STATENS VÄG- OCH TRAFIKINSTITUT National Swedish Road and Traffic Research Institute
ANALOGIMASKINPROGRAM FÖR ENKEL MATEMATISK MODELL
AV HUSVAGNSEKIPAGE )
'
av
_ Georg Magnusson, Olle Nordström och Brajnandan Sinha
RAPPORT Nr 15
Stockholm 1972
STATENS VÄG- OCH TRAFIKINSTITUT
National Swedish Road and Traffic Research InstituteANALOGIMASKINPROGRAM FÖR ENKEL MATEMATISK MODELL AV HUSVAGNSEKIPAGE
av
Georg Magnusson, Olle Nordström och Brajnandan Sinha
RAPPORT Nr 15
3.1 3.2 3.3 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 lNNEHÃLLSFÖRTECKNlNG REFERAT INLEDNING
BEGRE PPS FÖR KLAR INGAR Avdriftsv inkel
Kröngstyrning
S id kraft
MATEAMT [5 K FOR DONS MODELL Betec kningor
Rörelseekvaf inner S idkrafter
Avdr iftsvinklar
Luftmofstånd
Pendl ingsd'dmpn ing
Rörelser-:kvot ioner i fö: analogprogrammer ing lömpl Eg form Rörelsen uttryckt i det fixa koordinatsystemet
SIMULERlNGSPROGRAM REFERENSER Tabell 1 V" . Rapport 15 . Sid N N N N .h 10 H 12 14 14 14 16 18 19
Figur l Figur 2 Figur 3 Figur 4 Figur 5 Figur 6 Figur 7 Figur 8 FlGURFÖRTECKNlNG
Schemalisk framställning av avdriftsvinkel och styrvinkel för ett framhjul.
Dimensionsbetec kningar för personbil med enaxlad släpvagn. Dimensionsbetec kn ingar och kraftplan för personbil med enaxlad släpvagn.
Kraffplan för personbil med enaxlad släpvagn.
är den totala sidaccelerationen 56
Exempel på däckdiagram. f (6) för p. = 1,0. Kraftplan för kröngande slöpk'drra SH
é" som funktion av ä n = 0,67.
Analog ischema för dragfordon med enaxlat slöpfordon.
VTl . Rapport 15.
Sid
13 15 W
l REFERAT
En matematisk modell av fordonskombinationen personbil med tillkopplad enaxlad
släp-vagn har framtagits och programmerats för simulering i analogdator. Motivet För detta arbete var att åstadkomma en enkel, snabb och billig metod att finna lämpliga åtgärder
för att förbättra de kördynamiska egenskaperna hos vid typbesiktning underkända
enax-lade släpvagnar och husvagnar.
Med hiälp av detta analogimaskinprogram där körprovet sålunda kan simuleras för den aktuella kombination har man möjligheter att enkelt och snabbt ändra olika fordonspa-rametrar såsom däc kdata,dragstångslängd, tyngdpunktsläge, hiulupphängningsgeometri m m och därigenom på ett snabbt och ekonomiskt sätt analysera vilka ändringar som bör vidtagas för att fordonet skall kunna godkännas.
2 lNLEDNlNG
Vid typbesiktning av släpvagnar och husvagnar för personbilar kontrolleras
köregenskap-erna genom praktiska prov. I de fall där fordonen inte kan godkännas uppkommer för tillverkaren eller generalagenten problemet att förbättra fordonet i ett eller flera
av-seenden.. Då fordonskombinationens kördynamik till sin natur är ett mycket komplext :fenomen kan det många gånger vara svårt att på enbart empirisk väg förutsäga .lyc kosam-ma korrektionsåtgärder. Det bör så vitt möjligt undvikas att släpvagnens tillverkare eller generalagent tvingas genomföra kostnadskrävande modifieringar av släpvagnen utan att på förhand veta om de vidtagna åtgärderna kommer att leda till önskat resultat.
Det har därför bedömts angeläget att få fram en metod som möjliggör att' inverkan på
fordonskombinationens kördynamik av olika tänkbara konstruktionsändringar kan provas på ett mindre tids- och kostnadskrävande sätt än fullskaleförsök av typ "trial--and-erroar'"c En metod som i andra sammanhang visat sig lämplig vid studium av fordon och fordons-kombinationers egenskaper är simulering med hjälp av en matematisk fordonsmodell .
