BIFROST — INSTRUMENT FÖR AUTOMATISK DIGITAL
REGISTRERING AV VÄGARS TVÄRPROFILER
av
Olle Andersson
BIFROST — INSTRUMENT FÖR AUTOMATISK DIGITAL
REGISTRERING AV VÄGARS TVÄRPROFILER
av
Olle Andersson
Sammanfattning
För rationell tvärprofilering av vägytor, främst med syfte att bestämma spårbildning p g a permanent sjunkning samt dubbsli tage, har en bogserbar tvärprofilometer konstruerats, som kan registrera en profil över en vägbredd på högst 5 meter. Profilo- meterns avsökande del utgöres av ett ledbart balksystem, som för
ett mäthjul tvärs over vägen utefter en rät linje. Med jämna
mellanrum på 17,1 mm stansas mäthjulets höjd över ett artificiellt nollplan, som bestämmes av profilometerns inställning, vilken göres grovt med hjälp av libeller. Mäthjulet bringas att som första och sista punkt på profilen beröra två invägda fixar, varigenom nollplanets läge blir fixerat.
Höjdkoordinaterna bestäms på elektrisk väg genom mätning av resistansändring, och mätresultatet föreligger i form av en elektrisk spänning, som mätes med digitalvoltmeter och stansas på hålremsa i Facitstans. Hålremsorna utvärderas direkt av dator. Den manuella delen av registreringen har reducerats till stans ning av diariedata. Datorprogram har utarbetats i Basic Fortran, som kopierar diarieinformationen och beräknar spårdjup samt andra geometriska prametrar hos profilen. I förekommande fall erhålles profilen plotted t ex på radskrivare. Profilerings- tiden är några minuter.
BIFROST - instrument för automatisk digital registrering av vägars tvärprofiler._____________________________________________________ Inledning
Vägytans tvärprofil är en av de mest fundamentala kriterierna på vägens tillstånd. Speciellt tvärprofilens ändring med tiden är ett mått på icke blott nutillståndet vid varje mätning utan även vägens förmåga att motstå trafikbelastningen och miljöfaktorerna. Tvärpro filen återger icke blott slitlagrets egenskaper utan även egenskap erna hos vägkroppen i dess helhet. I vissa länder är tvärprofilen (spårdjupet) det enda använda kriteriet på nedbrytningen av väg kroppen under inverkan av trafikl%sten. I andra länder användes för detta ändamål ett tjänstbarhetstal (serviceability) vari ofta tvär profilen, representerad genom spårdjupet, ingår som en viktig del. Med de senare årens utveckling av vinterväghållningen har slitaget genom dubbade däck kommit att få en många gånger dominerande inverk an på tvärprofilen. Att särskilja den del som är ett resultat av sammantryckning av vägkroppen fordrar särskilda åtgärder, såsom införande av flytande fixar i slitlagret.
Mätning av tvärprofiler utgör en stor del av de rutinmätningar i fält som utföres på institutets vägavdelning. Även om upptagning av tvärprofiler kan ske automatiskt i analogform, kräver utvärderingen av diagrammen tidsödande manuella insatser. Vid dåvarande väginsti- tutets bärighetsavdelning konstruerades därför med början år 1970 i samarbete med institutets maskintekniska avdelning en bogserbar tvärprofilometer, avsedd för automatisk stansning av profildata på hålremsa. Då hela den efterföljande bearbetningen av data kan ske i dator, reduceras det manuella arbetet till hantering i fält av själva profilometern, vilket kan utföras av en man men bör för bästa effektivitet utföras av två man. Instrumentet har fått arbets namnet BIFROST: bogserat instrument för jregistrering och stansning av tvärprofiler.
Konstruktion och verkningssätt
Profilometerns uppgift är att bestämma vägytans höjdkoordinater i ett vertikalplan tvärs över körbanan, dvs en bredd på ca 3,5 meter. Höjdkoordinaterna skall i allmänhet anges i relation till något referenssystem, vilket brukar medföra en tidskrävande avvägning och därpå grundad inställning av instrumentet.
