»
Simulering av fjädringssystemet
'52
__ på friktionsmätvagn BV 11
Simulering av fjädringssysternet
52
på friktionsmätvagn BV 11
h b åh b wwwww , b U1 U1 U 1 N N N N N b b l e -J d åm e U ' I U ' I U ' I U T U ' T U W k O O O \ I O \ U ' l J > -U ) t \ ) |' -' 4 b L» M +4 ABSTRACT BAKGRUND Inledning FRIKTION I VÄGSAMMANHANG Allmänt Grundläggande friktionsteori Luftgummihjulets friktionsmeaknism
RullmotStånd
BESKRIVNING AV FRIKTIONSMÄTVAGN BVll Inledning Huvuddata IMekanisk uppbyggnad och funktion
Mätutrustning MATEMATISK MODELL
Förenklingar i modellen
Grunddragen i den matematiska modellen Rörelseekvationerna
Numerisk lösning av systemets differential-ekvationer
Rörelseekvationer för "strippad" modell SIMULERINGSPROGRAM FÖR BVll
Huvudprogram
Beräkningsgången i subrutinen RUNGE
Subrutinerna EHMAT, MATMP, MINV
Subrutin PLO4KV Subrutin BINGO Subrutin EVERT
Inläsning av aktuell vägprofil Användning av programmet
Användning av det "strippade" programmet
VTI MEDDELANDE 52 H . k O \ l U '|b J > 11 11 13 14 16 17 17 19 19 26 30 39 39 39 39 40 40 40 40 41 42
MÄTRESULTAT
Allmänt
Normalkraftens inverkan på friktionstalet Normalkraftens inverkan på mäthjulsspin Däckradiens inverkan på mätresultatet
.EXEMPEL PÅ UTSKRIFT AV KURVOR OCH DATA FRÅN
SIMULERINGSPROGRAMMETREFERENSER BILAGA A
BESTÄMNING AV VAGNENS MASSOR, TYNGDPUNKTSAVSTÅND OCH TRÖGHETSMOMENT
Vagnens massor och tyngdpunktsavstånd
Vagnens tröghetsmoment
BILAGA B
FRAMTAGNING AV FJÄDER- OCH DÄMPKONSTANTER
Fjäder mellan mätarm och belastningsarm
Fjäder mellan bärarm och ramverk Däckens fjäder- och dämpkonstanter Stötdämparnas dämpkonstanter
BILAGA C
BERÄKNING AV NORMALKRAFTENS VARIATION
Ursprunglig modell "Strippad" modell VTI MEDDELANDE 52 59
60
60
61 66U U U U U U m Ln A Lu M m m m m b LU N +4 Allmänt Ramen 4 Bärarm Mätarm Belastningsarm Strippad modell BILAGA E PROGRAM FÖR SIMULERING AV BVll
Huvudprogram
'
Huvudprogram "strippad" modell Modifiering av Vägprofil
Subrutiner
Statens väge och trafikinstitut (VTI) Fack
581 01 LINKÖPING
REFERAT
I denna rapport beskrivs den matematiska uppbyggnadeng
av modellen till friktionsmätvagnen BVll, samt
dator-program för simulering rörande fjädrings- och dämpnings-egenskapernas inVerkan på mäthjulsbelastning och på I fjädringsrörelserna hos ram och belastningsvikt.
Modelluppbyggnaden och programmet har utvecklats vid
Statens väg- och trafikinstitut (VTI), som ett examens-arbete i ämnet konstruktionsteknik under våren 1977.
Målsättningen har varit att utveckla en matematisk _ modell som är så väl anpassad till den verkliga vagnen
som möjligt. Det är också önskvärt att programmet är
lätt att implementera i datorer av tillräcklig storlek. Den matematiska modellen beskriver dynamiken hos ett
an-tal kopplade svängarmar. Varje sådan arm har frihet att
rotera runt en fix axel i vertikalplanet vinkelrätt färdriktningen. Rörelseekvationer för varje arm ger to-talt 4 ekvationer. De fyra rörelseekvationerna bildar ett system av andra ordningens differentialekvationer med lika antal ekvationer som obekanta. Detta ekvations-system löses numeriskt med hjälp av dator.
Programmet är helt digitalt och skrivet i FORTRAN IV.
Simuleringsresultaten ritas upp på en bildskärm.
National Swedish Road and Traffic ResearCh Institute
Fack i
8-581 01 LINKÖPING SWEDENJ
ABSTRACT
This report describes the mathematical modelling of the friction measuring vehicle BVll and the Computer
program for the simulation of the effect of the suspen-sion and damping pr0perties on the measuring wheel load and on the suspension movements of the frame and
loading weight.The model design and the computer program were developed at the National Swedish Road and Traffic Research Institute as a thesis in construc-tion technology during the spring 1977.
The aim of the study was to develop a mathematical model as well adjusted to the vehicle as possible. It is also desirable that the computer program can easily be implemented in computers of sufficient size. The mathematical model describes the dynamics of a
number of coupted swinging arms.Each arm has freedom to rotate around a fixed axis in the vertical plane per-pendicular to the moving direction of the vehicle. Equations of motion for each arm give 4 equations. The four equations of motion form a system of differen tial equations of the second order,where.the number of equations is equal to the number of unknown.This equation system is numerically solved by means of computer
The computer program is completely digital and written in the FORTRAN IV language.
The result from the simulation are plotted on a monitor. VTI MEDDELANDE 52
och trafikinstitut) utvecklades under senare delen av
1960-talet en lätt trehjulig friktionsmätvagn avsedd
att bogseras av en personbil och som fått beteckningen BV ll.
ändamålet med vagnen var att mäta friktionen på
rull-banor på flygfält, men man planerade äVen att i en framtid kunna använda den till friktionsmätning på väg.
I samband med det senare användningsområdet försågs
vagnen med en styvare fjädring. Under 1976 har en i mäthänseende kompletterad men i övrigt oförändrad BVll använts för friktionsmätning. Man observerade under mätningar på ojämn väg att vagnen dynamiskt sett
upp-förde sig otillfredsställande. Detta har lett fram
till ett önskemål att få vissa frågor i samband härmed bättre belysta.
Inledning
Arbetet med simulering av dynamiska system består i allmänhet av två faser. Första steget är att konstrue-ra en matematisk modell och ange de ekvationer, som bestämmer dennas dynamik. Modellen måste vara tillräck-ligt komplicerad för att ge relevant information och tillräckligt enkel för att lösningen av ekvationerna skall vara praktiskt utförbar.
gande programmeringsarbetet. Föreliggande rapport är en beskrivning av ett program för digital simulering i da-tor av de vertikala svängningar på friktionsmätvagnen
BV ll. Programmet har utvecklats vid VTI som
examens-arbete under våren l977. Programmet är skrivet i FORTRAN IV och körd i en dator av typ EAI PACER 600.
.För närvarande finns två program utvecklade. Dels ett program där hänsyn tas till däckens fjäder- och dämp-konstanter, samt ett program där dessa försummas. Det-ta för att undvika höga frekvenser i systemet. Man kan då öka tidssteget vid lösandet av
differentialekvatio-nerna och därmed få ner körtiderna på datorn.
I de följande avsnitten kommer programmet att presente-ras mera ingående, men kort kan sägas att programmet
tillåter insignaler på kOpplingsdon, bärhjul och mäthjul.
Modellen tillåter tipprörelse för ram, bärarm, mätarm och belastningsarm, medan däremot krängrörelse ej är
införd.
Framställningen i denna rapport är ej en färdig
utred-ningen utan skall ses som ett verktyg eller ett
hjälp-'medel för framtida studier av BV llzs svängningsrörel-sers betydelse för mätresultatet vid friktions- och jämnhetsmätning.
'nu-una
I kapitel 2 redogörs för friktion i vägsammanhang, då
denna teori avsevärt skiljer sig från den klassiska friktionsteorin. Kapitlet är till stora delar ett sammandrag av en tidigare publicerad rapport inom
institutet, se referens nr 2. Kapitel 3 är en beskriv-ning av friktionsmätvagnen BVll med avseende på meka-nisk uppbyggnad och funktion. Även detta kapitel är
2
riska lösningsmetod som använts vid lösandet av rörel-seekvationerna. Kapitel 5 behandlar simuleringsprogram-men. En beskrivning ges av beräkningsgången i de olika programmen, samt hur man använder dem.
Därefter i kapitel 6 diskuteras olika faktorer som kan
inverka på friktionsmätvagnens mätresultat.
Slutligen i kapitel 7 ges exempel på utskrift av
kur-vor och data från programmet.
Slutligen vill författarna rikta ett varmt tack till handledaren Evert Ohlsson för allt stöd och åtskilliga stimulerande och klargörande diskussioner under utarbe-tandet av denna rapport
Staffan Nordmark, för synpunkter vid uppställande av den matematiska modellen och därtill hörande ekvatio-ner
Håkan Jansson för all hjälp i programmeringsarbetet.
Friktion kan sägas bestå dels av "yttre friktion" och
"inre friktion". Yttre friktion äger rum_i ytan på en
kropp. Det är denna friktion vi vardagligt talar om., Inre friktion äger däremot rum inne i materialet i en krOpp;
Ett bildäck av syntetiskt gummi har både elastiska (fjädrande) och viskösa (dämpande) egenskaper, man säger att gummit är viskoelastiSkt. Den fysikaliska modell man kan ställa upp för gummi och gummiliknande material får i sin mest renodlade form utseendet enl
fig 2.1.
f F
h
Fig 2.l Fysikalisk modell för ett gummimaterial.
