Fakulteten för teknik och samhälle
Examensarbete
15 högskolepoäng, grundnivå
Smarttelefon-sensorernas möjligheter
En studie om barometer-, GPS- och accelerometersensorer
The smartphone sensor possibilities
A case study featuring the barometer, GPS and accelerometer
sensors
Christos Mylonas
Samir Đulić
Examen: Högskoleingenjörsexamen Handledare: Ange handledare
Huvudområde: Datateknik
Datum för slutseminarium: 2013-08-28
Examinator: Tommy Andersson Handledare: Ivan Kruzela
Förord
Detta arbete skulle inte vara möjligt utan hjälp av många människor. Av utrymmesskäl avgrän-sar vi vår tack till de fyra viktigaste personer.
Främst vill vi tacka Dr. Ivan Kruzela för hans många värdefulla tips och uppslag som betydde mycket för arbetets kvalitet och betydelse. Dr. Gion Koch Svedberg har gett oss stöd och råd när det behövdes som mest.
Vi vill rikta en extra varmt tack till Olivia Månsson som har generöst låtit oss använda hennes färgkritor som vi använde vid våra geodetiska mätningar.
Vi vill också tacka Jens Wittmiss från Institution för Mediateknik och produktutveckling för lånet av avvägningsinstrument och för hans värdefulla tid när han lärde oss att använda den.
Abstract
This report summarizes the results of a degree Bachelor of engineering in Computer Science conducted by two students at Malmo University.
Work aim was to conduct a variety of experiments with accelerometer, barometer and GPS in a modern smartphone. A number of scenarios for a possible sensor use in applications formulat-ed to guidformulat-ed experiments. Data is carefully documentformulat-ed and analyzformulat-ed, with the intention to create a database of information for future studies. Analysis of the data includes the altitude determination in nature and in buildings using barometric sensor, geographic location using GPS, speed and acceleration during an elevator journey with the help of accelerometer.
The report contains a comprehensive literature review on the use of sensors for indoorposition-ing. From our analysis of the measurement data, we conclude that it is possible to calculate the altitude from barometric- information but good accuracy if there are optimum circumstances. GPS altitude from our measurements show faulty height by a large margin compared with the actual height and when it is compared with the calculated height of the barometer the baro-metric height is closer to the actual height.
By performing a numerical integration of the accelerometer data, the results show that it is possible to calculate approximately how far you have traveled in meters in an elevator, howev-er thhowev-ere are some things that must be taken into considhowev-eration.
Sammanfattning
Denna rapport sammanfattar resultat av ett examensarbete på en högskoleingenjörsutbildning som utfördes av två studenter på Malmö högskola.
Arbetets syfte var att genomföra en mängd olika experiment med accelerometer, barometer och GPS i en modern smarttelefon. Ett antal scenarier för en tänkbar sensoranvändning i appli-kationer formulerades för att vägleda olika experiment. Experimentdata dokumenterades nog-grant och analyserades med avsikten att skapa en databank med information för framtida stu-dier. Analys av data inkluderar höjdbestämning i naturen och i byggnader med hjälp av barome-tersensor, geografisk position med hjälp av GPS, hastighet och acceleration under en hissfärd med hjälp av accelerometer.
Rapporten innehåller en omfattande litteraturstudie om användning av sensorer vid inomhus-positionering. Från analys av mätdata, kom vi fram till slutsatsen att är möjligt att beräkna höj-den från barometerdata med bra noggrannhet under optimala omständigheter. GPS höjhöj-den från mätningarna har stor felmarginal jämfört med den verkliga höjden samt när den jämförs med den beräknade höjden från barometern.
Genom att utföra en numerisk integration på accelerometer-data kom vi fram till att det är möj-ligt att beräkna ungefär hur långt man har färdats med en hiss, dock att vissa detaljer måste tas i beaktning.
Akronymer
API Application Programming Interface CPU Central Processing Unit
CSV Comma-separated value
DGPS Differential Global Positioning System DSP Digital Signal Processing
GNSS Global Navigation Satellite System GPL GNU General Public License GPS Global Positioning System IMU Inertial Measurement Unit INS Inertial Navigation System
ISA International Standard Atmosphere MEMS Micro-electro-mechanical systems OEM Original Equipment Manufacturer PDR Pedestrian Dead-Reckoning system RSS Root Square Sum
Innehållsförteckning
1. Inledning ... 1 1.1. Bakgrund ... 1 1.2. Syfte ... 1 1.3. Problemformulering... 2 1.4. Avgränsning ... 2 2. Metod ... 33. Vetenskapliga studier med accelerometer och barometer ... 4
3.1 Inledning ... 4
3.2 Vetenskapliga källor om barometermätningar... 4
3.2.1 Studie 1- Parviainen et al. ... 4
3.2.2 Studie 2- Yun-Ki Kim, et al. ... 6
3.2.3 Studie 3- Iozan et al. ... 9
3.2.4 Studie 4 Kim et al. ... 10
4. Teknisk bakgrund ... 12 4.1 Inledning ... 12 4.2 LG Nexus 4 E960 ... 12 4.3 Androidplattformen ... 13 4.4 Sensorer ... 13 4.4.1 Accelerometer... 14 4.4.2 Barometer ... 14 4.4.3 GPS-funktion ... 15 4.5 AndroSensor... 15 4.6 Avvägningsinstrument ... 16 4.7 Data från smarttelefon ... 17
5 Mätsträckan för applikation enligt Scenario 1 ... 18
5.1 Inledning ... 18
5.2 Val och kalibrering av mätområdet ... 18
5.2.1 Mätområdet ... 18
5.2.2 Mätning av höjdskillnader ... 19
5.2.3 Mätning med Runkeeper ... 21
5.2.5 Beräkning av avstånd mellan GPS punkter ... 24
6. Experiment med barometer i mätområdet ... 25
6.1 Inledning ... 25
6.3.1 Jämförelse mellan samplad och uppmätt data ... 25
Jämförelse mellan uppmätta barometervärden ... 28
7. Barometer och accelerometer experiment enligt scenario 2 ... 29
7.1 Inledning ... 29
7.2 Kranen ... 29
7.3 Turning Torso scenario 2 och scenario 3 ... 30
7.3.1 Inledning ... 30
7.3.2 Undersökning av mätningar med barometern scenario 2 ... 30
7.3.3 Analys av accelerometerdata i Turning Torso färdberäkning scenario 3 ... 32
8. Diskussioner och slutsatser ... 38
8.1 Diskussion ... 38 8.1.1 Barometer ... 38 8.1.2 GPS ... 39 8.1.3 Accelerometer... 39 8.1.4. AndroSensor ... 39 8.2 Slutsatser ... 39 8.1.5. Framtida utveckling ... 43 9. Referenslista ... 44 Figurförteckning ... 47 Bilagor ... 48
1. Inledning
1.1. Bakgrund
Dagens mobiltelefoner används inte enbart för att ringa och sms:a. Komponenterna och mjuk-varan i mobiltelefonerna har under de senaste åren blivit alltmer avancerade. Detta har med-fört att mobiltelefonerna idag kallas för smarttelefoner (eng. smartphones) och är egentligen portabla datorer. Dessa smarttelefoner har inte enbart en avancerad mjukvara och kraftfull hårdvara, utan de har även en mängd olika inbyggda sensorer för att mäta omgivningens på-verkan.
När dessa sensorer blir allt noggrannare med tiden utökas deras användningsområden genom applikationer som har tillgänglighet till dessa sensorer med olika operativsystem.
Sensorteknologin är under en dynamisk utvecklingsfas men har inte testats tillräckligt för att ge en klar uppfattning om dess maximala användbarhetsförmåga. Tekniken måste testas i olika användningsområden för att få en större uppskattning av vilka begränsningar som existerar för specifika sensorer i diverse sammanhang.
1.2. Syfte
Syftet med detta examensarbete är att experimentellt undersöka egenskaper hos sensorerna i en smarttelefon och att utvärdera deras användbarhet vid olika situationer.
Själva examensarbetet kan ses som en pilotstudie. Ett medvetet val gjordes i början av arbetet i samråd med handledaren. Istället för att undersöka en tillämpning på djupet, genomfördes en serie av olika väldokumenterade experiment med olika sensorer i olika situationer.
Studiens syfte är alltså att utgöra underlag för andra studenter som ska kunna fortsätta ut-veckla avancerade applikationer med sensorerna.
Ett examensarbete som utfördes av två studenter på Malmö högskola vårterminen 2012 [1], har varit en del av förstudien för detta arbete. I examensarbetet utvecklade studenterna en applikation som utförde sensormätning för operativsystemet Android. Applikationen använde sig av Android API för att få åtkomst till tre sensorer samt samla in och lagra värden från senso-rerna.
1.3. Problemformulering
I förstudien användes diverse sensorer för att inhämta empirisk data från experiment i olika situationer. Analys av data från flera mätområden med Matlab/Excel ledde till större förståelse av sensorernas möjligheter samt bättre uppfattning av vilka användningsområden sensorerna är användbara till.
