categorised, the information was analysed, the knowledge was written into section 3 Theory of this report. During this process, the analysed articles where open and used as a basis of information. The table is presented in Appendix 6: Articles of interest.
Once information in section 3 Theory was produced, the section was screened. The information where transcribed into functions of a future teleoperation’s platform. These functions (that was a creation of the authors) are presented in section 5.2.2 List of requirements. The functions are further elaborated by the end of Appendix 7: List of requirements for primary controls.
2.6
Quantitative data collection: Step-by-step-procedure
The step-by-step procedure aims to look at how many times specific controls would be used in a scenario and consequently determine if, by comparing to the list of requirements, the controls could be classified as “primary controls” or not. The procedure implements the help of advanced training simulators available as resources from the company. Their product catalog includes training simulators for wheel loaders, articulated haulers and excavators. These platforms (training simulators) are built on similar basis with removable chassis covers, same operator’s chair, motion system etc. (see page 3 of Appendix 8: spread sheet from step-by-step procedure for more detailed view of the platforms). The simulators are developed for operator training by the company and aims to deliver as realistic experience of the construction equipment machines as possible (Volvo CE, 2020). The simulator offers a wide range of scenarios where all three machine models (except for the “high lift”) could be tested.
The reason for performing the step-by-step procedure with training simulators instead of simulating defined scenario in a real-life experiment using the company’s available resources is explained in 2.9 “Research quality“.
The step-by-step procedure consisted of analysing each machine (wheel loader, articulated hauler, and excavator) in virtual situations where each machine had the same task as in the defined scenario presented below. Each machine was tested three times and the tasks performed in the scenario were usually structured the same, with minor differences in wording. The scenarios where an outcome from the qualitative data but is presented here to improve understanding of how it was used in context of this thesis project. The selection-process is elaborated in section 4.1.3, Scenario selection.
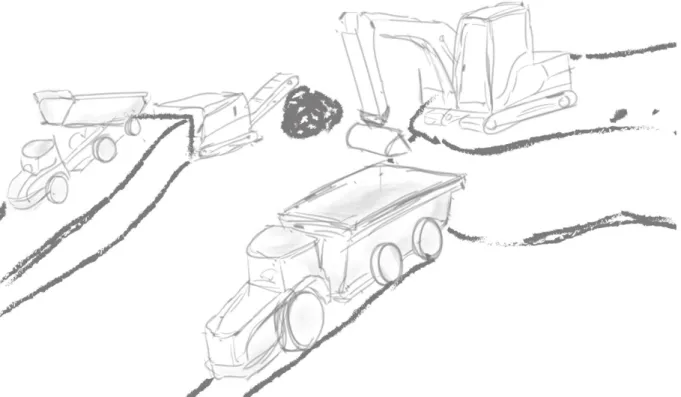
The chosen scenario included all three machine models, but not the high lift-type of the wheel loader as it could not be able to be simulated in the virtual environment. In this scenario, the articulated hauler and the excavator collaborates to move fragmented rock into a stone crusher, see Figure 7. The hauler is loaded with fragmented rock by the excavator which it then transports to, and tips it into the stone crusher as seen by the far left. The wheel loader moves the processed stone to storage areas and loads processed material into trucks as pictured in Figure 8. The scenario is pictured in the following figures:
16
Figure 7. The chosen scenario for this thesis project with excavator, hauler, and crusher.17
During the process, each input to the simulator done by the operator was noted by another person. To do so, three different spread sheets for each machine was created with Excel. Each spread sheet consisted of multiple headlines.Task Input Primary controller? Communication required? Idea Warning - Task – consisting of all the tasks performed in the given scenario with a short
description of its main purpose.
- Input – Describe what controls that were used and how.
- Primary controller –Write either a yes or no if primary controls from the list of requirements could be identified.
- Communication required – Put emphasis on communication as a needed function during the scenario and see what type of communication and how often it was needed. - Idea – This headline was used to write ideas that could come up while performing the tasks. These ideas could range from being a controller to something as changing the UI. - Warning – Similar to communication that it described what type of warnings showed
and how often.
A spread sheet for the articulated hauler is presented as an example in Appendix 8: spread sheet from step-by-step procedure.