Om en periodisk sinusrörelse påverkar gummi, uppträder en fasförskjutning mellan fjäderns och dämparens mot* stånd. Detta medför att systemets (gummits) styvhet inte är en enkel summa av komponenternas motstånd. För visko-elastiska material har man därför tagit till begreppen
"komplex elasticitetsmodul", "komplex skjuvmodul". Där modulerna uttrycks i komplexa tal med den reella delen svarande mot den elastiska fjädringen och den imaginära delen svarande mot den Viskösa dämpningen. T ex kan gummits elasticitetsmodul anges som E = 40+-i 40 N/mm
Friktionskraften mellan två, mot varandra glidande ytor
sammansätts av två huvudkomponenter a) adhesionskomponenten
b) hystereskomponenten
êébêêlQB§EQEPQQ§BE§E
När två material bringas i kontakt med varandra, upp-träder bindningar mellan molekylerna i gränsytorna. Den
resulterande kraften i horisontell led från de
moleky-lära bindningarna utgör friktionens adhesionskomponent. Belastningen är av betydelse i den mån den påverkar ' antalet bindningar, dvs ändrar den verkliga
kontakt-ytan. Teoretiskt skulle således mycket stora tangentiella adhesionskrafter kunna uppnås i kontakten mellan mjukt gummi och en mycket slät, torr yta t ex glas. Detta har styrkts experimentellt. Närvaro av mycket tunna skikt
föroreningar eller vatten i kontaktytan förhindrar i
proportion till skiktets utbredning uppkomsten av mole-kylära bindningar.
Adhesionskomponenten ökar med ökande glidhastighet mot
ett maximum vid några få cm/s och avtar sedan. Se fig
2.2. Detta beror på att gummit får en ökad energiför-lust till en viss temperatur och avtar sedan.
*51,0
/
\\
:i: /
/
\
\
0.2
0,01 0,1 0,5 1 5 10 50glidhcstighet m/s
Fig 2.2 Adhesionens beroende av glidhastigheten
stel upphöjning av något slag draperar sig kring upp-höjningen och ger upphov till en symmetrisk tryckför-delning, fig 2.3 a.
Upphöküng
Fig 2.3a Fig 2.3b
Scnematisk framställning av hysteresmekanismen
Om gummiföremålet förflyttas i sidled under samma last förblir inte tryckfördelningen längre symmetrisk. Vid rörelse, som i fig 2.3 b, är gummit på upphöjningens vänstra sida under tilltagande deformation medan det på upphöjningens högra sida befinner sig under avtag-ande deformation. På grund av gummits viskoelasticitet är deformationen-förenad med energiförluster. Den kraft som fås tillbaka vid gummits returfjädring är således
mindre än den som krävdes för deformationen. Den
osym-metriska tryckfördelningen blir som fig 2.3 b visar. Man ser att man får en horisontell komposant motriktad
rörelsen, förutom den vertikala komposanten
(belast-ningen).
Vid låg och måttlig hastignet är hystereskomponenten relativt oberoende av glidhastigneten. Se fig 2.4. Vid torr friktion är adhesionskomoonenten dominerande, medan hystereskomponenten kan vara dominerande vid våt
friktion.
fO ? f b
f'
,
FR
lC
Tl
ON
CO
EF
F.
-2 -a 0 I 2IO
IO
no
IO
, IO
summa SPEED,V, mph
Fig 2.4 Adnesions- resp hystereskomoonentens beroende
av glidhastigheten.
där fa = adhesionskomponentens friktionstal
fh = hystereskomponentens friktionstal
f = f + f
Luftgummihjulets friktionsmekanism
Friktionskrafter mellan gummihjul och vägbanan kan uppträda endast i samband med en relativrörelse (glid-ning) mellan dem. Gummi saknar nämligen praktiskt
taget helt s k statisk friktion i den klassiska frik-tionsteorins mening. Vidare är friktionskraften kvan-titativt beroende av glidhastigheten och har ett maxi-mum vid O,l-l m/s för att sedan avta med ökande
glid-hastighet.
hjulets varvtal. Eftersom hjulets periferi är elastisk och kontaktytan ständigtväxlar utefter omkretsen, måste varje element förspännas tangentiellt för att kunna överföra krafter. Denna fortlöpande förspänning och avlastning av omkretsen medför att den verkliga periferihastigheten i kontaktytan under kraftöverför-ing skiljer sig från vad som beräknas ur t ex varvtal och rullningsradie. I kontaktytan mellan ett fritt
rullande hjul och en vägbana förekommer ingen betydande
relativ rörelse, men en sådan uppstår i enighet med
vad som nyss nämnts-så snart hjulbromsen ansätts eller hjulet drives. För att bekvämt karakterisera rörelsen dimensionslöst divideras skenbara relativ-hastigheten med körrelativ-hastigheten. Den erhållna storheten benämns slip vid bromsning och spin vid drivning. Slip-värdet kan tydligen variera mellan 0 vid fritt rullande hjul och 1 (l00%) vid låst hjul då relativhastigheten
är lika med körhastigheten.
Friktionstalet, dvs kvoten mellan friktionskraft och normalkraft, varierar med körhastighet och slip. Vid normala kombinationer av körhastigheter och däck ligger friktionstalets maximum vid lO-20% slip. Se fig 2.5.
F r i k t
20
30
SPEED, v, mph
_+-Fig 2.5 40 50 50 ?0Friktionstaiets beroende av körnastighet v
och Slip.
Rullmotstånd
Vid ett rullande gummihjul sker en kontinuerlig
defor-mation av hjulet.
enl fig 2.6.
Detta karakteriseras av måttet f,
r
P A 'C
WL
f \\\\s_ :#_ø////
Fig 2.6
VTI MEDDELANDE 52
Framför normalen till vägbanan genom axelcentrum,
räk-nat i rullningSriktningen, trycks ringen samman och bakom normalen fjädrar ringen successivt tillbaka till sin ursprungliga form. Hysteresförluster i ringen med-för att de med-för sammantryckningen erforderliga krafterna ej helt återvinns vid returfjädringen. Vägbanans
resul-terande vertikala reaktionskraft (P), mot det rullande
hjulet, blir härigenom förskjuten i rörelsens riktning, enl fig 2.6. Vägbanans reaktionskraft ger om hjulcentrum
ett moment P- e, som även vid frånvaro av andra motstånd
måste övervinnas för att rullningen skall fortgå. Detta kan bara ske om en friktionskraft i vägbanan (WR, egent-liga rullmotståndet) ger erforderlig motriktat moment
WR. C, se fig 2.6, om hjulcentrum.
Påverkas hjulet av en sidkraft uppstår en motriktad
friktionskraft, som dividerad med hjulbelastningen de-finierar ett "sidfriktionstal" vinkelrätt riktad fram-föringsriktningen. Sambandet mellan maximal utnyttjad sidfriktion och maximal utnyttjad broms- resp
drivfrik-tion kan uttryckas med den s k frikdrivfrik-tionsellipsen. Se
fig 2.7.
åiDFRHâYÖNSKOEFFlüENT 5
"e VFWKUONSTAL ;D
0
BROMSFRlKUONSTAL ?B
Pig QLZ Friktionsellipsen.
BESKRIVNING AV FRIKTIONSMÄTVAGN BV 11:3
'lnledning
BV llz3 är en trehjulig friktionsmätvagn för kontinu-erlig registrering av en beläggningsytas friktion och avsedd att dras av personbil; Se fig 3:1.
*2 2: 13 "' 11 Friktionsmörvagn BV 1 I :3
.. .1
å
?ä
' . '-1Flg 3.1
i __
' ' 3: ' 'f° i :De tre hjulen.är lagrade i bakre änden av lika
långa svängarmar. Dessa är lagrade på en gemensam, med
hjulaxlarna parallell axel, som i sin tur är lagrad i
fordonsramens framände. Med denna axel är de tre hju-len sammankopplade Via rullkedjor med en utväxling vald så, att det mittre hjulet, som är mäthjul, under körning roterar långsammare än ytterhjulen och sålunda bromsas.
Det härav resulterande bromsmomentet upptas av ett mätnav, vid vilket mäthjulet är monterat. Mätsignalen
samt en "hastighetssignal" från en tachometergenerator, driven av kedjan i mäthjulets svängarm, överförs via
kabel till dragbilens förarhytt och registreras där av en skrivare.
Den aktuella friktionskoefficienten kan direkt avläsas på skrivarens graderade registreringsremsa. Frammatad remslängd är proPortionell mot av fordonet tillrygga-lagd Vägsträcka och oberoende av hastigheten.
Elektrisk energi till mätutrustningen erhålls från
dragbilens.batteri och registreringsförlOppet startas
med kontrollorgan på mätutrustningen.
3.2 Huvuddata ; 1 "11 3
Totalvikt 360 kg Största längd 2,30 m Största bredd 1,87 m Höjd 0,50 m Höjd inklusive pejlrör 1,30 m Vertikal dragkroksbelastning 400 N Ytterhjulsbelastning 2 x 1100 N Mäthjulsbelastning 1000 N Lufttryck i ytterhjul 170 kPa Lufttryck i mäthjul 140 kPa
Däck 4.00-8/4 Fabrikat:Trelleborg. Mönster T 49
Mäthjulets slip ca l7.%
Mäthastighet: 20-100 km/h, normalt 70 km/h
'Mekanisk uppbyggnad och funktion
De tVå ytterhjulen och det mellan dessa placerade mät-hjulet är lagrade i var sin svängarm. Dessa tre lika långa armar är i sin främre ände lagrade på en gemen-sam axel - huvudaxeln - vilken i sin tur är lagrad i två stållagerhus fästade vid främre tvärbalken i
for-donets ram.
De bägge yttre svängarmarna uppbär i sina bakändar via_
tryckfjädrar och teleskopstötdämpare fordonets ram. I den främre tvärbalken är en ställbar dragstång
monte-rad. Denna är försedd med utbytbara kOpplingsdon. Den mittre svängarmen med mäthjulet belastas separat av en gaffelformad belastningsarm via tryckfjädrar och teleskopstötdämpare i svängarmens bakre ände.
