VTlggtat
Nummer: Titel: Författare: Avdelning: Projektnummer: Projektnamn: Uppdragsgivare: Distribution: TF 53=O4 Datum: 1990-02-22Validering av längsprofilmätare ingående i mätfordonet Laser RST
Göran Palmkvist och Georg Magnusson
Trafikant- och fordonsadelningen 5337002-9
RST/Geometriska mätmetoder RST Sweden AB
Fri
43» ..
.
vi: Vag-och
Trafik-Institutet
Statens väg- ochtrafikinstitut
Statens väg- och trafikinstitut
Pa: 581 01 Linköping. Tel. 013-204000. Telex 50125 VTISGIS. Telefax 013-141436 Besök: Olaus Magnus väg 32Linköping
< n m øa p w»A H r 4 H Innehållsförteckning Företal Sammanfattning
Laser RST som profilmätare Laser Accelerometer Datainsamling Databearbetning Resultat Profiler IRI
Inverkan av acceleration och retardation Diskussion Sid U I U I D M M U N N N H H H
VALIDERING AV LÄNGSPROFIIMÅTARE INGÅENDE I MÅTFORDONET LASER RST FÖRETAL
Det i föreliggande notat presenterade arbetet har utförts av Göran Palmkvist medan Georg Magnusson bidragit vid notatets
språkliga utformning.
SAMMANFATTNING
En undersökning har påbörjats för att dels geometriskt jämföra me-delst Laser RST producerade grafiska framställningar av vägytans längsprofil med motsvarande baserade på avvägning och dels studera sambandet mellan uppmätta jämnhetsmätetal från Laser RST och
mot-svarande mätetal beräknade från manuellt avvägda profiler. Två mäta
sträckor med längden 100 m som avvägts en gång vardera har utnyttm
jats i föreliggande inledande studie. Flera mätsträckor representem rande olika jämnhetsnivåer måste dock avvägas för att komplettera valideringsstudien.
Jämförelsen omfattar jämnhetsmåttet IRI, RMS-värdet för profilen inom ett specifierat våglängdsområde samt högpassfiltrerade pro-filer.
På grund av en i mätprincipen inneboende högpassfiltrering av de vägprofiler som beräknas och presenteras av Laser RST är en direkt jämförelse med de avvägda profilerna inte möjlig. De sistnämnda
måste därför först filtreras på samma sätt som i Laser RST.
En jämförelse omfattande sålunda filtrerade profiler innehållande våglängder upp till åtminstone 60 m visar god överensstämmelse
mel-lan med laser RST erhållna vägprofiler och sådana erhållna från
av-Vägning. För längre våglängder blir överensstämmelsen sämre p g a att de avvägda mätsträckorna är för korta för den insvängnings-sträcka beräkningsfiltret behöver om längre våglängder skall beak-tas.
Även jämförelse mellan IRI-värden beräknade av Laser RST resp från avvägning visar i huvudsak god överensstämmelse.
En undersökning av inverkan av kraftiga accelerations- och retarda-tionsförlopp påvisade nödvändigheten av att under mätning undvika sådana. Ett övervakningssystem som förkastar mätdata erhållna under alltför kraftiga hastighetsändringar rekommenderas.
l LASER RST SOM LÄNGSPROFILMÃTARE
Längsprofilmätning med Laser RST sker i princip enligt den s k GM-metoden. Denna metod innebär att vägens längsprofil avkännes
me-delst ett don som mäter avståndet från en punkt på ett mätfordon
till vägytan när fordonet körs längs vägen. I fallet Laser RST ut-görs detta don av en laser. Den sålunda erhållna signalen utgör då en bild av vägens längsprofil relativt' ett fordonsfast koordinat-system. För att möjliggöra konvertering av denna profil till ett
markfast koordinatsystem mäts fordonets vertikalacceleration me-delst en accelerometer. Genom derivation en gång av avståndsignalen fås längsprofilens vertikalhastighet relativt mätfordonet medan in-tegration av accelerationssignalen en gång ger mätfordonets verti-kalhastighet. Summering av dessa signaler ger vägprofilens verti-kalhastighet i ett markfast koordinatsystem, även kallad lutnings-profilen. En efterföljande integration av lutningsprofilen ger slutligen vägens höjdprofil.
Vid längsprofilmätning med Laser RST måste emellertid profilerna av flera skäl högpassfiltreras, vilket medför att en vägprofil uppmätt i en backe kommer att redovisas på samma sätt som om den vore
upp-mätt på horisontell väg, d v s de mycket långa våglängderna filtren
ras bort.
1.2 Laser
Den laser som används i Laser RT för mätning av vägytans längspro-fil har genom samverkan mellan med VTI och tillverkaren, det svenw ska företaget Selcom, speciellt utformats för sitt ändamål. Denna laser har en samplingsfrekvens av 32 kHz, mätområdet 128 mm och upplösningen 0,03 mm. Då det i vissa extrema fall visat sig att lasern kan komma utanför sitt mätområde har i denna studie också begränsade mätningar med en annan laser med det dubbla mätområdet genomförts.
1.3 Accelerometer
För mätning av mätfordonets vertikalacceleration utnyttjas en mycket noggrann servoaccelerometer av fabrikat Sundstrand med valbart mätområde som i denna tillämpning har satts till :2 g.
2 DATAINSAMLING
Två mätsträckor med längden 100 m, belägna på Rv34 och Lv636, har
avvägts en gång vardera° Avståndet mellan de avvägda punkterna var
0,25 m, med en viss lågpassfiltrering av vägytans textur åstadkom-men med hjälp av en mindre platta placerad under avvägningsstångens fot. Inverkan av vägytans textur har därigenom reducerats men samp-lingsintervallet bör vid fortsatta studier t ex halveras och plat-tans storlek anpassas till detta, Uppskattad noggrannhet vid avväg-ningen är il mm.