2.7 Quantitative data analysis
For quantitative data analysis of the step-by-step procedure, the methods described by Saunders, et al., (2016) were deemed appropriate to use. The data consisted of both categorical- and numerical data. The categorical data in the step-by-step procedure was defined as ranked data, which is when the relative position of each case within the data set is known. However, the numerical measures of the position are not known (Saunders, et al., 2016, p. 527). The numerical data are values that can be measured or counted numerically as quantities (Brown & Saunders, 2008) which means that each data value can be assigned a position on a numerical scale.
From the quantitative data extraction performed during the step-by-step procedure, three individual data sheets summarised the tasks that were carried out together with the specified functions and the amount of times they were used. Here the functions equal the controls of the different machines. This is presented in Appendix 8: spread sheet from step-by-step procedure. After this, a data matrix consisting of three columns summarised all the controls and the amount of times they reoccurred during the step-by-step procedure.
The numerical and ranking data in this case would be reoccurrence of each primary controls and the corresponding rank that each control had based on the reoccurrence. Furthermore, the reoccurrence of the controls changed depending on the machine. Since teleoperating construction equipment is expected to have similar limitations as the virtual training simulators in certain areas, e.g. visual feedback, tools which have been implemented in the training simulators for easier operating where also noted. Even though it was not intentional from the start, these experiences where used as contributions to the qualitative data to enrichen the table of requirements and better understand which needs a teleoperator may need. The data for each machine was summarised in individual data matrixes with the following column as variables:
18
Task Function (primary control) Times used Reoccurring need Times used Depending on the machine, the columns of functions and times used could be repeated multiple times. This is presented in Appendix 8: spread sheet from step-by-step procedure. Finally, all the data was summarised in a final data matrix, where each column represents a separate variable for the obtained data. According to Saunders et al. (2016) each matrix row contains the variables for an individual case. This resulted in three columns applied for all three machines:Number Primary control Frequency of use (FoU)
2.8 Idea generation
For the idea-generation phase of this research project, (IDEO, 2015) was used for reference when investigating valuable methods for creating solutions for the concept and thesis aim. The following three methods were identified as useful.
- Brainstorming (IDEO, 2015, p. 94). - Bundle ideas (IDEO, 2015, p. 97). - Create concepts (IDEO, 2015, p. 108).
A couple of additional methods were also investigated but discarded. One of them being Co-creation session (IDEO, 2015, p. 109), with the motivation that it was impossible to include relevant stakeholders other than the authors during the period of this thesis project. Additional methods were also investigated in another literature, d.School bootleg (2018), but this literature offered no additional method which seemed valuable and was therefore not used. The idea-generation process was done continuously over a period of two and a half week to minimise any memory-loss.
In the following sections, the three used methods will be explained alongside a description of how it was used in this thesis project.
2.8.1 Brainstorming
Brainstorming is a method for creating many ideas and energise the research team. It works bests when those who are participating in the activity are optimistic and have a positive attitude. The aim is not to be critical of ideas but to generate as many as possible, even though they might be farfetched or unrealistic to implement. Brainstorm sessions should revolve around a question visible to all attendees (IDEO, 2015, p. 94). To make the brainstorming sessions as valuable as possible, IDEO proposes a set of rules to keep those who participate active and alert. See Appendix 9: Brainstorm rules for these guidelines proposed by IDEO (2015, p. 95).
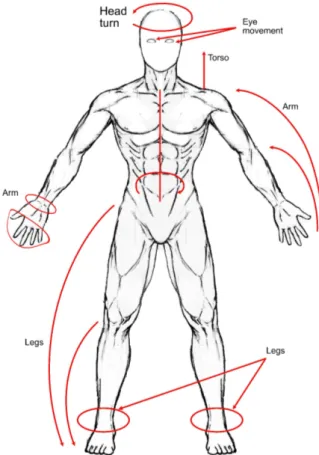
When creating brainstorm questions in this thesis project, the following two steps of the idea generation process was already set. The questions where therefore designed to make the following step (bundle ideas) easier. Since the human body limits the amount of input methods to primary controllers, the anatomy of the human body was used as a basis for the brainstorm questions. The human body was therefore divided into four sections: head, torso, arms and legs. Each section consisted of multiple movements as illustrated in Figure 9. Based on this, one question was formulated which became the brainstorm question:
- How can (specific section) be used as an input method for a 3-1 platform and for which function?
19
Figure 9. Input methods based on the human anatomy.In total, four brainstorm runs where done so that ideas existed for each “section”. The brainstorming sessions where done as follows:
- Question one was written on a white board.
- Individual brainstorming was done for five minutes. - Present ideas to the other brainstorming attendee. - Repeat process for the four versions of the questions.
