School of Mathematics and Systems Engineering
Reports from MSI - Rapporter från MSI
Implementering av ett inbyggt system
för automatisk styrning av en robotbil.
Martin Aldrin
Jun
2007
MSI Report 07067
Växjö University ISSN 1650-2647
Organisation/ Organization
Författare/Author(s)
VÄXJÖ UNIVERSITET
Matematiska och systemtekniska institutionen
Martin
Aldrin
Växjö University/
School of Mathematics and Systems Engineering
Dokumenttyp/Type of document
Examensarbete/ Diplomawork
Titel och undertitel/Title and subtitle
Implementering av ett inbyggt system för automatisk styrning av en robotbil.
Implementation of an embedded system for automatic guidance of a robot car.
Sammanfattning (på svenska)
Denna rapport beskriver ett examensarbete för högskoleingenjörsexamen i elektroteknik vid Växjö
Universitet. Syftet är att konstruera ett styrsystem till en robotbil som hindrar bilen från att krocka
med objekt i omgivningen när bilen rör sig utan extern kontroll. Roboten ska kunna styras direkt från
en dator via ett virtuellt instrument, ett grafiskt gränssnitt implementerat i Labview. Nödvändig
hårdvara för styrning och kommunikation har konstruerats. Mjukvaran har implementerats i C, Perl
och Labview.
Nyckelord
Labview, styrsystem, robotbil, robot. inbyggda system
Abstract (in English)
This thesis describes a project for the bachelor degree in electrical engineering at Växjö University.
The purpose with this project is to construct a guidance system for a robot car, a program that
prevents the car from colliding with objects when moving without external control. The robot could
also be controlled from the computer through a virtual instrument implemented in Labview. The
necessary hardware for steering and communicating has been constructed. The software is
implemented using three different programming languages, C, Perl and Labview.
Key Words
Labview, guidance system, robot car, robot. embedded system
Utgivningsår/Year of issue
Språk/Language
Antal sidor/Number of pages
2007 Swedish 43
Sammanfattning
Denna rapport beskriver ett examensarbete för högskoleingenjörsexamen i elektroteknik
vid Växjö Universitet. Syftet är att konstruera ett styrsystem till en robotbil, ett program
som hindrar bilen från att krocka med omgivningen. Roboten ska även kunna styras från
en dator via ett grafiskt gränssnitt implementerat i Labview. Nödvändig hårdvara för
styrning och kommunikation har konstruerats.
Det har behövts tre olika programmeringsspråk för att nå de krav som har ställts på
uppgiften, C, Perl och Labview. Microprocessorn i robotbilen har programmerats i C
och gör bilen helt autonom, endast beroende av signaler från avståndssensorer.
Avlusningsprogrammet skrevs i Perl och styrningen från datorn har implementerats i
Labview. Avlusningsprogrammet togs fram på grund av att det blev svårt att hålla koll
på allt som skedde med värden och beräkningar i den automatiska styrningen av
robotbilen.
Innehållsförteckning
1 Bakgrund ... 1
2 Problemformulering ... 2
3 Hårdvara ... 3
3.1 IR-sensorer (Sharp GP2D12) ... 3
3.2 Ultraljud (SRF04) ... 3
3.3 LCD-Display ... 3
3.4 Servo (HS-311) ... 4
3.5 Motorstyrkort (DHB-01) ... 4
4 Resultat ... 5
4.1 Styrkortet ... 5
4.2 Programmeringsuppbyggnad - det automatiska styrsystemet. ... 6
4.2.1 IR-sensorerna ... 6
4.2.2 Servot ... 6
4.2.3 Ultraljudet ... 7
4.2.4 Motorstyrning ... 7
4.2.5 Styrning och hastighetsreglering ... 8
4.2.6 Avlusningsprogram (Debugging-program) ... 10
4.3 Styrning via Labview ... 11
5 Resultatdiskussion ... 13
6 Slutdiskussion ... 13
7 Referenser ... 14
8 Bilagor ... 15
8.1 Automatisk styrning av robotbil. ... 15
8.1.1 Upp1.h ... 15
8.1.2 Upg1.c ... 17
8.1.3 Peripheral.c ... 19
8.1.4 LCD4.C ... 24
8.2 Avlusningsprogram ... 26
8.3 Mjukvara Robotbil för styrning från Labview. ... 35
8.3.1 Uppgift3.h ... 35
8.3.2 Uppgift3.c ... 35
8.4 Programkod Labview ... 42
8.4.2 Motorkontroller ... 43
8.4.3 RS232-funktion ... 43
8.4.4.Ultraljudsfunktion ... 44
1.1.5
IR-funktion ... 44
8.5 Styrkortsschema och Layout. ... 45
Figurförteckning
Figur 1 – Robotbil. ... 3
Figur 2 – IR-sensor. ... 3
Figur 3 - Ultraljudssignaler ... 3
Figur 4 – Ultraljudssensor. ... 3
Figur 5 – Servopulslängd. ... 4
Figur 6 – Motorstyrningskort ... 4
Figur 7 - Anslutningar till PIC-processorn. ... 5
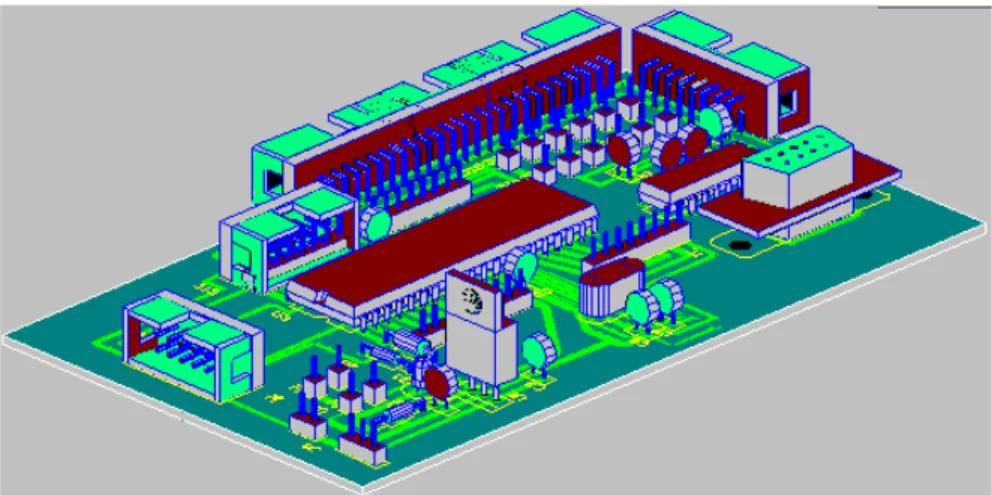
Figur 8 - Styrkort i 3D perspektiv. ... 5
Figur 9 - Ultraljudspositioner. ... 7
Figur 10 – Flödesschema. ... 9
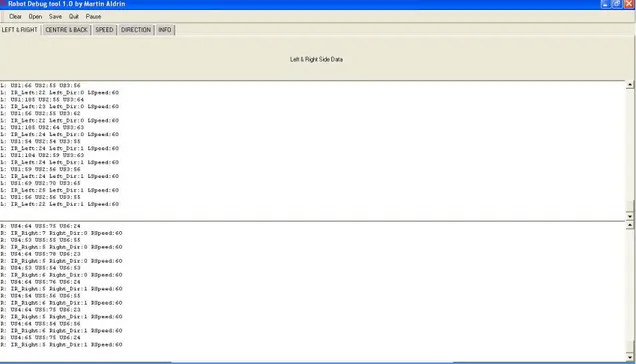
Figur 11 - Avlusningsprogram ... 10
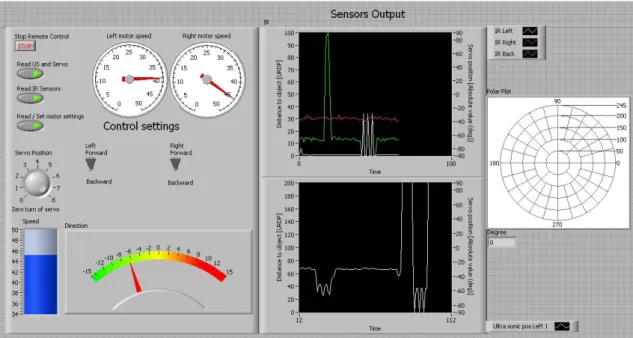
Figur 12 - Labview Frontpanel. ... 12
Tabellförteckning
Tabell 1: Labview - kommandon... 11
1
1 Bakgrund
Examensarbetet har tagits fram av Växjö Universitet för att kunna användas som
utbildningsmaterial i eventuella laborationer för Labveiw och andra
programmeringskurser, t.ex. Realtidssystem och C programmering i inbyggda system.
Uppgiften har varit att se över möjligheterna med robotbilen och se vad som är möjligt
att göra med den typen av utrustning. Rapporten ska också kunna fungera som en
manual.
Rapporten är upplagd enligt följande. I kapitel 2 ges en problemformulering där de
olika delarna och kraven i projektet beskrivs. Vidare, i kapitel 3 beskrivs den hårdvara
som är central och specifik för robotbilen. Kapitel 4 beskriver hur de olika
komponenterna har satts samman och programmerats. Kapitel 5 och 6 förklarar problem
som uppstått under arbetets gång och möjliga förbättringar som vore lämpliga att
2
2 Problemformulering
Komponenter att tillgå är en bil med fyra motorer, tre IR-sensorer, en ultraljudssensor,
ett servo, ett motorstyrningskort, en LCD samt ett utvecklingskort för Microchips
processor PIC16F877A. I uppgiften ingår även att tillverka ett styrkort till robotbilen.
