VTInotat
Nummer: TF 50-01 ' Datum: 1986-12-19
Titel: PROVBANETEST AV DUBBELKOMBINATIONER PÅ VINTERVÄGLAG
:Författare: Olle Nordström och Peter Ståhl
Avdelning: TF
'Projektnummen 50305-2
Projektnamn: Provning av dubbelkombination (dragbil med två
påhängsvagnar)
'
Uppdragsgivare: TFK, STU
Distribution: fri / piftöHiH / Eégfâiááád /
Vag-ach Paf/Ir-
_,
.
_
Statens väg- och trafikinstitut
Pa: 58707 Linköping. Tel. 073- 1752 00. Te/ex 50125 VT/SG/ s
IIIStItlltet
Besök: Olaus Magnus väg 37, Linköping
INNEHÅLLSFÖRTECKNING 3.1.1 3.1.2 3.1.3 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 4.1 4.1.1 4.1.2 4.1.3 4.2 4.3 4.3.1 4.3.2 4.4 4.4.1 4.4.2 BAKGRUND SYFTE PROVNINGSPROGRAM Provtyper VTI:s väjningsmanöverprov
Bromsning vid ingång i kurva med 100 m radie Bromsning på underlag med split friction
Provfordon Bromsutrustning Vikningsskydd Lasttillstånd Däckutrustning Mät- och registreringsutrustning Provningssystematik Utvärdering av försöksresultat Sammanvägning av försöksresultat Resultatens förarberoende RESULTAT Referenskombinationen (LS, LKV) VTI:s väjningsmanöverprov
Bromsning vid ingång i kurva med 100 m radie Bromsning på split friction
Referenskombinationen kompletterad med ALS enbart på lastbilen
Referenskombinationen kompletterad med ALS
på alla axlar (LS, LKV + ALS)
Bromsning vid ingång i kurva med 100 m radie
Bromsning på splittriction
Jämförelse mellan referenskombination och
dubbel-kombinationer i grundutförande (Fri dolly och
lastkännande ventiler på alla axlar)Dubbelkombination DLL Dubbelkombination DLK 10 10 10 11 11 12 13 13 13 14 14 15 15 15 16 23 23 23
4.5.1 4.5.2 4.5.3 4.6 4.6.1 4.6.2 4.7 4.7.1 4.7.2 4.8 4.9 4.10
?
s
e
i - ---0 -N -5.1 5.2 5.3 5.4 5.5 5.6Inverkan av stel dolly för dubbelkombinationer 23 ' med lastkännande ventiler
Dubbelkombination DLL
' 23
Dubbelkombination DLK 24
Generaliserat resultat 24
Inverkan av komplettering med ALS på dragbilen 25
för de provade dubbelkombinationerna
Dubbelkombination DLL 25
Dubbelkombination DLK 25
Inverkan av komplettering med ALS på samtliga axlar 26
för de provade dubbelkombinationerna
Dubbelkombination DLL 26
Dubbelkombination DLK 26
Dragbil med påhängsvagn (SLL) i jämförelse mellan
27
referenskombinationen respektive dubbelkombinationen DLL
Jämförelse mellan dragbil med 12 m lång pâhängsvagn (SLK) 27 och referenskombinationen lastbil med 12 m lång släpvagn
Inverkan av lasttillstândet på bromsningsegenskaperna 28
vid bromsning i kurva
Kompletterande värderingskriterier 30
Maximal rattvinkel . 30
Kontrollerbarhetsbedömning 31
RESULTATSAMMANFATTNING MED DISKUSSION 36
Referenskombinationens prestationsniv'â 36
Dubbelkombinationerna i grundutförande, dvs med 36
fri dolly och LKV
Inverkan av komplettering med stel dolly 36
Inverkan av komplettering med ALS enbart på dragbilen 37 Inverkan av komplettering med ALS på samtliga axlar 37
Dragbil med pâhängsvagn jämförd med referens- 38
3.1
PROVBANETEST AV DUBBELKOMBINATIONER PÅ VINTERVÄGLAG av Olle Nordström och Peter Ståhl
BAKGRUND
Stora transportekonomiska vinster förväntas om nuvarande transport-system med lastbil och släpvagn ersätts av transporttransport-system med "dubbel-kombinationer" dvs dragbil med påhängsvagn plus släpvagn där släpvag-nen är en styraxelförsedd påhängsvagn. Kombinatiosläpvag-nen kan för
närvaran-de inte utnyttjas rationellt, då närvaran-den är hastighetsbegränsad till 40 km/h.
Orsaken till att gränsen inte höjts är att dess körsäkerhet ifrågasatts av bl a VTI. En utredning med syfte att ta fram dubbelkombinationer med goda fordonsdynamiska egenskaper som kan godkännas för 70 km/h
bedrivs därför av TFK. Det här beskrivna projektet är ett delprojekt
inom ramen för denna utredning.
SYFTE
Syftet med provbanetestet är att experimentellt utvärdera körsäkerhe-ten hos olika varianter av två inom huvudprojektet framtagna prototyper
till optimala dubbelkombinationer. Värderingen skall ske i förhållande till en referenskombination bestående av lastbil med släpvagn. Dessutom skall motsvarande'värdering göras för en kombination bestående av dragbil med påhängsvagn. .
PROVNINGSPROGRAM
Provtyper
Provningen har utförts på extremt vinterväglag för att ge svåra prov-ningsbetingelser samtidigt som risknivån kunnat hållas på acceptabel
3.1.1
3.1.2
Programmet har omfattat tre olika manöverprov för utvärdering av fordonskombinationernas körsäkerhet i form av stabilitet, styrförmâga och bromsförmâga. Manöverproven var följande:
1) VTI:s väjningsmanöverprov utförd på dubbriven is.
2) Bromsning vid ingång i kurva med 100 m radie utförd på dubbriven is. 3) Bromsning på rak kurs på underlag med s k split friction, dvs med
olika friktion för .höger och vänster sidas hjul. Högfriktionsunderlaget var fastfrusen sand och lågfriktionsunderlaget slät is.
VTI:s väjningsmanöverprov ( se figur 3.l)
Provbanan utgörs av en 40 m lång ingångkorridor följd av 40 m fri sträcka fram till en 10 m lång och 3,5 m sidoförskjuten mittkorridor som efter ytterligare 40 m följs av en 40 m lång utgångskorridor. Samtliga
korridorer är 3,5 m breda och vid var 10 m markerade med koner. Banan
genomkörs med i princip konstant hastighet som stegvis ökas tills banbegränsningarna inte längre kan innehållas. Ingångshastighet, medel-hastighet och utgångsmedel-hastighet beräknas för varje prov och vikningsvink-lar över 200 registreras. Vidare noteras antal träffade koner, uppskattad maximal r'attvinkel och kontrollerbarhetspoäng. Banan dubbrivs mellan varje prov med en speciell dubbrivningsvält.
Bromsning vid ingång i kurva med 100 m radie (se figur 3.2)
Banan utgörs av en 50 m lång rak ingångskorridor med 3 meters bredd som följs av en symmetriskt belägen 4 m bred korridor med 100 m radie. Bromsningen påbörjas teoretiskt när framaxeln når kurvradiens början. Förarens uppgift är att stanna på kortast möjliga sträcka utan att överskrida korridorgränserna. Verklig bromsansättningspunkt registreras av mikrodatorn liksom ingångshastighet och bromssträcka ur vilka data medelretardationen beräknas. Ingångshastigheten anpassas efter
medel-retardationen med antilåssystem för kombination lastbil med släp (LS)
enligt formeln V0 =.- lov-'á' m/s.
r
-315m
- vi ' 4"..
4:/ r \\N§\-§-o-o_o-ok_ 35mv"
---307m
Om
40m
10m
40m
OmifDmfiom än
t 1 .. .4 3_ "-9 är' i: a.) :5; - A.. -i_ .as- g 4... _ i) ' 51 a" t 9' '" ;3 .- i .f .f ..-" : .i ,I :i 3 .f 1-? i .r -' .i f .! f.-r' ,1 .r' ;4 _.-" ä" 2' .i 1;' 2' .I f' .6 .f .i a' ..- ,i .i i ?g :1:: .i _.--' ' ' QL'*'
-_ : r :_r !. i :_J, J, _l-;5,- :_.i. E.- A__.:I: ,, t r: i, .- :.-.- r_- .- _- ' ,-. r __: .>__.v:_-f.. _« .- ,. _ [3 I: ;-r; __ i.:4, :7.- I_V_.-i:__.- i.- : :.-' /:I
.-' .fix-'3,1': --_;:.f'/.-'-'/ l'; A: ;-,-.-' _-'5 l i: i; . ' ;4:_:_.-_.v/ :/.;..--' .r
-- asp-- :näsan-.san J r
L .-1 ' .nu .af / g - a r r; .. , ,I i i 7, .VV-4' j ,. i, i V!! 53 "55'/ .x l ?2. ___,;a
100 90 80 70 60 50 40 30 20 10 ng m
3.1.3 .
3.2
Vikningsvinklar över 20° registreras med avseende på tid och sträcka efter bromsning. Antal banöverskridanden resp konträffar, subjektiv maximal rattvinkel och kontrollerbarhetspoäng noteras. Banan dubbrevs mellan varje bromsprov med en speciell dubbrivningsvält.
Bromsning på underlag med split friction (se figur 3.3)
Banan utgörs av en 3,5 m bred rak korridor begränsad av koner var 10 m. Till vänster om banans mittlinje i körriktningen räknat består banan av fastfrusen sand och till höger av slät is. Bromsproven utförs från en
hastighet av 50 km/h varvid förarens uppgift är att stanna på kortast
möjliga sträcka utan att överskrida korridorgränserna. Kurskorrektion med rattrörelser är tillåtna. Uppmätta storheter är utgångshastighet och bromssträcka samt tid och sträcka efter bromsansättning när viknings-vinkel över 20° inträffat. Antal konträffar resp banöverskridanden
noteras liksom även subjektivt bedömd maximal rattvinkel och
kontrol-lerbarhet.