Det fanns önskemål och diskussioner bland experter på Malmö högskola, Fakulteten för teknik och samhälle (TS), om vilka experiment som var intressanta att utföra och undersöka närmare. Ett ledande företag i smarttelefon-branschen föreslog en närmare undersökning av möjlighet-erna av att använda barometersensor, accelerometer och GPS i nya innovativa tjänster.
För att vägleda arbetet i projektet formulerades tre scenarier:
Scenario 1: En kondition- också kallad fitness-applikation i en smarttelefon som används för att
ge utökad och användbar information för en person som löptränar utomhus. De konkreta frågorna som vägleder är:
Ger GPS-koordinater pålitlig information från en smarttelefon?
Är det möjligt att med hjälp av en barometersensor mäta höjdskillnader noggrannare än med GPS?
Scenario 2: Kan man med hjälp av barometer i en smarttelefon bestämma vilken våning i en
byggnad en person befinner sig på.
Scenario 3: Kan man använda accelerometern i en smarttelefon för att bestämma vad som
händer när en person åker en hiss (hastighet, acceleration, sträcka).
1.4. Avgränsning
Experimenten utfördes med en Android smarttelefon. En smarttelefon innehåller ett flertal MEMS (Micro-electro-mechanical systems) sensorer. Examensarbetet avgränsades till tre sen-sorer: barometer-, accelerometer- och GPS-sensorn.
Då barometern är en relativt ny sensor i smarttelefoner är det intressant att studera dess egen-skaper. Studien går ut på att visa möjligheter och förbättringar av information från GPS-sensorn och information från barometer-sensorn. Betoning av studien är mätning, analys av data och produktion av användbar ”know how” och inte utveckling av ny applikation.
För analys av data användes Matlab och Microsoft Excel. Matlab som är ett välbeprövat signal-behandlingsverktyg som används av många företag och läroverk. För varje utförd experiment som presenteras i studien upprättades ett testprotokoll (TP). Alla TP filer levereras som zip-format tillsammans med slutrapporten.
2. Metod
En förstudie genomfördes som ett första steg för arbetet, för att skapa en bättre uppfattning om sensorernas möjligheter. En litteraturstudie genomfördes genom att studera vetenskapliga artiklar där mätningar från sensorer utfördes och analyserades i situationer liknande temat för examensarbetet. Eftersom arbetet avgränsades till accelerometer, GPS och barometer valdes i samråd med handledare några passande vetenskapliga artiklar som stödpelare för arbetet. De valda artiklarna är: Differential Barometry in Personal Navigation [2], Performance Investiga-tion of Barometer Aided GPS/MEMS-IMU IntegraInvestiga-tion [3], Improved Indoor NavigaInvestiga-tion System Based on MEMS Technology [4] och Performance Improvement and Height Estimation of Pe-destrian Dead-Reckoning System using a Low Cost MEMS Sensor [5].
Efter tydliga avgränsningar och genomförd litteraturstudie utfördes mätningar med smarttele-fonen LG Nexus 4. För att sampla data användes applikationen AndroSensor. Ett testprotokoll skrevs efter varje mätning för att dokumentera alla aspekter av mätningarna samt få fram nog-granna och väldokumenterade mätningar.
Totalt genomfördes sex stycken vandringsmätningar på en vald sträcka i Västra Hamnen. Inför mätningarna användes ett avvägningsinstrument för att mäta höjden över havet på mätsträck-an. Inför denna mätning studerades en geodetisk metod, avvägning som används för att mäta höjdskillnader. Denna mätning var viktig för studien eftersom det behövs bra precision i höjd-mätning för att kunna jämföra med höjdhöjd-mätningar från barometern och GPS. Höjdhöjd-mätningarna är inte exakta men är en bra referens till den verkliga höjden.
Två trappmätningar genomfördes varav en som utfördes på Malmö högskola, Fakulteten för teknik och samhälle (TS) samt två hissmätningar som utfördes på Turning Torso i Malmö. När experimenten var utförda analyserades den uppmätta informationen med programmen Matlab och Excel. Informationen behandlades därefter med en filtrering, en numerisk integrat-ion beräknades enbart för en av Turning Torso mätningarna. Dock kan tilläggas att det finns mer material än vad som kan redovisas i examensarbetet. Alla experiment bifogas i zipfil för framtida användning och utveckling.
3. Vetenskapliga studier med accelerometer och barometer
3.1 Inledning
I detta kapitel diskuteras fyra vetenskapliga artiklar och dess mest relevanta delar för detta ex-amensarbete.
Parviainen et al. [2] (Studie 1) fördjupar sig i att hitta relevanta felkällor i barometersensorn baserat på höjdmätningar i samband med kommersiell navigeringsutrustning. Artikeln nämns och används som referens i barometerstudien av Zhang et al. [3], (Studie 2) där författarna stu-derar möjligheten med att använda en MEMS barometer som förstärkning till GPS/INS applikat-ioner. Ett prototypsystem framtas för experiment som består av en kommersiell GPS-mottagare, en lågkostnads MEMS IMU och barometer. Iozan et al.[4] (Studie 3) undersöker om det är möjligt att bestämma position inomhus med enbart tröghetsnavigering med MEMS sen-sorer. Kim et al. [5] (Studie 4) utför en liknande undersökning där man vill se om det går att be-stämma positionen inne i en byggnad med Pedestrian Dead-Reckoning system teknik (PDR). PDR är en process för att beräkna den nuvarande position genom att använda en bestämd po-sition och föra den popo-sitionen baserad på kända eller uppskattade hastigheter över förfluten tid och kurs. Samtliga författare presenterar förbättrad höjduppskattning av barometersensorn.
3.2 Vetenskapliga källor om barometermätningar
3.2.1 Studie 1- Parviainen et al.
Platsbaserade tjänster blir idag allt populärare, i många situationer är den vanliga GPS-navigeringslösningen från satellitbaserade system inte tillgänglig. I den vertikala riktningen kan tillgängligheten och noggrannheten förbättras genom att tillsätta en barometersensor i syste-met. Dagens MEMS-teknologi möjliggör att barometrar kan integreras i smarttelefoner.
Artikels syfte var att beräkna storleken av störningar i barometermätningar och även beräkna deras effekter på höjdresultatet. Analysexperimentet innehåller resultat om hur barometer-tryckmätning påverkas under en bilfärd och avståndet till en referensbarometer.
Artikeln fördjupar sig i att hitta relevanta felkällor i barometersensorn baserat på höjdmätning i samband med personligt bruk av kommersiell navigeringsutrustning. Data från två MEMS-baserade barometersensorer samlades in från olika scenarier och det observerades störningar som påverkade barometertrycket. Syftet var att separera felkällor genom att använda en känd barometerhöjd som referens. Resultaten visade att barometrar i differentiellt läge gav en mycket exakt höjdmätning, dock att lokala störningar i lufttrycket måste beaktas under utveckl-ing av applikationer som inkluderar barometersensorn.
Sådana applikationer kräver meternivås noggrannhet och även små störningskällor behöver studeras in. Forskningen utfördes med användning av lågeffekt MEMS-barometersensorer. Sen-sorerna som användes var små och kunde lätt vara integrerade med en Global Navigation Satel-lite System-mottagare (GNSS). Tryckgivarna användes för att kunna känna höjdändringar av ett par centimeter. Ett anpassat datorprogram framtogs för att logga data från barometerns
de-mokit via USB-gränssnitt till en dator. I alla barometrar fanns ett systematiskt fel som bör kom-penseras före användning som oberoende tryckgivare.
För att få noggrannhet i höjdmätning med en barometer behövs även en referensbarometer. Höjden av referensbarometern måste vara känd eller åtminstone höjdskillnaden mellan mät-ning på barometern och referensbarometern. Vissa mätmät-ningar genomfördes för att jämföra trycket på olika platser bl.a. i en byggnad. Det var noterbart att trycket inuti byggnaden inte skiljde drastiskt mellan barometrarna. Mest avsevärda fel observerades när barometrarna flyt-tades från insidan till utsidan av byggnaden.
I allmänhet har man noterat att ventilationssystemet gav en konstant temperatur inomhus. Tryckmätningen inomhus hade enbart ett viss metodfel jämfört med tryckmätningen utomhus. Principiellt är det möjligt att använda en referensbarometer inomhus, även om mätningarna utförs utomhus, dock måste man överväga temperaturkänsligheten i barometersensorn.
För att uppskatta barometersensorernas precision utfördes en mätning inne i en byggnad med fem våningar, se Figur 3.1. Under mätningen hölls barometersensorn i handen av en testperson som gick runt i byggnaden, men även färdades mellan våningarna med byggnadens hiss. Det observerades att barometerns lufttryck varierade när testpersonen befann sig på samma våning (tredje våning) men förändrades när denne förflyttades från ett rum till ett annat. Troligen skedde detta pga. varierande ventilationsförhållanden de olika i rummen. Som slutsats kunde författarna konstanter att det tydligt gick att urskilja de olika våningsplan genom barometer-sensorns lufttrycksmätningar.
Figur 3.1. Inomhusmätning
Studien visar att införandet av en liten MEMS-barometer tillsammans med korrekt referens-information kan ge en mycket användbar referens-information för kommersiell navigeringsutrusning.
