å sege r vas a. *, -g S X l i d e 12 |4 ui .q . j ä v e l 3 " S t V e e k o p c h 1 L s t l e g -T a n 10% F e t d i ä e : %. la w S k föl dä r ärklar 77 s 403) Kur der 3 acts det ä. T V Å ? ? ? # i s f St l der -Så säl j se le till 4 ä o ke t. S i e P in kS e U s 2 t d e E k t -F d nd er So ft s l e t e & 90 . w u ä k s s M F Ä V ä & he st o t R x s + 2 8 % vå t 2 4 * fl m. 5 0 f mm: /.. ).. S t SV S R A 2 0 -S o t i e 6 " g de FS i a j_; kr a t sve & Hi dls PioR e t Fa le äe * Sri gel ku s > 3all, £ $ S &V i-egto kt li en k S u s 2 k r t k i t 0 f t s .u wu mu uu un t S -H e e i tF oss a ae kAr ss haf i o . J u w n w 2 | " v o m n å g a . # se (v r-w E L ö s o i t 1 t e -S i e e f e n o t ar a l e a i 3 .N F , 'A . 2 2 3 p n ä m -5 0 2 2 2 q ö s e g , ' b i g att t de 3 0 0 S k e H k P 0 el leF P % S it % Pe er SF i s vä lt S F L o s i 0 0 20 00 5 £ 2 0 % . 4 b ö S g t V e l g s e l x f l l d e e u ru m: ..Sä g. 15% f $ Sök e d i e e e 3 S F r k rd ä 5 2 $ l 3 E s f n rS S T
Nr 300 ° 1983 Statens väg- och trafikinstitut (VTI) - 581 01 Linköping
'ISSN 0347-6049 Swedish Road and Traffic Research Institute - S-581 01 Linköping - Sweden
Trafiksäkerhet på spåriga vägar
Simulering i dator av fordonsrörelser
INNEHÅLLSFÖRTECKNING FÖRORD REFERAT ABSTRACT SAMMANFATTNING SUMMARY 1 BAKGRUND
2 SYFTE OCH AVGRANSNING
3
SYNPUNKTEREVÅMETODEN
4 DATORPROGRAM. IN- OCH UTDATA 4.1 Indata 4.1.1 Indata för simuleringskontroll 4.1.2 Fordonsdata 4.1.3 Däck- och friktionsdata 4.1.4 Manövertyper 4.1.5 Data för spårutseende
4.1.6 Fordonshastighet och fordonsposition vid simuleringens början 4.2 Utdata - presentation och tolkning
5 RESULTAT
5.1 Manöver "N" (sidoförflyttningen 4,2 m längs en
sträcka av 180 m) och konstant hastighet av 90 km/h
5.2 Manöver "A" (sidoförflyttningen 4,2 m längs en
sträcka av 130 m) och konstant fordonshastlghet av 90 km/h
5.3 Manöver "B" (sidoförflyttningen 4,2 m längs en
sträcka av 110 m) och konstant fordonshastlghet av 90 km/h
5.4 Manöver "C" (sidoförflyttningen 4,2 m längs en
sträcka av 90 m) och konstant fordonshastlghet av 90 km/h
VTI MEDDELANDE 300
22
II III -P -r -O O O N M K n k n -P p. .. kn h . U1 16 17 17INNEHÅLLSFÖRTECKNING (forts)
5.5 Manöver "A" (sidoförflyttningen 4,2 m längs en
sträcka av 130 m) i kombination med inbromsning
6 DISKUSSION OCH SLUTSATSER
7 FORTSATT FoU REFERENSER BILAGA 1-3 VTI MEDDELANDE 300 Sid 18 20 22 23
FÖRORD
Denna undersökning har utarbetats inom trafikavdelningen vid statens väg-och trafikinstitut.
Projektet har planerats och genomförts i samråd med Gunnar Carlsson, VTI och Per-Gunnar Land, vägverket. Däck- och fordonsdata har tagits fram av Staffan Nordmark, VTI. Gudrun Öberg, VTI, har bidragit med friktionsdata.
Vid programmeringsarbetet har Håkan Lager, VTI, bistått med goda råd.
Per-Gunnar Land, vägverket, har testat de fordonsmanövrer som simulerats och lämnat många värdefulla synpunkter. Manuskriptet har skrivits ut av Anders Karlsson, VTI.
Till alla som bidragit vid projektets genomförande riktas ett varmt tack.
Rein Schandersson
Trafiksäkerhet på spåriga vägar. Simulering i dator av fordonsrörelser. av Rein Schandersson
Statens väg- och trafikinstitut (VTI) 581 01 LINKÖPING
REFERAT
Projektets syfte var att undersöka betydelsen av belagda vägars spärdjup för trafiksäkerheten när friktionen är låg. En fordonsdynamisk modell
utnytt-jades för att i dator simulera fordonsrörelser pâ vägar med spårbildning.
Undersökningen visar att spårdjupet även vid vinterväglag kan ha betydelse för trafiksäkerheten. Resultaten ger dock inte tillräckligt underlag för att bestämma gränsvärden för spårdjupet med hänsyn till trafiksäkerheten.
Resultaten är osäkra dels på grund av att relativt få simuleringar gjorts,
dels därför att ingen hänsyn tagits tili förarens beteende. Möjligheterna att använda VTIs körsimulator för att belysa trafiksäkerhetsproblemen på
spåriga vägar bör därför undersökas.
Projektet genomfördes på uppdrag av vägverket.
II_
Traffic Safety on Roads with Wheel Ruts Computer Simulations of Vehicle Movements. by Rein Schandersson
Swedish Road and Traffic Research Institute (VTI) 5-581 01 LINKÖPING
Sweden
ABSTRACT
The purpose of the project was to investigate the effects of rut depth on traffic safety for low friction conditions. Aqua planing problems were not treated. A computerized model of vehicle dynamics was used to simulate
vehicle movements on roads with ruts.
The investigation shows that rut depth can be of importance for traffic safety when roads are covered with ice or snow. However the results are not a sufficient basis to decide the limits for rut depth with regard to traffic safety.
The results are somewhat uncertain, partly because comparativer few simulations have been made and partly because driver reactions have not been taken into account. Therefore, the possibilities to use the VTI driving simulator ought to be investigated.
The project was carried through on commission by the Swedish Road
Administration.
III
Trafiksäkerhet på spåriga vägar.
Simulering i dator av fordonsrörelser.
av Rein Schandersson
Statens väg- och trafikinstitut (VTI) 581 01 LINKÖPING
SAMMANFATTNING
Spår i belagda vägars slitlager kan inverka menligt på trafiksäkerhet och framkomlighet. Spåren ökar risken för vattenplaning och dessutom kan de öka svårigheterna att manövrera fordonet vid halt väglag. Kunskapen om trafiksäkerheten på spåriga vägar är ofullständig. Kunskapen kan ökas dels genom direkta metoder (t ex olycksanalys), dels indirekt genom försök, beteendestudier, simulering etc.
I denna undersökning har simulering använts för att undersöka trafiksäker-hetsproblemen på spåriga vägar. Projektet har genomförts på uppdrag av vägverket.
En fordonsdynamisk datormodell användes för att simulera fordonsrörelser på spåriga vägar. Modellen, som kallas HVOSM (Highway-Vehicle-Object-Simulation-Model), togs ursprungligen fram vid Calspan Corporation i USA. Syftet var att undersöka betydelsen av belagdavägars spårdjup för trafik-säkerheten. Undersökningen omfattade endast friktionsförhållanden, som vanligen uppstår vintertid. Vattenplaning undersöktes ej. De använda spårprofilerna var helt jämna och släta. I verkligheten har spår i vägbanor ofta smärre ojämnheter både i längs- och tvärled.
Ett begränsat antal simuleringar av påbörjad omkörning gjordes. Omkörning-ens häftighet, spårdjupet och friktionen varierades, medan fordons- och däcksdata hölls konstanta. I de flesta fall användes konstant hastighet (90
km/h).
Undersökningen visar att spårdjupet även vid vinterväglag kan ha betydelse för trafiksäkerheten. Den ger dock inte tillräckligt underlag för att bestäm-ma eventuella gränsvärden för spårdjup. Resultaten bör ses som en indikation på vad som kan inträffa vid olika spårdjup och friktionsförhållan-VTI MEDDELANDE 300
IV
den, inte som att detta skulle ha inträffat i verkligheten. Det väsentliga i
projektet är de relativa jämförelserna av utfallet av en fordonsmanöver
under olika förhållanden.
En brist i undersökningen är att ingen hänsyn har tagits till förarens beteende. Resultaten indikerar att fordonet börjar sladda vid vissa kombi-nationer av manöver, spårdjup och friktionsförhållanden. Däremot visas inte hur farlig sladden är, d v 5 hur lätt eller svårt föraren har att häva sladden. Resultatens osäkerhet ökas av att relativt få simuleringar gjorts och till detta kommer ett frågetecken beträffande hur väl resultaten speglar verkligheten.
För det fortsatta arbetet med att klarlägga spårbildningens trafiksäkerhets-effekt genom indirekta metoder anges dels att möjligheterna att använda VTIs körsimulator bör undersökas, dels bör trafikstudier göras för att bl a klarlägga om bilister anpassar fordonets sidoläge och hastighet efter spår-bildningen.
Traffic Safety on Road with Wheel Ruts. Computer Simulations of Vehicle Movements. by Rein Schandersson
Swedish Road and Traffic Research Institute (VTI) 5-581 01 LINKÖPING
Sweden
SUMMARY
Ruts on the wearing course of surfaced roads can cause traffic safety problems. The problems include increased risk for aqua planing and manoevering difficulties on slippery roads. The knowledge on these prob-lems is incomplete. Traffic safety on rutted roads can be investigated either by direct methods (eg. accident analysis) or indirectly through experiments, studies of behaviour or simulation. The project was commis-sioned by the Swedish Road Administration.
In this project computer simulation was used to investigate the traffic safety problems on rutted roads.
A computerized model of vehicle dynamics was used to simulate vehicle movements on roads with wheel ruts. The model - HVOSM (Highway Vehicle Object Simulation Model) - was originally developed at Calspan Corporation in the USA.