Sådana studier har tidigare genomförts vid institutet (Kullberg mfl 1967 och Nordström
mfl 1972). Båda dessa teoretiska studier av lätta respektive tunga fordonskombinationer beledsagades av fältförsök som genomfördes i syfte att validera de matematiska modeller-na. Jämförelsen mellan vid simulering och vid fältförsök erhållna resultat visade i bå da undersökningarna att matematisk simulering är en metod som är väl ägnad att användas vid studium av fordons och fordonskombinationers kördynamiska egenskaper .
Mot denna bakgrund har institutet av statens trafiksäkerhetsverk erhållit uppdraget att framtaga en matematisk modell av fordonskombinationen personbil med enaxlad
släp-vagn (släpkärra) samt att programmera denna modell för simulering av det aktuella
kör-provet i anal09dator. Redogörelse för den matematiska modellen och för
simulerings-programmet lämnas i det föliande.
3 BEGREPPSFÖRKLARINGAR
3.1 Avdriftsvinkel
För ett hjul definieras avdriftsvinkeln som vinkeln mellan hiulplanet och hiulcentrums hastighetsvektors riktning. För ett fordon definieras avdriftsvinkeln som vinkeln mellan fordonets löngdaxel och tyngdpunktens hastighetsvektors riktning. (Se fig 1 ).
3.2 Kröngstyrning
Med kröngstyrning avses en av fordonets kröngning betingad vridning av ett el ler flera
hjul med avseende på en vertikal axel genom hjulcentrum. Kröngstyrning kan förekomma vid samtliga hiul sålunda även vid i konventionell mening icke styrbara sådana.
3.3 Sidkraft
Med sidkraft avses en mot hiulplanets skörningslinie med vägbanan vinkelröt 'friktions-kraft som till sin storlek är beroende av bla avdriftsvinkel och hiulbelastning.
:5.
F? [1; Seg/mm:ka fmmaåüååmê -' av üváüñwåäimi ash g wånkei FörQ ü 22%" "gymmth en
4 ia. *AT EN-*AT l SK F ORD i) NSM 'DD ELL
Den matematiska modellen gäller för en tvåaxlad dragbil med tillkopplad enaxlad
släp-vagn (slöpkörra). Modellen är avsedd för körning med konstant hastighet varför axel-lasterna ör konstanta. Vid kurvkörning uppkommande belastningsöverflyttningar mellan de båda hiul en på enaxel försummas också. Genom att även styrvinklarna för de båda framhjulen antages lika kan de båda hiulen på en axel tänkas ersatta av ett enda hiul placerat mitt emellan de verkliga hjulen..
D'dckens sidkrafter uttryckes som en lineör maximalvördesbegrönsad funktion av avdrifts-vinkel, friktionskoefficient och axellast. Hänsyn till kröngstyrning kan också tagas. Kröngrörelsen hos slöpfordonet beaktas på ett förenklat sätt men försummas helt för
drag-fordonet.
Vidare kan på dragfordonet verkande luftmotstånd beaktas liksom inverkan av pendlings-dämpare (fördstabilisator) i dragkopplingen.
4.1 Beteckningar
Dragtordon
m Massa
0 Avstånd mellan tyngdpunkt och kopplingspunkt b Avstånd mellan tyngdpunkt och bakaer
f Avstånd mellan tyngdpunkt och tramaxel
Jz NiaSStröghetsmoment m.a.p. en vertikal axel genom tyngdpunkten
A Frontarea D Drivkraft FLX Luftmotståndskratt 512 Sidkraft på framaxeln S34 Sidkratt på bakaern wL Luttmotståndskoeftic ient VTI. Rapport 15.
