VTl meddelande
Nr 686 - 1993
Hur bra kan man prediktera olyckor med fotgängare och cyklister i korsningar?
VTl meddelande
Nr 686 - 1993
Hur bra kan man prediktera olyckor med fotgängare och cyklister i korsningar?
Ulf Bräde och Jörgen Larsson
- Väg- och
Utgivare: Publikation:
VTI MEDDELANDE 686 Utgivningsår: Projektnummer:
1993 71028-5 Väg- och transport- Projektnamn:
Aforskningsinstitutet Regressionseffekt, metodutveckling samt 581 95 Linköping några försök till praktisk tillämpning
Författare: Uppdragsgivare:
Ulf Bräde och Jörgen Larsson Statens väg- och transport-forskningsinsitut(VTT)
Titel:
Hur bra kan man prediktera olyckor med fotgängare och cyklister i korsningar?
Referat (bakgrund, syfte, metod, resultat) max 200 ord:
Förklaringsvärdet RZ, d.v.s. den kvadrerade korrelationskoefficienten mellan observerade och anpassade värden, utgör ett mått på hur bra en modell predikterar t.ex. antalet olyckor.
I studien redovisas prediktionsmodeller för olyckor med fotgängare och cyklister i korsningar. Dessutom görs jämförelser mellan faktiskt erhållna R*-värden och maximala förklaringsvär-den, beräknade såväl teoretiskt som med hjälp av simulering.
Publisher: Publication:VTI MEDDELANDE 686 Published: Project code:
Swedish Road and 1993 71028-5
f ' s
u
Twiåpgrt 2:95 , Institute
Project Regression-to-the-mean, method
S-581 95 Linköping Sweden
development and practical applications
Author:
' Sponsor:
Ulf Bräde and Jörgen Larsson
Swedish Road and Transport Research
Institute
Title:
Prediction models for accidents at junctions where pedestrians and cyclists are
involved. How well do they fit?
Abstract (background,aims, methods, results) max 200 words:
The coefficient ofdetermination, RZ, i.e. the squared correlation coefficient between observed and
fitted values, constitutes a measure indication how well a model predicts data such as the number
of accidents.
The study describes prediction models for accidents involving pedestrians and cyclists at
junctions. In addition, comparisons are made between actual R values obtained and maximal R?
values, calculated both theoretically and with the aid of simulation.
FÖRORD
Arbetet utgör en utvidgning av ett projekt som VTI genomfört på uppdrag av Vägverket. Finansiering har skett med VTIs egna FoU-medel.
Ulf Bräde har varit projektledare och ansvarat för uppläggningen av arbetet, den statistiska analysen och rapportskrivningen. Allt har skett i samarbete med Jörgen Larsson som dessutom haft hela ansvaret för databearbetningen.
Värdefulla synpunkter och förslag till bearbetning har erhållits av Mats Wiklund, VTI och Stig Danielsson, Linköpings universitet.
INNEHÅLLSFÖRTECKNING
Sid
SAMMANFATTNING I
1 INLEDNING 1
2 PREDIKTIONSMODELLER, DATA OCH METOD 2
3 FORMLER FÖR PREDIKTIONSMODELLERNA 3
4 ÖVERSIKTLIG "RESIDUALANALYS" 8
& PREDIKTIONSMODELLERNAS FÖRKLARINGSVÄRDEN 9
6 SAMBAND MELLAN PREDIKTERADE VÄRDEN OCH 11 SKATTADE VÄNTEVÄÅRDEN
7 MAXIMALA FÖRKLARINGSVÄRDEN, SIMULERADE 13 OCH TEORETISKA
8 NORMERADE FÖRKLARINGSVÄRDEN? 17
9 SLUTSATSER 18
10 REFERENSER 19
BILAGA 1: Olyckor med fotgängare inblandade
SAMMANFATTNING
Ofta används förklaringsvärdet RZ, d v s den kvadrerade korrela-tionskoefficienten mellan observerade och anpassade värden, som ett mått på hur bra en modell predikterar antalet olyckor i t ex korsningar.
Syftet med denna studie är att visa att RZ-värden, som erhålls i olika undersökningar, sällan är jämförbara med varandra. Och vidare att en prediktionsmodell kan vara "nästan perfekt" även om förklaringsvärdet är lågt. Ett annat syfte är att presentera några ur praktisk synpunkt intressanta resultat avseende fot-gängare- och cykelolyckor.
