19
99
60
[s
H.3
O ='5
VTI notat 78-1999
Laser RDT
Beskrivning av metod för deflektionsberäkning
Författare
Peter Andrén
FoU-enhet
Drift och underhåll
Projektnummer
80261
Funktionsmodell för rullande
deflektionsmätare
Projektnamn
Uppdragsgivare
Vägverket
Distribution
Fri
Väg- och transport
forskningsinstitutet
I
Innehå"
1 Bakgrund
2
2 Laserutrustningen
3
3 Mätprincipen
4
4 Olika mått
I
6
4.1 Nedböjningsarea . . . ..
6
4.2 Baslinjemått . . . .
7
4.3 Krökningsradie . . . .
8
5 Slutsatser 96 Referenser
10
1
Bakgrund
VTI har på uppdrag av Vägverket under ett antal år utvecklat en rullande bärighetsmätare, Laser Road Deflection Tester (Laser RDT). Den första prototypen byggdes på en Volvo Titan, årsmodell 1964 (Figur 1.1 (a)). Mätningar med denna första prototyp visade att det är möjligt att med hjälp av avståndsmätande lasrar mäta nedböjningen bakom bakhjulen på en tung lastbil i rörelse. Mot bakgrund av de kunskaper man erhållit med detta mätfordon byggdes en andra prototyp baserad på en special-byggd lastbil av märket Scania, typ R143ML (Figur 1.1 (b)).
Föreliggande notat beskriver metoder och resultat för deñektionsberäkningar. Detta notat ingår i en serie notat rörande tester och utvecklingen RDT:n. De andra notaten är: Brustest hösten 1997 av Peter Andrén och Hans Velin [2], Passbitskalibrering och kalibrering mot vätskeyta av Peter Andrén och Hans Velin [3], samt Dynamisk bakaxelmätning. Analys av mätningar i vägsimulator av Roland Östergren och Georg Magnusson [4].
Eftersom det hittills har mätts mycket begränsat med RDT:n har inga standardiserade beräknings-rutiner utvecklats. Det som presenteras i föreliggande notat är dels allmänna mått, och en del resultat från olika försök. I takt med att RDT-projektet utvecklas är det troligt att många nya rutiner för deflek-tionsberäkningar kommer att se dagens ljus.
En någorlunda heltäckande beskrivning av deflektionsberäkningar borde också innehålla ett kapitel
om teoretiska resultat, men mycket litet har gjorts på det området inom RDT-projektet ännu. Dock bör det ges relativt hög prioritet att konfirmera de uppmätta resultaten med simulerade försök, genom ñnita element metoden eller dylikt.
/ ,v
/
//
'/ // /,., / , ,. //(a) Den första prototypen (b) Den andra prototypen
2
Laserutrustningen
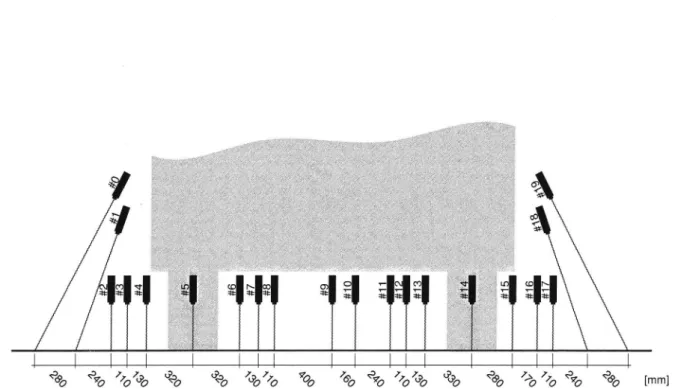
Fyra olika typer av lasrar (med laser menas genomgående Selcom Optocator typ 2008) används vid mätningen (se Tabell 2.1 och Figur 2.1).