3.2.2 Studie 2- Yun-Ki Kim, et al.
I artikeln utforskar författarna möjligheten att använda en MEMS barometer som förbättrar GPS/INS applikationer. Ett prototypsystem framtogs för experiment som bestod av en kommer-siell GPS-mottagare, en lågkostnads MEMS IMU och barometer. Alla sensorer är kopplade på en DSP-plattform. Den inledande undersökningen av MEMS barometer riktar sig till ett fältförsök med insamlad data från en bilfärd i ett område med där vägens höjd varierar. Höjdens nog-grannhet anses avgörande när den används i t.ex. flygbesprutning medan den är mindre viktig för fordon.
Under en lång tid har trycksensorer använts som barometriska höjdmätare. Dessa utrustningar har speciella ändamål som höjdberäkning. Med tanke på att barometrar är till för att förbättra systemets prestanda i vertikal riktning är det inget nytt påfund. Kostnaden och fysiska dimens-ionen har bidragit till dröjningen för sådana integrerade system att komma till konsument-marknaden. I dagens läge framtas sådana sensorer med en lågkostnad och i mindre dimension-er genom MEMS sensorteknologi. Barometdimension-ersensorn i ett multisensorsystem kan förbättra till-gängligheten och noggrannheten av positionering i den vertikala riktningen. Det omgivande lufttrycket som mäts med barometersensorn påverkas av svängningar i omgivande temperatur, ventilation m.m.
I denna studie används endast en barometer med syfte att genomföra navigeringsapplikationer som är avsedda för vanliga konsumenter. Utveckling av en lågkostnads multi-sensor integrerade navigationssystem baserat på en DSP-plattform genomfördes och behandlades, tonvikten i stu-dien var att utveckla barometersensorn. En formel för lufttryck och barometrisk höjd nämns här, (formeln förklaras i avsnitt 3.2.4):
( ( ) )
Man utförde en förundersökning till GPS-höjd och barometerhöjd. Båda mätningarna sampla-des på samma position på en fönsterbräda och experimentet varar i 30 minuter. GPS-höjden hade en variation upp till 40 m på en kort tid, dels på grund av de dåliga observationer samt flervägsfel1. Barometriska höjden omvandlades från tryckmätningar med höjdformeln och skil-jer sig till stor del från GPS-höjden.
Liksom de mätfel i både GPS och barometer redovisas. Emellertid, verkar barometrisk höjd vara mer stabil. Den viktigaste felkällan till den barometriska höjden består av metodfel-term, drift-term och brus-drift-term. Metodfel är konstant och kan avlägsnas genom kalibrering. Den så kallade drift-termen orsakas av den långsamma förändringen i omgivande tryck och andra osäkra fak-torer som temperatur, ventilation etc.
1
Flervägsfel är fel som beror på interferens mellan radiovågor som färdats mellan sändare och mottagare, felet uppkommer ofta när signalen studsar mot byggnader.
En av mätningarna som är intressant utförs för att observera känsligheten på sensorns reaktion när höjdnivån ändras. Barometersensorn förflyttas uppåt och nedåt för hand vid ungefärliga frekvensen på 0,5 Hz och med en höjdskillnad, 1,5-2 m, se Figur 3.2. Det visas att den vinkande handen som rör sig upp och ner fångas av sensorn, men en liten avvikelse observeras i kurvan och detta påstås vara på grund av ventilation förändringen under mätningen.
Figur 3.2. Barometer känslighetsmätning
Det initiala experimentet med prototypsystemet utfördes med en vanlig kommersiell bil. Senso-rerna placerades bl.a. på bilens taklucka. Tröghetsmätningsenheten (IMU) var monterad på toppen av biltaket, liksom GPS-antennen som var ungefär halv meter framåt för att undvika störningar som orsakas av det starka magnetfältet.
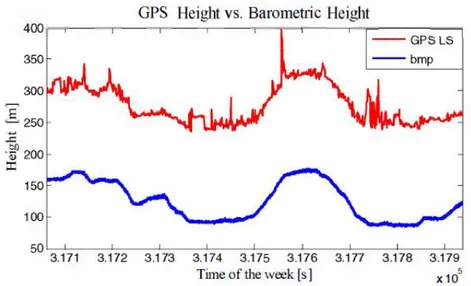
Experimentprototypen, placerades i baksätet inne i bilen. Barometersensorn fixerades på top-pen av bakre sitsen och var ungefär halvmeter under biltaket. Den totala bilkörningen varade i 15 min. Höjdskillnaden på den valda sträckan var ca 80 m. Dessutom omfattade den valda sträckan även en del av en motorväg och en del av ett bostadsområde. Höjdresultaten är i överensstämmelse med varandra och har samma lutning. Dock kan man se den svaga sidan av GPS-positioneringen i den vertikala riktningen i Figur 3.3. GPS-höjden i grafen är skrovlig om man jämför den med barometerhöjden.
Figur 3.3. GPS-höjd jämfört med Barometriskhöjd
Den barometriska höjden visar en variation på cirka 2 m i experimentet medan GPS-höjden lätt överstiger 2 m. Med utjämning (filtrering) reducerades brusnivån av barometrisk höjd, speciellt när det inte fanns stora höjdskillnader. I den filtrerade barometerhöjden reducerades variat-ionerna till mindre än 1 m, se Figur 3.4.
Figur 3.4. Utjämnad barometriskhöjd
Barometersensorn visar goda resultat under fältexperimentet. GPS-höjden visade sig vara rela-tivt korrekt när satellitsignaler var starka, medan den barometriska höjden visade att den var känslig för miljöförändringar såsom ventilation och temperatur. Den barometriska höjden kunde kalibreras av bra GPS-signaler. Utförandet av MEMS barometer som användes i proto-typsystemet utreddes först genom en serie mätning, vilket underlättade genomförandet av prototypsystemet, liksom tillämpningen i bilfärdsexperimentet. Barometersensorn kalibrerades med GPS-höjden under god satellitgeometri.
3.2.3 Studie 3- Iozan et al.
Denna artikel undersöker om det går att bestämma med hög noggrannhet positionen av en testperson inne i en byggnad. Syftet var att undersöka om detta är möjligt utan användning av några ytterligare system eller infrastruktur än med just tröghetsnavigering med MEMS senso-rer. Tröghetsnavigering används främst inom militära områden och då främst av ubåtar eller artilleripjäser. Den bygger på att man med noggrann accelerometer och ett väldigt noggrant gyroskop kan mäta en farkost lägesändringar och utifrån detta beräkna dess position.
Behovet av utförandet av denna vetenskapliga studie är för att navigeringssystem GNSS som i stort sett fungerar överallt även i täta stadsområden, men inomhus finns det oftast ingen täck-ning, eller en mycket svag sådan. Författarnas fokus läggs på gyroskop- och accelerometer sensordata men genom att komplettera med en barometersensor kan de bestämma vilken vå-ning testpersonen befinner sig på. Man har även lagt till ytterligare en barometersensor som förbättrar resultatet av positioneringen. I studien användes två MEMS barometrar som är kom-binerade med en temperatursensor var.
Den omgivande temperaturen avlästes varje 0,5 sekund medan samplingsfrekvensen för baro-metersensorn var ca 1,8 Hz då just denna barometer var begränsad till denna frekvens. Test-personen använde trappor eller hiss för att växla mellan olika våningsplan. Under hela varaktig-heten i sensormätningen hade testpersonen en barometer i sin ryggsäck, medan den andra barometersensorn på framsidan av kroppen, se Figur 3.5.
Figur 3.5. Hur sensorerna var placerade under experimentet
Startpositionen i mätningen var på våning tre. Genom att bestämma skillnaden mellan dessa två barometersignaler kunde man med hög noggrannhet veta vilket våning testpersonen be-fann sig på under mätningen, se Figur 3.6.
Figur 3.6. Mätresultat med barometern, siffrorna representerar olika våningar.
Denna studie påpekar de felkällor som påverkar noggrannheten av tröghetsnavigationssystem och kan erbjuda lösningar för att kompensera dem, men hur man löser detta framgår inte i stu-dien.
3.2.4 Studie 4 Kim et al.
I denna artikel utför man en liknande undersökning som i en annan studie [4] där man undersö-ker det går att bestämma positionen inne i en byggnad med en PDR teknik. Med PDR teknik kan man beräkna positionen med hjälp av data från accelerometer, barometer och gyroskop. Som det nämndes i tidigare artikel kan man uppskatta höjd genom att mäta ett absolut lufttryck i förhållande till havsytan. MEMS barometrar har använts främst som höjdmätare. Dock är det bra att givaren korrigeras för att förbättra noggrannheten. I denna studie nämns en korrekt-ionsfaktor för att förbättra MEMS barometersensorn. I artikeln nämns samma formel för luft-tryck och barometrisk höjd som är nämnd i vetenskapliga studien [2]:
( ( ) )
där h betyder höjden i meter, P aktuell lufttryck i millibar och P0 är lufttryck vid havsnivå.
Formeln för beräkning av h används i föreliggande examensarbete.
