VTT notat
Nr 22-1996 Utgivningsår: 1997
Titel: Inventering av simuleringsmodeller för trafik i tätort Författare: Elisabeth Schmeling och Carl-Gustaf Wallman
Programområde: Trafikteknik Projektnummer: 12018
Projektnamn: Trafiksimulering - tätort Uppdragsgivare: VTI Distribution: Fri div Väg- och transport-forskningsinstitutet ä
Innehållsförteckning
2.1
2.1.1
2.1.2
2.1.3
2.1.4
2.2
4.1
4.2
4.3
4.5
4.6
4.7
4.8
5.1
5.2
5.3
5.4
5.5
6.1
6.2
6.3
7.1 7.2 7.3 8.1 8.2 8.2.1 8.2.2 8.2.3 8.2.4 BakgrundÖversikt
Modellöversikt enligt Watling
Inledning
Översikt av existerande modeller
Nya infallsvinklar
Framtida forskning
Egen litteraturstudie Allmänt om assignmentmodellerCONTRAM
Allmänt Tidsvariation av trafikflödet Representation av trafikenRestid och köer
Val av färdväg och assignment
Översikt över CONTRAMs uppbyggnad
Nya tekniska tillämpningar
FLEXSYT
Segment
Fordon
Konstruktion av vägnätet. Fordonsmodeller Allmänt lNTEGRATlON Simuleringsprocessen Assignment lndata - utdataTRAF-NETSIM
SimuleringsprocessenAssignment
lndata - utdata
AIMSUNZ
Användargränssnittet GETRAM
Simuleringsmodellen AIMSUN2
VägnätsmodellenTrafikmodellen
Trafikregleringsmodellen
Användargränssnitt VTI notat 22-1996 ( D C D m - Ä-b -b h 00 .L O . . . L A -; 4 . 4 4 . 4 4 0 0 0 0 3 0 0 0 0 30 0 0 : N N N N N N N N -* O O O N N N N(
n
ä-b
h
N N N N N NO U O 0 0 0 0 0 0 0 0 m e m m m b m c o c o9
10
Slutsatser Referenser37
38
VTI notat 22-19961 Bakgrund
VTI har en begränsad kompetens beträffande simuleringsmodeller av tätortstrafik, och sedan det blivit allt viktigare att effektivt utnyttja det befintliga vägnätet, kommer simuleringsmodeller att behövas allt mer. Eftersom det är viktigt att inte kunskapsmässigt komma efter andra intressenter har VTI beslutat att börja bygga upp kompetens inom detta område. Behovet av bra simuleringsmodeller är stort, då t.ex. en felsatsning på en ny trafikled kan bli ytterligt kostsam och förhopp-ningsvis kan sådana misstag avvärjas genom simuleringar. VTI har störst behov av att kunna beräkna de av olika åtgärder uppkomna ekonomiska effekter i gatunätet, som exempelvis restider, fördröjningar, kölängder, bränsleförbrukning osv. Vidare vill man kunna använda den till trafikplanering, medan ren trafikstyrning ligger närmare väghållarnas intressen.
2 Översikt
Vi har i första skedet gjort en omfattande litteratursökning och läst en mängd artiklar - de flesta tämligen översiktliga - för att bilda oss en uppfattning om olika modeller och principer. Som en Översikt över befintliga modeller sammanfattar vi här en utmärkt redovisning av David Watling: Urban traffic network models and
dynamic driver information systems , Transport Reviews 1994, Vol 14, No 3, sid 219-246.
2.1 Modellöversikt enligt Watling
2.1.1 Inledning
Den tekniska utvecklingen har försett trafikmyndigheterna med många nya verk-tyg för att påverka resmönster och trafikflöde. Det vanligast formulerade målet för strategierna är att minska trafikstockningarna och utnyttja vägnätet på ett effekti-vare sätt. Det system som har dragit mest uppmärksamhet till sig är dynamisk färdvägsledning och förarinformation i fordonet; systemet bygger påkontinuerlig uppdatering baserad på rådande trafikförhållanden.
Misstag vid uppbyggnaden av dessa stora systern blir sannolikt dyra, därför kan simuleringar spela en viktig roll i sammanhanget. Simuleringens första uppgift är nog att rättfärdiga investeringen, genom att förutsäga de potentiella vinsterna. För det andra behövs simulering vid utformningen av kontrollsystemet, för att avgöra de bästa sätten förimplementering. Slutligen - när systemet är operativt - behövs simulering för att förutsäga trafiktillstånden (realtids-simulering).
Existerande modeller utvecklades huvudsakligen för att beräkna effekterna av långtidsförändringar i vägnätet, avstängningar, enkelriktningar osv. Det är inte självklart, att man med dessa modeller kan hantera detaljerad dynamisk modelle-ring. Watlings första mål är att identifiera de viktigaste drag en nätverksmodell av ett dynamiskt system för förarinformation skall äga.
Översikten rör prediktiva modeller för korttidsförlopp. Dessutom behandlas endast nätverksmodeller; modeller enbart för simulering av enstaka faciliteter -korsningar t.ex. - behandlas ej.
2.1.2 Översikt av existerande modeller
Nationella skillnader försvårar ofta en jämförelse mellan olika modeller. I USA utvecklas ofta informationssystem för motorvägar med olika vävnings- och väx-lingsförlopp samt för styrning av rampflöden. I Storbritannien förekommer många modeller för simulering av cirkulationsplatser, med eller utan signalregleringar.
16 olika karakteristika beskrivs nedan. vilka senare används vid modelljämfö-relserna.
1. [nmaming (Supply. Med vilken detaljeringsgrad representeras trafiken?
Modellerna grupperas enligt tre tämligen vanligt förekommande aggre-gationsnivåer: mikroskopisk, mesoskopisk och makroskopisk. Gränserna mellan dessa grupper är ganska flytande. Generellt sett är de minst detal-jerade, makroskopiska modellerna sådana, som endast predicerar genom-snittligt flöde på länkar under högtrafiktimmar. Inga individuella fordon betraktas, utan trafikflödet betraktas som analogt med en strömmande vätska. Eftersom syftet med dynamiska trafikantinformationssystem är att effektivisera flödet under högtrafiktimmar, är dessa modeller allt för
grova, och ingår inte i översikten. Den högsta nivån av makroskopisk detaljeringsgrad definieras här som de modeller som har möjlighet att representera flödesvariationerna på minutnivå men inte på sekundnivå. Vätskeflödesmodeller, som kan åskådliggöra variationerna på sekundnivå
betecknas som mesoskopiska . En annan form av mesoskopiska
modeller är sådana, där trafikflödet består av individuella oupplösliga grupper av fordon. Vid den högsta upplösningen - mikroskopiska modeller - rör sig individuella fordon enligt grundläggande regler i en
sann simulering av trafikens beteende.
2. Anspråk (Demand). På vilken detaljeringsnivå ligger föramas val av
färdväg? Anspråket kan fördelas på olika sätt, till exempel i klasser
beroende på föramas karakteristika (se 8), eller i tidsintervall (se 4).
Detaljeringsnivån gäller fördelningen av anspråket för en given destina-tion, en given klass och ett givet tidsintervall. Om man till exempel betraktar ett val av färdväg, så har en modell en makroskopisk anspråks-modell, om den enbart predicerar den aggregerade andelen för de alterna-tiva rutterna. De meso- och mikroskopiska nivåerna betraktar däremot explicit valet hos grupper respektive individer.
3. Variation (Variability). Är variationerna från dag till dag för vägnätets
tillstånd eller destinationsönskemål modellerade?
4. Val av färdväg (Route Choice). Är valet av färdväg modellerat? Om så är
fallet, är det dynamiskt , dvs. kan olika vägval göras vid olika avgångs-tider?
5. Avgångstid (Departure time). Är avgångstiden modellerad?
6. Under färd (En route). Är beslut om ändrat vägval undervägs modellerat
för incidentfria trafiktillstånd?
7. Val (Choice). Hur flexibel är modellen i termer av de valprocesser, som
kan selekteras? Exempelvis, är bara trafikantoptimerade (UO) eller
stokastiskt trafikantoptimerade (SOU) tillåtna för att representera
föramas osäkerhet, eller finns det andra möjligheter?
8. Klasser (Classes). Kan mer än en klass av förare definieras? Klasser
bör skilja sig med avseende på:
(a) destinationsefterfrågematrisen; (b) osäkerhet i val;
(c) tillgängligt vägnät;
(d) generaliserad kostnadsdefinition.
9. Kapacitetshämmat val (Capacity-restrained choice). Hämmas föramas
val av kapaciteten i någon utsträckning?
10. Överenssta'mmelse (Consistency). Förarnas val påverkar utnyttjandet av
olika delar av vägnätet, vilket i sin tur påverkar fördröjningarna, vilket påverkar föramas val. Omfattar modellen en korrekt återkoppling, som siktar till en överensstämmelse mellan föramas förutsedda och upplevda fördröjningar?
ll. Dynamisk generering (Dynamic loading). Har modellen möjlighet att generera ankomstflöden, så att fordonen som avgår vid olika tidpunkter interagerar korrekt?
12. Korsningar (Intersections). Kan köer och interaktioner mellan trafik-strömmar i ett antal grundläggande typer av korsningar modelleras? Främst okontrollerad vävning, prioriterade korsningar och trafiksignaler
13. 14.
15. 16.
med fixa tidsintervall. Dessa kan utgöra block för att bygga mer komplexa korsningar.
Dynamiska signaler (Dynamic signals). Kan dynamiska trafiksignaler (fordonsstyrda, datorstyrda, länkade och optimerade) representeras kor-rekt?
Köer (Queueing). Avbildar modellen uppbyggnaden och rörelsen hos en kö längs en länk och möjligheten för blockering av korsningar uppströms (horisontell kö), eller förutsätts alla fordon köa vid stopplinjen (vertikal kö)? Modeller, som utnyttjar vertikal kö, men försöker approximativt ta hänsyn till uppströms blockeringar, benämns diagonala köer .
Incidenter (Incidents). Accepterar modellen data om icke-återkommande incidenter, för att simulera motsvarande fördröjningar?