Empiriskt erhållna förklaringsvärden för prediktionsmodeller, avseende olyckor i korsningar med fotgängare eller cyklister inblandade, jämförs med hur stora förklaringsvärden som maximalt skulle kunna erhållas. De senare kan beräknas såväl teoretiskt som med hjälp av simulering. Teoretiskt visas också hur maximala förklaringsvärdet beror på genomsnittliga olycksnivån och in-bördes spridningen för de studerade korsningarnas väntevärden.
Erhållna resultat visar hur svårt det kan vara att bestämma om och i så fall hur mycket som ytterligare faktorer (utöver trafikflödena), vilka mera i detalj beskriver utformningen, på-verkar antalet olyckor.
1 INLEDNING
Under årens lopp har flera försök gjorts att bilda modeller för att prediktera antal olyckor i korsningar eller på sträckor. Gemensamt är att trafikflödena, i en eller annan form, ingår i modellerna. Och trots att trafikflödena ofta är grovt skattade är de ofta de mest olycksförklarande faktorerna. Åtminstone sedan indelning gjorts efter korsningstyp - d v s enklare kors-ningar, signalreglerade korsningar, cirkulationsplatser och planskilda korsningar eller efter vägtyp - t ex tvåfältig väg, motortrafikled och motorväg samt efter tillåten hastighet.
Som ett mått på hur bra modellerna är, används ofta det s k för-klaringsvärdet RZ, d v s den kvadrerade korrelationskoefficien-ten mellan observerade och anpassade värden. Andra förekommande mått på hur god anpassningen är behandlas inte i denna rapport.
Ibland kan man läsa att den ena modellen är bättre än någon annan modell, i en annan undersökning, p g a att förklarings-värdet är högre. Ibland konstateras att en modell inte är sär-skilt bra eftersom förklaringsvärdet är lågt, kanske "bara" 0,30. I vissa studier har RZ-värdet beräknats med enskilda korsningar som observationsenheter medan i andra studier kan grupper av vägsträckor utgöra observationsenheterna.
Avsikten med denna artikel är att illustrera att en prediktions-modell kan vara mycket bra även om förklaringsvärdet är lågt. Vidare att förklaringsvärden, som erhålls i olika studier van-ligtvis inte är jämförbara med varandra p g a olika långa under-sökningsperioder, olika nivåer på olycksantalet eller olika spridning på det förväntade olycksantalet i de studerade obser-vationsenheterna. Endast fallet där man har naturliga enskilda observationsenheter behandlas här. Även en del ur praktisk syn-punkt intressanta resultat presenteras.
2 PREDIKTIONSMODELLER, DATA OCH METOD
De prediktionsmodeller som här redovisas avser olyckor i en-skilda korsningar med fotgängare respektive cyklister in-blandade .
Data har insamlats från ett 30-tal svenska kommuner, alltifrån kommuner med ca 25 000 invånare till de allra största som Göteborg och Stockholm. Samtliga korsningar ligger på huvud-nätet. Utformningen varierar från mycket enkla korsningar till korsningar med trafiksignaler eller cirkulationsplatser. Olycks-materialet avser polisrapporterade olyckor 1983-1988.
Endast korsningar med 2 100 fotgängare respektive 2 100 cyklis-ter per årsvardagsdygn har medtagits. Räkningar av antalet oskyddade trafikanter har i regel skett under enstaka vardag på våren eller hösten. Årsvardagsdygnstrafiken har skattats som
5 +- (antal kl 7-8 + antal kl 16-17).
En fotgängare som utnyttjar två övergångsställen (faktiska eller tänkta) räknas dubbelt. På samma sätt räknas en cyklist som ut-nyttjar två cykelöverfarter dubbelt. Däremot räknas en i kör-banan inkommande cyklist endast en gång. Det sistnämnda för-farandet är naturligtvis inte helt invändningsfritt.
Vid bildandet av prediktionsmodeller har för fotgängarolyckor utnyttjats 285 korsningar med 165 olyckor och för cykelolyckor 377 korsningar med 432 olyckor.
Den statistiska teknik som använts har varit minsta-kvadrat-anpassning med hjälp av proceduren NLIN i statistikpaketet SAS och med olyckskvot som beroende variabel. (Vi har också prövat programvaran med antal olyckor som beroende variabel, och då erhållit i stort sett samma resultat.)
3 FORMLER FÖR PREDIKTIONSMODELLERNA
För olyckor med fotgängare inblandade har erhållits att antalet olyckor med fotgängare inblandade per miljon passerande fot-gångare
FOLKVOT = 0,0201 - TOTINKÖ/5© - TOTFOTG7-©/ 28 (1)
där TOTINK och TOTFOTG är lika med antal inkommande motorfordon per årsdygn respektive passerande fotgängare per årsvardagsdygn.