Valet av programmeringsspråk och processor från Microchip är fritt, men även hur
styrkortet ska bestyckas och hur informationen ska skickas till datorn, dvs. via USB
eller RS232. Roboten ska kunna programmeras ”in circuit”, vilket betyder att
processorn ej behövs tas bort vid programmeringen.
Mjukvara för robotbil. Robotbilen ska köra av sig själv utan att stöta emot hinder och
all utrustning ska gå att använda samtidigt som bilen körs. Vid hinder så ska lämplig
åtgärd utföras, så som att svänga eller backa för att undvika att robotbilen kör in i något.
Sensorerna får placeras fritt efter vad som anses vara lämpligt. Funktioner som bilen ska
vara utrustad med är hastighetsreglering som är beroende på avståndet till hinder,
utskrift av värden från sensorer och beräkningar till LCD eller utskrift till dator.
Labview. Robotbilen ska kunna styras från Labview. Kommandon ska skickas till
robotbilen för att läsa av sensorernas värden, hastighet och för att styra den. Det är
valfritt att implementera denna del i samma program som det automatiska eller om det
görs i ett separat program. Viktigt är att Labview endast ska kunna komma åt de
grundläggande funktionerna, dvs. det som behövs för att kunna styra roboten, då
huvudfunktionerna för robotbilens drift ska göras i Labview. I Labview implementeras
en grundläggande mjukvara för att visa att alla funktioner fungerar.
3
3 Hårdvara
Hårdvaran består av en fyrhjulsdriven bil (4WD1
Robot) [1] som är bestyckad med fyra DC-motorer,
tre IR-sensorer, en ultraljudssensor, ett servo, en
fyra bitars LCD med 16x2 rader, ett motorstyrkort
och ett egentillverkat styrkort som är baserat på en
PIC16F877A.
Figur 1 – Robotbil.3.1 IR-sensorer (Sharp GP2D12)
Två av IR-sensorerna har placerats i fronten på sådant sätt
att de korsar varandra, denna placering gjordes för att
roboten ska kunna se hinder på båda sidor. Den tredje har
placerats baktill på roboten. Sensorerna klarar avstånd som
är mellan 10 och 80 cm. De fungerar så att ju närmare de är
föremålet, desto högre spänning utvecklas.
Figur 2 – IR-sensor.
3.2 Ultraljud (SRF04)
Ultraljudssensorn har placerats i fronten av robotbilen på ett servo. Sensorn klarar av
mätningar på upp till två meters avstånd. Sensorn sänder ut en akustiskt pulsformad
signal med en frekvens på 40 KHz. Tiden mellan signalens sändning och mottagning
motsvaras av två gånger sträckan till objektet som reflekterar signalen.
Figur 3 - Ultraljudssignaler
1. Trigger som ultraljudet startas av 2. Ljudet som skickas ut.
3. Ekopulsen som fås tillbaka.
Figur 4 – Ultraljudssensor.
3.3 LCD-Display
Displayen är en XIAMEN OCULAR GDM1602A. Displayen använder sig av en
styrkrets av typen Samsung KS0066U [9]. Displayen har placerats på ett egentillverkat
kort som anpassats för att köras med fyra bitar. Orsaken att fyra bitar har valts är för att
inte blockera in-/utgångarna på PIC processorn. En nackdel med att bara använda sig av
fyra bitar är att displayen blir långsammare. Displayen har ytterligare tre anslutningar,
Enable, RS och R/W. Den sistnämnde har anslutits till jord, därför står displayen alltid i
4
3.4 Servo (HS-311)
Servot är ett standard RC-servo. Det styrs av elektroniska pulser som skickas till servot;
pulslängden är mellan 1-2 ms och periodlängden är 20 ms där 1,5 ms är centrum. Se
bild nedan. Pulsen som skickas behöver upprepas ett flertal gånger för att servot ska nå
den önskade positionen. Om antalet pulser överskrider det maximala antalet pulser som
krävs för att ta sig till den önskade positionen bibehåller servot samma position tills
pulsbredden ändrats.
Figur 5 – Servopulslängd.
Figuren visar exempel på hur en puls kan se ut.
3.5 Motorstyrkort (DHB-01)
Kortet består av en dubbel H-brygga, som kan leverera en maxström på 1 ampere på
bägge kanalerna. Kortet har två ingångar för PWM-signaler samt fyra ingångar så att
motor och riktning ska kunna väljas.
Figur 6 – Motorstyrningskort
5
4 Resultat
4.1 Styrkortet
Styrkortet är baserat på en PIC16F877A från Microchip [2] som arbetar med en
klockfrekvens på 4 MHz. I övrigt består kortet av programmerbara knappar, en
reset-knapp, en strömbrytare samt en RS232-anslutning via en MAX232-krets [10]. Kortet
har även en anslutning för ”in circuit”-programmering.
Kretsen stödjer endast att programmeras med 5 Volt och där igenom har en
in-/utgång på port B sparats. Under programmeringen får ingen extern utrustning vara
ansluten till de specifika ben på processorn som används vid programmering. Skulle
någon extern utrustning vara ansluten till programmeringsingångarna så kan inte
processorn hittas på korrekt sätt av programmeringsprogrammet, i detta fall Melabs
Programmer V4.1.
Kretsschema och layouten för mönsterkortet har gjorts i EDWinXP 1.5.
Figur 7 - Anslutningar till PIC-processorn.Bilden visar vad som har anslutits till de olika in/-utgångarna på PIC processorn.
6
4.2 Programmeringsuppbyggnad - det automatiska styrsystemet.
Programmet som har använts för att skriva koden heter PCWH Compiler version 4,013
[3]. Valet föll på detta program eftersom viss erfarenhet av tidigare versioner fanns.
Till en början testades all extern utrustning på det utvecklingskort som fanns att
tillgå. Detta gjordes för att se att allt fungerade samt för att veta hur all extern
utrustningen skulle kopplas på det senare egentillverkade styrkortet. Se bilaga 8.1.
4.2.1 IR-sensorerna
IR-sensorerna anslöts till de analoga ingångarna på PIC-processorn. Genom det här
tillvägagångssättet fås ett referensvärde mellan 0 och 127. En nolla som referensvärde
motsvarar att inget hinder finns inom räckhåll. Ju högre referensvärde som fås desto
närmare befinner sig hindret.
4.2.2 Servot
Servot [4] styrs med pulser som varierar mellan en och två ms, med en periodtid på 20
ms. För att åstadkomma dessa pulser används en timer med tillhörande
avbrottsfunktion. Servot behöver ha 1200 upprepningar av pulsen som skickas för att
göra en total vridning motsvarande 180 grader..
Timern är en 16-bitars realtidstimer (RTCC). Servot har programmerats så att det
ligger och sveper fram och tillbaka under tiden robotbilen kör. I avbrottsfunktionen som
styr servot finns det även flera villkor när ultraljudet får läsas av beroende på positionen
servot befinner sig i. Positionerna då ultraljudet läses av har bestämts genom att dela
upp antalet upprepningar det tar att gå från ena sidan till den andra i intervall.
Positionerna då servot tillåts läsa kan variera, detta har gjorts på detta sätt för att annars
skulle inte ultraljudet alltid hinna med att läsa av värdena för den aktuella positionen.
7
4.2.3 Ultraljudet
Ultraljudet aktiveras genom att en signal på 5 volt skickas till ingången på sensorn
under 10 µs för att sedan direkt ändras till 0 volt igen. Ultraljudssensorn skickar ut en
akustisk ultraljudsignal, ett ljud med hög frekvens som sedan reflekteras tillbaka om det
finns föremål inom räckhåll. Tiden mellan skickad och mottagen signal varierar
beroende på avståndet till det reflektiva föremålet, denna ekopuls mäts med hjälp av en
timer, i detta fall timer1.
Utifrån tiden som fås från timern, beräknas en skalfaktor för att få avståndet i
centimeter. Detta görs genom att mäta upp avståndet från robotbilen till föremålet som
ultraljudet är riktat mot. Skalfaktorn beräknades till 58, tiden dividerades sedan med
denna faktor varje gång ultraljudet läses av.
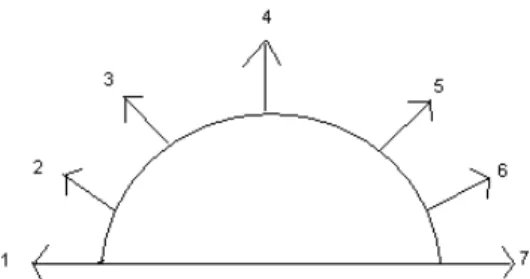
Avståndet till föremål framför ultraljudssensorn avläses på sju olika servopositioner.
Tre värden på vardera sida om roboten samt ett i centrum. Positionerna kan variera lite
beroende på när de läses av. Anledningen till varför inläsningen av ultraljudet har valts
att göras på detta sätt beror på att servot ska röra sig kontinuerligt och aldrig stanna upp.
Det är av mindre betydelse för den här uppgiften att servopositionen är exakt, det
viktiga är att inläsningen görs på rätt sida.
Figur 9 - Ultraljudspositioner.
