VTI notat 48-2000
PMS-fordonskostnader
O O O N w Q' ...I G ...0 O =Författare
Ulf Hammarström
FoU-en het
Trafiksystem
Projektnummer
80376
Projektnamn
Vägytans inverkan på fordensm
kostnader
Uppdragsgivare
Vägverket
Distributon
Fri
Väg- och
transport-farskningsinstitutet
l
Förord
Den här redovisade studien har utförts inom ett Vägverksuppdrag benämnt Vägytans inverkan på fordonskostnader . Projektledare på VTI har varit Anita Ihs. Kontaktman på. Vägverket har varit Johan Lang.
Genomförandet av den här redovisade studien har på VTI främst engagerat: 0 Eva-Marta Dioszegi, revidering av sambanden för reparationskostnader
Siv-Britt Franke, utskrift av dokumentationen
Ulf Hammarström, ansvarig för delstudier samt dokumentation Bo Karlsson, VETO-beräkningar
Staffan Nordmark, rådgivning avseende den fordonsdynamiska modellen. Linköping i augusti 2000
UlfHammarström
lnnehålsförteckning
Sammanfattning
1
2
3
3.1
3.2
3.3
44.1
4.2
4.3
4.4
5
6
6.1
6.2
6.3
6.4
6.5
606
7
10 11 12 Bilaga 1: Bilaga 2: Bilaga 3: Bilaga 4: InledningMålsättning
W:s planeringsmodellerAllmänna synpunkter
Objektanalys/investering (KAN/EVA)
VV:s befintliga PMS-modell
Tillgängliga beräkningsmodeller och underlag
HDM4
VETO
Vägytedata
Nyheter inom fordonskostnadsomrádet
Problembeskrivning
Metod
Inledning
Beräkningsförutsättningar med VETO
Val av ojämnhetsprofiler till olika IBlwnivåer
Analys av IRl-måttets lämplighet för att uttrycka
fordonskostnader
Betydelsen av olika kombinationer av vägmiljöbeskrivande
variabler och hastighet för fordonskostnader
Reparationskostnader
Betydelsen av vald ojämnhetsprofil och dess
beskrivning för med VETO beräknade dämpmotstånd
En analys av lRI-måttets lämplighet för att
uttrycka fordonskostnader
Betydelsen av olika kombinationer av
vägmiljö-beskrivande variabler och hastighet för fordons: kostnader, resultat
Reviderade samband för reparationskostnader Diskussion
Referenslista
Rullmotstând som funktion av hastighet? Tdsp och IRI Beräkningsförutsättningar för VETO, fordonsbcskrivningar Resultat av VETO-beräkningar charationskostnader VTI notat 48-2000
21
22
23
25
27
40
41
44
Vägytans inverkan på fordonskostnader av Ulf Hammarström
Statens väg- och transportforskningsinstitut (VTI) 581 95 LINKÖPING
Sammanfattning
Analyser baserade på VETO-modellen har påvisat brister i IRI-»måttets lämplighet för beskrivning av fordonskostnader då vägojämnheterna domi-neras av korta våglängder. Modellberäkningarna talar också för att den enkla typ av korrektionsfaktorer för vägyta som används i de ska EVA-sambanden bör vidareutvecklas speciellt för PMS-tillämpningar,
Vägverket har hittills använt olika beräkningsmodeller för fordonskostnader inom objektanalys/investering och inom PMS. Eftersom objektanalysens/investeringens modeller även omfattar beskrivning av vägytan finns det inget principiellt hinder för att använda samma modeller inom båda dessa områden.
De samband som används inom objektanalysen/investeringen har till stor del utvecklats med en mekanistisk beräkningsmodell benämnd VETO. Denna modell är unik såtillvida att den kan beskriva inverkan av vägojämnhet på bloa., bränsle-förbrukning och däckslitage efter mekanistiska principer.
De fordonskostnader som behandlas i detta notat har avgränsats till: bränsle-förbrukning; däckslitage och reparationskostnader.
Genomförda analyser med VETO har påvisat att det har stor betydelse med vilken täthet som ojämnhetsproñlen beskrivs. Olika analyser har utförts baserade på en ojämnhetsprofll som är uppmätt med en täthet av 0,05 m/avläsning. VETO-beräkningar har utförts med den uppmätta tätheten och genom att ta bort varannan avläsning. Den lägre tätheten gav i stort sett oförändrat [RI-värde medan dämpmotståndet i stort sett halverades. De korrektionsfaktorer för [RI som hittills ingått i objektanalysen/investeringen har varit baserade på tätheten 0,1 m/avläsning.
IRL-värden har beräknats för sinusproñler med olika våglängder och amplituder. Ökande amplitud gav ökande IRI medan IRI hade ett maximum för en våglängd av ca 2 m. [RI ökar med ökande våglängd upp till maxpunkten (2 m) för att sedan avta med ökande våglängd. Dämpmotståndet uppvisade följande samband:
0 ökande med ökande amplitud 0 ökande med avtagande våglängd.
Därmed finns det inte ett entydigt samband mellan IRI och dämpmotstånd, vilket medför ett ifrågasättande av IRI-måttets lämplighet som förklaringsvariabel till fordonskostnader.
Med VETO-modellen har beräkningar utförts med en systematisk variation av
följande variabler: IRI; siktklass; tvärfall/skevning; makrotextur och hastighet.
Syftet med dessa beräkningar har varit att utvärdera betydelsen av de enskilda variablema och eventuella samspelseffekter. För bränsleförbrukning ger VETO-beräkningar bl.a. följande:
0 inverkan av IRI:
=-=- starkt hastighetsberoende dvs° ökande [RI-effekt med ökande hastighet =- större relativa effekter för tunga än för lätta fordon
- mycket liten inverkan upp till IRI = 2 0 inverkan av tvärfall/skevning:
- för siktklass 1 medför ökande tvärfall/skevning Ökande bränsleförbrukning medan förhållandet är det omvända för siktklass 4
- mycket liten effekt upp till en avvikelse av 0,6 % från anvisningarna 0 inverkan av makrotextur:
- ingen påtaglig relativ inverkan av hastighet eller fordonstyp. För däckslitage ger VETO-beräkningen bl.a. följ ande:
0 inverkan av IRI:
- liten ökning med ökande hastighet
ett linjeföringsberoende som ger mindre relativ effekt för sämre än för bättre linjeföring
större relativa effekter för lätta än för tunga fordon mycket liten inverkan upp till IRI = 2
0 inverkan av tvärfall/skevning:
- för siktklass 1 ger ökande tvärfall/skevning ökande däckslitage medan för-hållandet är det motsatta för siktklass 4
- den relativa effekten är betydligt större för tunga än för lätta fordon 0 inverkan av makrotextur:
- de relativa effekterna är förhållandevis oberoende av både hastighet och for-donstyp.
För reparation/förslitning ger VETO-beräkningar avseende inverkan av IRI ett mycket starkt hastighetsberoende. De tillgängliga statistiska sambanden för beskrivning av reparationskostnader ( HDM4) innehåller inget hastighetsbero-ende.
Även vägnedbrytning kan förväntas öka med ökande IRI och där denna inver-kan ökar med öinver-kande fordonshastighet.
Eftersom de här redovisade analyserna har visat på samspelseffekter mellan de vägmiljöbeskrivande variablernas inverkan på fordonskostnader talar detta för att de enkla korrektionsfaktorer som används i de sk. EVA-sambanden bör vidare-utvecklas. Detta gäller både för objektanalysen/investeringen och för en eventuell tillämpning inom PMS-system.,
1
Inledning
Under 80-talet pågick ett förhållandevis intensivt svenskt FoU-arbete avseende vägyteeffekter på fordonskostnader. Bland annat pågick följande:
0 långa mätserier av bränsleförbrukning på olika vägytor (l) 0 däckslitagemätningar av tre typer:
- bilar som kördes speciella sträckor (18, 19) - mätning i laboratorium (20)
- mätning med provvagn (21)
0 rullmotstånd, litteraturgenomgång (13) 0 fordonsslitage, litteraturgenomgång (9)
0 utveckling av en mekanistisk beräkningsmodell (2).
Exakt hur resultaten av detta arbete utnyttjats i VV:s planeringssystem är inte helt klart. Resultat framtagna med den mekanistiska beräkningsmodellen (VETO) kan ha påverkat sambandet för fordonskostnader i det befintliga PMS-systemet, efter-som den person efter-som utvecklade sambandet använde sig av (2) då sambandet ut-vecklades.1
Ett fortlöpande arbete har pågått både under 80- och 90-talet med utveckling av mätsystem för vägytan (RST) och vägkroppen (RDT). FoU-arbetet avseende for-donskostnademas beroende av vägytevariabler har under 90-talet inte hängt med i i den utveckling som skett avseende kartläggning av vägytan. Det viktigaste arbetet avseende trañkantkostnaders beroende av vägförhållanden har skett inom ramen för revideringen av HDM från version 3 till 4. Även Sverige har deltagit i detta arbete genom insatser i VV:s regi (3).
1 Leif Fäldner, vv.
2 Målsättning
Syftet med föreliggande dokumentation är att ta fram alternativ till den befintliga fordonskostnadsmodellen i VV:s PMS-system. Ett förslag till uppläggning av en sådan modell har lämnats av VTI i (4). Parallellt med den här redovisade studien har en genomgång av HDM4:s kapitalkostnadsdel utförts avseende lämplighet för tillämpning under svenska förhållanden. (12)
På en mera detaljerad nivå skulle målsättningen för den här redovisade studien
omfatta följ ande: '
0 att ta fram underlag för bedömning av vilka vägmiljöbeskrivande variabler som bör ingå i en ny modell
0 att ta fram underlag för bedömning av hur olika variabler bör beskrivas 0 att genomföra viss revidering av tidigare använda samband
0 att undersöka vilken form som bör väljas på föreslagen modell.
Begreppet fordonskostnader har i denna dokumentation avgränsats till: bränsle-förbrukning; däckslitage och reparationskostnader. Eftersom den i analyserna an-vända beräkningsmodellen VETO (2) också omfattar en beskrivning av vägned-brytning har även detta mått kommenterats.
3
Wzs planeringsmodeller
3.1 Allmänna synpunkter
Den ideala bilden av ett planeringssystem för Vägverket borde vara att det totala anslaget skulle kunna fördelas på byggande, driftåtgärder och vinterväghållning så att maximal nytta av tillgängligt kapital skulle uppnås. Detta skulle förutsätta att samma effektberäkningsmodeller skulle användas oberoende av vilken grupp av åtgärder som betraktas.