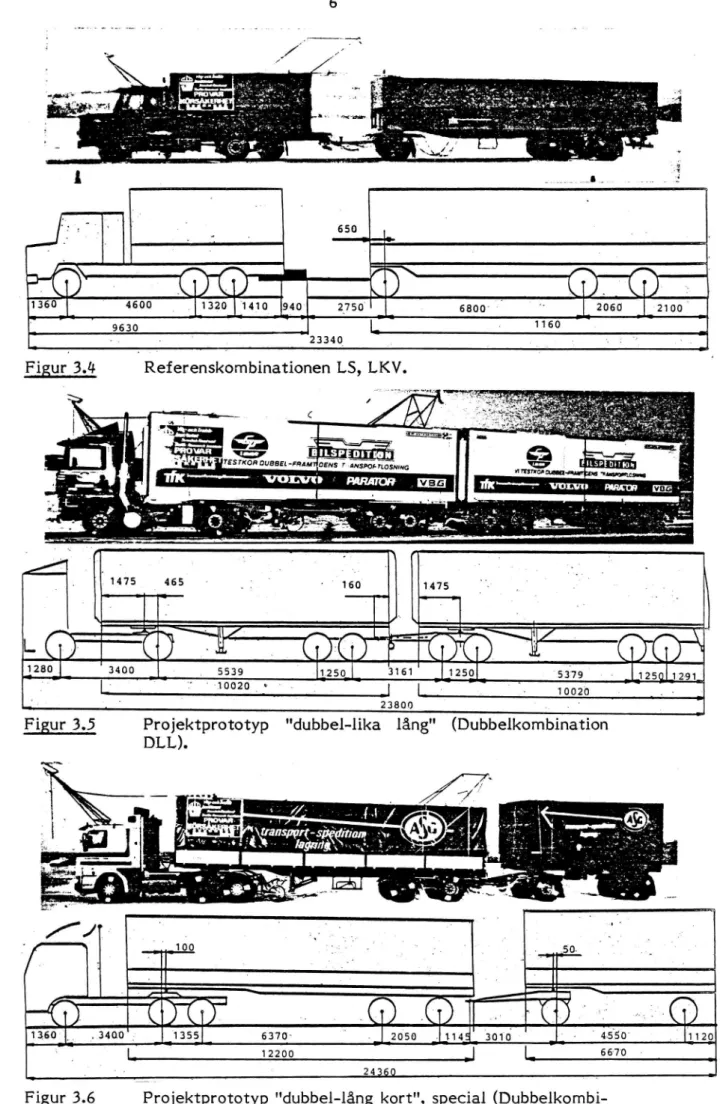
Provfordon (se figur 3.4, 3.5 och 3.6)
Provfordonen utgjordes av tre grundkombinationer, var och en ca 24 m lång och med en tillåten bruttovikt på 51,4 ton och utrustade med lastkännande ventiler (LKV) på samtliga axlar.
- Treaxlig lastbil med treaxlig släpvagn (Referenskombinationen LS).
- Projektprototypen "dubbel-lika lång" dvs tvåaxlig dragbil och_ två
10 m långa påhängsvagnar varav den sista med dolly (DLL).
- Projektprototypen "dubbel-lång kort, special" dvs treaxlig dragbil, en
12 m lång pâhängsvagn och en 6,5 m kort påhängsvagn med dolly (DLK).
Därutöver utgjorde dubbelkombinationernas två första fordonsenheter tvâ ytterligare provkombinationer SLL och SLK av typ dragbil och påhängsvagn.
1320 1410' 40> 2750' 1 - "' 2060 '2100"
23340 Figur 3.4 Referenskombinationen LS, LKV. 1230 3400 _ i 5539 ^ . 161 1250 '5379 '- ' ' i* '210020 " i 1 0 ' ' ' 23800 '
Figur 3.5 Projektprototyp "dubbel-lika lång" (Dubbelkombination
_ ' _;7 .H //*'- .u;.Åqu/.(,T$ä>,ui
itä-mäta 7 fra Ir. - x \ ' ' _ h ' i
i . \v_ \\ _'_..., :'-k J
_.3400 g 1-: 6370* 2050 12200 13.60' *1355
'4560' 6670 .1 V*
Figur 3.6 Projektprototyp "dubbel-lång kort", special
3.3
3.4
Bromsutrustning
Referenskombinationen (LS, LKV) provades utöver referensutförandet med lastkännande ventiler även kompletterad med antilåssystem på alla axlar (LS, LKV + ALS).
Dubbelkombinationerna DLL och DLK provades med följande bromsut-rustning:
- lastkännande ventiler (LKV) på samtliga fordonsenheter
- lastkännande ventiler (LKV) plus antilâssystem (ALS) på
dragbilen och endast lastkännande ventiler (LKV) på
på-hängsvagnarna- lastkännande ventiler (LKV) plus antilåssystem (ALS) på
samtliga fordonsenheter. DLL:s pâhängsvagnar dock med medreglerad , främre boggiaxel och DLK:s dragbil med medreglerad stödaxel.
Kombinationen SLL provades med:
- lastkännande ventiler (LKV) på samtliga fordonsenheter
- lastkännande ventiler (LKV) plus antilâssystem (ALS) på
dragbilen och endast lastkännande ventiler på påhängsvagnen
- lastkännande ventiler (LKV) plus antilåssystem (ALS) på hela
fordonskombinationen.
Kombinationen SLK provades enbart i väjningsmanövern där bromsning inte ingår.
Antilâssystemen var genomgående av fabrikat WABCO av senaste ännu inte marknadsförda utförande så när som på DLK:s långa påhängsvagn
som hade senaste standardutförande.
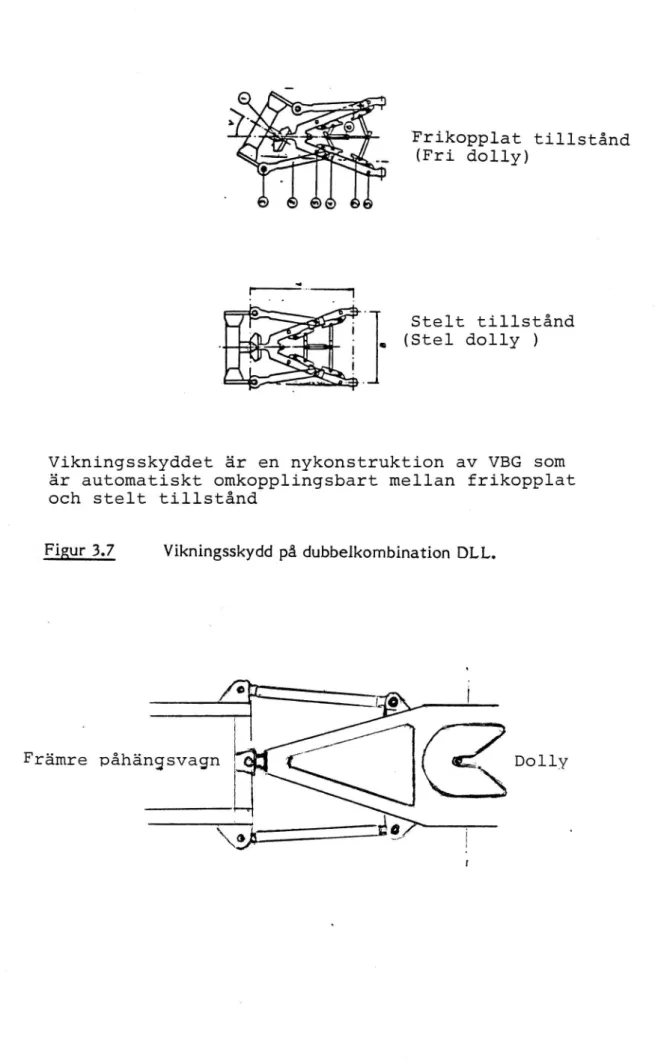
Vikningsskydd (se figur 3.7 och 3.8).
Dubbelkombinationerna DLL och DLK provades med och utan
viknings-skydd av typ stel dolly, dvs med dollyns sidorörelse relativt
framförva-rande pâhängsvagn eliminerad med hjälp av två extra dragstänger. Vid
samtliga ledpunkter fanns dessutom vikningsskydd i form av nylonrep
Frikopplat tillstånd (Fri dolly)
Stelt tillstånd
. (Stel dolly )
Vikningsskyddet är en nykonstruktion av VBG som är autematiskt omkopplingsbart mellan frikopplat
och stelt tillstånd
Figur 3.7 Vikningsskydd på dubbelkombination DLL.
Främre påhängsvagn
3.5 Lasttillstånd
Lastens tyngdpunktshöjd över flak var cirka 30 cm.
Lasttillståndet varierade vid de olika proven enligt följande: VTI:s väjningsmanöver
Samtliga provade kombinationer:
- Enbart med tillåten bruttovikt (Lastfall 4)
Bromsning vid ingång i kurva med 100 m radie LS och dubbelkombination DLL:- Tjänstevikt (Lastfall l)
- Last endast på främre lastbärare (Lastfall 2)
- Last endast på bakre lastbärare (Lastfall 3)
- Tillåten bruttovikt (Lastfall 4)
De tre första lastfallen provades av kostnadsskäl enbart med stel
dolly för DLL, som bedömdes vara den intressantaste varianten.
Dubbelkombination DLK:
- Enbart med tillåten bruttovikt (Lastfall 4)
Kombination SLL:
- Enbart med tillåten bruttovikt (Lastfall 4)
Bromsning på Split friction Samtliga provade kombinationer:
- Enbart vid tjänstevikt (Lastfall 1) för att säkert kunna läsa alla hjul på högfriktionsunderlaget.
3.6
3.7
3.8
10
Däckutrustning
Samtliga fordon var utrustade med odubbade sommardäck av samma typ och fabrikat på likvärdiga axlar. Däcken var av typ stålradial med s k
rullmönster på frirullande hjul och s k drivmönster på drivande hjul.
Däcken hade fullt mönsterdjup. Ringtrycket 7 bar (700 kPa).