Incidentrespons (Incidenr response). Om incidenter är tillåtna, vilka förarresponser är tillåtna? Möjligheter är avvikelse , där föraren väljer alternativ väg som respons på synliga effekter av incidenter, eller
'körfältsbyte , där föraren måste söka en lucka i angränsande körfält.
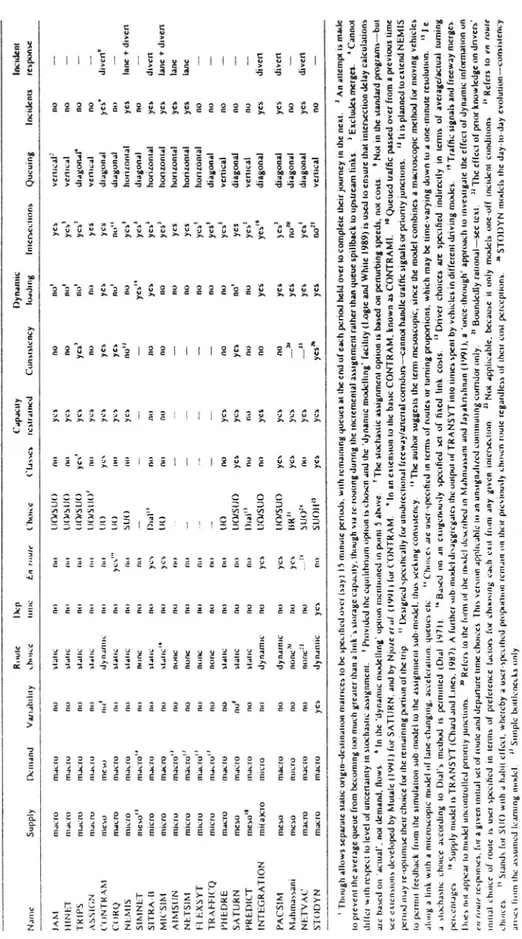
VTI notat 22-1996 N a m e Sup pl y D e m a n d Va rt ab tl it y R i m l c ch oi ce De p tt tt tc En ruui t (' ho tc e Fl ames C ap ac uy re st ra it te d Co ns is te nc y Dyn am ic lo ad tn g In te rs ec ti on s Que ui ng In ci de nt s ln ci de nt V C S P O H S C J AM IHNH T TR WS as mo u CU NT RA hl co no NE NH S SH dN ET mT RA ti sn cs mi AH dS UN Nh TS IM FL EX SY T TR AF HC Q PH ED RE SA TU RN PR ED KH I N T E G R A T l O N P A C S I M M a h m a s s a n i N E T V A C S T O D Y N ma cr o " I J C F O ma cr o " N I L T D me so ma cr o mi cr o nt es o mi cr o mi cr o mi cr o mi cr o mi cr o mi cr o ma cr o me so me so " mi la xr o m e s o m a c r o m a c r o ma cr o ma cr o ma cr o ma cr o me so ma cr o ma cr o ma cr o ma cr o ma cr o ma cr o ma cr o" ma cr o" ma cr o ma cr o ma cr o tn ac ro mi cr o m a c r o l IC l' O H T J C T O m a c r o st at ic st at ic st at ic st at ic dy na mn ; st at ic S I I U C no ne st at ic st at ic " no ne no ne no ne no ne st at ic st at ic Sl ül tC dyn am ic dyn am ic no ne 'v no ne :x dyn an nc (N I no no no yes l l O / S U U [J O/ 51 10 l l O / S U O U O J S U U ' ll l) ll () S U U Di al " U U U 0 U O I S U O Di al n U O / S U O U O / S U O ti tt " s uo " sun ti ye s ye s' rio ye s ye s ye s yes yes 0 0 0 0 ye s ye s ye s' ye s' ,a i no m ye sl no " ve rt ic al : ve rt ical di ag on al ' ve rt ic al di ag on al di ag on al ho ri ro nt al di ag on al ho ri zo nt al ho nwn ta l ho ri zo nt al ho ri zo nt al ho nr on ta l di ag on al ve ni ea l di ag on al ve rt ic al di ag on al di ag on al di ag on al di ag on al ve rt ic al di ve n' la ne + di ve rt di ve n la ne + di ve n la ne la ne di ve n di ve rt di ve rt ' Th oug h al lo ws se pa ra te st at ic or ig in -d es ti na ti on ma tr tc es to be sp ec if ie d ove r (s ay) lS mi nut e pe ri od s. wi th re ma in in g que ue s at th e en d of ea ch pe ri od he ld ave r to co mp le te th ei r jo um ey in th e ne xt . to pr eve nt th e ave ra ge que ue fr om be co mi ng to o muc h gr ea te r th an a li nk 's st or ag e ca pa ci ty. th oug h vi a re -r out in g dur in g th e in cr em en ia l as si gn me nt ra th er th an que ue sp il lb ac k to up st re am li nk s. di l' le r wr th re sp ec t to le ve l of un ce na in ty in st oc ha st ic as si gn me nt . ar e ba se d on 'a ct ua l' , no t de ma nd . fl ows . pe ri od ma y re -o pt im ts e th ei r ch oi ce fo r th e re ma in in g po rt io n of th e tr ip . to pe nn tt fe ed ba ck fr om th e si mul at io n sub mo de l to th e as si gn me nt sub -m od el . th us se ek in g co ns is te nc y. al on g a li nk Wi th a mi cr os co pi c mo de l of la ne -c ha ng tn g. ac ce le ra ti on . que ue s et c ;i st oc ha st ic ch oi ce ac co rd in g to Di al 's me th od is pe rm it te d (D ia l |9 7|) . pe rc en ta ge s '° Ba se d on an exo ge no us ly sp ec if ie d se t of fi xe d li nk co st s. " Sup pl y mo de l ts T R A N S Y T (C ha rd an d Li ne s. l9 ti 7) . A fur th er sub -m od el di sa gg rc ga tc s th e out put of T R A N S Y T in to ti me s sp en t by ve hi cl es in di ff er en t dr ivi ng mo de s. Do es no t ap pe ar to mo de l un co nt ro ll ed pn or tt y Jun ct io ns . ° In th e 'd yn am ic mo de ll in g' op ti on me nt to ne d in po in t 5 ab ove . se e ext en si on s de ve lo pe d by Mut al e (l 99 l) fo r S A T U R N . an d by Nj or e el ul . (l 99 lt fo r (' ON TR AM . ch ot ce s. St an ds fo r S U O wi th a ha bi t ef fe ct , wh er eb y a us er -s pe ci fi ed pr op or ti on fC ll lJ ln on th ei r pr evi ous ly ch oa n ro ut e re ga rd le ss of th ei r co st pe rc ep ti on s. an se s fr om th e as sum ed le ar ni ng mo de l '7 Si mp le bo tt lc nc hs on ly. 2' Bo un de dl y ra ti on al -s ee text . No t ap pl ie ab le . be ca us e it on ly mo de ls on e-of f in ci de nt co nd it io ns . S T O D Y N mo de ls th e da y-to -d ay evo lut io n-.c on si st en cy 'A n at te mp ti sm ad e 'E xc lud es me rg es . 'C an no t * Pr ovt de d th e eq ut li hn um op ti on is ch os en .t nd th e 'd yn am ic mo de ll in g' fa ci li ty (L og ic an d Wh it e l9 89 ) is us ed to en sur e th at in te rs ec ti on de la y ca lc ul at io ns ' Th e st oc ha st ic as si gn me nt op ti on is ba se d on pe rt ur bi ng sp ee ds . no t co st s. ' ln an ext en si on to th e ba si c C O N T R A M . kn own as C O N T R A M I . " De si gn ed sp ec tt ic al ly fo r un id ir ec ti on al fr ee wa y/ an cr ia l co m' do rs -we an no t ha nd le tr af fi cs ig na ls or pr io ri ty jun ct io ns . Th e aut ho r sug ge st s th e te rm me so sc op ic . si nc e th e mo de l co mb in es a ma cr os co pi c me th od fo r mo vi ng ve hi cl es Ch oi ee x .tr e us er -s pe Ct he d in te rm s of ro ut es or tur ni ng pr op on io ns . wh ic h ma y be ti me -va ryi ng do wn lo a on e«m in ut e re so lut io n. 1 e. " Dr ive r ch oi ce s ar e sp ec if ie d in di re ct ly in te rm s of ave ra ge /a ct ua l tur ni ng 'N ot in th e st an da rd pr og ra ms -b ut '° Que ue d tra ffi c pa ss ed ove r fr om a pr evi ous ti me It is pl an ne dt oe xt en d NE Ml S " Tr af fi c si gn al s an d fr ee wa y me rg es . 3' Re fe rs to th e fo rm of th e mo de l de sc ri be d in Ma hm as sa nt an d la ya kn sl tn an (l 99 l ), rt 'o nc e-th ro ug h' ap pr oa ch to in ve st ig at e th ee ff ec t of dyn am ic in fo rm at io n on (It ro ut e' re sp on se s. fo r a gi ve n in it ia l se t of ro ut e an d de pa rt ur e ti me ch ot ce s Th is ve rs io n ap pl ic ab le to an un si gn al ir ed co mm ut in g co md or on ly. in it ia l ch oi ce of ro ut e is us er -s pe ci fi ed in te rm s of pr ef er en ce fa ct or s fo r ch oo si ng ea ch exi t fr om an y gi ve n in te rs ec ti on . Th e ef fe ct of pr io rk no wl ed ge on dr ive rs ' Re fe rs to en mur : Tabell 1 . Oversikt av modellattribut.
Watling indelar modellerna i tabell 1 i tre klasser.
1. Rena trafikfördelningsmodeller (assignment models): JAM, HINET, TRIPS,
ASSIGN, CONTRAM och CORQ. De fyra första är 'statiska , i så måtto,
att destinationsmatrisen antas vara konstant; avsikten är att beräkna ett enda,
kapacitetshämmat färdvägsval för simuleringsperioden, via inkrementär fördelning . Denna fungerar så, att destinationsmatrisen delas upp i av användaren specificerade delar. Dessa delar laddas sedan successivt in i nätet med motsvarande successiva beräkningar av fördröjningarna. Denna metodik har vissa svagheter, som bl.a. leder till en underskattning av för-dröjningama.