Dessa mätsträckor har också uppmätts med Laser RST och man har där-vid försökt att så noggrant som möjligt mäta profilen i den avvägda linjen. Mätningen har startats manuellt vid passage av mätsträckans startpunkt° Enligt ovan högpassfiltrerade lutnings- och höjdprofi-ler med samplingsavståndet 0,125 m registrerades.
Jämnhetsmätetalet IRI och profilens RMS-värde har beräknats för var tionde meter vid olika mäthastigheter och accelerationsförlopp och med utnyttjande av ordinarie mätprogram.
3 DATABEARBETNING
Insamlade data bearbetades med hjälp av ett datorprogram skrivet i
programspråket Turbo Basic och avsett för PC-datorer.
Den avvägda profilen högpassfiltrerades på samma sätt som sker vid profilmätning med Laser RST med utnyttjande av ett filter av typ tredje ordningens Butterworth. Den avvägda mätsträckan var för kort
för att möjliggöra studium av långa våglängder p g a den långa in"
svängningstiden för detta högpassfilter. För att reducera inverkan av insvängningsförloppet vid filtreringen av den avvägda profilen, liksom vid beräkning av motsvarande profil från registrerad lut-ningsprofil från Laser RST, får resp signal passera genom filtret ett antal gånger före den slutgiltiga högpassfiltreringen.
Även för den avvägda profilen beräknades ett IRI-värde för var
tionde meter.
Beräkningsprogrmmet innehåller också rutiner för beräkning av
vä-gens lutningsprofil utgående från registrerade mätdata från Laser
RST (avstånd mellan fordon och vägbana, vertikalacceleration och
hastighet) insamlade med tidsmellanrummet 4 ms. Detta program är i princip detsamma som det som utnyttjas i Laser RST.
4 RESULTAT
4.1 Profiler
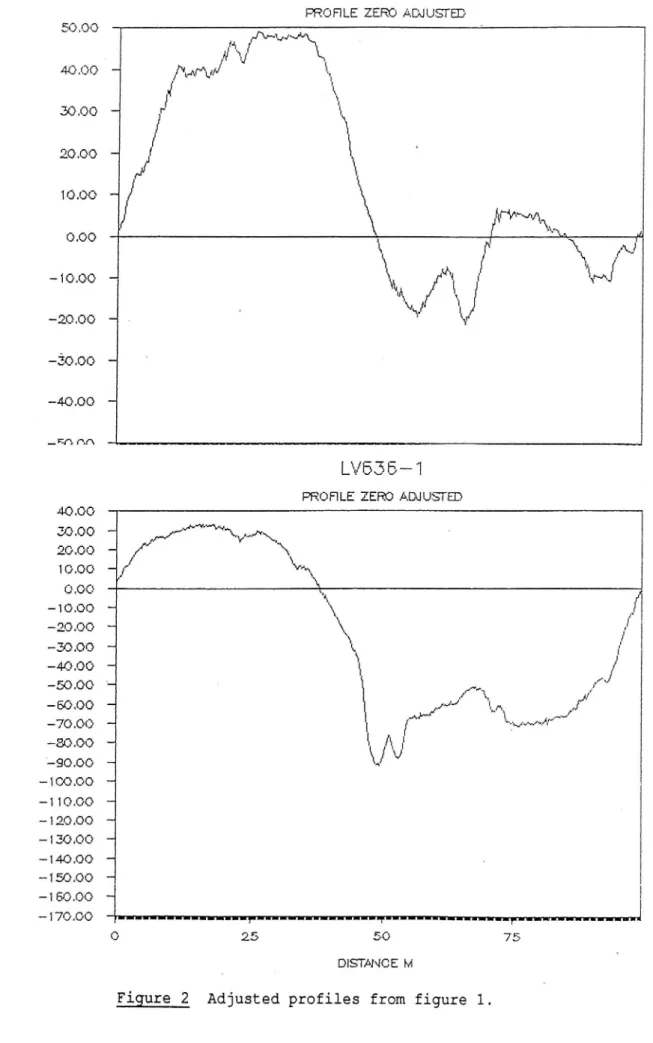
Figur 1 visar de avvägda profilerna för de två 100 m långa
mät-sträckorna på Rv34 och Lv636. För underlätta identifiering av kan
rakteristiska egenskaper hos profilerna har de ursprungliga profi-lerna P(x) justerats så att start- och slutpunkt ligger på samma nivå (figur 2) genom transformationen:
P' (1:) = P(x)-kxx
där x = distans
k = lutningskoefficienten för en linje genom profilens start- och slutpunkter
Följande beteckningar gäller fortsättningsvis:
L = 15, 30, 60 eller 100 anger för vilken gränsvåglängd i meter som högpassfiltret reducerar amplituden med högst 30%.
AV = högpassfiltrerad avvvägd profil (mm).
RST/L-L = med gränsvåglängden L högpassfiltrerad profili beräknad från den lutningsprofil (mm/m) som registrerats med Laser RST.
RST/H-L = med gränsvåglängden L högpassfiltrerad profil baserad på den höjdprofil (mm) som registreras med Laser RST.
RMS = RMS-värdet (mm) över mätsträckan för resp profil.
högpass-filtrerad med gränsvåglängden 30 m.
För att eliminera inverkan av mätsystemets insvängningsförlopp har vid beräkning av RMS-värdena den första delen av mätsträckan, 20 m, inte medtagits.
RMS-30 beräknas eftersom detta värde är ett av de jämnhetsmått som rutinmässigt beräknas vid mätning med Laser RST och presenteras här
som medelvärdet av åtta mätningar.