Däck-fabrikatet var MICHELIN typ X respektive XZT.
Mät- och registreringsutrustning Fordonen'var utrustade med:
- mäthjul för hastighet och vägsträcka
- mikrobrytare för indikering av vikningsvinklar större än 200
- 2 videokameror och vinkelskalor för registrering av vikningsvinklar,
sidoläge m m
- blinkfyrar som aktiveras vid vikningsvinklar över 20°
- mikrodator för dataregistrering och databehandling
- antenn för avkänning av position för bromsansättning resp för väj-ningsbanans början. För detta ändamål hade strömförande kabel-slingor frusits in i isbanan.
Därutöver registrerades proven med två fasta videokameror placerade i 10 m höga ställningar. Bandspelarna för dessa var inrymda i en husvagn som även utgjorde försöksledningscentral med radiokommunikation till
provfordonen.
Provningssystematik
Varje manövertyp kördes normalt sex gånger med respektive fordonsut-förande med cyklisk permutation mellan kombinationerna. Var tredje
körning utfördes därvid referenskombinationen i de fall alla tre
kombina-tionerna deltog. Vid bromsningsproven kördes referenskombinationen
varannan gång med LKV och varannan gång med LKV + ALS på båda
enheterna. De sistnämnda proven utnyttjades även som
3.9
3.10
11
Utvärdering av försöksresultat
'För de båda manöverproven med bromsning användes bästa medelretarn dationsvärde inom varje serie prov med en parameterkombination som jämförelsevärde. Normerad bromsförmåga erhölls genom division med referenskombinationens resultat vid samma provserie och multiplikation med 100. För att väga in svårighetsgraden i fråga om styrbarhet och stabilitet beräknades medelantalet konträffar per försök (K) inom varje serie och den normerade bromsförmågan dividerades med en faktor F = l+O,l-K. Resultatet benämns prestationstal.
Vid väjningsmanövern användes kvadraten på gränshas-tigheten som pri-märt jämförelsevärde eftersom detta är proportionellt mot teoretiskt
utnyttjad sidacceleration. Prestationstal erhölls på motsvarande sätt som
vid bromsproven.
Sammanvägning av försöksresultat
För att man skall kunna göra en sammanfattande värdering av resultaten i de olika delproven måste de erhållna prestationstalen viktas.
För dubbelkombinationen DLL har de olika belastningsfallen, vid broms-prov i kurva viktats efter uppskattat relativt trafikarbete enligt följande:
Lastfall Viktfaktor Prestationstal'
l Tjänstevikt 0,3 A
2 Last framtill 0,15 B
3 Last baktill 0,05 C
4 Tillåten bruttovikt 0,5 D
Sammanvägt prestationtal för delprov med dubbelkombination DLL: E = 0,3A + 0,155 + 0,05C +0,5D.
3.11
12
Detta prestationstal har använts i figur 4.5.
För sammanvägning av resultaten för de olika manövertyperna till ett sammanvägt totalt prestationstal har viktning gjorts efter uppskattad frekvens av manövertypen eller liknande manöver i verklig trafik enligt
följande:
Manövertyp Viktfaktor Prestationstal
VTI väjning 0,4 F
Bromsning i kurva 0,4 G
Bromsning split friction 0,2 H
Sammanvägt totalt prestationstal P = 0,4F + 0,4G + 0,2H.
Resultatens förarberoende
Jämförelsen mellan fordonskombinationerna har gjorts med respektive
provförare som integrerad del av kombinationen. En skiftning av förarna mellan kombinationerna var av tids- och kostnadsskäl otänkbar utan en kraftig reduktion av övriga försöksparametrar. En mindre provserie för bedömning av förarnas likvärdighet utfördes på två kombinationsvarian-ter varvid bromsning i kurva utfördes. Resultaten stöder antagandet att förarna kan betraktas som likvärdiga.
4. 4. l l. 1 13 RESULTAT
Sammanlagt utfördes 520 registrerade försök.
I figur 4.1, 4.2 och 4.3 och 4.4 redovisas basresultaten bromsförmåga i form av medelretardation respektive prestation relativt ref.komb.,
medelvärden av konträffar, bedömd max rattvinkel samt
kontrollerbar-hetsbedömning. Vidare anges kritiska axlar, kritiska ledpunkter och provningshastigheter. Dessa data utgör underlag för den fortsatta
resul-tatanalysen.
I figur 4.5, 4.6 och 4.7 redovisas prestationstal relaterade till
referens-kombinationer för dubbelreferens-kombinationerna DLL och DLK samt för
kombi-nationen SLL. Dessa prestationstal möjliggör rangordning med hänsyn till
resultat för en enskild manövertyp.
I figur 4.8 redovisas sammanvägda prestationstal som möjliggör en direkt rangordning med hänsyn till det totala resultatet.
Referenskombinationen (LS, LKV) VTI:s väjningsmanöverprov
Vid tillåten bruttovikt uppnåddes en högsta medelhastighet genom banan på 60km/h. Begränsande faktor var släpvagnens stabilitet. Sladd på framaxel eller bakaxlar initierades åt vänster vid återgången från mittkorridoren för att förstärkas åt höger i samband med ingång i utgångskorridoren. Vid färd på riktig väg skulle släpvagnen således i första hand hamna i höger vägdike. Mycket kraftiga retursladdar erhölls vid ett eller ett par tillfällen även efter det utgångskorridoren passe-rats. Föraren lyckades i samtliga fall hålla dragfordonet under kontroll tills pendlingarna dämpats ut trots att bakvagnen på detta också sladdade ut genom påverkan från säkerhetslinorna.
Vid proven med olastad lastbil och lastad släpvagn låg gränshastigheten
4.1.2
4.1.3
Tabell 4.1
14
vid 50 km/h som gav mycket kraftiga vikningstendenser.
Gränshastig-heten ligger klart lägre, uppskattningsvis 45 km/h.
Bromsning vid ingång i kurva med 100 m radie
Proven utfördes vid utgångshastigheter mellan 28 och 36 km/h. Erhållna medelretardationer låg mellan 0,43 och 0,5 m/s2 med lastade fordon och 0,77-0,80 m/s2 med olastade fordon.
I de fall där ingångshastigheten ändrats under i övrigt samma betingelser har detta inte påverkat retardationsresultaten på något entydigt sätt och oftast inte inneburit någon ändring. Skillnaden ligger främst i minskade svårigheter med stabilitet och väghållning.
Resultat för referenskombination LS.
Lastfall Bästa medel- Temperatur Utgångshast.
retardation
km/h
m/s2
1 Tjänstevikt 0,77-0,80 -6 - -l3°C 36
2 Last framtill 0,65-0,70 -4,6 - -lZOC 36
3 Last baktill 0,44-0,65 -2 - -7,4°C 32, 36
4 Tillåten bruttovikt 0,43-0,5O +0,8 - -10,4°C 28, 32, 36
Bromsning på split friction
Proven gav en bästa medelretardation på 2.0 m/sz. Föraren lyckades vid
nästan alla prov hålla kombinationen inom banbredden 3,5 m, men
girtendenserna var påtagliga på både lastbil och släpvagn, speciellt vid de första proven innan förarna hunnit lära sig bästa körteknik.
15
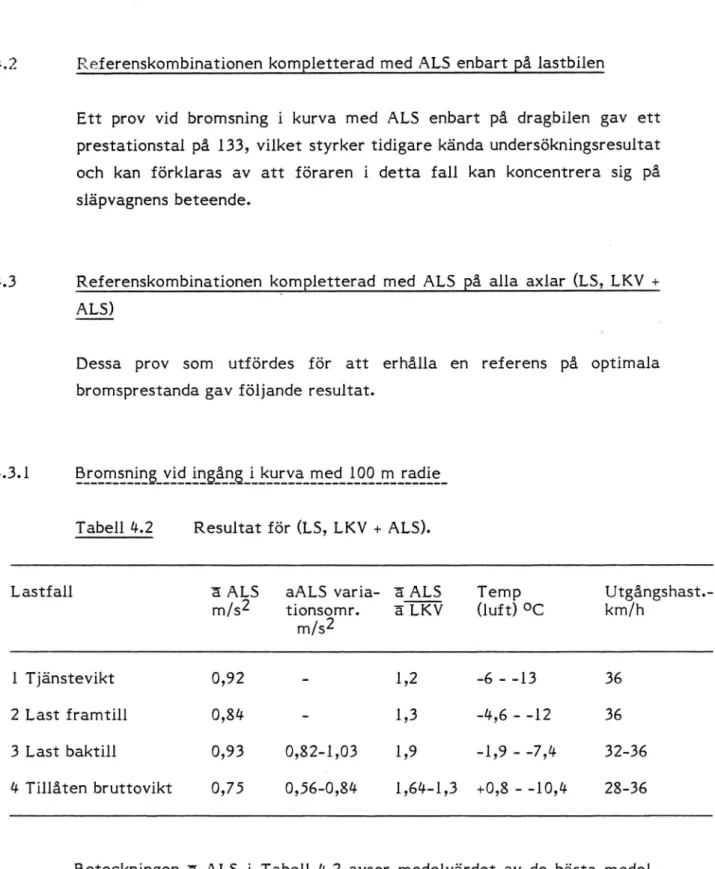
4.2 Referenskombinationen kompletterad med ALS enbart på lastbilen
Ett prov vid bromsning i kurva med ALS enbart på dragbilen gav ett prestationstal på 133, vilket styrker tidigare kända undersökningsresultat
och kan förklaras av att föraren i detta fall kan koncentrera sig på
släpvagnens beteende.
4.3 Referenskombinationen kompletterad med ALS på alla axlar (LS, LKV +
ALS)
Dessa prov som utfördes för att erhålla en referens på optimala bromsprestanda gav följande resultat.
4.3.1 Bromsning vid ingång i kurva med 100 m radie
Tabell 4.2 Resultat för (LS, LKV + ALS).