CONTRAM undviker dessa problem, genom att tillåta en finare definition av destinationsmatrisen - som i typfallet gäller för S-minuters intervall - allt medan hela högtrafikperioden studeras. Modellen arbetar med inkrementär fördelning: små paket omfattande ett till tio fordon med samma destina-tion inom tidsintervallet behandlas i varje tidsinkrement. För varje tidsinter-vall beräknas fördröjningar och köer. När alla paket beräknats, upprepas hela processen iterativt, för att förhoppningsvis konvergera mot dynamisk jämvikt. CONTRAM genomgår en kontinuerlig utveckling, bl.a. kan man numera simulera incidenter, som ger ändrade vägval undervägs. Man kan också beräkna bränsleförbrukning och olika miljöeffekter.
2. Mikrosimuleringsmodeller, som bygger på car-following, körfältsbyten och gap acceptance regler: NEMIS, SIMNET, SITRA-B, MICSIM, AIMSUN,
NETSIM, FLEXSYT samt TRAFFICQ. Dessa modeller betraktar
individu-ella fordons rörelser i vägnätet för givna vägval. Modellerna har hög detalje-ringsgrad när det gäller uppbyggnaden av köeroch blockeringar, modifie-ringar i vägnätet och komplexa signalstrategier.
3. Denna kategori överlappar den föregående, och omfattar modeller som före-nar fördelning och mikrosimulering: NEMIS, SITRA-B, PHEDRE, SATURN, PREDICT och INTEGRATION. Det vanliga temat är att använda en fördelningssubmodell för att predicera Vägvalet och en simule-ringssubmodell för att förflytta trafiken genom vägnätet. Förutom i INTE-GRATION används statiska vägvalsmodeller. I INTEINTE-GRATION har förarna fullständig kunskap om tillståndet i nätet vid avgången, men kan inte förutse förändringar undervägs. Denna modell skiljer sig från CONTRAM, där förarna fattar beslut vid varje länk/korsning, på grund av den aktuella trafik-suuaüonen.
2.1.3 Nya infallsvinklar
Forskningen de senaste tjugo åren har haft en inriktning mot jämviktsproblemen vid vägval, och på senare är mot det så kallade dynamiska jämviktsfördelnings-problemet (dynamic equilibrum assignment problem). Watling anser emellertid, att denna forskning mest varit av akademiskt intresse. Nya infallsvinklar rör sig huvudsakligen om beteendemodeller för föramas anspråk på färdväg. En tanke-gång är att man är lojal mot sitt gjorda val, och endast ändrar sig om ett givet trös-kelvärde på reskostnaden överskrids. En annan idé är att ha olika abstraktions-nivåer för det verkliga vägnätet. Ju närmare man kommer målet, desto större blir detaljeringsgraden. Ytterligare idéer är att simulera evolutionen dag för dag, där förarna förutsätts lära sig och göra nya val.
2.1.4 Framtida forskning
Watling anger sammanfattningsvis att - för att förbättra vägnätsmodellerna och förarinformationssystemen - behövs studier beträffande:
(a) vilken information förare behöver, hur de använder den och hur den
varie-rar med föramas karakteristika;
(b) de faktorer och regler som styr förarnas vägval undervägs, både med och utan dynamisk information;
(c) föramas respons på information som inte är optimal för deras egen resa
(t.ex. för att leda trafiken förbi miljökänsliga områden);
((1) effekten av vana vid förarval, särskilt beträffande före- och efterstudier
av informationssystem;
(e) förarbeteende när det gäller responsiva kontrollsystem, inklusive trafiksig-naler och information;
(f) på vilket sätt förare integrerar olika kunskapskällor.
2.2 Egen litteraturstudie
Vi utförde i första skedet en omfattande litteratursökning och läste en mängd artiklar - de flesta tämligen översiktliga - för att bilda oss en uppfattning om olika modeller och principer. Därefter valde vi att koncentrera oss på en beskrivning av fyra mikroskopiska modeller: FLEXSYT, INTEGRATION, TRAF-NETSIM och AIMSUNZ. Dessutom presenteras en mesoskopisk assignmentmodell, CON-TRAM.
3 Allmänt om assignmentmodeller
När man i vanliga modeller för fördelning av trafiken (assignmentmodeller) matar
in data om trafikanspråket för ett nätverk, ofta i form av en O-D-matris, resulterar
det i flöden på länkarna och dessutom erhålls exempelvis: 1. primärt:
0 bra mått på hur nätverket fungerar på aggregerad nivå, t.ex. totala flöden eller busstrafikens totala årsintäkter
skattningar av zon-till-zon-kostnader för givet trafikanspråk identifiering av länkar med mycket trafikstockningar. . sekundärt:
skattningar av vilka färdvägar som används för varje O-D-par analys av vilka O-D-par som använder en viss länk eller färdväg
information om förväntad riktningsfördelning när man utformar framtida korsningar. . . . N 0 0
De grundläggande indata som fordras för assignmentmodeller är:
0 En O-D-matris med skattat trafikanspråk. Vanligtvis används olika matriser för rusningstrafik och lågtrafik i tätorter med områden där trafikstockningar är vanliga, men i mindre trafiktäta tätortsområden kan ibland en 24-tim-marsmatris räcka.
0 Ett nätverk med länkar och beskrivning av deras egenskaper med bl.a. has-tighets-flödeskurvor.
0 Principer eller regler för val av färdväg.
Den grundläggande förutsättningen i assignment är antagandet om en rationell förare, dvs. en förare som väljer den väg som han förväntar sig ha den minsta kostnaden. En rad faktorer antas påverka valet av färdvägen, bl.a. restid, avstånd,
kostnad (för bensin, vägtullar och annat), vägarbeten, köer och trafiktäthet. Sist
men inte minst lär vanan ha stor inverkan. Det är svårt att ta med alla faktorer för att beskriva den generella kostnaden, så man brukar approximera med att val av färdväg bestäms av restid och reskostnad, och ofta används en viktad summa av dessa. Undersökningar har gjorts huruvida förare verkligen väljer den bästa vägen enligt principen att minimera restid och reskostnad. Överensstämmelsen mellan observerat vägval och objektivt bästa väg verkar vara ganska dålig, endast omkring 60-80 0/0. Därför verkar det vara vanskligt att lita alltför mycket på resultat från assignmentmodeller om man inte bara betraktar stationära förhållan-den, med förare med lång erfarenhet av sina möjliga färdvägar och där inga nya vägarbeten, oväntade stockningar eller olyckor inträffar. Alternativt kan man för-utsätta att föraren har perfekt information om den aktuella trafiksituationen och får råd om bästa färdväg, Lex. via en display i bilen eller via skyltar med kontinuerligt förnyad information eller dylikt. Det förutsätts då också att tillräckligt många väl-jer den föreslagna vägen.
När man fördelar trafiken kan man göra det i huvudsak efter fyra olika prin-ciper: dels om man har med ett slumpmässigt inslag i val av färdväg eller inte, och
dels om man tar hänsyn till om länkarnas kapacitet eller inte, se tabell 3.1.
Tabell 3.1 Principerför trafzkfördelning.
Är stokastiska effekter inkluderade?
nej ja
Är begränsningar nej Allt-eller- Rent stokastisk
i kapaciteten inget-fördelning fördelning
inkluderade? ja Wardrops Stokastisk
förar-jämvikt jämvikt
Den enklaste formen för val av färdväg är allt-eller-inget-fördelning. Med detta menas att man inte räknar med någon överbelastning på vägnätet, att alla förare använder samma faktorer för att välja väg samt att alla uppfattar och bedömer dem lika. Att inte ta hänsyn till länkarnas kapacitet betyder att alla kostnader för län-karna är fixa, oberoende av flödet. Alla förare som ska från punkt i till punkt j uppfattar samma rutt som den optimala och alla fordon fördelas då på denna och inget fordon på någon annan väg. Dessa antaganden är antagligen ganska rimliga i vägnät som inte är så belastade och där det finns få alternativa vägar och där kost-naderna är väldigt olika.
Stokastiska metoder för trafikfördelning betonar variationen i förares uppfatt-ning om kostnader och det komplexa mått de försöker minimera (tex. en kombi-nation av reslängd, restid och generella kostnader). Stokastiska metoder måste därför ta hänsyn till alternativa färdvägar mellan två punkter och inte enbart den bästa (sett ur trafikplanerarens perspektiv). En typ av metoder är de som baseras på simulering och dessa brukar vanligtvis bygga på följande antaganden:
0 För vare länk i ett vägnät skiljer man mellan objektiva kostnader (trafikplanerarens skattning av kostnaden) och subjektiva kostnader (den enskilde förarens uppfattning om kostnaden). Det antas vidare att förarens subjektiva kostnad följer en sannolikhetsfördelning (Lex. normalfördelning) med den objektiva kostnaden som medelvärde.
0 Fördelningama för förarnas subjektiva kostnader är oberoende.
0 Förama väljer den väg som minimerar den subjektiva kostnaden för färd-vägen, som är en summa av de individuella länkkostnaderna.
För varje element i O-D-matrisen delas alla förare som ska från en viss punkt till en annan upp i N stycken grupper där varje grupp tilldelas en egen färdväg. För varje sådan grupp beräknas för varje länk den av en viss förare uppfattad kostnad genom att sampla från fördelningen för förarens subjektiva kostnad. Slutligen summeras länkarnas kostnad ihop. Gruppen som ska från punkt i till punkt j för-delas på den färdväg som har den minsta uppfattade kostnaden och detsamma görs för alla par av i och j. Detta upprepas för alla grupper (N stycken) i alla O-D-ele-ment. N väljs så att det blir en tillräcklig spridning i alternativa färdvägar men inte så stort så att beräkningstiden blir för lång. Nackdelar med denna metod är att förarnas subjektiva kostnader för länkarna oftast inte är oberoende och att man inte tar någon hänsyn till flödet. Fördelarna kan vara att det blir en någorlunda spridning på färdvägama, att det är relativt lätt att programmera och att det inte krävs uppgifter om sambandet mellan flöde och hastighet.