Här valdes att göra endast en grov inställning av instrumentet och därefter göra mätningarna relativt till fixar, som fastsättes i vägbanan så att deras höjdkoordinat mätes av profilometern genom att dennas mätdon passerar över fixarna, t ex som första och sista punkt i den mätta profilen. Av tänkbara metoder att mäta höjdkoordinaten valdes att använda ett variabelt elektriskt mot stånd, i föreliggande fall en trådlindad vridpotentiometer med upplösningen 2 ohm, linearitetstoleransen 100 ohm och totalmot
ståndet 20 Kohm.
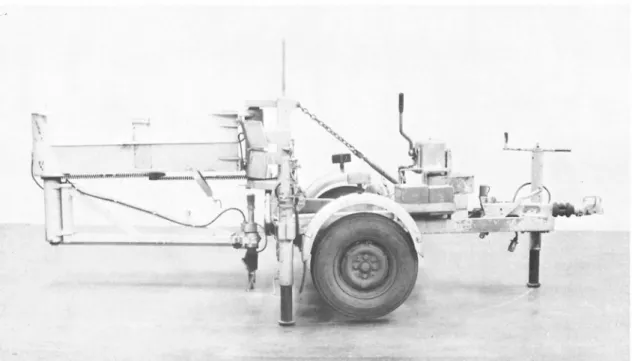
BIFROST är uppbyggt på ett enaxligt efterfordonschassi och har en totalvikt på ca 500 kg (fig 1). Mätdonet utgöres av en mäthjuls- försedd vertikal rund stång, lagrad i kulbussningar och i ena änd en utformad som kuggstång, vilken driver vridpotentiometern. Mät- hjulet är gummibelagt (0-ringar) och har 86 mm diameter. Mätdonet är monterat på ett svängbalksystem ABC (fig 1), utfört så att en rak mätsträcka på 5 m längd kan avkännas. Balksystemet består av två lika långa (1,25 m) armar, vars inbördes vinkel styres av kedjedon på ett sådant sätt att vinkeln mellan de två armarna alltid ändrar sig dubbelt så mycket som vinkeln mellan vardera armen och en fast riktning. Mätdonet kommer därigenom att röra sig utefter en rät linje. Mäthjulet bringas på samma sätt att inriktas i mätdonets rörelseriktning.
I BIFROST är balksystemet av tunnväggiga stålprofiler och har så stor böj styvhet, att den vertikala rörelsen hos mätdonet blir mind re än en tiondels millimeter, då mätdonet förflyttas längs den 5 m långa mätsträckan.
Systemet är upphängt i mätfordonets vänstra bakkant, varför man, om mätanordningen uppställes vid höger vägkant, kan mäta hela kör- banebredden 3,5 m utan att behöva blockera mer än 1 meters bredd därav med mätfordonet. Man kan därigenom utföra tvärprofilering utan att avspärra körbanan. Man behöver taga körbanans fria bredd i anspråk endast den tid det åtgår att föra ut mätdonet till kör banans kant och återföra den till mittläget. Denna tid är i gynn samma fall mindre än en minut.
I mätläget vilar fordonet på tre stödben, varav två manövreras på hydraulisk väg. Genom libeller horisonteras mätapparaten i längs-och tvärsled genom justering av stödbenen i höjdled. Horisonter-ingen tjänar endast som en grovinställning, eftersom mätnHorisonter-ingen VTI. Rapport Nr 22
sker över fixar, om noggrannare angivning av tvärprofilen är er forderlig.
Balksystemet kan för transport genom frigörande av en spärr fixer as parallellt med mätfordonet och fällas framåt i vertikalplanet, så att det kommer att befinna sig över mätfordonet.
I transportläget skyddas mätsystemet för nedsmutsning genom ett plastkapell. Mätfordonet är försett med erforderliga ljussignaler och påskjutsbroms så att det kan transporteras vid en hastighet av 70 km/tim. Dragfordonet kan vara vilket fordon som helst med 50 mm dragkula.