(-312 Framhjulens stywinkel 4512 Framhjulens avdriftsvinkel 534 Bakhiulens avdriftsvinkel lll Girvinkel pL Luftens täthet Släpfordon rn56 ia'assa
056 Avstånd mellan tyngdpunkt och kopplingspunkt h "56 Avstånai mellan tyngdpunkt och vägbanan
.1256 :iv-:asströghetsmoment m.a.ç30 en vertikal axel genom tyngdpunkten
J'CPSÖ Masströghetsmament maa.pc. kröngaxeln S56 Sidkratt 656 Avdriftsvinkel 6 Krängvinkel CC?56 Viskös kröngdömpning k(PS6 Kröngstyviäât Övriga storheter
x Koordinat i dragfordonets löngdriktning y (cordinat i dragforclonets tvürriktning Fkx Kopplingskrft i dragfordonets löngdriktning Fky Kopplingskraft i dragfordonets tvörriktning
Mk Pendlingsdämpancie moment
kk Konstaf'*"r för beräkning av Mk n Konstant för beräkning av Aik
i* Vinkel mellan dragfordon och slöpfordon 462 Rörelseekvationer
Följande ekvationwystem beskriver den ovan behandlade fordonskombinationens rörelser.
ensamma-2 pgixmza mig: ;gquggâw .agg mâasåugwgaqsuagmawgg 'g 835B c; g 3 :au-.52.4- *M- ermwxur (lä-hW VH .. Ra pp om 1.5 , 1
u 'rm åmwåmmw vägg ämm mångmth .5% mmmmwwwå emma Mmmämåäwååüääñå um mä
gm* J
.w
. 5...??...x
an_
VT ? . Ra pp ar t 15 ,,Fig 4. Kraftplan för personbil med enaxlad släpvagn.
5'! ' m . M K A I i , r f F m ka m-m m m m -: W 8 ' ' Ir -. W M W W a t - w-1.. M f I Iya/'Mi Mt: I i??? x j *Å
;
(93:35 :955 xil/
1
k. / ;gi . 3 K 2) i .Hg, 5,, Kmñgüian för hängande slüpkärm 85-456 är dem mmm âgäücwååüfüüüñüna,
?0. Drag fordønei* " 00.- 1 . z . l ' m(x vy) D+FLX+Fkx :HW-*11:52) == 512+334+Fky
J23; :§5 eb§Mm=quy+M
72 k Siöpfardanei'Om'FW+ 356 @
56 H VW) (040656) -* " 54595 4156 c1354:5] 2556"' Fky
Jcp56 §56 Ccpsé 956 k§54» (9256+ 56 EXW"**' )"'( " 5<s) *W545 Q "håé (P56.] 56
Jzåö (
56 Fkyww Fkx i? "bséssa "Mk
För 45m lösa detta ekvaticnssystem fordras ytterligare' information., Förutom kännedom om
?Vä-M
de numêriskcz värdena: på E ekvañomsysfemet ingående kommmer fordras även kännedcm om uttrycken För 'i kontakwfun mailan däck och vägbanan verkande krafter samt uttryck för luffmotstünde? min för penáiingsåömpningen i dragkopplingen.
4.3 _§Edkmfhesr
EH lufågummihiuis förmåga cm uppta sidkrafter beror av en' 'Marmi fakforer sådana som däcken uppbyggnad, gummibiandnång, friktion meHan däck och vägbam, beiaafningg
inre lufmyck, cambewinkei och avdriffsvinkgi.
Före?? vissa? däck sam rullar på en 'viing med en viss friktionskoefficienf sfår, om cumbewinkeiênfiyfande? försummas, sidkrafisupptagningsförmågan i en bestämdrelmicm 'HH hâufbelasming och avdrimvinkei. Dessa samheten' beräknas enligt nedanstående. - Axe? belasmingen
Axefbefcxsfningwm är en! 59? ovan kanstanm och Få; ur föiiande ekvationer. Dragfordonets framaxeå
i: G56 bax
12 Mb 56 056%56 F+b
H.
Dragfordanets bakaxe?