The purpose was to investigate the effects of rut depth on traffic safety. The investigation only covered friction conditions, which normally arise in the winter. Aqua planing was not investigated. The profiles of the ruts were completely smooth and even. Real ruts are often more uneven.
A limited number of the beginning phase of overtaking were simulated. The rapidity of the manoever, rut depth and friction conditions were varied, while vehicle and tyre data were the same for all simulations. In most of
the cases the speed was kept constant at 90 km/h.
The investigation shows that rut depth can be of importance for traffic safety also when roads are covered with snow or ice. However, the results are not a sufficient basis to decide possible limits for rut depth and should VTI MEDDELANDE 300
VI
be looked upon as an indication of the possible outcome for different rut
depths and friction conditions; not as showing what really would have
happened.
The major uncertainty in the investigation is that driver behaviour has not been taken into account. The results indicate that the vehicle starts skidding for certain combinations of manoever, rut depth and friction
condi-tions. No indication is given of the severeness of the skid. i.e. how easy (or
difficult) it is for the driver to correct the skid. The uncertainty is increased by the fact that comparatively few simulations were made. There is also a certain amount of uncertainty about how well the results pictures reality.
The continued research on traffic safety and wheel ruts is discussed. It is stated that the possibilities to use the VTI driving simulator ought to be looked into. Traffic studies are also necessary to get data both on how drivers adjust the position of the vehicle in relation to the ruts and on possible speed adjustments.
l BAKGRUND
Spår i belagda vägars slitlager kan bildas dels genom dubbslitage, dels genom
att underliggande lager komprimeras och omlagras av trafikens tyngd. Spåren kan på olika sätt inverka menligt på trafiksäkerhet och
framkomlig-het.
Trafiksäkerhetsproblemen vid spåriga vägar har tidigare diskuterats i ett
VTI Meddelande (l). Där anges att problemen är störst vid vått väglag (risk för vattenplaning) och vid vinterväglag (risk för förlorat väggrepp p g a låg
friktion i kombination med stor sidolutning i spårens ytterkanter).
I (1) föreslås också flera olika metoder att studera spårens inverkan på
trafiksäkerheten, bl a:
0 olycksstudier o trafikstudier
0 experimentella studier o datorsimulering
I föreliggande studie har en datoriserad fordonsdynamisk modell använts för att simulera fordonsrörelser vid varierande spårdjup/friktionsförhållanden. Projektet, som genomförts på uppdrag av vägverket, utgör ett komplement till andra projekt som pågår/planeras vid VTI och i vilka andra metoder används för att klargöra problemen förknippade med spårbildning.
2 SYFTE OCH AVGRÃNSNING
Avsikten med projektet har varit att genom datorsimulering undersöka spårdjupets betydelse för fordonskontrollen vid olika manövertyper och
friktionsförhållanden. Det är meningen att resultaten ska ingå i det
underlag som behövs för att vägverket ska kunna bestämma bl a "accep-tabla" gränsvärden för spårbildningen.
' Undersökningen har varit begränsad till friktionsförhâllanden vintertid, men även möjligheterna att under fortsatt FoU simulera körning i vattenfyllda spår berörs.
I projektet har det varit mest angeläget att variera spårdjup, friktionsför-hållanden och manövertyper. På grund av att en variation av ytterligare parametrar medför en snabb ökning av antalet simuleringar, har övriga parametrar hållits konstanta. Detta gäller bl a däck- och fordonsdata.
Ingen hänsyn har tagits till eventuella förarreaktioner, när det simulerade
fordonet börjar tappa väggreppet. Simuleringarna kan därför-med viss
osäkerhet - sägas efterlikna verkligheten endast fram tills detta inträffar.
3 SYNPUNKTER PÅ METODEN
För simuleringarna har ett i USA utvecklat datorprogram - HVOSM (2) -
an-vänts. I programmet görs fordonsdynamiska beräkningar, som möjliggör simulering av ett fordons rörelse i en av användaren bestämd väg- eller
terrängutformning. Vid beräkningarna används inga stokastiska variabler,
d v 5 samma indata till programmet ger alltid samma resultat.
Det är intemöjligt att inom ramen för denna rapport i detalj diskutera den
använda metodens för- och nackdelar. Simulering är ett alternativ till
fullskaleförsök. Jämfört med dessa har simulering den fördelen (förutom lägre kostnader) att ur säkerhetssynpunkt riskabla situationer/fordonsman-övrer kan efterliknas. Nackdelen är att en viss -ibland ganska stor - osä-kerhet alltid kvarstår beträffande i vad mån simulerade resultat överens-stämmer med verkligheten.
Datorprogrammet HVOSM måste sägas vara relativt väl utprovat, eftersom
omfattande valideringar gjorts i USA (2). Programmet har även använts i
ett flertal olika sammanhang. Även vid VTI har modellen tidigare provats (3) och använts (4).
Även om modellen visat sig ge realistiska resultat för den amerikanska bilmodell, som använts vid valideringen, uppstår en viss osäkerhet när andra fordonsdata används. I föreliggande projekt har data för en europeisk "medelbil" från mitten av 1970-talet använts. Dessa data är inte validerade. Till osäkerheterna måste läggas de avgränsningar som nämnts i kapitel 2 ovan - främst att endast ett begränsat antal simuleringar gjorts. Vidare har ingen hänsyn tagits till eventuella förarreaktioner för att t ex korrigera sladdning.
Vid tillämpning av de resultat som projektet gett, är det väsentligt att hålla i minnet de osäkerheter som här omtalats. Resultaten bör ses som en indikation på vad som _k_a_n inträffa vid olika spârdjup och friktionsförhållan-den; inte som att detta skulle ha inträffat under verkliga förhållanden. Det väsentliga i projektet har varit att göra relativa jämförelser av fordonsman-övrer vid olika spârdjup/friktionsförhållanden, inte att bestämma det verk-liga utfallet av en manöver.
#.l
block nr
DATORPROGRAM. IN- OCH UTDATA
Det datorprogram som använts kallas HVOSM (=
Highway-Vehicle-Object-Simulation-Model). Källkoden är skriven i FORTRAN och omfattar c 8 000 satser. Storleken medför att programmet endast kan användas i större datorer. I detta projekt har en IBM 470 vid Stockholms datorcentral (QZ)
använts.
Programmet finns i två versioner-RDZ och VD2*, av vilka den senare
använts. För en översiktlig beskrivning av de olika versionerna samt
modellens användningsområden och begränsningar hänvisas till (4). Mer
detaljerad information ges i originaldokumentationen (2).
I avsnitten 4.1 och 4.2 nedan beskrivs dels vilka indata som använts, dels de utdata som ansetts vara av betydelse för att konstatera "kritiska"
fordons-rörelser på spåriga vägar.
Indata
Indata till datorprogrammet HVOSM ges i olika block. Användaren ger där
följande information: typ av indata
1 Data för kontroll av simuleringen (t ex simulerad tid, tidssteg,
fordonstyp)
Fordonsdata Däckdata
Data för fordonets manöver
Terräng- och vägdata
G N U -P W N
Initialvärden vid simuleringens start (t ex fordonshastighet och position)
I delavsnitten 4.1.l - 4.1.6 nedan anges vilka indata som använts och hur de tagits fram.
* Version VDZ har bl a en bättre modell för att beskriva
friktionsförhållan-den mellan däck och vägbana.
l.1.1.1
4.1.2
l4.1.3
Indata för simuleringskontroll
Vid varje simulering har-beroende på manövertypen-mellan 3 och 8 sekunder verklig tid simulerats. I varje körning har tidssteget 0,01 sek använts. Det innebär att programmet beräknar krafter, position m m för varje hundradels sekund. Ett stort tidssteg innebär sämre noggrannhet. Med hänsyn till de fordonsmanövrer som simulerats måste steget 0,01 sek anses
vara litet.
Det finns möjlighet att i programmet använda olika numeriska metoder för beräkningarna. I detta projekt har den enklaste optionen (Runge-Kuttas metod) använts.
Fordonsdata
Representativa data för en europeisk bil av medelstorlek från mitten av Dessa data anger fordonskarakteristika för en bil Det är Staffan 1970-talet har använts.
med motor fram, drivning bak och med stel bakaxel.
Nordmark, forskningsledare vid VTI, som tagit fram fordonsdata.
Datorprogrammet kräver en detaljerad beskrivning av fordonskarakteristika. Totalt måste värden ges för något hundratal olika fordonsparametrar
(dimensioner, fjärdringsegenskaper, bromssystem, tröghetsmoment m m).
Det skulle leda alltför långt att beskriva dessa här.
Det bör slutligen påpekas att de fordonsdata som använts inte är validerade
(jämför kapitel 3). I ett tidigare projekt (4) gjordes dock jämförande
simuleringar av mycket extrema fordonsrörelser. Endast smärre skillnader i resultaten uppstod då, när dels data för den europeiska medelbilen, dels väl
validerade data för en amerikansk bil användes.
Däck- och friktionsdata
Även för däcken är det forskningsledare Staffan Nordmark, VTI, som tagit fram lämpliga parametervärden. Samma data har använts för fram-VTI MEDDELANDE 300
respektive bakdäck. Data har hämtats från en stor amerikansk undersökning (5) och avser odubbade radialdäck av dimensionen l75SRl4.
Mycket grovt kan konventionella dubbdäck jämfört med sommardäck sägas motsvara en ökning av friktionstalet med c 0,l (jämför referens 6). Givetvis kan även andra parametrar (t ex fjädringsegenskaper, styvhet) skilja mellan
dessa typer av däck. Ingen hänsyn har tagits till sådana eventuella
skillnader.
Vid simuleringarna har fyra olika grundvärden för friktionstalet använts:
0,10, 0,18, 0,30 och 0,75. För att efterlikna verkliga förhållanden, modi- .
fierar programmet dessa grundvärden, så att hänsyn tas till bl a last och hastighet i varje tidsintervall av simuleringen. Vidare tar VDZ-versionen av HVOSM-programmet hänsyn till att friktionen är olika i däckens
längs-respektive tvärled (dens k friktionsellipsen).
I (7) anges följande schablonvärden för friktionstalet vid olika väglag:
friktionstal väglag
0,10-0,15 extremt hal vägbana, underkylt regn
0,2 vintervägbana
0,3 sandad vintervägbana
0,7-0,8 barmark
Mer detaljerade friktionsdata kan hämtas ur t ex (8).