Bilden visar de olika positionerna i fronten av bilen som ultraljudet får sina värden.
4.2.4 Motorstyrning
Samtliga motorer styrs via ett motorstyrningskort. Det måste styras på det här sättet då
processorn inte klarar av att leverera den ström som krävs samt för att det smidigt ska
gå att ändra riktning på roboten. Från processorn skickas det kontrollsignaler som talar
om riktning och hastighet som motorerna ska ha.
Riktningen styrs genom att ändra spänningen på respektive ingång till 5 volt på
motorstyrningskortet. Hastigheten styrs med hjälp av PWM-pulser. Processorn har två
färdiga funktioner för hantering av PWM-pulser. Genom att aktivera dessa två utgångar
samt ställa in timer2 kan hastigheten regleras genom att ändra på ”duty cycle”.
Värdena på timer2 har angetts så att ”duty cycle” kan ställas mellan 0 och 50. De
lämpligaste värdena att använda är från 34-50 där 50 motsvarar full hastighet. Anges
värden under 34 orkar inte motorerna driva bilen då PWM-pulsernas längd blir för
korta.
8
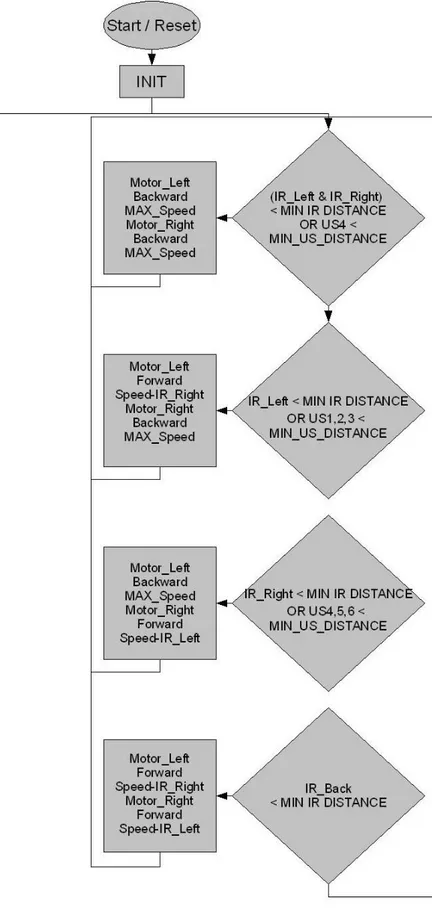
4.2.5 Styrning och hastighetsreglering
Styrningen baseras på de värden som inhämtas från IR-sensorerna och ultraljudet,
medan hastigheten enbart regleras via IR-sensorerna. Styrningen är konstruerad så att
om spänningen från någon IR-sensor hamnar under minimivärdet som har fördefinierats
i programmet, så backar ena motorn medan den andra kör framåt ända tills värdena har
gått över minvärdet igen. Skulle båda sensorerna i fronten hamna under minvärdet så
backar roboten ända tills sensorsignalens värde är över minvärdet. Bilen backar även
om ultraljudet får ett minvärde från centrumpositionen. En nackdel som uppkommer när
robotbilen styrs med hjälp av ultraljudet i fronten är servot. Detta på grund av tiden det
tar för servot att göra en svepning. Det medför att robotbilen svänger mycket kraftigare
om minvärdet kommer från ultraljudssensorerna än om det skulle komma från
IR-sensorerna.
9
Figur 10 – Flödesschema.10
4.2.6 Avlusningsprogram (Debugging-program)
Det insågs ganska snart att det blev näst intill omöjligt att hålla koll på vad som skedde
med alla beräkningar som hanterade styrning och hastighet. Ett försök gjordes att avlusa
programmet via displayen, men det räckte inte då den bara kunde visa 16x2 tecken.
Programmet ändrades då om för att avlusas via RS232-protokollet i
terminalprogrammet Hyper-Terminal. Det blev betydligt bättre då mer mätdata kunde
visas samtidigt, men ingen riktigt bra struktur gick att få. Det blev helt enkelt för
mycket information att hålla koll på. Ett avlusningsprogram togs sedermera i bruk som
skrevs i Perl, genom det här programmet kunde all mätdata från sensorerna och
beräkningarna visas mycket överskådligt i olika programfönster.
Programmeringsspråket Perl [5,6] valdes dels för sin smidiga stränghantering, men
även för att det är mycket lättanvänt utan större förkunskaper. Alla strängar som skickas
från robotbilen förses med två starttecken i början av strängen. Genom att göra på det
här viset kunde mätdata filtreras ut genom att granska de första tecknen som kom in.
Utan att ha tagit fram det här programmet hade det varit mycket svårt att hitta alla
logiska fel och buggar som fanns i koden. Hastigheten som används för att skicka data
över RS232 är 9600 bps. Se billaga 8.2.
11
4.3 Styrning via Labview
Styrningen via Labview har gjorts i ett separat program, det gjordes på grund av ett
minnesproblem som uppkom vid försök av implementering i det befintliga programmet.
Det är dock möjligt att implementera Labview-delen i det befintliga programmet.
Anledningen till varför detta inte har gjorts beror på att det blir svårläst för de som ska
läsa rapporten. För att kunna implementera koden för Labview skulle variablerna
behövts användas mycket flitligare och alla utskrifter av strängarna till
avlusningsprogrammet skulle ha blivit tvungna att tas bort. Mjukvaran i robotbilen
skiljer så att all automatiskkontroll har tagits bort då den styrs ifrån Labview.
Programmet i robotbilen för styrning ifrån Labview sköter all kommunikation till
sensorerna och motorerna på ett likadant sätt som för det automatiska styrsystemet. Det
som skiljer sig är att funktionerna utförs efter inkommande kommando.
Kommandon skickas i form av strängar till robotbilen som filtreras ut innan de
utförs. Efter det skickas värdens tillbaka, även dessa i form av strängar. I Labview [7]
visas mätdata i form av grafer och olika typer av mätare som visar sensorernas värde
och den hastighet som bilen har. Strängarna har anpassats så att de ska vara mycket lätta
att tyda i Labview. Alla strängar har ett kolon framför värdena. Labview har färdiga
funktioner för att leta upp och hämta värden ur strängar. Se tabeller nedan för exempel
på kommandon. Kommunikationen från Labview till robotbilen sker via
RS232-gränssnittet med en hastighet på 14400 bps. Se billaga 8.3 och 8.4.
Enheter Kommando Vänster/Höger/Back Riktning Hastighet Exempel
Motor M L/R 1/0 0-50 MR150
IR IR L/R/B - - IRL
Ultraljud US 9 - - US9
Servo US - 0-8 - US1
Tabell 1: Labview - kommandon.
Tabellen visar de olika kommandon som kan skickas till robotbilen. Det går bra att använda både versaler och gemener.
Enheter Kommando Exempel på strängar som skickas tillbaka
Motor MR150 Left_Dir:1,LeftSpeed:50
IR IRL IR_Left:45
Ultraljud US9 US9:20
Servo - -
Tabell 2: Labview – Exempel på strängar.
12
Figur 12 - Labview Frontpanel.13
5 Resultatdiskussion
Robotbilen förhindrar kollision på egen hand genom styrning på sensorernas signaler
med hjälp av implementerad mjukvara för processorn. Inga yttre påverkande signaler
behövs. Problem kan inträffa då hinder är för smala som till exempel stolsben men
också om objektet i höjdled är över eller under sensorerna.
Anledningen till valet av processor var att ett utvecklingskort för PIC16F877A fanns
att tillgå. All utrustning kunde därmed testas innan tillverkningen av det egna styrkortet.
En krets som annars hade varit mycket lämplig för ändamålet hade varit PIC18F4550,
eftersom den har mer internt minne och stöd för USB 2.0-gränssnittet.
Några närmare beräkningar har inte behövts göras för att se om processorn klarar av
kraven som ställts, då leverantören av robotbilen även säljer styrkort som har bestyckats
med en OOPIC [8]. OOPIC är en krets som är baserad på en PIC16F877A och den har
många färdiga funktioner för att styra robotar. OOPIC-kretsen programmeras aldrig om
eftersom all egen programkod läggs in på en EEPROM-krets.
Problem som uppstått under arbetets gång är relaterat till servofunktionen. Det har
grundats på tankefel gällande inställningar för timern och avbrottsfunktionen. Ett antal
problem för avbrottsfunktionen inträffade också i Labview-delen, då en funktion för
inläsning av data från RS232-porten användes. Det sistnämnda problemet uppkom då
tre funktioner kördes samtidigt och styrdes från Labview, avbrottsrutinen, ultraljudet
och kommunikationen för RS232. Kommunikationsproblemen till robotbilen från
datorn uppkom bara när bilen styrdes från Labview och inte ifrån Hyper-Terminalen.
Servofunktionen fick därför ändras om och resulterade i att servopositionerna inte
riktigt fördelades jämt över 180 grader. En lösning på det här problemet skulle kunna
vara att höja klockfrekvensen på PIC-processorn till 20 MHz istället för 4 MHz som
processorn för närvarande jobbar med.
6 Slutdiskussion
Det är mycket lämpligt att komplettera roboten med fler sensorer, främst IR-sensorer då
avläsningen sker snabbare än med ultraljud, men också för att de är lättare att
implementera och utnyttja för hastighetsreglering. En annan funktion som skulle
underlätta är att bygga in stöd för trådlös kommunikation för att på så sätt kunna styra
robotbilen via Labview utan anslutningskabel men också för att kunna avlusa bilen med
avlusningsprogrammet när den är i drift på ett smidigare vis.