56
).;+3
656+b56.f+b
.. ?I
13314_---ar: eg;'§--_:j§l i-z'nf. ég('§L
Släpfordonefs axel
C1
56
P56= m 9'56 :2256+ 556
-Hiuibeiasmingar
Hiuêbeåasmingarna är enligt ovan kanstcmfo och lika med hälften av aerasterna. Dragfordon'ets framñiwi 'P ___ _I_ '52
Pl" 92'" 2
Dragfordonefs bakhêui P Släpfordünefs hg'uå Pm
a .Åá
% % 2
4.4 AvdriftsvinklcrEtt Quftgummidäck sam ruåiar under inverkan av en yttre sidkmff kommer om röra sig i en riktning som någe? avviker från båulpicnets riktning. Vinkein menar: hiulplanet och hiufen färdriktning kaiias .avdrêfi'svänkei . För varie däck av viss typ, fabrikat och áêmension står avdriffsvinkein i en' bestämt förhåüande ?EH .däcken smidkroftupptagande förmåga under Rimârsätming a?? övriga beüngelser, såsom hjulbeiastning, inre fufü'ryckr temperatur och Försl ätningsgrad* är kommmer. Om avdriftsvinkiama För de' båda hjuien på en axel föruüänes små och lika fås föiiczn-de uttryck.,
12.
Drog fardoneü Framme?
ö *ÅF-m?"
'52 bd4: *E
72Drag fordcnets bakaer 34 Hd
Siöpfordonets axe? _
_01 yå*(a+q56+b56)it '-(a55+b5 M
656 "
?Ski
' Q
De aktueHa sidkmftema fås siutiigen ur föiiande uffryck.
312 : mmm Pizmäzçm
534 x 634: P34, "* gaia
S56 "m 56, W P56 "' 56%6