Om man bortser från det stokastiska (dvs. man antar att alla förare uppfattar kostnaderna på samma sätt) och bara använder begränsningen i kapaciteten för att
generera vägval får man en annan typ av modeller som approximerar de
jäm-viktsvillkor som formulerades av Wardrop (1952):
Under jämvikt kommer trafiken att fördela sig i hårt belastade vägnät så att alla färdvägar för varje element i O-D-matrisen har lika och minimal kostnad medan alla oanvända vägar har större eller lika kostnad.
Detta används som modell för att beskriva beteendet hos individuella förare att minimera sina egna kostnader, dvs. förarens jämvikt(users equilibrium, UE). Wardrops andra jämviktsvillkor används som princip när trafikplaneraren ska utforma trafikmiljön för att minimera reskostnader och därigenom uppnå en social jämvikt (social equilibrium):
Under jämvikt ska trafken fördela sig i hårt belastade vägnät så att medel-kostnaden (eller den totala medel-kostnaden) minimeras.
Slutligen återstår fallet där man tar hänsyn till både variationen i uppfattade
kostnader och vägamas kapacitet vid Vägvalet. Denna jämvikt kallas stochastic user equilibrium (SUE):Varje förare väljer färdväg med den reskostnad som uppfattas som minst, dvs. med SUE har ingen förare en färdväg med mindre uppfattad kostnad än andra förare med samma utgångspunkt och destination och därför blir alla kvar vid sin valda väg.
Modeller med fördelningsprinciper enligt SUE är på många sätt bra men kon-vergensen för algoritmema kan ett stort praktiskt problem, [Ortüzar et al. 1990, sid 279].
4 CONTRAM
CONTRAM är en engelsk assignmentmodell utvecklad av Transport and Road Research Laboratory för att användas vid utformning av stadstrafikreglering. Utdata kan användas för ekonomiska bedömningar och trafikplanering.
4.1 Allmänt
CONTRAM (CONtinuous Traffic Assignment Model) är en datorbaserad
fördel-ningsmodell vilken predikterar flöden, köer och fordonens färdväg i ett nätverk av gator. Den modellerar uppkomst och avveckling av trafikstockningar under till-fälligt övermättade betingelser som t.ex. under rusningstid. Fordonen är vanligtvis fördelade så att de tar den väg som har den kortaste restiden (minimum joumey time) genom gatunätet eller eventuellt den billigaste vägen (minimum cost route). Undantag görs för fordon med fixa resvägar som t.ex. bussar och leveranser. CONTRAM tar alltså hänsyn till trafikflödets inverkan på framkomligheten och låter alla förare ta den optimala vägen men har inte med någon slumpterm i väg-valet på grund av att olika förare uppfattar reskostnaden olika. Med andra ord används Wardrops user equilibriumk UE, enligt ovan.
I CONTRAM modelleras tre klasser av fordon: bilar, bussar och lastbilar. Likaså förekommer en rad olika typer av korsningar inklusive signalreglerade, cirkulationsplatser och lämna företräde. Trafiksignaler har oftast fixa tidsplaner men även koordinerade signaler kan användas. Det är möjligt att införa förbjuden infart i gatunätet.
4.2 Tidsvariation av trafikflödet
Tidsvariationen av trafikbetingelserna modelleras i CONTRAM genom att dela upp den analyserade tidsperioden i en serie efterföljande tidsintervall. Trafikbe-lastningen på gatunätet definieras av en uppsättning tidsvarierande flöden, ett för varje tidsintervall och för varje element i O-D-matrisen. Tidsintervallen ska vara tillräckligt korta för att representera den underliggande tidsvariationen men inte så korta att de bara visar brus i flödet. Speciellt viktigt är det med rätt längd på inter-vallen när belastningen är nära eller överskrider länkens kapacitet.
4.3 Representation av trafiken
Alla fordon som tillhör samma element i O-D-matrisen (dvs. utgår från samma plats och som har samma destination) behandlas inte individuellt utan samlas ihop i grupper (paket), och varje paket tilldelas färdvägar oberoende av varandra genom nätverket. Dessa paket är sedan ökningen av det kumulativa flödet på länkarna. Paketens färd genom nätverket beräknas enligt statistisk teori, köteori och genom relationen mellan flödesökningar, korsningars kapacitet och restiden från punkt-till-punkt. CONTRAM är således en högupplöslig, tidsberoende modell baserat på trafikflödesinteraktion, snarare än detaljerad simulering av individuella fordons resväg och interaktioner i realtid.
När man fördelar trafiken fås alla fordon i ett paket att ta samma färdväg med den kortaste restiden alternativt minsta kostnaden med hänsyn taget till fördröj-ningarna i varje ingående korsning. Olika paket med samma utgångspunkt och destination kan ha olika färdvägar. Grupperingen av fordon i paket kan ses som
en process för vilken beteendet hos ett fordon i paketet tas som typiskt för beteen-det hos de andra fordonen i beteen-det paketet och beteen-detta reflekterar tendensen för förare som reser från samma ställe och har samma destination vid ungefär samma tid-punkt att ta samma rutt, eftersom de influeras i sina val av våg av liknande trafik-betingelser. Man får inte glömma det statistiska sättet som paketen bidrar till medelflöde och köberäkningar, och inte se paketet som en kedja av bilar som åker tillsammans genom gatun'atet. Anledningen till att gruppera bilarna är förstås att minska datortiden.
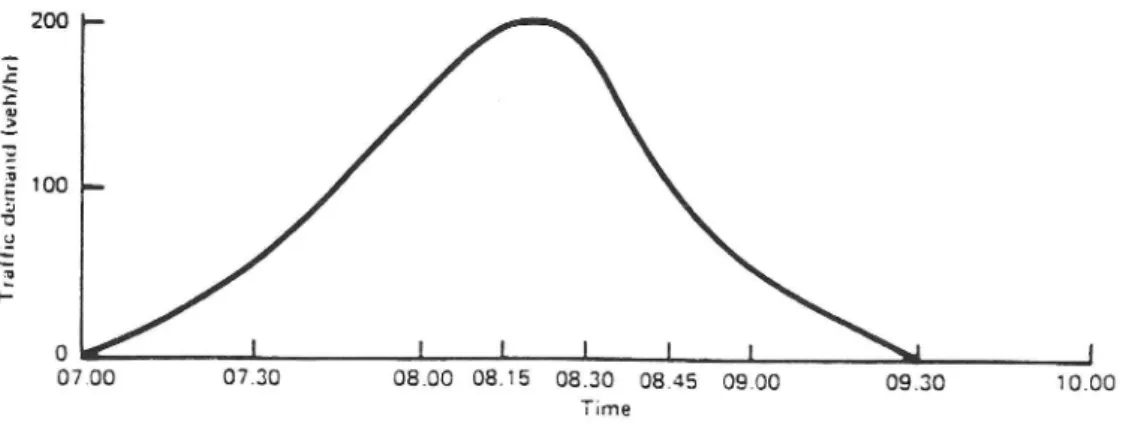
Trafikbelastningen i ett nätverk består alltså av en uppsättning fixa par av utgångspunkter och mål (origin - destination) där belastningen vanligtvis varierar med tiden. Betraktar man t.ex. tidsperioden 7.00 till 10.00 i figur 4.1 .a ser man hur flödet varierar med tiden. Detta kan diskretiseras i ett histogram (figur 4.1.b) och beskriver tidsberoendet i O-D-elementen (figur 4.1.c). I figur 4.2 ser vi hur trafi-kanspråket representeras av ett antal paket med fem fordon i varje.
Man har två sätt att dela in fordon:
0 fixa paketstorlekar för varje givetelement i destinationsmatrisen men olika storlekar för olika element. Valet beror på belastningen på olika element i O-D-matrisen och på olika storlekar på tidsintervallen, (helst kring ca 5 paket/intervall) (figur 4.2). För vissa O-D-par kan paketen innehålla 20
fordon och andra bara 1 (t.ex. bussar).
varje paketstorlek för givna element i destinationsmatrisen varierar både inom och mellan varje tidsintervall.
200
E
4:: U 3. §3 100 5 'o .9#5_
p_ 0 l l l 1 L l l 07.00 07.30 08.00 08.15 08.30 08.45 09.00 09.30 10.00 TimeFigur 4.1a Tidsvarierande trqukanspråk från utgångspunkt A till
destina-tion B.
r 1%; E Eå, *x 5 :° '00 " å .__. E ?J C] 0 I J 07.00 07.30 08.00 08.15 08.30 08.45 09.00 09.30 10.00 Time
Figur 4.1b Representation av trafzkanspråket som ett flödeshistogram.
Time mtervaa 1 2 3 4 5 6 7 8
Demand flow 30 100 180 200 140 60 20 0 (veh/hr)
Figur 4.1c Tia'svarierana'e matriselemenrför rrafzkanspráketfrån A till B.
Packet size for O-D demand A- 8 = 5 vehs
1 1 _ i i _1 09.30 10.00
..hLH 07.30 08.00 08.15 08.30 08.45 09.00 Time Pa ck et si ze (ve n) 07.00
Figur 4.2 Starttiderför paket motsvarande trafzkanspraker ifzgur 4.113.
4.5 Restid och köer
Restiden för ett fordon (paket) längs en länk består av tre komponenter: den tiden man förflyttar sig med önskad hastighet (cruise time, tcr), tiden som uppkommer genom geometrisk fördröjning ( geometric delay time, tgd) och tid i kö (queue
time, tq) dvs.
tres= tcr + tgd +tq
där tcr är flödesoberoende och tgd är den komponenten av fördröjningen som
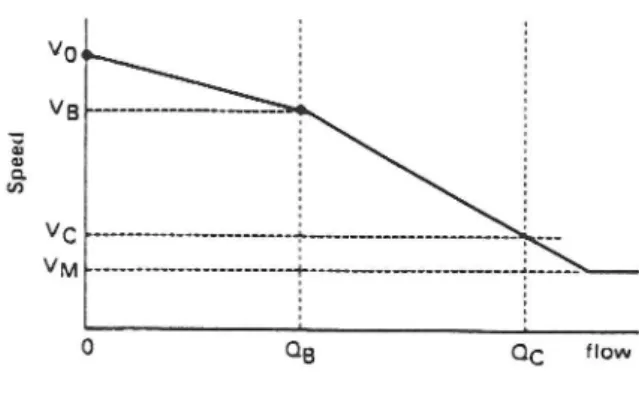
beror av retardation och acceleration i korsningar (exklusive kötid). Alternativt kan man modellera restiden som
tres= (speed/flow) + tgd + tq
där t(Speed/n0w) är den alternativa cruise time beräknad med hänsyn till rela-tionen mellan flöde och hastighet, se figur 4.3.