Lastfall ä ALS aALS varia- ä ALS Temp
Utgångshast.-m/s2 tionsomr. ä LKV (luft) OC km/h
m/s
1 Tjänstevikt 0,92 - 1,2 -6 - -13 36
2 Last framtill 0,84 - 1,3 -4,6 - -12 36
3 Last baktill 0,93 O,82-l,03 1,9 -l,9 - -7,4 32-36
4Tillåten bruttovikt
0,75
O,56-O,84
l,64-l,3 +0,8--10,4
28-36
Beteckningen ä ALS 1 Tabell 4.2 avser medelvärdet av de bästa
medel-retardationerna. Av resultaten framgår att de lägsta värdena erhållits för fullastade fordon. Enligt vad som framkommit vid tidigare forskning om friktion på is bör medelretardationen bli lägre med ökad last.
Temperaturen inverkar i princip så att medelretardationen bör bli lägst vid temperaturer nära noll grader och ökar med sjunkande temperatur. Inom området -5 till -lSOC har tidigare resultat visat sig vara i princip temperaturoberoende. Här redovisade resultat visar samma tendenser. UtgångshaStigheten har inte inverkat märkbart på resultaten.
4.3.2
16
Bromsning på split friction
Proven gav ett bästa medelretardationsvärde på 1,73 m/sz. Vid större
delen av proven erhölls dock värden på enbart ca 1,45 m/sz, vilket var
oväntat lågt. Det högre värdet överensstämmer bättre med resultaten från övriga fordon i denna undersökning och med resultaten från tidigare
prov med samma typ av antilåssystem och banuppbyggnad. Stabiliteten var mycket god vid proven med antilåssystem. Prov med alla hjul på
högfriktion gav en bästa medelretardation på 3,3 m/s2 och med alla hjul
på lâgfriktionsytan 0,63 m/sz. Utifrån dessa värden skulle teoretiskt
medelretardationen vara 1,97 m/sz. WABCO:s s k MIR reglering av fram-axlarna ger dock en lägre verkningsgrad.
L A S T B I L M E D S L ÄP V A G N ; L S ' D R A G B I L M E D P ÅH ÄN G S V A G N ; S L L V ÄJ N I N G K U R V A ' S P L I T = L a s t f a l l 1 = L a s t f a l l 4 L a s t f a l l 4
(z
(2
B r o m s s ys t e m H a n öve r -B r o m s s ys t e m H a n öve r -p r o v pro v WBXNIALLVH(BGUYAWBGBN) 13NNIALLVH(BGHYAWBGBW) D -S l å D r a g -S l äp ta g p b i l b i l 83031 VHSILIHN HVWXV VNSILIHX (BGUYAWSGBN) låHäVHäBWWOHLNON (BGHYAWBGSN) (538 AV lNBDOHd) VSVWHQdSNOHH S/N'lSHWBGBN) VSVNHQdSNOHG H/HX'lSVH XSILIHN HBGBW VXSILKHN HVWXV VXSILIHN (BGHVAWBQBW) (BGHYAWBGBW) BVddVULNOX (538 AV lNHDOHd) VSVNHQASNOHE S/w'lBUWEGBN) VSYNHQäSNOHH 'XVN HlNX'lSVH XSILIUX (\ (\ m HVddYHlNOX o lBHHVSHBWWOHLNOX m m 'XVN ** O \0 kB N Ln ä v N GX O V ÃJ N I N G _. V ÃJ N I N G >5
>5
I 17 R U R V A 0, 56 11 6 <1' [x LO Ln ".' KO 1-N 0 W Pm N ko <1 m r-O 1-LD ON :-\ O O O 1-M Q' ä 0 K U R V Å 0 , 5 0 S P L I T _ 0 1 2 72 9 1 9 1 , 6 50 S P L I T ' _. . O V ÃJ N I N G _ -0 , 9 2 45 8 4 , 5 ' 5 6 0 T V ÃJ N I N G -_ 97 7 + LK V m m m 0, 64 13 3 0 90 10 - _-* w K U R W 0, 77 16 0 0 16 2 7 S P L I T -S P L I T -_ _ _ _ V ÃJ N I N G -0. 92 45 8 4. 5, 6 60 V ÃJ N I N G -0 97 7'
_
LK
V
va
LE
V
LE
V
m
m
m
8:
32
:2
2
0,
05
94
10
4
+
+
;m
mm
0,
77
16
0
0
16
0
7,
AL S AL S AL S AL S . SP LI T 1, 72 86 0 16 TO _ 50 SP LI T _ _ ._ _ ._ _ _4 4 B e t e c k n i n g a r f ör m a n öve r p r o v: B g t e c k n i n g a t f ör T ên êve t p r o g : VÄJ NI NG -' VT I: s vâj ni ng sm an öve r VÅJ NI NG ' VT 13 5 Ya Jn fn gs ma no ve r KU RV A -Br om sn in g i kur va ?U RV Å Br om sn fn g 1_ kU IV § . . S P L I T -B r o m s n i n g på sp li t f r i c t i o n S P L I T -B r o m s n l n g pa sp 11 t f r l c t l o n Fi gur #. 1 Ba sr es ul ta t för pr ovk om bi na ti on LS . Fi gur 4. 2 Ba sr es ul ta t för pr ovk om bi na ti on SL L.
D U B B E L K O M B I N A T I O N D L L V ÄJ N I N G K U R V A S P L I T Li L a s t f a l l 4 L a s t f a l l 1 B r o m s s ys t e m D r a g -S l äp bi l D o l l y M a n öve t -pr ov (ZS/ VSVNUQJSNOUH W'lBHWSGBN) VSVWHQJSWOUH (338 AV lNBDOHd) (BGHYAWBGSW) ( låHöVHHBWWOHlNON TEXNIALLVHBGUYAWBGBN)'XVN (BUHVAWBGBN) HVWXV VNSll18N 83031 VXSIlIHN H/NX'lSVH NSKLIUX . . . i VÃJ NI NG HVddVHlNON o 9 0 m &C 00 F. Q' 0 F R I K U R V Å 1 0 5 1 6 7 12 45 8 S P L I T 4 50 VÃJ NI NG 61 S T E L K U R V Ä 91 S P L I T 78 50 VÃJ NI NG 64 . F R I K U R V A 11 1 S P L I T VÃJ NI NG 85 61 S T E L K U R V Å 1 1 4 16 1 S P L I T 10 0 91 50 L K V L K V A L S A L S VÃJ NI NG 90 FR I K U R V Ä 1 1 6 1 4 3 S P L I T 93 87 50 VÃJ NI NG 85 1 , 4 , 8 61 S T E L K U R V A 1 5 3 S P L I T 91 90 50 K U R V Å G P L I T L. . Figur 4.3 B e t e c k n i n g a r för ma növe rp ro v: VÄJ NI NG -V T I : s väj ni ng sm an öve r -B r o m s n i n g i kur va -B r o m s n i n g på Sp li t ft ic ti on Ba sr es ul ta tför pr ovk om bi na ti on DL L. D U B B E L K O M B I N A T I O N D L K V ÄJ N I N G K U R V A S P L I T = L a s t f a l l 4 L a s t f a l l 1 (3 B r o m s s ys t e m D r a g -bi l S l äp D o l l y H a n öve r -pr ov VDVNEQdSNOHG S/N'lBHWBGBW) VDVHHQdSNOBH öVddyälNOX (338 AV lNBDOHd) (BGUVAWBOBN) 13NN1ALLV8 (308YA1303N) 'XVN UVWXV VNSILIHN (BUHYAWBGBN) 13H8V88311OHLNON H/NX'lSVH XSILIHX 83031 VNSILIUM VÃJ NI NG 1 m <1' M 5 O O F_ (x \D N P CO 1 F R I K U R V Ä u? LO O 0 m O S P L I T _ VÃJ NI NG 0. 25 45 60 S T E L K U R V Ä 11 3 2: 5 90 S P L I T 82 0 , 2 90 50 VÃJ NI NG 0 , 3 45 58 ' F R I X U R V A 154 S P L I T VÃJ NI NG 0, 25 45 ' 60 S T E L K U R V R 1 3 2 1 2 0 S P L I T 95 L K V A L S L K V VÃJ NI NG 0 . 3 45 F R I K U R V A 0 ' 18 0 S P L I T A L S VÃJ NI NG S T E L K U R V A S P L I T
K U R V Å S P L I T B g t e c k n i n g a r för ma növe rp ro v: V A J N I N G -V T I : S väj ni ng sm an öve r -B r øm s n i n g i k ur va _ -B r o m s n i n g på Sp li t f r i c t i o n Figur 4. 4 Ba sr es ul ta t för pr ovk ombi na ti on DL K. 18
19 DUBBELKOMBINATION'DLL Bromssystem ?Dolly'
Drag-_
bil SläpManöver-prov Prestationstal(procent av
referenskombina-tionens prestation) 50 150 l 1 I. VÃJNING / "I, '11/ //8 ff.. / 'I r'/ / ut.) /rl [15_/7'67 //-f'/ 7 1 2 4 / FRI KURVA 4 4 r i, I; ' Å / /' v // /// 2/1/ f/ / lf / . / / 4,/ ,/ / .f 1 f / 103 SPLIT / - . x/ /' / r' ,4 I I / / 88 I/ /
7
/ /J/ x / / SPLIT u // //I II, ,2 /VAJNING x///,/// /",/Ä// 103
4"" ;ej 1, i A ' 3.1/ ,KSTEL KUR A
-V
,////J/ /'/
/, ////
//"/ /
,. 84 ./ )// ,, / ,/ _' /r 1./ 8 O FRI .. / 'J/ .7 z //. / ,lt-l; //zVAJNING
//.///{/ ,/,/>//,/;124
,' ' ' I/ / '/I 7 4 .I / / ' '/ x", 1 KURVA 104 SPLIT VÃJNING / ,. i' I; I ,- 'I// /Ö/Åg , 102*
//
f
103
STEL KURVA SPLIT LKV ALS VÄJNING FRI KURVA SPLIT VÃJNING 103 KURVA ,r ff 7 i ,I . I_ 11 .i 7' Ti / ///z / z »1
/ x x'// ,x rf / / /?150
//,/ / : f/ J;/I f// / /I :l 4 'I I. 'STEn
SPLIT 93 \\ Ix* Beteckningar för manöverprov:VÃJNING - VTI:s väjningsmanöver
KURVA
SPLIT - Bromsning på Split friction- Bromsning i kurva
'*Data för stel dolly
insatt-Prov med fri dolly saknas.