Årliga antalet olyckor med fotgängare inblandade erhålls då som FOLKVOT + 365 - TOTFOTG! / 10%, d v s
FOLPERÅR = 0,00000734 +- TOTINKÖ/50© - TOTFOTGO. 72 (2)
(Omvänt kan FOLKVOT uttryckas som FOLPERÅR / 365 / TOTFOTG! - 108.)
För olyckor med cyklister inblandade har följande erhållits
COLKVOT = 0,0494 +- TOTINKÖ/9Z2 +- TOTCYK7©, 35 (3)
och
COLPERÅR = 0,0000180 +- - 65 (4)
Helt väntat antar exponenterna, i formlerna för och COLPERÅR, värden mellan 0 och 1. I båda fallen är exponenterna för antal oskyddade större än för antal motorfordon.
Notera att i formlerna för FOLKVOT och COLKVOT är exponenterna för TOTFOTG och TOTCYK negativa. Exponenterna för TOTINK är för-stås positiva och desamma som för FOLPERÅR och COLPERÅR.
I ord innebär ovanstående samband att både FOLPERÅR och COLPERÅR ökar med såväl antalet motorfordon som antalet oskyddade trafi-kanter (se figur 1 och 2). Mera intressant är att risken, antal
olyckor med oskyddade per oskyddad d v s FOLKVOT och COLKVOT, ökar med antalet motorfordon men minskar med antalet fotgängare respektive cyklister (se figur 3 och 4). Detta skulle till stor del kunna förklaras av att ju fler bilar desto fler som kan komma i konflikt med fotgängarna eller cyklisterna. Och ju fler fotgåän-gare och cyklister desto fler "levande varningsmärken" och större hänsynstagande från bilisterna. En ytterligare förklaring, i det senare fallet, bör förstås vara att ju fler oskyddade desto mera "GC-utformning". Men då bör påpekas att även storleken på antalet bilar påverkar hur vanligt det är med GC-åtgärder.
En annan intressant iakttagelse är att risken för olycka (med angivet sätt att definiera densamma) är ungefär dubbelt så stor för cyklister som för fotgängare. Det skall då dock nämnas att singelolyckor med fotgängare inte rapporteras av polisen eftersom de inte definieras som vägtrafikolyckor. Dessutom gäller att fot-gängare-cyklistolyckor (ett litet antal) bara räknas som cykel-olyckor. Om hänsyn skulle tas till bortfallet, p g a den bris-tande polisrapporteringen, skulle olycksantalen ungefärligen fördubblas för såväl fotgängarna som cyklisterna.
I tabellerna 1 och 2 redovisas dels hur korsningarna totalt för-delar sig efter antal motorfordon och antal fotgängare respektive cyklister, dels hur delmängden korsningar med GC-signaler förde-lar sig på samma sätt. Sambandet mellan förekomst av GC-signaler och flödesstorlek är som synes starkt.
Ur praktisk synpunkt är resultaten intressanta och till att börja med kanske lite svårtolkade eller svårsmälta. De korsningar som har lägst GC-risk, d v s lägst FOLKVOT eller COLKVOT (givet visst antal motorfordon), är de korsningar som har störst GC-flöden. Detta är dock samtidigt sådana korsningar där det inträffar många GC-olyckor just p g a att exponeringen av antalet oskyddade är stort. Det torde därför vara maximalt kostnadseffektivt att "samla ihop" fotgängarna och cyklisterna i ett mindre antal kors-ningar med hög GC-standard (och inte alltför stor biltrafik). Rent praktiskt kan dock detta förstås vara svårt att uppnå.
0.50 0.72 FOLPERÅR = 0.00000734*TOTINK * TOTFOTG
Fotgangarolyckor per är Tot. inkom.
1.5 === === === ========p======================-=--- motorford. ; t : per dygn ' i 40000 e a r ri 30000 i : 25000 i i 20000 t | 15000 $ : 10000 0 S Tr mmm nt > 7 LA Lp Se 7 7 ss m m m m m 7 7 7 y semen m m mm m= 71 i f ! 5000 i i 2500 0 0 r n n ' t r j [0 & 10
Tot. passerande fotgängare (tusental) per dygn
Figur 1
c 0.52 0.65
COLPERAR = 0.0000180+TOTINK » TOTCYK
Cykelolyckor per år Tot. inkom.
1.5 ; motorford.