Dataloggning
För mätning av de motståndsändringar som är betingade av kännarens vertikalrörelser matas potentiometern med en elektrisk likspänning på ett sådant sätt att utspänningen noll erhålles, när potentio- metern är till hälften invriden. Denna nollpunkt kan justeras inom ganska vida gränser. Känsligheten hos systemet är vidare justerbar, så att den genom enkla åtgärder kan ställas in på 1 volt per centi meter. Kalibreringen kan lätt kontrolleras med hjälp av passbitar,
och nolljusteringen göres vanligtvis så att man vid profilens ena ände får utgångsspänningen noll.
Utgångsspänningen mätes med hjälp av en digitalvoltmeter av märket Digital Multimeter VM 1613. Denna voltmeter ger fyra siffrors av läsning. Den är dessutom försedd med BCD-utgång, så att den upp mätta spänningen kan registreras digitalt.
För denna registrering är mätsystemet försett med en datatrans missionsenhet av Schlumbergers tillverkning, som driver en hål- remsstans modell Facit 4070. Datatransmissionsenheten är försedd med en teckengivarenhet, som kan ge tio siffror jämte fyra val
fria styrtecken. Härigenom kan erforderlig diarieinformation läggas in på hålremsan. Mätsystemets huvuddrag framgår av figur 2. Digitalvoltmetern har en avläsningstid på minst 200 milli sekunder, och stansen har en högsta stansfrekvens på 75 tecken per sekund. Datatransmissionsenheten medger betydligt högre hastigheter. Flaskhalsen i transmissionshastighet ligger därför hos digitalvoltmetern.
Mäthjulet
Triggning av mätsystemet sker med permanentmagneter anordnade i jämn delning nära mäthjulets periferi. Dessa påverkar två magnet- strömställare placerade fasförskjutna en halv delning, så att an talet triggningar per varv hos mäthjulet blir lika med dubbla an talet magneter. Avståndet mellan två triggningar utefter periferin blir med den nuvarande anordningen 17,1 mm. Detta motsvarar omkring 200 avläsningar på en körbanebredd, vilket med optimal avläsnings- hastighet på fem avläsningar per sekund kräver ca 40 sekunder. Om balksystemet vid profilering förflyttas för hand, är det icke möj ligt att förvänta sig optimal hastighet. Man skulle alltför lätt överskrida det tillåtna intervallet på 200 millisekunder mellan av läsningarna. Mätpunkten blir då icke registrerad. En mera realistisk mättid vid handdrift är därför en å två minuter. En jämnare rörelse
skulle erhållas genom installation av automatisk drift av armsystem et, varvid mäthjulet kunde drivas av en elektrisk motor monterad direkt på dess gaffel. En mättid betydligt närmare den optimala skulle därigenom bli möjlig. Systemet måste då förses med en fri- kopplingsanordning, så att det i en nödsituation kan föras till skyddat läge, om t ex oväntad trafik skulle störa mätningen. Detta är en förutsättning för att mätning skall kunna ske på en icke av spärrad väg.
Med de snabbare digitalvoltmetrar, som utkommit på marknaden under senaste tiden skulle mäthastigheten kunna ökas. Man måste då und vika att få så stora vertikala accelerationer, att mäthjulet för lorar kontakten med underlaget. Mäthjulet kan komma att "studsa11 på vägbanan. Följande överläggning belyser dessa förhållanden. Vid hastigheten v och krökningsradien R hos profilen är vertikal-
2
accelerationen v /R. Vid krökningsradier hos vägytan mindre än R bestämmes krökningen hos kännarens rörelsebana av mäthjulets stor lek. Vid accelerationen g * tyngdkraftens acceleration blir därför den största tillåtna hastigheten v = /rg, där r är mäthjulets radie. Sättes mäthjulets radie = 0,05 m, blir v - 0,7 m/sek. Tidsinter- vallet 0,2 sek mellan avläsningar på ett avstånd av 17,08 mm mot
svarar 85,4 mm/sek. Här finns alltså god marginal, men å andra sidan ger diskontinuerliga ojämnheter plötsliga förändringar av hastigheten, vilket motsvarar mycket höga accelerationer. För att neutralisera sådana diskontinuiteter har mäthjulet försetts med en VTI. Rapport Nr 22
dämpande gummibeläggning längs periferin, f n utförd genom ett an tal O-ringar liggande i lämpligt utformade spår.