Att använda samma effektmodeller är fullt möjligt eftersom vad modellerna egentligen skall beskriva är kostnader för olika tillstånd ifråga om väg- och trañkmiljö. Genom en åtgärd fås en förändring från ett tillstånd till ett annat och med därav följande förändring av effekter. För närvarande används helt olika modeller åtminstone för driftåtgärderoch objektanalys/investering.
3.2 Objektanalyslinvestering (KAN/EVA)
Beräkning av fordonskostnader och avgasutsläpp har i (5) indelats i länkeffekter och mereffekter i korsningar. Effekter för tomgångstid ingår inte. Andra typer av effekter som ingår i EVA-sambanden är kallstarteffekter och avdunstning.
Länkeffekter beskrivs som funktion av: linjeföringsklass och flödeshastighet. Flödeshastighet bestäms med en speciell modell för beskrivning av restidskost-nader.,
Mereffekterna i korsningar är funktioner av: flödeshastighet; andelen sväng-ande fordon och sväng-andel stoppsväng-ande fordon per utriktning.
Beträffande vägyta avser bassambanden följande:
0 torr MAB, medelgammal
0 IRI= 2
0 makrotextur TD = 0,5 (Sandpatch)
0 tvärfall och skevning enligt VV:s anvisningar.
Genom korrektionsfaktorer kan i (5) även följ ande tillstånd beskrivas:
0 vägyta: -- 5 cm snö - 2 cm snö -- väta 0 ojämnhet: - [RI = 7 -- [RI = 5 0 textur: - TD = 3,0 - TD = 1,8.
De fordonstyper som ingår i (5) är följande: 0 personbil
0 lastbil utan släp och buss, en gemensam beskrivning
0 lastbil med släp.
Varje fordonstyp indelas dessutom i tre ålderskategorier: A; B och C.
Fordonskostnadema uttrycks i ett första steg i fysiska storheter: slitage och för-brukning. I ett andra steg görs en koppling till värderingar dvs. effekterna kommer att uttryckas i monetära storheter. Detta andra steg har genomförts av VV.
Ett antal revideringar av EVA-sambanden har utförts av Vägverket. I dessa har en utökning skett på följande punkter:
0 personbilar har utökats till både bensin- och dieseldrift
0 lätta lastbilar, bensin och diesel, fanns inte med tidigare
0 ålderskategorier har utökats från tre till sex.
Revideringen utgörs huvudsakligen av att man, baserat på befintliga samband i (5) och på emissionsfaktorer/bränslefaktorer i (17) härlett nya samband.
3.3 W:s befintliga PMS-modell
Vägverkets befintliga PMS-modell finns dokumenterad i (6). Beskrivningen av vägmiljö är omfattande, vilket framgår avföljande variabellista:
Hastighet: Tillåten hastighet per körriktning.
Slitlager: bituminös; oljegrus; grus; sten; betong; YlG/YZG och förseglat grus. Trafik: ÅDT uttryckt i axelpar.
Tung trafik: trafikflöde (>3,5 ton) per årsdygn. Vägbredd: vägens bredd (m).
Vägkategori: europaväg; riksväg; primär länsväg; sekundär länsväg; tertiär läns-väg och sekundär eller tertiär länsläns-väg.
Vägtyp: motorväg; motorled; 4-fältsväg och vanlig väg.
Ytstandardklass: A; C; E; B; D; F1 och F2.,
Beläggningstyp: 27 olika koder enligt VÄG94.
Max stenstorlek: Avser den största stenstorleken i mm som ingår i en beläggning. Backighet: Vägbanans lutning i färdriktningen relativt horisontalplanet (%). IRI: Vägens jämnhet i längdriktningen (mm/m),
Kurvatur: Uppgifter om vägens horisontella kurvatur.
RMSlO: Ojämnheter i längsprofileringen i väglängdsområdet 3-10 m. RMS 30: Ojämnheter i längsprofileringen i väglängdsområdet 10--30 m. Spårdjup: Beräknad enligt den sk. trådprincipen.
Tvärfall: Vägbanans lutning i tvärled.
Följande uttryck används för beskrivning av fordonskostnader:
FK = (AFKI + BFKl x IRI + CFKI >< IRI2 + LB_AND ><(DFK1+ BFKI x
x IRI + FFKl >< 112.12» >< KI
LB_AND: lastbilsandel
Axxn, Bxxnn . ,: konstanter
KI: kostnadsindex
Kommentarer till den befintliga modellen:
0 ingen beskrivning ges av hur sambandet är framtaget
0 sambandet består egentligen av två, ett för lätta och ett för tunga fordon
0 man skulle förvänta att sambandet för lätta fordon skulle multipliceras med (1-LB_AND)
0 den enda vägminÖbeskrivande variabeln är IRI.
4
Tillgängliga beräknngsmodeler och underlag
4.1 HDM4
Revideringen av HDMIII till den nya HDM4 har pågått sedan början av 90-talet och har nyligen slutförts. En preliminär version av denya sambanden gavs ut 1995 (7). Det dagsaktuella läget framgår av en hemsida (www.htc.co.nz). Vad som har betydelse för fordonskostnader i denna modell är både själva fordons-kostnadssambanden och hastighetsmodellen. Eftersom HDM arbetar efter meka-nistiska principer har naturligtvis hastighet stor betydelse.
Rullmotstånd beskrivs enligt följande:
Fr: CR2 ><(b11>< NW + CR1x(b12 < M + b13 >< v2))...(N)
CRl: däckets rullmotstånd (diagonal = 1,3; radial = 1,0; lågproñl = 0,9)
CR2: vägytans bidrag till rullmotstånd NW: antal hjul b11 = 37 x Dw b12 = 0,067/Dw för äldre däckkonstruktioner = 0,064/Dw för nyare däckkonstruktioner
b13 = 0,012 >< Nw/Dw2
Dw: hjuldiameter (m) CR2 = Kcr2 X [a0 + a1 X Tdsp + a2 >< [RI] Kcr2: kalibreringsfaktorTdsp: makrotextur enligt Sandpatch (mm)
aO, al, a2: konstanter.
Det uttryck som här benämns rullmotstånd innehåller även transmissions-förluster genom termen CRZ >< b11 X NW . Därmed påverkas transmissions-förlustema enligt HDM av vägytans tillstånd. Detta är delvis en korrekt beskriv-ning genom att en del av förlusterna i transmissionen är direkt proportionella mot Överförd effekt. Däremot finns s.k. plaskförluster vilka endast är en funktion av varvtal. Denna del av transmissionsförlusterna påverkas inte av vägytan. Därmed är HDM:s beskrivning delvis felaktig, åtminstone om det angivna uttrycket skulle användas för att beskriva summan av plaskförluster och förluster kopplade till överförd effekt.
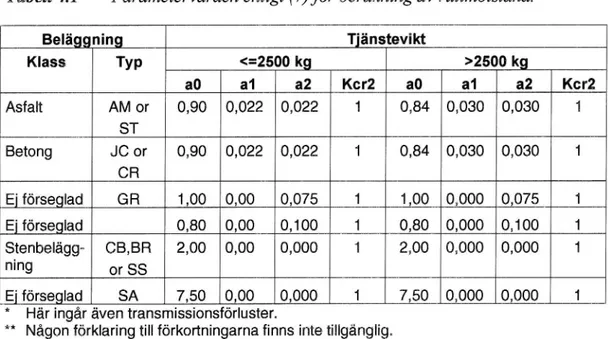
I tabell 4.1 redovisas de rekommenderade parametervärdena för beskrivning av rullmotstånd.
Tabell 4.1 Parametervärden enligt (7) för beräkning av rullmotstånd. * Beläggnifng Tjänstevikt Klass Typ <=2500 kg >2500 kg aO a1 a2 Kcr2 ao a1 a2 Kch Asfalt AM or 0,90 0,022 0,022 1 0,84 0,030 0,030 '1 ST Betong JC or 0,90 0,022 0,022 1 0,84 0,030 0,030 1 CR Ej förseglad GR 1,00 0,00 0,075 1 1,00 0,000 0,075 1 Ej förseglad 0,80 0,00 0,100 1 0,80 0,000 0,100 1 Stenbeläggn CB,BR 2,00 0,00 0,000 1 2,00 0,000 0,000 1
ning
or 88
Ej förseglad SA 7,50 0,00 0,000 1 7,50 0,000 0,000 1* Här ingår även transmissionsförluster.
** Någon förklaring till förkortningarna finns inte tillgänglig..
Denna del av HDM är ett någorlunda behändigt uttryck som ligger till grund för fortsatta beräkningar både av bränsleförbrukning och däckslitage.
I bilaga 1 redovisas resultat av beräkningar med HDM:s uttryck för rullmot-stånd baserat på parametervärden enligt tabell 401.,
I det totala färdmotståndet ingår en komponent för sidkraft., Uttrycket är identiskt med vad som ingår i VETO (2). Denna komponent ger möjlighet att beskriva inverkan av tvärfall, skevning och kurvradier:
2
<-M V -Mogez
PC, :
R
.104
NW-Cs R: horisontalradie (rn) e: tvärfall/skevning (m/m)Cs: avdriftsvinkel koefñcient (kN/rad)
Val av växlingspunkter kan ha stor betydelse för beräknade effekter med meka-nistiska modeller. I HDM4 har detta lösts genom att arbeta med en fördelning av växlingspunkter. Man riskerar därmed inte någon trappstegseffekt kopplad till växling för en liten hastighetsändring.
Eftersom hastighet har stor betydelse för fordonskostnader ges här en kort beskrivning av HDM:s hastighetsmodell. Modellen innehåller både en frifordons-del och en flödesberoende frifordons-del.
Frifordonsdelens resulterande hastighet omfattar följ ande delhatigheter: den begränsning som följer av tillgänglig motoreffekt (VDRIVE)
den begränsning i nerförslut som följer av tillgänglig bromseffekt (VBRAKE) den begränsning som följer av kurvatur (VCURVE)
den begränsning som följer av vägojämnheter (VROUGH) önskad hastighet under ideala förhållanden (VDESIR)
begränsning som följd av trañkreglering eller övervakning (VLIMIT).