Ovanstående innebär att de simuleringar som gjorts med grundvärdet 0,18
för friktionstalet grovt kan sägas motsvara osandad vintervägbana och
sommardäck Elli mycket hal vägbana och dubbade däck. Simuleringar med grundvärdet 0,3 kan sägar motsvara sandad vintervägbana och sommardäck
eller osandad vintervägbana och dubbade däck.
Slutligen bör här nämnas att friktionen i vägens tvärled varierats. Både låg
friktion i spåren och hög mellan spåren samt hög friktion i spåren och låg mellan dem har använts. Det första fallet har antagits motsvara att
vattensamlingar i spåren har frusit, det andra att vinterväglaget i spåren nötts bort av trafiken.
4.1.4 Manövertyper
En riktlinje vid valet av manövertyp var att den skulle vara av kontrollerad karaktär. Som grundmanöver valdes en planerad väjning (sidoförflyttning),
där fordon flyttar sig 4,2 meter i sidled. Med detta menas att fordonet
förflyttas 4,2 m i tvärled vid körning längs en väg. Manövern kan även
beskrivas som första delen av en "flygande omkörning".
jI
sidoför-flyttning
(='4,2 m)
vägsträckans längd
Om hastigheten och sidoförflyttningens storlek hålls konstanta medan väg-sträckans längd varieras erhålls olika fall. Vägväg-sträckans längd sattes till
följande värden:
Beteckning Längd av vägsträckan på Approximativt
på manövern vilken sidoförflyttningen sidoryck (m/s3)
(4,2 m) görs vid 90 km/h
N M 180 m 0,4
A N 130 m 1,0
B M 110 m 1,5
C A/ 90 m 2,4
Sidorycket, som är förändringen av sidoaccelerationen per tidsenhet, har uppskattats ur diagram som erhållits från vägverket. Sidorycket är ett mått på hur märkbar sidoförflyttningen är. Vägverket använder 0,45 m/s3 som dimensionerande värde (referens 9, avsnitt 3.1.1.04, sid 7). Om detta värde tillämpas på en sidoförflyttning av 4,2 m vid hastigheten 90 km/h finner man att manövern kräver 185m (referens 9, avsnitt 3.1.1.04, sid 8). Detta motsvarar ungefär det fall som betecknats med N ovan.
Simuleringarna omfattar inte fullständiga sidoförflyttningsförlopp. Anled-ningen är begränsningar i indatamöjligheterna för spårens utseende (jämför 4.1.5). Endast högra samt halva vänstra väghalvan har kunnat ges som
indata. Detta innebär att simuleringsresultaten endast är relevanta fram till den tidpunkt då något fordonshjul når längre. till vänster om vägmitten än c'2,0 m, vilket är ungefär detsamma som att hela fordonet passerat vägmit-ten.
De fyra olika manövrerna (N, A, B och C) har testats av P-G Land vid vägverket, som subjektivt beskrivit dem enligt följande;
Manöver Upplevelse
N Manövern ej märkbar
A Manövern knappt märkbar
B Manövern klart märkbar, men upplevdes ändå inte obekväm.
Jämförbar med vårdslös omkörning.
C Manövern mycket märkbar. Upplevdes som obehaglig. Utföres
endast i kritiska situationer, t ex snabbt uppdykande älg. 4.1.5 Data för spårutseende
Grunddata för vägens tvärprofil på spåriga vägar hämtades från mätningar, som gjorts av VTIs trafikant- och fordonsavdelning med hjälp av SAAB RST (= Road Surface Tester). Ett problem var att inga spår djupare än c 25 mm då fanns uppmätta. Till detta kom att någon "typisk" spårprofil inte kunde tas fram ur mätdata på grund av stora variationer i spårutseende. Som grundprofil valdes en uppmätt profil med spårdjupet 2 cm. För att kunna simulera även 4 och 6 mm spårdjup extrapolerades data för 2 cm-profilen.
Tvärfallet sattes till 3 96. Samtliga simuleringar avser rak, horisontell väg med c 7 meters bredd.
I figur 1 nedan visas vägprofilerna för 2, 4 och 6 cm spårdjup. För jämförelser har simuleringar även gjorts för väg utan spårbildning (spår-djup = 0 cm) . Av figuren framgår att endast högra väghalvan har fullstän-dig spårbildning. För vänstra väghalvan kunde endast spåret närmast vägmitten ges som indata. Anledningen till detta är begränsningar i
indatamöjligheterna. För att kunna modellera spårbildningen över hela
VT I ME DD EL AN DE 30 0 [H FT L] G E G H iN UL ) UF *§H Figur 1. U F C H (H TT LI \
\\\\\\äü_ø///
6 Cnnspårdjup
4 cm spårdjup 2 cm spårdjup R M HVST l Y-LED (335.; 025142 3G-'jDLJfD-ZGBJJ-22E3 RD-IBD.50-152.HG-11H.30-78.23 -3E DJ DC] 38. 'LG 76.23 114.30 152.'-13 133.58 228,80 2168.70 '304.50 '342.93
. ' t 1 l l I 1 l 1 L 1 I I CP1) L 'L 1 i r ;153 03-135.33»120.00-Tos.na-92 03 -75.03 -60.03 »H5.03 -30 03 -1S.00 0 15 0: 30 03 qs 03 80 0: 75.00 33.00 105.03 123.03 135 Ca RVST 1 Y-LED (IUM)
TM KÖRBQNH, 37. TVFñRFHLL
Använda spårprofiler för 2, 4 och 6 cm, spårdjup. Olika skalor har använts i horisontal- respektive vertikalled.
10
vägbanan och samtidigt ha olika friktion i respektive mellan spåren krävs
program modifieringar.
4.1.6 Fordonshastighet och fordonsposition vid simuleringens början
Vid samtliga simuleringar sattes fordonets initialhastighet till 90 km/h. I de
flesta fall gjordes sidoförflyttningen med konstant hastighet. Några
simule-ringar i vilka fordonet bromsats har genomförts. Jämfört med konstant hastighet medför givetvis bromsningen att manövern försvåras och risken
för sladd vid halt väglag ökar.
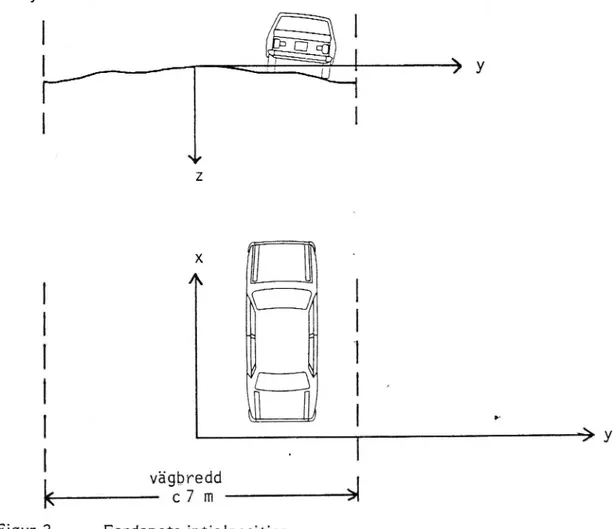
Fordonets initialposition var i samtliga simuleringar på högra väghalvan med högersidans däck i ytterspåret och vänstersidans däck i spåret närmast vägmitten. Figur 2 nedan visar positionen i relation till vägen och
koordi-natsystemet.
I
?5 l
|
> y
l
l
l
2X M
A'
:3 l
I
l
1'
'
l
I
ü '
'
I
r
e) y
ägbredd k V C7 m >JiFigur 2. Fordonets intialposition.
4.2
ll
Utdata - presentation och tolkning
Datorprogrammet HVOSM ger en stor mängd utdata vid varje körning. Den typ av utdata som erhålls har beskrivits i (4) och - mer utförligt -i (2).
Utdata erhålls i form av långa, något svåröverskådliga datalistor. Eftersom endast vissa utdata var av intresse gjordes ett datorprogram, som presente-rar resultaten grafiskt. Av figur 3 nedan framgår vilka utdata som plottats. Av dessa torde främst fordonets rörelser, Sidkrafterna på däcken och eventuell sladdning vara relevanta för att avgöra spårdjupets betydelse vid vinterväglag.
Överst i figur 3 visas schematiskt hur fordonet färdats vid den simulerade manövern. Eftersom terrängdata endast är fullständiga för högra samt halva vänstra väghalvan (jämför avsnitt 4.1.5) ska resultaten inte ska beaktas efter den punkt dåhela fordonet passerat mittlinjen (jämför avsnitt 4.1.4).
Alla data i figur _3 anges i relation både till positionen i vägens längsled och till tiden. Det är längdskalan som är fixerad. Tidsaxelns utseende beror av fordonets hastighet längs vägen.
Under tidsaxeln anges om däcken sladdat eller ej. Förlorat väggrepp anges med "s", annars anges "-". Ett "s" skrivs ut om den maximalt tillgängliga sidkraften mellan däcket och vägbanan har uppnåtts. Om detta inträffar för endast ett däck påverkas inte fordonets kursstabilitet. Om flera däck förlorar väggreppet samtidigt kan fordonet börja sladda.
Vridningsrörelserna (se figur 3) är av mindre intresse. De rörelser som visas är roll, pitch och yaw. Roll är vridningen kring fordonets längsaxel, pitch kring axeln tvärs bilen och yaw är vridningen kring en lodrät axel genom
bilen.
Sidkrafterna anges för varje hjul/däck med olika tecken beroende på riktning. Av figuren går det att utläsa dels när krafterna är störst, dels
skillnader mellan hjulen/däcken.
12
.pmäsmwumwctäsczm >m :0302305 xmzmhw md _wawam .m .Små
2.829 _p>
K.ur "mu4> Equrwm_ c zu_ xnm .Extz mn ;cam Eur .JJULI4> xm ;zumxox Eb
6 nn 7_Iumh .nçuouu .g ,xpdc »aqapnnh .J»MJarmnz xmnuacmau
+ LN ymm_ Oxmum O . 02.294lmmtmm Q.) rmsczcczucz:
.