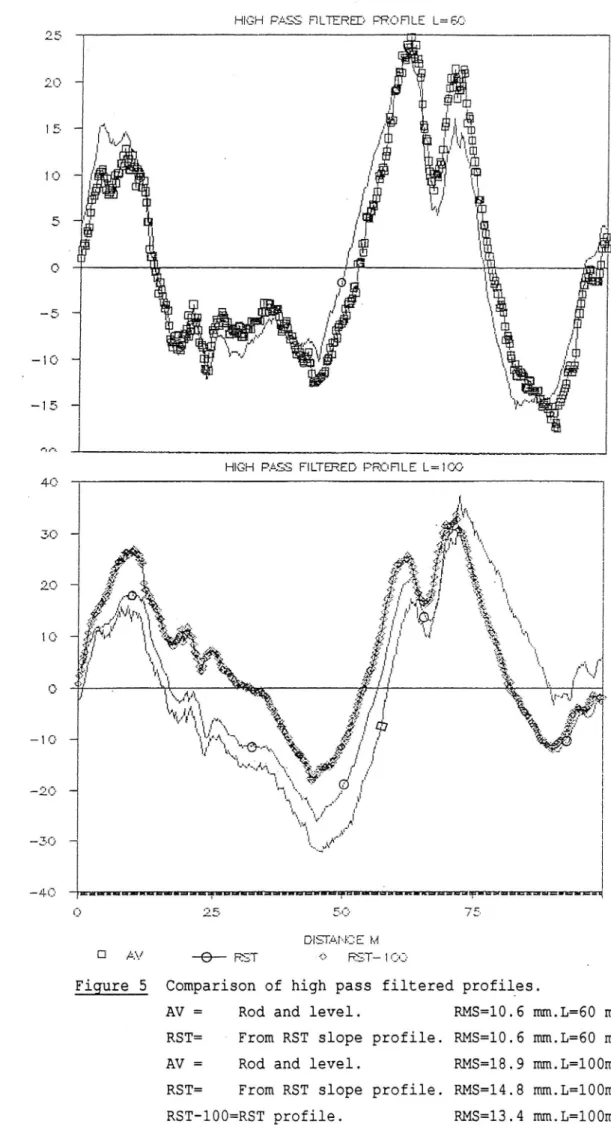
Mätning av lutningsprofilen skedde i samband med avvägningarna me-dan mätningen av höjdprofilen utfördes cirka tre veckor senare. Figur 3 - 5 visar de högpassfiltrerade profilerna från mätsträckan
på Rv34 tillsammans med RHS-värdet för resp profil. Frånsett
in-svängningsförloppet i början av mätsträckan är överensstämmelsen god mellan de olika profilerna för gränsvåglängden L = 15, 30 och 60 m. För L = 100 m påverkar insvängningsförloppet resultatet i alltför hög grad. Det bör observeras att gränsvåglängden i detta senare fall överensstämmer med mätsträckans längd och bättre resul-tat torde erhållas vid utnyttjande av längre mätsträckor.
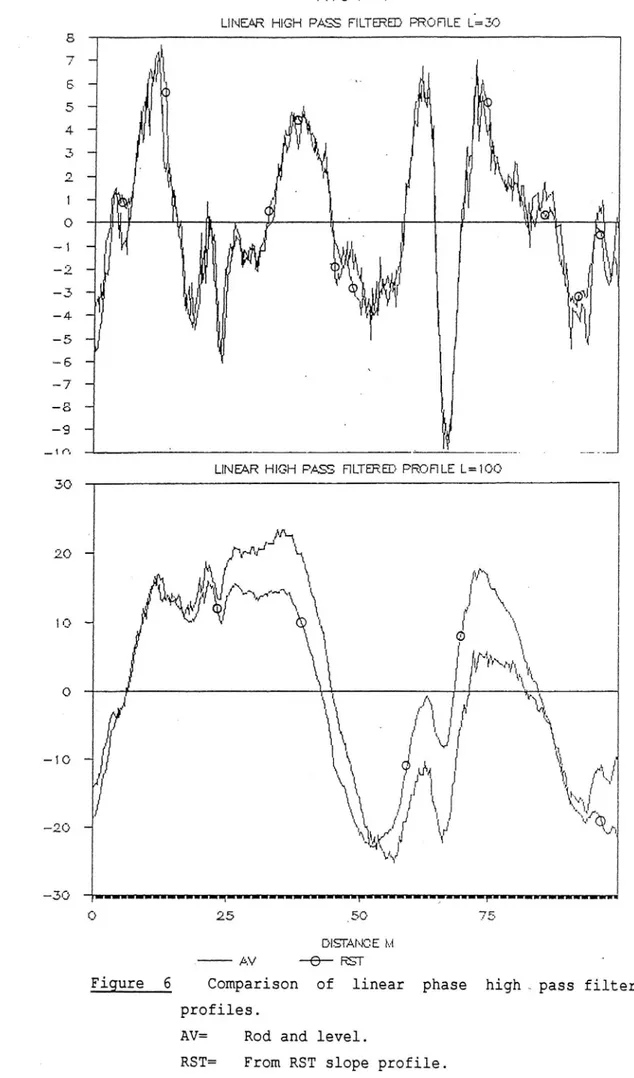
Den högpassfiltrerade profilen har kraftigt distorderats för våg-längder som ligger i närheten av den valda gränsvåglängden. I syfte att restaurera denna distorsion har profilen filtrerats ännu en gång, men nu "baklänges" genom samma filter. Denna procedur ger en filtrering med linjär faskarakteristik och resultatet av denna tek-nik applicerad på profilerna visade i figur 4 och 5 framgår av figur 6 a och b. Med beaktande av att de långvågiga komponenterna i den profil som visas i figur 2 är borttagna ur profilerna i figur 4 och 6 kan konstateras att de enskilda kortvågigare komponenterna i
figur 2 lättare kan återfinnas i figur 6 än i figur 4.