14
7 Referenser
[1] Lynxmotion (2007-05-26).
http://www.lynxmotion.com/
[2] PIC16F877A Datablad (2007-05-26).
http://ww1.microchip.com/downloads/en/DeviceDoc/39582b.pdf
[3] PCWH Compiler Maunal (2007-05-26).
http://www.ccsinfo.com/downloads/ccs_c_manual.pdf
[4] Martin Fred, Robotic Explorations: A Hands-on Introduction to Engineering,
Prentice Hall, New Jersey, 2001, ISBN 0-13-089568-7
[5] Perl: Exempel kod. (2007-05-26).
http://www.perl.com/pub/a/1999/10/perltk/index.html
[6] O´Relilly´s bookshelf: Referens Libary (2007-05-26).
http://hell.org.ua/Docs/oreilly/
[7] National Instruments – Labview (2007-05-26).
http://www.ni.com/labview/
[8] Totalrobots (2007-05-26).
http://www.totalrobots.com/
[9] Styrkrets Samsung KS0066U (2007-05-26).
http://www.ortodoxism.ro/datasheets/SamsungElectronic/mXuuzvr.pdf
[10] MAX232 Datablad (2007-05-26).
http://rocky.digikey.com/WebLib/Texas%20Instruments/Web%20data/MAX232,232I.p
df
15
8 Bilagor
8.1 Automatisk styrning av robotbil.
8.1.1 Upp1.h
#ifndef uppg1 //Defininerar Variabler och funktioner om de inte blivit definerade innan #define uppg1
#include <16F877A.h> #device adc=8
#use delay(clock=4000000)
#fuses NOWDT,XT, NOPUT, NOPROTECT, NODEBUG, BROWNOUT, NOLVP, NOCPD, NOWRT #use rs232(baud=9600,parity=N,xmit=PIN_C6,rcv=PIN_C7,bits=8)
/*Konstanter till Servot och Ultraljudet*/ #define INTS_PER_SECOND 3840 #define INTS_PER_MILLISECOND 2 #define SERVO_CYCLE 20 #define NO_OF_ACTIONS 1200 #define STATE0 0 #define STATE1 1 #define STATE2 2 #define STATE3 3 #define STATE4 4 #define STATE5 5 #define STATE6 6 #define STATE7 7 #define L_TO_R true #define R_TO_L false #define GO true /*Adressering av portar*/ #byte port_d = 8 #byte port_c = 7 #byte port_e = 4 /*Variabler för INTERRUPT*/
byte seconds=0,milli_seconds=0; // A running seconds counter
long int int_count=INTS_PER_SECOND; // Number of interrupts left before a second has elapsed byte int_millicount=INTS_PER_MILLISECOND; /*Sträng för utskrift till RS232*/ char strang[90]; /*Variabler för Hastighet*/ byte LeftSpeed=0,RightSpeed=0; byte IR_Left=0,IR_Right=0,IR_Back=0; byte IR_L_dir=1,IR_R_dir=1; byte Left_Dir,Right_Dir; byte last_left_dir,last_right_dir;
/*Variabler som tillhör Ultrasonic och Servo*/ byte US_State = STATE0,US_state2=STATE0; byte action = 0;
long actioncounter = 0; byte servo_array[] = {0,4}; byte servo_array_pointer = 0; byte Servo_High=0;
byte servo_state = GO;
long D1=0,D2=0,D3=0,D4=0,D5=0,D6=0,DC=0; boolean Servo_Home = true;
boolean Servo_direction = L_TO_R; char servodir = 'A';
16
/*Funktioner*/ void init();
byte read_analog(byte channel); int UltraSonic(Void);
void UltraSonic_Read_Pos();
void pwm(int Duty_Left,Duty_Right);
void Direction_Control();//boolean Direction_Control(Int IR_Left,IR_Right,IR_Back); void print(char *vector);
void Meny(void); long Speed_Control(); void Read_IR(void); void init(){
seconds = 0;
setup_timer_0( RTCC_INTERNAL | RTCC_DIV_1 ); setup_adc_ports(AN0_AN1_AN2_AN3_AN4); setup_adc(ADC_CLOCK_INTERNAL); setup_psp(PSP_DISABLED); setup_spi(FALSE); setup_timer_1(T1_INTERNAL); setup_ccp1(CCP_PWM); setup_ccp2(CCP_PWM); setup_comparator(NC_NC_NC_NC); setup_vref(FALSE);
set_tris_c(0x00); //Sätter PortC till utgångar för styrning av motor (C0-C5), C6 &C7 används till RS232.
set_tris_d(0x02); //Sätter portD till utgång för syrning av UltraSonic (D0-D1). //lcd_init(); //initierar LCD
//lcd_clear();
set_rtcc(0); //Startar realtidsklocka som används till utskrivt och Servot. enable_interrupts(INT_RTCC);
enable_interrupts(GLOBAL); }
17
8.1.2 Upg1.c
#include <upg1.h> #include <peripheral.c>
#int_rtcc // This function is called every time
void clock_isr() { // the RTCC (timer0) overflows (255->0). if(--int_millicount==0) { if (action == 1 || Servo_Home==true){ if(milli_seconds < Servo_High+1){ Output_High(PIN_E2); }else{ Output_Low(PIN_E2); }if(actioncounter>=1200){ Servo_Home=False; } } milli_seconds++; if (milli_seconds > SERVO_CYCLE){ milli_seconds = 0; }if(servo_state == GO ){ actioncounter++;
}if (actioncounter > NO_OF_ACTIONS){ action = 0;
actioncounter = NO_OF_ACTIONS+1;
}if((actioncounter>1200) && (Servo_Home !=True)){ US_state = STATE7; // Stay in STATE6 until next second }else if((actioncounter>1000) && (Servo_Home !=True)){ US_state = STATE6;
}else if((actioncounter>900) && (Servo_Home !=True)){ US_state = STATE5;
}else if((actioncounter>800) && (Servo_Home !=True)){ US_state = STATE4;
}else if((actioncounter>550) && (Servo_Home !=True) && (actioncounter<650)){ US_state = STATE3;
}else if((actioncounter>300) && (Servo_Home !=True)){ US_state = STATE2;
}else if((actioncounter>200) && (Servo_Home !=True)){ US_state = STATE1;
}else{
US_state = STATE0; }
int_millicount=INTS_PER_MILLISECOND; }if(--int_count==0) { // per second. ++seconds; int_count=INTS_PER_SECOND; if ((US_State==STATE7)){ US_state=STATE0; if (Servo_Direction == L_TO_R){ Servo_Direction = R_TO_L; }else{Servo_Direction = L_TO_R;} actioncounter = 0; Servo_High = servo_array[servo_array_pointer++]; if (servo_array_pointer > 1){ servo_array_pointer = 0; }
action = (action + 1)&1; } if (seconds >= 59){ seconds = 0; } } }
18
void main() { init(); port_d=0x00; while(1){ UltraSonic_Read_Pos(); Read_IR(); Direction_Control();//IR_Left,IR_Right,IR_Back,IR_L_dir,IR_R_dir Speed_Control();//IR_Left,IR_Right,IR_Back,IR_L_dir,IR_R_dir Set_Speed();//LSpeed,RSpeed,IR_L_dir,IR_R_dir } // end while(1) } // end main19
8.1.3 Peripheral.c
#include <upg1.h> #define INT_LENGTH 10 #define FORWARD 1 #define BACKWARD 0#define MIN_US_DISTANCE 18 //Avstånd i cm. #define Max_US_DISTANCE 30
#define MAX_IR_DISTANCE 65 //Ju högre värde dessto närmare roboten. #define MIN_IR_DISTANCE 45
#define MAX_SPEED 100 #define REAL_MAX_SPEED 50 #define MIN_SPEED 60
#define BACK_SPEED 100
void print(char *vector){ //Skriver strängar till RS232. int i = 0;
char vcpy[80];
strcpy(vcpy, vector); //Kopierar vår pekare till en variabel. while(vcpy[i]!= '\0' ){
putc(vector[i++]); }
}
//UltraSoic, Triggar på D0 och läser på D1 int UltraSonic(Void){
long Distance=0; output_high(PIN_D0);
delay_us(10); //Måste vara minst 10us. output_low(PIN_D0);
while(!input(PIN_D1)); //Stannar här tills det inte finns någon signal på US. set_timer1(0); //Nollställer timer1
while(input(PIN_D1)); //Stannar så länge som man har signal på ingången. Distance = get_timer1(); //läser av Timer värdet.
Distance=Distance/58; //Räknar om tiden till cm skalfator 58 vid 4MHz 300 vid 20MHz. Distance=(int)Distance; //Omvandlar long till Integer.