\ Jxmf Turmmzam
_hou. cz«pm>u _r_m> Iuo _m.mr ..N.L> .___L: ; LnJMJUñI
nu.nr nu mmm nn cum nn nrN nu own nu nu nu orm nu 9 nu nNN nu.u_N nu.uøN nn.nn_ 00.00" nn ah. nu.awø nn,onn nn.ur_ nu om_ nu nu_ nu 0.. nu nu nu nm nn.au un ah nu om un.nm nn4or nu o nn.n 0.0. nn. F I.- L L |.I..- .IzL |.. 'h 5 .u . - L L IL .b . .. p . L L » 2 L kb . '.- . . 'b . _ Jm .cmBud LV-m7). Zl NE ..S .k 3 MB P .I E »MM HM ...IJ 3.... ll 9 H: u: um än, än: nu um W l J Z Hull w» .C .l u F F r _ .hu nu ...114 x.. m.. ...m vw . C.. 0.. .I analI! .duS . :0 no 0 nul. .i nu ( . ll .hl . .§33 rä .2:52 4:35.. 2.235 J P P .I Fl P x'I r br i! hr 5! .r kr r r D F D F: F F P P r D P h_S m 171:!vlIIIIIIIIAYIIlII!lILVllJIII HW.UDCl. f l :nu.nu I/.fr [till . . mñ . / " w . .1 r r ü " 4 m .a .w x < 9 .a .3 c .\ s. Emmmnwmmmmmnmnmmwmmwmmwmwmmnx--- 27.3ch nummnmnmnmmnmmmnmnnnnmmmnnnnn--- 22:3: L>øømmmmnnmmmnnn--- :Eauim . .zwannmwmwmnmn--- E Ä \ Juxumc_p
rä. un." .in nu.. än. nu: .än 8... .in man. in 3.
q A . q 4 4 d
.pcua noLxh_ mznzbzÅCmu214 mzuuc _ zon»_nuL 2
0.000 nn man no nun un n nu ocN nn un nn urN nn uøn nu man nu n_w nu nu un.um. nu nu" no nr_ nu om. nu nu_ nu ur_ nn nn_ nu Om_ nu 0." nu nu nu nn nu nu nu Uh nn.ow nu 0 nu 0 nu 0 nu. nu 0 nu n. u
v 0 o 0 v 0 0 D 0 0 0 0 .r 0 [0 .. v 0 0 0 " .F 4. .. .. 4_ .. .L . .m 1
5.5 nu.: :nu anda ramp Uno.. 42. 0...: nnéc 00+.. mm2.m.hn 1:70:45 »hur man.. han: mer» .55 .annu bron »rån varm nnuuuu. run.. n_.N. ...9 mat ?nn
_n. mch I.7 54
a .HT 3.1
...IIIJ ...'34 0 .x
ra\1L rlIL HU r. .
II..|.I.|||I..I|..|I.||:II lllilu llllllllltllllulllltlrllllosisaliiwxanu
a.0 a. 30; 59.1. ;M .AV 1 rnwv JJ? VT I ME DD EL AN DE 30 0
l3
Normalkrafterna visar hur fordonstyngden fördelas på de olika hjulen.
Diagrammet längst ner i figur 3 visar hjulslip för varje hjul. I detta sammanhang betyder Slip-värdet hur mycket snabbare eller långsammare hjulet roterar i förhållande till den fria rotationshastigheten. Ett negativt värde anger att hjulet är drivande, ett positivt att hjulet bromsar. I figur 3 är bakhjulen drivande medan framhjulen i stort sett rullar fritt (slipvärde
nära 0 96).
Allra längst ned i figuren anges vissa bakgrundsparametrar som identitet på
körningen (BPNRS4C4 i figur 3), datum, spårdjup m m.
När det gäller tolkningen av resultaten måste hänsyn tas till dels de allmänna avgränsningar och synpunkter som nämnts i kapitlen 2 och 3, dels de speciella begränsningar som indata medför (jämför avsnitten 4.1.1 4.1.6). I resultatsammanställningen (kapitel 5) används ett mycket enkelt mått för utvärderingen. Simuleringarna har klassificerats efter i vilken grad däcken förlorat väggreppet under den simulerade manövern. Det kan därför vara på sin plats att närmare förklara vad som i detta sammanhang menas med förlorat väggrepp eller sladd.
Om ett hjul under rullning även tvingas röra sig i sidled uppstår en
reaktionskraft (sidkraft) mellan däck och vägbana. Denna beror till sin
storlek på vinkeln (avdriftsvinkeln) mellan hjulplan och rörelseriktning. Sidkraften är till en början direkt proportionell mot avdriftsvinkeln för att sedan uppnå ett i stort sett konstant värde. Det senare inträffar vid fullt utbildad friktion i hela kontaktytan mellan däck och vägbana.
I datorprogrammet uttrycks Sidkraften med ett tredjegradspolynom av avdriftsvinkeln. Denna funktion växer tills den maximala Sidkraften upp-nåtts. Därefter antas Sidkraften vara konstant. När avdriftsvinkeln blivit så stor att den konstanta, maximala Sidkraften uppnåtts sägs hjulet befinna sig i sladd, vilket av programmet indikeras med ett "3".
Med ledning av uppgifterna om "sladd" för hjulen har simuleringarna klassificerats i någon av följande fyra grupper:
14
o - Alla däck har väggrepp hela tiden
5 - Ett eller flera däck förlorar väggrepp under kortare tid.
ss - Flera hjul förlorar väggreppet samtidigt och under längre tid, men
fordonet är kursstabilt
sss - Alla hjul förlorar väggreppet och fordonet sladdar.
För några simuleringar har det varit svårt att avgöra om de bör tillhöra den tredje eller fjärde av klasserna ovan (ss eller 555). Gränsen mellan dem är
svårdefinierad. Det är inte uteslutet att simuleringar i tredje gruppen hade hamnat i den fjärde om längre tid simulerats.
Det bör observeras att "förarbeteendet" är bestämt på förhand. Inga nya kurskorrigeringar görs om fordonet börjar sladda. I stället fortsätter rattrörelserna som om manövern löpte helt planenligt. Detta är givetvis orealistiskt och förvärrar den uppkomna situationen. Värdet av simuleringen ligger dock inte att konstatera följderna av att fordonet sladdar. Mer intressant är att se under vilka kombinationer av spårdjup, friktionsförhåll-anden och manövertyper som sladd uppstår.
5.1
15
RESULTAT
Resultaten nedan presenteras uppdelade på de olika fordonsmanövrer som simulerats och för vilka data redovisades i avsnitt 4.1.4. Framställningen är översiktlig. Varje simulering har klassificerats i en av fyra grupper (jämför avsnitt 4.2) med hänsyn till väggreppet under den simulerade manövern. I bilagor visas mer detaljerade resultat för några simuleringar, där skillnader kunnat påvisas för olika spårdjup. Övriga simuleringar finns detaljredovisa-de i en promemoria*.
I avsnitt 5.1 - 5.5 görs korta kommentarer till resultaten. En utförligare diskussion lämnas i kapitel 6.
Manöver "N" (sidoförflyttningen 4,2 m längs en sträcka av 180 m) och konstant fordonshastighet av 90 km/h
Fem simuleringar har gjorts av manöver "N". Resultaten från dessa
sammanfattas i tabell i.
Tabell 1. Väggrepp vid simulering av manöver "N" vid konstant hastighet av 90 km/h. "0", "s", "55" och "555" jämte raster av olika täthet används för att beteckna i hur hög grad väggreppet
förlorats (jämför avsnitt l41.2).
Spår-djup
Friktion (mellan spår/i spår)
(cm) 0,75/O,75 0,18/0,18 0,10/0,10
Ei spår
2 o o
4
6 o
När friktion är mycket låg (0,10) förlorar alla däck väggreppet, men detta inträffar redan när vägen saknar spårbildning.
* Schandersson, Rein "Sammanställning av simuleringar i projektet: Spår-bildningens betydelse för trafiksäkerheten; Simulering i dator av fordons beteende." Opublicerad promemoria daterad l983-06-27.
16
Ur resultaten från de utförda simuleringarna av manöver "N" går det inte att dra några slutsatser beträffande spårdjupets betydelse för
fordonskon-trollen.
5.2 Manöver "A" (sidoförflyttningen 4,2 m längs en sträcka av 130 m) och
konstant fordonshastighet av 90 km/h
Resultaten från de 12 simuleringarna av manöver "A" vid konstant fordons-hastighet (90 km/h) sammanfattas i tabell 2. Simuleringar med 0cm
spårdjup (= inga spår) har bedömts som ointressanta eftersom de torde ge
samma resultat som spårdjupet 2 cm.
Tabell 2. Väggrepp vid simulering av manöver "A" vid konstant hastighet . av 90 km/h. "0", "s", "ss" och "355" jämte raster av olika täthet används för att beteckna i hur hög grad väggreppet
förlorats (jämför avsnitt l4.2).
spårdjup
Friktion (mellan spår/i spår)
L (cm)
0,75/o,75
0,75/0,1s 'l 0,13/0,75 l 0,18/0,18
Ej spår ff
2 o o o
AL o i o o
6 . o o o
1) Mer detaljerade resultat i bilaga l
Av tabellen framgår att skillnader endast finns i kolumnen längst till höger (friktionsnivån 0,18 både i och mellan spåren). Vid 2 cm spårdjup behåller alla däck väggreppet hela tiden, medan 4 och 6 cm spårdjup medför ökande grad av förlorat väggrepp. I bilaga 1 detaljredovisas dessa tre simuleringar.
5.3
5.4
17
Manöver "B" (sidoförflyttningen 4,2 m längs en sträcka av 110 m) och konstant fordonshastighet av 90 km/h
Manöver "B" vid konstant fordonshastighet (90 km/h) har simulerats för 14 olika spår- och friktionförhållanden. Resultaten har sammanfattats i
tabell 3.
Tabell 3. Väggrepp vid simulering av manöver "B" vid konstant hastighet
av 90 km/h. "0", "s", "ss" och "555" jämte raster av olika
täthet används för att beteckna i hur hög grad väggreppet
förlorats (jämför avsnitt 4.2).