By the end, a total of 90 ideas had been created. These ideas where then used for the following step, bundle ideas.
2.8.2 Bundle ideas
Bundling ideas is a method to combine the ideas into concepts. The end goal is to combine the best ideas together in such a way that it creates a “full” concept. By using the ideas from the brainstorm sessions, try combining them in different ways. Some ideas may only be partially relevant when put into context of a full concept, discard the bad parts of that idea, and use only those who add value (IDEO, 2015, p. 97).
When bundling ideas, all ideas where kept separated in relative to their part of the human body (i.e. arms, torso, etc.). Ideas for each section could easily be paired together as they had been noted on post-it notes. By continuously discussing mixtures of ideas, experimental concepts where combined to try and find a relevant combination. Any new ideas which where spawned during this stage of the project where written on new post-it notes.
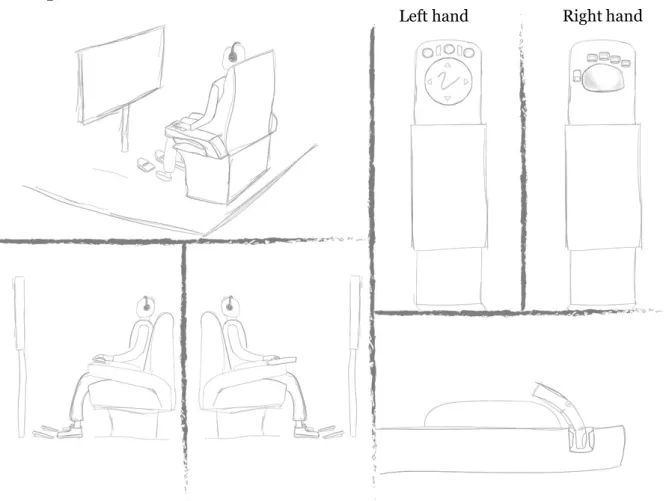
To gain a feeling of how these concepts would work, the concepts were visualised and functions to each concept where mapped out. The visualised concepts are presented in section 4.3.1 “Concept creation”, mapping of functions are presented in Appendix 10: Mapped functions to concepts.
20
2.8.3 Create a concept
This part of the idea generation process aims to further refine the bundled ideas (concepts). Put the concepts in a place so all attendees can see and understand them. Whilst keeping the insights and research aim for the project in mind, utilise the best ideas and combine them in the best possible way Brainstorm sessions should revolve around a question visible to all attendees (IDEO, 2015, p. 108).
In this final part of the idea-generation process, each concept was utilised as a basis of ideas. Using the same method as in the previous step, the best ideas was put together into a final solution. What differentiated this session from when “bundling ideas” was that functions had been mapped to each idea, providing a much more detailed “feeling” for how these concept work in reality.
2.9 Research quality
The research in this master thesis consists of qualitative and quantitative methods and data. Because of this reason, there are more research quality criterion or consequences affecting the thesis. The consequences in turn, affects the quality of the findings derived from the data analysis putting limitations. Therefore, to avoid the limitations negatively affecting the thesis; the better research quality of the thesis the fewer problems will be experienced during the research (Lærd Dissertation, 2020). The most relevant criteria for evaluating the quality of the research for this thesis work are reliability and validity. While the criterions are specific for quantitative research, the criteria for qualitative such as transferability can be synonymous with generalisability or external validity. The same goes for credibility and reliability. For this reason, it was considered more appropriate to only focus on reliability and validity.
2.9.1 Validity
Validity refers to the appropriateness of the measures that are used, the accuracy of the analysis of the results and generalisability of the findings. Validity can be sectioned into several perspectives, with internal validity and external validity being the most common. Internal validity is important because it determines whether the conclusions that are made in the thesis are accurately reflected from what was studied i.e. the research accurately demonstrates a causal relationship between two variables (Saunders, et al., 2016) such as observations and conclusions. External validity refers to the way a study’s research findings can be generalised to other relevant contexts e.g. new settings, groups etc. The external validity of the research was strengthened by providing full description of the thesis aim, the research questions-, design and by making sure that all the necessary data collection methods, findings, interpretations and analysis were described in a way that made it as generalised as possible. Internal validity of the research increased by choosing participants for the interview based on their competence and work experience. The internal validity of the thesis was further strengthened by not putting any systematic bias (sampling error) towards the participants while conducting the interviews. This meant that the participants were selected based on having a relevant connection to construction machines, teleoperation, or automation.