Datorbearbetning
Varje datasekvens (profil) börjar med en diarierad och slutar med en sifferkonstant. Dessa lägges in för hand med hjälp av tecken givaren. Sifferkonstanten anger att datasekvensen är slut. Dator programmet, som är skrivet i Basic Fortran, instruerar datorn att kopiera diarieraden och läsa in alla följande tal utom den av
slutande sifferkonstanten som en vektor. Datorn lägger därefter in en rät linje mellan första och sista mätpunkten och beräknar storleken av alla vertikalkoordinater relativt till denna räta linje. Första och sista koordinatvärdet på varje profil blir däri genom noll. Eftersom mäthjulet rullar på profilen, motsvarar profildelningen (17,08 mm) längden av ett profilsegment, och horisontalinkrementet erhålles ur den rätvinkliga triangel, vars ena katet är lika med inkrementet i profilhöjd, och vars hypo tenuse är 17,08 mm. Genom ackumulering av de horisontella in- krementen beräknar datorn horisontalkoordinaten för varje punkt på profilen. Vidare beräknar datorn profilens medelhöjd och
standardavvikelsen kring denna.
Mätningarna syftar i allmänhet till bestämning av i första hand spårdjup. I normalfallet antages därför att profilen har två mini ma dvs spåren, och däremellan ett maximum. Maximet bör ligga någonstanst i närheten av profilens mittpunkt, varför datorn börjar med att uppsöka mittpunkten och därefter den lägsta punk ten i vardera halvan. Därefter uppsökes den högsta punkten mellan dessa två lägsta punkter. Räta linjer inlägges sedan från maxi- mipunkten till profilens ändpunkter, och minimipunkternas verti kala avstånd från respektive linje rapporteras som spårdjup. Geometrin framgår närmare av fig 3. Datorn rapporterar för varje profil medelprofilhöjden, standardavvikelsen kring denna, de två spårdjupen, maximets höjd, profilbredden samt koordinaterna för första och andra minimum samt maximum. Datorprogrammet för denna enkla bearbetning visas i figur 4. I verkligheten är trafiken ofta osymmetriskt fördelad över vägbredden, så att maximipunkten ligger långt från mittpunkten. Det kan då hända att mittpunkten ligger så nära den ena minimipunkten att koordinaten där är mindre
än vid den andra minimipunkten. Datorn uppfattar då mittpunkten som minimum. Eftersom inget maximum finns mellan denna punkt och det andra minimet, kommer mittpunkten också att registreras som maximum. För att kompensera för detta har programmet kompletterats med en rutin, som undersöker, om minimipunkten sammanfaller med mittpunkten. I så fall flyttas delningspunkten stegvis från mitt punkten, tills minimipunkten inträffar på annat ställe. Detta ut vidgade program visas i figur 5. Testet sker på rad 69 och 70 i programmet, som återföres till någondera av raderna 40 eller 43 för stegvis förskjutning av delningspunkten.