Return Distance; }
//Read AD-Channels and print it on LCD. byte read_analog(byte Channel){
int Analog_Value;
SET_ADC_CHANNEL(Channel); //Tar emot värde för vilken ingång som ska läsas av. analog_value = read_adc(ADC_START_AND_READ); //Läser av ingången.
return Analog_Value; }
void pwm(int Duty_Left, Duty_Right){ /*
if((Right_Dir==BACKWARD) && (Left_Dir==BACKWARD)){ Duty_Left=100; Duty_Right=100; }*/ if(Servo_Home==true){ Duty_Left=0; Duty_Right=0; }
setup_timer_2(T2_DIV_BY_1,51,2); //Sätter upp Timer 2 för få rätt PWM. set_pwm1_duty(Duty_Left); //PWM signal för Vänster motor
set_pwm2_duty(Duty_Right); //PWM signal för höger motor. }
20
/*Funktion som styr riktningen på motorena fram eller bak, är beroende av värden som fås från sensorena*/
void Direction_Control(){
//IR_Left,IR_Right,IR_Back,IR_L_dir,IR_R_dir
if ((Last_Left_Dir == FORWARD) && (Last_Right_Dir == FORWARD) ){ if((D1>MIN_US_DISTANCE)&&(D2>MIN_US_DISTANCE)&&(D5>MIN_US_DISTANCE)&&(D6 >MIN_US_DISTANCE)){ Left_Dir = FORWARD; Right_Dir = FORWARD; } else if ((D5<MIN_US_DISTANCE)||(D6<MIN_US_DISTANCE)){ Left_Dir = FORWARD; Right_Dir = BACKWARD; } else if ((D1<MIN_US_DISTANCE)||(D2<MIN_US_DISTANCE)){ Left_Dir = BACKWARD; Right_Dir = FORWARD; }
if(((IR_Left>MIN_IR_DISTANCE) && (IR_Right>MIN_IR_DISTANCE)) || (DC<10)){ Left_Dir = BACKWARD; Right_Dir = BACKWARD; } else if(IR_Left>MIN_IR_DISTANCE){ Left_Dir = FORWARD; Right_Dir = BACKWARD; } else if(IR_Right>MIN_IR_DISTANCE){ Left_Dir = BACKWARD; Right_Dir = FORWARD; }
}else if (Last_Left_Dir != Last_Right_Dir){
if((IR_Left>MAX_IR_DISTANCE) && (IR_Right>MAX_IR_DISTANCE)){ Left_Dir = BACKWARD; // Go backward
Right_Dir = BACKWARD; if(D1<MIN_US_DISTANCE){
Left_Dir = BACKWARD; // Go backward Right_Dir = FORWARD;
}
if(D6<MIN_US_DISTANCE){
Left_Dir = BACKWARD; // Go backward Right_Dir = FORWARD;
} }
else if((IR_Left<MIN_IR_DISTANCE) && (IR_Right<MIN_IR_DISTANCE)){ Left_Dir = FORWARD;
Right_Dir = FORWARD; } }
else{//Vi åker bakåt kollar om vi behöver åka framåt. if (IR_Back > MAX_IR_DISTANCE){
Left_Dir = FORWARD; // Go Forward Right_Dir = FORWARD; } } last_left_dir=Left_dir,last_right_dir=Right_dir; // return (Left_Dir*16)+Right_Dir; }
21
void Set_Speed(){ //LeftSpeed,RightSpeed,Left_dir,Right_dir byte LeftSpeed,RightSpeed,L_Dir,R_Dir pwm(LeftSpeed,RightSpeed); if (Left_Dir==1){ output_High(PIN_C0); output_Low(PIN_C3); }else{ output_Low(PIN_C0); output_High(PIN_C3); } if (Right_Dir==1){ output_High(PIN_C4); output_low(PIN_C5); }else{ output_Low(PIN_C4); output_High(PIN_C5); } }
long Speed_Control(){ //IR_Left,IR_Right,IR_Back,IR_L_dir,IR_R_dir static long LeftSpeedArray[10];
static long RightSpeedArray[10]; static byte arraypointer = 0; int i;
if (arraypointer >= INT_LENGTH ){ arraypointer = 0;
}
if (IR_L_Dir){ // Go Forward
LeftSpeedArray[arraypointer] = Abs(MAX_SPEED - IR_Left); }
else { // Go Backward;
LeftSpeedArray[arraypointer] = Abs(MAX_SPEED - IR_Back); }
if (IR_R_Dir){ // Go Forward
RightSpeedArray[arraypointer] = Abs(MAX_SPEED - IR_Right); }
else { // Go Backward;
RightSpeedArray[arraypointer] = Abs(MAX_SPEED - IR_Back); }
for (i = 0; i < INT_LENGTH; i++){ LeftSpeed += LeftSpeedArray[i]; RightSpeed += RightSpeedArray[i]; } RightSpeed = RightSpeed/INT_LENGTH; LeftSpeed = LeftSpeed/INT_LENGTH; if (LeftSpeed > MAX_SPEED){ LeftSpeed = MAX_SPEED; } if (RightSpeed > MAX_SPEED){ RightSpeed = MAX_SPEED; } if (LeftSpeed < MIN_SPEED){ LeftSpeed = MIN_SPEED; } if (RightSpeed < MIN_SPEED){ RightSpeed = MIN_SPEED; } arraypointer++; }
22
Void UltraSonic_Read_Pos(void){
if (US_state==STATE0 && (US_state2 != STATE0)){ US_state2 = STATE0;
if(Servo_Direction == L_TO_R){ D1=UltraSonic();
}else D6=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE1 && (US_state2 != STATE1)){ US_state2 = STATE1;
if(Servo_Direction == L_TO_R){ D2=UltraSonic();
}else D5=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE2 && (US_state2 != STATE2)){ US_state2 = STATE2;
if(Servo_Direction == L_TO_R){ D3=UltraSonic();
}else D4=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE3 && (US_state2 != STATE3)){ US_state2 = STATE3;
if(Servo_Direction == L_TO_R){ DC=UltraSonic();
}else DC=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE4 && (US_state2 != STATE4)){ US_state2 = STATE4;
if(Servo_Direction == L_TO_R){ D4=UltraSonic();
}else D3=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE5 && (US_state2 != STATE5)){ US_state2 = STATE5;
if(Servo_Direction == L_TO_R){ D5=UltraSonic();
}else D2=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE6 && (US_state2 != STATE6)){ US_state2 = STATE6;
if(Servo_Direction == L_TO_R){ D6=UltraSonic();
}else D1=UltraSonic();
// sprintf(strang, "I: State:%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10); // print(strang);
}else if (US_state==STATE7 && (US_state2 != STATE7)){ US_state2 = STATE7;
sprintf(strang, "I: State:STATE%d S-Dir:%c AC:%ld %c%c",US_state,servodir,ActionCounter,13,10);
print(strang);
//Skriver ut värden från ultraljudet vänster och höger för sig.
sprintf(strang, "L: US1:%ld US2:%ld US3:%ld %c %c",D1,D2,D3,13,10); print(strang);
sprintf(strang, "R: US4:%ld US5:%ld US6:%ld %c %c",D4,D5,D6,13,10); print(strang);
sprintf(strang, "C: US_Center: %ld MAXSPEED %d MINSPEED %d %c %c",DC,MAX_SPEED,MIN_SPEED,13,10);
23
print(strang);
//Skriver ut riktning och hastighet som är beroende på värden från IR.
sprintf(strang, "L: IR_Left:%d Left_Dir:%d LSpeed:%d%c%c",IR_Left,Left_Dir,LeftSpeed,13,10); print(strang);
sprintf(strang, "R: IR_Right:%d Right_Dir:%d RSpeed:%d%c%c",IR_Right,Right_Dir,RightSpeed,13,10); print(strang);
//Skriver ut värden som behövs för att backa.
sprintf(strang, "B: IR_Back:%d S-Dir:%c %c%c",IR_Back,servodir,13,10); print(strang);// Skriver sträng till RS232.