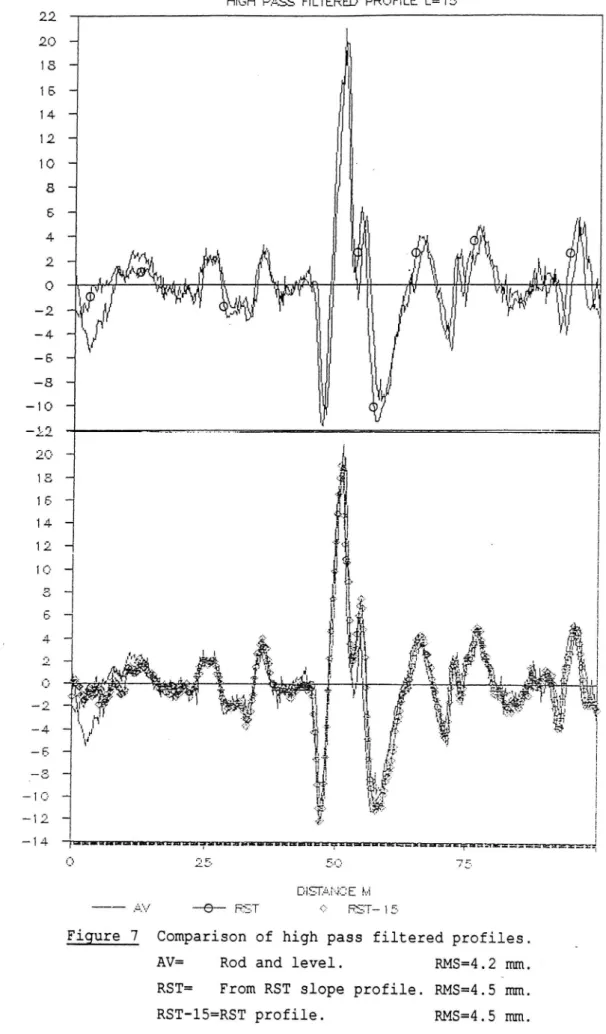
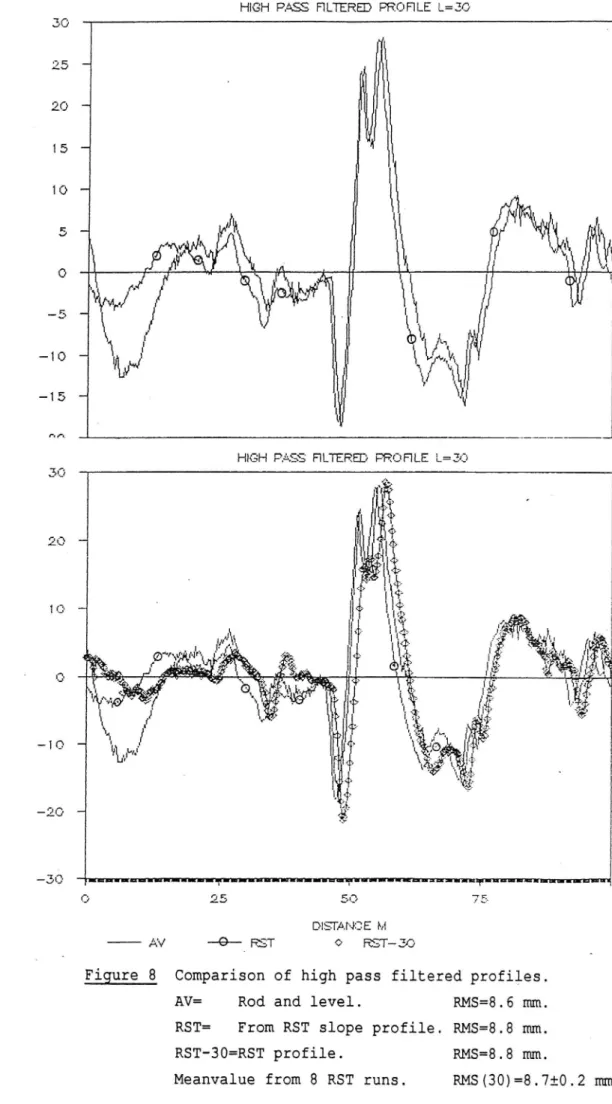
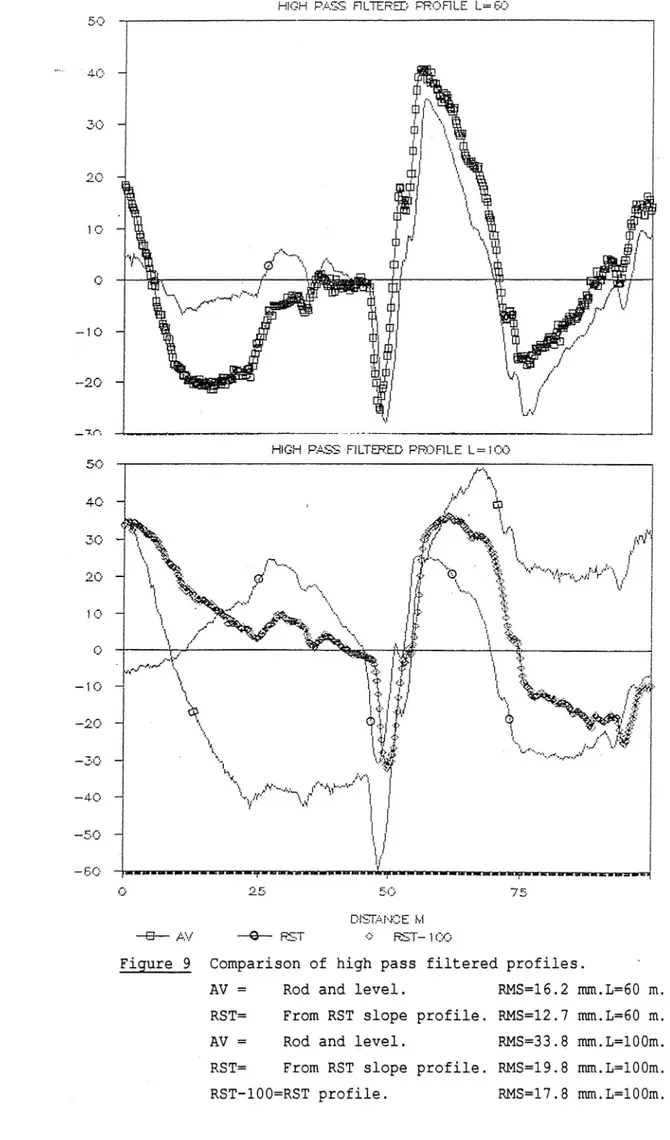
Figur 7 - 10 visar motsvarande resultat från mätningar på Lv636. Här är resultatet sämre för filtrerade profiler med gränsvåglängden 60 och 100 m, sannolikt beroende på att vägprofilen före mätsträc-kans startpunkt påverkade resultatet av mätningarna med Laser RST.