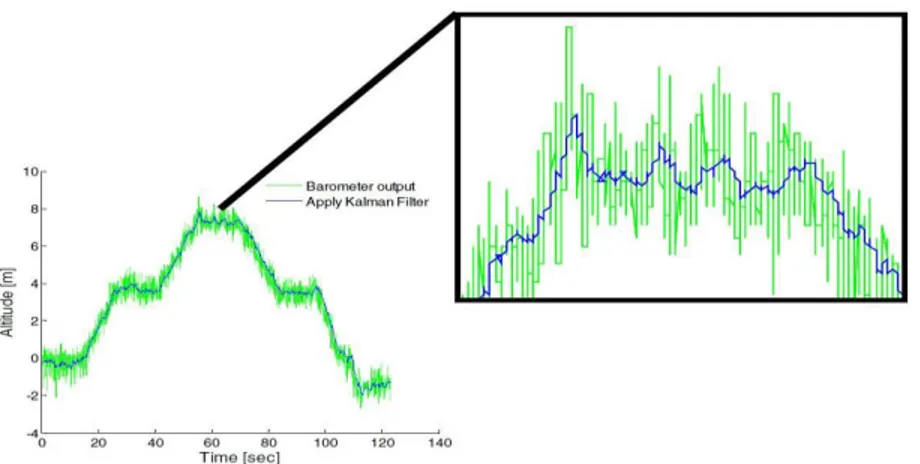
Havsnivåtryck varierar för olika dagar och för olika regioner främst beroende på hur värdet är utomhus, men med rätt uppskattning av P0 kan man få rätt höjdvärde. För att förbättra
baro-meter värden och snygga till kurvorna användes Kalman Filter. Implementering av Kalman Filter med barometer sensor har fördelen att lätt hitta de absoluta höjdvärdena.
Barometervärden kan variera mycket och felvärden (brus) kan påverka resultatet av utdata mycket, se Figur 3.7. När man jämförde mellan implementerad Kalman-filter och barometer data, så kunde Kalman-filtret förbättra prestandan på max 0,32 m. I slutsatsen kommer förfat-tarna fram till att det genomsnittliga standardfelet i höjduppskattning kunde med Kalman filter förbättras med max 0,15 m.
4. Teknisk bakgrund
4.1 Inledning
För att sampla värden i experimenten användes smarttelefonen LG Nexus 4 och applikationen AndroSensor. Med applikationen AndroSensor kan man välja vilka sensorer som skall samplas, det finns flera alternativ bl.a. att man kan välja önskad samplingsintervall. När man väljer att stoppa samplingen sparas all samplingsdata i en CSV fil.
För att kunna jämföra referenshöjden med barometersensorn användes en mätmetod som kal-las avvägning.
4.2 LG Nexus 4 E960
Nexus 4 är en Android smarttelefon där LG står bakom produktionen men den är designad av Google för att vara referensmodell för Android operativsystem. I examensarbetet användes Nexus 4 som mätinstrument, se Figur 4.1. Ett flertal andra Android smarttelefoner testades men det visade sig att prestandan på Nexus 4 var bättre pga. att den har en fyrkärnig processor, se Tabell 4.1. Detta medför att LG Nexus 4 kan sampla fler värden per sekund än de andra smarttelefonerna som testades i förundersökningen [6].
Tabell 4.1. LG Nexus 4 - tekniska specifikationer
4.3 Androidplattformen
Android är ett operativsystem som bygger på Linux-kärnan och Dalvik virtuell maskin som är anpassad för touch-enheter såsom smarttelefoner och tabletts. Linux kärnan är skriven i c/c++ men applikation till Android är skriven i programmeringsspråket java med egna bibliotek samt XML för att definiera utseende [7].
4.4 Sensorer
Smarttelefoner har MEMS-sensorer. MEMS är en akronym som står för Micro-Electro-Mechanical systems dvs. mikroelektromekaniska system. MEMS chip är vanligtvis gjorda av komponenter med storlek 0.02 mm till 1.0 mm och dessa sensorer består oftast av en central enhet som processerar data samt ett flertal komponenter som mäter utomstående påverkan på enheten [8]. Endast sensorerna som är relevanta till examensarbetet är beskrivna.
Dimensioner 133,9 x 68,7 x 9,1 mm
Vikt 139 g
Plattform Android OS, v4.2(Jelly Bean)
Frekvensband 2G Network GSM 850/ 900 / 1800 / 1900 3G Network HSPDPA 850/ 900 / 1700 / 1900 /
CPU Qualcomm Snapdragon S4 Pro APQ8064
Minne 16 GB internminne, 2 GB ram minne
Anslutningar Wlan Wi-fi 802.11a/ b / g / n, dualband, DLNA, Wi-Fi hotspots Bluetooth, MicroUSB
Sensorer Accelerometer, Gyroskop, Magnetometer, Ljussensor, Barometer, GPS, Mikrofon
4.4.1 Accelerometer
Accelerometer är en sensor som kan mäta hastighetsförändringar dvs acceleration. När acce-lerometern är i vila ska den indikera värdet 1 g neråt p.g.a. av jordens gravitation [9]. På Nexus 4 finns en accelerometer/gyroskop MEMS-enhet som kombinerar tre axel accelerometer och en tre axel gyroskop. Accelerometer används oftast för att bestämma om bilden på smarttelefoner ska vara i porträtt- eller landskapsläge men kan också användas till att mäta steg m.m. Spän-ningen från accelerometern digitaliseras med hjälp av en 16-bitars analog till digital omvandlare (ADC) [10].
4.4.2 Barometer
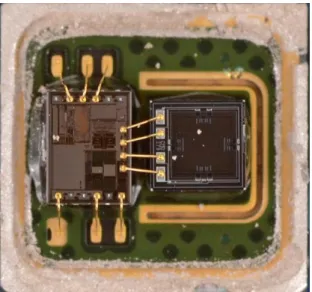
MEMS-Barometern som finns i LG Nexus 4 tillverkas av Bosch, se Figur 4.2. Den har låg ström-förbrukning och hög prestanda vilket gör att den kan användas i avancerade mobila enheter såsom smarta telefoner, pekdatorer och sportutrustning [11]. Barometriska höjdmätare mäter lufttryck där den lokala havsytan används som referens. Trycket varierar lokalt beroende på väderförhållanden.
4.4.3 GPS-funktion
I Nexus 4 finns en inbyggd GPS som kan användas för att mäta geografiska koordinater dvs. lati-tud och longilati-tud värden. GPS-sensorn har även höjdberäkning kallad för altilati-tud.
4.5 AndroSensor
AndroSensor är ett diagnostiskt sensorverktyg som kan läsa av Android-enhetens olika senso-rer. AndroSensor stödjer en mängd olika sensorer i Android-enheter, den har även en funktion som kan visa vilka sensorer som inte stöds. Det går att läsa av enhetens sensorer grafiskt i real-tid och även skapa en textproducerad fil med sensorernas värde som sparas, se Figur 4.3. Sen-sorvärden sparas i en CSV fil, i CSV filen finns möjligheten att välja om data skall sparas i rader eller kolumner 4.5. Realtidsgrafen är inte tillgänglig för plats (GPS), närhet (Proximity) och bat-teri information [12].
Figur 4.3. Skärmbild applikationen AndroSensor kan se ut om man väljer realtidsgraf.
Samplingsintervallen på applikationen AndroSensor2 kan ställas in som snabbast med på 50 ms och som lägsta på 120 sekunder, se Figur 4.4.
2
Applikationen som användes uppdaterades den 10 mars 2013, aktuell AndroSensor version: 1.9.4.4a och minimumkrav Android Version 1.6 eller senare.
Figur 4.4. Val av Samplingsintervall i AndroSensor
4.6 Avvägningsinstrument
För att få fram bra höjdprecision mellan havsnivå och en eller flera utvalda mätpunkter använ-des en mätmetod som kallas för avvägning. Denna mätmetod går ut på att man använder ett avvägningsinstrument, det behövs även en graderad avvägningsstång.
4.7 Data från smarttelefon
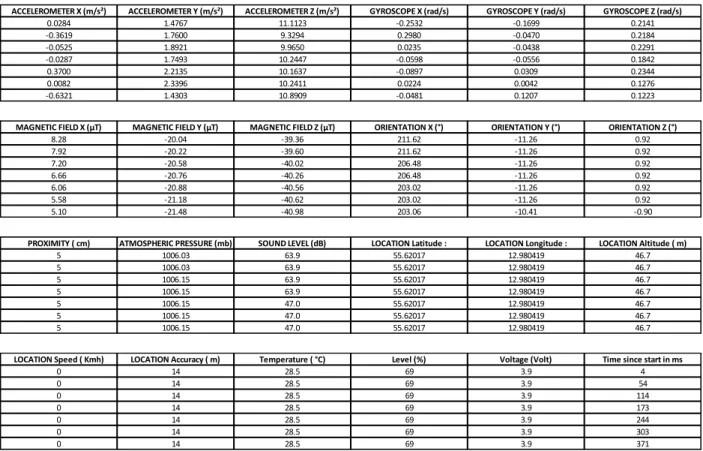
När man genomför sensormätningar med applikationen AndroSensor skapas en CSV fil i smart-telefonen som kan överföras med olika metoder till en dator. Genom att öppna CSV filen i Wordpad som enbart text separeras först titlarna med semikolon. Eftersom titlarna innehåller text betraktas de som strängar och alla sensorvärden betraktas med siffror i titelordning. Öpp-nar man CSV filen i kalkylprogrammet Excel ser det annorlunda ut, se Figur 4.5.