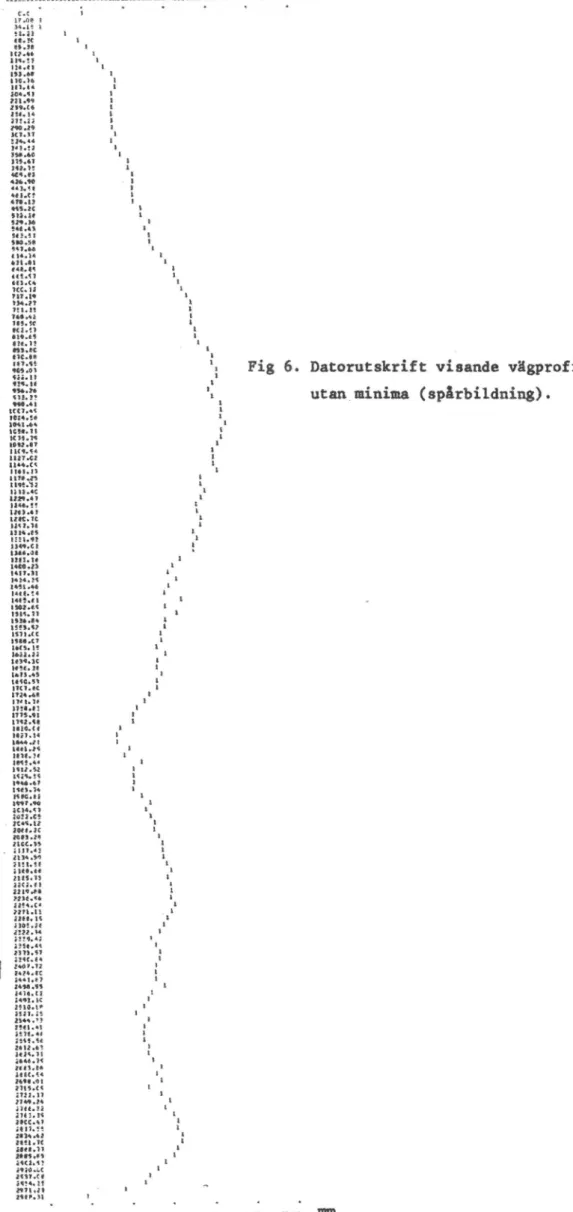
Programmet har fortfarande den bristen, att om någon av ändpunk terna ligger lägre än närmaste minimum, så registreras ändpunkten som minimum. Detta inträffar speciellt på lappade eller överlagda vägar, där vägkanten ligger lågt. I sådana fall har det emeller tid befunnits leda för långt att genom programmet omhändertaga alla tänkbara alternativ. I stället har plottningsrutinen till kallats, så att man vid lägsta värde hos någon av ändpunkterna får hela profilen plottad på utskriftsorganet. Testningen för detta utföres på raderna 91 och 92.
Ett exempel på tvärprofil uppritad på detta sätt visas i figur 6. I detta fall var körbanan endast 2,5 meter bred, och vägen som var belagd med oljegrus hade fått en ny oljegrusläggning över nästan hela vägens bredd. Kanterna kom därigenom att ligga lägre än vägbanan i övrigt, och villkoret på rad 91 har bringat datorn att plotta hela profilen. Den vänstra sifferkolumnen anger bredd- koordinaten i mm, och höjdskalan (här horisontell) är 1 mm för varje skalmärke. Kostnaderna för datorbearbetningen har på hittills bearbetat material varit omkring 2 kr per profil, beroende på om plottning sker eller inte.
Drifterfarenheter
BIFROST har f n (dec 1972) varit i drift under två mätsäsonger* Mätningarna har huvudsakligen utförts på provvägar avseende studi er av olika åtgärder för förbättring av vägars bärighet (under- grundsstabilisering, olika slag av bundna bärlager, HB-överbygg- nader med tjälhämmande skikt etc). I enstaka fall, där problemet varit markerade tvärsprickor, har mätaren använts för längspro- filering.
Mätningar har utförts både 1 varm väderlek under sommaren och nära fryspunkten under senhösten. Vid låga temperaturer fungerar icke dataloggningen, utan apparaturen måste under drift förvaras inuti uppvärmt dragfordon. Om fordonet och apparaturen stått parkerade
i icke uppvärmd lokal under natten, måste fordonet uppvärmas någon timme, innan mätningarna kan påbörjas. På öppna fält har man haft problem med styrning av balksystemet vid hög vindstyrka. Systemets vindfång är så stort att man ibland har svårigheter att föra det med handkraft. Det har befunnits viktigt att mätdonets inre delar
skyddas från fuktighet. Tiden för överföring från transportläge till mätläge är ett par minuter. Mättiden räknat från transport läge till transportläge är 10 min. Hittills har körbanan närmast kring mätstället avspärrats under mätningen.