Belast-ningsarmen är lagrad i rullningslager, monterade på
främre änden av svängarmen. Inuti svängarmarna löper 2 st 1/2" rullkedjor samt 1 st 5/8" rullkedja över
kedjehjul, låsta med kilförband och stOppskruv vid
hjul-aXlarna och huvudaxeln. De tre kedjehjulen på huvud*
axeln och det på mäthjulsaxeln har 23 tänder, kedje-hjulen på ytterhjulsaxlarna har däremot 19 tänder. Mäthjulet får härvid lägre periferihastighet än
ytter-hjulen och bromsas kontinuerligt med ett "slip" av ca 17%.
Då den sammanlagda belastningen på ytterhjulen är mer än dubbelt så stor som mäthjulets, kommer ytterhjulens
rotationshastighet att påverkas endast obetydligt; Vid
bromsning på detta sätt återförs ungefär 83 % av
frik-tionskraften på mäthjulet till ytterhjulen, där den medverkar till framdrivning. Se fig 3:1.
DRIVKRAFT B <;;_: BÄR? .
"_'I - ;HJUL.IBROMSKRAFTl .
;ROMS-jL---J
HJUL *- - -JF'
KRAFT P
I ÖGLA C© *m* HJUL DRIVKRAFT(_B 6"" BÄR' ) Utväxling bromshjul/bärhjul z==0,83Det nominella slipet blir då S'wl-Z==l-O,83==O,l7
Genom utväxling gäller också
i
att 2BWJZ°F==O,83FKraftjämvikt för ekipaget ger_den i öglan erforderliga
dragkraften D = F -'I2B"\: F - 0,83F = 0,17F
Fig 3.2 Systemfunktion
Bromskraften på mäthjulet upptas av mätnavet och orsa-kar en elastisk förvridning av denna. Förvridningen om-vandlas till en axiell rörelse, vilken utnyttjas till att förskjuta en järnkärna i en mätspole. Under kör-ning roterar den axiellt förskjutbara järnkärnan inuti den stillastående mätspolen. Förskjutningen av
järn-kärnan är direkt prOportionell mot bromskraften på
mäthjulet.Utsignalen till mätutrustningen representerar
då det aktuella friktionstalet under förutsättning att mäthjulsbelastningen är konstant.
På högra svängarmens insida är monterad en tachometer-generator,.som drivs av rullkedjan inuti armen. Gene-ratorns rotationshastighet är ca 1,8 ggr ytterhjulens.
Dess uppgift är att leverera en hastighetsprOportio-nell spänning för drift av skrivarens
registrerings-remsa .
Mätutrustning
Mätutrustningen består av en skrivare, fabrikat Mini-gor RE 501 och en stabilisator - och kontrolldel, hop-byggda till en enhet. Till skrivaren är ansluten en tachometergenerator, fabrikat Servo-Tek Prod USA SA-740B-l, som levererar en hastighetsprOportionell
spänning för drift av skrivarens pappersmatning. Även momentmätnavets lägesgivare, fabrikat Bofors, RLL-2 är ansluten till skrivaren och levererar en signal
pro-portionell mot friktionskraften. Se fig 3:3.
tachometer Friktions-tal skrivare 4=? +- Xmomentmät-nav
Fig 3.3 Blockschema över mätutrustning
MATEMATISK MODELL
Förenklingar i modellen
Däckkontakten sker 1 punkter som sammanfaller med en Vertikal linje gående genom axelcentrum.
Sambandet mellan dämpkraft och hastighet anses .linjära.
Sambandet mellan fjäderkraft och hoptryckning anses linjära.
Plan rörelse, dvs krängning av vagnen kan ej ske.
"Vid beräkning av tröghetsmoment med avseende på sväng-armarna har deras utbredning tvärs längsriktningen försummats.
Modellen gäller endast för positiva normalkrafter. Modellen gäller endast vid måttliga svängningar då approximation av små vinklar införts..
De två bärarmarna är sammanslagna till en bärarm. ' Belastningsarmens rotationsaxel sammanfaller med
mät-armens .
Se figur 4.1 och 4.2.
Al N 9) N \ : \ \ \ \ \\ \ \ \ \ \ \ ÅÖC \ \ \ \
Figur 4.1 Modell av vagñens ram (1) och bärarm (2)
d3
4
a3
E
1
/ 9/
.
/
1;_
I;
J
mz'Iz
C2'K2
\\ \ \\ \ x 3 \ \ \ L E X ? 0 O O. : M \ i \ \ \ \ \ \ ; \ . N O 1 DJ N 7 T N N/
Figur 4.2 Modell av vagnens belastningsarm (1) och mät-arm (2)
Grunddragen i den matematiska modellen
Den matematiska modellen beskriver dynamiken hos ett
antal kOpplade svängarmar. Varje sådan arm har frihet
att rotera runt en fix axel i vertikalplanet. Framställ-ningen begränsas i fortsättFramställ-ningen till en fyrarmad vagn. Denna har således 1 + 1 + 1 + 1 = 4 frihetsgrader.
Rörelseekvationer för varje arm ger totalt 4 ekvationer
0, 61, 92, 63. Dessa variabler
anger rotationen för Varje arm. med följande obekanta 6
De fyra rörelseekvationerna bildar ett system av andra ordningens differentialekvationer med lika antal ekva-tioner som obekanta. Det är värt att notera att syste-met av differentialekvationer är linjära med konstanta koefficienter ty approximationer av små vinklar har gjorts.
Rörelseekvationerna
Vid uppställande av rörelseekvationerna finns det ett flertal alternativa vägar. Vi nöjer oss här med att
diskutera två av dessa.
A. Svängarmarna snittas upp i sina knutpunkter. Upp-ställning av impulsmomentlagen för varje enskild arm. Efter elimination av snittkrafterna fås då rörelseekvationerna för systemet.
B. Att med utgångspunkt från Lagrange's ekvation
teckna den totala energin för systemet. Insättning och derivering ger då rörelseekvationerna för syste-met.
Alternativ A ger omfattande beräkningar då snittkrafterna
måste elimineras ur ekvationerna. Valet föll därför på alternativ B.
§ê9§ê99§l§_ekyê§ieg
Ekvationen får i detta fall följande utseende:
d aTe aTe BV_ 8R
-är "aq ' _"a +_a *T :'0
i
qi
qi
qi
'
(M)
där: Te = Systemets totala kinetiska energi
V = systemets totala potentionella energi R = systemets dissipativa energi
qi = generaliserad koordinat
qi = tidsderiverad generaliserad koordinat
Eigeziêäê_s2s§9$9
Te z % I0 éå + % m0 (aoéo + 20)2 +
% Il Di + % ml (al 91 + 20 90 + 20)2 +% Iz éå + % m2 (az 62 + 0 90 + 20)2 +
% 13 Öå + % m3 (a3 ÖB + 10 90 + å0)2
(4.2)
VTI MEDDELANDE 52EQE?EEŧllê-§E§EQlE
_i
2
_
2 i
_
2
V--2 ko dO (90 61) +-2 kl (20+-20 90+-dl 61 21) +1
>
2 4
2
2
-2-k2 (20+20 90+d202-22) +-2-k3 (13 (93-62)
(4.3)Qiêêiêêäiyê_s2eägia
__1_
2
_. 2 i_
.
-
-_.
2
R--2 Cod0 (90 61) 4-2 Cl (204-20 60+-dl el 21) +1
.
-
-
. 2
2
-
-
2
'äcz (20+20 G)0+dz 32'22) + C3 d3 (93'92)
(4.4) Dessa uttryck sätts in i Lagrunge's ekvation och deri-veras m.a.p. generliserade koordinaterna Gi, i==0,3.Därvid erhålles först ramens rörelseekvation 2 '2 .
[ioá-mo aoi-(ml4-m24-m3) 20] 90'*
2
0 1 al 91440 m2 az e2+510 m3 a3 63+
m2 2 ° 2
-[DO dO+-(Cl+fC2) lá]90+-[TCO.dO+-Cl 20 dl]91-+ \
Å
' 2 2
+C2 20 (12 v 62+ [ko dO+ (kl+k2) ZO]GO+
2
[-ko d0+kl 20 dl] Ol+k2 20 az 92+
+ Eno aO+-20 (mlá-mzi-m3) zO-+ 2 å +-(K +-K
(C
1_+C
2,)0012)00
Bärarmens rörelseekvation .. 2 ..
ml al 20 90 [il4-ml al] Ol-+
2
-
'
2
2'-[-CO dO+cl dl 20] 90+ [CO.dO+Cl dl_ 91+
-k d2+k d SL
0 0
1
1
0
9 + k d2+k dj 9 +
0
0
0
1
14
1'
ml al zO+Cl dl zo+kl l zO--Cl dl
zl-Mätarmens rörelseekvation
m2 az .20 90+ [12+m2 az] e2+Cz dz 20 G0
c d2+C
2 2
3 3
d2
6) -c d2é+k
2
3 3 3
2
d
2 0 0
2
0+
a2 .Oä + 2 2 2 [F2 d2+k3 då] 92-k3 d3 G34-m2 C2 d2 ZO--C2 d2 22+-k2 d2 ZO-k2 d2 22==0 (4.7)samt belastningsarmens rörelseekvation
" 2 H 2 . m3 a3 20 90+-[I34-m3 aå] 63-C3 d3 62-+
2
C3 (33
93'k3C3392+k3d393+m3 31320"O
.