- : per dygn
Tot. passerande cyklister (tusental) per dygn
0.50 -0.28 FOLKVOT = 0.0201*TOTINK * TOTFOTG
Tot. inkom 2,5 === m mmm me mmm m mm m m mm nm mm mm mm mm mm mm m n m m n m m m mm mm mm mm mmm m=»: motorford. i t : per dygn o ennen nn === === === =======: 2 e
;
1.
a
0.5 -
J
eei
i
--40000
& t i 20000 - - - 10000 0.0 # i u i 2500 0 5 10Tot. passerande fotgängare (tusental) per dygn
Figur 3
0.52 -0.35
COLKVOT = 0.0494*TOTINK * TOTCYK
COLKVOT Tot. inkom.
2,5 mm mmm === mm motorford. 7 per dygn -- 2500 1 0 5
Tot. passerande cyklister (tusental) per dygn
där fotgängarolyckor analyserats. Antal korsningar totalt respektive med GC-signal.
Korsningar Tabell i
per dygn Antal inkom. motorford.
! 47500 132500 127500 122500 8 ! 16 e 13 5 117500 6 ! 27 1 16 15 6 ! 12500 4 ! 16 7 1 39 1 23 13 8 5 ! 7500 1 1 22 1 24 4 1! 2500 250 750 1250 3750 6250 13750 16250 100
Antal passerande fotgängare per dygn
Antal analyserats.
cykelolyckor där
korsningar totalt respektive med GC-signal. Korsningar
Tabell 2
per dygn Antal inkom. motorford.
1 i ! 47500 1 32500 1 27500 2 ( 12 11 2 122500 9 1 16 12 f 12 2 (1 13 10 117500 1 1 17 16 ! 16 3 1 29 t 10 9 ! 12500 11 ! 27 13 ! 34 2 1 43 t 10 4 ! 7500 5 1 14 0 ! 37 1 18 1 ! 17 1 ! 2500 250 750 1250 3750 6250 13750 16250 100
4 ÖVERSIKTLIG "RESIDUALANALYS "
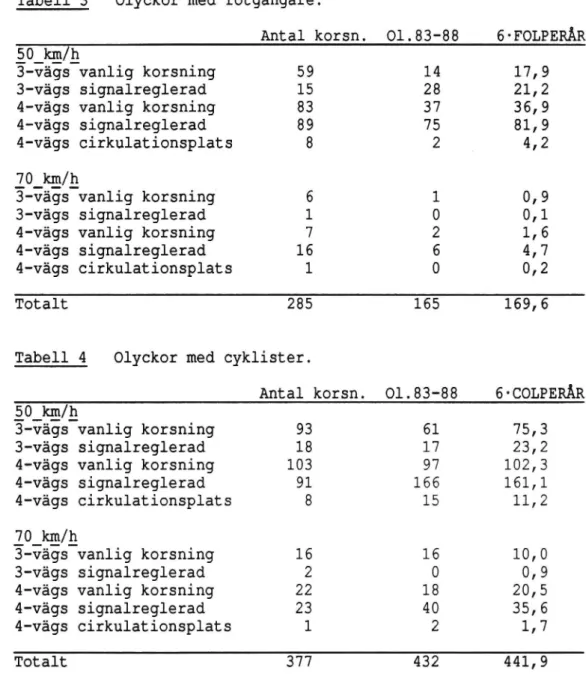
I tabellerna 3 och 4 jämförs översiktligt observerat och predik-terat antal olyckor för grupper av korsningar med uppdelning ef-ter hastighetsgräns och korsningstyp. Avvikelserna är omväxlande positiva och negativa och uppvisar inget systematiskt mönster.
Det är olyckligt att antalet cirkulationsplatser i det under-sökta materialet är så litet. Det är nämligen en mycket omtvis-tad fråga hur bra eller inte bra ur trafiksäkerhetssynpunkt som cirkulationsplatser är med tanke på de oskyddade trafikanterna.
Tabell 3 Olyckor med fotgängare.
Antal korsn. _01.83-88 6 © FOLPERÅR 50_km/h 3-vägs vanlig korsning 59 14 17, 9 3-vägs signalreglerad 15 28 21 , 2 4-vägs vanlig korsning 83 37 36,9 4-vägs signalreglerad 89 75 81,9 4-vägs cirkulationsplats 8 2
.
4 , 2
70_km/h
3-vägs vanlig korsning
6
1
0 , 9
3-vägs signalreglerad
1
0
0 , 1
4-vägs vanlig korsning
7
2
1,6
4-vägs signalreglerad
16
6
4 , 7
4-vägs cirkulationsplats
1
0
0 , 2
Totalt
285
165
169,6
Tabell 4
Olyckor med cyklister.
Antal korsn.