Spårdjup
Friktion (mellan spår/i spår)
(cm) 0,75/0,75 0,75/0,18 O,l8/0,75 0,18/0,18
Ej spår 535
2 o 0 555
4 o 0 555
6 o 0 553
Av tabellen framgår att spårdjupet inte i märkbar grad inverkat på fordonskontrollen, när manöver "B" simulerats vid :fyra olika friktionsför-hållanden. Smärre skillnader finns mellan olika simuleringar, men de ger ej utslag i det grova mått (förlorat väggrepp) som redovisasfi tabellen.
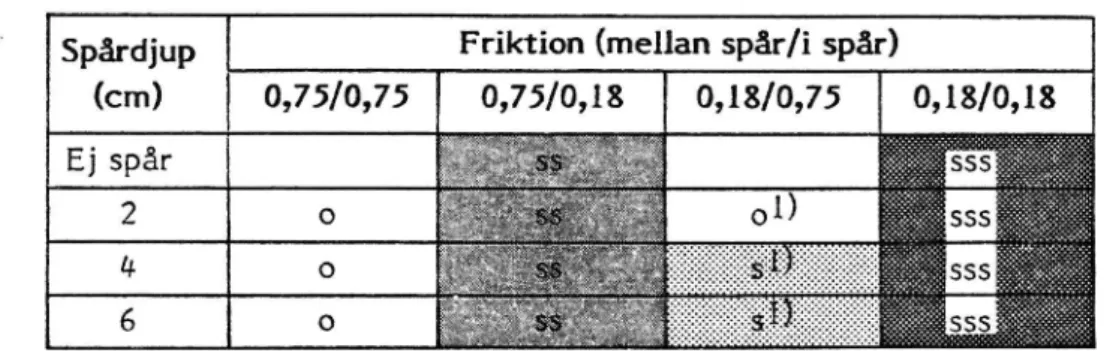
Manöver "C" (sidoförflyttningen 4,2 m längs 'en sträcka av 90 m) och
konstant fordonshastighet av 90 km/h
I tabell 4 sammanfattas resultaten för manöver "C" - totalt 14 simuleringar.
Tabell 4. Väggrepp vid simulering av manöver "C" vid konstant hastighet
av 90 km/h. "0", "s", "ss" och "355" jämte raster av olika täthet betecknar i hur hög grad väggreppet förlorats (jämför avsnitt 4.2).
Spå-djup
Friktion (mellan spår/i spår)
(Cm) O,75/O,75 0,75/0,18 0,18/O,75 (LIS/0,18
Ei Spår
i
i
'i
"
2 o
4
O
... .
6 0 52:55:12:
1) Mer detaljerade resultat i bilaga 2.
För friktionen 0,18 mellan spåren och 0,75 i spåren medför ökande spårdjup att manöver "C" görs med sämre väggrepp. För övriga testade friktionsför-hållanden har inte några markanta skillnader kunnat påvisas.
5.5 Manöver "A" (sidoförflyttningen 4,2 m längs en sträcka av 130 m) i kombination med inbromsning
Tre simuleringar har gjorts av manöver "A" i kombination med relativt
kraftig inbromsning (från 90 till 0 km/h på 120 m). Resultaten
sammanfat-tas i tabell 5.
Tabell 5. Väggrepp vid simulering av manöver "A" under inbromsning
"0", "s", "ss" och "555" jämte raster av olika täthet betecknar i
hur hög grad väggreppet förlorats (jämför avsnitt 4.2).
Spårdjup Friktion (mellan spår/i spår)
(cm)
0,30/o,30
o,3o/0,75
Ej spår
.' sss
5:
"
2
l) Mer detaljerade resultat i bilaga 3.
19
Manöver "A" försvåras givetvis om den görs under inbromsning. Vid
friktionen 0,30 över hela vägbanan råkar fordonet i sladdning under
simule-ringen. Vid friktionen 0,30 resp och 0,75 och 0 cm spårdjup kan manövern genomföras med liten förlust av väggreppet under kort tid medan samma manöver vid 2 cm spår medför att väggreppet förloras i högre grad.
20
6 DISKUSSION OCH SLUTSATSER
Den väsentligaste frågan beträffande resulaten i kapitel 5 och bilagor rör
representativiteten. Hur väl motsvarar den simulerade manövern och dess utfall det som skulle ha inträffat i verkligheten? En följdfråga är hur stor betydelse utfallet av en viss manöver har för trafiksäkerheten.
För att uttömmande besvara den första frågan krävs experimentella studier,
vars resultat kan jämföras med simuleringsresultat. Inom projektet kunde
detta inte göras. Vad som kan göras är att påpeka felkällor samt diskutera deras eventuella inverkan (jämför även kapitlen 2, 3 och 4).
De viktigaste felkällorna torde vara följande: 0 Fordonsdata är ej validerade
o Känslighetsanalyser av däck- och fordonsdatas inverkan på resultatet har ej gjorts.
0 Samma data har använts för fram- respektive bakdäck. 0 Ingen hänsyn har tagits till eventuella förarreaktioner.
0 Spårutseendet är "idealiserat" (saknar t ex ojämnheter i längsled) och för 4 och 6 cm spårdjup har utseendet extrapolerats ur 2 cm-profilen.
o Fordonets sidoläge vid simuleringens början har ej varierats.
0 Endast fordonshastighet (90 km/h) respektive inbromsning från 90 km/h i kombination med en "ofullständig" (jämför avsnitt 4.1.4) sidoförflyttning
har testats.
Den största av felkällorna är sannolikt att ingen hänsyn tagits till hur
föraren reagerar.. När ett fordon får sladd i verkligheten gör föraren något.
I det ideala fallet frikopplar han och korrigerar fordonsrörelsen med styrning. I de simuleringar som gjorts fortsätter "föraren" rattrörelsen som om den planerade manövern avlöpte normalt. Detta förvärrar den uppkomna situationen. För simuleringarna blir konsekvensen att resultaten är miss--visande efter den tidpunkt då fordonet börjar sladda.
Det återstående värdet av simuleringsresultaten är dock att de indikerar under vilka förhållanden sladd kan inträffa. Övriga felkällor ovan inverkar
21
dock, särskilt som relativt få simuleringar gjorts. Givetvis hade säkrare slutsatser kunnat dras ju mer t ex fordons-, däcks-, hastighetsdata varieras.
Inverkan av att samma data har använts för fram- och bakdäck, liksom det
"idealiserade" spårutseendet har sannolikt ganska liten betydelse för
resulta-ten.
Sidoläget vid varje simulerings början kan däremot ha haft viss betydelse för resultaten vid olika spårdjup. Om fler simuleringar genomförts för varje
spårdjup och sidoläget varierats medan övriga indata hållits konstanta hade
säkrare relativa jämförelser kunnat göras.
Med hänsyn till synpunkterna ovan blir den sammanfattande slutsatsen av resultaten i kapitel 5 att spårdjupet kan_ inverka på kontrollen av fordonet
om vägbanan har låg friktion. Det går däremot illa att påstå att utfallet av
den simulerade manövern överensstämmer med vad som skulle ha hänt i verkligheten. Svagheterna i metoden, bristerna i indata och det begränsade antalet simuleringar medger inte att en sådan slutsats dras.
När det gäller den nivå, vid vilket spårdjupet blir betydelsefullt, kan inte några definitiva slutsatser dras ur materialet. Olika manövertyper i kombination med olika friktionsförhållanden visar olika "gränser". Resulta-ten antyder att trafiksäkerhetseffekterna ökar med ökande spårdjup.
Slutligen måste ytterligare några synpunkter lämnas, som berör de inledande frågeställningarna i kapitlet. Kunskaperna om i vilken utsträckning
trafi-kanten anpassar sitt körsätt efter vägens spårbildning är mycket bristfällig.
Det kan inte uteslutas att trafikanterna undviker att köra i spåren, om de är fyllda med is eller vatten. Det är även möjligt att man undviker sidoför-flyttningar av den typ som simulerats (flygande omkörning).
För att ha en möjlighet att med indirekta metoder kvantifiera trafiksäker-hetseffekten av spåriga vägar måste trafikstudier göras. Dessa bör omfatta hur fordon framförs i förhållande till spåren, om omkörningar och dylikt sker
i mindre omfattning på spåriga vägar jämfört med vägar utan spår samt
hastighetsmätningar. Sannolikt påverkas körbeteendet även av friktionsför-hållanden och vägbanans utseende. Därför bör trafikstudierna göras under olika yttre förhållanden.
22
7 FORTSATT FoU
En möjlighet att ta hänsyn till förarbeteendet vid simulering av
fordons-rörelser på spåriga vägar är att utnyttja den fordonsimulator, som utveck-lats vid VTIs trafikant- och fordonsavdelning. Med hjälp av simulatorn kan dels studeras hur försökspersoner reagerar när något oväntat (t ex sladd) inträffar vid en manöver, dels kan simulatorförsök ge en uppfattning om var försökspersoner väljer att föra fram fordonet i relation till spåren.
Möjligheterna att använda fordonsimulatorn har diskuterats med trafikant-och fordonsavdelningen. Några modifieringar av bla programvaran fordras
troligen för att simulera körning på spåriga vägar. Vidare måste behovet av
validering undersökas. Därför föreslås att ett planprojekt genomförs där man närmare studerar de svårigheter, som kan uppstå och hur dessa kan lösas. Ett sådant planprojekt bör vara av storleksordningen 50 tkr för att ge tillräcklig information. Planprojektet skulle då även omfatta möjligheterna att studera risken för vattenplaning vid körning på vägar med vattenfyllda spår. För dessa förhållanden tillkommer ytterligare svårigheter. Det gäller bl a att ta hänsyn till att vattendjupet (och därmed friktionen) är olika för fram- respektive bakhjul. Vidare måste rimliga simulerade manövrer testas, eftersom effekten av vattenplaning inte märks förrän föraren försöker ändra
kurs eller bromsa.
Även om man genom simulatorstudier kan konstatera ,vid vilka manövrer trafiksäkerhetsrisken uppstår på grund av spår i vägbanan, torde det vara
nödvändigt att genomföra trafikstudier. Genom sådana kan data erhållas om
sidolägen, omkörningsfrekvens, hastigheter m m vid olika väglagsförhållan-den. Utan denna information torde det vara svårt att genom indirekta
metoder kvantifiera de trafiksäkerhetsrisker, som simulatorexperimenten kan indikera.
23
REFERENSER (1) Carlsson Gunnar
"Spårbildningens inverkan på trafikens säkerhet. Planprojekt."