där funktionarna Hö ,på fås ur diagram av typ som ?Nustreras i fig 6. De? ckfueHa värdet på friktionskoefñcåenfen begränsar maximulvärdet medan lutningen hos den icke hoñsmreiia deien bestämmas av den aktuella däcktypen.
Den senare delen av :JH-rycker: medger hänsynsifagqnde ms kröngstymingseffekter där ;Ear en konstant vars värde är beroende av den aktueHa hiuiupphöngningens geometri.
Det' bör påpekas of? 3 512 och 534 har krängstymirgsuti'rycket endast* medfqgüs'för cm förenkia en ?mmñda utbyggnad av fordonsmodeilen till att 'inkludera även kröng* ning hos dragfordonef. ! föreliggande versêon är'sâiunda dragfordonets krängvinkel cp alltså kc- med no (0).
4 . 5 Luftmofstånd
Luffmoi'siåndef ges av 'nedanståenáe förenklade uttryck
__ 7 . . . FLx-u ErAwLpLxle
13.
1,0 -1
9,9
-0,8 «
0,7 N
0,6 * Hö) 0,5 '-0,4 '4 0,3 '-0,2 -1 0,1 -« I I I i 1 | i I -0,;8'*=-0,7 *0,6 *0,5 -0,4 -O,3 -0,2 *0,1 T i I I 1 i I i01 0,2 0,3 0,4 0,5 0,6 0,7 0,8 rad
AVDRlFTSVINKEL (a)
»- *0,8 *0,9u 4,0
Fig' 6. Exempel på däckdiagmm. Hö) för ;3, = 1,0,
4.6 u Pendl inglsdömpning_
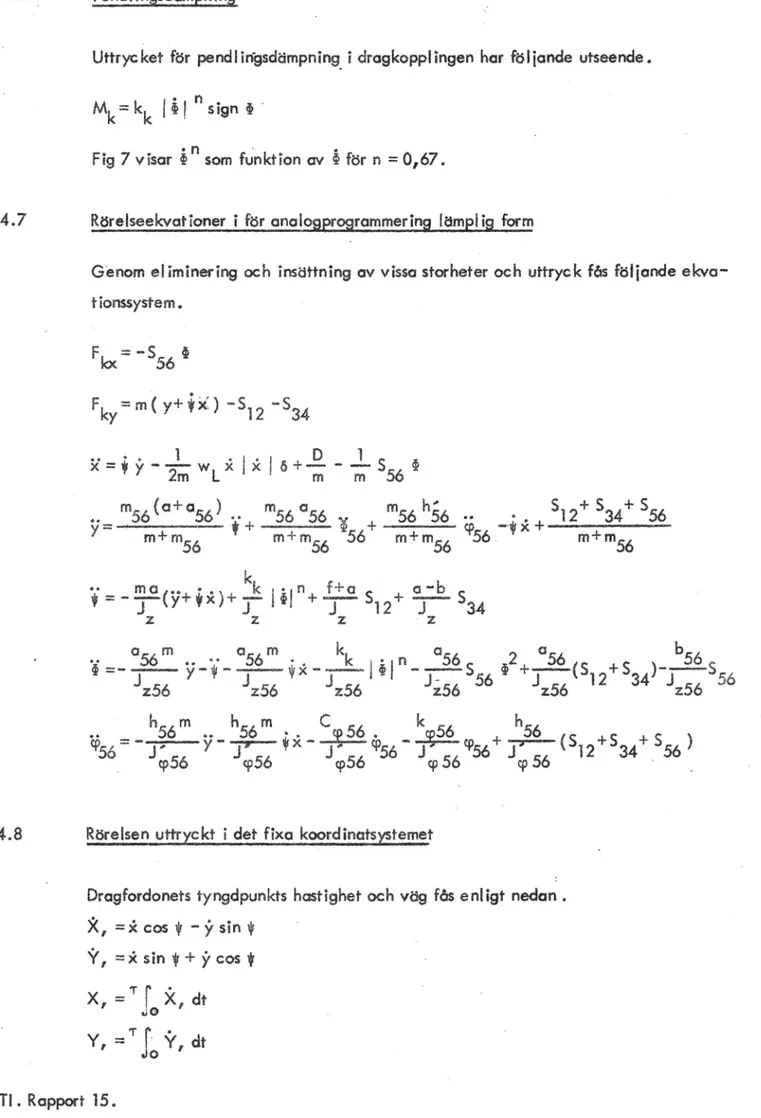
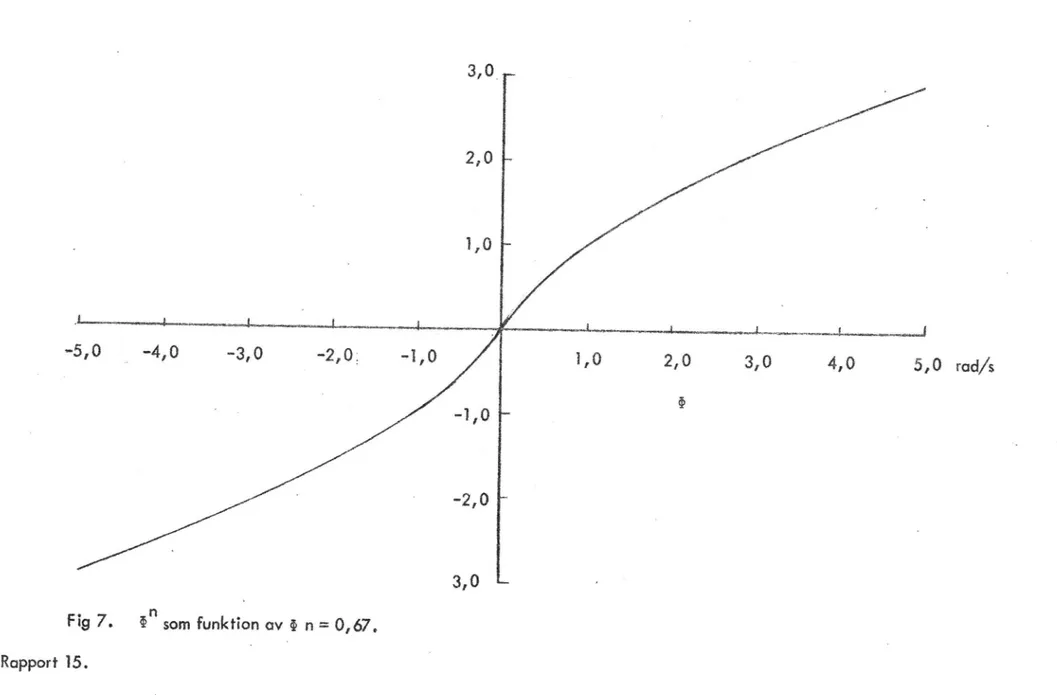
Uttryc ke? .för pendlin'gsdömpning. i dragkopplingen hur fällande utseende. - n . .
kakk IM sagnê
Fig 7 visar än som fdnkt'ion av âför n 3 0,67.