B
Fig 1. Balksysterets geometri
A: balksystemets upphSngningspunkt
C: mätpunkten
K O N -
TROLL
ENHET
DIGITAL
VOLT
METER
= ] _ jI
N A T
2 2 0 V
N A T
-D E L
DTU = D A T A T R A N S M IS S I O N S E N H E T
QJ *< m ni
rt CL ft ft ft PT ft >1 H* 09 pr &S P Å R D J U P
0 1MENS I ON Y ( 3 0 0 ) # X< 300)> D E L T A ( 3 0 0 ) » M T P L T S (20 > + # V ( 3 0 0 )#Z(3 0 0 ) S * 1 7 . 0 8 3 C O N T I N U E R E A D C 5 , I 0 J M T P L T S W R 1 TE C 6# 9 5 M T P L T S 9 F O R M A T < / / / 2 0 A 4 > JO F O R M A T ( 2 0 A 4 ) DO 30 1 = W 3 0 0 READ? 5*1 1 ) Y < I ) IF C Y U ) - 3 0 Q . > 2 0 * 4 0 * 4 0 F l g 4 30 C O N T I N U E Fortranprogram för analys 40 M = N - 1 av tvärprofilen DO 31 I = 1 #M D E L T A ( I >» S O R T ( S * S - ( Y ( I * 1 > - Y < l > )**2> XC 1 >=>G X < I 1 > = XCI >+D E L T A < I > 31 C O N T I N U E W R I T E C 6 * I 2 )N 12 F O R M A T <1X * ' A N T A L V Ä R D E N * *110) 11 F O R M A T C F S . 1) DO 77 1 = 1 *N 77 ZCI> = Y < I > - Y C I > - ( Y C N ) - Y < '> > * X < I l / X C N ) DO 60 I = 1 * N 60 V < I ) = Z ( I > N H = N / 2 N K E = N H + 1 A M I N = V ( I ) NUN=1 DO 62 I
- 2 s
NH 1F (V ( I ) - A M I N )61 »62* 62 61 A M I N = V ( I ) NUN= I 62 C O N T I N U E V M I N 1 = A M I N A M I N = V <NHE> M U M = N H E N H T * N H E + I DO 64 I = NHTr
N IF <V ( I l - A M I N > 6 3 * 6 3 * 6 4 63 A M I N = V (1) M U M = I 64 C O N T I N U E V M I N 2 = A M I N A M A X = V < N U N > DO 71 I=NUN* M U M IF<V C I J - A M A X ) 7 1 * 72# 72 72 A M A X = V ( I ) M A X = I 71 C O N T I N U E S U M = 0 S U M 2 = 0 DO 78 I * 1# N S U M = S U M + Z C I ) 7 8 S U M 2 = S U M 2 + Z < I > * Z ( I ) S U * S U M / F L O A T (N ) S 2 = ( S U M 2 - S U M * S U M / F L 0 A T ( N ) > / F L O A T < N ) S I 6 M = S Q R T <S2 > W R I T E < 6 , 8 0 ) S U , S I G M 80 F O R M A T C ' M E D E L t'AL * *3X* FI 0# 1 # 3Xj> * S T A N D A R D A V V I K E L S E ' * F I 0» 1 > W R I T E ( 6 # 8 1 ) X ( N U N >j V C N U N )* X ( M U M )# V ( M U M ) X ( M A X ) * V ( M A X ) 81 F O R M A T < ' F Ö R S T A M I N *,3 X # F 8 . 1 * F 8 . l / ' A N D R A M I N % 4 X , F 8 . t * F 8 . 1 / ♦ ' M A X ' , 1 0 X , F 8 . 1 » F 8 . 