Statens väg- och trafikinstitut
Meddelande nr 139, Linköping, 1979
(2) Segal, D J
"Highway-Vehicle-Object-Simulation-Model, Vol 1 - Vol 4". Federal Highway Administration
Report no FHWA-RD-76-162, -163, -164 och -165, 1976, Washington,
D.C., USA
(3) Schandersson Rein
"Avkörningsolyckor och vägens sidoutrymme. Etapp 3 - olyckskostnader samt beräkning av olycksrisker och olyckskostnader för objekt i
sidout-rymmet."
Statens väg- och trafikinstitut
Rapport, nr 185, Linköping, 1979.
(4) Schandersson Rein
"Trafiksäkerhet vid avkörning i vägens sidoutrym me. Utvärdering av olika sidoutrymmessektioner genom simulering i dator."
Statens väg- och trafikinstitut Rapport nr 203, Linköping, 1980.
(5) "Tire Parametre Determination. Volumes I-IX." US DOT HS-802 088.
National Highway Traffic Safety Administration, Washington D.C., USA.
(6) Ohlsson Evert
"Vinterdäcks väggrepp".
Statens väg- och trafikinstitut Rapport nr 65, Linköping, 1975.
(7) Vägverket
"Underlag för driftplaneringen. 3. Effekter. Service- och underhållsåt-gärderü'
Planeringsavdelningen, P017 Borlänge, 1983-03.
(8) Öberg Gudrun
"Friktion och reshastighet på vägar med olika vinterväghållning". Statens väg- och trafikinstitut
Rapport nr 218, Linköping, 1981. VTI MEDDELANDE 300
24 (9) Vägverket "Trafikleder på landsbygd". Tekniska avdelningen, TV 124 Borlänge, 1981-11. VTI MEDDELANDE 300
Bilaga 1
Sid 1(4)
Bilaga 1
Simuleringsresultat för manöver "A" vid konstant hastighet av 90 km/h,
friktionen 0,18 och 2, 4 respektive 6 cm spârdjup.
Bi la ga 1 Si d 2( 4) 259mm? Mh>
.\ / .mu{> agmfwm_ G Zøawxnmu .Exit Om atlm :um Aqqukrl r \m .azumrnx En
7_mmmh_ .nyonwu .u .rama »m4uwunh .JMGJUECUZ xmuumomsw
xumu.oxxønu D . mznmu2(4uxzn>m »m i NO> >G han»
+
0
K
açwm
.wou. chwm>c Fr.m :nu .m_mr ._N_L> ._ø_mr 1 LWJMJDWI.
Tammmzmm
| -C l M ' J '
un.n nu 0 nu n nu "FN HH mmm nu www nn u nu H 0 nu n nu HAN nu MHN un un_ nu nu nu UP_ nu Om. nu nu un ur_ nn UF_ nu Nu ud nu_ nu Unn uu. un UAH nu Om nn.nn un, nn.0 Hu U 0.0 nn
FLIL LiIIL LL _ ._ilL Lllh LL L- LLIL L L [ [L L LL bl'lh bb L [.NHUS q!
// JMWHHNHHHHHMH 3,;
?m M75IUVll\LW\I/\WUKMW1/d\ \ÅAWX U\h HUWHVh »U/JW D HHHHMWÅ UV\\IÃWHU ÅHU h_ud
.I N L ? KW nu...U . .a . #0 .i .IN MÅ .3 .nu .nu nu .6.1 nvqi .hl nu ll Mzum nu|5|1 ...I :I il .hal mnw ang 5)-nulrt nu |\
nr_ü> two .m_ut ._N.L ....mz | cpwucnaü_m N
.I .I P P r F r » P b, hl P P r b -.1 SU._H S .51.4 AU LI. Gm 7.! palmr. 3.. i.. nu. i am hlGC nU'I || c[gtc
.W.]Ur ?uu N_IUF_Q Ä.__44cc 2.20nu ]
r P P r hr F F P br br P r r br r P #1 P Fl r .;....u NU Cnu 14-...i »J :v k\ xw< M b4 0 Nu (I nu 1.5
u |||| I|||||| |o Aut|||t|I||l|l||||h9||||t|l..|i||lI||||ll||||||l|||||v|| nbni_üüüan
14|-||z'i|å|-||\--||-|--||--||-||l|-.||O||||l-|-'|§l|lll|l| x
.r.|||||||||||OIsvis||ll||||||l|l'||||llOltltlaltllillllllllli||tl|ll|||4! a: au :.44u.
L . .m.uaa4m
h=|l|l||llII||||I||||||l||11|||||ltlll|||||l||l||||l||l|ll||||ll|lllll|IL
-Juxmmcuh
.um arm yJH nu." rum nya yum nnF .du nar_ ..um nur* yan un.n van nam
u. 1* . 1 1 1 1 4x
apan. .mULKL. ut-wancnuZIJ MZuuC m zunpamuL 3
00.00 nn.nnN nu CNN un n 0.00N 00 t. nn u nu t nn UNN un nam nu nu nu nu_ nu nu_ nu UF_ nu om_ nu un. nu ur_ nu und nu NN_ nu.0._ nu nu_ nu r nu nu Uh un c un ( un nr un nu HH nu nu nu nd nu
.F D F .F . är i . P h W b kr i! I W i, i! nr ;av LV k., 0 a .n. mama lI JC . F C H in !
ñiIlMHHWI\ HIIIIIIA hWIIlv u
. [ 1 nu
I
;
l
i l 2
1
J
xza c T V A H P O S « . « 4 . , 4 . * . . . \4 . q 4 , 1 V 1rr..m nn.uu ,a nu mu,nu rn n» nn.wp a. n» o_ n nø.pm nu_vø mm mm n.pn *u rn ..4 n an ur N. nr pm mr nø mn ,J J» mn nn ur nu nr u u» v& »a _n an .. rn m. m. m_ 7* m va 0 zu n W
t vn ñP O S VTI M E DD E L A ND E 300
Bi la ga 1 Si d 3( 4) 2.2.8.2 mw>
_mul uJuT1m. n :umwxnwb .Ixrr um Iman :ur .chkrc b xm .uzumror tr
*Lammha .wouomu .u .Yuma ».uqahåu.. ...Lmqurxnz :mnmuumnu
Kum_.c\mumu.a -. uzmzaämccmn n: rusczczzuuz:
L rcrmmzmm
/Lyc
APO.: Gzcbm>q gain) :UD .m_mI ._N_L> ..:..=.. I LquJDWI nu 0.. nu nmN nu omm nu arm 00 man nu .a 00 0 H up a u ...n orm nn MHN nu un_ no nu_ nn nr_ nn om_ nu .3... nu 07_ nu nn_ ....unn_ nu 0._ nu nu_ und... nu nu nu nu, unna undr nu om nu n nu u nu.
L 'F b - L4 th L 'I L 1- 5 L L libl L ' L L L | as a-IZ IJ IT S G l ' i s rn... .h 3 _r_® :UD _n.mr ..N_..; ._:mr - r.wwwurt4dtuu2 bl r P P P! . ur Lr P .F F F F r .W 10 L,... . 't . .W i? F 3.... 6.. M .M W w Wi .w um um au| Cl. C. C. an 0 CI.. L nu .I
Main) :go :Snr ._N_u ._:Lt o u,u mmrz0_m W
r r r hr br I r i' -7 F r, LI P r F P P kr b ir P \P P F F b kr P br .1... 0 s um. » u .tMIIIIIIIIJIIIIiIIIII Mwm nu ?i
. rñiá
1 I\ BU'a
S] CI S l 3. ?MM å nu m:t u.....muggar rg: .NZJQFNQ ._:4Jor ., uz_zunc .1 nr? i! E xp P P, br r P r D P kr P P P P V kF I ir F F! F irl? bl Xr r b.. .I 2 M .du m 04 1 I\ DU CO _ .J-.nu P W! .I .w > l NT . iw x 1 nu 3 .1. 0 C 9.---nnnnnn---x---1752.5
unsl|-Aannm|a|allo||||a||0|| ||0||||..|1....\I|||I||||||at|atll|||-||||-aa-\ InñuCuaau
.. ---s----.---.---xa---s--- :Sååå E---1---1--- E
Juxmnuuw
...ud HM .40 nun .nam anwa Ngn nu..N .Lan nuL. ...nu nu.. ...Du Aura ...du 9:9.
abc: "ADanL wznzhzurmUZL.. nruut; _ zumhnmøt 0
nu HL .nun ....UOMN ...H PN .nu own u). udNUHu nu .HN .un NN nu 0:4. nu MHN un nm_un Du udu...uünøøndnn. nn Elan". un UN_Unn: nu nu_ nu Um ung nu nu. Hud nu... nu av nun HUHN und" 0010. H
Fl J 0 « til P I LV r F ;Vr 0 0 P »1 F .F . .F V b' .71 # .DN i .7 T N ...7; mn uu :nu nu nu :MJh ...u .wF 0.:. nu 0.. nare nu Tu som 5 nu .arm .0 .1. vn u.. m» n.. ...v w.. mrø .hamn ms. nu »fun :..PH ärm nu .n und_ En. man_ .LM man En
_n_ man. m n
2 3.1
...zinllsiHu lêiil .LTULHJ i!? ån!:3:e hills.. m n.