_01.83-88
6 : COLPERÅR
50_km/h
3-vägs vanlig korsning
93
61
75, 3
3-vägs signalreglerad
18
17
23 , 2
4-vägs vanlig korsning
103
97
102,3
4-vägs signalreglerad
91
166
161,1
4-vägs cirkulationsplats
8
15
11,2
20_km/h
3-vägs vanlig korsning
16
16
10,0
3-vägs signalreglerad
2
0
0 , 9
4-vägs vanlig korsning
22
18
20,5
4-vägs signalreglerad
23
40
35,6
4-vägs cirkulationsplats
1
2
1,7
Totalt
377
432
441 , 9
5 PREDIKTIONSMODELLERNAS FÖRKLARITNGSVÄRDEN
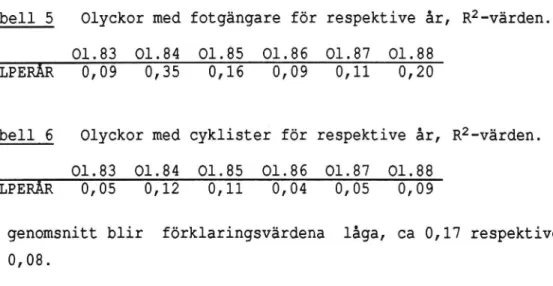
Om FOLPERÅR och COLPERÅR används för att prediktera de årsvisa olycksutfallen 1983,...,1988 erhålls följande RZ-värden (kvadre-rade korrelationskoefficienter) :
Tabell 5 Olyckor med fotgängare för respektive år, R?-värden.
01.83 01.84 01.85 01.86 01.87 01.88 FOLPERÅR ___0,09 0,35 0,16 0,09 0,11 0,20
Tabell 6 Olyckor med cyklister för respektive år, R2-värden.
01.83 01.84 01.85 01.86 01.87 01.88 COLPERÅR ___0,05 0,12 0, 11 0,04 0,09
I genomsnitt blir förklaringsvärdena låga, ca 0,17 respektive ca 0,08.
Om vi i stället beräknar RZ-värdena för hela perioden 1983-1988, d v s den period som använts för att ta fram prediktionsmodell-erna, erhålls de förklaringsvärden som vanligtvis redovisas. Som framgår av tabell 7 ökar RZ-värdena då till 0,46 respektive 0,31.
Tabell 7 Olyckor under hela perioden 1983-1988, RZ-värden.
01.83-88 6 - FOLPERÅR 0 , 46 6 - COLPERÅR 0,31
Om man fortfarande studerar hela perioden 1983-1988 men gör separata beräkningar av RZ-värdena för de 50 % av korsningarna som har lägst antal predikterade olyckor respektive de 50 % som har högst antal predikterade olyckor blir förklaringsvärdena mindre. Detta gäller framför allt för de förstnämnda kors-ningarna.
10
Tabell 8 Olyckor under hela perioden 1983-1988 för delgrupper, RZ-värden.
01 . 83-88 Lägsta pred. olycksantal, 6: FOLPERÅR 0 , 02 Högsta pred. olycksantal, 6: FOLPERÅR 0 , 45 Lägsta pred. olycksantal, 6: 0 , 04 Högsta pred. olycksantal, 6: COLPERÅR 0 , 20
Några riktigt höga korrelationer kan man sällan vänta sig då den enskilda korsningen utgör observationsenhet och då man har att göra med slumpvariabler typ inträffade olyckor. Särskilt inte vid lägre olycksnivåer, då den relativa osäkerheten blir sär-skilt stor.
Även om man lyckades prediktera exakt riktiga väntevärden, så gäller p g a olyckornas slumpmässighet, att det aldrig kan bli perfekt överensstämmelse mellan observerade och predikterade
(anpassade) värden.
I bilaga 1 och 2 redovisas korsning för korsning observerade och predikterade olycksantal sett över hela perioden 1983-1988, dels för olyckor med fotgängare och dels för olyckor med cyklister.
Det framgår t ex att det finns 40 korsningar där, avrundat till en decimal, antalet fotgängarolyckor predikteras till 0,1. I 34 av dessa är observerade olycksutfallet noll och i 6 har det in-träffat en olycka. Enligt den teoretiska poissonfördelningen gäller att för väntevärdet m lika med 0,1 skulle det ha inträf-fat noll olyckor i 36 av korsningarna och en eller flera olyckor i 4 korsningar. En liknande god överensstämmelse kan i stort sett genomgående noteras.
11
6 SAMBAND MELLAN PREDIKTERADE VÄRDEN OCH SKATTADE VÄNTEVÄRDEN
Genom att väga samman observerat och predikterat olycksantal enligt följande
f = pred + (a-pred/(1 + a-pred)) * (obs - pred) (5)
erhålls en skattning av det "sanna" (förväntade) antalet olyckor m [Bräde och Larsson, 1988].