0 0 0 0 0 . VTI notat 48-2000 13
Den resulterande hastighetsnivån ges av följ ande uttryck:
vss = exp (02/2) x ((VDRIVEy B + (VBRAKEYUB + (VCURVE)' B +
+ (VROUGH)' B + (VDESIRYUB + (VLIMIT)'1/B)'B
C: modellparameter
[3: modellparameter.
VROUGH borde vara av speciellt intresse i detta sammanhang: VROUGH = ARVMAX/(1,15 X IRI)
ARVMAX = 203 för personbil 180 för tung lastbil
160 för tung lastbil med släp.
Hastighetsmodellen har granskats av VTI ur statistisk synvinkel och med följande utlåtande: Det finns inga formella invändningar mot modellen, utan dess tillämp-barhet bestäms av hur väl den anpassas till empiriska data. 3
Hastighets - flödes - modellen baseras på följ ande parametrar: 0 frifordonshastigheter för tre fordonstyper
0 hastighet vid den nominella kapaciteten 0 hastighet vid den ultimata kapaciteten.
Den nominella kapaciteten definieras som den flödesnivå vid vilken alla fordons-typer har samma hastighet. Den ultimata kapaciteten är den flödesnivå Över vilken man har ett instabilt flöde.
En ambitiös insats har gjorts för att i HDM4 beskriva trängseleffekter på for-donskostnader. Dessa beskrivs som funktion av flödeshastighet.
Bränsleförbrukning beskrivs som funktion av den totala inre motoreffekten och verkningsgraden inne i cylindrama. Vad man vinner jämfört med att använda en konventionell motormapp är ökad generalitet. Man måste inte ha flera motor-mappar som i fallet med exempelvis VETO. Däremot behövs egentligen ett lika omfattande underlag i form av motormappar som med VETO för att uppnå en representativ beskrivning av verkningsgrad. Sannolikt tappar man något i nog-grannhet genom den förenklade beskrivningen. VETO ger en mycket god över-ensstämmelse mellan beräknade och uppmätta värden under förutsättning av att man har motormappar för det aktuella fordonet (14).
Den principiella utformningen av modellerna för reparationskostnader i HDM4 är densamma som i HDMIII. Vad som har ändrats är i huvudsak följande:
0 att man infört en kontinuerlig övergång mellan [RI <3 och IRI 23
0 att man infört en gruppering av varje fordonstyp i gammal och ny teknologi 0 att parametervärdena för gammal teknologi i huvudsak är lika med HDMIII 0 att parametervärdena för ny teknologi har skattats subjektivt genom att anta att
ny teknologi är ca 25 % bättre än gammal både ifråga om baskostnad och inverkan av IRL Detta resulterar i att merkostnaden för ojämnhet i stort sett halveras jämfört med gammal teknologi. Även åldersinverkan har reducerats för denna grupp
0 att reparationskostnader kan beskrivas som funktion av trängseleffekter.
Möjligheterna att använda HDM:s kapitalkostnadsmodeller har av VTI behandlats i ett separat PM (12).
3 Mats Wiklund, VTI.
4.2 VETO
VETO är en mekanistisk beräkningsmodell för beskrivning av primärt fordons-kostnader och avgasemissioner (2).)
Modellen kan indelas i:
0 en rutin för beskrivning av körförlopp för fria fordon
0 en rutin för beskrivning av de krafter som verkar på ett fordon
0 en rutin för beskrivning av förbrukning och förslitning inklusive avgasemis-sioner
0 en rutin för beskrivning av monetära storheter. Vad som också ingår är:
0 en rutin för beskrivning av linjeföreningsmåtten ADC och RF utifrån en inma-tad vägbeskrivning
0 en rutin för beskrivning av NlO-ekvivalenter inklusive dynamiska tillskott. Vad som speciellt utmärker VETO är följ ande:
0 den enda (7) fordonskostnadsmodell som beskriver inverkan av längsgående oj ämnheter enligt mekanistiska principer
0 mekanistiska beskrivningar avseende inverkan av både våt vågbana och snö 5' 0 validering avseende krafter och bränsleförbrukning
0 en mekanistisk bas för beskrivning av fordonsslitage.
Den viktigaste tillämpningen hittills borde ha varit utvecklingen av sambanden i KAN/EVA (5). Modellen har också använts för utvärdering på detaljnivå med en exakt beskrivning av linjeföreningen för enskilda vägobjekt.
För personbilar har inverkan av makrotextur kalibrerats baserat på de omfattande bränslemätningar som utfördes under 80-talet (1) och på uppgifter om typiska makrotextumivåer för olika Vägytor (16). Genom kalibreringen fick man en god överensstämmelse mellan VETO och bränslemätningarna. För tunga fordon användes de samband mellan rullmotstånd och makrotextur som redovisats i (13).
I VETO, användargränssnittet, beskrivs Vägytan genom:
o beläggningstyp
I
0 beläggningens ålder: ny; medel och gammal. Detta resulterar i ett makrotexturmått enligt (16). Utdata i form av fysiska storheter är bl.a.:
bränsleförbrukning däckslitage bromsslitage förslitningsindex olika avgasutsläpp resulterande körförlopp
framdrivningsarbete genererat av motorn bortbromsad energi
N 1 O-ekvivalenter.
Utdata i form av monetära storheter utöver ovan uppräknade storheter är bl.a.:
o reparationskostnader, arbetstid
0 reparationskostnader, komponenter
tidsberoende värdeminskning körlängdsberoende värdeminskning kapitalkostnader
0 overheadkostnader.
Inverkan av längsgående oj ämnheter har enligt tidigare tillämpningar av modellen varit mycket liten på exempelvis bränsleförbrukning. De mätningar av bränsle-förbrukning som utfördes i anslutning till utvecklingen av VETO uteslöt inte att modellresultaten kunde vara riktiga. Däremot finns andra studier som ger väsent-ligt större effekter. En av dessa studier är dessutom utförd av VTI med samma bil som användes vid valideringen av VETO. VTI har ansökt om medel från Väg-verket, vilka beviljats, för att under år 2000 kunna göra förnyade mätningar med maximal kontroll av alla tänkbara variabler som skulle kunna tänkas ha någon nämnvärd betydelse för bränsleförbrukning dvs.:
0 den exakta ojämnhetsprofllen makrotexturen
tvärfallet vägens lutning
meteorologiska förutsättningar.
Om möjligt borde utöver bränsleförbrukningäven accelerometrar användas för registrering av vertikala accelerationer.,
VETOzs bränslemodell har validerats (14) genom att för en bil mäta upp motormappar och genom att med samma bil utföra mätningar enligt olika kör-cykler på chassidynamometer och på väg. Avvikelsen mellanmodell och mätdata är mycket liten.
Inför de här aktuella beräkningarna med VETO utfördes diverse kontroller. Bland annat plottades det vertikala läget för den fjädrade massans tyngdpunkt. En något förbryllande iakttagelse var då att med ökande ojämnheter så sjönk tyngd= punkten allt längre ner relativt startnivån. Vid kontakter med fordonstekniker4 framgick att detta förhållande var vad man kunde förvänta sig.
Andra frågetecken har gällt om det är rimligt att ett personbilsdäck och ett stort lastbilsdäck har dämpkonstanter av ungefär samma storleksordning. Enligt till-gängliga data skulle så vara fallet.
4.3 Vägytedata5
Utförda RST-mätningar har av VTI lagts upp i ett register för olika statistiska analyser. Registret är avgränsat till belagda vägar med årsmedeldygnstrafik (Ãdt) större än 1 000. Registret innehåller exempelvis [RI för 20-meterssektioner. Den trañkviktade fördelningen ger följ ande percentilvärden:
0 l-percentilen, IRI = 0,50
0 50-percentilen, IRI = 1,30
0 99-percentilen, [RI = 5,68.
Det högsta [RI-värdet för en 20-meterssektion är 27,0.6
4 Staffan Nordmark, VTI.
5 Uppgifter framtagna av Hans Velin, VTI.
6 Enligt Johan Lang, VV: Värdet kan eventuellt hänföras till början av en mätsträcka där mätning startat från stillastående. Mätbilen har då inte uppnått jämviktstillstånd .
Om man istället betraktar glidande medelvärden över 250 m långa sektioner är det högsta [RI-värdet 24,4.
Uppgifterna om tvärfall på raksträcka (R > 4 600 m) är mera svårtolkade i och
med att man har värden i intervallet -16,4 % till 15,0 % där anvisningarnahar
2,5 %.
4.4 Nyheter inom fordonskostnadsområdet
I (8) redovisas en litteraturstudie avseende vad som tillkommit om samband mel-lan reparationskostnader och vägyta sedan en tidigare utgiven litteraturstudie (9). En slutsats av studien är att fortsatta studier av dessa samband är mindre ange-lägna för svenska förhållanden.
Ett förslag till komplettering av däckslitagemodellen med inverkan av luft-temperatur och våt vägbana redovisas i (3). Det uppges att däckslitaget förändras med 25 % för en förändring av lufttemperatur med 10°C. En våt vägbana kan reducera slitaget med 50 % jämfört med en torr vägbana.
Nya tillgängliga dataunderlag för kalibrering och analys är följ ande: 0 Konsumentverkets Bilunderhåll -enkät
0 ett större antal motormappar för mekanistisk simulering av bränsleförbrukning. Bilunderhåll (15), den kopia som VTI har tillgång till, avser en enkät utskickad under 1995. I enkäten frågas om samtliga typer av fordonskostnader. Dessutom finns alla fordonsdata samt mätarställning tillgänglig. Materialet omfattar totalt ca
10 000 enkätsvar.
Inom COST 3197 har s.k. motormappar sammanställts för ca 10 lätta och 30 tunga fordon. I en motorrnapp beskrivs bränsleförbrukning eller avgasutsläpp per tidsenhet som funktion av varvtal och vridmoment. Dessa motormappar kan bla.
användas i VETO-modellen.
'
Enligt uppgifter från HDM-gruppen8 har under senare tid mätningar utförts med accelerometrar i bilar parallellt med uppföljning av komponentförbrukning.
7 COST 319: Methods of estimation of atmospheric emissions from transport. European scientist network and scientific state of the art.