4.2 IRI
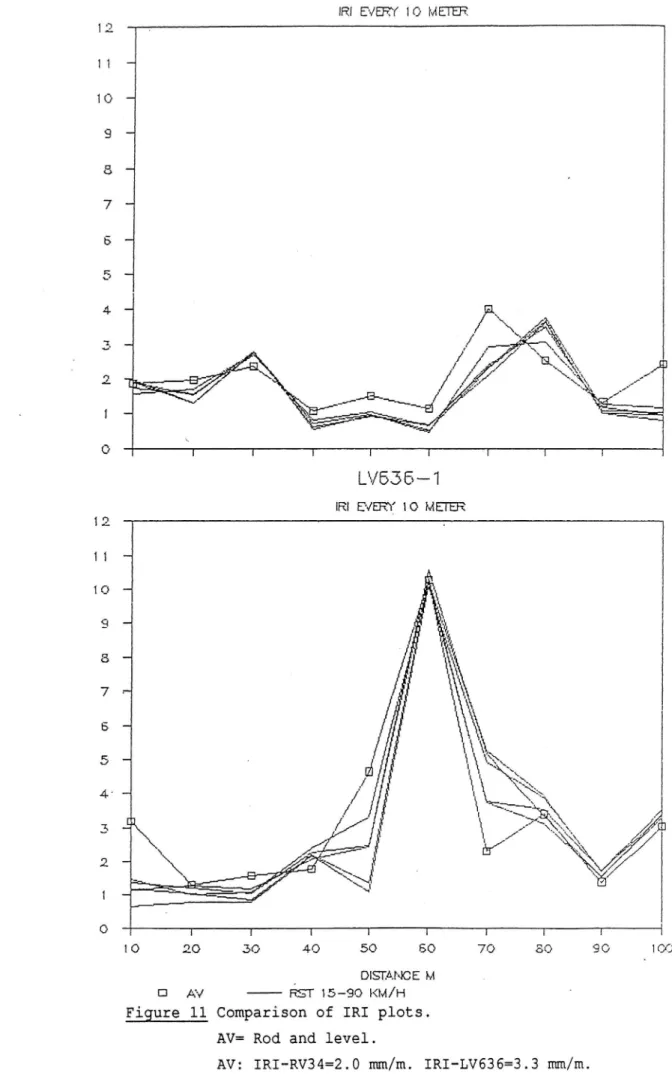
Figur 11 visar IRI-värdet för de avvägda mätsträckorna beräknade för var tionde meter samt motsvarande värden registrerade av Laser RST vid mätning i hastighetsintervallet 15 till 90 km/h.
Figuren visar också medelvärden för nio mätningar med intervallet för 95% konfidens angivet.