1) W R I T E ( 6 # 8 2 ) X < N > 82 F O R M A T C * P R O F I L B R E D D ' # 2 X* F 8 » S > 5 1 * -V < N U N )♦ X < N U N )* V ( M A X ) / X ( M A X ) 52 = - V ( M U M }♦ V ( M A X ) * < X < N ) - X ( M U M > ) / ( X ( N ) - X ( M A X ) ) W R I T E ( 6 , 8 3 ) S W S 2 83 F O R M A T <'S P Å R D J U P '* S X # F 8 .1 * 5 X , F 8 .1) GO TO 3 E N D / D A T A♦ER TUR / O I S NYPROP OOOI D I M E N S I O N Y ( 3 0 0 ) # X C 3 0 0 )# D E L T A ( 3 0 0 ) # M T P L T S ! 2 0 ) 0002 + # V ! 3 0 0 ) # Z ! 3 0 0 ) # C ( 6 0 0 ) 00 0 3 S* 17 » 0 8 0 0 0 4 3 C O N T I N U E 0 0 0 5 R E A D ! 5 # l O I M T P L T S 0 00 6 W R I T E ! 6 # 9 ) M T P L T S 0007 9 F O R M A T C / / / 4 X # 1 9 A 4 > 0 00 8 10 F O R M A T C 2 0 A 4 ) 00 0 9 DO 30 1 ^ 1 » 3 0 0 0 0 1 0 R E A D ! 5 # 1 1 ) Y < I ) 0011 l F ! Y ! l > - 3 0 0 » > 2 0 # 4 0 # 4 9 0 0 12 2 0 N* I 00 1 3 30 C O N T I N U E 0 0 1 4 WR IT EC6 # 4 5 )
0 0 1 5 45 F0RMATC2X# *MER ÅN 3 0 0 WARDEN*) 0 01 6 60 TO 3 0017 49 W R I T E < 6 # 4 8 ) 001 8 00 1 9 48 F0RMATC2X# * S L U T V Ä R D E T ST Ö R R E AN 3 0 0 0 * > 60 TO 3 Pig 5 0 0 2 0 0021 40 M*N-1 DO 31 I * i # M Programmet i fig 4 ut 00 2 2 I F ( S # S - ! Y ! 1 + 1 ) * Y U > ) # # 2 ) 4 2 # 4 1 # 4 t vecklat för profiler 1 0023 42 W R I T E ( 6 # 4 3 ) 1 6 0 2 4 43 F 0 H M A T ! 2 X # * D E L T A - Y S TÖ R RE AN S V I O ! * f * ! 3 > *0025 GO TO 3 stark asymmetri. 0 0 2 6 41 D E L T A ! I > * S U R T ! S * S - ! Y < I # l > - Y C ! > > * * 2 > 0027 XC I ) * 0 0 0 2 8 X < I * 1 ) * X ( I ) ♦ D E L T A ! I ) 0 02 9 31 C O N T I N U E 0 0 3 0 V R I T E ( 6 # 1 2 ) N 0031 12 FORMAT <1 X# * A N T A L WARDEN*#1 1 0 ) 0 0 3 2 11 F O R M A T ( F S . l ) 0 03 3 DO 77 I s 1#N 0 0 3 4 77 Z ( J ) » Y ! I ) ~ Y C l ) * ( Y < N > * Y ! l ) > # X ! l ) / X ! N ) 0 03 5 DO 60 I * U N 0 0 3 6 60 V U ) * Z < I > 00 37 NM*N/2 0 0 3 8 N H E » N H * t 0 0 3 9 60 TO 69 0 0 4 0 70 NH *NH -1 0041 NHE*NH*1 0 0 4 2 60 TO 69 00 4 3 73 N H » N H * I 0 0 4 4 N H E » N H * i 0 0 4 5 60 TO 69 0 0 4 6 69 A M 1 N = V ( 1> 0047 N U N« 1 0 0 4 8 DO 62 I * 2 # N H 00 4 9 I F C V ! 