2
2
.. _
3
(4'8)
Dessa kopplade differentialekvationer med konstanta
koefficienter kan skrivas:
?0
?0
90
2
9
9
e
ä
A Öl
-FB 61
4-0 91
+-D ä
+
"2
'.2
2
93 93 63 Z 20 E 2 +-F zl ==O (4 9)22
22
där A, B, C är 4 <4 matriser och D, E, F är 4 <3 matriser.De ingående elementen i matriserna får följande
ut-seende:
2
I0+m0 a0+(m1+m2+m3 0' 20 ml al' 20 m2 az' 0 m3
2 20 ml al , Il+ml al, O , 0 A: 2 20 m2 a2 , O , 12+m2 az, O Q0 m3 a3 , 0 , O , 13+m3 VTI MEDDELANDE 52
d02+(Cl+C2) 202
-CO d02+cl 20 dl
, c2 20 dz
, 0
d02+Cl dl 20
, cO d02+cl dl2
, 0
, 0
d2 20
, 0
, c2 d22+C3 d32 , -c3 d32
, 0
, -c3 d32
, C3 d32
2+(k +k
2 2
-k d 2+k 2 d
k 2 d
0
1 2
0 '
0 0
1 0 1 ' 2 0 2
'
-k d02+kl dl 20
, ko d02+kl dlz
, 0
,
d2 20
, 0
, <2 d22+k3 d32 ,
, 0
, -k3 d32
,
a0+20(ml+m2+m3), 0 r 0 I \ al , O , 0 I a2 , O , O , a3 , O , 0 ,+c2 20 , -C1 20 ,
-c2 20
dl
, -cl dl ,
0
d2
, 0
,
-c2 d2
(kl+k2) 20 , -kl 20 , -k2 20
F = I "kl I O
k2 d2 , O , -k2 d2
O
,
0
z
0
Värt att notera är att matriserna A, B, C, D, E, F är
konstanta samt att matriserna A, B, C är symmetriska. 60 91 Sätt 5= 92 _93 f (z, z, 2, t) = - E 21 - F 21 á 22
A§+Bå+cg=f<2,å,2,t
(4.10)
VTI MEDDELANDE 52Numerisk lösning av systemet med differentialekvationer
Detta ekvationssystem är besvärligt att lösa manuellt
ty ekvationerna är kopplade. I litteraturen och i program-bibliotek finns ett flertal numeriska metoder
till-gängliga för att lösa begynnelsevärdesproblem av typen:
där f är en vektorvärd funktion av vektorn § och tiden t. Dessa metoder är följaktligen ej direkt applicerbara på systemet som är av andra ordningen. Genom att införa
standardsubstitutionen
kan ekvationen (4.10) skrivas:
P Q. + (D Qi + (3 M N H1'
E = 5
(4.11)
Multiplicera ekvationen (4.ll) med A_l från vänster:
$ (4.12)
Ekvationssystemet (4.12) kan skrivas som:
-A"1 B -A'1 C &: A'JL E (4.13)
där enhetsmatrisen E = 0 CD 9 F4 0 t> r 4 o 0 +4 0 C) +4 0 c: o VTI MEDDELANDE 52
bil 0 OI
Ekvationen (4.13) kan skrivas som:
(4.14)
k<
2! II 6)
'<1 + :13
Ekvationen (4.14) kan nu lösas numeriskt i dator och det är således möjligt att för varje fix tidpunkt beräkna derivatornas värden om variablerna är kända för
tidpunk-ten i fråga.
Numeriskt beräknas värdena av variablerna vid tidpunkten (n + 1) At med kännedom om värdena vid tiden nAt. I före-liggande program användes en Runge-Kutta metod som för
ett problem på formen (4.14) innebär:
kl = f (yn, nAt)
E=E<§
2 n+512
2 l'(n+-]l)At)
2-
__ - -
At -
1
k3 - f (yn + '-2- kz, (n + k4 = f (yn + At k3, (n + 1) At)At-
-
-+ 7; (kl -+ 2k2 -+ 2k3 -+ k4)Yêl_êY_Ei駧§9
Matematisk analys av rörelseekvationerna ger att bär-armens och mätbär-armens egenvinkelfrekvens blir i stor-leksordningen 10 Hz varför tidsteget bör väljas till ungefär 0,01 sek.
Detta medför att datorkörningen tar förhållandevis lång tid.
Det finns alltså behov av att ytterligare förenkla
mo-dellen, utan orimlig förlust i noggrannhet, för att få
ner körtiden på datorn. Sålunda införs approximationen att bär- och mäthjulens fjäder- och dämpkonstanter för-summas. Denna nya modell kommer i den fortsatta fram-ställningen att benämnas "strippad" modell. Se figur 4.3 och 4.4.
O
/
/Vd0
L ./ /*. 4øøøøø,,,,øøø*çe /, A 0 A V i 'D-/ i lS'
/. AlA 1/4
I 0 /2
.//
ä
/ 20A 77%77'
/
/Ä R/_
0
;E
Figur 4.3 "Strippad" moaell av vagnens ram (1) och bärarm (2)
d3
. a3 _ // ./
93
i « a' @ (] m3'I3/'
V
= GIT/p,
'år-4»-
;
/
{
'
/ r ! m2,12 Eä-å / s /,
®
.
A/
5 20 __ a2 __ 22/ 779777
WWW
/ Z0 dz / /Figur 4.4 "Strippad" modell av vagnens belastningsarm (1)
och mätarm (2).
Rörelseekvationer för "strippad" modell
På samma sätt som tidigare används Lagrange's ekvation och systemets totala energi kan tecknas
529?El§5ê-§§§59l9
Te z % IO éO2 + % m% Il élz + % m1 (al
% I2 é22 + % m2 (az
% I3 G332 + % m3 (a3
VTI MEDDELANDE 52 20 60 + 20) (4.16) 1 2 2 + 5 k3 d3 (93 - 62) (4.17) 1 2 0 o -2- C3 (13 (93 - G2) (4.18)lgâêäêsés_ê2_äyâ99äyållkes
Tvångsvillkoren får följande utseende:
20 + 20 90 + dl 91 = Zl
(z - z - 20 60) (4.20)
N
Deriveras dessa 1 respektive 2 gånger m a p tiden fås:
él = äå (ål - áO - 20 éo)
(4.21)
61 = (3-11 (21 - 20 - 20 60)
(24.22)
62 = äâ (á2 - åo - 20 éo)
(4.23)
öz = äâ (§2 - 50 - 20 60)
(4.24)
Tvångsvillkoren insättes i energiekvationerna och redu-cerar dessa till två frihetsgrader med följande utseende:
Elêåälêäê_§âêäglê
_ 1
-
1
'
Te ' E I0 90 + ä m0 (ao 60 + 20) +
I1
.
.
-
2
1
a1
o
2
(Zl ' z0 ' 20 G)0) + 5 ml ä_ (Zl ' z0 ' Q0 90)
d
1
-2
1
2
I 2
2
1
20 90 + 29]
+ % 2
a
-2
(Zz ' Z0 ' 20 90)
+ 5 m2
2
a2 . _ 2 a: (22 - ZO - 20 90) + 20 90 + 20] +1
2
1
-
2
3 13 93 + 5 m3 (a3 93 + 20 90 + 20) (4.25)Eegêazlêllê_ê9êägig
2
_ i
2
_ ;L
_
_
V
2 k0 d0
60
dl (Zl
20
20 90)
+
1
2
1
2
5 kd d3 [63 - a; (22 - zO - 20 90)] (4.26)QiêêlEêElYê-êE§Eng
2
_ l
2
_ ;L
_
_
R - 2 CO do [60 dl (21 20 20 ©0)] +i 0 d 2
2
3 3
é - ?L ('
3
dz
22
- '
20
- 2 é )
0
0
2
(4 27)
'
VTI MEDDELANDE 52Dessa uttryck sätts in i.Langrange's ekvation och deri-veras m.a.p de generaliserade koordinaterna 90,63.
Där-vid erhålles ramens rörelseekvation.
2
Il
I2
I0 + m0 a0
+ 20 (m2 + m2 + m3) + 20
d
2 +
d
2 '
1
2
2
m a m a2
1 1
2 2
2 2
1 1
2 2
v
220
d
+
d > + 0
d 2 +
2
90 +
1
d2
,
c d32 20 9 + k d 2 1 + 59 2 + k 2 2 2-
3
d
3
0
0
d
3
0
9 +
0
2
1
d
d32
k3 20 ä- G3 + m0 a0 +20 (m1 + m2 + m3) +2
1_
I I m a m aQT)<_ÅE-+ -åö - 2 20 (rå 1 + å 5) +
dl
az
.
1
2
2
2
2 mlal +m2a2 + x i 1-1 ._0
d
2
d
2
Z0
ml
0 d
1
d
1
1
2
I1
20
a2
a I1
Q0
n
2 + m 2 - l - - - 2 +d 2
1
2
0 d2
(
az)
(i 2
2
1
2
a
2
2
d
2 1
ä"0
+C33
-
201
1,
d 2
d 2
2
d 2
CL1+A)'Z_c/Q.â_g+
0 dl
dl
1
3
0 d 2
2
1
2
2
2
d
21_
0
3
1
1
d2
2
k d 2 QL
0
0
d
1 +
39
d
Zl
- k
3 to
^
få_
2
22
- 0
(4 28)
'
1
1
d2
VTI MEDDELANDE 52samt belastningsarmens rörelseekvation H . 2 H m3 a3 20 90 + (13 + m3 a3 ) 63 +
d32
2 -
d32
C3 20 az 60 + C3 d3 93 + k3 20 az 90 +
- 2 k3 d 2 63 3 + m3 a3 2O + c3 d2-2- åO -C.132 . d32 d32 C3 3:- 22 + k3 EE_ ZO _ kB dz 22 = 0 (4.29)Enligt tidigare kan då ekvationen skrivas:
?0
'
?0
90
"
A G3 + B 63 + C 63 + D N +
.0
20
E .1 + F Zl = 0 \4.30)
2
22
där A, B, C är12 x 2 matriser (konstanta och symme*
triska), D, E, F är 2 x 3 matriser (konstanta).