if (Servo_Direction == true){ servodir='L';} else {servodir='R';}
} }
void Read_IR(void){ IR_Left=Read_Analog('0');
IR_Right=Read_Analog('1')+4; //4 justerar skillnaden mellan IR-Sensorena i fronten. IR_Back=Read_Analog('2'); if (IR_Left>100){ IR_Left = 100; } if (IR_Right>100){ IR_Right = 100; } if (IR_Back>100){ IR_Back = 100; } }
24
8.1.4 LCD4.C
/*DISPLAY GDM1602A with chip from Samsung (KS0066U)*/ void LCD_enable(void);
void lcd_test();
void lcd_write_string(char *str); void lcd_line_pos(int line, int pos); struct lcd_map{
int Data : 4; //PIN B0-B3 boolean Enable; //PIN B4 boolean RS; //PIN B5 int unused : 2; }lcd; #byte LCD = 6 void lcd_init(void){ //LCD Power ON set_tris_b(0x00); LCD.Data=0; LCD.Enable=0; LCD.RS=0; delay_ms(39); //Function Set LCD.Data=0b0010;//MSB LCD_enable(); LCD.Data=0b1000;//LSB LCD_enable(); //Display Control delay_us(39); LCD.Data=0b0000;//MSB LCD_enable(); LCD.Data=0b1111;//LSB LCD_enable(); //Display Clear delay_us(39); LCD.Data=0b0000;//MSB LCD_enable(); LCD.Data=0b0001;//LSB LCD_enable();
//Entry Mode Set delay_us(39); LCD.Data=0b0000;//MSB LCD_enable(); LCD.Data=0b0110;//LSB LCD_enable(); }
void LCD_Enable(void){ // Toggle Enable LCD.Enable=1;
delay_cycles(1); LCD.Enable=0; }
25
void lcd_clear(){
//Tömmer LCD och sätter Cursoren på position 1 på första raden. LCD.Data = 0b0000; LCD_Enable(); LCD.Data = 0b0001; LCD_Enable(); delay_us(1530); } //Test AV LCD utskrivt. void lcd_write_char(char c){ delay_us(43); LCD.RS=1; LCD.Data=(c&0xf0)>>4;//MSB LCD_enable(); LCD.Data=c&0x0f;//LSB LCD_enable(); LCD.RS=0; } /*Skriver ut en sträng på displayen*/ void lcd_write_string(char *vector){ int i = 0;
char vcpy[16];
strcpy(vcpy, vector); //Kopierar vår pekare till en variabel. while(vcpy[i]!= '\0' ){
lcd_write_char(vector[i]); i ++;
if (i==16){ int j;
for (j=0;j<24;j++){ // Write 24 blanks to get to beginning of next line lcd_write_char('x');
} } } }
void lcd_line_pos(int line, int pos){ //Rad2 på Display delay_us(39); if (line == 2){ lcd.data = 0b1100; LCD_enable(); lcd.data = 0b0000+pos; LCD_enable(); } //Rad1 på Display else{ lcd.data = 0b0100; LCD_enable(); lcd.data = 0b0000+pos; LCD_enable(); } }
26
8.2 Avlusningsprogram
#! perl my $version = "1.0"; #use strict; use Win32::SerialPort; use Tk; use Tk::Dialog; use Tk::DialogBox; #use Tk::FileDialog; use Tk::Toolbar; use Tk::JComboBox; use Tk::Frame; use Tk::TextUndo; use Tk::Text; use Tk::TextUndo; use Tk::Scrollbar; use Tk::Menu; use Tk::Menubutton; use Tk::Adjuster; use Tk::Canvas; use Tk::NoteBook; use Tk::ProgressBar; my $PortName = "COM1"; my $quiet; my $Configuration_File_Name = 'testconf.cfg'; print "Trying to connect to $PortName....\n";my $PortObj = new Win32::SerialPort ($PortName, $quiet) || die "Can't open $PortName: $^E\n"; # $quiet is optional
print "\n\nConnected to $PortName\n\n"; $PortObj->user_msg("ON"); $PortObj->databits(8); $PortObj->baudrate(9600); $PortObj->parity("none"); $PortObj->stopbits(1); $PortObj->handshake("none"); $PortObj->buffers(4096, 4096);
$PortObj->write_settings || undef $PortObj; $PortObj->save($Configuration_File_Name);
$PortObj->are_match('NL', 'OKW', 'OKH', 'START', 'NEWOK'); $mw_X_size = 800; $mw_Y_size = 600; my $MW = MainWindow->new; my ($window,$frame,$txt); my ($book,$raisetime,$tab1,$tab2,$tab8); my ($leftwindow_text,$leftwindow_graph,$rightwindow_text,$rightwindow_graph); my @color = ("blue","red","green","yellow"); my $rspeed,$lspeed; my $x1 = 1; $x2 = 2; my $r_y1=0;$r_y2=0;$l_y1=0;$l_y2=0; my $minspeed,$maxspeed;
my $left_dir=1,$right_dir=1; # 1 = FoRWARD, -1 = BACKWARD my $y_offset = 300;
my $do_once;
27
create_screen();
$PortObj->close || die "failed to close"; undef $PortObj; exit; sub Read_From_COM(){ my ($line,$oldline,$count,$result,$in); while (1){ $PortObj->read_interval(100); while (1){
($count, $result) = $PortObj->read(1); $line = $line . $result;
last if ($line =~ m/\n/); }
#$line = "R: IR_Left:16 IR_L_Dir1 RSpeed:64"; # if ($line !~ $oldline){
# if ($line =~ m/STATE:3|STATE:6/){
chomp $line;
$line =~ s/\x0a+//g; # Remove all CR in line 0x0A $line =~ s/\x0d+//g; # # # print "$line\n"; if ($line =~ m/^(L|R|C|B|I):/){ $side = $1; if ($side =~ m/L/){ $leftwindow_text->insert('end',"$line\n",'left');
$leftwindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
if ($line =~ m/Speed:(\d+)/){ $speed = $1;
$x2 = $x1; $x1++;
$l_y2 = $l_y1;
$l_y1 = $y_offset - (($speed)*$scale*$left_dir);
$l_y2 = $l_y1 if (!$l_y2); #Make sure both y1 and y2 has a value $x2 = $x1 if (!$x2); #Make sure both x1 and x2 has a value
# print "y_offset=$y_offset l_y1=$l_y1, l_y2=$l_y2 left_dir=$left_dir\n"; $speedwindow_graph->createLine($x1,$l_y1,$x2,$l_y2,-fill => 'red',-tags => 'left_speed');
}
if ($line =~ m/Left_Dir:(\d+)/){
$left_dir = 1 if ($1 == 1); #Direction is forward $left_dir = -1 if ($1 == 0); #Direction is backward # print "left_dir=$left_dir\n";
$directionwindow_text->insert('end',"($left_dir,",'left');
$directionwindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
draw_left_direction(); }
}elsif (($side =~ m/R/)){
$rightwindow_text->insert('end',"$line\n",'right');
$rightwindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
if ($line =~ m/Speed:(\d+)/){ $speed = $1;
$x2 = $x1; $x1++;
$r_y2 = $r_y1;
$r_y1 = $y_offset - (($speed)*$scale*$right_dir);
$r_y2 = $r_y1 if (!$r_y2); #Make sure both y1 and y2 has a value $x2 = $x1 if (!$x2); #Make sure both x1 and x2 has a value
28
# print "y_offset=$y_offset r_y1=$r_y1, r_y2=$r_y2 right_dir=$right_dir\n"; $speedwindow_graph->createLine($x1,$r_y1,$x2,$r_y2,-fill => 'black',-tags => 'right_speed');
}
if ($line =~ m/Right_Dir:(\d+)/){
$right_dir = 1 if ($1 == 1); #Direction is forward $right_dir = -1 if ($1 == 0); #Direction is backward # print "right_dir=$right_dir\n";
$directionwindow_text->insert('end',"$right_dir)",'right'); if (($left_dir == 1) and ($right_dir == 1)){
$directionwindow_text->insert('end',"FORWARD",'right'); }elsif(($left_dir == -1) and ($right_dir == -1)){
$directionwindow_text->insert('end',"REVERSE",'right'); }elsif(($left_dir == 1) and ($right_dir == -1)){
$directionwindow_text->insert('end',"TURN RIGHT",'right'); }elsif(($left_dir == -1) and ($right_dir == 1)){
$directionwindow_text->insert('end',"TURN LEFT",'right'); }
$directionwindow_text->insert('end',"\n",'right');
$directionwindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
draw_right_direction(); } } if (($side =~ m/C/)){ if ($line =~ m/MAXSPEED\s+(\d+)\s+MINSPEED\s+(\d+)/){ $maxspeed = $1; $minspeed = $2; if (!$do_once){
$speedwindow_graph->createLine(0,$y_offset-$maxspeed*$scale,$mw_X_size,$y_offset-$maxspeed*$scale,-fill => 'blue',-tags => 'max_speed');
$speedwindow_graph->createLine(0,$y_offset-$minspeed*$scale,$mw_X_size,$y_offset-$minspeed*$scale,-fill => 'blue',-tags => 'min_speed');
$speedwindow_graph->createLine(0,$y_offset+$maxspeed*$scale,$mw_X_size,$y_offset+$maxspeed*$scale,-fill => 'blue',-tags => 'max_speed'); # When going backwards
$speedwindow_graph->createLine(0,$y_offset+$minspeed*$scale,$mw_X_size,$y_offset+$minspeed*$scale,-fill => 'blue',-tags => 'min_speed'); #When going backwards
$speedwindow_graph>createText(50,$y_offset+$maxspeed*$scale10, -text=>"MAX REVERSE",-fill=>'blue'); $speedwindow_graph>createText(50,$y_offset$maxspeed*$scale10, -text=>"MAX FORWARD",-fill=>'blue'); $speedwindow_graph>createText(50,$y_offset+$minspeed*$scale10, -text=>"MIN REVERSE",-fill=>'blue'); $speedwindow_graph>createText(50,$y_offset$minspeed*$scale10, -text=>"MIN FORWARD",-fill=>'blue'); $speedwindow_graph->createLine(0,$y_offset,$mw_X_size,$y_offset,-fill => 'green',-tags => 'y-offset'); $do_once = 1; } } $centrewindow_text->insert('end',"$line\n",'centre');
$centrewindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
}elsif (($side =~ m/B/)){
$backwindow_text->insert('end',"$line\n",'back');
$backwindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
}elsif (($side =~ m/I/)){
29
$infowindow_text->yview(moveto => 1.1); # Automatically scroll to bottom of text (1.1 = bottom, 0.0 = top)
} } if ($x > $mw_X_size){ On_Clear(); $x = 0; } &update_gui; # $box1->insert('end', $line);box1->pack; # $mw->update; # } # } $oldline = $line; $line = (); } } sub update_gui{ $MW->update; } sub create_screen() {
$MW->title("Robot Debug tool $version by Martin Aldrin "); $MW->iconname('frog');
my $menubar = build_menubar;
my $toolbar = $MW->ToolBar(qw/-movable 1 -side top/); $toolbar->ToolButton (-text => 'Clear',
-tip => 'Clearing windows', -command => sub {OnClear()} );