Tabell 2.1: Olika typer av lasrar
Placering Stand-Off (SO) Measurement Range (MR) Upplöning #0, #19 1178 mm 400 mm 0,1000 mm #1, #18 853 mm 330 mm 0,0825 mm #2, #9, #17 - 390 mm 180 mm ' 0,0450 mm #3-#8, #10-#16 390 mm 128 mm 0,0320 mm
Lasrarnas mätområde delas in i 4000 ekvidistanta delar, så kallade laserenheter (kallas även bitar).
Vid lodrätt mätning motsvarar varje laserenhet den upplösning given i tabellen ovan, vilket är de skalfaktorer som leverantören har uppgivit för respektivetyp av laser. Lasrarna levererar mätdata med 32 kHz, vilket innebär att datainsamlingsprogrammet bildar medelvärde över 32 mätvärden då sam-plingshastigheten väljs till 1 kHz (det normala) och antal redovisade laserenheter kan innehålla deci-maler.
Mätbalkarnas placering på mätfordonet framgår av Figur 3.2. Lasrarnas placering, numrering och inbördes avstånd framgår av Figur 2.1. För frambalken betecknas lasrarna med F0-F19, och B0-B19
används för bakbalken. *71* //; ,/ ' r, m/ // 0/ W/ø/âzç,//á/4/ 5/ ; // / // y/ 7/1/ 7." , /Ö / , . .. -7 0 t? 7 7 7 7I <3 7 7 (9 6) 7
3
Mätprincipen
RDT:n mäter vägenstvärproñl 250 centimeter bakom framhjulen, där vägen anses vara opåverkad av hjulkrafterna, och 50 centimeter bakom bakhjulen. Genom att subtrahera framprofilen från bakproñlen erhålls en så kallad differensproñl. Differensproñlen ligger sedan till grund för alla beräkningar som görs. Principen bakom RDT:n illustreras i Figur 3.1 och Figur 3.2.
Innan differensproñlen beräknas nollas de både tvärprofilerna. Det det menas att båda profil-ernas ytterpunkter sätts till noll, och de övriga punkterna lyfts/sänks linjärt. Egentligen räcker det med att linjärförflytta en proñl till den andra eftersom de ska subtraheras från varandra, men noll-ningsförfarandet gör jämförelser mellan olika vägar lite enklare.
På grund av rörelser i bilen och vägens makrotextur bör man inte jämföra enstaka proñler med varandra. Istället beräknas ett medelvärde över en lämpligt lång sträcka. Vad lämplig är beror på en rad faktorer. Generellt sätt kan man säga att ju mer man vet desto kortare sträcka kan man ta. Vet man inte hur bilen har rört sig bör man inte ta en kortare sträcka än bilens svängingsvåglängd, vilken är ungefär lika med hastigheten multiplicerat med en sekund (en svängning på cirka en Hz). Sen finns det naturligtvis en del praktiska aspekter också; till exempel är väginformationsdatabaser ofta baserade på tjugometersintervall, vilket då blir en lämplig längd.
Frambalken N 1- 1-ä .ä 0 Bakbalken .0 .. .. "5 :n: 2; F :3; :t
Figur 3.1: Illustration av principen för RDT:n. Subtrahera framprofilen från bakprofilen. Se även Figur 3.2.
d m . a n 90 :5 ot aöåp âo w : 2 : 3 a n å :B U 8 8 : 0 5 o n 8 8 m e 09 39 23 0 mo t åêm m ;F ra m 8 8 : 5 :o mözc m N m 3 m e ÖV _ \ §4 \
VTI NOTAT 78-1999
4
Olika mått
Vilka mått som relaterar till olika egenskaper i vägen är ännu ganska okänt. En med något mått stor differensproñl bör rimligtvis påvisa en svag väg, och vice versa. Därifrån är dock steget långt till att dra några slutsatser om vägens strukturella uppbyggnad, och hur man ska få fram tillförlitlig information olika lager, etc. Nedan presenteras ett par mått som använts, och en del som inte använts i någon större utsträckning ännu.
4.1 Nedböjningsarea
Nedböjningsarean beräknas som illustreras i Figur 4.1; differensprofllen beräknas som vanligt, varefter arean beräknas med trapetsregeln, eller någon annan numerisk integration.