Figur 4.5. Sensor information i CSV filen när man öppnar den i kalkylprogrammet Excel.
ACCELEROMETER X (m/s²) ACCELEROMETER Y (m/s²) ACCELEROMETER Z (m/s²) GYROSCOPE X (rad/s) GYROSCOPE Y (rad/s) GYROSCOPE Z (rad/s)
0.0284 1.4767 11.1123 -0.2532 -0.1699 0.2141 -0.3619 1.7600 9.3294 0.2980 -0.0470 0.2184 -0.0525 1.8921 9.9650 0.0235 -0.0438 0.2291 -0.0287 1.7493 10.2447 -0.0598 -0.0556 0.1842 0.3700 2.2135 10.1637 -0.0897 0.0309 0.2344 0.0082 2.3396 10.2411 0.0224 0.0042 0.1276 -0.6321 1.4303 10.8909 -0.0481 0.1207 0.1223
MAGNETIC FIELD X (μT) MAGNETIC FIELD Y (μT) MAGNETIC FIELD Z (μT) ORIENTATION X (°) ORIENTATION Y (°) ORIENTATION Z (°)
8.28 -20.04 -39.36 211.62 -11.26 0.92 7.92 -20.22 -39.60 211.62 -11.26 0.92 7.20 -20.58 -40.02 206.48 -11.26 0.92 6.66 -20.76 -40.26 206.48 -11.26 0.92 6.06 -20.88 -40.56 203.02 -11.26 0.92 5.58 -21.18 -40.62 203.02 -11.26 0.92 5.10 -21.48 -40.98 203.06 -10.41 -0.90
PROXIMITY ( cm) ATMOSPHERIC PRESSURE (mb) SOUND LEVEL (dB) LOCATION Latitude : LOCATION Longitude : LOCATION Altitude ( m)
5 1006.03 63.9 55.62017 12.980419 46.7 5 1006.03 63.9 55.62017 12.980419 46.7 5 1006.15 63.9 55.62017 12.980419 46.7 5 1006.15 63.9 55.62017 12.980419 46.7 5 1006.15 47.0 55.62017 12.980419 46.7 5 1006.15 47.0 55.62017 12.980419 46.7 5 1006.15 47.0 55.62017 12.980419 46.7
LOCATION Speed ( Kmh) LOCATION Accuracy ( m) Temperature ( °C) Level (%) Voltage (Volt) Time since start in ms
0 14 28.5 69 3.9 4 0 14 28.5 69 3.9 54 0 14 28.5 69 3.9 114 0 14 28.5 69 3.9 173 0 14 28.5 69 3.9 244 0 14 28.5 69 3.9 303 0 14 28.5 69 3.9 371
5 Mätsträckan för applikation enligt Scenario 1
5.1 Inledning
Anledningen till redovisade mätningar i detta kapitel är att man skulle undersöka möjligheter till att komplettera statistiken för en person som är ute och löper när denne samtidigt använder en finess applikation på mobilen, som till exempel Runkeeper eller Endomondo.
Det finns två problem med GPS-mätningarna, det ena är Latitud/Longitud noggrannhet och det andra är höjd (altitude) noggrannhet. Den empiriska undersökningen studerades in med möj-lighet att förbättra höjdnoggrannhet med hjälp av barometersensor. För att ta reda på hur på-litlig barometersensor i en smarttelefon är utfördes flera experiment för att sedan jämföras med varandra. En mätsträcka som har tillräckliga höjdskillnader valdes. Detta för att undersöka barometerns förmåga att avläsa lufttryck på olika höjder och därmed kunna använda dessa uppmäta värden för att beräkna höjden under sträckan
Med avvägningsmetoden kan man erhålla en bra höjduppskattning för varje placerad punkt på kartan. Under utförd mätning samplades in olika värden med Android applikationen AndroSen-sor i en CSV fil. Bl.a. samplades smarttelefonens positionering av Longitud, Latitud och barome-tervärden.
5.2 Val och kalibrering av mätområdet
5.2.1 Mätområdet
Optimalt skulle mätsträckan vara kort d.v.s. inte större än 500 m för att tidsmässigt ge möjlighet att utföra flera experiment istället för ett fåtal tidskrävande experiment. Av denna anledning valdes en plats på Västra Hamnen nära Fakulteten teknik och samhälle vid Malmö högskola som hade flera upp och ner kullar, se Figur 5.1. På denna mätsträcka bestämdes en startpunkt och en slutpunkt samt milstolpar mellan dessa, för att medföra relevanta mätningar, se Figur 5.2.
Figur 5.2. Startpunkt och slutpunkt.
Sträckan användes vid experiment under olika tidpunkter på dagen samt under olika dagar för att mätdata skulle kunna mätas i varierande väderförhållande. Sträckan samplades med samt-liga sensorerna påslagna samtidigt och smarttelefonen var placerad i olika lägen för hälften av mätningarna. Vid de första tre mätningarna var smarttelefonen placerad i vänster byxficka me-dan de tre sista mätningarna var smarttelefonen placerad i handen med skärmen vänd uppåt. Milstolparna valdes genom att välja geografiska koordinater från Malmö Stads koordinat och höjdsystem [13] samt höjderna på sträcka mättes fram med ett avvägningsinstrument, se av-snitt 5.2.2.
Då det saknades markerings-redskap användes vanliga stenar som fanns vid havet. Varje mät-punkt markerades med två stenar och avvägnings mät-punkt markerades med en krita.
5.2.2 Mätning av höjdskillnader
För att få fram en bra mätning på höjderna över havsnivå på varje mätpunkt användes avväg-ningsmätningarna. Genom att placera avvägningsinstrumentet på marken med en vinkel på 90 grader ser man till att avvägningsinstrumentet ligger vågrätt, se Figur 5.3. Då får man fram bra precision på mätvärden om man avläser avvägningsstången korrekt. Man placerar avvägnings-instrumentet mellan två mätpunkter och avläser deras höjd. För att få fram höjdskillnaden mel-lan två punkter summeras de avlästa värden. Genom att repetera denna procedur får man fram höjdskillnader mellan bestämda mätpunkter och då kan en höjdkarta skapas över den upp-mätta sträckan.
Figur 5.3. Hur än mätningen med avvägningsinstrument kan se ut i backen
Genom att titta igenom en kikare på avvägningsinstrumentet kan man läsa av värden på avväg-ningsstången. I vårt fall valdes havet som första punkt för att man ville få reda höjdskillnad mel-lan markpmel-lan och havsnivå. Eftersom geografiska koordinater är tilldelade på varje mätpunkt som har satts ut på kartan, se Figur 5.2 samt att det finns mätresultat från avvägningsinstru-mentet på varje mätpunkt, kan man tilldela en någorlunda bra höjdmätning till varje mätpunkt, se Tabell 5.1. På så sätt vet man med någorlunda bra precision vilken höjd över havsnivå mät-punkterna ligger på. Data kan jämföras med barometervärden som beräknats till meter genom en matematisk höjdformel så att dess tillförlitlighet kan avgöras, se höjd formel i avsnitt 3.
Tabell 5.1. Avstånd mellan mätpunkter
Mätpunkt Avstånd till nästa punkt
1 Mätpunkt 0 Avvägningsinstrument 11,3 2 Mätpunkt 8 Avvägningsinstrument 10 3 Mätpunkt 8,4 Avvägningsinstrument 14,8 4 Mätpunkt 9,9 Avvägningsinstrument 10,4 5 Mätpunkt 38,4 Avvägningsinstrument 12 6 Mätpunkt 13,7 Avvägningsinstrument 11,5 7 Mätpunkt 16,9 Avvägningsinstrument 14,2 8 Mätpunkt 6,7 Avvägningsinstrument 7,9 9 Mätpunkt 7,9 Avvägningsinstrument 4,5 10 Mätpunkt 14,6
Med olika mätpunkter placerade på kartan ritade vi fram en mätsträcka som sedan följdes när mätningarna utfördes. Först bestämdes mättningspunkter på ett specifikt område vid Västra Hamnen. Sedan mättes punkternas höjdskillnad med ett avvägningsinstrument, Tabell 5.2. En karta ritades med ett bildbehandlingsprogram tillsammans med alla mätpunkter, se Figur 5.2. Under mätningarna användes tidtagning.
Tabell 5.2. mätpunkternas höjd
5.2.3 Mätning med Runkeeper
Figur 5.4. Utseende på runkeeper-användarkonto med loggad löpningsinformation
Så här kan en skärmbild se ut på applikationen Runkeeper. Data sparas på ett användarkonto när användaren är inloggad och samtidigt utför löpning utomhus när applikationen är igång, se Figur 5.4 Runkeeper har en “TOTAL CLIMB” statistik, där höjdskillnad under löprundan present-eras. Problemet är att GPS-höjdfunktionen visar felaktig data, observera att Runkeeper visar fel höjd, se Figur 5.5. Den verkliga höjdändringen är från 0 till 10 m, se Tabell 5.2.