CONTRAM har en diagonal kömodell, som nämns i avsnitt 2.1.2.
V0 4 \ §-VB ' S p e e d Vc VM
Figur 4.3 Relationen hastighet/flöde.
4.6 Val av färdväg och assignment
Algoritmen för val av färdväg i CONTRAM är en modifierad form av en algoritm av Dijkstra [Taylor, N.B., 1990] där man vid varje punkt söker att minimera summan av den faktiska kostnaden från startpunkten till denna punkt och den skattade minimala kostnaden från denna punkt till destinationen, där den skattade minimala kostnaden till destinationen beräknas med en algoritm av D Esopos
[Taylor, N.B., 1990].
Algoritmen för att fördela trafiken illustreras med flödesschemat i figur 4.4 hämtat ur CONTRAM: Structure of the Model, sid 1 1.
Read Netw0rk data Read Traffic demand data and set up Packet Route fiie Load Traffic on to network
(ist iteration) A i I Take ist packet Take next L packet r V
Subtract flow on iinks, due to packet, from previous route
V
Recalculate queues on links affected by previous route
7
A Assign packet to new minimum journey
time route (taking into account deiays enc0untered by packet)
1
Add flow due to packet to links on new route and recalculate queues affected by new route
A Figur 4.4 VTI notat 22-1996
Any more packets
iterationsMore
Assignment procedure i CONTRAM
V
4.7 Översikt över CONTRAMs uppbyggnad
I figur 4.5 ses en Översikt över modellen med indata, assignment och utdata. INPUT
Data om tidsvarierande trafikanspråk
l
l Paket l
l
Fördelning enligt kortaste restid eller minsta kostnad
7 \
FärdvägarData om tid och gatunätet
Köer
(fördröjningar på länken)
kJ
Flöden *'Beräknar tidsvariation i flöden, köer och färdvägar . . . - - - - Iterativ process
Konvergens- :
parametrar ' "
OUTPUT
" 0 Summering av restider, reslängder, medelhastighet och
bränsleförbrukning
0 Flöden, köer, fördröjningar, andel tid av mättnad, totalt spenderad tid, förekomst av blockning och medelhastighet för varje länk
0 Flöden, köer, medelkötid och medelhastighet på länkarna för varje tidsintervall
0 Svängning i korsningar för varje tidsintervall 0 Information om färdvägar
0 Medelhastigheten för punkt-till-punkt i destinationsmatrisen
Figur 4.5 Schema Över CONTRAMS uppbyggnad.
4.8 Nya tekniska tillämpningar
Modellering av nätverk spelar en viktig roll i utvecklingen av ny teknik som Advanced Transport Telematics (ATT) system, som blivit implementerat i det europeiska Drive-projektet. Flera förbättrade versioner av CONTRAM har utvecklats och tillämpats i olika ATT-projekt. T.ex. har MCONTRM utvecklats av TRL för att modellera motorvägar och vägnät mellan städer och använt Variable Message Signs (VMS) och deras effekt på förarnas val av färdväg, bl.a. mellan London och Paris (PLEIADES-projektet). Ett annat 'ATT-projekt i tätort är EUROSCOUT-systemet i Berlin där man använder Dynamic Route Guidance (DRG). Förare som använder systemet har en utrustning i bilen som guidar dem till deras destination via en optimal rutt som tar hänsyn till den rådande och pre-dikterade trafiksituationen. Tvåvägskommunikation mellan bilar och infrastruktu-ren (t.ex. via trafikfyrar vid vägkanten) ger dynamik i systemet.
Universitetet i Southampton har vidareutvecklat CONTRAM till en modell med vägvisning (route guidance) kallat RGCONTRAM. Tonvikten har lagts vid implementeringen av nya beteendemodeller som beskriver hur förarna reagerar på route guidance och på att modellera situationer som uppkommer t.ex. vid trafik-olyckor. Förare som ankommer till nätverket delas in i olika kategorier huruvida de guidas eller inte och om de känner till vägnätet eller inte. Varje förarkategori antas följa en egen princip när de väljer färdväg. Man inför här att förare väljer den väg som de uppfattar som bäst snarare än den optimala och man lägger här in ett slumpfel i Vägvalet, vilket innebär SUE enligt ovan. Föramas vägval beräknas vid varje korsning, beroende på förarkategori, och förarna kan acceptera eller möjligen förkasta eventuell guidning eller reagera på ovanliga situationer som t.ex. svänga av om det dyker upp en oväntad kö nedströms. Man kan antingen använda vanliga jämviktsprinciper vid fördelningen av trafiken eller välja en modell som lämpar sig för att analysera speciella dynamiska händelser som t.ex. trafikolyckor. Nedan nämns några av de möjligheter för att modellera sådan dynamik som finns i RGCONTRAM:
0 Uppdelning mellan guidade och icke-guidade förare. 0 Andel guidade förare.
0 Val av strategi för vägval för icke-guidade förare -°user Optimum, (dvs. perfekt vägval)
- user sub-Optimum (dvs. inkluderat fel i vägval)
-fixt vägval
' °
-fixt vägval utom då förare träffar på oväntadeköer Val av strategi för vägval för guidade förare
- user Optimum (dvs. perfekt guidning)
- user sub-optimum ° (dvs. inkluderat fel i guidning) -guidning m h a trafikfyrar (med valfri uppdateringsfrekvens) 0 Prognoser av restider för beräkning av färdväg
Procedurer för att modellera incidenter (plats, varaktighet, hur allvarlig) Ett exempel på tillämpningar av RGCONTRAM är ett DRIVE-projekt i London, Lyon, Amsterdam, München och Dublin. Där har man sökt utvärdera ATT-produkter för att behandla DRG-relaterande spörsmål som restidsprognoser, handhavande av incidenter och nätverksdesign.
5 FLEXSYT
FLEXSYT (FLEXible traffic network Simulation studY Tool) är ett holländskt
datorprogram utvecklat av the Dutch Ministry of Transport, Public Works and Water Management, Transport Research Centre, Rotterdam. Avsikten är att stu-dera effekten av olika trafikplaneringstekniska åtgärder och för att simulera trafik på mikroskopisk nivå. Fordon rör sig genom vägnätet på slumpmässig basis och restidema beräknas. På detta sätt är det möjligt att undersöka hur nätverket bör se ut med avseende på korsningarnas läge och uppbyggnad, antal körfält och längden på dessa, effekten av bussfält osv.Det är också möjligt att undersöka olika alter-nativ att styra trafiken, som t.ex. fixa tidsplaner för trafiksignaler, fordonsstyrda eller flödesberoende kontrollstrategier.
5.1 Segment
Ett segment är en gatusektion som består av ett körfält och fordonen simuleras att åka genom gatunätet via de separata segmenten. För varje segment måste man beskriva dess egenskaper, t.ex. om segmentet har:
0 en osignalerad korsning, där en del av trafiken måste lämna företräde. 0 zoner där inga köer får förekomma.
0 stopplinjer för signaler. 0 detektorer.
0 busshållplats eller lastzon.
Dessutom måste man ange fördelningen för trafiken som går från ett segment till ett annat, Lex. proportionen av trafiken som svänger i en korsning.
En speciellt typ av segment är den som ligger mellan korsningar, vilken är den delen av vägen som inte direkt påverkas av situationen i korsningen. Hur fordonen beter sig på dessa s.k. intemodsegment anses mindre viktigt och här används en
förenklad modell (dvs. utan acceleration och retardation), för att förkorta
simule-ringstiden. Internodsegmenten har mer än ett körfält i samma riktning.
5.2 Fordon
I FLEXSYT finns åtta fordonsklasser representerade och dessa är: 1. personbil . lätt lastbil . tung lastbil .buss . spårvagn .cykel . fotgängare
. samåkningsfordon (carpool vehicle).
O O N O U ' I -F ÄU J N
Snabb trafik (klass 1-5 och 8) som kör på intemodsegment och långsam trafik (klass 6-7) har ett väldigt förenklat stopp/kör -beteende, vilket innebär att fordon kör utan acceleration eller retardation och står antingen stilla eller kör med önskad hastighet.
The Dutch Ministry of Transport, Public works and Water Management har använt sina standardfordon för att skatta accelerationen och retardationen för de
olika fordonstypema för snabb trafik och likaså har man skattat längden. T.ex.
ansätts accelerationen för personbilar till 2,0 m/sz, retardationen till 3,0 m/s2 och
längden 5 m och motsvarande för lätta lastbilar blir 0,6 m/sz, 2,0 m/s2 respektive 9 m. Dessa skattade värden kan bytas ut men används om inga andra anges. För-utom att varje fordonstyp har en viss skattad acceleration och retardation får varje simulerat fordon även en förarberoende accelerations- och retardationskomponent, se nedan. Långsam trafik som cyklister och fotgängare ansesinte ha någon accele-ration/retardation eller längd.
Genom att bilda ett huvud och en svans på varje fordon kan man i en simule-ring ta hänsyn till fordonets längd. Om ett fordon befinner sig på gränsen mellan två segment kommer huvudet att vara i ett segment och svansen i ett annat. Om ett fordon har stannat så kommer bakomliggande trafik att blockeras, precis som i verkligheten.
När ett fordon genereras förses detockså med en parameter som anger hur pas-sivt eller aktivt föraren reagerar på trafiken. Denna förarparameter påverkar fordo-net angående:
0 acceleration och retardation, där en aktiv förare accelererar och bromsar häftigare än en passiv. Den mest aktive föraren har en accelera-tion/retardation som är 10 % större än medelvärdet, och den mest passive
10 % mindre.
0 tidlucka, där den aktiva har en kortare tidlucka till framförvarande bil. Tid-luckans variation är som mest 10 %.
0 önskad hastighet, som är den hastighet ett fritt fordon håller på ett visst segment. Den önskade hastigheten är given för varje segment, likaså den förarberoende avvikelsen som gör att den aktiva föraren önskar hålla en högre hastighet än den passive på samma segment.