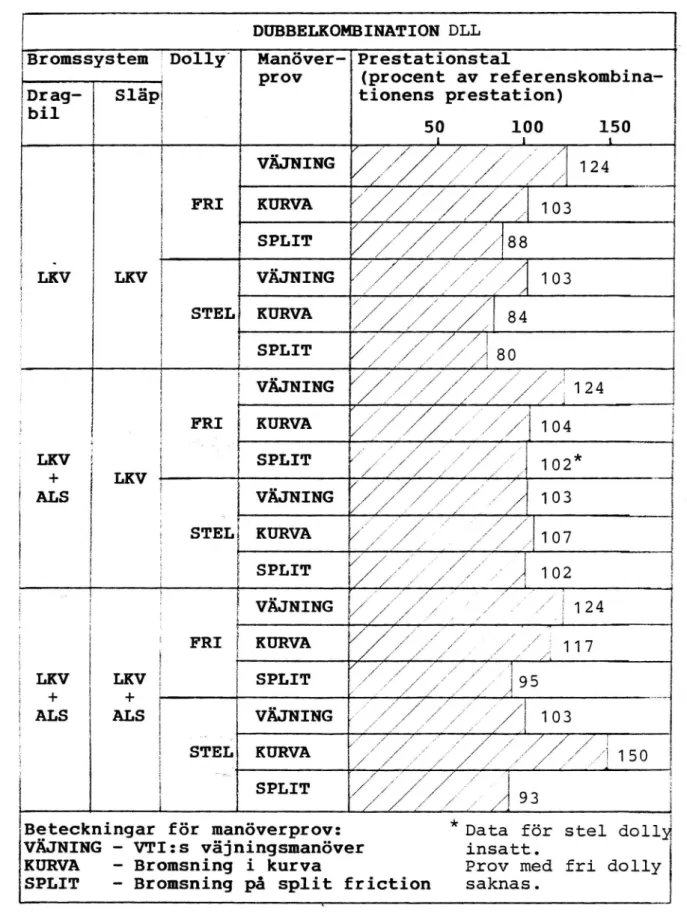
Figur 4.5 Sammanvägda delresultat för provkombination DLL i form
20
DUBBELKOMBINATION DLK
Bromssystem Dolly Madäçer- Prestationstal .
prov (procent av
referenskombina-Drag- Släp tionens prestation)
bil
50 100 150
1_ I I
VÄJNING
99
FRI
KURVA
i,(/,///,///:/<//x,115
SPLIT
r //i //f/Q/'82*
.. / I' 1. //K ø/r I' _,LKV
LKV'
VAJNING /r ///,//Å,/Ã,K/.106
§ ,z/ /, /,Ep./,* STEL KURVA
w/ ////j/, //M 91
SPLIT _
I//SWp/',*182
VING ///// l//_ //// /i//L 9 9 4/ lf ' /l / { 7 f, / I, K, ll. 1, w' --' / *' / ' / ,I , ' ,v' V /// //1 1 ,r4/ .1 Ix / _// // J/ J./ i I I, I_ [7/ Jr' V X. I'LKV
SPLIT
/Ä/',",/* g // 92*
_/ r 1,/ + LKV . n 7 V ,7 _ i 1, I. 1' ,'I ,/, f."ALS
VAJNING / ;',w,/ / //,/jw106
2
' S / ,- S Vi / / /pj / LSTEL KURVA
, ,* / ø*,/,/l
103
,.-' ,i //VÅ ,f / /'/ I 11"/ 1 /l/ r ä V /F /A /VAJNING * /ç//,//////,/ +99
{ ' t' / / _. r ' f 7:; /FRI
KURVA
/// /
l/ / //// 14 4
LKV'
va
SPLIT
/f/////"//,/Å/;/ 109*
ALS
ALS
VÃJNING /,/Ä/,x/,',': i/ 106
STEL KURVA
// / « , x //_xS,p/ ,.144
44// /f// .fx ;KA/' 7 '1,,4/ j/,x l . Å/I //f/l // //r/ 11/
//1/
,/b////,
Bgteckningar för manöverprov: *Data för stel dolly
VAJNING - VTI:S väjningsmanöver insatt.
KURVA - Bromsning i kurva Prov med fri dolly
SPLIT - Bromsning på Split friction saknas.
h
m
-Figur 4.6 Sammanvägda delresultat för provkombination DLK i
21
SINGELKOMBINATION SLL
Bromssystem
Manäver-
Prestationstal
prov (procent av
referenskombina-Drag-
Släp
tionens prestation)
bil §0 100 %50 I .. / / /
LKV
LKV
KURVA
// /
114
///l//, f 8 8 *LKV
VAJNING
/
156
+ / /x '/ jf/ //V i , I_ALS
LKV
KURVA
//
i_ 4
i, 162
SPLIT
102*
LKV
LKV
VAJNING
,_,//
//ç
15 6
+
+
,/ *;
"w
,1
ALS
ALS
KURVA
*'
1.
4_ ,I
2 162
SPLIT
3/ .
x w
/ /
,/ / å
95
*
.
Bçteckningar för manöverprov:
* Pata för StEl dOlly
VAJNING - VTI:s väjningsmanöver-
lnsatt-
.
KURVA
- Bromsning i kurva
PrOV med frl dOllY
SPLIT
- Bromsning på Split friction
saknas-Figur 4.7 Sammanvägda delresultat för provkombination SLL i form
22 KÖRDYNAMISKT PRESTATIONSTAL (P) (P för referenskombinationen är 100)
DUBBELKOMBINATION DLL LS DUBBELKOMBINATION DLK 120 115 112 122 119 120 105 108
-
102 102
100 -100 - - - w - -9T - - - d - -1- -1- - 95-* 0-0 :st273
50 _ >4 >4 ä >-l G N N N .-1 N 0-1 0-'1 >4 u-'l ä t-'I >4 >4 A >4 14 u-J -1 0-1 0 o-J .-1 u-'l s-'l n-'I »J :J Q 0 0-1 0 D 0-1 8 :J 0 0-1 0-1 8 0-1 0 D 8 O O H 0 8 8 0 D 0 m 9'53
H
H
:å
H
så
53
så'
...
H
ä
H rä
05; i;
'á
F3
ä
å;
få
53
få
ma.
ä
ma.
53
Drag- LKV LKV' LKV LKV' LKV LKV LKV bil + + + +ALS ALS ALS ALS
LKV
LKV
LKV
va
LKV
va
LKV
+ +
ALS ALS
Sammanvägningsfaktorer för kördynamiskt prestationstal (P)
VTI:s väjningmanövrer x 0,4
Bromsning i kurva y 0,4 P=0,4x+0,4y+0,22
Bromsning på Split friction z 0,2 '
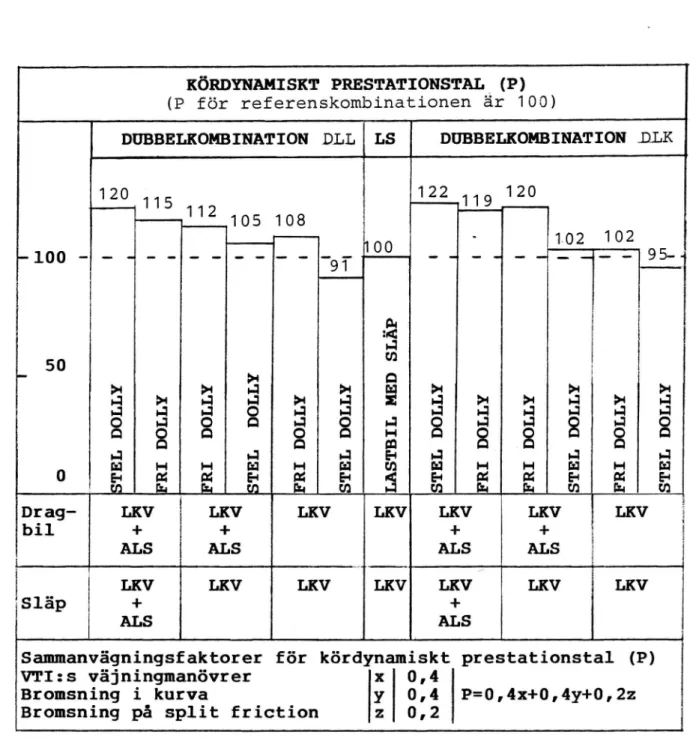
Figur 4.8 Sammanvägda totalresultat för provkombinationerna DLL
ouch DLK i form av kördynamiskt 'prestationstal relaterat 12111 referenskombinationens prestation.
4.4 4.4.1 4.4.2 4.5 4.5.1 23
Jämförelse mellan referenskombination och dubbelkombinationeri
grund-utförande (Fri dolly och lastkännande ventiler på alla axlar)
Dubbelkombination DLL
Av figur 4.8 framgår att det sammanvägda prestationstalet är 108 vilket innebär att DLL i denna undersökning visat sig vara något bättre med referenskombinationen redan i grundutförandet. Om man betraktar del-resultaten i figur 4.5 ser man att DLL erhållit något bättre resultat än referenskombinationen vid väjningsmanövern och bromsning i kurva och något sämre vid proven på split friction. Teoretiskt har man anledning att förvänta sig större svårigheter i det sistnämnda fallet med DLL:s korta tvåaxliga dragbil jämfört med referenskombinationens treaxliga
lastbil.