Mätpunkt Höjd (m) 1 0,0 2 2,7 3 4,8 4 7,9 5 10,1 6 8,9 7 7,0 8 8,4 9 4,9 10 3,8
Med hjälp av barometer-sensorn kan man förbättra höjdinformation och förbättra statistiken för användaren. Barometersensorn är en ganska ny sensor i smarttelefoner, därav finns det ett stort intresse av att undersöka möjligheterna.
Figur 5.5. ”Total climb” funktionen visar fel i höjd på RunKeeper-applikationen
5.2.4 Bestämning av Longitud/Latitud- koordinater
För att pricka in koordinater på kartan användes Malmö stads hemsida [13]. Där kan man pricka in koordinater på en karta över Malmö eller beställa utspridda höjd fix-punkter där man får reda på höjden. I Figur 5.6. visar den röda pricken hur information om Longitud och Latitud pre-senteras när en punkt är vald.
Tabell 5.3. Uppmätta koordinater på mätsträckan
Tabell 5.3 är varje mätpunkts koordinater. Som kontroll av noggrannhet plottades Tabell 5.3 med Matlab, se Figur 5.7.
Figur 5.7. Mätsträckan ritad från de uppmätta geografiska koordinaterna.
Punkt Longitude Latitude
1 12,98025 55,62021 Avvägningsinstrument 12,98028 55,62011 2 12,98031 55,62004 Avvägningsinstrument 12,98032 55,61995 3 12,98024 55,61989 Avvägningsinstrument 12,98004 55,61982 4 12,97991 55,61977 Avvägningsinstrument 12,97976 55,61973 5 12,97921 55,61958 Avvägningsinstrument 12,97904 55,61953 6 12,97885 55,61947 Avvägningsinstrument 12,97869 55,61942 7 12,97855 55,61929 Avvägningsinstrument 12,97839 55,61920 8 12,97829 55,61918 Avvägningsinstrument 12,97827 55,61925 9 12,97825 55,61932 Avvägningsinstrument 12,97824 55,61936 10 12,97821 55,61945
5.2.5 Beräkning av avstånd mellan GPS punkter
För att beräkna avstånd mellan två GPS-koordinater användes haversine formeln. Haversine formeln är en viktig formel inom navigation och anger avståndet mellan två punkter på en sfär. Jordens omkrets skiljer sig beroende på var på jorden man befinner sig. Vid ekvatorn är radien 6378,1370 km medan den är 6356,7523 km vid polerna. I undersökningen användes dock ett värde på 6371 km vilket är Jordens volymetriska radie [14]. Sfären har en stor betydelse vid långa sträckor, då denna studie har enbart korta sträckor blir felmarginalen väldigt låg vilket är acceptabelt för arbetets ändamål:
(√ ( ) ( ) ( ) ( ))
I formeln ovan [15] är avstånd betecknad med bokstaven d (från engelska distance) och r är beteckningen för radie. Förkortningarna lat1, lat2 är för föregående och nuvarande latitud och long1, long2 är förkortningar för föregående och nuvarande longitud i denna formel. Latituden och longituden är angivna i radianer i denna formel. Tabell 5.4 visar resultatet i meter.
Tabell 5.4. Avstånd mellan mätpunkterna
För att få fram sträckans totala längd summeras alla avstånd mellan punkterna. Sammanlagda avståndet av sträckan är 220,9 m i en riktning, vilket innebär att 441,8 m är den totala sträckan för vandringen under experimentet.
Mätpunkt Referensavstånd(m) 1 0,0 2 19,3 3 17,2 4 24,6 5 48,8 6 25,7 7 27,5 8 20,4 9 15,8 10 14,7
6. Experiment med barometer i mätområdet
6.1 Inledning
För att kunna bestämma om sensorerna var pålitliga genomfördes flera mätningar under olika förhållanden, olika dagar och olika tidpunkter. Då atmosfärtrycket skiftar under olika dagar kan man jämföra samplade data för att definiera om sensorerna avger användbar samplingsdata. Sex stycken mätningar utfördes genom att sampla data med smarttelefonen från en startpunkt nära havsnivå för att sedan promenera längst den förutbestämda sträckan. I mätningarna ett till tre var smarttelefon placerad i byxfickan och i mätningarna fyra till sex var smarttelefonen placerad i handen. Anledningen till detta var för att bestämma om placeringen på smarttelefo-nen har någon påverkan på mätningarna.
6.3.1 Jämförelse mellan samplad och uppmätt data
Empirisk data samlades in för analys, i Figur 6.1 visas den uppmätta referenshöjden från avväg-ningsmätningen. Höjden från barometerdata beräknades med höjdformel 1 i avsnitt 3. I grafen kan man se att höjden för mätpunkter från barometern inte är likadan som den uppmätta refe-renshöjden. Den beräknade höjden från barometerdata hade en felmarginal som högst på ca 2 m vilket är nära den uppmätta referenshöjden. Observera att andra halvan av grafen är en spe-gelbild av den första. Detta beror på att halva promenaden för experimentet började från punkt 1 och slutade på punkt 10, för att sedan fortsätta resterande promenadväg tillbaka från punkt 11 till punkt 20.
GPS i en smarttelefon kan räkna höjden över havsnivå genom information från satelliter. Höjd-information har sämre kvalitet än longitud/latitud och visar felaktiga värden på sträckan. Detta var förväntat då barometern har en bättre höjdprecision än GPS, [2],[3]. I graferna i Figur 6.2 kan man se att den samplade GPS-höjden är ca 40 m högre än den uppmätta referenshöjden och då kan det konstateras att höjdmätningen inte är pålitlig utan att det krävs korrigering med hjälp av barometerdata.
Figur 6.2. Referenshöjd kontra GPS-höjd.
Då startpunkten av höjden är nära 0 m över havet går det att korrigera höjden på GPS-värdet med -46,7 m som var startvärde vid GPS-höjdmätningen. Detta värde användes för att få fram en höjd på 0 m över havet i startpunkten. När man använder samma korrigeringsvärde på res-terande GPS-höjder, se Figur 6.3, kan man konstatera att även om 46,7 m korrigeras bort blir GPS-höjden fortfarande felaktig jämfört med referenshöjden.
Jämförelse mellan uppmätta barometervärden
I Figur 6.4 plottas atmosfärtrycket med tiden för mätningarna ett och fyra, där mätning ett visas på den vänstra grafen och mätning fyra på den högra grafen. Mätning fyra stämmer någorlunda bra med de uppmätta referensvärdena, mätning fyra visar även bättre resultat jämfört med data från mätning ett. Detta beror förmodligen på smarttelefonens placering, i mätning ett där den var placerad i byxfickan uppstår troligtvis mer brus och störningar på barometersensorn. Medan i mätning fyra var smarttelefonen placerad i handen och störningarna på barometersen-sorn var betydligt mindre.
Figur 6.4. Jämförelse mellan mätning ett och mätning fyra.
Genom att analysera mätning ett och fyra kan vi konstatera att placeringen av smarttelefonen har en stor påverkan på data, men för att vara säkra att detta inte var en slump jämförs mät-ning två och fem. I mätmät-ning två där smarttelefonen var placerad i fickan blev störmät-ningarna mer. I mätning fem kunde vi konstatera att data troligtvis innehöll mindre brus då smarttelefonen var placerad i handen.
I de sista mätningarna var resultaten nästan identiska som övriga Västra Hamnen mätningar. Med denna jämförelse kan vi konstatera att placeringen av smarttelefonen påverkar resultaten i analysen. Resultaten visar att det finns mer störningar när smarttelefonen har placerats i fick-an vilket förmodligen beror på att atmosfärtrycket påverkas av rörelsen från benen.
7. Barometer och accelerometer experiment enligt scenario 2
7.1 Inledning
I vetenskapliga artikeln [5] undersöktes barometern genom att sampla data medan en testper-son rörde sig mellan olika våningar med trappor, inomhus. För att undersöka barometern på smarttelefonen återskapades samma experiment på Malmö Högskola.
7.2 Kranen
I Kranen på Malmö högskola, Fakulteten för Teknik och Samhälle (TS), utfördes ett experiment där en testperson gick ner och upp genom 5 våningar. Testpersonen höll smarttelefonen i han-den. Figur 7.1. visar resultatet från en trappmätning på Malmö högskola, barometervärden har beräknats från millibar till meter.
Figur 7.1. Graf från en trappmätning på Malmö högskola.
På varje våning gjordes fem sekunders uppehåll för att barometern skulle få tid att sampla ak-tuella våningen. I Figur 7.1 går det med tydlighet avläsa att barometern avger ett lägre atmo-sfärtrycks i början och stadigt ökar med rörelse från våning till våning. Man kan tydligt avläsa varje våning som testpersonen promenerade uppifrån och nedåt med mindre brus. Däremot är det något mindre tydligt att avläsa när testpersonen promenerade nerifrån och uppåt. Detta kan bero på flera anledningar. Människor som öppnade dörrar är exempel som kan ha orsakat felaktiga värden. I kontentan är det möjligt att avläsa vilken våning en smarttelefon befinner sig på om man vet dess högsta barometertryck.