1 ) * A M I N ) 6 1 # 62# 62 0 0 5 0 61 A M I N * V C I ) 0051 NUN* I 0 05 2 62 C O N T I N U E 0 05 3 V M I N I * A M I N 0 0 5 4 A M lN * V ! N H E > 0 0 5 5 MUM*NHE 0 0 5 6 N H T* NH E *t 0057 DO 64 I * N H T # N 0 0 5 8 I F ( V < I ) - A M I N >63# 63# 64 0 0 5 9 63 A M I N * VC I ) 0 0 6 0 MUM* I 0061 64 C O N T I N U E 00 6 2 V M IN 2* A M IN 0 06 3 AMAX*V!NUN> 0 0 6 4 DO 71 I*NUN#MUM 0 0 6 5 I F C V ! 1 ) - A M A X ) 7 1# 72# 72 0 06 6 72 A M A X * V C I ) 00 6 7 MAX* I 0 0 6 8 71 C O N T I N U E 0 0 6 9 I F ( V M I N I - A M A X ) 9 0 # 70# 9 0 0 0 7 0 90 I F ( V M I N 2- A M A X >9 5# 73# 9 5 0071 95 C O N T I N U E 0 07 2 SUM*0 0 07 3 S U M 2 - 0 0 07 4 DO 78 1 * 1 #N 0 0 7 5 S U M * S U r t* Z ! l> 007 6 78 S U M 2 * S U M 2 * Z ! l ) * 2 ! I > 007 7 S U* S UM / FL O A T < N ) 0 0 7 8 S 2 * ( S U M 2 - S UM #SU M /FL O AT ( N > ) / F L O A T ( N ) 00 7 9 S I G M * S Ö R T ! S 2 ) 0 08 0 W R I T E C6# 8 0 ) S U # S I 6 M 0081 60 FORMAT < ‘ M E D E L T A L *#3 X # F 1 0 » 1 # 3X# * S T A N D A R D A V V I K E L S E * * F 1 0 » 1 ) 00 8 2 W R I T E ! 6# 8 1 > X ( N U N ) # V < N U N ) # X ! M U M > # V ( M U M ) # X ( M A X ) # V ( M A X ) 0083 81 FO RM AT< * F 5 R 5 T A M I N ' # 3 X # F 8 » I # F 8 * 1 / *ANORA M I N * # 4 X # F 8 •1 # F 8 * 1/ 0 0 8 4 ♦ *MAX* # 1 0 X # F 8 » 1 # F 8 . 1 ) 0 0 8 5 W R I T E ( 6 # 8 2 ) X ( N ) 0 0 8 6 82 FORMAT < * P R O F1L 8 R E 0 D ' # 2 X# F 8 . 1 > 0087 S l « - V ( N U N > + X ( N U t N > * V < M A X ) / X ! M A X > 0 0 8 8 $ 2 * « V ! M U M > # V ! M A X > # ! X < N > - X ! M U M > > / C X ! N > - X C M A X > > 0 08 9 W R I T E (6 # 8 3 > S 1#S2 0 09 0 83 FO R M A T( * S P AR DJ UP * # 5X# F 8 »1# 5X# F 8 . I ) 0091 I F ! N U N - t ) 9 4 # 9 2 # 9 4 0 09 2 94 I F ! M U M - N ) 9 7 # 9 2 # 9 7 0 09 3 97 60 TO 3 0 09 4 92 C O N T I N U E 0 0 9 5 DO 96 I * 1# N 0 0 9 6 C ! 1 ) * X ! 1 ) 0097 K * I # N 0 0 9 8 9 6 C ( K ) * V C l ) 00 9 9 C A L L P L O T ( 1 # C # N # 2 # N # 0 ) 0 1 0 0 60 TO 3 0101 END *EH TUR
Fig 6. Datorutskrift visande vägprofil utan minima (spårbildning).
Figur 7. BIFROST sedd från körriktningen. Den vita linjen är profil spåret.
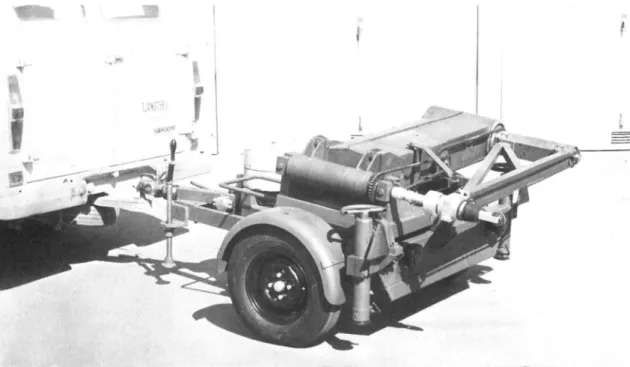
Figur 9. BIFROST i körläge. Under transport skyddas den upp- fällbara delen i själva verket av en plasthuv. (Detta foto togs i ett utvecklingsstadium då stödbenen icke var försedda med hydraulisk manövrering).