0 osignalerade korsningar. En aktiv förare beslutar sig tidigare än en passiv att köra vid väjningsplikt. För varje osignalerad korsning måste en genomsnitt-lig tidlucka (gaptime) och en proportionell avvikelse från denna anges. FLEXSYT är ingen car-following-modell, utan en kapacitetsmodell (capacity model). Fordonen rör sig längs segmenten baserat på segmentens kapacitet där hänsyn tas till andra fordon, t.ex. en snabb bil bromsar om den närmar sig en lång-sammare. Bilarna kör med individuella hastighetsanspråk, men om ett snabbare fordon hamnar bakom ett långsammare och omkörning inte är möjlig, lägger sig
den snabbare bilen efter med en minimal tidlucka (med en viss variation som
anges ovan) som i sin tur bestäms av segmentets kapacitet. Med andra ord kan det ses som en mycket förenklad car-following-modell där den efterföljande snabba bilen skuggar den långsamma med en viss fördröjning. Denna modell kan vara tillräcklig för att beräkna genomsnittliga reshastigheter, medelkölängder osv. men kan möjligen vara för grov för att beräkna emissioner som i högsta grad beror av hastighetsvariationen.
5.3 Konstruktion av vägnätet.
När man konstruerar sitt nätverk av gator och vägar gör man det på två nivåer; dels på en mer allmän nivå där bl.a. trafiken genereras och dels på en mer detalje-rad nivå där man delar in segmenten i vägnätet i grupper hörande till olika kors-ningar.
Trafiken genereras enligt en Poissonprocess av generatorer i noder i vägnätets ytterkanter. En sammansättning med olika typer av snabba fordon kan användas som ny fordonstyp för att enkelt generera trafikströmmar, där det naturligtvis är viktigt att ange proportionen av ingående fordonstyper.
Till varje generator kan en viss resrutt kopplas, och det antas att det är kollek-tivtrafik som kommer ur denna. Till dessa fordon kan man också ange en lista med de stopp som ska göras under fordonens rutt genom gatunätet.
På korsningsnivå finns information om t.ex. signalreglering, svängningspro-portioner för varje fordonsklass, och placering av eventuella busshållplatser och detektorer.
5.4 Fordonsmodeller
Som sagts ovan ankommer fordon i utkanten avvägnätet via generatorer. Använ-daren anger ett medelflöde och för att återspegla verkligheten där tidluckorna mellan fordon är olika genereras trafiken enligt en Poissonprocess med det aktu-ella medelflödet som intensitet. Kollektivtrafiken däremot ankommer inte helt slumpmässigt men att förutsätta helt regelbundna turer är heller inte realistiskt. Användaren kan därför lägga på en slumpterm på ankomsttiden där man anger en maximal avvikelse.
Köfria zoner är ett område där inga bilar får stanna. Detta simuleras genom att placera en stopplinje vid slutet av segmentet framför den köfria zonen. Denna linje är standardmässigt öppen men stängs så fort huvudet på ett fordon har passerat
denna, vilket medför att bakomvarande fordon inte kan köra in i zonen. Linjen
öppnas så fort hela fordonet (inklusive svansen) lämnat området.
Omköming är bara möjlig på intemodsegment. Användaren måste ange vilken hastighetsskillnad som måste till innan omkörning kan tillåtas. Dessutom kan omkörning bara äga rum om den hinner avslutas inom segmentet.
Vid slutet av varje segment gör varje fordon ett (slumpmässigt) val av fortsatt färdväg. Mekanismen för vägval vid varje korsning tar hänsyn till bl.a. följande när nästföljande segment skall väljas:
0 Om segmentet är tillåtet för fordonet ifråga (anges av användaren). T.ex. kan på vissa segment all tung trafik vara förbjuden.
0 Beroende på från vilket håll fordonet inkommer väljs slumpmässigt en färdriktning ut som beror av trafikflödesfördelningen för korsningen. För fordon med fasta rutter är Vägvalet förstås deterministiskt.
0 Vid cirkulationsplatser ser man till att det tilldelade segmentet nås direkt utan att först åka i cirklar.
Ett fordon kan 'andra sitt vägval om en konflikt med ett annat fordon uppstår och det finns ett alternativt segment.
Information om trafiken i nätverket fås via olika typer av detektorer: selektiva detektorer som anger om ett fordon har passerat, hastighetsdetektorer som anger fordonets hastighet och detektorer som påvisar närvaro av ett eller flera fordon (finns även för fotgängare och cyklister.)
5.5 Allmänt
FLEXSYT kan användas för simulering av trafik både i tätort och på lands-väg/motorväg. Även ramp metering kan hanteras. Modellen kan behandla 10 000 fordon samtidigt i vägnätet.
För att få statistiskt säkra resultat om t.ex. kölängder, medelhastigheter osv. måste simuleringen upprepas och dessa värden beräknas för varje delsimulering. I slutet av varje delsimulering visas statistik på skärmen och simuleringen kan eventuellt avbrytas i förväg om man uppnått Önskad signifikans.
Användaren kan simulera incidenter genom att stänga av ett körfält. Dynamisk justering av kapaciteten under simuleringen är dock inte möjlig.
Ännu finns inget bra användarsnitt för FLEXSYT, men ett grafiskt gränssnitt håller på att utvecklas under 1996 som gör det möjligt att bygga och ändra nät-verket på grafisk väg. Trafiken visualiseras genom att detektorer ändrar färg när fordon står stilla på dem eller passerar. Dessutom visas trafiksignalerna. Inga for-don visas dock på grund av att FLEXSYT är en händelsestyrd modell och inte en tidsstegsmodell.
6 INTEGRATION
INTEGRATION är en kanadensisk modell, utvecklad vid Queen's University, Kingston, Ontario. Modellen är utvecklad för att studera kontrollstrategier för landsvägar med anslutningsvägar (freeways/arterials) under periodiska eller till-fälliga trafikstockningar.
6.1 Simuleringsprocessen
Modellen är tidsstyrd, och beräknar de individuella fordonens färdförlopp med jämna tidsintervall (0,1 sekunder). Samtidigt sker även kontroll av eventuella regleringar, köer, vägval, kapacitet eller andra faktorer, och fordonsrörelserna uppdateras i enlighet härmed.
I och med att man vet varje fordons status i varje Ögonblick, kan detta också påverkas kontinuerligt. Exempelvis kan fordonens fördröjningar påverkas av dynamiska förändringar. Man kan alltså studera signaler reglerade i real tid, trafik-styrda rampkontroll-system, inverkan av incidenter med varierande varaktighet samt inverkan av dynamiska vägvisningssystem.
Trafikefterfrågan måste specificeras för en bestämd tidsperiod, från ett fåtal minuter till kanske en eller flera timmar, beroende på variationerna i trafikflödena. Denna efterfrågan representeras i en O-D matris. Fordonen genereras i ankomst-punkterna med antingen likforrnigt eller exponentiellt fördelade tidsavstånd.
På färden beräknas restiden på varje länk med den önskade hastigheten. När fordonet nått slutet på länken fortsätter det på nästa, om inte några villkor förhind-rar detta. Typiska restriktioner är ett rödljus, en kö som väntar på att avvecklas, en incident som blockerar hela vägen, eller en kö nedströms som även blockerar
korsningar uppströms.
'
När ett antal länkar är tillgängliga i en nod, väljs en lämplig länk med hänsyn till destinationen ur en uppsättning ruttvektorer. Dessa ruttvektorer är en matema-tisk representation av vad man anser vara den rekommenderade färdvägen från varje nod till varje möjlig destination. Vektorema kan vara förvalda, för att avbilda den allmänna kunskapen förarna har om de bästa färdvägama. Alternativt kan vektorerna beräknas on-line, baserade på de modellerade, dynamiska trafik-tillstånden.
6.2 Assignment
INTEGRATION-modellen omfattar även en assignment-del, som innehåller en del finesser. Vanligen är O-D data mycket omständliga och svåra att erhålla genom mätningar. I stället försöker man skapa syntetiska O-D matriser
bakvägen , genom att utgå från länkflödena som är mycket enklare att mäta.
Eftersom länkflödena påverkas av regleringar, trafikstockningar och incidenter, måste O-D matrisen förändras med flödena. Det blir då problem, om matriserna skall förnyas, säg var 15:e minut och on-line, eftersom det är fråga om iterativa beräkningar. I INTEGRATION utnyttjas Information Minimization - Entropy Maximization algoritmen för att skapa O-D matrisen. Finessen är sedan, att en ny O-D matris utgår från den föregående och modifieras med hänsyn till flödesför-ändringarna, vilket radikalt minskar iterationsprocessen.6.3 Indata - utdata
Indata omfattar fem filer:0 Nodkoordinater.
0 Länkkarakteristika: start- och slutnoder, frifordonshastighet, antal körfält, mättnadsflöde, typ av signalreglering samt mättnadsflöde vid trafikstock-ning.
0 Trafiksignaler: tidssättningar. 0 Trafikflöden: O-D efterfrågan. 0 Incidentbeskrivning.
Indata kodas som ASCII-tecken i tabellform, normala texteditorer kan använ-das.
Utdata omfattar bland annat restider, såväl per länk som för hela resan. Dess-utom kan man få en grafisk bild över vägnätet, med fordon, signaler och inciden-ter markerade i olika färger. Exekveringstiden förlängs så mycket vid den grafiska presentationen, att förloppet inte kan visas dynamiskt.
7 TRAF-NETSIM
NETSIM är en modell, som kontinuerligt utvecklats under cirka tjugo år, under FHWAs överinseende. Numera ingår NETSIM i ett större system, TRAF (se figur 7.1), omfattande såväl trafikalstring, assignment som trafiksimulering. NETSIM omfattar simulering av gatunät i tätort, medan FRESIM simulerar motorvägstrafik.
[TRAF |
_
l
i
_
i
l
i
+
|
|CORS|M|
|CORFLOI
FRESIM
NETFLO
FREFLO
l
l
NETFLO 1
NETFLO 2
Figur 7.] TRAF-systemet.
7.1 Simuleringsprocessen
TRAF-NETSIM är en mikroskopisk simuleringsmodell, där enskilda fordons beteende påverkas av trafikflöde, signalregleringar, svängar i korsningar, kors-ningsgeometri, busstrafik, parkeringsmanövrer samt fotgängarinteraktioner.