7.3 Turning Torso scenario 2 och scenario 3
7.3.1 Inledning
Turning Torso [16] är Nordens högsta byggnad, byggnaden är ca 190,4 m hög och den har, se Figur 7.2. På grund av säkerhetsregler i Turning Torso utfördes endast två experiment i byggna-den på grund av att tillgängligheten är begränsad och endast boende samt personal har till-träde.
Figur 7.2. Turning Torso.
7.3.2 Undersökning av mätningar med barometern scenario 2
Under mätningen åkte testpersonerna till olika våningar med ca 14 sekunders uppehåll på varje våning. Tabell 7.1 beskriver ordningen på hissfärden.
Figur 7.3 är en graf från en mätning på Turning Torso, den visar det samplade lufttrycket i Y-axeln under färden. X-axel visar tiden i millisekunder. Experimentet tog ca 230 sekunder.
Figur 7.3. Filtrerad kontra icke filtrerad barometertryckdata från Turning Torso mätning två.
Lufttrycket på våning 52 var ca 988,3 mb och högsta lufttrycket P0 på bottenvåningen var ca 1
008,2 mb. För att beräkna höjden med dessa barometervärden används formel 1 från avsnitt 3, se följande formel: ( ( ) )
Grafen omvandlades från mb till meter så att den gick avläsas som höjdinformation, se Figur 7.4.
Figur 7.4. Beräknad höjd från Turning Torso färd två.
7.3.3 Analys av accelerometerdata i Turning Torso färdberäkning scenario 3
Smarttelefonen placerades i horisontellt läge på en kudde (för att minska störningar) på golvet i hissen. För att minimera brus användes även en metod som förenklar hanteringen av tredi-mensionella accelerometerdata. Förenklingen sker genom att man summerar absolutbeloppet för varje axel och drar roten ur summan av alla axlar. Det innebär att man får ut en positiv vek-tor, metoden kallas för SVM (Signal Vector Magnitude) [17] även kallat för RSS (Root Square Sum), se formel:
√
Det finns olika metoder för att beräkna hur långt man har färdats med accelerometerdata. Rek-tangelmetoden [18] valdes för att det är det enklaste sättet att uppskatta numerisk integration. Principen för beräkning av färden är följande. Vi refererar till Tabell 7.2, som innehåller några enkla siffervärden för att underlätta beskrivningen.
Smarttelefonen samplade användbar accelerationsdata från den summerade vektorn, i diskreta tidsögonblick 0, 1, 2, 3... i tabellen visar tidpunkten för samplingen med start i vid . är differens mellan samplingsögonblick (skillnaden i tiden mellan succesiva mätningarna). är uppmätta accelerometervärden från vilka vi subtraherar jordens gravitation så att i viloläge är = 0.
Vi utnyttjar dessa värden för att beräkna hastigheten i successiva tidpunkter. I tidpunkten n = 0 är hastigheten 0 och acceleration är [ ] . Detta betyder att i har vi has-tighet [ ] [ ] [ ] ( ). Vid är hashas-tigheten summan av [ ] och [ ] [ ] ( ). Den allmänna formeln är:
[ ]
[ ] [ ] [ ] [ ]
Efter beräkningen av hastigheten i början av varje intervall kan vi räkna avverkat avstånd i in-tervallet.
Vid är [ ] . Den första hastigheten som vi beräknade är [ ] och gäller intervallet . Det betyder att [ ] och [ ] [ ] [ ] m
Sträckan växer och därför:
[ ] [ ] [ ] [ ] m Den allmänna formeln är då:
[ ] [ ]
[ ] [ ] [ ] [ ]
Tabell 7.2. Ett exempel av hur man kan räkna fram hur långt man har färdats i tiden.
n a (m/^2) t (ms) Dt(s) v (m/s) s (m) ( t[n]-t[n-l] ) /1000 v[n] = v[n-l] + a[n-l]*Dt[n] s[n] = s[n-l] + v[n-l]*Dt[n] 0 10,90 144567 0 0 0 1 10,85 144639 0,07 0,78 0 2 10,82 144733 0,09 1,80 0,07 3 10,83 144783 0,05 2,35 0,16 4 10,84 144833 0,05 2,89 0,28 5 10,88 144883 0,05 3,43 0,43 6 10,90 144952 0,07 4,18 0,66 7 10,90 145010 0,06 4,81 0,90 8 10,89 145117 0,11 5,98 1,42 9 10,84 145170 0,05 6,56 1,74
För att sammanfatta, vid beräkningen genomför vi två integreringar, en för att beräkna hastig-heten och en för att beräkna sträckan:
1) Vi mäter och . 2) från t räknar vi fram
3) Vi använder i början av ett intervall tillsammans med längden av intervallet för att räkna i den kommande intervall som är summa av hastigheten i början på intervallet adderad med den ”nya” hastigheten (observera att hastigheten kan öka eller minska be-roende om är positiv eller negativ).
4) Vi använder hastighet i i början på intervallet tillsammans med längden av intervallet för att beräkna sträckan ( ) i intervallet och addera denna till sträckan hittills.
5) Vi upprepar iteration.
Man kan förbättra beräkningarna genom att filtrera uppmätta accelerations-värden med ett 2 stegs genomsnittsvärde vid varje punkt, denna matematiska metod kallas för trapetsregeln [18
].
Följande exempel visar hur man kan räkna två stegs medelvärde:[ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]
osv
I vår praktiska situation med mätningar från Turning Torso visade det sig att medelvärde och nollfas digital filtrering hade minimal påverkan på resultatet. Vi valde att utföra en numerisk integration av accelerometerdata på två utvalda situationer från mätning 2 på Turning Torso, vi förklarar mer i slutsatsen. De två röda markeringarna indikerar vilka utvalda situationer vi un-dersökte närmare på, se Figur 7.5. Resultatet varierar och alla presenterade värden är ungefär-liga.
Figur 7.5. Utvalt accelerometerdata från mätning 2 i turning torso.
I den första utvalda situationen befann sig hissen först i vila på våning 52 i ca 9 sekunder, acce-lerationen var noll om man antar att viloläge för denna accelerometersituation var ca 10,24 m/s2, se Figur 7.6. Hissen började sedan färdas i negativ riktning. Accelerationen ökade i ca 9 sekunder, då hann hissen färdas ca 24 m. Hissen färdades med en konstant hastighet på ca 5,2 m/s under ca 24 sekunder, då hann hissen färdas ca 125 m. Hissen började bromsa in och acce-lererade i positiv riktning under ca 8 sekunder, hissen hann då färdas ca 21 m.
Figur 7.6. Hastighet beräknad utvald färd våning 52-0 med hjälp av numerisk integration.
När hissen befann sig på våning 0 hade färden varat i ca 41 sekunder och totalt hann hissen färdas ca 169,9 m i negativ riktning, se Figur 7.7.
I den andra utvalda situationen befann sig hissen först i vila på våning 0 i ca 10 sekunder, acce-lerationen var noll om man antar att viloläge för denna accelerometer var ca 10,24 m/s2, se Figur 7.8. Hissen började sedan färdas i positiv riktning. Accelerationen ökade i ca 9 sekunder, då hann hissen färdas ca 24 m. Hissen färdades med en konstant hastighet på ca 5,3 m/s under 23 sekunder, hissen hann då färdas ca 123 m. Hissen började bromsa in och accelererade i ne-gativ riktning under ca 9 sekunder, den hann då färdas ca 26 m.
Figur 7.8. Hastighet beräknad utvald färd våning 0-52 med hjälp av numerisk integration.
När hissen befann sig på våning 52 hade färden varat i ca 41 sekunder och totalt hann hissen färdas ca 173 m i positiv riktning, se Figur 7.9.
Figur 7.9. Accelerometer beräknad utvald färd våning 0-52 med hjälp av numerisk integration.
8. Diskussioner och slutsatser
8.1 Diskussion
8.1.1 Barometer
Examensarbetet gick huvudsakligen ut på att utföra specifika mätningar. Mätningarna under-söktes därefter för att se möjligheter att implementera funktionerna i verkliga livet, d.v.s. någonting som förenklar människans vardag. I samtliga vetenskapliga artiklar [2], [3], [4], [5] diskuterades att en kombinerad barometersensor med temperaturavläsning förbättrade resul-tatet i barometertryckmätningarna. I en utomhusmätning [2] skulle det med den kombinerade barometersensorn vara möjligt att se en tryckskillnad mellan vad som är inomhus respektive utomhus, vilket delvis orsakas av temperaturskillnader. I allmänhet ger ventilationssystem en konstant temperatur inomhus. Principiellt är det nödvändigt med en referensbarometer inom-hus för att få bra mätresultat. Omgivande lufttryck som mäts med barometersensorn påverkas av förändringar i omgivande temperatur [2]. Under studien tog vi hänsyn till en tillfällighet, att en öppen dörr kan framkalla höjdfel på meternivå. Detta observerades i vår trappmätning, se avsnitt 7.2. Svaga temperaturskillnader i rummet som kan ha orsakats av ett litet luftdrag när dörrar öppnades under trappmättning. Utöver temperaturskillnader påverkades luftflödet av att dörren svängde, vilket ledde till att tryckmätningen visar fel.