$toolbar->ToolButton (-text => 'Open', -tip => 'Opens a new log file', -command => sub {Open_File()} );
$toolbar->ToolButton (-text => 'Save',
-tip => 'Save the result to a file', -command => sub {Save_File()} );
$toolbar->ToolButton (-text => 'Quit', -tip => 'Quit',
-command => sub {OnExit()} ); $toolbar->ToolButton (-text => 'Pause', -tip => 'Pause',
-command => sub {OnPause()} ); # $toolbar->ToolLabel (-text => 'A Label'); # $toolbar->Label (-text => 'Another Label'); # $toolbar->ToolLabEntry(-label => 'A LabEntry', # -labelPack => [-side => "left", # -anchor => "w"]);
my $book = $MW->NoteBook()->pack( -fill=>'both', -expand=>1 ); $tab1 = $book->add( "Sheet 1", -label=>"LEFT & RIGHT"); # $tab2 = $book->add( "Sheet 2", -label=>"RIGHT" );
$tab3 = $book->add( "Sheet 3", -label=>"CENTRE & BACK" ); # $tab4 = $book->add( "Sheet 4", -label=>"BACK" );
$tab5 = $book->add( "Sheet 5", -label=>"SPEED" ); $tab6 = $book->add( "Sheet 6", -label=>"DIRECTION" ); $tab7 = $book->add( "Sheet 7", -label=>"INFO" );
30
$tab1->Label( -textvariable=>\'Left & Right Side Data')->pack(-expand=>1); # $tab2->Label( -textvariable=>\'Right Side Data')->pack( -expand=>1); $tab3->Label( -textvariable=>\'Centre & Back Data')->pack( -expand=>1); # $tab4->Label( -textvariable=>\'Back Data')->pack( -expand=>1);
$tab5->Label( -textvariable=>\'Speed')->pack( -expand=>1); $tab6->Label( -textvariable=>\'Direction')->pack( -expand=>1); $tab1->pack; # $tab2->pack; $tab3->pack; # $tab4->pack; $tab5->pack; $tab6->pack; $tab7->pack;
$leftwindow_text = $tab1->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'15', -scrollbars=>'e');
$leftwindow_text->pack(-expand=>'yes', -fill=>'both');
$rightwindow_text = $tab1->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'15', -scrollbars=>'e');
$rightwindow_text->pack(-expand=>'yes', -fill=>'both');
$centrewindow_text = $tab3->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'15', -scrollbars=>'e');
$centrewindow_text->pack(-expand=>'yes', -fill=>'both');
$backwindow_text = $tab3->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'15', -scrollbars=>'e');
$backwindow_text->pack(-expand=>'yes', -fill=>'both');
$speedwindow_graph = $tab5->Canvas(-width => $mw_X_size, -height => $mw_Y_size); $speedwindow_graph->createText(20,10, -text=>"Left",-fill=>'red');
$speedwindow_graph->createText(60,10, -text=>"Right",-fill=>'black'); $speedwindow_graph->pack;
$directionwindow_text = $tab6->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'10', -scrollbars=>'e');
$directionwindow_text->pack(-expand=>'yes', -fill=>'both');
$directionwindow_graph = $tab6->Canvas(-width => $mw_X_size, -height => $mw_Y_size); $directionwindow_graph->pack;
$infowindow_text = $tab7->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', -setgrid=>'true', -height=>'15', -scrollbars=>'e');
$infowindow_text->pack(-expand=>'yes', -fill=>'both');
# $preferenceswindow_text = $tab8->Scrolled('Text', -relief=>'sunken', -borderwidth=>'2', # -setgrid=>'true', -height=>'20', -scrollbars=>'e');
# $preferenceswindow_text->pack(-expand=>'yes', -fill=>'both'); # $tab8->Entry(-textvariable => \$minimumscheds)
# ->pack(-expand => 1, # -fill => 'x');
# $tab8->LabEntry(-label => "Minimum number of schedulings per user for average calculation", # -labelPack => [-side => "left", -anchor => "w"],
# -width => 5,
# -textvariable => \$minimumscheds)->pack(-side => "top", # -anchor => 'nw');
# $tab8->LabEntry(-label => "Number of SCCH-codes per TTI", # -labelPack => [-side => "left", -anchor => "w"],
# -width => 5,
# -textvariable => \$numberofscchcodes)->pack(-side => "top", # -anchor => 'nw');
31
$MW->Entry(-textvariable => \$PortName) ->pack(-expand => 1, -fill => 'x'); $book->pack; $book->update; # Open_File(); Read_From_COM(); } sub build_menubar {# Create the menubar and File and Quit menubuttons. Note # that the cascade's menu widget is automatically created.
my $menubar = $MW->Menu(-menuitems => &menubar_menuitems() ); $MW->configure(-menu => $menubar); } # end build_menubar sub menubar_menuitems { return [ map ['cascade', $_->[0], -tearoff=> 0, -menuitems => $_->[1]],
# make sure you put the parens here because we want to # evaluate and not just store a reference
['~File', &file_menuitems()], ['~Help', &help_menuitems()], ]; } sub file_menuitems { return [
[qw/command ~Open -accelerator Ctrl-o/,-command=>[\&Open_File]], [qw/command ~Save -accelerator Ctrl-s/,-command=>[\&Save_File]], [qw/command E~xit -accelerator Ctrl-q/,-command=>[\&OnExit]], ]
}
sub Open_File() {
my @types = (["Log files", '.log'],["Text files", '.txt'],["All Files", "*"] ); $logfile=$MW->getOpenFile(-filetypes => \@types, -initialfile=> 'Logfile', -defaultextension => '.log'); if ($logfile){ close_logfile(); OnClear();
open (INFILE, $logfile) or die "Can't open $logfile\n"; $execute = 1;
# $number_of_lines = analyse_file($logfile); }
32
sub Save_File() {
my $exclusive_lock = 2; my $unlock_lock = 8;
my @types = (["Result files", '.res'],["Text files", '.txt'],["All Files", "*"] ); $resultfile = $MW->getSaveFile(-filetypes => \@types,
-initialfile=> 'Result', -defaultextension => '.res'); if ($resultfile){
print "Saving File....\n";
open (OUTFILE, ">$resultfile") or die "Can't create $resultfile\n"; flock(OUTFILE,$exclusive_lock);
print (OUTFILE "===============\n");
my $selected_text = $leftwindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
print (OUTFILE "===================\n"); my $selected_text = $rightwindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
print (OUTFILE "===================\n");
my $selected_text = $centrewindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
print (OUTFILE "===================\n"); my $selected_text = $backwindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
print (OUTFILE "===================\n");
my $selected_text = $directionwindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
print (OUTFILE "===================\n"); my $selected_text = $infowindow_text->get('0.0', 'end'); print (OUTFILE "$selected_text");
close (OUTFILE); flock(OUTFILE,$unlock_lock); print "Done!\n" } } sub help_menuitems { return [
[qw/command ~about -accelerator Ctrl-a/,-command=>[\&OnAbout]], ];
}
sub OnExit {
print STDOUT "Bye bye\n" if (!$noprint); exit;
33
sub OnAbout {
my $about = $MW->DialogBox(-title=>"Robot Debug tool v$version",-buttons=>["OK"] );
$about->add('Label',-anchor => 'w', -justify => 'left',-text => qq(Robot Debug tool v$version \n by \n Martin Aldrin\n\n Please enjoy!!!))->pack;
$about->Show; }
sub OnPause {
my $pause = $MW->DialogBox(-title=>"Pause updating",-buttons=>["CONTINUE"] ); $pause->add('Label',-anchor => 'w', -justify => 'left',-text => qq(Press CONTINUE to continue execution))->pack;
$pause->Show; }
sub OnClear {
$leftwindow_text->delete('0.0','end'); # Radera allt från början till slut i fönstret $rightwindow_text->delete('0.0','end'); $centrewindow_text->delete('0.0','end'); $backwindow_text->delete('0.0','end'); $rightwindow_text->delete('0.0','end'); $directionwindow_text->delete('0.0','end'); $directionwindow_graph->delete('L-dir'); $directionwindow_graph->delete('R-dir'); $infowindow_text->delete('0.0','end'); # $preferenceswindow_text->delete('0.0','end');
$speedwindow_graph->delete('speed'); #Radera den graf som heter speed } sub close_logfile() { close INFILE; } sub analyse_file() { # my $logfile = @_[0]; # print "Analysing file...\n";
# open (ANFILE, "<$logfile") or die "Can't open $logfile\n"; # my $lines = 0; # while (<ANFILE>) { # my $line = $_; # if ($line =~ m/^\[/){ # $lines++; # } # } # close (ANFILE); # print "Done!\n"; # return $lines; } sub draw_left_direction() { $directionwindow_graph->delete('L-dir');
$directionwindow_graph->createLine(100,100,100,200,-fill => 'blue',-tags => 'L-dir'); if ($left_dir == 1){
$directionwindow_graph->createLine(70,130,100,100,-fill => 'blue',-tags => 'L-dir'); $directionwindow_graph->createLine(100,100,130,130,-fill => 'blue',-tags => 'L-dir'); }else{
34
$directionwindow_graph->createLine(100,200,130,170,-fill => 'blue',-tags => 'L-dir'); }
}
sub draw_right_direction() {
$directionwindow_graph->delete('R-dir');
$directionwindow_graph->createLine(300,100,300,200,-fill => 'blue',-tags => 'R-dir'); if ($right_dir == 1){
$directionwindow_graph->createLine(270,130,300,100,-fill => 'blue',-tags => 'R-dir'); $directionwindow_graph->createLine(300,100,330,130,-fill => 'blue',-tags => 'R-dir'); }else{
$directionwindow_graph->createLine(270,170,300,200,-fill => 'blue',-tags => 'R-dir'); $directionwindow_graph->createLine(300,200,330,170,-fill => 'blue',-tags => 'R-dir'); }