8 Chris Bennett. ND LEA.
5
Problem beskrivning
I V'st PMS-system görs inte generellt någon monetär Värdering för beskrivning av ett resulterande utfall° Istället betraktas effekt för effekt där de totala fordons-kostnaderna uttrycks med en funktion. För att kunna ta fram en total fordonskost-nad krävs att värderingar finns av de i fordonskostfordonskost-naderna ingående deleffekterna. I VV:s objektanalys/investering har VTI försett VV med samband som uttrycker förbrukning i fysiska storheter. VV står sedan för värdering av effekterna. Vilka förbrukningar, förslitningar och värderingar som den befintliga PMS-funktionen för fordonskostnader baseras på är inte känt.
Vägytan beskrivs i VV:s PMS-system med flera olika variabler och där fordons-kostnader skulle kunna uttryckas för vissa baserat på tillgänglig kunskap. För den grupp av variabler där sambanden för fordonskostnader inte är kända gäller följ ande alternativ:
0 att samband existerar och att dessa följer de kända sambanden 0 att samband av någon betydelse inte existerar
0 att samband existerar och att dessa inte följer de kända sambanden.
För extrema oj ämnheter som avviker från omgivande Vägytestandard kan man för-vänta inbromsningar. Några studier av sådana körförlopp är inte kända. För en känslighetsanalys skulle de mereffekter som ingår för stopp i objektanaly-sen/investeringen kunna utnyttjas. Där sådana inbromsningar förekommer kan betydligt större effekter förväntas än vad som kommer till uttryck genom ett för-höjt färdmotstånd. En blandning av inbromsningar och reducerad maxhastighet motsvarar objektanalysens/investeringens effekthastighetssamband för tätort.
Vägytans tillstånd kan påverka fordonskostnader både genom förändrad has-tighet och genom förändrade effekter för viss hashas-tighet. De i (10) framtagna kor-rektionsfaktorema avser effekt för viss hastighet undantaget inverkan av snö. Vid utveckling av en ny PMS-modell bör hanteringen av detta förhållande klargöras i ett tidigt skede.
Inverkan av de olika vägytevariablema är ofta inte linjära. Därmed kan vald beskrivning av Vägytan för olika variabler ha betydelse för beräknade effekter. Ett exempel på sådana icke-linjära samband är mellan IRI och dämpmotstånd, se tabell 6.1. Detta förhållande medför att ju längre sträcka som ett IRI-värde avser desto större underskattning kan förväntas. Enda möjligheten att hantera detta pro-blem är sannolikt att arbeta med en IRI-fördelning per sträcka istället för att arbeta med enbart medelvärdet som förklarande variabel.
I (10) har man valt att beskriva inverkan av vägytevariabler genom förenklade multiplikativa korrektionsfaktorer. Däremot har man mera fullständiga kostnads-samband för linjeföring och hastighet. Dessa kostnads-samband utgör den bas som korrek-tionsfaktorerna appliceras på. Denna konstruktion för beskrivning av vägyte-effekter utgör en förenkling. Betydelsen av denna förenkling är inte känd. Man kan förvänta att det finns större eller mindre samspelseffekter mellan alla väg-miljöbeskrivande variabler inklusive hastighetsnivå ifråga om inverkan på for-donskostnader. Dessutom finns samtidigt en inverkan på hastighet. Den största noggrannheten skulle uppnås om korrektionsfaktorer inte användes utan istället tabellverk där både variabler för väggeometri och Vägyta ingår. Av praktiska och resursmässiga skäl kan inte korrektionsfaktorer tas fram för alla kombinationer av vägytevariabler och hastighetsnivåer även om varje variabel beskrivs i mer eller mindre glesa punkter:
Störst noggrannhet skulle kunna uppnås om en beräkningsmodell av VETO-typ kunde användas direkt. Det är så man gör i HDM4.,
6
Metod
6.1 lnledning
Det verktyg VTI i stor utsträckning använt för beskrivning av fordonskostnader är VETO° Eftersom modellens mekanistiska utformning ger möjlighet att i princip beskriva inverkan av alla vägytebeskrivande variabler har detta verktyg valts för att besvara de flesta frågorna inom den här aktuella studien. Vad som för
när-varande inte kan beskrivas med VETO, åtminstone inte baserat på en mekanistisk ansats, är de totala kostnaderna för reparationer och underhåll. Dessa har istället
baserats på underlag ur HDM4.
6.2 Beräkningsförutsättningar med VETO
Den metod som använts för att ta fram VV:s EVA-samband finns dokumenterad i (10). De här använda beräkningsförutsättningama avviker från (10) på följande punkter:
0 nya ojämnhetsprofiler
0 två siktklasser, 1 och 4, istället för fyra
0 hastighetsberoende dämpdata för däck.
De fordonstyper som beräkningar utförts för enligt beteckningar och definitioner i (10) är följande:
0 Pb kategori B
0 Lb 14 ton, kategori B 0 Lb + sl, kategori B.
Kategori B motsvarar för personbil årsmodell 1990 och för övriga fordonstyper årsmodell 1993.
Ett nytt och förhållandevis omfattande underlag med rullmotståndsdata för per-sonbilar finns tillgängligtg. Om detta, sommardäck på en slät vägyta, jämförs med rullmotståndsdata enligt (2) gäller följande:
0 att något hastighetsberoende inte kunnat påvisas i de nya data 0 att de nya data är minst 8 % lägre
0 att det finns ett betydande texturberoende i de nya data.
6.3 Val av ojämnhetsprofiler till olika IRI-nivåer
I den version av VETO som redovisas i (2) förutsattes att slumpmässigt valda ojämnhetsprofiler med samma [RI skulle kunna förväntas ha samma fördelning av våglängder och amplituder. Mätningar av ojämnhetsprofiler till VETO-versionen i (2) genomfördes med PRIMALEN och med en täthet av 0,1 m mellan varje avläs-ning av den vertikala längsgående ojämnhetsproñlen. De uppmätta profilemas
värde beräknades till: 4,0; 5,6; 5,8 och 6,2. För att få profiler med högre
IRI-värden multiplicerades vertikalIRI-värdena med olika faktorer större än 1.
Genom VTI:s RST-grupp har nya ojämnhetsprofiler gjorts tillgängliga för VETO-beräkningar. Dessa profiler har ett kortare avstånd, 0,05 m, mellan varje vertikalavläsning, jämfört med de tidigare proñlema.
De nya ojämnhetsprofilerna är i flera fall mycket inhomogena avseende IRI per 20-metersintervall.
9 Ulf Sandberg. Opublicerade data.
Det bedömdes därför som lämpligt att bryta sönder dessa originalprofiler i mera homogena delar. Dessa delar har slutligen kombinerats till nya och mera homogena oj ämnhetsprofiler.
6.4 Analys av IRl-måttets lämplighet för att uttrycka
for-donskostnader
VETO-modellen kan matas med sinusprofiler för vilka man ger våglängd och amplitud. Ojämnhetsbeskrivningen ges i detta fall med en steglängd av 0,01 m. Beräkningar har genomförts för olika kombinationer av hastighet, våglängd och amplitud. Syftet med att beräkna effekter för sinusprofiler har varit både en modellkontroll och ett test av IRI-måttets möjligheter att förklara fordonskost-nader.
6.5 Betydelsen av olika kombinationer av
vägmiljö-beskrivande variabler och hastighet för
fordonskost-nader
Effekter har beräknats med en systematisk variation av följande variabler: fordonstyp: pb; tlb och tlb + sl
IRI: 0; 2 och 8
makrotextur (TD): 0,5; 1,8 och 3 mm Sandpatch
skevning/tvärfall (A): -1 %; 0 % och 1 %10
hastighet: 50; 70; 90 och 110 km/h
siktklass, 1 och 4.
Av resursskäl har det inte varit möjligt att genomföra beräkningar för alla kombi-nationer av dessa variabler utan en avgränsning har gjorts enligt följande:
0 kombinationer av variabler exklusive variation av TD
0 kombinationer av variabler exklusive variation av [RI och tvärfall/skevning. Den första punkten motsvarar kombinationer av:
0 tre fordonstyper tre [RI-klasser
tre tvärfall- och skevningsklasser fyra hastighetsnivåer
två siktklasser.
Den andra punkten motsvarar kombinationer av: 0 tre fordonstyper
0 tre TD-klasser 0 fyra hastighetsnivåer 0 två siktklasser.
Som beläggning har valts MAB av ålder Medel . Detta har endast betydelse för däckslitage enligt modellen. För att få däckslitage för andra vägytor kan följande modell för avnötningskoefficienter, enligt (2), användas:
10 I vägbeskrivningarna ingår tvärfall och skevning enligt VV:s anvisningar. Beräkningar har utförts för befintliga värden; genom att subtrahera 1 % från befintliga värden och genom att addera
1 % till befintliga värden.
KDSL = KDSLl X NY + KDSL2 X MEDEL + KDSL3 X GAMMAL + KDSL4 X TD
NY, MEDEL och GAMMAL är 0/1 -variabler.
KDSLl = 1,3 <10*5
KDSL2 = 1,2 ><10_5
KDSL3
8,2 ><10_6
KDSL4 = 5,1 x10"6.
Beräkningarna vars resultat redovisats i avsnitt 7 och i bilaga 3 baseras på
KDSL2: 1,2x 10'5 och KDSL4=5,1 >< 10 6.
De utdata som medtagits är: bränsleförbrukning däckslitage
dämpmotstånd förslitningsindex bil förslitningsindex släp
förslitningsindex gods på bil förslitningsindex gods på släp N10 för bil och för släp
HC, CO, NOX och PM.
De fordonsbeskrivningar som använts redovisas i bilaga 2.
6.6 Reparationskostnader
I (5) används samband för reservdels- och arbetstidskostnader enligt (11). Den använda modellen var den sk. HDMHI. Denna modell har modifierats under 90-talet och benämns numera HDM4. De förändringar som skett av sambanden för reparationskostnader kräver en omkalibrering. Samma dataunderlag som i (11) har använts för den nya kalibreringen.
Den nya reparationskostnadsmodellen innehåller två steg. Först görs IRI om till vad som benämnts RI. Reparationskostnader uttrycks som funktion av RI. För IRI betydligt under 3 är RI = 3 och för [RI betydligt över 3 är RI = IRI. Genom denna konstruktion fås en kontinuerlig övergång av reparationskostnader från området under [RI = 3 till området över [RI = 3. I HDM4 är det viktigt att generellt arbeta med kontinuerliga funktioner eftersom HDM4 innehåller en optimeringsrutin. Genom konstruktionen får man ett kontinuerligt icke-linjärt samband med väg-ojämnheter.