"a" i formel (5) kan erhållas med hjälp av s k korsvalidering [Junghard, 1990]. I svenska korsningsstudier, avseende samtliga polisrapporterade olyckor, har "a" vanligtvis hamnat i inter-vallet 0,10 - 0,30. Dessutom har konstaterats att värdet är täm-ligen robust i den meningen att det inte har så stor betydelse om man väljer a = 0,10, 0,20 eller 0,30.
För det här aktuella olycksmaterialet avseende fotgängarolyckor och cykelolyckor har a-värdena 0,29 respektive 0,08 erhållits.
I bilaga 1 och 2 redovisas förutom observerade och predikterade värden även m-skattningarna för respektive korsning. Genomgående ligger de senare mycket nära predikterade värden. Detta framgår också då man beräknar de kvadrerade korrelationskoefficienterna mellan predikterade olycksantal och m-skattningarna, som blir lika med 0,90 och 0,95 för olyckor med fotgängare respektive cyklister.
Tabell 9 Kvadrerade korrelationskoefficienter.
f 83-88
6 - FOLPERÅR 0 ,; 90 6 - COLPERÅR 0 , 95
12
Egentligen är det ju just modellernas förmåga att prediktera de (ej observerbara) väntevärdena som man är intresserad av. Ovan-stående resultat pekar på att prediktionsmodellerna i detta av-seende är näst intill perfekta. Det är dock naturligt att komma med invändningen att m-skattningarna utgör en funktion av pre-dikterade värden och att detta är förklaringen till att de kvad-rerade korrelationskoefficienterna ligger så nära 1.
13
7 MAXIMALA FÖRKLARINGSVÄRDEN, SIMULERADE OCH TEORETISKA
Man kan undersöka vad som händer om man för varje enskild kors-ning antar att predikterat värde är lika med det riktiga vänte-värdet och sedan simulerar antal olyckor (under antagande om Poissonfördelning). Tio sådana simuleringar har gjorts för var-dera fotgängarolyckor och cykelolyckor avseende perioden 1983-1988. De kvadrerade korrelationskoefficienterna mellan antagna väntevärden och simulerade värden visar hur stora RZ-värden man maximalt kan erhålla för framtagna prediktionsmodeller.
Tabell 10 Kvadrerade korrelationkoefficienter.
Sim. o1.83-88
1 2 K 4 5 6 7 8 9 10
6 - FOLPERÅR 0; 49 0,49 0,49 0,36 0,56 0,53 0,50 0,39 0,56 0,48
6 - COLPERÅR 0; 44 0,38 0,32 0,34 0,34 0,42 0,48 0,42 0,49 0,37
I genomsnitt blir de kvadrerade korrelationskoefficienterna 0,49 respektive 0,40. Enligt tabell 7 erhölls de kvadrerade korrela-tionskoefficienterna 0,46 respektive 0,31 mellan predikterade och observerade värden. Skillnaden är påfallande liten, särskilt vad gäller fotgängarolyckor. Det är också intressant att notera att de kvadrerade korrelationskoefficienterna kan variera ganska kraftigt vid olika simuleringar.
De maximala förklaringsvärdena torde dessutom vara något över-skattade eftersom dels antalet olyckor i enskilda korsningar antagligen har en något större spridning än vad Poissonfördel-ningen anger och dels bortfallet i polisens rapportering varie-rar mellan olika kommuner.
Å andra sidan skall det förstås framhållas att samma datamängd som har använts för att bilda prediktionsmodellerna även har använts för att jämföra predikterade och observerade olycks-antal.
14
De maximala förklaringsvärdena kan också härledas och beräknas teoretiskt.
Låt X beteckna predikterat antal olyckor och antag att vänte-värdena för de enskilda korsningarna helt överensstämmer med predikterade värden.
Låt vidare Y beteckna observerat antal olyckor.
Sett över alla studerade korsningar har X en fördelning med väntevärde E(X) och varians V(X) .
För en viss given korsning med X=x antages att Y är Poisson-fördelad med väntevärde E(Y[X=x)=x och varians V(Y[X=x)=x.