De ingående elementen i matriserna får följande ut-seende:
. 2 2 2 I d + 2 l 1 I 10 {|\ 2 \\lI/ O 2 2 1 + a 2 3 m m /|||\ + 2 2 0 m 2
+
+
mi \ _ I.\ 2 a 2 2 O 2d 2 m+
+
2 l 0 a a 1 ld 0 m m /.|.\ + 2 O 0 ON I 2 <HH ZWUUWH>ZUW mm2 32
då
2 O 3 nVN 3 3k
k
22 32dd
2 O AVN 3k
+ 2My
oNd
+ 1 2(3_2
dd
2 O O Om O 3k
k
(11! âH aEUUmHLWZUm m N l /|I|\ 2_ 2 a d 0 0 ON Om 2 2 m. I _ l_ l a .d _ 1 'l 2_ l a .d 0 O ON l l m _ \|.) \|) 2 2 2 2 2 I .d 2 + 2 + 1 1 I 6. l 0 ON 1 + {\ )3 Om m + + 2 m 2 + d 2 l m ( + 0 1._ ON d + 1 O. ( a _ O O Om m 2 = D3 2 2 2 qd d 3 2 d d 0 2 2 2 q3_2 O 3 2 d d 2 d Au 3 k 3 3 3 k C C _ _ u _ \) 0.1* ax d ax d + + 1.1_ /1l|1_|\ ( l 1 La 1_d 2 2 O 0 d 0 0 C _ O _ O 2 2 2 2 3 2 3 2 d d d d 0 O 2 2 3 3 C k + + \l/ ) O_1* O 1; AX d ax d + + 1 l ( ( l l l_d ld 2 2 _ ml 2 § 0 13 2 0 qá 2 d d Au d aa d 0 3 O 3 <HH EMUUWUWZUW mm
På samma sätt som tidigare erhålles ekvationen (4.14) § = G y + H (4.31)
OLi
?0
där y =
OL2
=
93
90
G0
63
G3
-A'1 B -A-1 C G:E
0
1
0
0
0
E: 0.:0
1
0
0
A-1 f 0 H = ._ ; 6 =0
0
Ekvationen (4.31) kan nu lösas numeriskt.
Variablerna 91, 92 beräknas sedan genom insättning
i tvångsvillkoren (4.19) och (4.20).
SIMULERINGSPROGRAM FÖR BVll
Huvudprogram
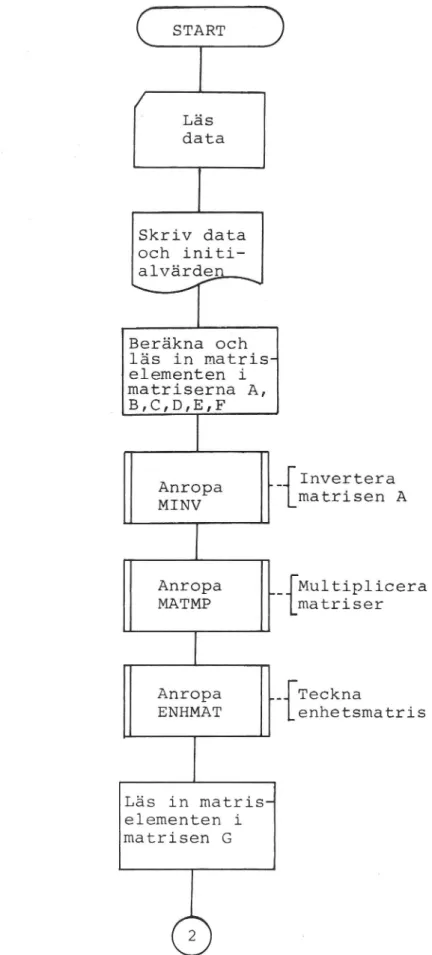
Av flödesschemat, figur 5.1. framgår att i huvudpro-grammet sker följande:
1. Läsning och utskrift av data
2. Uppdatering av den konstanta matrisen G i
diffe-rentialekvationen (4.l4)
3. Integrationsalgoritmen enligt Runge-Kutta utföres 4. Uppdatering av ramens och armarnas vinklar samt
dess derivator
5. Uppdatering av bär- och mäthjuls normalkraft.
Beräkningsgången i subrutinen RUNGE
Denna rutins uppgift är att beräkna högerledet i (4.14) för användning i (4.15). Först sker en uppda-tering av matrisen Hj_(4.l4). Denna matris är tids-beroende och måste beräknas för varje tidssteg. Där-efter multipliceras matrisen G med vektorn § i (4.14). Summation av matriserna i högerledet ger de olika
koefficienterna i Runge-Kutta algoritmen.
Subrutinerna ENHMAT, MATMP och MINV
Dessa är standardrutiner för matrisberäkningar ENHMAT: Uppdaterar enhetsmatrisen
MATMP: Beräknar matrismultiplikationer
MINV: Inverterar matriser med hjälp av Gauss'
elimi-nationsmetod
Subrutin PLO4KV
Standardrutin för uppritning av axelsystem och kurvor på bildskärm.
Subrutin BINGO
Denna rutins uppgift är att läsa in vägprofilen från skivminnet samt att beräkna vägprofilens första- och andraderivator med avseende på tiden. Derivatorna beräknas med hjälp av differanskvoter.
Subrutin EVERT
Subrutinen utför en lineär interpolation mellan väg-banans digitaliserade värden samt dess första- och andraderivator.
Inläsning av aktuell vägprofil
Den vägprofil som har använts vid simuleringen är ett vägavsnitt från Sollefteå inspelat på magnetband den 9.4.75. För att digitalisera den analoga vägpro-filen spelas magnetbandet av med en bandspelare till en alalog/digital-omvandlare. Mellan de digitala
värdena har en lineär interpolation skett med hjälp av subrutinen EVERT. Vid uppdatering av vägprofilen på magnetbandet, har ett högfrekvent brus uppkommit. Detta brus filtreras bort genom att använda upprepad
medelvärdesbildning.
Användning av programmet
Nödvändiga datakort för simulering av vagnen finns
tabellerade i tabell 5.1.
Programmet tillåter valfrihet mellan uppritning av:
a. ramens och b. bärhjulets Vid uppritning Input = 1 Vid uppritning Även valfrihet armarnas vinklar
och mäthjulets normalkraft
av normalkrafterna sättes variabeln
av vinklarna sättes Input = 0
vid placering av insignaler tillåtes. Insignal vid kopplingsdonet AMP (l) = 1.0
annars AMP (1) = 0.
Insignal vid bärhjulet AMP (2) = l.O annars AMP (2) = 0.
Insignal vid mäthjulet AMP (3) = 1.0 annars AMP (3) = 0.
Antalet insignaler L = 3 Antalet frihetsgrader NM = 4
Användning av det "strippade" programmet
Programmet användes på samma sätt som det föregående
programmet med ett undantag:
Antalet frihetsgrader NM har sjunkit till 2.
Observera att däckens fjäder- och dämpkonstant skall
läsas in, trots att dessa data ej används vid
beräk-ningarna.
Tabell 5.1 Sammanställning av datakort för inläsning vid simulering av BVll
. u "
For-Nr Kod Beteckning for Falt mat Enhet
]. TRO Ramens tröghetsmoment 1-10 FlO.3 kgm TRl Bärarmens " 11-20 FlO.3 kgm TR2 Mätarmens " 21-30 FlO.3 kgm
TR3 Belastningsarmens _ 2
tröghetsmoment 31 40 F10'3 kgm'
2 WO Ramens massa 1-10 FlO.3 kg
Wl Bärarmens massa 11-20 FlO.3 kg W2 Mätarmens " 21-30 FlO.3 kg
W3 Belastningsarmens 3l_40 FlO.3 kg
massa
3 A0 Ramens tyngdpunktavst. 1-10 FlO.3 m Al Bärarmens " 11-20 FlO.3 m A2 Mätarmens " 21-30 FlO.3 m A3 Belastningsarmens 31-40 FlO.3 m
tyngdpunktavstånd
4 D0 Ramens fjäderavstånd 1-10 FlO.3 m
D1 Bärarmens " 11-20 FlO.3
02 Mätarmens " 21-30 FlO.3
D3
B3iastnlng§armens
fjaderavstand31-40 FlO.3
m
Nr
Kod
Beteckning för
_ Fält
Enhet
5 SKO Fjäderkonstant mellan 1-10 F10.3 N/m ramen och bärarm
SKl Barhjulets fjäder- ll_20 F10.3 N/m konstant SK2 Mathjulets fjäder- 21_30 F10.3 N/m kontant SK3 Fjäderkonstant mellan ' belaStningsarm och 31-40 F10.3 N/m mätarm
6
C0
Dämpkonstant mellan
1-10
F10.3
Ns/m
ramen och bärarm
C1 Bärhjulets dämpkonst. 11-20 F10.3 Ns/m C2 Mäthjulets dämpkonst. 21-30 F10.3 Ns/m C3 Dämpkonstant mellan belastningsarm och 31-40 F10.3 Ns/m mätarm 7 SO Axelavstånd 1-lO F10.3 m 8 NM Antal frihetsgrader 1-5 IS L Antal insignaler 6-10 IS
9
TIME
Starttid för simul.