I HDM:s samband för beskrivning av reparationskostnader används inte monetära termer. Istället uttrycks kostnaderna för reservdelar som andelar av nybilspriset per sträckenhet och kostnaderna för arbetstid i timmar. I (1 l) användes följande nybilspriser för att kunna överföra reservdelsfunktionema till HDM-formen: 0 pb och llb, 93 000
0 tlb 7 t, 470 000 0 tlb (sl), 1 068 000.
För att göra om kostnader för reparationstid till tid användes värdet 154 kr/h, vil-ket motsvarar lönekostnad för bilreparationer exklusive moms. Enligt HDM kan de totala kostnaderna för en tung lastbil med släp uppskattas genom att multipli-cera bilkostnadema med 1,33.,
7
Betydelsen av vald ojämnhetsprofil och dess
beskrivning för med VETO beräknade däm
pmot-stånd
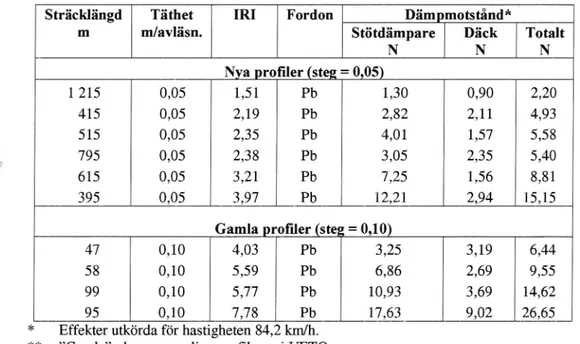
I tabell 7.1 redovisas dämpmotstånd för de förutsättningar som beskrivits i avsnitt 6.3. Med dämpmotstånd avses det dämparbete som skett i stötdämpare och i däcken delat med beräkningssträckans längd. Dämpmotståndet adderas i VETO till Övriga färdmotstånd. Vad som påverkas av färdmotståndet inklusive dämp-ningsbidraget är bränsleförbrukning, däckslitage och avgaser,
Tabell 7.1 Med VE TO beräknade [RI-värden och dämpmotstånd för gamla och nya ojämnhetsprofler. **
Sträcklängd Täthet IRI Fordon Dämpmotstånd*
m m/avläsn. Stötdämpare Däck Totalt
N N N
Nya profiler (steg = 0,05)
1 215 0,05 1,51 Pb 1,30 0,90 2,20 415 0,05 2,19 Pb 2,82 2,11 4,93 515 0,05 2,35 Pb 4,01 1,57 5,58 795 0,05 2,38 Pb 3,05 2,35 5,40 615 0,05 3,21 Pb 7,25 1,56 8,81 395 0,05 3,97 Pb 12,21 2,94 15,15
Gamla profiler (ste I = 0,10)
47 0,10 4,03 Pb 3,25 3,19 6,44
58 0,10 5,59 Pb 6,86 2,69 9,55
99 0,10 5,77 Pb 10,93 3,69 14,62
95 0,10 7,78 Pb 17,63 9,02 26,65
* Effekter utkörda för hastigheten 84,2 km/h.
** Gamla : de ursprungliga profilerna i VETO.
För IRI lika med ca fyra fås enligt gamla och nya modellen ett dämpmotstånd av 6.44 och 15.15 N. Skillnaden i effekter mellan de gamla och de nya proñlerna för motsvarande [RI-nivåer har tolkats vara ett uttryck för skillnader i täthet dvs. 0,1 jämfört med 0,05. Det bedömdes därför vara nödvändigt att byta ut de gamla mot
de nya profilerna.
För kontroll valdes en av denya ojämnhetsprofilerna ut, den med IRI= 3,97. Enligt tabell 6.1 gav denna ojämnhetsprofil följande dämpmotstånd:
0 stötdämpare, 12,21 N
0 däck, 2,24 N.
Varannan observation plockades bort varigenom avståndet mellan kvarvarande observationer blev 0,10 m. Detta gav följande värden:
0 IRI = 4,00
0 pb med 84,2 km/h:
- dämpmotstånd stötdämpare, 6,12N
- dämpmotstånd däck, 1,58 N.
Därmed blev IRI-måttet i stort sett oförändrat medan dämpmotståndet halverades.
Som ett genomsnitt över hela de nya sträckoma låg [RI i intervallet 1,51-3,97. För sträckan med 1,51 låg [RI per 20-meterssektion i intervallet 0,7-4,5.
Mot-svarande intervall för sträckan med 3,97 är IRI i intervallet 1,9-9,7.
Om effekter skall kunna beräknas för sträcklängder av några tiotal meter bedömdes det vara mera lämpligt med homogena profiler än med de nya prof1-lema i originalversion enligt ovan.
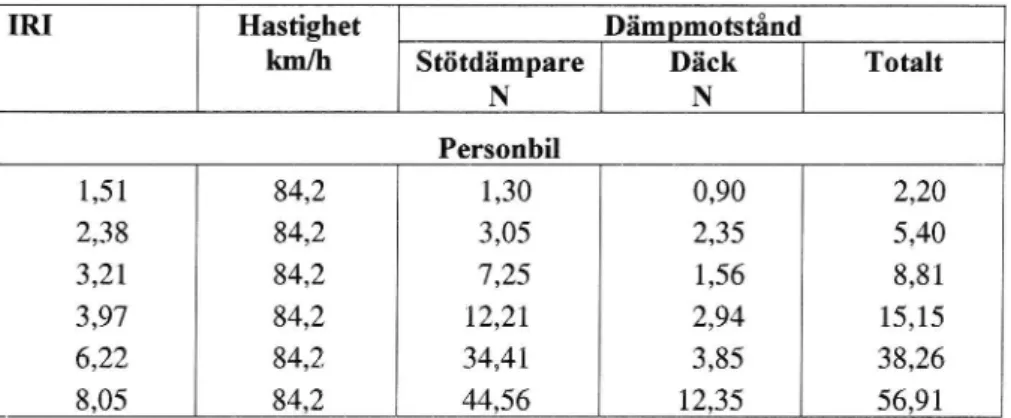
Därför bröts de nya profilerna upp i kortare delar vilka antingen per del fick utgöra en profil alternativt sattes samman av flera liknande delar till en ny profil. Beräknade [RI-nivåer och dämpmotstånd redovisas i tabell 7 .2.
Tabell 7.2 [RI-värden och dämpmotstånd för uppbrutna ojämnhetsprofiler.
Personbil. Avstånd mellan ojämnhetsobservationer: 0,05 m.
IRI Hastighet Dämpmotstånd
km/h Stötdämpare Däck Totalt N N Personbil 1,51 84,2 1,30 0,90 2,20 2,38 84,2 3,05 2,35 5,40 3,21 84,2 7,25 1,56 8,81 3,97 84,2 12,21 2,94 15,15 6,22 84,2 34,41 3,85 38,26 8,05 84,2 44,56 12,35 56,91
Vad som bl.a. har betydelse i VETO-beräkningama är kontaktytans längd dvs. mellan däck och vägyta. I beräkningarna har värdet 0,15 m använts för personbil
och 0,32 m för lastbil och släp.
8
En analys av IRI-måttets lämplighet för att
uttrycka fordonskostnader
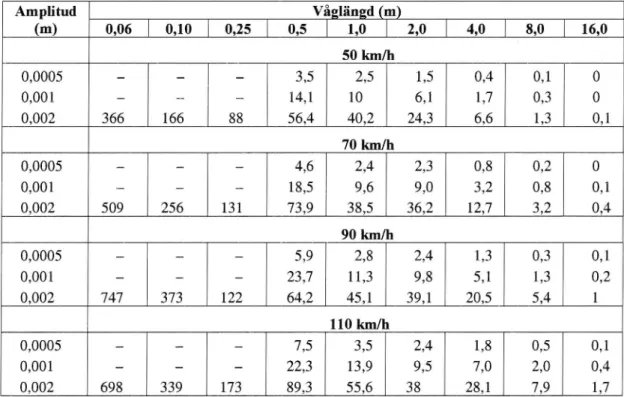
Beräkningsförutsättningama framgår ur avsnitt 6.2 och 6.4. I tabell 8.1 redovisas [RI som funktion av våglängd och amplitud för sinusprofller.
Tabell 8.1 [RI somfunktion av våglängd och amplitud sinusprojil.
Amplitud Våglängd (m)
(m) 0,06 0,10 0,25 0,5 1,0 2,0 4,0 8,0 16,0
0,0005 - - - 0,12 0,54 1,53 0,62 0,30 0,19
0,001 - - - 0,25 1,08 3,05 1,24 0,59 0,38
0,002 0,85 0,36 0,24 0,85 2,16 6,1 2,48 1,18 0,77
Enligt tabell 8.1 har IRI ett maximum vid våglängden 2,0 m för samtliga testade amplituder. Då våglängden minskas finns enligt tabell 8.1 en minpunkt vid 0,25 rn för amplituden 0,002 m.
De beräknade IRI-värdena har jämförts med ett facit, varvid en god
överens-stämmelse konstaterats.
I tabell 8.2 redovisas dämpmotstånd som funktion av våglängd, amplitud och hastighet för en personbil.
Tabell 8.2 Dämpmotsiånd (N) som funktion av våglängd och amplitud, sinus-profil, vid olika hastigheter. Personbil.
Amplitud Våglängd (m)
(m)
0,06 I 0,10 I 0,25 1 0,5
1,0 | 2,0 I 4,0 I 8,0 | 16,0
50 km/h
0,0005
-
-
_
3,5
2,5
1,5
0,4
0,1
0
0,001
-
_
-
14,1
10
6,1
1,7
0,3
0
0,002
366
166
88
56,4
40,2
24,3
6,6
1,3
0,1
70km/h
0,0005
-
_
-
4,6
2,4
2,3
0,8
0,2
0
0,001
-
-
-
18,5
9,6
9,0
3,2
0,8
0,1
0,002
509
256
131
73,9
38,5
36,2
12,7
3,2
0,4
90km/h
0,0005
-
-
-
5,9
2,8
2,4
1,3
0,3
0,1
0,001
-
-
-
23,7
11,3
9,8
5,1
1,3
0,2
0,002
747
373
122
64,2
45,1
39,1
20,5
5,4
1
110 km/h
0,0005
-
-
-
7,5
3,5
2,4
1,8
0,5
0,1
0,001
-
_
_
22,3
13,9
9,5
7,0
2,0
0,4
0,002
698
339
173
89,3
55,6
38
28,1
7,9
1,7
Enligt tabell 8.2 ökar dämpmotståndet med avtagande våglängd, med Ökande amplitud och med ökande hastighet, med ett undantag.