Figur 4.1: Arean mellan de två proñlerna ger ett mått på bärigheten.
Nedböjningsarean är ett robust mått eftersom alla lasrar påverkar ungefär lika mycket. Om någon eller några lasrar skulle vara dåligt kalibrerade eller av annan anledning inte fungera riktigt som de ska kommer slutresultatet inte att påverkas särskilt mycket. Figur 4.2 visar resultat från verkliga mätningar, och trots att det finns anledning att tro att de yttre lasrarna på vänster sida är något felkalibrerade ser det Överlag bra ut, och resultatet blir rimligt. "
Arean av nedböjningsprofilen i tvärled
0.3 I I l I I I I l I I I I I I I I I I . . . , . . . i . , . . . . .(106l . . . , . . . l _ , _ _ . _ u i _ _ . _ _ t . _0.24_ . . . _6_ 30 km/h _042_ i . . . i i . . . V . . . . V . . . , . . . .. + 50 km/h _ + 70 km/h
E E
Figur 4.2: Nedböjningsareor från mätningar.
Försök visar att nedböjningsarean korrelerar väl mot bärigheten i undergrunden (vilken erhållits från fallviktförsök). I artikeln Evaluating Subgrade Properties With a High-Speed Rolling
Deflec-tometer av Peter Andrén och Carl A. Lenngren [1] presenteras en rad försök som visar korrelationen
mellan nedböjningsarean och bärigheten. I Figur 4.3 visas resultatet från försök vid Torsby Önnerud. De tunna svarta linjerna illustrerar nedböjningsarean (vänster y-axel) vid två hastigheter, och den tjoc-ka svarta linjen anger bärigheten i undergrunden (höger y-axel). Som synes blir nedböjningsarean liten vid partier med styv undergrund och vise versa. Det är ännu för tidigt att jämföra värden med varandra, och försöka dra slutsatser om bärigheten i pascal från en yta i mm2, men att hitta områden som är sämre än sin omgivning är görbart.
Torsby Önnerud northbound
700 I I I I I 1 I I I I I I I I I I I I I I I 800 + 50 km/h 560 -ak- 70 km/h 640 N 420 . _4 A . . . ..-480 E Al . ° . . \ A .i . l m - V \ nåd-j
5280'
. . . . ...-320
140 . .. .. .. . . ....1600
10 i»
i: '9 'e 0
' 790 970 ' ?90 000 »90 (970 Figur 4.3: Nedböjningsarean jämfört med bärigheten i undergrunden.4.2 Baslinjemått
Baslinjemåttet definieras enligt Figur 4.4. Eftersom lasrarna är placerade symmetriskt kring de lasrar som sitter bakom bakhjulen (se Figur 2.1) kan flera baslinjemått beräknas. I enlighet med differenspro-ñlen skall detta mått beräknas för både fram- och bakprodifferenspro-ñlen och differensen mellan dem tas. Dessa
mått betecknas med bXX där XX står för avståndet från centrumlasern till den laser som används som
referens. I Figur 4.4 är det alltså b45 som beräknas. b30, b45 och b56 kan beräknas för både höger och vänster sida. Detta mått kräver att lasrarna är väldigt bra kalibrerade, eftersom en liten störning hos bara en laser påverkar slutresultatet. Genom att beräkna alla tre baslinjemått för flera olika hastigheter kan man antagligen säga något om vägens egenskaper närmare ytan, vilket är svårt att göra utifrån nedböjningsarean. b45