Sett över alla korsningarna gäller då att
E(Y) = E(E(Y/X)] = E (X)
E(XY) = E(E(XY[X)] =
E[XE(Y|X)] = E (X2)
V(Y) = E[V(Y[X)] + V[E(Y][X)] = E(X) + V (X)
=>
Korr (X,Y) = Kov (X,Y) _ E(XY) - E(X]E(Y) _
E(X2) - EZ (X)
sv (x) V(3)
yV (%) V (3)
vv (x) [E (X) +V (%) ]
V (X)
yv (X) [E (X) +V (%) ]
15
vilket innebär att det teoretiskt maximala förklaringsvärdet ökar med ökad spridning i de studerade korsningarnas predikte-rade olycksantal. Måttet blir också större ju större variansen i de predikterade värdena är i förhållande till medelvärdet av de predikterade värdena.
I tabell 11 redovisas medelvärde och varians för korsningarnas predikterade olycksantal samt Korr2(X,Y), dels för samtliga korsningar och dels för delgrupperna med lägsta respektive högsta antal predikterade olyckor.
Tabell 11 :
pred. antal olyckor (X)
medelvärde varians Korr2 (X, Y)
Fotgängarolyckor_
samtliga korsningar 0 ,; 5931 0 ; 5890 0; 50 korsn med lägsta pred 0 ; 2016 0 ; 0062 0 ; 03 korsn med högsta pred 0 ; 9818 0 ; 8664 0 , 47
Cykelolyckor_
samtliga korsningar 1, 1724 0 , 7009 0; 37 korsn med lägsta pred 0 ,; 5899 0, 0514 0 ; 08 korsn med högsta pred 1 , 7519 0 ; 6739 0 ; 28
Sett över samtliga korsningar är som väntat överensstämmelsen mycket god med de simulerade resultaten enligt tabell 10 men också med resultaten enligt tabell 7 och 8.
Man kan lätt se vad som skulle hända med maximala teoretiska förklaringsvärdet Korr2 (X,Y) om undersökningsperiodens längd t ex halverades, dubblerades, gjordes fem eller tio gånger större. Om man i formeln för Korr2(X,Y) ersätter X med kX, där k anger den alternativa periodens längd erhålls
V (kX) _ k2ZV (X) - kE(X) + kZV (X)
Korr? (kX, Y) =- E(kX) + V(kX) (7)
som är större eller mindre än Korr?(X,Y) beroende på om k är större eller mindre än 1.
16
Tabell 12 Korr?(kX,Y) för olika värden på k.
Korr2 (kX, Y) Fotgängarolyckor_ k = 0 7 5 0 7 33 k = 1 0 ; 50 k = 2 0 ; 67 k = 5 0 , 83 k = 10 0, 91 Cykelolyckor_ k = 0,5 0,23 k = 1 0 , 37 k = 2 0 , 54 k = 5 0 ; 75 k = 10 0 ; 86
En ändring av undersökningsperiodens längd, och därmed även olycksnivån och spridningen i väntevärdena, påverkar som synes mycket starkt det maximala förklaringsvärdet .
17
8 NORMERADE FÖRKLARINGSVÄRDEN?
Finns det något bra sätt att mera rättvist jämföra olika predik-tionsmodellers förklaringsvärden? Något som t ex är jämförbart med variationskoefficienten _(standardavvikelsen dividerad med medelvärdet), som ibland används för att jämföra spridningen i olika material? Skulle det vara tänkbart att normera det erhåll-na förklaringsvärdet genom att dividera med det teoretiskt maxi-mala förklaringsvärdet? Detta är några frågor som man kan ställa
18
9 SLUTSATSER
Resultaten visar att även med en enkel modellansats och enkla årsdygnsskattningar av antal motorfordon och antal oskyddade trafikanter är det möjligt att erhålla "nästan perfekta" model-ler för att prediktera antal olyckor med fotgängare eller cyk-lister. Detta trots att erhållna RZ-värden, de kvadrerade korre-lationskoefficienterna mellan observerade och anpassade värden, kan vara mycket låga.
Såväl simuleringar som teoretiska beräkningar kan användas för att beräkna maximala förklaringsvärdet för en prediktionsmodell. Det maximala förklaringsvärdet beror på genomsnittliga nivån och inbördes spridningen för de studerade korsningarnas väntevärden.
Enligt erhållna resultat gäller att risken, antal olyckor med oskyddade trafikanter per oskyddad trafikant, ökar med antalet motorfordon men minskar med antalet fotgängare respektive cyk-lister. Det skulle därför kunna vara bra ur trafiksäkerhets-synpunkt att om möjligt "samla ihop" fotgängarna och cyklisterna i ett mindre antal korsningar med hög GC-standard och lite bil-trafik.
Risken för olycka är ungefär dubbelt så stor för cyklister som för fotgängare vid jämförbara trafikflöden.