Undantaget avser våglängden 1,0 m och Ökning från 50 till 70 km/h.
Beträffande [RI-måttets lämplighet för att förklara variationen i fordonskostnader skulle resultatet av beräkningarna kunna sammanfattas enligt följ ande:
0 Ökande amplitud ger Ökande IRI och Ökande dämpmotstånd
0 Ökande våglängd ger Ökande IRI upp till 2 m och därefter avtagande IRI medan dämpmotståndet fortlöpande avtar med Ökande våglängd.
Därmed kan det fÖr ett och samma värde finnas olika dämpmotstånd. IRI-måttet är därmed inte ett lämpligt mått fÖr att uttrycka förändringar i fordonskost-nader, åtminstone inte fÖr våglängder under 2m. Frågan är om det fÖr närvarande finns något bättre mått? Om våglängdsfördelningen skulle kunna betraktas som konstant fÖr alla vägytor skulle IRI fungera på ett entydigt sätt fÖr beskrivning av fordonskostnader.,
9
Betydelsen av olika kombinationer av
vägmijö-beskrivande variabler och hastighet för
fordons-kostnader, resultat
Samtliga beräknade data (VETO) har redovisats i bilaga 3 dvs. även de som utgör underlag till ñgurerna.
Beträffande tvärfall/skevning används beteckningen dTVF dvs. avvikelserna från de Värden som skall gälla enligt Vst anvisningar.
Inverkan av IRI och tvärfall/skevning på bränsleförbrukning beskrivs i figurerna 9.1-9.6 för de olika fordonstyperna och siktklasserna.
E 0,95
:5 0,9
0181:0 dTVF=0
.8% 0,85
:- IRI=2 dTVF=-1
3 0,8
AIRI=2 dTVF=O
43 0,75
XIRI=2 dTVF=+1
=§ 0,7
>KlFll=8 dTVF=O
m 0,85
0,8
40
80
80
100
120
V(km/h)
Figur 9.] Bränsleförbrukningför personbil och sikt/dass 1. Inverkan av has-tighet, [R] och Wälfall/skevning.
»g 0,95
5; 0,9
0181:0 dTVF=O
8% 0,85
3IRI=2 dTVF=-1
3 0,8
AlFll=2 dTVF=O
43 0,75
x1|=1|=2 dTVF=+1
5 0,7
>KIRl=8 dTVF=O
m 0,85
0,8
40
80
80
100
120
V(km/h)
Figur 9.2 Bränsleförbrukningför personbil siktklass 4. Inverkan av hastighet, [RI och tväijfall/skevning.
6
E 5,5ä 5
0 IRI=O dTVF=O
.nå 4,5
MRI=2 dTVF=-1
3 4
AIRI=2 dTVF=O
% 3,5
XIRI=2 dTVF=+1
:ä 3
x IRI=8 dTVF=O
'3 2,5
2
40 60 80 100 120v (km/h)
Figur 9.3 Bränsleförbrukning för tung lastbil i sikiklass 1. Inverkan av has-tighet, [R] och ivärfall/skevning.
6 E 5,5 ä 5 IRI=O dTVF=O nå 4,5 i?! IRI=2 dTVF=-1
'g 4
A IRI=2 dTVF=O
å 3,5
x IRI=2 dTVF=+1
:ä 3
x IRI=8 dTVF=O
m 2,5
2 40 60 80 100 '120v (km/h)
Figur 9.4 Bränsleförbrukning för tung lastbil i sikiklass 4. Inverkan av
has-tighet, [R] och tva'rfall/skevning.
7
E 6,5g 6
o IR|=O dTVF=O
.nå 5,5
äIRI=2 dTVF=-1
3 5
A IRI=2 dTVF=O
å 4,5
XIRI=2 dTVF=+1
:g 4
>KIRI=8 dTVF=O
0 3,5
3
40
50
60
70
80
90
100
V(kmlh)
Figur 9.5 Bränsleförbrukning för tung lastbil med släp i siktklass I. Inverkan av hastighet, [R] och tvärfall/skevning.
å
. IRI=O dTVF=0
mä
I IRI=2 dTVF=-1
3
A IRI=2 dTVF=O
%
x IRI=2 dTVF=+1
:g
x IRI=8 dTVF=O
m40
60
80
100
v (km/h)
Figur 9.6 Bränsleförbrukningför tung lastbil med släp i siktklass 4. Inverkan av hastighet, [R] och tva'lfall/skevning.
Figurerna 9.1-9.6 kan kommenteras enligt följ ande: 0 inverkan av [RI på bränsleförbrukning:
- starkt hastighetsberoende dvs. Ökande IRI-effekt för ökande hastighet
- ett linjeföringsberoende som ger mindre relativt [RI-beroende för sämre än för bättre linjeföring
- större relativa effekter för tunga än för lätta fordon - mycket liten inverkan upp till IRI = 2
0 inverkan av tvärfall/skevning på bränsleförbrukning:
- för siktklass l medför ökande tvärfall/skevning ökande bränsleförbrukning medan förhållandet är det omvända för siktklass 4
- effekten är mycket liten för pb och för tunga fordon med en ökning upp till
ca 0,6 %.
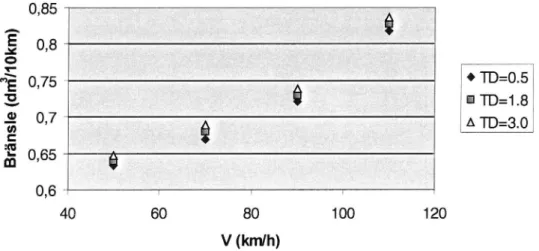
I ñgurerna 9.7-9.9 beskrivs inverkan av makmtextur på bränsleförbrukning.
0,85
g 0,8
2 mg 075 A *TD=O.5Ei
@
8'n0=113
då2, 0,7
å
ATD=3.0
:(6m 0,65
0,6 I I 140
60
80
100
120
v (km/h)
Figur 9. 7 Bränsleförbrukningför personbil i siktklass I. Inverkan av hastig-het och makrotextur (Sandpatch).
5,5 4,5 Ö TD=O.5 i TD=1.8 A TD=3.0 3,5 2,5
Br
än
sl
e
(un
i/
10
m)
1 ,5
40
60
80
100
120
v (km/h)
Figur 9.8 Bränsleförbrukning för tung lastbil i siktklass 1. Inverkan av has-tighet och makrotextur (Sandpatch).
o TD=O.5
TD=1.8
A TD=3.0
Br än sl e(d ni l1 0k m)40
50
60
70
80
90
100
v (km/h)
Figur 9.9 Bränsleförbrukningför tung lastbil med släp i siktklass I . Inverkan av hastighet och makrotextur (Sandpatch).
Inverkan av makrotextur på bränsleförbrukning uttryckt i relativa tal ger ingen nämnvärd skillnad mellan de tre fordonstyperna.
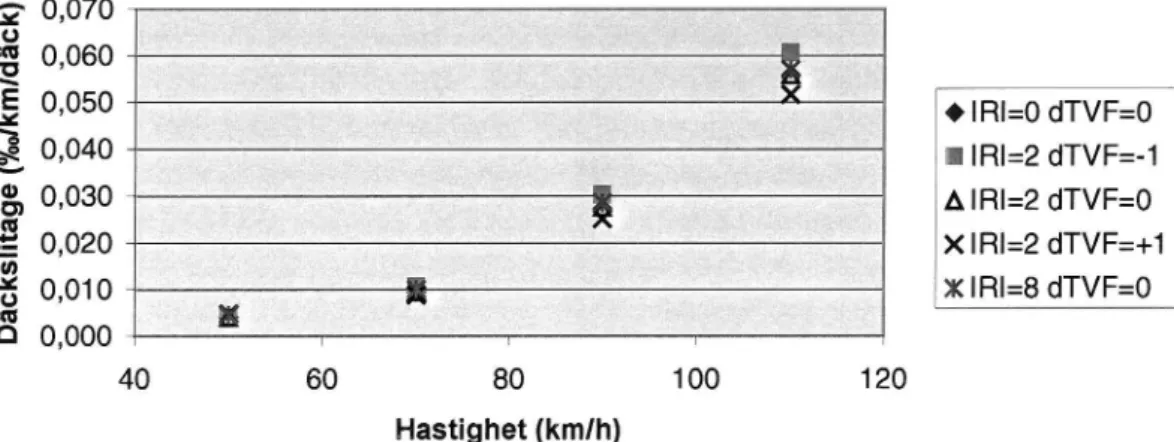
I figurerna 9.10-9.15 redovisas inverkan av hastighet? IRI och tvärfall/skevning på. däckslitage för olika siktklasser och fordonstyper.
få 0 012
E ,
x
*2 0,01
o|R|=0 dTVF=O
§ 0008
x
a IRI=2 dTVF=-1
.å 0'006
ä
@
AIRI=2 dTVF=O
2 03304
;5
XIRI=2 dTVF=+1
å 0,002
u
XIR|=8 dTVF=O
0
I
I
I .
40
60
80
100
120
Hastighet (km/h)Figur 9.10 Däckslitage för personbil i siktklass 1. .lnverkan av hastighet, IR] och tväig'all/skevning.
Däc ks li ta ge (% ol km ld äc k) 0,070 0,060 0,050 0,040 0,030 0,020 0,010 0,000 O IRI=0 dTVF=0 :il IRI=2 dTVF=-1 A IRI=2 dTVF=0 X IRI=2 dTVF=+1 >K IRI=8 dTVF=0 40 60 80 100 120 Hastighet (km/h)
Figur 9.11 Däckslitage för personbil i sikt/dass 4. Inverkan av hastighet, [RI och tvätfall/skevning. Däc ks li ta ge (% ol km ld äc k) 0,018 0,016 0,014 0,012 0,01 0,008 0,006 0,004 0,002 Figur 9.12 och tvärfall/skevning. 32 O IRI=0 dTVF=0 .I IRI=2 dTVF=-1 A IR|=2 dTVF=0 X IRI=2 dTVF=+1 X IRI=8 dTVF=0 120 100 80 Hastighet (km/h) 40 60
Däckslitage för tung lastbil i sikt/dass l, Inverkan av hastighet, IR]
0,18
9
§ 0,16E 0,14
01R1=0 dTVF=O
5,, 0112
m|R|=2 dTVF=-1
°\° 0,10
5 0,06
XIRI=2 dTVF=+1
3 0,04
XIRI=8 dTVF=O
:g 0,02
0 0,00
40
60
80
100
120
Hastighet (km/h)Figur 9.13 Däckslitage för tung lastbil i siktklass 4. Inverkan av hastighet, [R] och Wäifall/skevning.
g 0,012
2 0,01
X
x
X
E
i
o IRI=O dTVF=O
ä 01008
s 25 3 ':Im-2 dTVF-1
' " *ax I;- 0,006
-
AIRI=2 dTVF=O
g 0,004 I XIRI=2 dTVF=+1% 0,002
XIRI=8 dTVF=O
:CU o O 1 I I I I40
50
60
70
80
90
100
Hastighet (km/h)
Figur 9.14 Däckslitage för tung lastbil med släp i siktklass J. Inverkan av hastighet, [R] och tvärfall/skevning.