Modellen är tidsstyrd med tidsinkrementet l sekund. Varje variabel kontroll-apparat (som trafiksignaler) och varje händelse uppdateras varje sekund. Fordonen
beskrivs med kategori och typ. Fyra kategorier kan finnas: personbilar,
samåk-ningsfordon (carpool), lastbilar och bussar. Inom de fyra kategorierna kan man definiera upp till 16 olika typer med olika prestanda. Dessutom kan olika förar-beteende (passivt eller aggressivt) tilldelas varje fordon. Både fordonets
kinema-tiska egenskaper (hastighet och acceleration) och dess status (fordon i kö eller fritt
fordon) bestäms. Svängande rörelser bestäms slumpmässigt, vilket även gäller önskade hastigheter, tidsavstånd vid köavveckling och andra beteendeattribut.
Varje gång ett fordon förflyttas, beräknas dess laterala och longitudinella läge samt förhållandena till angränsande fordon, tillika med fordonets hastighet, acce-leration och status. Trafikstyrda signaler och interaktionen mellan bilar och bussar modelleras särskilt.
Fordonsrörelserna styrs av encar-following modell, dessutom av trafikstyr-ningsapparater och andra krav. Exempelvis så stannar bussar vid hållplatser; där-för skiljer sig deras rörelser från de privata fordonens.
Fordonens ankomsttidpunkter till systemet genereras med konstanta tidsinter-vall i proportion till flödet. Fordonen placeras i de körfält som är lämpliga med tanke på kommande svängningsmanövrer. Avstånden mellan fordonen blir aldrig mindre än en säker stoppsträcka.
Modellen omfattar körfältsbytes- och car-following-algoritmer. Om ett fordon kommer närmare ett hinder än fem fot, och en lämplig lucka inte finns i angrän-sande körfält, så stannar fordonet bakom hindret. Där blir det stående tills hindret avlägsnats eller acceptabel lucka blivit tillgänglig. Modellen förutsätter, att ett fordon som bytt körfält på detta sätt, önskar byta tillbaka vid lämpligt tillfälle.
Nedan följer en beskrivning av vissa specifika detaljer i TRAF-NETSIM: Geometrisk representation. Vägnätet modelleras som en uppsättning länkar och noder. En vägsektion med likformig geometri motsvarar en länk. Vägkors-ningar eller där väggeometrin förändras (dvs. ändringar i antal körfält, lutning, kapacitet, hastighet etc.) representeras av en nod.
Reglering med vägmärken eller signaler. TRAF-NETSIM kan modellera tra-fik i icke-signalreglerade korsningar, där sekundärvägarna kontrolleras med skyl-dighet att lämna företräde eller att stoppa. Däremot kan inte fyrvägsstopp simule-ras. TRAF-NETSIM kan simulera både trafik- och tidsstyrda signaler. Nyligen har man också infört intelligenta signaler, genom att implementera logiska trafik-detektorer, där förändringar i flöde och svängrörelser minut för minut via en tra-fikkontrollalgoritm kan påverka signaltiderna.
Hinder. Fördröjningar och köer förorsakade av incidenter, körfältsavstäng-ningar eller andra restriktioner kan modelleras.
Kollektivtrafikfált. Reserverade körfält för bussar och samåkare kan modelle-ras.
7.2 Assignment
TRAF-NETSIM innehåller en assignmentmodell, som är deterministisk och
sta-tisk. Modellen ger andelarna svängande trafik i korsningarna, baserat på de beräk-nade rutterna. Modellen kan beräkna rutterna antingen efter användaroptimala eller systemoptimala kriterier. Den senaste versionen innehåller en förbättrad beräkning av restider och kapaciteter, i och med att hänsyn tas till fördröjningar i korsningar, olika straff för svängar samt till typer av korsningsreglering.
7.3 Indata - utdata
TRAF-NETSIM kräver mycket detaljerade indata för att modellen skall fungera
korrekt. Obligatoriska data omfattar vägnätets geometri,korsningsregleringar,
trafikflöden samt andelar svängande trafik. Valfria data definierar busstrafik, par-keringsaktiviteter, planskilda korsningar och mycket annat.
Indata till modellen utgörs av ett antal datatyper, ursprungligen i hålkortsfor-mat. Typ OO - 05 rör definition och kontroll av körningen, typ 10 - 210 specifice-rar vägnät, trafikflöden, regleringar, incidenter etc.
Utdata omfattar olika effektivitetsmått, som medelhastighet, antal stopp, för-dröjningar, antal fordonstimmar och fordonskilometer, bränsleförbrukning och
emissioner. Dessutom kan man få grafiska utdata, både animerade och statiska bilder.
Det finns stödprogram för in- och utmatning:
TSIS är en uppsättning utility-program, som ger en menystyrd tillgång till hela TRAF-familjens verktyg.
TRAFEdit 'ar en interaktiv dataeditor, där man kan skapa och modifiera data för TRAF-systemet.
GTRAF är en interaktiv postprocessor, som stöder statiska och animerade bil-der från TRAF-NETSIM.
8 AlMSUNZ
AIMSUN2 är en spansk (katalansk) simuleringsmodell, utvecklad vid Universität Politecnica de Catalunya, Barcelona. Modellen ingår i en generell systemmiljö, GETRAM (se nedan), som gör det möjligt att utnyttja olika modeller för assign-ment och simulering men med en gemensam databas.
8.1 Användargränssnittet GETRAM
GETRAM - Generic Environment for Traffic Analysis and Modelling - är en systemmiljö, som stöder användning av olika typer av modeller och analysverktyg. Man kan alltså utnyttja modeller som sträcker sig från assignment till makro-, meso- och mikroskopiska simuleringsmodeller med samma uppsättning indata. Vanligen är ju in- och utdata modellberoende, vilket medför att det oftast är allt för arbetsamt att specificera indata och verifiera för fler än två modeller. Exem-pelvis är det avsevärda skillnader i trafik- och vägnätsbeskrivning mellan en assignmentmodell och en mikrosimuleringsmodell. Detta kräver då omfattande arbete, för att man skall kunna utnyttja assignmentresultaten i simuleringen.
GETRAM löser dessa problem, genom att samma indata kan utnyttjas av olika modeller, dessutom kan resultatet från en modellstudie utgöra indata till en annan. Indata skapas i en modelloberoende editor, till skillnad från de flesta andra pro-gramsystem.
Uppbyggnaden av GETRAM framgår av figur 8.1 Som framgått ovan, är avsikten med GETRAM att skapa ett användargränssnitt, inom vilket olika typer av trafikmodeller och analysverktyg integreras, genom att gemensamma verktyg som databas, grafisk editor och resultatpresentation kan utnyttjas.
Control plans RCSUILS
storage storztge
O_
Q_
3
3
GE'I'IMM Application Programming Interface
ll
Ål
etwork UOGZW cm malm, 22:5 statistics view manag. Common Common Editor Results Presentation network network network states/ view v state ' statistics/ . N simulation modelsN
ass'gnmem ma conversion to/from
EANEQ format + * AIMSU'N Data 1 MM Assignment L J models \ /
Figur 8.] GETRAMS uppbyggnad.
Databasen kan antingen vara ett relationssystem (INGRES) eller vanliga ASCII-filer. Automatisk omkodning av ett vägnät från ett format till ett annat är möjlig. Detaljanalys av delar av ett större vägnät utnyttjar samma databas, i stället för att skapa en ny. En modell kan starta med resultat från en tidigare modell för hela eller delar av vägnätet.
Systemet stöder vägnät både i tätort och på landsbygd. Länkarnas geometri definieras på mikroskopisk nivå, men editorn gör arbetet lika snabbt som om man specificerade endimensionella länkar; noderna kan skapas automatiskt. Trots detta är indatahanteringen en av de svåraste uppgifterna. För att ytterligare underlätta arbetet, har man därför utvecklat editorn, så att den accepterar en grafisk bakgrund
över vägnätsområdet (t.ex. en digital karta). Länkar och noder kan då byggas upp i förgrunden inom denna referensram.
GETRAMS arbetsmetodik utgår från att olika detaljeringsnivåer är nödvändiga, beroende på vägnätets storlek och den erforderliga analysen. Exempelvis är för ett regionalt område, en assignmentmodell som EMME/2 oftast den bästa lösningen. När området krymper, ökar detaljeringsbehovet vilket får modellerna att gå från makroskopiska över mesoskopiska till mikroskopiska. Systemet har konstruerats för att följande metodik skall kunna tillämpas:
1. Specificera vägnätets geometri, trafikparametrar och trafikefterfrågan (O-D matrisen). I stället för tvingas digitalisera nätverket, har man här möjlighet att utnyttja ett grafiskt datautväxlingsformat, DXF, som tjänar som bakgrund till nätverksediteringen. DXF-format kan man få från GIS-system.
2. Specificera en plan för reglering av korsningar och ramper.
3. Använd en assignmentmodell med en O-D matris och en regleringsplan för vägnätet för att erhålla ett tillstånd eller en tillståndssekvens: svängningsan-delar, ankomstflöden och approximativa trafikbetingelser i sektionerna. Denna uppgift utförs av EMME/Z-systemet eller någon kompatibel modell. 4. Tillämpa en makroskopisk simuleringsmodell på ett delvägnät genom att
utnyttja assignmentresultaten. Analysera inverkan av incidenter.
5. När större noggrannhet erfordras, tillämpa en mesoskopisk eller mikrosko-pisk simuleringsmodell, där tidigare simuleringsresultat utnyttjas.