4.7 Rörefseekvañoner i För analeggrgrammering [amelia form
Genom eiiminering och ?mätning av vissa stcrhefer och uttryck fås följande ekva*
i' ionssysfem . Fkx=*556 ä Fkyzm( y+üx..) *512 534
Sêziyw-êåmeáiáiö-i-å-wl-S ê
m 56.m m56(a+°56) 05+ '56 56
m56 hâé ;é
gm 312* 5349' 556
m-i'mä6 m+m56 56 m+m56 56. m'i-m56 kk H- b ...nam M 0 . m o n 'G G*' J
ZWMU m + J 512* .3 534
Z Z ' 2H
56m
«« 56m »
kk . h
56
2 56
bäé
KJ
256
3%?" J
256
U
2.56
M *J* 55 +3 (512+534)"J 556
256
:56
256-h m h m C k h
äsáz"72á ?"3§é §á'jsgâá$5b'jgä°956+37:53 (512+534+556)
_
cpSé
:95.4:
cp56
gosa
cp56
\
_
4.8 Rörelsen us'tryckt ?det fixa koordinatsystemet
Dragfordonefs tyngdpunkts hastighef och väg fås enligt nedañ .
X, :icosü: *ysimy Y, zisin$+9cos$ T 0
x, =.- 50 x, dt
Y, :Tyck dt
VTI. Rapport 15.3,0,
2,0 w
*5,0
»4,0
-3,0
-2,0;
4,0
Fig 7. än som funktion av i: n -=-' 0,67.
VT! . Rapport 35.
1,0
2,0 Ö 3,0 4,0 5,0 rad/s 15 .lö.
5
SIMULERINGSPROGRAM
Den ovan beskrivna matematiska fordonsmodellen har pragramerats för simulering i ana-lagdatarnz. Schemat för denna simulering visas i fig 8. Tillhörande potentiometerlista presenteras i tabell i. De potentiometrar som i tabellen betecknas med bokstaven G
och en siffra markeras i schemat med samma siffra med ett streck ovanför. Sixming
Styrningen av modellen sker medelst en utanför analogdatorn placerad
vridpotentiome-ter. Utsignalen från denna potentiometer går via en annan potentiometer som medger
variation av styrutväxlingen och styr den matematiska fordonsmodellen.
VTI . Ra pp or t 15. Däckkarakteristik A9 A7 i ' A47_ 1. A15 1 A11 5 A15 17 Ari fi A 16 Att ' 11 I | | 1 I I I Vdgkoordinat A5 AH-A15 Ale _ AH A10 .
Fig. 8. Analogischema för dragfordon med enaxlat slöpfordon.
onuTugEkâthLdT
T
I
Slöpfordon
A52 A43 A74
17
18.
6 REFERENSER
Kullberg, G., Nordström, O., Magnusson, och Formgren, C.: Lätta
fordonskom-binotioners kördynomik och bromsförmågo. Statens vöginstitut. Meddelande 93, 1972. Nordström, CJ., hr?'-.ognusson, G. och Strandberg, L.: Tunga fordonskombincstioners dy-namiska stabilitet. Statens vög- och trafikinstitut. Rapport 9, 1972.
ä
'mmm 3
§
mmmmwm
Dragêmdørz med maxåm såäpfmáün
W, g. ä \ Säga* ' äêaá E - Nm v... ?a'mammmä
mm
?mn . Käg??? ?7k 'Fä'm ut .§2 Güspwai { OJÃE5 .ma n: av: L .wa v-1: -s ' a n 0: -W »k vm .m eg -_ ae _-r. ; +05, ?085*Q 4%»
w,
g
:g 7 .M Q §3' E.G 32
'T
i ,4
t
r J .,
jå M _ 'iQ/irrvmmgoâü
mmwé
Qmm
Q 2?
6,2 ** ?b
i
mas
53,25%
19 m /fmwnwj *.50 @,W7§é GFGWÅS å Ae:) 22 v hc. ?är _få/?03
_
9; mm
mm .'
Q .24 _ ,1155453561 20G/{m+m5é) »5a
mmá
mm
5:229
s
;i
\ __
E i; ?1
;
I ÖÅTUW
å
sv; '
?O'ä'ENWOMETEEMSm ?m
.20,
Sign_
{
V
mm 2
i . ;Nr. .