1-10
F10.3
s
TSTEP Langden av integra- ll_20 F10.3 s
tlonssteget
TLAST Tldpunkt da Slmule- 2l_30 F10.3 s
rlng avbryts
10 BGV(l) Ramens tidsoeriverade l_lO F10 3 rad/S begynnelsev1nkel
BGV(2) Bärarmens tidsderlve- ll_20 F10 3 rad/s
rade begynnelseV1nkel
BGV(3) Mätarmens tidsderlve- 21_3O F10.3 rad/S rade begynnelsev1nke1
BGV(4) Belastningsarmens
tidsderiverade be- 31-40 F10.3 rad/s
gynnelsevinkel
BGV(S) Ramens begynnelse- 4l_50 F10 3 rad Vlnkel
Nr Kod Beteckning för Fält For-mat Enhet 10 BGV(6) BGV(7) BGV(8) Bärarmens begynnelse-vinkel Mätarmens begynnelse-vinkel Belastningsarmens be-gynnelsevinkel 51-60 61-70 71-80 F10.3 F10.3 F10.3 rad rad rad 11 Konstant för kOpp-lingsdonets insignal Konstant för bärhju-lets insignal Konstant för mäthju-lets insignal F10.3 F10.3 F10.3 12 KM Antal datapar per post
vid vägprofilens
upp-läggning i datorn IS
13 STEG Tidsteg mellan
väg-profilens digitala värden '
'F10.3
sek 14XSTEP XMAX YMAX YSTEP
Steget mellan
grade-ringen på tidsaxeln
vid uppritning av ra-mens och armarnas vinklar
Tidsaxelns maxvärde
vid uppritning av
ramens och armarnas vinklar
Ramens och
armar-nas maxvinklar Steget mellan
gra-dering på vinkelaxeln 11-20 21-30 31-40 F10.3 F10.3 F10;3 F10.3 rad rad VTI MEDDELANDE 52
Nr Kod Beteckning för Fält matFor- Enhet
15 XSTE
XMA
YMA
YSTE
Steget mellan
grade-ring på tidsaxeln vid
uppritning av bärhju-.lets och mäthjulets
normalkraft
Tidsaxelns maxvärde vid uppritning av bärhjulets och mät-hjulets normalkraft Bärhjulets och mäthju-lets maximala normal-kraft
Steget mellan
grade-ring på normalkrafts-axeln 11-20 21-30 31-40 F10.3 F10.3 F10.3 F10.3
16 INPUT Val av utmatning I5
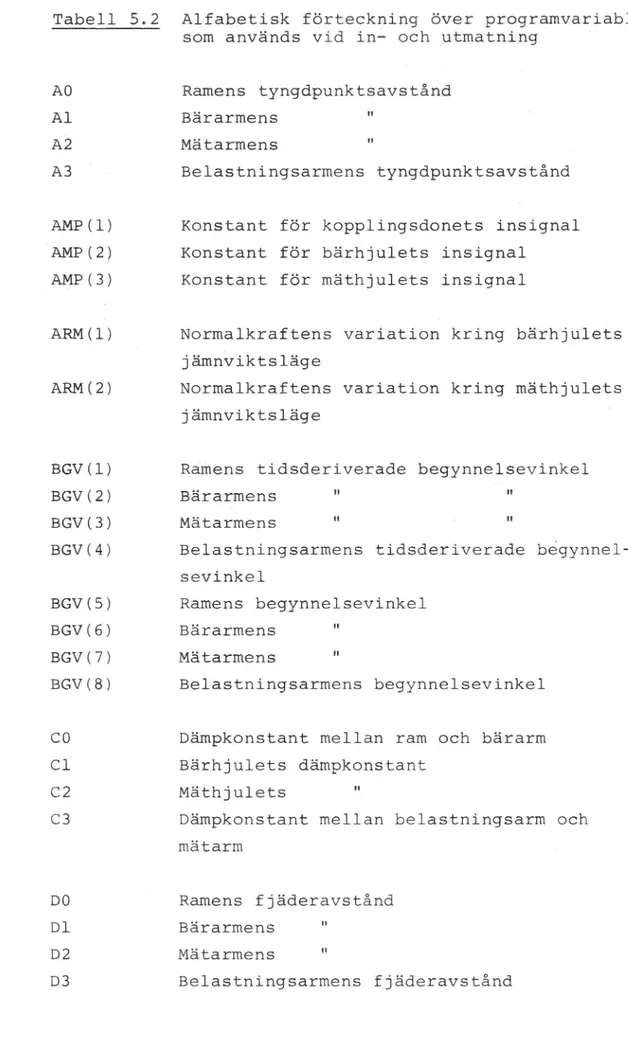
Tabell 5.2 A0 A1 A2 A3 AMP(l) 'AMP(2)
AMP(3)
ARM(l)
ARM(2)
BGV(1) BGV(2) D0 Dl D2 D3 'MätarmensAlfabetisk förteckning över programvariabler som används vid in- och utmatning '
Ramens tyngdpunktsavstånd Bärarmens
ll
Mätarmens
Belastningsarmens tyngdpunktsavStånd Konstant för kOpplingsdonets insignal
Konstant för bärhjulets insignal
Konstant för mäthjulets insignal
Normalkraftens variation kring bärhjulets jämnviktsläge
Normalkraftens variation kring mäthjulets jämnviktsläge
Ramens tidsderiverade begynnelsevinkel Bärarmens
Mätarmens " * "
Belastningsarmens tidsderiverade begynnel-sevinkel
Ramens begynnelsevinkel Bärarmens
Belastningsarmens begynnelsevinkel Dämpkonstant mellan ram och bärarm Bärhjulets dämpkonstant
Mäthjulets "
Dämpkonstant mellan belastningsarm och mätarm Ramens fjäderavstånd Bärarmens Mätarmens Belastningsarmens fjäderavstånd VTI MEDDELANDE 52
DGA(2) DGA(3) KM NM SO SKO SKl SK2 SK3
Ramens tidsderiverade vinkel Bärarmens
Mätarmens- " "
Belastningsarmens tidsderiVerade vinkel
Ramens vinkel I Bärarmens vinkel
Mätarmens vinkel
Belastningsarmens vinkel
Ramens tidsderiverade vinkel (strippad modell)
Bärarmens tidsderiverade vinkel (strippad modell)
Mätarmens tidsderiverade vinkel (Strippad modell)
Belastningsarmens tidsderiverade vinkel (strippad modell)
Ramens vinkel (strippad modell) Bärarmens vinkel (strippad modell) Mätarmens vinkel (strippad modell)_
Belastningsarmens vinkel (strippad modell) Val av utmatning
Pekare till aktuell vägprofildata (beroende
på datats uppläggning)
Antal insignaler
Antal frihetsgrader för vagnen
Axelavstånd mellan ramens och armarnas
svängningsaxlar
Fjäderkonstant mellan ram och bärarm Bärhjulets fjäderkonstant
Mäthjulets fjäderkonstant
Fjäderkonstant mellan belastningsarm och mätarm
STEG TIME TLAST TSTEP TRO TRl TR2 TR3 WO Wl W2 W3 XMAX XSTE XSTEP YMA YMAX YSTE YSTEP
Tidsteg mellan profilens digitala värden Tiden
Tidpunkt då simulering avbryts
Tidsteget i integrationsrutinen
Ramens tröghetsmoment kring dess tyngdpunkt Bärarmens tröghetsmoment kring dess
tyngd-punkt
'
_
Mätarmens tröghetsmoment kring dess tyngd-punkt
Belastningsarmens tröghetsmoment kring dess
tyngdpunkt
Ramens fjädrande massa Bärarmens fjädrande massa Mätarmens fjädrande massa
Belastningsarmens fjädrande massa
Tidsaxelns maxvärde vid uppritning_av bär-hjulets och mätbär-hjulets normalkraft
Tidsaxelns maxvärde vid uppritning av ra-mens och armarnas vinklar
Steget mellan gradering på tidsaxeln vid uppritning av bärhjulets och mäthjulets normalkraft
Steget mellan gradering på tidsaxeln vid uppritning av ramens och armarnas vinklar Bärhjulets och mäthjulets maximala normal-kraft
Ramens och armarnas maxvinklar
Steget mellan gradering på normalkraftsaxel Steget mellan gradering på vinkelaxeln
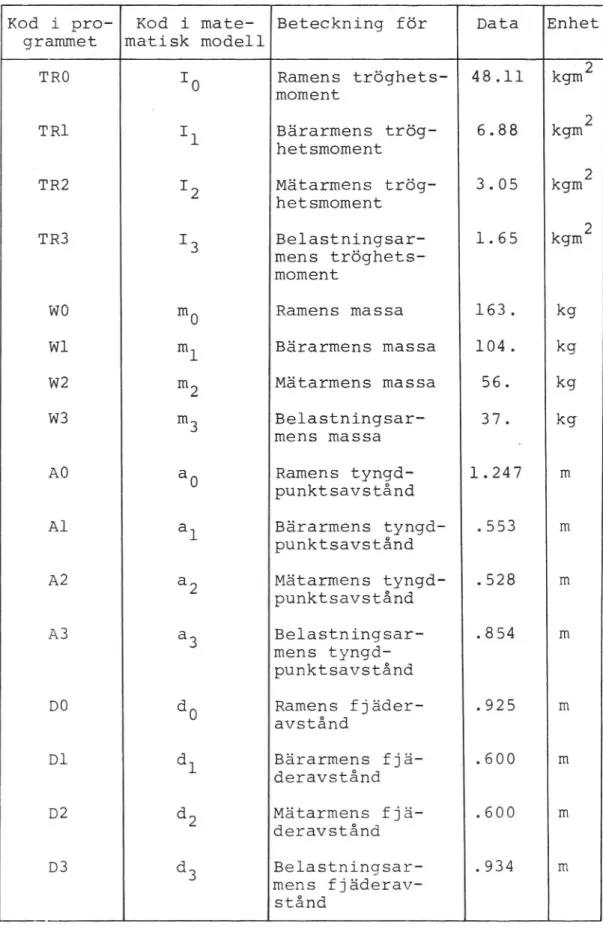
Tabell 5.3 Aktuella indata för friktionsmätvagn BVll vid test av simuleringsprogram
Kod i pro-4 Kod i mate- Beteckning för Ixnxi Enhet grammet matisk modell
TRO IO Ramens tröghets-' 48.11 kgm2
moment TRl Il Bärarmens trög- 6.88 kgm2 hetsmoment TR2 I2 Mätarmens trög- 3.05 kgm2 hetsmoment TR3 I3 Belastningsar- 1.65 kgm2 mens tröghets-moment WO m0 Ramens massa 163. kg Wl ml Bärarmens massa 104. kg
W2 mzy Mätarmens massa 56. kg
W3 m3 Belastningsar- 37. kg mens massa A0 aO Ramens tyngd- 1.247 m punktsavstånd Al al Bärarmens tyngd- .553 m punktsavstånd A2 a2 Mätarmens tyngd- .528 m punktsavstånd A3 a3 Belastningsar- .854 m mens tyngd-punktsavstånd DO d0 Ramens fjäder-o .925 m avstand Dl dl Bärarmens fjä- .600 m deravstånd D2 d2 Mätarmens fjä- .600 m deravstånd D3 d3 Belastningsar- .934 m mens fjäderav-stånd
VTI MEDDELANDE 52
Kod i pro- Kod i mate- Beteckning för Data. Enhet
grammet natisk modell '
SKO
K
Fjäderkonstant
49000.