il.) l|ll|l| .. lill..I .I'III'L Fil.. |
0 :5
...lt tal! vi!! it.-- (ll: iii: 5,3- -..ln u||| ill. fit- I II... lll I lill. 1.11.13 3 .CO
0 P. nu? än 25 GB 4.r. J.W VT I M E D D E L A N D E 30 0
Bi la ga 1 Si d 4( 4) \ Säga? _h>
.muc> namnum_ o zunwxumm .txcx mm :(mm rum .Jquumc p Nm .Qzumcox cb
:pmmMFN .maocuu »u .zman »m4awnnb .Jmmqarmnz :mnmmumau
xmm_.c\mumu.o e mz_zn4"mc<mm G« ru>nzctzuczn 6 I .i r um 7 0-1 ååh . Tüwmmzmm
apan_ cchm>m _r_c> run _m_mt .nm_m .___LI - LMJMJDWE
nanm HON nn Dum Unn 0.08 nunnan TN HUÖHN nn.UNN 00.0; nHOHN nu Om: "0.00" nu nu." undw nu nu 0 nr" nn nn_un nu. nu H: nudu Hud nnáu nn n.. mudd Hu uno nun uni und nu
. LlL L L L LIP L L L L L L L L L L LP 'L LL L L Lr L L xp L L L LLMUS _ .I Lt I OI. arv.. : ll. [i 0 D i a
_r_u> two .m_mr ..N_u ..«.LE . ruwuurrgurmhz N
P P F L P P P P P P E P P P F L L F L L L . L L » hm .nu LJ. HU1| 61 g ul. .DN .14 DL Cl nu.) OC (bi man G { Z Rhin 1-1 G H . .1| 8 M a till 51 1) 9 N Tr; K.\ o, |I HU. Hc Inu Kau nu I. .l 0 U .. W1.0 . nuu m nun H/ 4 V nu] 1 IL V \) \/ V .f lr . u' m vu 4 # ALL r . w Y:rtlll, 4 m 1 1 R 4 m 1 RU RU nu u - - - m m m m m m m m m m m m m m - - - s - - - o _-_uanm un- | m m m n a m m m - m - - - . - - - x - - - a - - - a - - - nu nu LUJJU kl | I. . .0 W W I I I l | I I |. | I | I I .0 I | I | | I I I I | |5 i»I ,O 4 I I .0i.- A I I || | | :I I 4 .I i I I. I 1 i | .I .| 0 I I! I: | I I 0 I I kBlllléWøWWølIlilaillliiaclllAntillclilllllls0llltllllhltlillllllldlnlit: .nn \ auanOnh
Sum nära. iun nu »n 4w nuan run n.an rum MH .run nn L ,han un u iun na.
Ax . . 1 4 11 .
*.HL_ mmULxh1 m2-ZqucmuzlJ m7uuc> » :hmw_muL
nu 000 nu nuh nu ut. nu OWN nn n.. nu ...än man nu. nu ONNUUUHN uu nm_un ?run Utan ammunum Muzuu um_ un HN* un in nu ung nu .nu Uh un nu unna un ur un .uu ....n HN nud- uü
- av 1 E4! .1 * p b 0 » P L44L 0 h L! P 1
;i mnuu :du MNdu Tum.. nu.: m.: mans nñFø nu ...w :m8 §2. ;min .9.1. vv »7 Nu nr r... .nr nøvø pøøn av nu »1 nu GIF... .ark nhgu nu u.. rund MSN" :Nm maa .Jun
r. muLu :1 30 ?L ÖO 3 6 a 33
l
i
l l
i ! I I I I ! I
1W
i
5m
2+»
i
M
i i l i I l I ! I J
M
*
W
i
m
*
.3 23 0 3a I va n P n s > -i ss T V A B P U S VT I M E D D E L A N D E 30 0Bilaga 2
Sid 1(4)
Bilaga 2
Simuleringsresuitat för manöver "C" vid konstant hastighet av 90 km/h,
friktionen 0,18 mellan spåren och 0,75 i spåren samt 2, 4 respektive 6 cm spårdjup.
Bi la ga 2 Si d 2( 4) :Hudwg
.Lm_mp u 0 m, a zonpxmm; .zxzx um :cum nun .44ag:x h gm .uzummax :p
rammmpa .n.uomu .u .xuau »ugcw-up .kaaurru xmuuqomnu
um_ nxmgm_c , uz_nn4"mmcam u_ wD5czazzucz:
/uzçmnm
:on: ch.*m u :inta :ua _m_m.L .nm_m ._:L: | LmeÄJñZ
M + at t H ' N M T
nu nu nu HN un 8 nu arm nn man nu man un arm nu 0 nu .nun .35:a nu 3 nu 02 man! nova... 8,8. n um_ nu ...4: nu un. nu nu_ no 8 nu nu ndm nu nu una.. nu nu i. a.. nu 0.. nu nun" nu..
F L 5 L 'IP [lur L II [kl th 'LI b [L *L 'L kr [iii I L . kr L L E L 'L L L 'F L 'L
mmnv|xnvnyuw\nnunHnuJwuuIkmnwwnwuu nHunnnmnuuu\xuxnJwnnnuyaAnuurnnnuuvA wwuuuv|1z|n»wunuu ur4umwxpthHRW$uz 5D
n.. % \/ \/ .. Lu' §1 /\/\ 0 M .6 a M 7 7 . . -. _ _ 4 , * viatt CC CS ' 24' ] (K ÅF «
§5
:2:i28 01 ' ( 1 3 1 " of f_ Alr -F '0 - 'f'1/
/ P <-[7 .1 de 5 59 "! ( ; 3 1 ' * 4 6 HJ UU H: ) .L i L 8 3 9 5. 2 'C h Et bh h' hC 'Z Z* l 30 1-) LN iL JU UH M i l (l ux-1 LN auuw a - - - u» .-.aaudm nu---m-m---u-- --\-u---*---.---;---a--- ...353... L --- ----s---a---1---c---s--- ;Sååå ET---u---|a||c-|- ---1-s----«-||-a-x-|;--..-a-- --- E ._uxümuz, . . V . . 3 L 3,En 8% .im www .Lm ...mh ...m 3.. ...m 8,_ .ha sin 3 i?
A 4 4 4 4 d
:0,: woLåZ nznzpznmmuzc... malde., n Zumwmnun_
. J' .1 .a , l \ .4 A 1 1 Å) J Jia m
un ,Hun nu MN 8 ann nn HC.. un n. nu nu nu u an nøN nu 0 un 0; nu ,.c un rn" nn nu_ nu ut rn om nu nu nu Hr_ un cm_ nn um" nu 0: nu nu nu mm nu av :n n un wc un nn ru U ...x M... N r.. i :I .
[T b1 xF4 m 0 . .r 4 ar . h _ u1 n« . rq ». V r4 .r v 0 W 0 a b H h7.
I. Fm mu.uu :du mwüu ...nur Hawa. m. p 0. mh 0050 naiü 300 mm han arm .9.1. en ut nunr rø Nr mera :.06 man. »run :ann un TN mn._u un u_ run. 9.2 :m med ?nu
. E. 3.:. m.Il 65
.HT 31
:3.2.3 0 G
i 1_ r _ H _ r
-. L r;i.-|H till - 3
I alla!! I.||| ?I till. ll! :I|:| Ill. lill.. IIIII i- y ! III ...til iull| i!! I: till! ...till ll llik ?Allvleâ.J :M
nu ut L .LM snV ;223-Iåi qv JrY.. VT I M E D D E L A N D E 30 0
Bi la ga 2 Si d 3( 4)
,Homeomme _h>
/ .mm.mh D m m_ a zu_ rmwb .rxrx um adam nu: .JJULI1> Nm .azumrox :h
7_Iumh_ .m.onpu »u .xuac a4a |nh .JWGDGrmuz xm u&um=u
x_mg Oxcwm.o L mznzOJ.mmch O_ Im>ozcnzu023
;YLE murmmzmm _FDL_ üdem>G .r.ü> tuu .m.mr ..N_L ..._LZ L*Jm131: + 0 K . 5. H v. _ h a r i r
nu ut nu nmN un cum nu nu nu nu unu nu nhN nu ...Nm nn.n_m nu nun un Hann nu_ nu minu nånn brun .ur- ucnn nånn nZunnd man nu H.. 0.. nanm nu nu nn un.. und_ nn.
F i L L L kr 'L 'L :L I.. L L L L L L L L F 'L L L L L Ib »Mus .1 C: n..J Y?ÅK 5 ba \II 07a.II .L T b\ 4> nu . nu (5 O HA r.. ...Hd .r b P r P F .D (U .J 0 # :nl Mi nu \l m 5: .nN TJ. OOn... allCL Fx NU' (' cl 1.0 8.1 r.. .A 50 U L Du nu( I.. nu ll \Å hr bl P »7 F L" .U 1-... nu Li Gm 5.... N Cr. 31 6 nu mdi -' I. *JN ;um I..I 0 l Lnu 0 L 1 null .bla
_MM30 Ido _m_rupmu .__uunc z mznzoum
00 9' H J O U U i FU
/
! :Ol' 00 1 u |||.inonnlaltllnnn|noo|wn-n o-|||..ao:0a|!|t|..0||||»|-||.. u n|_QøGJn una--mm--- -\---.--- azaüju .V t.--- :353% kan. I I i .I l .l i l | I l | I .I i I l 0 I I i I I i. I l i I | 0 .I ... I I .9 | I I I I. I 4umeO_»...m nu L. Hr .in nu.. ...1. nu.. .in ...Fu .En 3.
Fram_ mupxu4 02-2»:ummu2(4 mzumc _ znnhmmcL M
un nun nu MN nu man nu nhw nu 0. nu mala. Hud »nn ha nu nu und.. nn MHN nu um" ...0 nu_ nu ur_ nu oo_ nu .1. _ nu 07. nu ur_ ...0 på. nu u: nu nu nu r nu nun.. .nu nu nu 0 nun un UN uu u nu H
, L! E . , P r »r Lr p . n r P ! h n F h .
V 1 < 4 14 4 a 4 |1 4 17 4 W 1.1 < 4 1 H 4 n d 4 4 1 4 4 1 4\ 7
I. .m ...n Lu I .44 mm nu rm m... ...n en 0. 2. u_ nn nn ...w Nfc om 3 .m ha 4» .rn .ugn 0h M' N» nr hva.. n.. .H ...n .un nu nu »1 un n? FH vn :N nnqu nu.: ?N 0. m. N. .1 m ma w rn r
_r_ En. u2:0 .n
.J 14.' \. ll
- _ p » _ m m
|5|1t!, i Flzlll!< r|!|ll! «
\U .\1l§|l\\§r :ÖK .us
lll. 'I 'I l I I 'lll 'I I |.|\h\l|||\.|\cl|||l|i t! ill l|n il). liill. 'in' till I 'i' I. II] I I.. i lilla .Ill vw 'J O O
i m nu .-H HR M h R U' AI. .HV 1.7. '1. VT I M E D D E L A N D E 30 0
Bi la ga 2 Si d 4( 4) 260.82 :Lø
.mm_mr o m m" u :pnrxnmb .Exrx un Iwan tum .JJuurL h xm .azammax :b
r_cumh« .wquomu .m .ruta »u4üwanh .Jmnqcrmnz :mammomnu
rwmalaxcum.c ; mzH204wmrqmw u fu ozczzucz:
k mummmzmm
_høm. uchm>u .r.m Iuo .m_mr ._N_L ._u.m: I L JMJHW=
nu nt nn MHN undum nu HUDWNHDUAN und-;N ...3:70 nn HNN nu Oø nu .JUN nn.um_nn nu. un OP_ m0 om" Un Om_ undr- nu 3"_ ...en nu Unn: nu nu nu :.n nu nu mh nu om nu 0.0! Hin nn un.0u UH.