2.9.2 Reliability
The criteria of reliability refer to a research’s consistency and replication. In other words, the purpose is to ensure that other researchers can replicate the research design and reach the same results (Saunders, et al., 2016).
The reliability of the observations, semi-structured interviews was strengthened by the means of internal reliability described according to Saunders, et al. (2016). By using more than one researcher within a given project to conduct the research methods and analyse the data to the extend where they both agree about the data and the analysis one can strengthen the internal
21
reliability. Since the thesis is researched by two students it was possible to elevate the strength of the reliability. The reliability of the literature review is strengthened by the detailed methodology and the findings. Utilising certain inclusion and exclusion criterions presented in the literature review further strengthens the possibility of replication.Furthermore, the consistency of the project is strengthened through the utilisation of an electronic diary where the steps taken are written down and through the help of illustrations and pictures to not forget important details.
The reliability of the thesis was further strengthened by using peer-reviewed scholarly literature such as journal articles, conference articles, books and other reference materials. The literature was searched from the databases ScienceDirect and Scopus whom both are Elsevier platforms. Scopus is the largest source neutral abstract and citation database of peer-reviewed literature which generates precise citation search results of scientific journals, books, conference papers and many more (Elsevier, 2020). ScienceDirect offers, through subscription-based access, full-text of academic journals, conference papers and e-books.
2.9.3 Consequences for research quality
Unfortunately, as the COVID-19-situation of 2020 unravelled during this thesis project, the company had to temporarily be shut down, making the real-life test impossible to follow through and leaving consequences for the research quality. For example, the strength of the validity was negatively affected by the limited communication to relevant people who could help out with evaluating the data that was gathered.
22
3 Theory
This section consists of the theoretical framework for this thesis project. It explains challenges with teleoperating machines, and how you create telepresence for the teleoperator. Features which is enabled by teleoperations is also brought up by utilising experiences from work environments, different to those of teleoperated CM
3.1 Telepresence
Telepresence is a word which (Tripicchio, et al., 2017, p. 1553) defines as “the possibility to
drive the machine without having to be in its proximities”. In this theoretic part of the thesis,
the term will be used as a thematic way of describing cognitive inputs for the operator when operating the machine. This includes “Visual feedback”, “Haptic feedback” and “Audible feedback”, all of which are described in the following three sections.
Moving the operator from the machine into a remotely controlled environment creates both opportunities and challenges. The challenge being that an experienced driver may miss some of the feedback usually provided when operating the machines if suddenly “moved” to a teleoperation platform where this type of feedback must be recreated. The opportunity however lies in the adjustability of the feedback. A teleoperations platform should only provide the operator with the necessary information, irrelevant feedback should be filtered and not be presented to the driver (Tripicchio, et al., 2017, p. 219).
3.2
Visual feedback
A large part of creating “telepresence” is to transport visual information from the machine to the teleoperator. Typically, visual information is transmitted from the machine to the teleoperator using cameras and sensors.
One challenge for teleoperating construction equipment is to determine the amount of views available to the driver, their position and angle so that references on the machines are given. There is no “universally best” position for the cameras, so the ideal view is dependent on the task (Su, et al., 2015, p. 292). Furthermore, transferring a camera feed from a teleoperated machine to an operator platform does not translate perspective very well to the teleoperator. This results in a lower efficiency rate in comparison to if the operator was sat inside the machine (Tanimoto, et al., 2016, p. 173). To get around this issue Tanimoto, et al. (2016, p. 178) suggests an artificial shadow of the bucket tip which is displayed on the teleoperator screen on the ground directly below the bucket of an excavator. This is a method to gain perspective when construction equipment is teleoperated.
Furthermore, sensors on the machines are the only way to explain the environmental context to the teleoperator. A multiple set of navigational instruments is therefore needed in order to operate safely (Man, et al., 2018, p. 2678).
3.2.1 Haptic feedback
Another factor which goes missing when the operator is moved from the machine onto a teleoperation’s platform are physical movements of the machine. Although providing all vibrations from the machine to the teleoperator may not be optimal, delivering a reduced amount of feedback may certainly help the teleoperator (Dadhich, et al., 2016, p. 219). Further development is needed for it to be beneficial to the operator (Tripicchio, et al., 2017, p. 1559). Haptic feedback incorporated into joysticks for excavators has been proposed as way of incorporating haptic movements into teleoperation’s platforms (Tripicchio, et al., 2017, p. 219). Other solutions used is recreating the movements of the machines onto the entire platform (Dadhich, et al., 2016, p. 220).