N/m
mellan ramen ochlbärarm 0 Bärhjulets fjä- 348000. N/m derkonstant SKl K SKZ K Mäthjulets fjä- 161000. N/m derkonstant Fjäderkonstant 11500. N/m mellan belast-^ ningsarm och mätarm SK3 K Dämpkonstant 2200. Ns/m
mellan ramen och ' bärarm CO C Bärhjulets dämp- 2200. Ns/m konstant Cl C C2 C Mäthjulets dämp- llOO. Ns/m konstant C3 C3 Dämpkonstant llOOE Ns/m mellan belast-ningsarm och mätarm SO 2 Axelavstånd 1.075 m NM Antal frihets- 4 grader vid' "strippad" 2 modell L Antal insigna- 3 ler TIME Starttid för 0 s simul.
TSTEP Längden av inte- 0.005 s
grationssteget
vid "strippad" 0.02 3 modell
TLAST Tidpunkt då si- 10 s
mulering av-bryts
_Kod i mate-matisk modell Kod i pro-grammet Beteckning för Data Enhet BGV(l) BGV(2) BGV (J3) BGV(4) BGV(S) BGV(6) BGV(7) BGV(8) AMP(l) AMP(2) AMP(3) KM STEG
Ramens tidsderive-rade begynnelse-'vinkel Bärarmens tidsde--riverade begyn-nelsevinkel Mätarmens tidsde-riverade begyn-nelsevinkel Belastningsarmens tidsderiverade begynnelsevinkel Ramens begynnel-sevinkel Bärarmens begyn-nelsevinkel Mätarmens begyn-nelsevinkel Belastningsarmens begynnelsevinkel Konstant för kOpplingsdonets insignal Konstant för bär-hjulets insignal Konstant för mät-hjulets insignal Antal datapar per post vid Vägpro-filens upplägg-ning i datorn Tidsteg mellan Vägprofilens digitala värden 44 0.01 rad/s rad/s rad/s rad/s rad rad rad rad sek VTI MEDDELANDE 52
Kod i mate-matisk modell
Kod i
pro-grammet Beteckning för Data Enhet
XSTEP XMAX YMAX YSTEP XSTE XMA YMA YSTE Steget mellan graderingen på tidsaxeln vid uppritning av ramens och ar-marnas vinklar
Tidsaxelns
max-värde vid upp-ritning av
ra-mens och armar-nas Vinklar
Ramens och
armar-nas maxvinklar Steget mellan gradering på vin-kelaxeln Steget mellan gradering på tidsaxeln vid uppritning av bärhjulets och mäthjulets nor-malkraft Tidsaxelns max-värde vid
upp-ritning av bär-hjulets och mät-hjulets normal-kraft Bärhjulets och mäthjulets maxi-mala normalkraft
Steget mellan
gra-dering på normal-kraftsaxeln 10. 10. 1000. 200 rad rad VTI MEDDELANDE 52
)
Läs data Skriv data och initi-alvärden Beräkna och läs in matris elementen i matriserna A,B,C,D,E,F Invertera AnrOpa .- matrisen A MINV Anropa b_ Multiplicera MATMP matriser Anropa __ Teckna ENHMAT enhetsmatris
Läs in matrisd elementen i matrisen G
Figur 5.1 Flödesschema för huvudprogram
Endast vid "strippad" modell Figur 5.1 VTI MEDDELANDE 52 AnrOpa Runge
__ Starta num. lösning
att beräkna RATE l
Anropa
Runge
b-_{Beräkna RATE 2
Anropa
Runge "'{:Beräkna RATE 3
Anropa
Runge
"{Beräkna RATE 4
I
Beräkna ramens och armarnas vinklar samt dess förstader r'_ _"-"_ _"7 lInför mätar- I 'mens och bär- |'armens tvångs-:
brillkor
Rita ramens och armarnas vinklar55
C9
' "' _""1
,Beräkna ram- I
Endast Vidlvinkelns och : "strippad",armvinklarnasl modell landraderiva- : .I Beräkna bär-armens normal-kraft Rita bärar-mens och mät-armens nor-malkraft
\Ja
TIMEZ>TLASTGå ett tidssteg
Figur 5.1 Flödesschema för huvudprogram (forts)
Q
)
Uppdatera variabler
Beräkna Vägprofi-Anropa _-.. len samt dess
EVERT ' första- och andra-derivator Anropa .L.- Matrismultipli-MATMP kation
Beräkna hö-gerleder i diffekva-tionen Beräkna RATE
(
3
Figur 5.2 Flödesschema för subrutinen RUNGE
C
J
Uppdaterar
variabler
\Anropa _nu_ Läser in
Bingo Vägprofilen
- NV=NV+1
J
_ Ja Anropa ____ Läser in Nej NV=NV+l Lineär inter-polation av vägprofilen samt dess första- och andraderivator <: RETURN :>Figur 5.3 Flödesschema för subrutin EVERT
FAKTORER SOM KAN INVERKA PÅ FRIKTIONSMÄTVAGNENS MÄT?
RESULTAT
'
AllmäntSom framgår av kap 3 känner mäthjulet av det bromsande momentet. Detta moment omvandlas till ett friktionstal på en skrivare. Vid framtagandet av friktionstalet
förutsätter man att:
0 Det uppmätta bromsande momentet är lika med frik-tionskraften multiplicerat med en konstant däcks-radie.
o Friktionskraften är lika med friktionstalet
multi-plicerat med den konstanta normalkraften.
De faktorer som kan misstänkas vara en felkälla i mät-resultatet skulle vara att
0 Normalkraften varierar
o Däckets radie varierar
Värt att notera är att det friktionstal som man vill mäta, är det friktionstal som en personbil skulle
er-fara med samma yttre förhållanden. Detta leder till att hänsyn som, att friktionstalet i framföringsrikt-ningen sjunker i en kurva, inte skall tas med.
6.2 Normalkraftens inverkan på friktionstalet Fig 6.1 N dyn Mb = bromsande moment F = friktionskraft Ndyn = dynamisk normalkraft mg = statisk mätbelastning R = däckets radie
uupp = uppmatt friktionstal UV = "verkligt" friktionstal Mb = F-R (6.1) F = pupp. mg (6.2) F = pv°Ndyn (6.3) (6.2) och (6.3) ger _ m9 UV - pupp(Ndyn) (6.4)
rSlutsats: Av ovan inses att det "verkliga" friktions-talet starkt beror av den dynamiska normalkraften.
Denna beräknas i bilaga C.
.4
Normalkraftens inverkan på mäthjulets Slip
Som framgår av kap 3 finns en fast utväxling mellan mät-hjulet och bärhjulen. Detta medför att mätmät-hjulet bromsas kontinuerligt med ett Slip av ca 17%. Mäthjulets slip kan avta och öka bärhjulens spin.om mäthjulets normal-kraft blir större än de två bärhjulens normalnormal-krafter
tillsammans. Skulle mäthjulets slip minska, minskar även friktionstalet, eftersom friktionstalet är starkt
beroende av slippet, se fig 2.5.
Däckradiens inverkanåpå mätresultatet
Det uppmätta friktionstalet är direkt proportionellt (6.1) (6.2).
tioner hos friktionstalet kan alltså bero på följande.
mot mäthjulets däckradie, se och
Varia-A- Eiglêslêê29299s9§_222s55ê9_9å_§ä§E§E§_§§éiê
Enligt BVll systemanalys ändrar sig däckets centrum-höjd linjärt med hjulbelastningen. Vid en variation av hjulbelastningen mellan 500-2000 N blir skillnaden av däckets centrumhöjd 13 mm.
B- EêêEiqbsEs9§_igys55ê§_på_êä95§2§_rêêiê
Enligt BVll systemanalys ändrar sig däckets centrumhöjd linjärt med hastigheten. Vid en variation av
hastig-heten mellan O-lOO km/h blir skillnaden av däckets
centrumhöjd 6 mm.
EXEMPEL PÅ UTSKRIFT AV KURVOR OCH DATA FRÅN PROGRAMMET Ursprunglig modell 1000 800 400 200 -200 -400 -600 -800 1000 1000 800 600 400 200 -200 -400 -600 -800 -1000 100 804 601 40 20 -20* -401
-601
A A I ' f ' U T Y v-j r u ull.q I
Mäthjulets normalkrai,svariation som funktion av tideI . q 9' ' 10 TIME(s)
'|A. ..':. .. 41
|, x!
v v'
i
i i b I. 4 'i 1 TIME(s) 10 h«.lt.11t1H * 1' h'
i ,« U
1 'H
Bärhjulets normalkra.tsvariation: som funktion av tide
/\ .M
(1 A:
_
;
;
NV
V
7\/8
Vägprofilhöjd som funktion av tiden
: M
9
\1'0
TIME(s) -Ti VTI MEDDELANDE 5240* 20 b -20" -40#
9.