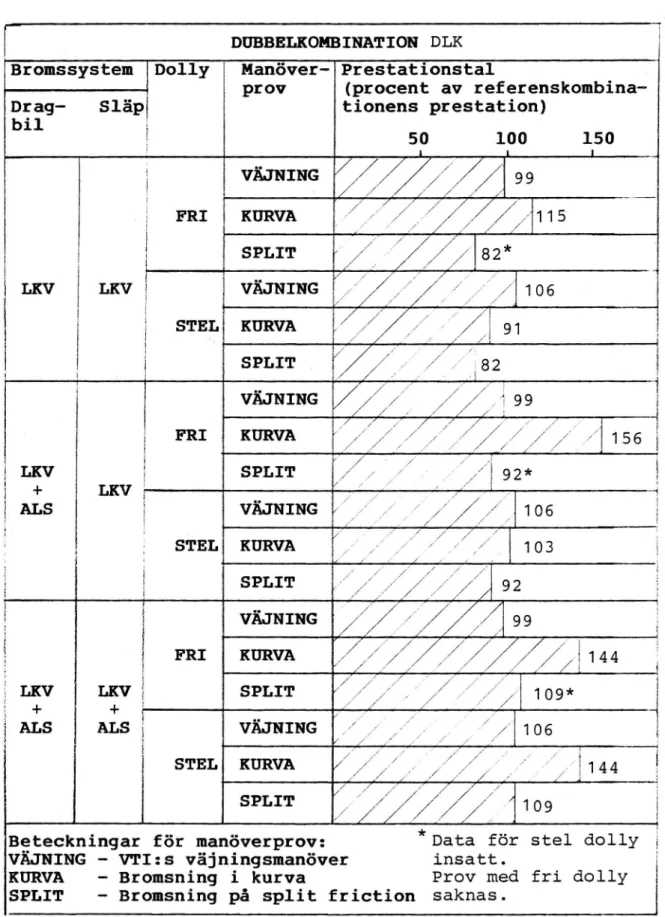
Dubbelkombination DLK
Det sammanvägda prestationstalet 102 i figur 4.8 visar att även DLK erhållit något bättre totalresultat än referenskombinationen. Av presta-tionstalen för de enskilda manöverproven i figur 4.6 framgår att likvär-digt resultat erhållits vid väjningsmanövern, medan 115 vid bromsning i kurva är påtagligt bättre och 82 vid bromsning på split friction är påtaglithSämre. Den betydligt lägre viktningen av det sistnämnda resultatet har dock medfört att det sammanvägda prestationstalet hamnat på 102. Kritiska axlar på denna fordonskombination har varit dels framaxeln på dragbilen som vid väjning som i gränsfallet tenderar att understyra dels den sista släpvagnens båda axlar som pendlar ut vid ingången till slutkorridoren när gränshastigheten i väjningsmanövern
överskrids.
Inverkan av stel dolly för dubbelkombinationer med lastkännande ventiler
Dubbelkombination DLL
Av figur 4.5 framgår att införande av stel dolly har medfört sänkta prestationstal för samtliga tre provtyper jämfört med fri dolly. Störst
4.5.2
4.5.3
24
sänkning har erhållits vid väjningsmanöverprovet och bromsning i kurva dvs i prov där styrförmågan är väsentlig. Närmast liggande förklaring är den stela dollyns negativa effekt att styra den första påhängsvagnen rakt fram i kurvor som blir mer påtaglig ju mindre kurvradien är. Nedsätt-ningen av prestationstalet vid split friction är svårare att förklara teoretiskt. En tänkbar förklaring kunde vara att dollyn i fritt tillstånd ställer sig i en viss vinkel mot färdriktningen och på det aktuella grusunderlaget då får bättre friktion.
Det sammanvägda prestationstalet enligt figur 4.8 är 91 och således inte bara lägre än i fallet med fri dolly utan även under
referenskombina-tionens nivå.
Dubbelkombination DLK
Införande av stel dolly på denna kombination har i detta fall haft en positiv effekt vid väjningsmanöverprovet där prestationstalet enligt figur 4.6 stigit från 99 till 106. Prestationen har däremot sjunkit från 115 till 91 vid bromsning i kurva. Prestationstalet för split friction som angetts i raden för fri dolly bygger inte på verklig mätning eftersom en sådan inte utförts utan på antagandet att prestationen var likvärdig i de båda fallen. Det fiktiva värdet behövs för beräkning av det sammanvägda totalprestationstalet i figur 4.8 som i detta fall blir 95 och således något
sämre än referenskombinationens.
Generaliserat resultat
\
För de provade dubbelkombinationerna i LKV-utförande har stel dolly haft en negativ effekt under de provade betingelserna utom för DLK vid väjningsmanöverprovet.
4.6
4.6.1
4.6.2
25
Inverkan av komplettering med ALS på dragbilen för de provade
dubbel-kombinationerna
Dubbelkombination DLL
Av figur 4.5 framgår att komplettering med ALS på dragbilen ökar prestationstalet vid bromsning i kurva från 84 till 107 i fallet med stel dolly medan prestationstalet vid fri dolly är praktiskt taget oförändrat. På split friction sker en förbättring från 80 til 102 vid stel dolly. Prov med fri dolly gjordes inte för denna kombination men en likvärdig förbättring har bedömts sannolik med hänsyn till att dragbilens stabilitet är kritisk i detta prov och att dess prestanda inte påverkas negativt av fri dolly i LKV-fallet.
Beträffande sammanvägda prestationstal höjs med ovannämnda hypotes
prestationstalet med fri dolly från 108 till 112 och med stel dolly från 91 till 105 enligt figur 4.8.
Komplettering med ALS på dragbilen medför således i fösta hand en kraftig förbättring av prestationen på split friction som i oförberedd situation torde vara större än vad värdena ger vid handen. Med ALS på dragbilen blir alla delprestationer likvärdiga eller bättre än
referens-kom binationens.
Dubbelkombination DLK
Enligt figur 4.6 medför i detta fall en komplettering med ALS på dragbilen även här en förbättring av prestationstalen. Vid bromsning i kurva erhålls en ökning från 115 till 156 vid fri dolly och från 91 till 103 vid stel dolly. Vid bromsning på split friktion höjs värdena från 82 till 92 vid stel dolly och samma förbättring har förutsatts ske vid fri dolly. De sammanvägda prestationstalen höjs från 102 till 120 vid fri dolly och från 95 till 102 vid stel dolly. Komplettering med ALS har alltså vid dessa prov haft en klart positiv effekt i samtliga fall.
4.7
4.7.1
4.7.2
26
Inverkan av komplettering med ALS på samtliga axlar för de provade
dubbelkombinationerna Dubbelkombination DLL
Av figur 4.5 framgår att en komplettering av grundutförandet LKV med ALS på samtliga axlar höjer prestationstalen i båda bromsproven. Broms-ning i kurva förbättras från 103 till 117 vid fri dolly och från 84 till 150 vid stel dolly. Resultaten från split friction ökar från 88 till 95 för fri dolly och från 80 till 93 för stel dolly. Uttryckt i sammanvägda
prestationstal är förbättringen för fri dolly från 108 till 115 och för stel
dolly från 91 till 120.
Också jämfört med komplettering med ALS enbart för dragbilen innebär kompletteringen till ALS för samtliga axlar en förbättring av prestanda* för bromsning i kurva. Ökningen är här från 104 till 117 vid fri dolly och från 107 till 150 vid stel dolly. På split friction kan man däremot notera en sänkt prestation från 102 till 95 respektive 93 för fri och stel dolly. Sammanvägt erhålls en ökning vid både fri och stel dolly från 112 till 115 respektive från 105 till 120 enligt figur 4.8.
Dubbelkombination DLK
Figur 4.6 visar att en komplettering till ALS utöver LKV på samtliga axlar innebär en prestationsökning i denna undersökning i de båda
bromsproven. Prestationstalet vid bromsning i kurva höjs från 115 till-144 vid fri dolly och från 91 till till-144 vid stel dolly. Split friction prestanda förbättras vid stel dolly från 82 till 109 och sam ma förbättring
har antagits i fallet fri dolly där inga mätningar gjorts.
De sammanvägda prestationsvärdena ökar från 102 till 119 för fallet fri
dolly och från 95 till 122 för fallet stel dolly.
Jämfört med komplettering av LKV enbart med ALS för dragbilen sker för DLK en förbättring i fråga om resultaten på split friction från 92 till 109 för stel dolly vilket också antas gälla för fri dolly som inte provades.
4.8
27
Vid bromsning i kurva innebär tillkomsten av ALS på släpfordonen en försämring från 156 till 144 i fallet fri dolly medan det vid Stel dolly blev
en förbättring från103 till 144 i prestationstal enligt figur 4.6.
Det sammanvägda prestationstalet är i fallet för fri dolly i det närmaste
oförändrat medan det vid stel dolly ökar från 102 till 122. Fördelarna
med ALS på samtliga axlar torde vara större än vad prestationstalen
visar i överraskande kritiska situationer.
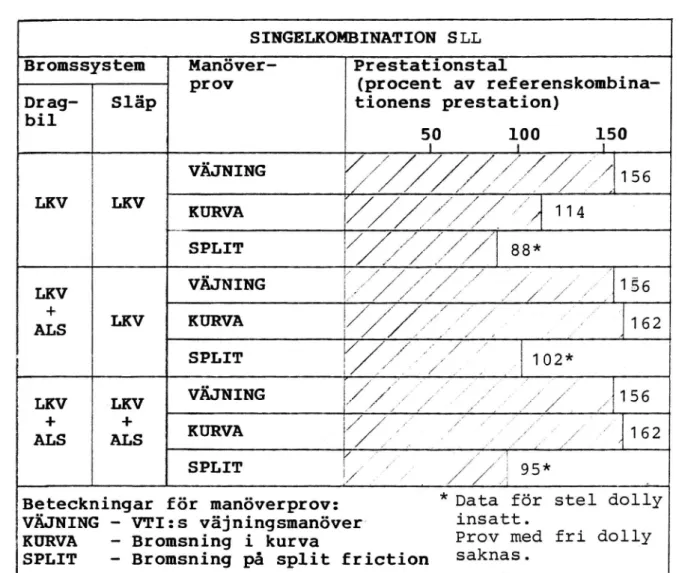
Dragbil med påhängsvagn (SLL) i jämförelse mellan
referenskombina-tionen respektive dubbelkombinareferenskombina-tionen DLL
Av figur 4.7 framgår att kombinationen SLL med LKV har ett presta-tionstal på >157 vid väjningsmanöverprovet och på 114 vid bromsning i kurva. Prov på split friction utfördes inte, men sannolikt har SLL likartade prestanda som DLL eftersom dragbilen var den begränsande
faktorn för denna. SLL är således mycket överlägsen i
väjningsmanöver-provet vilket också teoretiskt var att förvänta och har också bättre prestation vid bromsning i kurva.