0,07 0,01 0,00
:2
-3 :5 0,063 0 05
0|R|=0 dTVF=O
x 53 0,04
m|R|=2 dTVF=-1
2..
=
F:
3, 0,03
AIRI 2dTV 0
3 0 02
XIRI=2 dTVF=+1
F: ,
OXIRI=8 dTVF=O
:N O 40 50 60 70 80 90 1 00 Hastighet (km/h)Figur 9.15 Däckslitage för tung lastbil med släp i siktklass 4. Inverkan av hastighet, [RI och wäifall/skevntng.
Figurema 9.10-9.15 kan kommenteras enligt följande: o inverkan av IRI på däckslitage:
- mindre ökning med Ökande hastighet
- ett linjeföringsberoende som ger mindre relativ effekt för sämre än för bättre linjeföring
- större relativa effekter för lätta än för tunga fordon - mycket liten inverkan upp till IRI = 2
0 inverkan av tvärfall/skevning på däckslitage:
- för siktklass 1 ger större skevning/tvärfall ett större däckslitage. För sikt-klass 4 är förhållandet det motsatta undantaget 50 km/h
=- den relativa effekten är betydligt större för tunga än för lätta fordon.
Inverkan av makrotextur på däckslitage redovisas i ñgurerna 9.16-9.18. g 0,02
:få
A
'GE 0,015
5:,
OTD=O.5
af:
0 0,0
1
A
,
TD-1 8
_ .
3
A
ATD=3.0
'-3 0,005
g
'
g
0
:N O O ' I I I40
60
80
100
120
v (km/h)
Figur 9.16 Däckslitage för personbil i siktklass 1. Inverkan av hastighet och makrotextur (Sandpatch).
A 0,025
5
A
% 0 02
E
'
A
E
5, O 015 OTD=O.5 o\° ' A A E]E
g 0,01E,
Q9
1:1 TD=1.8
ATD=3.0E
0
0
g 0,005
O :N O 0 I I I40
60
80
100
120
v (km/h)
Figur 9.1 7 Däckslitage för tung lastbil i sikt/dass I. Inverkan av hastighet och makrotextur (Sandpatch).
0,018 0,016 0,014 0,012 0,01 0,008 0,006 0,004 0,002 Däc ks li ta ge (V od km ld äc k)
40
50
60
70
80
90
100
v (km/h)
Figur 9.18 Däckslitage för tung lastbil med släp. Inverkan av hastighet och makrotextur (Sandpatch).
Om däckslitage söks för mikrotextur av typ GAMMAL eller NY så kan den i avsnitt 6.1.5 beskrivna modellen för avnötningskoefñcienter användas för att bilda korrektionsfaktorer. Dessa korrektionsfaktorer kan sedan multipliceras med redovisade däckslitagevärden.
Utöver bränsleförbrukning och däckslitage kan bl.a. förslitningsindex fordon, förslitningsindex gods och N10 beräknas med VETO. Hur dessa mått beräknats framgår ur (2).
Förslitningsindexet för fordon har uttryckts som funktion av de dynamiska till-skotten i däcken. För gods har förslitningsindexet relaterats till vertikala accelera-tioner i lastutrymmet.
I figur 9.19, 9.20 och 9,21' redovisas förslitningsindex för personbil, lastbil och
för släp.
1,00E-03
X8,00E-O4
0|R|=2
å 6,00E-O4
,mm
5 4,00E-O4
FHS
X
A
XlRI=8
2,00E-04
X0,00E+00
ä
1
0
,
tå
,
0
40
60
80
100
120
Hastighet (km/h)
Figur 9.19 FÖrslttningsindexför personbil.
In de x Figur 9.20 In de x Figur 9.21 VTI notat 48-2000 1,20E-04 1,00E-04 8,00E-05 6,00E-05 4,00E-05 2,00E-05 0,00E+00 4,50E-05 4,00E-05 3,50E-05 3,00E-05 2,50E-05 2,00E-05 1,50E-05 1,00E-05 5,00E-06 0,00E+00 X 40 få 50 ?A '7 I 60 70 80 Hastighet (km/h)
FÖrslitningsindexför tung lastbil.
0 . D 100 40 50 60 70 80 Hastighet (km/h) Förslitningsindexför släp. 90 100 0 IRI=2 ål IRI=4 A IRI=6 x IRI=8 o IRI=2 I IRI=4 A IRI=6 >< IRI=8 37
I figurerna 9.22 och 9.23 redovisas förslitningsindex för gods. 20,00 15,00 ä 0 IRI=2 X :i = g 10,00 . IRI 4 .E A |R|=6 5,00 X IR|=8
ä
0,00
g
,
U
1
3
40 50 60 70 80 90 100Hastighet (km/h)
Figur 9.22 Förslitningsindexför gods på tung lb.
100,00 A 80,00 0 IRI=2 å 60,00 I |R|=4 X IRI=8 20,00 X x A
0,00
I
5
,
3
40 50 60 70 80 90 100 Hastighet (km/h)Figur 9.23 FÖrslitningsindexför gods på släp.
Enligt ñgurema 922-923 skulle skadorna på transporterat gods kunna förväntas vara betydligt lägre på lastbil än på släp.
I ñgur 9.24 OCh 9.25 redovisas vägnedbrytning (N10) för tung 1b och för släp. 1,5
1,3
X
X A 9 IRI=23 1'1
ä
9
I
a IRI=4
z0,9
9 0A IRI-6
_ X IR|=8 0,7 0,5 I I I 40 50 60 70 80 90 100Hastighet (km/h)
Figur 9.24 Vägnedbrytningför tung Ib.
0,5 0,45 0,4 x 9 IRI=2 o :I =
5 0,35
X
IRI 4
X
A
A IRI=6
0 3
A
i
A
U
'
0
x IRI=8
0,25 0,2 I . . I 40 50 60 70 80 90 100Hastighet (km/h)
Figur 9.25 Vägnedbrymmgför släp. VTI notat 48-2000 3910 Reviderade samband för reparationskostnader
Reparationskostnadernas variation uttryckt med index redovisas i tabell 10.1 för den gamla och den nya kalibreringen.
Tabell 10.1 Reparationskostnader (index) som funktion av IRI. Baserad på
HDM4.
IRI Pb le 14 t le + sl
Gamla Nya Gamla Nya Gamla Nya
0 77 100 77 100 77 100 1 88 100 88 100 88 100 2 100 100 100 100 100 100 3 115 101 112 101 111 101 4 131 108 122 108 122 108 5 150 115 133 117 133 115 6 172 123 144 125 143 123 7 198 130 155 133 154 130 8 228 137 165 141 165 138 9 263 144 175 149 175 145
I bilaga 4 redovisas alla de nya parametervärdena inklusive beräknade exempel. Iden kalibrering som utförts ingår inte kostnader för smörj oljor. Om inte dessa kostnader medräknas på annat sätt följer en mindre underskattning.
11 Diskussion
Fordonskostnader utgör en del av vad som krävs för att utveckla ett komplett PMS-system. Vad som oftast ingåri begreppet fordonskostnader är följande: 0 bränsleförbrukning
däckslitage
reparationskostnader
kostnader för service och underhåll kapitalkostnader:
- för fordon
- för transporterat gods 0 administrationskostnader.
En vanlig uppdelning är dessutom i en del avseende förbrukning och förslitning samt en del avseende värdering. En sådan indelning används i VV:s EVA-modell.
Även den sk. HDM4-modellen har en sådan indelning.
Ett antal frågor behöver besvaras: 0 vilka effekter skall ingå
0 vilka förklaringsvariabler skall ingå och vilken form skall väljas på dessa 0 hur skall sambanden tas fram.
Ett rimligt kriterium för vilka effekter som skall ingå är att det skall finnas en inverkan på effekten ifråga av minst någon vägytebeskrivande variabel. Kriteriet bör kompletteras med någon undre gräns. Att bränsleförbrukning, däckslitage och reparationskostnader påverkas av åtminstone vägojämnheter är säkerställt. Huru-vida effekterna är tillräckligt stora för att beakta framgår till viss del ur avsnitt 9. Även betydelsen av olika förklaringsvariabler framgår ur avsnitt 9.
Frågan om vilken form som skall väljas på förklaringsvariabler gäller bl.a. följande:
0 vägens linjeföring där man i EVA=modellen exempelvis använder siktklass och ett annat alternativ skulle kunna vara lutning och horisontell krökning meter för
meter
0 längsgående ojämnheter och där det kanske vanligaste måttet är IRI och ett annat alternativ skulle kunna vara den exakta profilen.
Om integrerade mått som siktklass och IRI används bör ett krav vara att dessa skall ha en hög förklaringsgrad för de olika effekterna.
Det är inte säkert att [RI är det bästa måttet för att förklara hur olika fordons-kostnader påverkas av vägojämnheter, se avsnitt 6.1.3. Detta förhållande skulle kunna vara en förklaring till de stora skillnaderna mellan olika studiers resultat ifråga om bränsleförbrukning. Till saken hör dessutom att även om [RI inte är bra så finns det sannolikt många andra mått som är betydligt sämre.
Vad som också kan ha betydelse för utfallet av olika studier avseende inverkan av vägojämnheter är hur långa delsträckor som IRI medelvärdesbildas över. Ju längre sträcka desto större fel vid fordonskostnadsberäkningen. Detta följer bla. av att exempelvis komponentförslitning är proportionell mot påkänning med exponent 6. Om exponenten skulle varit :1 skulle längden på det vägblock medel-värdesbildningen avser inte ha någon betydelse.