6. Andra regleringsplanen eller nätverkskarakteristika och gå tillbaka till punkt 4 eller 5.
7. Gå tillbaka till punkt 3 om ändringarna avsevärt påverkar assignmentresul-tatet.
Emellertid är inte systemet bundet till denna metodik. Simulatorema kan utnyttjas oberoende av assignmentresultaten; man kan använda assignmentmo-dellen enbart; den makroskopiska simuleringen kan ersättas med en mikroskopisk. Alla programmoduler i GETRAM har tillgång till databasen. kontrollprogram-filerna och resultatfilema via ett bibliotek i applikationsprogramgränssnittet (API)
benämnt TDFunctions. Detta bibliotek stöder också trafiknätverkseditorn TEDI,
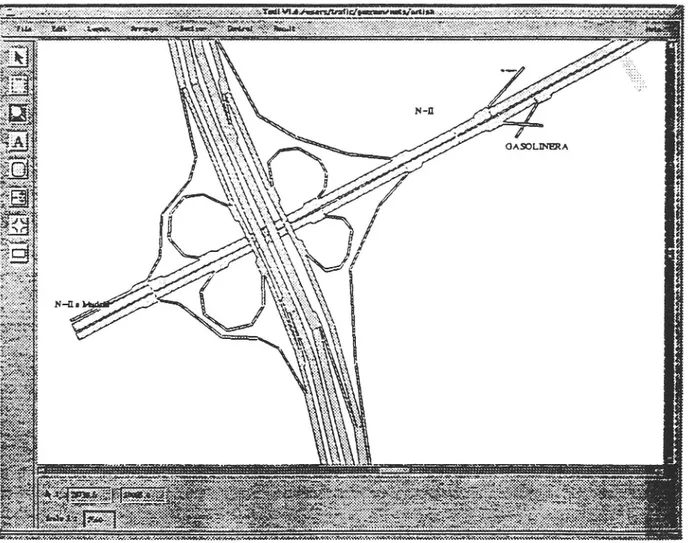
som är ett användarvänligt meny- och musorienterat gränssnitt. TEDI ger en rea-listisk bild av vägnätet, se figur 8.2. Realismen är här större än för de editorer, som ger en endimensionell bild av vägnätet. TEDI kan också ladda en grafisk DXF-fil för bakgrunden. vilket gör att man slipper digitalisera kartor. I TEDI är vidare alla editeringsmöjligheter - sektionsgeometri, svängningsrörelser, signal-sättningar osv. - tillgängliga i samma fönster. Nätverkstillstånd och regleringspla-ner är också specificerade i huvudfönstret.
42-1317030; :54:- . .''q 'I 'gu-0.945" ,M
.14.
. vu ..3.'
_ ._ ,l . .øøsuu- 4 i av... ._ ,U ., . , . ....,.A .-.v....w ,. -. .vsbsssx\\WM5\\\\Q\\\\§\\\§\\i\\\\\\äx\\§\\\§§\\\\ä>\\\i\\s§\\\N\\\\'.6\\\\s§ \s\\\ wasxz\\xssass\\uss .«\n\-.\\\\s\\'r\s.\ s\..\\\s.\\\ns \ \
§ny-»w ( ü. . . . .. .. ;4 _
1 .
W-Figur 8.2 Exempel på vägmodell iAIMSUNZ.
8.2 Simuleringsmodellen AIMSUN2
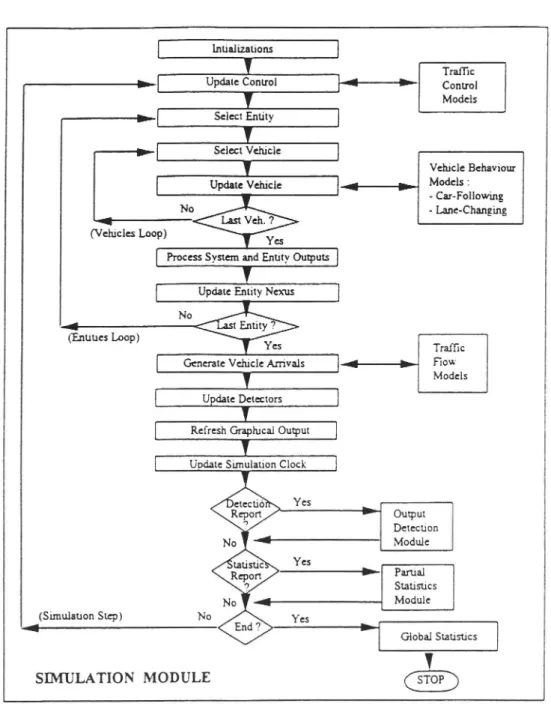
Figur 8.3 visar systemuppbyggnaden för AIMSUN2, och hur modellen är knuten till GETRAM. Som synes har AIMSUN2 ett eget användargränssnitt, detta är en delm'angd av GETRAMs grafiska editor. Försimuleringsmodulen läser in aktuellt scenariø från nätverksdatabasen och bygger upp datastrukturerna för körningen. Simuleringsmodulen utför trafiksimuleringen i det valda scenariot. Figur 8.4 visar simuleringsprøgrammets uppbyggnad.
RESULTS Presentation
Data Base Module
| Network NETWORK Emm' Data Base
_ - _ - - - - i - dr |
V 7
AIMSUNZ
DATA BASE ACCESS MODULE
PRESIMULATOR MODEL \ SIMULATOR
l l
USER INTERFACE
Figur 8.3 AIMSUN2-systemet.
[i lntializations ]
j Traffic
.| Update Control H Control
' Models r---4 .{ Select Entity J r Select Vehiele ] Vehicle Behaviour r Update Vehicle JH M°d°15 3 . Car-Follong No - Lane-Changing
(Vehicles Loop) Yes
rProcess SyStem and Entity Outputs J
l Update Entity Nexus J
No
4 t Entity '.7
Lities Loo )
(En p Yes Traffic
r Generate Vehicle Arrivals lH Flow
Models
[ Update Detectors ] r Refresli Graphical Output ]
r Update Simulation Clock J
Output Detection Module ?antal Statistics Module (Simulation Step) 4 Global Statistics
V
SIMULATION MODULE
Figur 8.4 Flödesschema Över simuleringsprogrammet.
8.2.1 Vägnätsmodellen
Ett vägnät i AIMSUN2 består av en uppsättning enkelriktade länkar, som är anknutna till varandra i noder. Den grundläggande modellstrukturen är elementet: sektioner består av sektionselement som motsvarar körfält, och noder utgörs av nodelement, som är områden där ingående körfält ansluts till utgående och där svängningsrörelser utförs. Fordonen rör sig genom nätverket genom' elementen enligt fordonsbeteendemodeller, vilka är en funktion av den miljö, som definieras av den aktuella och de angränsande elementen.
De trafikbetingelser som skall simuleras, definieras av flödena i ankomstno-dema (yttre noder), och andelar svängande trafik i de inre noderna. Dessa data
kan, som nämnts, vara resultatet från en tidigare assignment-modell, från data
insamlade via detektorer eller som en experimentell hypotes.
En nod förenar två eller flera sektioner. I noderna fördelas trafiken från en sek-tion till andra seksek-tioner. Det finns två typer av noder: korsningar och anslutningar, dvs. påfarter och avfarter.
I korsningar bestämmer ingångs- och utgångssektionema den yta, som fordo-nen befar från en sektion till en annan, detta är den egentliga korsningen. Den modelleras med korsningselement, vilka representerar alla möjliga anslutningar mellan in- och utgående körfält. I figur 8.5 åskådliggörs korsningselement som ytor ett fordon har att köra på genom korsningen. Dessa element ger möjlighet att modellera konfliktzoner.
1
T secnom
|
l
§
SECTION 5
I L
Entity-Iane 1.1
/
SECTION 3/ l ' Enmy_|ane1 2 secnom EM' O\ O "' 33_ EA? Node _ ' Node
\ 1
| i
,1 Entrty-lane 2.1
--
,
EA3_____ ec. ec2 EM secnom Enm men
0
°°
'
_L_:
SECTION 2 SECTlON 6 ; | SECTION 3 Enllty-lane 3.1 _\ _ EA i; Enmy Section | / \ ?I ec j: Emily junclion I O Conflict Zone SECTION 1 0 0 -0 0 . 0 0 . . . 0 0 0 . 0 0Figur 8.5 Noa' och nodelement samt sektion och sektionselement.
I anslutningar förenas ingående och utgående sektioner direkt, se figur 8.6. Dessa noder förekommer mest i planskilda korsningar.
lundure / juncture /
/
- - -r-- -_ -_ / _. --b- " -_ -_ 'k \ __ _ A B luncwre juncture '5. x _ ____ _.-...pv' - -.r CFigur 8.6 Olika typer av förgreningar.
Sektioner är en uppsättning angränsande körfält med samma körriktning, som förenar två noder. En sektion består av sektionselement, som var och en motsvarar
ett körfält, se figur 8.5. Körfält kan reserveras för viss trafik.
-Olika typer av detektorer kan modelleras i AIMSUN2 för: räkning, hastighet, närvaro, belastningsgrad och kölängd. En sektion kan ha flera detektorer, men en detektor kan endast höra till en sektion.
Variabla informationsskyltar (VMS) kan simuleras, med information om t.ex. ändrade hastighetsbegränsningar, rekommendation om alternativa rutter, köer och incidenter.
8.2.2 Trafikmodellen
Fordonens ankomster genereras slumpmässigt till de yttre noderna. Sedan färdas fordonen genom vägnätet och svänger i korsningarna slumpmässigt i proportion till de givna svängningsandelarna. Förama har alltså inte kunskap om hela färd-vägen. Under färden försöker förarna hålla den önskade hastigheten i varje
sek-tion, men fordonsrörelserna styrs också med beteendemodeller för car-following
och körfältsbyten samt av regleringar och konflikter i korsningar, incidenter osv. Simuleringsprocessen är tidsstyrd, med ett inkrement, som sätts lika med förar-nas reaktionstid, mellan 0,5 och 1,25 sekunder.
Ankomstintervallen genereras negativt exponentialfördelade, skiftat negativt exponentialfördelade eller kolonnfördelade (det framgår inte om tidsavstånden i
kolonner är konstanta eller normalfördelade). *
Körfältsbytesmodellen och car-following modellen är tillämpningar av Gipps' modeller från 1986 respektive 1981.


![Figur 7.] TRAF-systemet.](https://thumb-eu.123doks.com/thumbv2/5dokorg/4939207.135946/27.892.143.769.274.638/figur-traf-systemet.webp)
![Figur 8.] GETRAMS uppbyggnad.](https://thumb-eu.123doks.com/thumbv2/5dokorg/4939207.135946/31.892.203.708.117.827/figur-getrams-uppbyggnad.webp)