Komplettering av bromssystemet med ALS på dragbilen höjde presta-tionstalet från 114 till 162. Komplettering av bromsarna på samtliga axlar med ALS gav också prestationstalet 162. Den ökade säkerheten mot sladd på påhängsvagnen avspeglas således inte i prestationstalet men kan lätt demonstreras om föraren ger så stor bromsansättning att påhängsvagnens hjul låser sig.
Prov på split friction gjordes inte heller med dessa bromsutrustningar av budgettekniska skäl då resultaten från proven med DLL inte gett några stabilitetsproblem och från koppling av de bakre fordonsenheterna
bedömdes ha liten betydelse för denna med avseende på
bromskraftför-delning väl avstämda kombination. För att kunna göra en total samman-Vägning har DLL:s prestationstal använts som ersättning av kördynamiskt prestationstal (P) (se även figur 4.8) framgår av tabell 4.3.
4.9
Tabell 4.3
28
Sammanvägt totalresultat för provkombinationerna SLL och DLL.
Bromsutrustning
Kördynamiskt prestationstal (P)
Dragbil LKV LKV + ALS LKV + ALS
Släpfordon LKV LKV LKV + ALS
Kombination
SLL 126 148 146
DLL, fri dolly
108
112
115
DLL, stel dolly 91 105 120
Av tabell #.3 framgår att SLL inte bara är klart bättre än referens-kombinationen vid dessa prov utan också jämfört med DLL i samtliga varianter. Komplettering med ALS har gett mycket gott resultat.
Jämförelse mellan dragbil med 12 m lång pâhängsvagn (SLK) och referenskombinationen lastbil med 12 m lång släpvagn
Fordonskombinationerna jämfördes med pâhängsvagnen respektive släp-vagnen lastad men med lastbilen olastad. För jämförelsen användes väjningsmanöverprovet.
Kombinationen SLK uppnådde en hastighet av 55 km/h jämfört med 51
km/h för den dellastade referenskombinationen. Detta motsvarar
presta-tionstalet 116 för SLK jämfört med ifrågavarande variant av
referens-kombinationen som här kördes med stödaxeln nere. Ett enstaka prov vid'
50 km/h med upphissad stödaxel visade på kraftig instabilitet vid denna hastighet för detta fall. Lägre hastighet kördes inte men
gränshastig-heten uppskattas till högst 45 km/h.\
4.10
Tabell 4.4
29
Inverkan av lasttillståndet på bromsningsegenskaperna vid bromsning i
kurva
Resultatet av denna undersökning som genomfördes med dubbelkombina-tion DLL med stel dolly i jämförelse med referenskombinadubbelkombina-tionen LS, LKV framgår av tabellerna 4.4, #.5 och 0.6. Jämförelsen avser
fordons-kombinationerna i samma lasttillstånd.
Av tabellerna framgår att resultaten för DLL vid de olika dellasttill-stånden varit bättre än vid tillåten bruttovikt utom i fallet med LKV + ALS på samtliga enheter. Detta gäller preStationen relativt referens-kombinationen och inte absolut. Absolutvärdena visar bättre retardation vid dellast under alla betingelser vilket tyder på väl avstämda
lastkän-nande ventiler.
Bromsförmåga för dubbelkombination DLL med LKV på
samtliga axlar samt stel dolly i procent av
referens-kombinationens prestanda.
Broms- Medel- Prestationstal i 96
Lastfall
' förmåga
retard.
av referenskomb. vid
96
m/s2
samma lasttillstånd
l Tjänstevikt 85 0,68 86
2 Last framtill 88 0,69 88
3 Last baktill 113 0,70 114
4 Tillåten bruttovikt 77 0,43 78
Tabell 4.5 Bromsförmåga för dubbelkombination DLL med LKV +
ALS på dragbil, LKV på släp samt stel dolly i procent av referenskombinationens prestanda.
Broms- Medel- Prestationstal i 96
Lastfall förmåga retard. av referenskomb. vid
96
m/52
samma lasttillstånd
1 Tjänstevikt 114 0,97 115
2 Last framtill 109 0,82 109
3 Last baktill 186 0,90 188
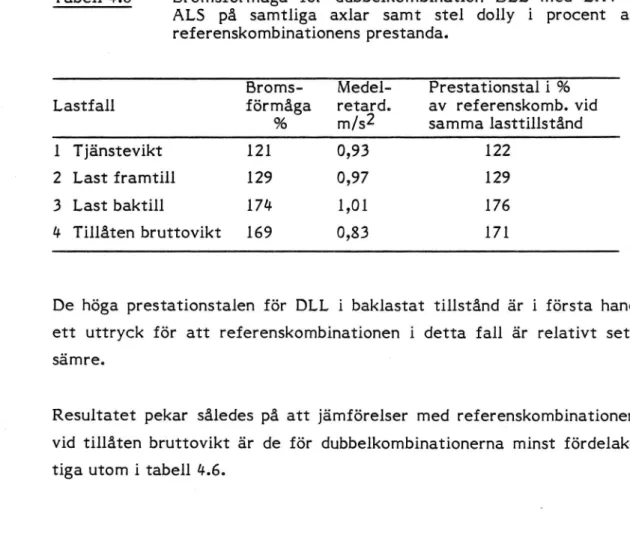
4.11
4.11.1
30
Tabell 4.6 Bromsförmåga för dubbelkombination DLL med LKV +
ALS på samtliga axlar samt stel dolly i procent av
referenskombinationens prestanda.
Broms- Medel- Prestationstal i %
Lastfall förmåga retard. av referenskomb. vid
% m/s2 samma lasttillstånd
1 Tjänstevikt 121 0,93 122
2 Last framtill 129 0,97 129
3 Last baktill 174 1,01 176
4 Tillåten bruttovikt 169 0,83 171
De höga prestationstalen för DLL i baklastat tillstånd är i första hand
ett uttryck för att referenskombinationen i detta fall är relativt sett sämre.
Resultatet pekar således på att jämförelser med referenskombinationen
vid tillåten bruttovikt är de för dubbelkombinationerna minst
fördelak-tiga utom i tabell 4.6.
Kompletterande värderingskriterier
Av föraren uppskattad maximal rattvinkel samt en kontrollerbarhets-bedömning noterades vid varje prov. Eftersom förarna körde var sin fordonskombination kan kontrollerbarhetsvärdena endastanvändas för jämförelser mellan olika varianter av samma kombination utom i fallet
DLL och SLL där föraren är densamma och SLL utgör en del av DLL.
Rattvinkeln är ett mera objektivt mått och kan utnyttjas för grova jämförelser av förarnas styrteknik.
Maximal rattvinkel
Medelvärdet av den uppskattade maximala rattvinkeln för olika
dolly-och bromsvarianter vid olika manövertyper dolly-och lastbetingelser redovisas
4.112
31
Av resultaten framgår att föraren av DLL och SLL använder betydligt större rattvinklar än LS och DLK vid väjningsmanövern. Införande av
stel dolly påverkar ihte resultatet. Den absoluta storleken av vinklarna
på DLL och SLL bedöms som helt acceptabel.
Vid bromsning i kurva är värdena för samtliga kombinationer ca dubbelt så stora som vid väjningsmanövern utan bromsning.
Med stel dolly och LKV på samtliga axlar ligger värdet på drygt ett halvt
rattvarv för DLL och strax under med fri dolly. Värdet bedöms som högt men fortfarande acceptabelt. Införande av ALS har i stort sett ingen
större inverkan på rattvinkeln vid bromsning i kurva. För DLK har dock ALS på dragbil och släp inneburit en ökning av vinkeln från 90 till 1800. Vid proven på split friction har DLL utan ALS återigen ca dubbelt så stora rattutslag jämfört med LS. Antilåssystem minskar här rattvinkeln till samma storleksordning som LS. För DLK innebär tillkomst av ALS på dragbilen i detta fall en mycket kraftig reduktion av rattvinkeln.
Kontrollerbarhetsbedömning
Kontrollerbarhetsbedömningen gjordes inom ramen för en lO-gradig skala
där 10 innebär mycket lätt kontrollerbar och O okontrollerbar
fordons-kombination. Resultaten återges i figur 4.13, 4.14, 4.15 och 4.16.