8.1.2 GPS
GPS-positionering kan variera beroende på antal in fångade satellitsignaler. I mätningarna för studien varierade dessa mellan ca 18 till ca 24 in fångade satellitsignaler. Logiskt borde vara att fler infångade satellitsignaler ger ett säkrare resultat. Det observerades att antal in fångade GPS-satelliter varierade vid mätningarna och därmed var GPS-signalen inte fullt pålitlig i precis-ion.
8.1.3 Accelerometer
I samtliga vetenskapliga artiklar har man kommit fram till att med hjälp av accelerometer har man kunnat beräkna steg och vertikal hastighet. I en av artiklarna [5] diskuteras PDR system, en positionerings teknik för att kunna uppskatta hur en person förflyttar sig inomhus med hjälp av steglängd. För att PDR teknik skall ge bra precision behövs exakta accelerationer, en hiss som accelererar mekaniskt skulle liknas vid denna undersökning i artikeln. Vi implementerade en numerisk integration i två utvalda situationer av accelerometerdata från Turning Torso. Syftet med beräkningarna var inte att få fram de exakta värdena utan att visa att principen fungerar. Det svåraste momentet var att bestämma tidpunkterna för data som användes vid beräkning-arna. I accelerometerdata markerar varje punkt en övergång från ett tillstånd till ett annat vilket försvårar att bestämma korrekt hastighet i närvaro av brus.
8.1.4. AndroSensor
Efter utförda experiment med AndroSensor upptäcktes att samplingsintervall inte är konstant utan varierar med några millisekunder beroende på hur många sensorer som är aktiverade samtidigt under samplingsintervallet. I en smarttelefon med kraftigare processor blir tidsskillnaderna mellan samplingarna mindre än i en smarttelefon som har en svagare processor. Detta har en påverkan på samplingsdatan då en kraftfullare processor ger bättre samplingsintervall vilket leder till att man får mer information.
8.2 Slutsatser
I samtliga vetenskapliga artiklar implementerade man Kalman filter. Fördelen med implemente-ring av Kalman filter i samband med barometerdata är att det förenklar att hitta de absoluta höjdvärdena. I slutsatsen kunde samtliga författare konstatera att det genomsnittliga standard-felet i höjduppskattning kunde förbättras med max 0,15 m när de implementerade Kalman ter. För vår mätning instuderades en typ av filtrering som kallas för filtfilt. Filtfilt ett inbyggt fil-ter i Matlab och är en nollfas digitalfiltrering som filtrerar värden i både fram- och bakåtrikt-ning. [19].
Nollfas digitalfiltreringen visade sig inte göra någon större förbättring på barometerdata. Vid mätning av lufttrycket spelar varierande avstånd mellan mätningarna inte särskild stor roll ef-tersom lufttrycket varierar relativt lite. Det nämns i samtliga vetenskapliga artiklar att en stabil
omgivningstemperatur såväl som en måttlig ventilation ger bättre barometertryckresultat. Även dessa författare nämner att datautjämning (filtrering) inte förändrar resultatet i grafen när det gäller barometerdata. Det skulle eventuellt vara möjligt att filtrera grafen med en bättre och smartare filtreringsalgoritm som t.ex. Kalman filtrering, vilket inte hade varit möjligt tids-mässigt inom examensarbetes ramar. Däremot kan man konstatera att nollfas digitalfiltrering av accelerometerdata ger en synbar förbättring. Anledningen till att detta är att accelerometer-datan har en större förändring i tiden än barometerdata.
Av Turning Torsos officiella hemsida [16] framgår inte höjden av varje våning, men på hemsidan Emporis.com [20] finns en teknisk specifikation över Turning Torso. Där finns det uppgifter om att varje våning har en höjd på ca 3,18 m. Under Turning Torso-experimentet åkte vi upp till våning 52. Eftersom bottenvåningen på Turning Torso börjar från noll multiplicerar vi 3,18 med 52 och får 165,4 m. Barometermätning att våning 52 befinner sig på höjden 168,4 meter. Den beräknade höjden skiljer sig med ca 3 m från referenshöjden, vilket är en ganska bra mätprecis-ion, men exakta höjden för våning 52 på Turning torso är fortfarande okänd. Experimenten från Turning Torso visar att vid en snabb förändring i atmosfärtrycket ser det ut som om bruset är mindre, eftersom det inte går att uppfatta om det är brus man samplat. I en sådan situation ser Turning Torsos barometerdata ut att ha någorlunda bättre resultat än vandringsmätningarna. Mätningarna från Västra Hamnen visar att placeringen av smarttelefonen är viktig för minime-ring av brus. Detta kan konstateras då resultatet från mätningarna tydligt visar att när smartte-lefonen var placerad i byxfickan hade barometerdata mer brus jämfört med när smarttesmartte-lefonen var placerad i handen. Anledningen till detta är förmodligen pga. att när smarttelefonen är pla-cerad i fickan påverkas barometersensorn av rörelse, fukt- och temperaturförändringar. Dock att tilläga är, att vi inte är helt säkra på dessa påståenden eftersom det krävs flera tester för att sådana slutsatser skall vara mer pålitliga.
När vi implementerade en numerisk integration i två utvalda situationer av accelerometerdata från Turning Torso kunde det konstanteras att man hade färdats ca 169,9 m i negativ riktning (våning 52-0) och ca 173 m i positiv riktning (våning 0-52). Detta är ganska nära barometerns höjdberäkning som är på 168,4 m. Detta bevisar att man med hjälp av numerisk integration kan beräkna ungefär hur långt man har färdats med en hiss, dock lyckades vi inte utföra en nume-risk integration på den totala under Turning Torso färden. Problemet var att g värdet varierade när hissen stod i vila på olika våningar samt när hissen hade konstant hastighet. Vi kunde inte komma fram till någon vettig förklaring varför g värdet varierade när hissen var i vila eller fär-dades med en konstant hastighet. Vi kan dra slutsatsen att g värdet troligtvis skiljer sig från verkligheten då accelerometersensorer som finns i smarttelefoner är inte är helt pålitliga. G värdet måste tas i beaktning och studeras in för framtida studier av detta examensarbete. När vi utförde GPS-mätningar använde vi oss av Malmö stads kartsystem som referens. Det gjordes en sammanställning av samplade GPS-koordinater från smarttelefonen, se Figur 8.1.
Figur 8.1. Vandringssträckan: A-referensmätning av koordinater, B-GPS koordinater fram, C-GPS koordinater tillbaka.
Genom att jämföra grafer från referensmätningen och våra GPS-mätningar går det att utläsa hur de uppmätta koordinaterna visar en liknande sträcka med en liten felmarginal. Detta beror på att GPS-signalen inte är hundra procent pålitlig. GPS brukar tappa signalen och visar då till-fälligt felaktiga koordinater. Däremot går det, trots viss felmarginal, att avläsa hur den upp-mätta sträckan liknar den referensuppupp-mätta sträckan. Det går då att konstatera att GPS-signalen är någorlunda pålitlig för framtagning av referensmätning av vandringssträckan. I uppmätta GPS-koordinaterna konstaterades också brus och ibland kunde GPS-värden ha ganska stor felmarginal. Så långt som man vet så finns det olika korrigeringsalgoritmer i navigationssy-stem där man bland annat tar hjälp av accelerometern när smarttelefonen är i rörelse. Analys av empiriskt utförda experiment visar att barometerdata kan användas för att beräkna höjden samt bestämma vilken våning en person befinner sig på med en relativt god noggrann-het, se Figur 8.2. Eftersom den beräknade höjden från barometerdata är relativt nära den upp-mätta referenshöjden kan man dra slutsatsen att den beräknade höjden ger någorlunda korrekt höjd med en felmarginal på maximalt ca 3 m. Dock att tillägga är att barometerns data innehål-ler mycket brus vilket var förväntat då det nämndes i samtliga vetenskapliga artiklar. Barome-tersensorn kommer troligtvis vara användbar i framtiden för olika sammanhang dock att många experiment och analys av empirisk data återstår.
8.1.5. Framtida utveckling
Barometersensorn i kombination med accelerometersensorn skulle kunna användas inom vår-den där man har patienter som kan springa iväg eller gå vilse. Tanken är att sensorerna skall bäras av patienterna för att med hjälp av barometersensorn få reda på vilken våning en bort-sprungen patient befinner sig på och med hjälp av accelerometern få reda på om patienten tagit hissen eller trapporna.
För att få bättre precision i höjdmätning skulle man kunna utföra experiment där man placerar en referensbarometer längst ner i en byggnad, då trycket kan variera från dag till dag och timme till timme. En referensbarometer skall via en applikation ständigt skicka högsta atmo-sfärtrycket till en databas som andra barometern skall kunna använda som P0 (högsta lufttryck).
Referensbarometer skulle kunna vara ännu en likadan smarttelefon som den man utför mät-ningar med. En applikation skulle kunna visa ungefär vilken våning man befinner sig på i realtid, se Figur 8.3.
Figur 8.3. Ett exempel på hur en höjdberäknings applikation skulle kunna se ut i framtiden.
Den ekonomiska frågan tror inte vi kommer skapa problem då det inom snar framtid kommer det finnas barometersensorer i de flesta smarttelefonerna, även de som kommer klassas som gamla, men som fortfarande kommer vara användbara i sådana studier.