Blocklängden har inte någon betydelse om samma våglängdsfördelning och amplituder gäller längs hela vägblocket.
De olika effekter som ingår i fordonskostnader har normalt ett starkt hastig-hetsberoende. Även om en vägmiljöbeskrivande variabel inte skulle ha någon direkt inverkan på viss effekt kan det finnas en indirekt inverkan genom hastighet.
Effektsambanden är beroende av olika fordonstyper, drivmedelstyper, ålders-fördelning, lastförhållanden m.m. Ju mera detaljerad en modell görs i detta avse-ende, under förutsättning av att effektsamband finns tillgängliga, desto högre representativitet kan förväntas. Alternativ till sådana indelningar skulle kunna vara vad som valts i EVA-modellen eller HDM4.
För att förse en fordonskostnadsmodul i ett PMS-system med de nödvändiga sam-banden f1nns bl.a. följande alternativ:
0 mätningar
0 mekanistiska beräkningsmodeller, exempelvis VETO, med en komplett beskrivning
0 mekanistiska modeller i vilka statistiska samband används där det är nödvän-digt.
Någon komplett beskrivning av fordonskostnader baserad på ett mekanistiskt angreppssätt är inte möjlig. De potentiella möjligheterna avser istället bränsleför-brukning, däckslitage och vissa delar av reparationskostnaderna.
Olika utfall av den pågående bränslestudien, relativt VETO, skulle få olika
konse-kvenser för fortsättningen:
0 liten skillnad dvs. VETO kan accepteras (A) 0 större skillnad:
- VETO kan revideras avseende dynamiska tillskott (B)
- föregående punkt inte framkomlig och det uppmätta sambandet stämmer med HDM4 (C)
- det uppmätta sambandet stämmer inte heller med HDM4 (D).
A, allt OK. Behov finns också av ytterligare valideringsmätningar med andra for-donstyper.
B, den fordonsdynamiska delen av VETO revideras.,
C, implementera HDM:s rullmotståndsfunktion i VETO alternativt använda HDM4 direkt.
D, behov av bränslemätningar för alla fordonstyper i samtliga miljöer.
Effektsambanden behöver fortlöpande ajourhållas och förbättras. Som ett led i ett sådant arbete skulle följande kunna genomföras:
0 att den i VETO ingående mekanistiska modellen för beskrivning av fordons-slitage slutkalibreras
0 att mätningar av acceleration och komponentslitning genomförs enligt lämnat projektförslag
0 att mätning av påkänningar genomförs enligt lämnat projektförslag
0 att nya mätningar av däckslitage genomförs där inverkan av textur, ojämnheter och temperatur studeras parallellt
0 att VETO revideras, efter behov, mot bakgrund av erhållna valideringsresultat
om detta bedöms vara meningsfullt _
0 att utvärdering genomförs av om IRI är ett lämpligt mått för att kunna beskriva inverkan av ojämnheter på fordonskostnader
0 att möjligheten utreds av att direkt använda en mekanistisk modell istället för tabellverk (som i KAN/EVA)
0 att den slutliga dokumentationen för HDM4 gås igenom.
Kalibrering av VETO:s förslitningsfunktion, vilken baseras på (Magnusson, 1986), kan göras om genomsnittlig livslängd för olika komponenter eller kompo-nentgrupper är kända. Ett förslag till en sådan kalibrering redovisas i (Magnusson,
1986). Utöver uppgifter om livslängd krävs följande: 0 en indelning av vägnätet i olika vägtyper och [RI-klasser 0 uppgifter om trafikarbete per fordonstyp i varje sådan klass.
Livslängder för olika komponentgrupper kan för personbilar bestämmas ur Bilunderhåll. Även om metoden inte är helt bra skulle den kunna förväntas ge en betydande förbättring jämfört med befintliga HDM-samband. Vad som enkelt kan skattas ur Bilunderhåll är parametern KP i uttrycket för komponentförslitning, se bilaga 4.
Parallella mätningar av aeeelerationer och uppföljning av utbyte av fordons-komponenter ger en mycket exakt kalibrering. Problemet är kanske främst att för-söket behöver vara mycket långvarigt.
Diskussioner om nya forskningsinsatser inom fordonskostnadsområdet har på-gått under lång tid.
12
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
44Referenslista
Sävenhed, H. Samband mellan vägyta och bränsleförbrukning. Jäm-förelse mellan ytbehandling och massabeläggning. VTI rapport 246. Statens väg- och trañkinstitut, Linköping. 1983. .
Hammarström, U och Karlsson, B. VETO - ett datorprogram för beräk-ning av transportkostnader som funktion av vägstandard. VTI med-delande 501. Statens väg- och trañkinstitut. Linköping. 1987.
International Study of Highway Development and Management (ISOHDM). Supplementary Technical Relationship (STR) Study. Addendum to Draft Final Report 1995. Swedish National Road Administration Road & Traffic Management Division. 1996.
Hammarström, U. Fordonskostnader i PMS- diskussionsunderlag. PM 1999-09-17. Statens Väg- och transportforskningsinstitut. Linköping. 1999. EVA - Effektberäkning vid VägAnalyser. Version 1.1. Vägverket. Bor-länge. 1993.
PMS Pavement Management System. Användarmanual. Vägverket. Borlänge, 19%.
MODELLING ROAD USER EFFECTS IN HDM-4. RETA 5549-REG Highway Development and Management Research. Final Report. International Study of Highway Development and Management Tools. N.D. Lea International Ltd 1995.
Magnusson, G., Kan jämnhetsstandarden hos det svenska vägnätet förorsaka fordonsskador och onödigt fordonsslitage? VTI notat 21-1998. Statens väg- och transportforskningsinstitut. Linköping. 1998.
Magnusson, G. Sambandet vägojämnhetm- fordonsslitage. En litteratur-studie. VTI meddelande 500. Statens Väg- och trafikinstitut. Linköping. 1986,
Hammarström, U och Karlsson, B. Fordonskostnader och avgasemis-sioner för vägplanering (EVA). VTI notat T150. Statens väg- och trans-portforskningsinstitut. Linköping. 1994.
Hammarström, U. och Henriksson, P. Reparationskostnader för bilar. Kalibrering av Världsbankens HDM-III-samband för svenska förhål-landen, Statens väg och transportforskningsinstitut. Linköping. 1994.
Berglund, C.-M. Modelling Road User Effects in HDM-4. Synpunkter på HDM-4 Technical Reference Manual Version HDM-4 V1.0E. PM
1999-12-21. Statens väg- och transportforskningsinstitut. Linköping. 1999.
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
VTI notat 48-2000Olsson, E. Inverkan på ett fordons rullmotstånd av vägens textur, ojämnhet och tvärfall. En litteraturstudie. VTI meddelande 494. Statens väg- och trañkinstitut. Linköping. 1986.
Hammarström, U. Mätning och simulering av bilavgaser - körning med och utan husvagn i laboratorium och på väg. VTI meddelande 856. Statens väg- och transportforskningsinstitut. Linköping. 1999.
Bilunderhåll, attityder - beteenden - problem - kostnader. 1995/9652. Konsumentverket. Vällingby. 1996.
Sandberg, U. Jämförelse av tre olika skalor för beskrivning av en vägytas makrotextur. PM 1982-12-02. Statens väg- och trañkinstitut. Linköping. 1982.
Hammarström, U och Karlsson B. 0. EMV - ett PC-program för beräk-ning av vägtrañkens avgasemissioner. Programbeskrivberäk-ning och användarhandledning. VTI meddelande 849. Statens väg- och transport-forskningsinstitut. Linköping. 1998.
Backman, C., Slitage av bildäck på olika vägytor - en jämförelse mellan körningar på en ytbehandling och på en asfaltbetong. VTI meddelande 130. Statens väg- och trañkinstitut. Linköping. 1978.
Kihlgren, B. Slitage av bildäck vid körning på äldre ytbehandling och asfaltbetong. VTI meddelande 236. Statens väg- och trañkinstitut. Linköping. 1980.
Ohlsson, E. Däckslitage på asfaltbetong och ytbehandling i Nestes provvägsmaskin. Statens väg- och trañkinstitut. Linköping. 1985.
Ohlsson, E. Däckslitagemätningar inom VETO-projektet. Utförda på Jylland 1985. VTI meddelande 481. Statens väg- och trañkinstitut. Linköping. 1986.
45
Bilagal
Sid°1(5)
Rullmotstånd som funktion av hastighet, Tdsp och
IRI
Följande beräkningsparametrar har använts utöver vad som anges i tabell 4.1 i huvudtexten:
Parametrar Personbil Tung lastbil Tung lastbil Buss
med släp
Massa (kg) 1 423 17 975 36 500 13 150
Antal hjul 4 10 22 6
Diameter (m) 0,612 1,09 1,09 1119
I de följande tabellerna redovisas rullmotstånd (N) som funktion av fordonstyp, hastighet, makrotextur (Tdsp) och ojämnheter (IRI).
![Figur 9.] Bränsleförbrukningför personbil och sikt/dass 1. Inverkan av has- has-tighet, [R] och Wälfall/skevning.](https://thumb-eu.123doks.com/thumbv2/5dokorg/4767878.127118/28.892.158.707.373.619/figur-bränsleförbrukningför-personbil-sikt-inverkan-tighet-wälfall-skevning.webp)
![Figur 9.3 Bränsleförbrukning för tung lastbil i sikiklass 1. Inverkan av has- has-tighet, [R] och ivärfall/skevning.](https://thumb-eu.123doks.com/thumbv2/5dokorg/4767878.127118/29.892.170.762.139.387/figur-bränsleförbrukning-lastbil-sikiklass-inverkan-tighet-ivärfall-skevning.webp)
![Figur 9.5 Bränsleförbrukning för tung lastbil med släp i siktklass I. Inverkan av hastighet, [R] och tvärfall/skevning.](https://thumb-eu.123doks.com/thumbv2/5dokorg/4767878.127118/30.892.176.755.137.382/figur-bränsleförbrukning-lastbil-siktklass-inverkan-hastighet-tvärfall-skevning.webp)
![Figur 9.10 Däckslitage för personbil i siktklass 1. .lnverkan av hastighet, IR]](https://thumb-eu.123doks.com/thumbv2/5dokorg/4767878.127118/32.892.171.759.598.828/figur-däckslitage-personbil-siktklass-lnverkan-hastighet-ir.webp)