Figur 4.13 och 4.14 visar bedömningarna för DLL och SLL utförda av en professionell förare som inte tidigare sysslat med liknande provnings-verksamhet men med mångårig vana av yrkesmässig trafik med tunga fordonskombinationer. Bedömningstalen ligger mellan 3 och 9 d v 3 från
ganska hög svårighetsgrad till lätt kontrollerbar. Med undantag för
proven vid tjänstevikt har bedömningen blivit gynnsammare med ökad insats av ALS i kombinationen vilket i princip stämmer med de objektiva
mätresultaten. Det låga värdet för ALS vid split friction kan troligen förklaras av att proven inleddes med ALS-körningar och att
32
Figur 4.15 visar resultaten för DLK och figur 4.16 för LS. Båda dessa fordonskombinationer kördes av förare med tidigare erfarenhet av
prov-ningsverksamhet. Speciellt föraren av LS var väl förtrogen med de
aktuella provtyperna sedan tidigare. Bedömningen av
kontrollerbarhets-graden är för dessa två förare betydligt gynnsammare och mindre nyanserad. Föraren av DLK har genomgående bedömt varianten med stel dolly ogynnsammare trots att det objektiva resultatet vid väjnings-manövern var bäst med stel dolly. Tydligen har tendensen till för kraftig understyrning känt mera besvärande än tendensen till pendling hos det
33
BROMSUTRUSTN. LKV PÅ SAMTLIGA AXLAR
MAXIMAL RATTVINKEL (GRADER)
FORDONS- VÄJNING KURVA SPLIT DOLLY
KOMBINATION VINKEL K VINKEL K VINKEL K
LS (REFERENS) 45 1.0 95 1.0 72 1.0 DLL 90 2.0 167 1.8 147 2.0 FRI DLK 45 1.0 90 0.9 - FRI SLL 97 2.2 155 1.6 - FRI SLK 45 1,0 - - FRI DLL 85 1.9 205 2.2 135 1.9 STEL DLK 45 1.0 90 0.9 90 1.3 STEL
Figur 4.9 Uppskattad maximal rattvinkel vid prov med LKV på samtliga axlar i fordonskombinationen
K.= VINKEL/VINKEL(LS, REFERENS)
BROMSUTRUSTN. LKV+ALS PÅ DRAGBIL, LKV PÅ SLÄPFORDON MAXIMAL RATTVINKEL (GRADER)
FORDONS- VÄJNING KURVA SPLIT DOLLY
KOMBINATION VINKEL K VINKEL K VINKEL K
DLL 90 2.0 145 1.5 - - FRI
DLK 45 1.0 135 1.4 - - FRI
SLL 97 2.2 162 1.7 - - FRI
DLL 85 1.9 161 1.7 91 1.3 ' STEL
DLK 45 1.0 120 1.3 0 0 STEL
Figur 4.10 Uppskattad maximal rattvinkel vid prov med
LKV+ALS på dragbil och LKV på släpfordon
BROMSUTRUSTN. LKV+ALS PÅ SAMTLIGA AXLAR MAXIMAL RATTVINKEL
FORDONS- VÄJNING KURVA SPLIT
KOMBINATION VINKEL K VINKEL K VINKEL K DOLLY
DLL 90 2 0 143 1.5 87 1.2 FRI DLK ' 45 1.0 180 1.9 - - FRI SLL 97 2.2 160 1.7 - " FRI DLL 85 1.9 153 1.6 90 1.3 STEL DLK 45 1.0 110 1.2 0 0 STEL LS MED ALS 45 1.0 94 1.0 16 0.2 PÅ BIL OCH SLÄP
Figur 4.11 Uppskattad maximal rattvinkel vid provmed
34
MANÖVERTYP: BROMSNING I KURVA
BROMS- MAXIMAL RATTVINKEL (MEDELVÄRDE) FORDONS- DOLLY UTRUSTN. LASTFALL 1 LASTFALL 2 LASTFALL 3 LASTFALL 4
KOMB. BIL SLÄP VINKEL K VINKEL K VINKEL K VINKEL K
LS LKV LKV 91 1,0 111 1,0 147 1,0 95 1,0
DLL STEL LKV LKV 176 1,9 170 1,5 208 1,4 .205 2,2
DLL STEL ALS LKV 176 1,9 135 1,2 158 1,1 161 1,7
DLL STEL ALS ALS 100 1,1 112 1,0 160 1,1 153 1,6
LS ALS ALS 93 1,0 91 0,8 58 0,4 94 1,0
K = VINKEL/VINKEL(LS;LKV,LKV)
Figur 4.12 Uppskattad maximal rattvinkel vid bromsprov i kurva med olika lastfall och bromsutrustning för kombinationerna LS och DLL.
KOMBINATION DLL I KONTROLLERBARHETSBEDÖMNING
LASTFALL DOLLY BIL SLÄP VÄJNING KURVA SPLIT
1 STEL LKV LKV - 5,6 5,8
1 STEL ALS LKV - 4,8 6,3
1 STEL ALS ALS - 6,3 5,0
2 STEL LKV LKV - 5,4
-2 STEL ALS LKV - 6,5
-2 STEL ALS ALS - 8,4
-3 STEL LKV LKV - 5,1
-3 STEL ALS LKV - 5,8
-3 STEL ALS' ALS - 5,6
-4 STEL LKV LKV 6,0 3,2
-4 STEL 'ALS LKV 6,0 5,0
-4 STEL ALS ALS 6,0 6,2
-4 FRI LKV LKV 6,5 6,0
-4 FRI ALS LKV 6,5 6,3
-4 FRI ALS LKV 6,5 7,0
-1 FRI LKV LKV - - 5,0
1 FRI ALS ALS - - 7,0
Figur 4.13 Subjektiv kontrollerbarhetsbedömning för försöks-kombination DLL.
KOMBINATION SLL BROMSUTRUSTN.
KONTROLLERBARHETSBEDÖMNING
LASTFALL DOLLY
BIL SLÄP
VÄJNING
KURVA
SPLIT
4
-
LKV LKV
-
7,0
-4
-
ALS LKV
-
7,0
-4
-
ALS ALS
-
7,2
-Figur 4.14 Subjektiv kontrollerbarhetsbedömning för försöks-kombination SLL.
35
KOMBINATION DLK BROMSUTRUSTN. KONTROLLERBARHETSBEDÖMNING
LASTFALL DOLLY
BIL
SLÄP
VÄJNING
KURVA
SPLIT
1
STEL
LKV
LKV
-
-
9.8
1
STEL
ALS
LKV
-
-
9.3
1
STEL
ALS
ALS
-
-
10.0
4
STEL
LKV
LKV
8.7
7.5
4
STEL
ALS
LKV
8.7
7.3
4
STEL
ALS
ALS
8.7
9.1
4
FRI
LKV
LKV
10.0
9.3
4
FRI
ALS
LKV
10.0
10.0
4
FRI
ALS
ALS
10 0
10.0
Figur 4.15 Subjektiv kontrollerbarhetsbedömning för försöks-kombination DLK
KOMBINATION LS
BROMSUTRUSTN. KONTROLLERBARHETSBEDÖMNING
LASTFALL BIL SLÄP VÄJNING KURVA SPLIT
' 1 LKV LKV - 10.0 9.9 1 ALS ALS - 10.0 10.0 2 LKV LKV - 10.0 -2 ALS ALS - ;10.0 -3 LKV LKV - 9.4 -3 ALS ALS - 10.0 -4 LKV LKV 8.0 10.0 9.9 4 ALS LKV 8.0 10.0 -4 ALS ALS 8.0 10.0 10.0
Figgr 4.16 Subjektiv kontrollerbarhetsbedömning för försökskombination LS
5.1
5.2
5.3
36
RESULTATSAMMANFATTNING MED DISKUSSION Referenskombinationens prestationsnivå
Den till tillåten bruttovikt lastade referenskombinationen uppnådde vid väjningsmanöverprovet en gränshastighet av 60 km/h ochvid bromsning i kurva bästa medelretardationer mellan 0,4 och 0,5 m/sz. Vid bromsning
på split friction som kördes med tjänstevikt erhölls ett bästa värde på
2,0 m/sz. Ur stabilitetssynpunkt kritisk fordonsenhet var i de två först nämnda fallen släpvagnen och i det sistnämnda lastbilen.
Dubbelkombinationerna i grundutförande, dvs med fri dolly och LKV
De sammanvägda resultaten från utförda prov indikerar att båda dubbel-kombinationerna har något bättre köregenskaper än
referenskombinatio-nen under de provade betingelserna. Med hänsyn till den statistiska
osäkerheten och de små skillnaderna (mindre än 10 %) bör resultatet i första hand uttryckas som att undersökningen visar att dubbelkombina-tionerna är likvärdiga med referenskombinationen under de provade betingelserna.
Inverkan av komplettering med stel dolly
Stel dolly har på det provade isunderlaget gett något sämre total _ prestation för båda dubbelkombinationerna i grundutförandet. Orsaken är sannolikt den ökade tendensen till att gå rakt fram i kurva för det
första släpfordonet. Den stela dollyns stabiliserande effekt har dock vid
andra undersökningar visat sig fördelaktig vid höga hastigheter på underlag med högre friktion. Resultatet bör därför tolkas som en maning att förbättra den stela dollyn något, snarare än att inte använda den. Vid
väjningsprovet var stel dolly gynnsam för DLK som har den teoretiskt
5.4
5.5
37
Inverkan av komplettering med ALS enbart på dragbilen
Dennna komplettering gav en förbättring av prestationsnivån såväl med
fri som stel dolly.
Fördelarna ur säkerhetssynpunkt ligger främst i Ökad stabilitet och styrförmåga hos dragbilen.
En frågeställning som inte kunnat undersökas i detta sammanhang är hur stor risken är att föraren i en verklig kritisk bromsningssituation
glömmer att övervaka släpfordonets beteende. Hittills kända
bedöm-ningar* pekar dock på att totaleffekten av komplettering med ALS på dragbil bör vara positiv.
Inverkan av komplettering med ALS på samtliga axlar
Med denna komplettering erhölls de klart bästa totalresultaten för båda
dubbelkombinationerna, både med och utan stel dolly. De största för-delarna med antilåssystem, nämligen minskade krav på föraren i fråga om uppmärksamhet bakåt och bromsteknik, kommer dock inte fram vid
den typ av prov som använts här i den utsträckning som kan förväntas i en verklig trafiksituation.
5.6
38
Dragbil med påhängsvagn jämförd med referenskombinationen
Vid i denna undersökning utförda prov visade sig den från dubbelkombina-tion DLL erhållna kombinadubbelkombina-tionen LSS med tvåaxlig dragbil och 10 m lång påhängsvagn Överlägsen referenskombinationen. I synnerhet gällde detta väjningsmanöverprovet, vilket också teoretiskt var att förvänta. Den
hade också bättre resultat än DLL.
Resultaten vid väjningsmanöverprov med treaxlig dragbil och 12 m lång påhängsvagn erhållna från dubbelkombination DLK visade sig visserligen vara bättre än referenskombinationens med enbart släpvagnen lastad men var samtidigt sämre än de som erhölls med referenskombinationen fullt lastad. Orsaken till detta var dålig manöverbarhet på grund av kraftig understyrning, dvs tendens att gå rakt fram, hos dragbilen.