35
8.3 Mjukvara Robotbil för styrning från Labview.
8.3.1 Uppgift3.h
#include <16F877A.h> #device adc=8
#use delay(clock=4000000)
#fuses NOWDT,XT, NOPUT, NOPROTECT, NODEBUG, BROWNOUT, NOLVP, NOCPD, NOWRT #use rs232(baud=19200,parity=N,xmit=PIN_C6,rcv=PIN_C7,bits=8)
8.3.2 Uppgift3.c
#include <Uppgift3.h> /*Adressering av portar*/ #byte port_d = 8 #byte port_c = 7 #byte port_e = 4 #define MAX_SPEED 50 #define MIN_SPEED 34#define INTS_PER_SECOND 3840 // (20000000/(4*256*256)) 3840 = 1 sekund när man kör modulo 32 på interrupten #define INTS_PER_MILLISECOND 1 #define SERVO_CYCLE 40 #define NO_OF_ACTIONS 1200 #define STATE0 0 #define STATE1 1 #define STATE2 2 #define STATE3 3 #define STATE4 4 #define STATE5 5 #define STATE6 6 #define STATE7 7 #define L_TO_R true #define R_TO_L false #define GO true
/*Variabler för INTERRUPT*/ byte seconds=0,milli_seconds=0; long int int_count=INTS_PER_SECOND; byte int_millicount=INTS_PER_MILLISECOND;
36
/*Variabler som tillhör Ultrasonic och servofunktionen*/ byte US_State = STATE0,US_state2=STATE0;
byte action = 0; long actioncounter = 0; byte servo_array[] = {1,5}; byte servo_array_pointer = 0; byte Servo_High=0;
byte servo_state = GO;
long D0=0,D1=0,D2=0,D3=0,D4=0,D5=0,D6=0,DC=0; boolean Servo_Home = true;
boolean Servo_direction = L_TO_R; char servodir = 'A';
int i=0,start=1; char sign; char laban[50]; byte Left_Dir=1,Right_Dir=1; byte LeftSpeed=0,RightSpeed=0; char Labview[10]; /*Funktioner*/
void Print_RS232(char *vector); void Read_RS232();
void Call_Unit(void);
void Pwm(int Duty_Left, Duty_Right); void Set_Speed(byte Left_Dir,Right_Dir); byte Read_Analog(byte Channel); void UltraSonic_Read_Pos(); int UltraSonic(Void); void main() { setup_adc_ports(AN0_AN1_AN2_AN3_AN4); setup_adc(ADC_CLOCK_INTERNAL); setup_psp(PSP_DISABLED); setup_spi(FALSE); setup_timer_0(RTCC_INTERNAL|RTCC_DIV_1); setup_timer_1(T1_INTERNAL); setup_timer_2(T2_DISABLED,0,1); setup_comparator(NC_NC_NC_NC); setup_vref(FALSE); setup_ccp1(CCP_PWM); setup_ccp2(CCP_PWM);
set_tris_d(0x02); //Sätter portD till utgång för syrning av UltraSonic (D0-D1). set_rtcc(0); //Startar realtidsklocka som används till utskrivt och Servot. enable_interrupts(INT_RTCC); enable_interrupts(GLOBAL); port_d=0x00; while(1){ Read_RS232(); } }
37
//Utför olika åtgärder beroende på kommando som inkommit. void Call_Unit(void){ byte IR_Left=0,IR_Right=0,IR_Back=0; if(i >= 4){ if((labview[0]=='M') || (labview[0]=='m')){ if((labview[1]=='L') || (labview[1]=='l')){ Left_Dir=labview[2]-'0'; LeftSpeed=(labview[3]-'0')*10; LeftSpeed+=(labview[4]-'0'); if(LeftSpeed>50){ LeftSpeed=MAX_SPEED; }
if((LeftSpeed < 34) && (LeftSpeed !=0)){ LeftSpeed=MIN_SPEED;
}
sprintf(laban, " Left_Dir %d Left_Speed:%d",Left_Dir,LeftSpeed); Print_RS232(laban);
} // end if L
else if((labview[1]=='R') || (labview[1]=='r')){ Right_Dir=labview[2]-'0'; RightSpeed=(labview[3]-'0')*10; RightSpeed+=(labview[4]-'0'); if(RightSpeed>50){ RightSpeed=MAX_SPEED; }
if((RightSpeed < 34) && (RightSpeed !=0)){ RightSpeed=MIN_SPEED;
}
sprintf(laban, " Right_Dir %d Right_Speed:%d",Right_Dir,RightSpeed); Print_RS232(laban);
} // end if else if R
Set_Speed(Left_Dir,Right_Dir); } // end if labview[0]='M'
38
if(i >= 2){
if(((labview[0]=='I') || (labview[0]=='i')) && ((labview[1]=='R') || labview[1]=='r')){ if((labview[2]=='L') || (labview[2]=='l')){
IR_Left=Read_Analog('0');
sprintf(laban, " IR_Left:%d ",IR_Left); Print_RS232(laban);
} // end if L
else if((labview[2]=='R') || (labview[2]=='r')){
IR_Right=Read_Analog('1')+4; //4 justerar skillnaden mellan IR-Sensorena i fronten. sprintf(laban, " IR_Right:%d ",IR_Right);
Print_RS232(laban); } // end else if R
else if((labview[2]=='B') || (labview[2]=='b')){ IR_Back=Read_Analog('2');
sprintf(laban, " IR_Back:%d ",IR_Back); Print_RS232(laban);
} // end else if B
} //end if labview[0] 'I' and labview[1] 'R'
if(((labview[0]=='U') || (labview[0]=='u')) && ((labview[1]=='S') || labview[1]=='s')){ if(labview[2]=='1'){ Servo_High=2; }else if(labview[2]=='2'){ Servo_High=3; }else if(labview[2]=='3'){ Servo_High=4; }else if(labview[2]=='4'){ Servo_High=5; }else if(labview[2]=='5'){ Servo_High=6; }else if(labview[2]=='6'){ Servo_High=7; }else if(labview[2]=='7'){ Servo_High=8; }else if(labview[2]=='8'){ Servo_High=9; }else if(labview[2]=='9'){ D0=UltraSonic(); sprintf(laban, " US0: %ld ",D0); Print_RS232(laban); }else if(labview[2]=='0'){ Servo_High=0; }
}//end if labview[U] 'I' and labview[1] 'S' and labview[1] 'D' } // end if i>=3
39
//Läser av RS232. void Read_RS232(void){ if(kbhit()){ sign = getchar(); } if(sign != 0){ putc(sign); labview[i]=sign;if((i>=4) && (Labview[0]=='M' || Labview[0]=='m')){ Call_Unit();
PUTC('&'); i=0;
}else if((i>=2) && (Labview[0]=='I' || Labview[0]=='i')){ Call_Unit();
PUTC('&'); i=0;
}else if((i>=2) && (Labview[0]=='U' || Labview[0]=='u')){ Call_Unit(); PUTC('&'); i=0; }else if(i>=4){ PUTC('&'); i=0; }else{ i++; } } sign = '\0'; }
void Print_RS232(char *vector){ //Skriver strängar till RS232. int i = 0;
while(vector[i]!= '\0' ){ putc(vector[i++]); }
}
void pwm(int Duty_Left, Duty_Right){ Duty_Left=Duty_Left;
Duty_Right=Duty_Right;
setup_timer_2(T2_DIV_BY_1,51,2); //Sätter upp Timer 2 för få rätt PWM. set_pwm1_duty(Duty_Left); //PWM signal för Vänster motor
set_pwm2_duty(Duty_Right); //PWM signal för höger motor. }
40
void Set_Speed(byte Left_Dir,Right_Dir){ pwm(LeftSpeed,RightSpeed); if (Right_Dir==1){ output_High(PIN_C0); output_Low(PIN_C3); }else{ output_Low(PIN_C0); output_High(PIN_C3); } if (Left_Dir==1){ output_High(PIN_C4); output_low(PIN_C5); }else{ output_Low(PIN_C4); output_High(PIN_C5); } }
//Read AD-Channels and print it on LCD. byte read_analog(byte Channel){
int Analog_Value;
SET_ADC_CHANNEL(Channel); //Tar emot värde för vilken ingång som ska läsas av. analog_value = read_adc(ADC_START_AND_READ); //Läser av ingången.
return Analog_Value; }
//UltraSoic, Triggar på D0 och läser på D1 int UltraSonic(Void){
long temp=0,temp2=1; long Distance=0; output_high(PIN_D0);
delay_us(10); //Måste vara minst 10us. output_low(PIN_D0);
start =0; temp2=1; temp=0; start=0;
while(!input(PIN_D1)); //Stannar här tills det inte finns någon signal på US. set_timer1(0); //Nollställer timer1
while(input(PIN_D1)); start=1;
Distance = get_timer1(); //läser av Timer värdet.
Distance=Distance/58; //Räknar om tiden till cm skalfator 58 vid 4MHz 300 vid 20MHz. Distance=(int)Distance; //Omvandlar long till Integer.
Return Distance; }