23
3.2.2 Audible feedback
Telepresence also includes audible feedback which frames the operator audible input from his/her surroundings. This includes both sounds coming from the machine and the environment around it. As with haptic feedback, audible feedback should be calibrated so that disturbing noises is filtered out and only sounds which can be of importance to the operator remains. By doing so, the stresses put on the teleoperator can be minimised (Dadhich, et al., 2016, p. 219).
In other application of teleoperated machines (i.e. outside the realm of construction equipment), tests with operators show that alarms should be accompanied by sounds to attract attention (Man, et al., 2015, p. 2679) .
3.3 Fleet control
In applications where complex autonomous manoeuvring is applicable, it is essential to provide the operator with several types of information. In autonomous intercontinental ships for example, graphical interfaces have been designed to provide the operator with warnings if any action is required. These interfaces have been developed specifically for teleoperations of such applications as they are not needed for “conventional operation” of the platforms. This graphical interface also provides the operator with information regarding which mode the vessel is in, i.e. if each specific machine is being run in “autonomous mode” or “manual control”-mode (Man, et al., 2015, p. 2676).
In intercontinental shipping voyages overseas, the ships are mostly run autonomously by computers, where one operator overwatches several vessels at once. This operator is based on a control station at land where the person can overlook the system, looking into details of each ship at any time (Man, et al., 2015, p. 2676). In an application where machines spend most of their time being controlled autonomously by computers, the main task of the teleoperator will most likely be to scan, monitor and mapping activities to different screens (Man, et al., 2015, p. 2678).
A challenge with managing a fleet of machines are when shift changes happen. It creates a critical discontinuity point when monitoring machines 24/7. Teleoperations could potentially remove this issue by momentarily handing over the control of a set of machines into other control centres. This works when shift changes are asynchronous, e.g. if hand overs are done to different parts of the world where time zones differ (Wahlström, et al., 2015, p. 1044).
3.4
View sharing
Direct view sharing in between machines is another opportunity which could be enabled by teleoperations. As discovered in a study where autonomous metro-system operators practiced an emergency scenario, being able to share camera feeds to other parties, e.g. emergency services, would allow for more efficient handling of an emergency (Wahlström, et al., 2015, p. 1043).
24
4 Project process
This section of the report aims to present partial/interim results which has been used to answer the RQs. It also provides additional information regarding how methods have been utilised to reach insights with the purpose to clarify the process of this thesis project.
4.1 Qualitative data – process and outcomes
4.1.1 Interview and observations process
The unstructured interviews where the start of this thesis project and provided insights which guided the thesis project in its early stages. Speaking with different people inside the company with different level of engagement to teleoperations and automation provided useful information which shaped questions for the semi-structured interviews along with how relevant observations could be done. The observations included both operating the CM in reality and virtual environments. Performing tests like these provided first-hand insights into difficult parts of operating, along with other challenges which operators have to face.
4.1.2 Insight statements
When the interviews and observations-sessions had been performed, the data was analysed according to the method described in section 2.7 “Quantitative data analysis”. The outcome was several insight statements, categorised into the following themes.
- Teleoperating three different machines. - Teleoperating in general.
- Automation. - Operating a site.
- Operating an excavator.
- Applications of the company’s machines.
All insight statements are summarised interpretations from the interviews and observations done by the authors and are presented in Appendix 4: Insight statements. It is important to be aware of that these insights consist of a mixture between information gathered from people from both inside and outside the company.
4.1.3 Scenario selection process
The chosen scenario has already been presented (see section 2.6 “Quantitative data collection: Step-by-step-procedure”), the motivations for the chosen scenario is presented below.
In this thesis project, four different scenarios where created. The purpose of creating four scenarios was to be able to compare and discuss relevance together with a supervisor from the company and then choose the most optimal based on ability to test and future applications. This scenario was chosen over the other created scenarios (see Appendix 5: Defined scenarios) with the following motivations.
- Only defined scenario which was possible to recreate in a virtual environment or using the company’s resources.
- Between the scenarios, this was the most likely usage of a teleoperation’s platform within the given time frame (see insight statements).
- A common usage of the machines is in quarries.
All the scenarios where also presented to the supervisor at the company. The supervisor agreed on the choice of scenario.