_
TIME (s)
Mätarmens och belastningsarmens vinkeländring som
' funktion av tiden. Mätarm = 92 :EJ , Belastningsarm = 9
10 3
8
l 2 3 5 6 7 9 10
TIME(s) Ramens och bärarmens vinkeländring som funktion av
tiden. Ram = 60 = ak, Bärarm = 61
Vägprofilhöjd som funktion av tiden
Strippad modell erOOO'P
EL 800«
600.; 400 2004 0 -2006 -400« -6000 _8000 -1000 #51000 2 8000 6000 400n 200" 0 .Å -200 -400 -600 -800 -1000100W
*4 80$
60
40* 20 -20" -40T-601
l 2-M
. Li :ut i Ill 1
rv'
'g
M '1"
"
l i Bärhjulets normalkraftsvariationjÅA
., N Wax/va
som funktion av tiden
\/ 10
TIME(s) Vägprofilhöjd som funktion av tiden
2; 0,10 m 0,08* H vd 0,06 0,04 0,02 _0,02 _0,04 -0,08 -0,10 ra d 0,06 0,04 0,02 V -0,04 -0,06 -0,08 -0,10 60 40 20 -20 -40 -60 0,08. TIME(s)
o Mätarmens och belastningsarmens vinkeländring som funktion =D, Belastningsarm==03
0 av tiden. Mätarm==02,
lO TIME(s)
_ Ramens och bärarmens vinkeländring som funktion av tiden
WL Ram :9 O = 46, Bärarm= 61
.
1
2
4
' 52
6
7
9
V ,8 A 7 A§3
;
<.P
g
.
§3
00
f
3
Vägprofilhöjd som funktion av tiden
. .. E z ...0 .1. .. .2 .L L 1 .I L 4...LL a; Fb .
| .34-5
a. s. ;P = i". êüü'åü:' 1E S 1E .ut .L L mm ...ha Å , ..-.c I .no-0. .-c. 0. $ 6 11 ... Nu ». r Nm H D Z < Q M D O M Z H B > a. få :71 C71 1E 1i Wai 0--Referenser
l. Kummer H.W., Unified Theory of Rubber and Tire Friction.
Engineering Research Bulletin B-94. The Pennsylvania State University, Pennsylvania, 1966.
2. Ohlsson Evert, Formgren Carl och Nordström Olle, Friktionen i Vägsammanhang, teorier och
praktiska frågor.
Internrapport 94, Statens väg- och
trafik-institut, 1972.
3. Mattsson Matts, Rungvist Hans, Friktionsmätvagn BVll:3.
Beskrivning och instruktion. Internrapport 44, 1971.
4. Wells D.A., Theory and Proglems Lagrangian Dynamics. Schaum's outline series, 1967.
5. Nordmark S, Klassisk mekanik med tillämpningar inom fordonsdynamiken.
Meddelande nr 3, Statens väg- och trafikinsti-tut, 1976.
6. Sinha B.P., Influence of Road Univenness on Road
Holding and Ride Comfort. .
Rapport nr 28, Statens väg- och trafikinsti-tut, 1973.
7. Nordmark S, Datorprogram för digital simulering av dubbelt körfältsbyte med en tung fordonskom-bination.
Rapport nr 96, Statens Väg- och
trafikinsti-tut, 1976.
8. Fenton J, Handbook of automotive design analysis. Mecrury House Business Publications LTD.
9. Kallin S, Fortran. Studentlitteratur, 1972.
BESTÄMNING AV VAGNENS MASSOR, TYNGDPUNKTSAVSTÅND OCH TRÖGHETSMOMENT
A.l Vagnens massor (m) och tyngdgpnktsavstånd (a).
A;l.l Ramen: Y G (tyngdpunktaxel)
U
ao
+
V
-
5106
1
_
5105
.a03' a04
(302
§ I _J<1'
F
m 3
mos
aOl 020R]
C 02JP
m
m 8
Ino:L \\JELL_. __Q§_// dmoz
_
m03
mos
.FJ i
1 = I g/
01
103L
205
J
Fig A.l Förenklad modell av ramverket
a01==0,435 m 201==O,86O m m01==24'kg a02==0,925 m 202==l,lOO m m02==16 kg a03==l,075 m 203==O,305 m m03==2><5 kg a04==l,075 m 204==l,100 m m04==6l kg a05==l,720 m 205==O,93O m m05==2><l2 kg a06==2,160 m 206==l,360 m m06==28 kg Zm0==163 kg VTI MEDDELANDE 52
.1.
Gemensam tyngdpunktaxel aO blir
6 . aO ==ÅL - 2mO 1:1 a .-m .01 01 'a0 ==;L(mmO 01 a01 +-m02 'a02 *#m03 'a03 4-m04 a04+-m05 a05 + m06'a06)-1,247 m 1353132512_ I Y G (tyngdpunktsaxel) a
l
1
C312
m
12all
,I
ü//
,G
mll
12
911
,4
Fig A.2 Förenklad modell av bärarm
all==0,530 m Rll==l,060 m mll==2><35 kg a12==0,600 m 212==O,275 m m12==2><17 kg
Zml==104 kg
Massorna mll och m12 är dubblerade, då de två
bärar-marna är sammanslagna till en bärarm.
a =-Ã4(a1 ml 11 -m11 +-a12'm12)==O 553 m'
.1.
MäEêL-tm_
* Y a ÅÅG (tyngdpunktsaxel) ;a.322
m
a _ 22 21 __ / m 21JL22
221
Fig A.3 Förenklad modell av mätarm
a21==0,485 m 221==O,97O m m21==35 kg a22==0,600 m 222==0,275 m m22==21 kg Em2 = 56 kg a = Å;(a2 m2 21-m21 +-a22 -m22)==0 528 m'
êêlêêäaiagêêäaz
Y 1 G (tyngdpunkts-Ål a3 axel)a32
ma31
/_32_
Tåg;IH31
1-_\231
32
.Fig A.4 Förenklad modell av belastningsarm
.2.
a3l= 0,442 m
9431:0,884 m
m3l= 6 kg
a32==0,934 m 232==O,100 m m32==31 kg Zm3==37 kg
a.==;L (a3 m3 31 'm31 49a32 'm32)==O 854 m'
Vagnens'tröghetsmoment
a) b) A G (tyngdpunktsaxel) A G (tyngdpunktsaxel) 1F'-F a
m m 2 a m-22 2 2 a) JG==-I§-4-ma b) JG==m°a Figpr A.5 nJGtot=
l-lJGi
Bâmâäls se fig A.l
2 m '2__ 01 01
.
_
2_
2
JGOl---12 +mOl (a0 am) _15,14
kgm-J
(202
m
02 a0 a02
(
-
)2
-1 66 k m2
°
g
2 m -2_ 03 03
_
2_
2
JG03
12
+m03 (ao
303) _0'38 kgm
VTI MEDDELANDE 52.2. .2. J
(304
-m04
(a0
-a04
)2 --1 80'
2
m -2_ 05 05
_
2_
2
7005"
12
05 (ao
305) ' 5'52 kgm
J
G06
-m
06
(a -a)2
06
0
-2334km
" "
g
6
JGOtot=
1-1JGOi
z 48'11 kgm
êêäêzm se fig A-2
2
m. -2_ 11
11
_
2_
2
JG11'
12
+m11 (al 311) " 6'60 kgm
m -2 2__ 12 12
_
2 _
2
JG12- 12 +m12(al alz) -O,28 kgm
2'
2
JGltot=
1-1JGli
= 6'88 kgm
gägêgg se fig A.3 m -2 2_ 21 21
.
_>
2_
2
J021
12
+m21 (a2 a21) _ 2'81 kgm
m -2 2_ 22 22
_
2_
2
JG22'
12
+m22 (az
322)
0'25 kgm
2
2
JG2tot= 1:1 J(321
= 3'05 kgm
VTI MEDDELANDE 52 2 2.2.
§§l§§§2323§êxgl se fig A. 4
2
J :åm3l.231 *Dm .(a -_ )G31
12
31
3 531
J
G32
==m
32
'(a -a
3
32
)2
2
JGBtot:: ,2 Jg31
1=l VT I MEDDELANDE 5 2 2:1445 kgm2
0,20 kgm 1,65 kgm 2 2FRAMTAGNING AV FJÄDER- OCH DÄMPKONSTANTER
'Fjäder mellan mätarm och belastningsarm Uppmätta Värden:
Tråddiameter d==8 mm
Fjäderns medeldiameter Dm==63 mm
Antal verksamma varv n==15,5
Skjuvmodulen G==8-lO4 N/mm2 Fjäderkonstant K
.44 . 4. 4
I(=-§-é--= 8 10 8 3.==lO,6 N/mm
8°n-Dm3 8-15,5'63
Enligt experimentell mätning, se diagram 1 blir
Välj K= 11,5 N/mm
Fjäder mellan bärarm och ramverk Uppmätta värden:
Tråddiameter d==lO mm
Fjäderns medeldiameter Dm==66 mm
Antal verksamma varv n==l4,5,
4 Skjuvmodulen G==8°lO" N/mm2 Fjäderkonstant K 4 4 4 K: God _ 8 10 10 :=24'O N/mm 8-n Dm3 8-l4,5°66 VTI MEDDELANDE 52
Enligt experimentell mätning, se diagram 2 blir ;_Ag __900 _
K--A6 -âåjg-24,5 N/mm
Välj K= 24,5 N/mm
_F jäd er kr aft [N ]
/
/Å
/
500
//
/
250
//
Å /
/Y
//
,/
25 50
H0ptryckning 6 [mm]
Diagram l. Fjäderkraften som funktion av hOptryckningen för fjäder mellan mätarm och belastningsarm.
Bilaga B
Sid 4 (6)
2
V E/
ä
.2
'U mE 750
/
//
500
/
250
/
////
5
10
15
20
25
30
35
HOptryckning ölmmlDiagram 2. Fjäderkraften som funktion av hcptryckning för fjäder mellan bärarm OCh ramverk.