lll
I
III
111 '15 30 30 '15 '11' [om] Figur 4.4: Baslinjemåttet. Här för b45.VTI NOTAT 78-1999
7
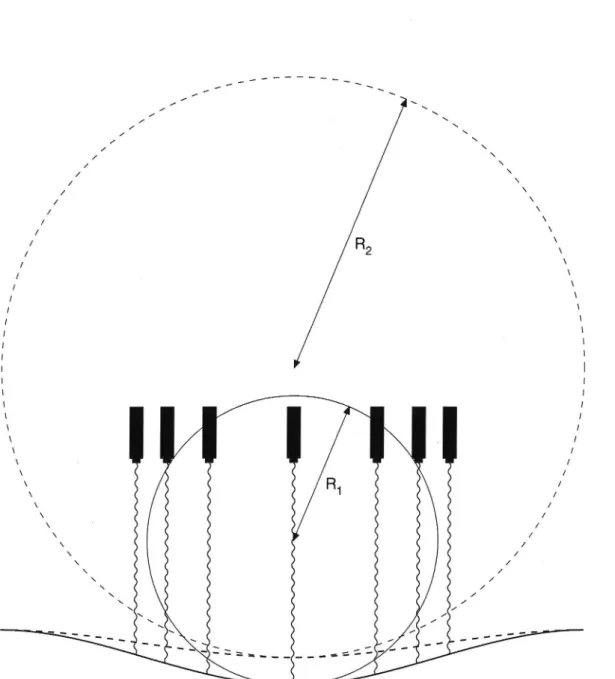
4.3 Krökningsradie
En variant till baslinjemåttet skulle kunna vara att använda ett krökningsmätt av differensproñlen. För att detta skall vara görligt måste man först anpassa den frammätta profilen med en kontinuerlig proñl, med kubiska splines eller i form av ett polynom. Också detta mått kräver att lasrarna är väldigt bra kalibrerade om man ska kunna lita på resultaten. I enlighet med baslinjemåttet är krökningen intressant eftersom det antagligen beror i hög utsträckning på vägens egenskaper i de Övre lagren; en styv väg borde ge en lokalt låg nedböjning och stor krökning (streckat i Figur 4.5) medan en svag väg ger en mindre krökningsradie (heldraget i Figur 4.5).
\ I \ I \ I \ W / \ l \ Y' '\ I \ / \ / \ / \ / \ / \ ' / \ / \ / \ / \ / \ / \ / \ / \ / \ / \ / / \ / \ / \ /
Figur 4.5: Krökningscirklar för en svag (heldragen) och en stark (streckad) väg.
5
Slutsatser
Att säga att det är mycket kvar att göra på området mätdataanalys inom RDT-projektet är inte en överdrift. Till dags dato har alla instrument som finns monterade på RDT:n inte ens kalibrerats på ett tillfredsställande sätt, och de som har kalibrerats går antagligen att kalibrera noggrannare. De första stora utvärderingar av mätdata som gjorts visar dock att maskinen fungerar som tänkt, vilket måste anses vara en framgång med tanke på hur lite resurser som använts till detta.
Förbättringar som kan göras är många, men till syvende og sidst går allting ut på att få en bättre bild av hur RDT:n rör sig på vägen och vad man egentligen mäter. Några sätt att åstadkömma detta är
0 ta hänsyn till krafterna i bakaxeln vid beräkningarna, 0 förbättra kalibreringen av lasrarna,
o använd inte data med låg kvalitet, 0 jämför med andra mätfördon,
o köra på instrumenterad väg.
Med hjälp av Signalbehandling kan man säkert förbättra resultaten ytterligare, men även där måste man veta vad man letar efter, vilken i sin tur kräver stor kunskap om RDT:ns alla egenskaper.
6
Referenser
[1] Peter Andrén och Carl A. Lenngren. Evaluating Subgrade Properties With a High-Speed Rolling Deflectometer. Ej publicerad.
[2] Peter Andrén och Hans Velin. Brustest hösten 1997. VTI Notat 78-1999, Väg- och transport-forskningsinstitutet, 2000. '
[3] Peter Andrén och Hans Velin. Passbitskalibrering och kalibrering mot vätskeyta. VTI Notat
77- 1 999, Väg- och transportforskningsinstitutet, 2000.
'[4] Roland Östergren och Georg Magnusson. Dynamisk bakaxelmätning. Analys av mätningar i vägsimulator. VTI Notat 69-1998, Väg- och transportforskningsinstitutet, 2000.