?wmeümumyck
värde
§ch Mm..
0
Sfymtväxiing
I 0,5
_v i? 0,50%
.i
0,2% (aâéuméé)
* A 5,62
2 0,52%
g 2 :
.
-? 3 40,2(a+aqå+b%)
?.22
i mms:
w
4 'FM
'
ms
; b.5000
5
mc. förra/5G?
, i 9.2:
0,20%
_
6 I
_
E.
I
4 7
- 8
T
_ §2
_. m
LC.. för Bag/mg
52.64
mmm _
M H
02 'f
W
0,26
6,2éüü
F
§2
'
i 23
' M
_
:1:5 Ii.ç. ?mm/551_
' 52.502
' mm
E
w
_
i
_
ha» 104mm « Jüåé _
9. 05m
5 (3.059:
F
18
200/200
{ 0.5
P 0,05%
g 'm-
_
i?
1
,i i'
'
.gg
209%.. .56) »520
53,52%
i 0,0%
F
'_22
,agámmaso/zümñå
^ :2.53
, 0,058:)
m
22
'kk-â/mcwwá
: 8.623079
07,06??
g
'_23
.3552032wa
v (2,09%
' 53.0%?
'
..24
\
V
i
25
5.6.. ?är E222]
. 53,27
0,27%
25
104/m°5á
0,3§33
9,3333
á
27
añágm m/zoøijyjüé
3? 5,8 i
0,530:
m
38
*356 .. 304/200 .2256
(3,53%6
0, 0%7,
-_29
w
SW ?GTSNWOMETMMSYÅ 21., ' _ Sign.
ökad 3*
' Nä g ?www-Mmmmâ i 33 . 15F(E§5ézü) Wâwg d -h i n F n '0 imwåånêm as tr a: m : am , l-.vr -W ): 1-.: M. a-'RA -.uu Gr, üåüü'30
så/'W
. i . 2%
% 96:5
.
33
?Såg/m_
0:399?
En : d e m a n d 51,99??agé?? *
(3, »556798 .w 35 v_:wâé
.
, ((2 »M7 5: ;tå/mm? :3,19 (31,79%4%
50°mwm/IJM
: 42
?34/20
" 0,75 0, G?50m- :
4 5»(2399:5.
0, 9997
(en u- s) « :84/3 00jag
Ö'ürüá
' 8,0500
FEM: I (2,679 ' - 0,67%? 1 | msékzmmäá) 'I Iüü/ám+ möá) « 56 agé-98? G, 498 'E 0,75%m'
åå
åâ
ååg
åä
å:
få
i:
:ââ.
§3
*5.0. mmm/mc» Jm
_. ;7,5
, .#1 5:253
amg/1001
03,012?
54 A 01021?455
: '56.§57
58avs at ta » 1' ?üTåW 22* Säga*
'
Mad 4
å ä
- '*
äfêfägåfå ;gmssagsêmg
- 4 få., u I i'__öä'â - :Jam/w
;5 ägg
å (3,66%
_6253
. '
_
'
w
i,
*W
52
?EJ/må
; ang??? ? amg?"
533 * ?(êwm?
; 5558?
E ê,8§?üü
M - i J_ . E"§5 1 65%
_ L
4 G,@§
' _8,0568 4_
W
M '
'
.
4
4
å
_ , 44,.. 5" ' A A' i ' Ä ,.W 1 mm
w .
,
I
mm
; 5,3 f wåra??
- .
w
i mmm
w
$ ,
. e
, .A
V
j m:
9:05
i (3,052
' mmm
A ?2:
M
J? .
.
v 4' 'i * r *I * * 'W §44 U *27* rr. '7 \ v _ ?3 imgée §55* mü/WE'*M5@ '533 §M4$$3 9,4'4555 i !1?5 , .aa/m*
;
üféåäüü .
;5
63,63
w mm
'r
.i ?22:
gg
6,5)25é
, F ü,á'§2§é
ü,ü,.-5é
?8% i
i
E
T 32
Ö
83 ;
;
v
54
,
i
:
-35 :_héånmiäüQ/.âåååwaü
: ?4,8% .
6,27%?
m;
i ÖÅ? ?#345