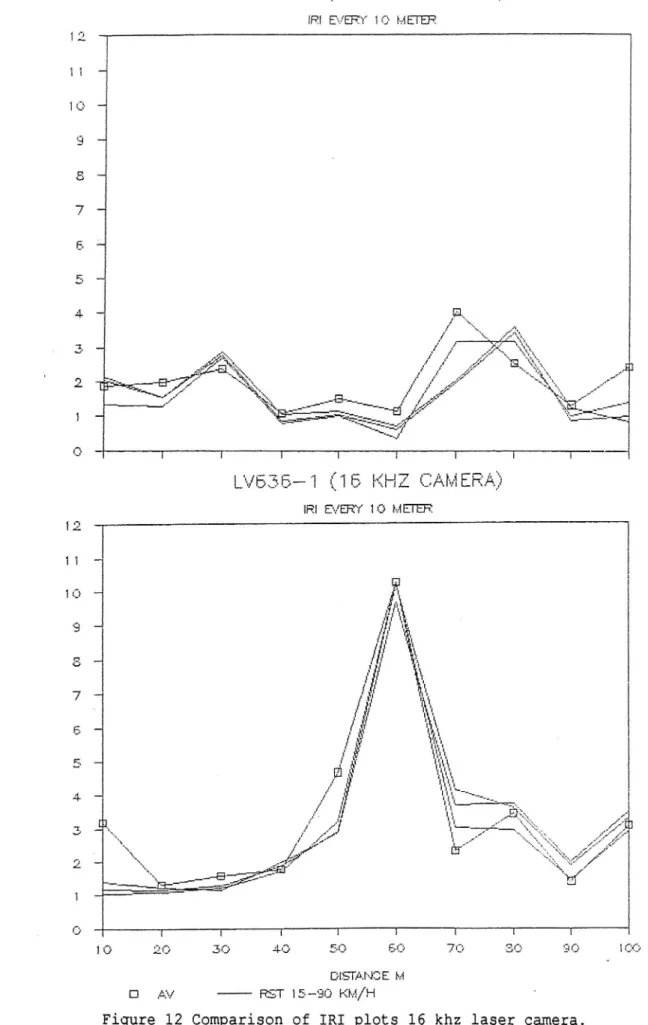
Tidigare mätningar hade visat att mätområdet för den höjdmätande lasern under vissa omständigheter, t ex vid mätning på mycket ojäm-na vägar, kan vara för litet. I Laser RST ingår emellertid två ty-per av lasrar, förutom den ovannämnda en annan Selcom-laser med dubbla mätområdet men med halva samplingsfrekvensen och upplösning-en 0,06 mm. I syfte att undersöka om dupplösning-enna laser kunde användas för längsprofilmätning genomfördes ett antal mätningar även med denna. Resultatet utryckt i beräknade IRI-värden framgår av figur 12. Det
är uppenbart att båda lasertyprerna kan användas för
mätområdet för längspprofilmätning trots det begränsade mätområdet
är att samma laser också används för texturmätning, vilket kräver
en laser med hög upplösning.
4.3 Inverkan av acceleration och retardation
De resultat som presenteras från mätfordon som mäter enligt samma principer som Laser RST är normalt grundade på någorlunda konstant mätningshastighet. Mätsystemens känslighet för kraftiga accelera-tioner och retardationer, speciellt i kombination med låga mäthas-tigheter, redovisas inte.
Figur 13 visar ett mätresultat erhållet vid en kraftig acceleration från stillastående följt av en inbromsning. Under mätsträckans första 20 m genereras för höga IRI-värden. På mätsträckan Lv636 inträffade dessutom att den höjdmätande lasern kom utanför sitt mätområde p g a fordonets nickrörelse under bromsningen i kombina-tion med att vägens längsprofil på denna plats har en geometri som
förstärker denna effekt.
Figur 14 presenterar en detaljerad bild av mätsignalerna under ett accelerations- och retardationsförlopp med Laser RST. Den övre kur-van (-) visar den av nickvinkeln beroende komponenten av mätfordon nets längsaccelerationen som påverkar vertikalaccelerometern. Denna signal har lågpassfiltrerats för att framhäva störsignalen (ett accelerationssteg). Nollnivå och skalning är inte korrekta i
figu-ren. Störsignalen fås ur: w -dV/dtxa- (l-cosa) xg
där *Åhh = hastighetsförändring
a = bilens nickvinkel (positiv då bilen lutar bakåt)
Kurvan (o) är registrerad lutningsprofil från vilken jämnhetsmäte-talen beräknas. Störsignalen i vertikalaccelerationssignalen inte-greras en gång samt divideras med bilens hastighet vilket sålunda ger störsignalens bidrag till lutningsprofilen. En jämförelse mel-lan IRI-värden i figur 14 (x) med motsvarande i figur 11 visar att resultatet under start- och stoppförloppet helt domineras av stör-signalen. Data som registreras under dessa betingelser är sålunda felaktiga och skall förkastas.
Figur 14 visar också en kontrollfunktion (+) som beror av *Watfv.
Denna funktion antar höga värden i början och slutet av mätsträckan och indikerar att data skall förkastas. En sådan kontrollfunktion är möjlig att införa i mätprogrammet.
5 DISKUSSION
De resultat som presenterats bör betraktas som ett underlag för en mera omfattande valideringsstudie där ett tiotal representativa mätsträckor med varierande jämnhetsnivå ingår. Mätsträckor med tätare avvägning böringå liksom längre sträckor för studium av förmågan hos Laser RST att mäta långa våglängder men där avvägnigen
PRO F1 LE MM PR OF IL E M M (T h ou so n ds :) 500.00 4%.00 4(:0 .O O 350 .00 300.00 250.00 N (N 5 ."1 O
8
I? ) C. D I 50 .OO 0 .00RV34-1
pmxus
LV635-1
PHNHE
- _ w _ _ F-__ 25 50 75 0 DISTANC E MFigure 1 Profiles measured with rod and level
P R O FI LE MM ' PR O F]L E HM 50 .00 40 .(30 30 .00 20 .00 -10.0C' -20.C°O -40.00 _- 'din 40.00 30.00 20.00 10.00 0.00 - 10.00 -20.00 --3000 -4000 -5000 - 60.00 -70.00 -EDOO '-9000 - 1 00.00 --1 10.00 - 1 20.00 - 1 30.00 - 1 40.00 -1 5/3) .OO - 1 60.00 --170.00
R'V34- '1
PROHLE ZERO ADUUSTED
I* fäwüwf IH. /Nwa\ # 4 5 . k / \ f FSA*- l
./
\
r
IkI PI \R, .'ark-j HI g). / lll j _ än '{ 1 km/ * /
v I ' _ '-5' l'k'r' LV 55 5 - 1 PRO Fl LE ZERO ADJUSTED_ MNWWNWÅMEV#M\C __ 'IfXV . '1'r' \\§ 'i ._ k'\ ,J _. ,J
».