- L IP .L L | [L .b i i - L ...L L L L L L kr L P L xP - L . u n . :.05 H! Lfl
.e
...Mf.
N ut G 05 HD_7.m Eau .m_mr \_N_u ..__Lz 4 anrurrxacrcnz i
F F hr P P P P . r . ? b r . br P P .r .r P P i! by *MW *nu-w _ Y1 I 7»11 nu.. m I, 1 || eg il O I'lllib' (PJ .BN . .I/ ,RL 3k rm ...1 :1"nu .in rMnu nu alt ll,.-Cnl Ib .C | N p' r p u! .k c WLWJ mm nu :få Om nu! HU . n.. I II.. mnw .ua GB I.: av! Ein .MWZCF Lpo .N_fuhrt ..._JJUC . mzHZmuE
F .7 i i' .I i r P P F P P D I .7 F r P P I P P br P LV k' ;FV xr Tolf? CU 5.5 mml " / \$ .1 v r :Jfr/l 4. . v w u v... .1 nu nu nu u ---\---mmnnmmm--- 27.3an innil| | ill I | | .ll I | ll | I ||| ln! | I i I | i l. I i 4 | l l- \ | I | I i | | l l | | l | I | ..---|---.---s---s--- :35aqu E-mnnnx---l-x---a--- E Juxunünw
...un 00.»N sun uuwm vad» unw_ ....40 OUM. rannsam bum OM.
*FDL* WmDLxum 02_2wrncnu2(4 nruuc u zunw_mUL M
nu.. nu .1... UHGQN nn OPM nu omm nununuaunug nu NN nn nnNUHHHMuan_ uu nuaun Hb_ un Gøuun HM" un 1.40 Fann amanda: nu nu_ nu., nu om nu Hb nu nu; nu Ur man nu.: nu nu nu .. hu
T * .0 w 0 .1 T .r 0 L. » w .. w . .7 L* 0 _ 0 0 . . w u v « N L
;gm nu: :nu HNUU rad.: nu.: 0.2. 0_ .nr nu, nia :om ;Fn in.: .u 1 m» nr Np nr ...w mr ...www ha...? nu nu ut nu :TFH unrm »u .n ,un u. TNJ. m_.N- r-m mom ?On
2.: 3.:. m .5.
nu ,I
llääiliiv.l; W H M h
\ rllllllu « x
Ilulqllnlillnlllllliliill - i!i|§llai luli1!ll.$5xm
nu a.. av .um .JR- V Y 1 VT I M E D D E L A N D E 30 0
Bilaga 3
Sid 1(3)
Bilaga 3
Simuleringsresultat för manöver "A" i kombination med inbromsning, frik-tionen 0,30 mellan spåren och 0,75 i spåren samt 0 respektive 2 cm spårdjup.
VT I M E D D E L A N D E 30 0 -S Z O O ? V a H P O S -a as I va ñP U S ih | 3 6 3 S i
i
-1. 1 .J1
I 4J sF UT ! [PCS in! 301605 9h12l21§h1E382.33213!?74332.3!3352365739821257ä5721t76511.SHMS7936396:610L67AC'57CICHIS1§ZCTSNC22822NEf'359|'l'1!
!
i
|
I
I
l
1
h
i
i
l
l
i
I
i
I
I
1
i
i
l
i
3
Å
L 7 \C BC' SL ;D 0'. :i 02. SC 32 R OC TG 0: C: 88 06. 1700 08718 1120 03132 03 NE ü 15300160 08175 GC' IEC 36 292 00 208 05 212 012 225. DL' 230 BC ?12.30 258 CC' ?LG 03 NEOC ?CL SC 23; SS '302 BC?CSJTIUN ] VAGCNS LhNGquñTNlNG lilPUS) [FUTl
7 h 3. ma n ma n 4 A A
.50 Sln :is: 5:a 47105 5:a 1.50 scn Eino SEK 21:0 scn §700 SEK 3150 Stl sina sax
TIDSRXEL Hr -""--""'-'---°"'-'---'-** * - - - ->----"---'-'--°'-'-'v'--°-- ---HF SLRDDISlvr __,_______,__-_,__,___-_______________,_ . _ _ _ _ _ _ _ , _ _ _ , __55___________,,_________--________vr ELLEntJna ___-____,_-__-___-___,________,_,-_,__,____,___,_________-_-____________,--______,____,_n5 SLRDDl-l 'b , _ _ _ _ _ , - _ - - _ _ _ _ _ _ - _ _ _ , _ , , _ - _ _ - _ _ _ - _ _ _._- - __ _ __ _ . . . . , . -..5 5 . . _ . . . _ . . . . _ . _ . . . _ . . . . _ . _ _ _-vg *b 00 S DD 'l ' 00 1: U J U U U S vñlDNlNB DO Zl l |U 1' l Lt (S M. El ' 90 Oi l' §E:::=__ \../' 00 C' 00 Ii ' ( ;0 1' \ 59 1 ...v OO WI L l N l l J b e ES 31-. 35 'S E Ho z-a 501 0003 00 05 hl F 42 1 ;0 1. 1 l l e a uuH k'Jf'I-WHLKHQF'EH ' hrlll. V* .2' 00 8 00 l
( Z l l e S .1.0 ...A rv 7._ .r T Y* 1_ r r rv* r' u .UU 10.00 20.0C 39.00 1C UC 5C CC 50.05! 'IC OC 80.00 93.00 100 0011003 120.00 133 0111932215005 150 00 170.0018011919303 ?30.03 210 00 ?22.08 230.03 ?43.00 ?5300 260.00 TH? 00 280.00 298 33 (3.00
hJULSLIP - HFlll. VFIZi. Hñl31 OCH VBIHI GVSTAND (FCT)
GUTOPQ FlbijL,
UNDRNHRNDVEH (0 USCH/0.155Kl OCH BHDHSNING (120!"
EUHDPEISK NURHQLBIL. 7G-TQLE' UñCK. GY 880045. lVSSHlH
7h nnñBGNR. 3 2 TVäRFQLL. CJ SPAR 9C KH/H. IRJKTlUN 0.30 0 U 7StSP! VTI 1983.06.23 Bi la ga 3 Si d 2(3 )
VT I M E D D E L A N D E 30 0 I V A H P O S t H S SLRDDIS) 'r ?3 % -1 10 0 00 F V A H P O U
!
l 2 I II
I
I ! is l1!
I
|
! 3l
:gnunmm A-EêiiiT-_jr--wM-ø
lf |J 1i 12 00 ?L CD ?25 .5 P' r:c I 09 10.82 ?SACO :C C C c: 5: :I 2 3: 7: CPOSITION 1 f.- ,ANGSHIKYNING Å=XPUSi IFDII
.33 ?ik
A
I 'I
1 J 4.
.ha SLK disc sz* iia: scx aTsn st*
TIDSGXCL [LLrn (J "5 _ _ _ - , _ , - , , _ _ _ _ _ _ _ _ _ _ _ _ _ - _ , l _ - ; __ _ - - ,-sLnoo|- vc : ;O I-I (N IL JH HH n ;0 1c 1N 11 4ua x hh h 83 '? " hl 'Z Z' L V IL t h h G U M i --b ?-'p r Å j/ l *F 0 4;» « Hö ,_ ._ _. 09 h CZ G' CU SI ' U J U U U J
VHIDNIHC » RULLII). PITCH12) FT* VGuI3.
00 '0 1 OG 'D C* 00 05 ' l 1 0 1 ' 3 S E T i°PE .13 3: it 3) 32 35 51 33 62 H2A57 §5 77 t 36 51.C. 51 f* 21 3. "_1 ha 4ü< 4ru< OO Oh ,_ __ _7 __ __ u. GO oss 00 en: ' D i'l NORHRRK°CFYEB - hF^ll. VFKZ). "513) CC" VBIHL 00 fn 00 _ áj ,,//""' \1|\.--:77,4k55§7r 1 ' *»*-«-ÃF§ A_ 1 C' r\ j 5 "" srx 2252 szx ---_---_---_---|iø ' 3 Se 3: b? 33 72 [C 73.l$ 16 23 73.29 :3.23 22.15 E! 13 91 1% V | :7 Å . 1 T Y Y i j 1 j T T Y '-7 1' V V Y Y I EC 8: 3: 82 133 33 18 32 223 3: :33 33 143 02 IS: 02 IEC 2 173 C: 2 G 3: 13: :I 233 32 21; 02 22: 0: 233 03 ?H2 :2 C 03 250 92 272 EC 2 C :2 233 3: C 31 $;SC Sl' (Z lJ lW S -r 7 r_ I 1 tarm..- _w- .- . .__. Ba_ |||a ^
HJULSLIP - HFll). VFI21. "513) OCH VBIH) RVSTAND (FUTI
BPNHS2P9
UNDRNNQNCv/Ep IS DSGR/U.lSEK) OFH BRCHSNXNE (120)
EUROPflsh NCHHQLBEL. 70-1RLFT DATK. LT EtOOJS. 1755qu ?H KORBÃNL. 37 TVBRFQLL. ?CF SPAR 9C Kr/H. FEJKIJCn L 3: C 0 7Siåpb
r han « "- rq 'i ' 1' T' 7' 7" *I* I I I V I I* '-13.33 22.3C 30 01 QOADC 50.8? 53.33 73 33 30.82 53.02 100 US llC 32 123 03 | C 32 IH3.CC 150 00 163.03 110 33 123.38 19» -g -N M T LI 'u H H H Y_ *ri T_ 7-* r_-i I .3.83 213 03 22: on 233.00 ?H3 03 253.33 ZES UU 278.23 223.32 232 00 383 03 Bi la ga 3 Si d 3(3 )