.x
_. II .... S i'._
.Af
/ "^ _ r-/dv/ Xi* Å rfÅ ' Ahl. b I' /h/.q'df - l '-l'wa'sM/v. l 4 K ü,_
V V
- Tu_ --_ I __ _---_---r - - _ I - - _ - - ----_-G 25 50 7 5 DISTAN G E MFTW/.3 4 - 1
w'H PAF? HLTERED PROFILE L=15
,-\ HI : §_ m J E O m m ._ 1 % " 1. b . .. 44 4. 14 4... . -L C r i . .w ... ; f i ... p. a|o |l l un . .. | §0 4 . I n r uq a l ub i d ün n H l .. wannaawuiuwnuäuçüuiü ? §. m 4 c üm u G _T. R%
Fi ure 3 Comparison of high pass filtered profiles.
Rod and level.
AV= RMS=2.3_mm.
RMS From RST slope profile. RST profile.
2.4 mm. RMS=2.2 mm. RST=
F2V54-1
\
HIGH PASS FILTEFZED PROFILE L=30
. I\ I a . s å ® I M hr -1 . , h ul l . .w-ul .| .. .H W . l. l l : üi âi 0. < (7 .. . n--nunfnnuznnuüaa-muuu E z M 4 c o m a _ 4. a_ _. _ .b 5 .4 3 2 1 C 1. 2 3 _ wêA M J E O E m 15 M Umm-.x F3.: - 71:?
-e-FST
AVFi ure 4 Comparison of high pass filtered profiles.
Rod and level.
AV= RMS=4.5 mm.
From RST slope profile. RST profile. 4.5 mm. RMS=4.4 mm. RMS(30) RMS RST= RST-30 4.3i0.2 mm. Meanvalue from 8 RST runs.
P R O H LE f M A P R O H L E th fx) I'. M O
HlGH PASS FILTERED PROFILE L=1CO
Ein-luá_ _III n u--uE-u ._I_ _-S - u _ __ _JSF-:Hansi _-==
0 '2' F'-, 5.1.7. 75..
DEIMWZEhd
[3 Av _9._ 531' 4;» HET-11:24::
Figure 5 Comparison of high pass filtered profiies. AV = Rod and level. RMS=10.6 RST= - From RST slope profile. RMS=10.6 AV = Rod and level. RMS=18.9 RST= From RST slope profile. RMS=14.8 RST-100=RST profile. RMS=13.4 .O mm.L=60 m. mm.L=6O m. mm.L=lOOm. mm.L=lOOm. mm.L=lOOm.
P R O HL E I M A P RO H L E h m i RV34-1
LINEAR HIGH mas FILTERED PROHLE Ll--so
LINEÅR HIGH PAS HLTERED PROHLE L=IOC>
1an
MH
TE \
\
gm
MM!
ål
1
r
w
a\
av
A
fx
?W 'E
H 1 v* Vf ___ ___ r _ , -__F_ _____. o 25 ,50 75 [msmmmEtn ,---Av -fä-RSTFigure 6 Comparison of linear phase high -pass filtered profiles.
AV= Rod and level.
PR OH LE .MM P R OH L E H M 22 20 0] 4 1 0 1 ' ON -P C H O J O N OJ
LV 6 56 - 1
HtGH pass HLTERED PRORLE L=15
'.x . / JJ . "W 443* ri d* A1 0 I
* l l -. -1 ;c c% ?= üt 1 : : 1 ' ? D u
Bl:- - _ u m E w ü u J i H g I '-- 3? Inka-:ZEESJET u hI i i I S u _ * h I d h x u :url ' ;5 åk 7: C'I i"J33 E M __ .ha _6._ <3:) ?IST- ]
Figure 7 Comparison of high pass filtered profiles. AV= Rod and level. RMS=4.2 mm. RST= From RST slope profile. RMS=4.5 mm. RST-15=RST profile. RMS=4.5 mm.
PRO H L E h M 1 P R O H L E l M d
LV 636-1
HHS-;H pass HLTERED PROHLE L=30
0 to
_
UI :- 3 -r 3--f
DISTAF'JCE M
AV -9-_ RST <> EET-30
Figure 8 Comparison of high pass filtered prcfiles. AV= Rod and level. RMS=8.6 mm. RST= From RST slope profile. RMS=8.8 mm. RST-30=RST profile. RMS=8.8 mm.
*H LE FM i , - U F R P R O H L E F M H
LV
- 1
HlGH pass HLTERED moms L: 50
_ _-_IT-EU III-__T _ I - - _
_--u 25 50 75
DISCANSIE M -Ei-Av -4i-RST O HET-ICO
Figure 9 Comparison of high pass filtered profiles.
AV = Rod and level. RMS=16.2 mm.L=6O m. RST= From RST slope prøfile. RMS=12.7 mm.L=60 m.
AV = Rod and level. RMS=33.8 mm.L=100m.
' RST=
From RST slope profile. RMS=19.8 mm.L=100m.
PR O H L E I M W P R O H L E h M i 1G '1/1
#535 -1
LINEAR HIGH PASS FILTERED PROHLE L=3Å>
4ä5 == =7 * *_ "
LINEÄR HIGH PASS HLTERED PROFILE L=IOO
MN . ...av «/^Wr^'x - ' x _. ,få 7- V VN. fádä\ / \.J /
/
"M
\
I
-4,
\
'I 1(2)
k' rw.
/
vx
-1 \i. az k\ \ 2*
''
R
i
.Qfs/ W \
/
d___w_ V\
L
.vx-N . , . _kg Ht* H v11' r\\
.
"
\\
X ' *x
_ mVW- MJ/ K K Få) I'm'i
Wj'wr1 f N/ \'
m1 r1/
, q IM.. l \ i; X 5' VM/Ry J._
/ '
.i J
_. l 's . X' G 25 50 75 DISI'AMJE M --.MJ -*9-RST _Figure 10 Comparison of linear phase high _pass filtered profiles.
AV= Rod and level.
IR IMM/ M IR Ih mb /M 0 -4 (71 bl PJ
RV54-1
JR!EVE?(IO?M§ER
LMESE-T
lRI EVERY 10 mm
I T I I I 7 I I IC) 20 30 40 50 50 70 80 90 100 _ DEEAMCELA :3 Av ngr 15-90 KM/HFigure 11 Comparison of IRI plcts.
AV= Rod and level.
AV: IRI-RV34=2.0 mm/m. IRI-LV636=3.3 mm/m.
RST=RST registrations.
Meanvalue from 9 RST runs:
i R I M M/ M I R I M M ÃM L ü (2 0 (_1 1 to 03 (D UI (d [0
FSVE 4 -1
1 5- W..HE 'Cl M ERA)
JR!EVE?rIOtMUER
/ "1, ...R :I: I\'. I "-. .-' -" '-. '.. '0 1_' nu _' ,24.3%' . 'o,. J'r JIa" of_f.,-.'/f'x\._ *Ä '-I._ ' ;får *15:a v'l I. ,"ü'r B c \ _. _agwp , I i. _ gr' .\ , ..-_'- __ \ 'i \$ .'o'( 1 I 5 s*2. -,- 'r"EF-'za 'En r
'PR-.lI i *A.h ...Je
, (- C/<
xx_ -Ju'R är __-B'H__ II. I 7;: 1_ ml .-.t'ä ._-wJJ- - __-a )) J. -_____-f'
-
»s-äwwaa-:xr
:_21:
IFEI E'a/EF 'K 11:? M E [LJ-<5.' DEmMm35M 0 ;M -- .3T15-80 KM/HFigure 12 Comparison of IRI plots 16 khz laser camera. AV=R0d and level.
l R I M M / M I RIM M H M (II 25 20 1 5 1 C U1 O 4-7- - - ..._____ k / z . \ - --M._.KA OpL/(Jl 7_ 7 .__ 4. l 1/ I I '\ aj \\ N....H I I <:I/A/ ./ ,7 kk '11 EK 'c' \ á/A \ Q / x - ._ \ 4).) '5. o. . I I), i ' xxx. 6%/ p. /1/ '1 .. P 5 I qux K- lll K..'- '|l 3: ."\\ Z: \-, .4 :7 / .f . all,... ).I f,)f 1,' i" J I' -4 4.' I' // v " W' .JJ N\'. _ .nxä \S '4-- 'N-8/ T 1 C' 25:-" .. s N. DISTANCE M EI " __- FJST .M-3 - REF I '1 -r . 1531 E 1 '33' M
_,...:'«--'--j----..____
s___
. v ,31 "'-- '°'--- / / L "-__ - _- (_/ ._ IJ." k 001' '°--__ \ I IJ-.. 3/ 0 'hc-.__- Wi* < 0 \\ '.I/ /FUA '\I ?i '7 K.. ('57 2:: /,' < i." { Å \p' .I' \\ (3_ I l' __ '2" ,Il "x "- f' i' i' \ \ \ ,pl/ ' .i/ .\ '. /lll/ gr /' x'.. K' / a_ I . 13 IRI and 70 80 '-3 C; 1 0:3and velocity plots from RST runs when starting
accelerating from a stop and a then braking to a
L N
.ÄGGELER$TKMv/RETÅRDÄTHNWf?v34
SUDPEJACC/VEuWTESthu 8C' , L_.\ "-. .1,1 ,H I 5 __ f 'gl I i' /luh 'q _ .I L-.l 'i '.4 i \ [H 1 I"fm i I & 'MI I' \ i! IV" bi Q
' J | I 5{_ '7 *Wiä h '5.' »H ll.5 f l I! figur 1.5' 1! f' ' l ' l_l . o I 1 'I | M 4 t.-'-"' ' I I
46-
LWWAMM Mijäwhf
H
U
I
'v
*
J
2-0 -
'
M
E "12', - ,ø 3 { H), "5 ________._._._._.___________ ( 41114!*6 :if-'FAuw»"' d__yfdfr_. H. ;1 Å'u my*;§d*ät las"Ä ""a..__ ^v
n '. ÅR m" '$' ^^"'h' Å "4 '-c'u'Fêk-Wmu-m'káz. A14 2.13_ i v M: L' { ?<2 :<1
h-- i i 2 i 'i . .Pr 1 . Y . LJ.. "1 .wn'a"-'^..+h'." »(Up.'»,,_'._.._.d ir_
-' "' P % .i ' ilküiwd 'avm J J. ...mil i
_-1 U . 3 ' 'IU'F'IUI 1x] ( P "I *J-_ r . ' | UH i 1 -Långa -- Jani' Å i -30 T* . C' 1 .2.5 .25 _.7 .5 5G EE: .5 75 57 1 CC" ' CHEFMNCE MUEP.
'-9- SLC'JP E F- RC'FILE MM /M -A- VELC'B ITT' fv.-1',."'S "9- FILTER EB' . .55243.
-+-üm*nbwüwümünfe >:2R|mmnw
Figure 14 A detailed view of registrated signals from a RST run when accelerating from a stop and then a retardation to a stop again.
(.)=Low pass filtered vertical acceleration.
Disturbance level =0.07-0.08 m/s**2 which corresponds' to a pitch angle :1.5-2 degrees when the longitudinal
acceleration of the RST car is :2.3-2.5 m/s**2.
(°)=Slope profile mm/m which in this case mainly is
generated from the disturbance signal above.
(A)=Longitudinal velocity of the RST vehicle m/s.
(x)=IRI values mm/m.
(-)=Proposed calculated control function (CF)to
indicate an incorrect slope profile.
If |CF|>e then the comfort variables are not
accumulated for a certain distance.(Missing