Resultaten ger också en fingervisning om hur svårt det kan vara att bestämma om och i så fall hur mycket som ytterligare fak-torer, vilka mera i detalj beskriver utformningen, påverkar antalet olyckor. Dels p g a det faktum att trafikflödena i så hög grad förklarar den systematiska variationen i antalet olyckor och dels det starka sambandet mellan trafikens storlek och förekomsten av t ex GC-signaler.
19
10 REFERENSER
Bräde U och Larsson J: The Use of Prediction Models for Elimi-nating Effects due to Regression-to-the-Mean in Road Accident Data. Accident Analysis & Prevention, Vol. 20, No 4, 1988.
Junghard 0: Linear Shrinkage in Traffic Accident Models and their Estimation by Cross Validation and Bootstrap Methods. Linköping Studies in Science and Technology, Thesis No 205, 1990 .
Sid 1 (1) Bilaga 1
OLYCKOR MED FOTGÄNGARE INBLANDADE
Antal f 83-88 83-88 korsningar Ol 6 - FOLPERÅR Antal f 83-88 83-88 korsningar O1 6 © FOLPERÅR m m 4 4 4 285 I'm O m) CO N j = Em än IR Sn Hl l WN m TI T -m jO pd QN N In mM ji n v-4 [LOv-4 Mm m LD [D m j o m R R i MÅ d Mm) TI I # [ -/ LOv-1 1 4 6 w 6 2 5 3 2 7 7 2 6 3 1 0 4 2 1 6 2 1 1 6 2 1 2 2 3 4 1 1 4 1 1 1 4 2 1 1 2 1 1 1 1 1 1 1 1 1 2 2 1 2 1 1 1 1 O ) (M ) v4 v-4 v-1 © u -m N N m m u 5 u n © = D O I n m o m W 0 0 d m v m o r a o n a n -A H 4 A N In o H o m t o a H H in in O T* fm in © m o m m m 2600 200 2200 M 2000 M Me M 00 226000 2 9 ih M i ih I h M MR M IR IR M i Mn IG I i h M i i i i in i i i, i i d i i i ii R l in l i i d d 0 0 0 0 0 0 0 0 0 0 0 0 O O H O 0 O H O 0 O H O O H O 9 O H H H O H O H H N H H H H N H H H H H H N H M 4 ** 0 O 4 0 4 N O M N O H N O Å A T O M N I n N O H N M O H N O H O H N I N O M O HM N O H N M N T O m Nä m T O H O O H H N O in O i n © 41 i N N N m m m © = == In) In) In) ( D ( D ( D D -M -o o o ä ) 0 0 0 4 4 N N N m m m m m =-= = = == In ID L D -0 0 © un -C O -mo m m m m M 200 200 260 2600 M M M M M M M M M M M RG M Mn i i i ih M ih M MG M M M i i M Mn, in in i M R G R i i i i d d d R d d d ds 0 0 0 0 0 0 0 0 0 0 O O O S m m m m m m m -m R -H 4 H 4 NO N N N m VTI MEDDELANDE 686
Sid 1 (1) Bilaga 2
OLYCKOR MED CYKLISTER INBLANDADE
Antal fi 83-88 83-88 korsningar O1 Antal f 83-88 83-88 korsningar O1 6 - COLPERÅR 6 + COLPERÅR ' C) I'm A O In fm 00 O 4 10 0D m I-00 O m in D 4 = D 00 Oo N m In 4 WN 9 m in T W D ID 1 (D (D 00 N in in 9 00 = to u f D 00 o m m m i l m m m m 8 M 9 m 9 m 2 m m M m M M M M m Mm M i i i M RG 2000 M M M M M M M M M M M M M R M MG RG M % M MG i MR M M cc ä 1 1 2 1 1 1 2 2 1 1 2 1 1 2 2 2 1 2 2 2 1 2 2 2 2 2 2 2 2 2 2 2 2 2 3 2 2 2 2 2 3 3 2 3 4 4 2 4 3 4 4 4 3 5 M kl 2 3 4 0 1 2 3 4 0 1 3 0 1 2 4 5 1 2 4 5 0 1 2 3 4 1 2 4 2 3 5 1 3 2 5 2 2 3 0 1 5 7 2 4 8 9 0 6 3 3 4 4 1 4 3 T m-im i m o 0 0 0 0 A A A O 0 0 0 0 4 d 4 4 N N N N N m m m s e s n n D D n-0 0 a d o o -N T* n -o 4 I+ + in o q q | o mo m R M m M M M M M m M M M M M 2 ih M M M M MG M IR ih i M i i M h i M M ih i IR i IR ir i 0 IR RG R i i i R i i i cl d 1 1 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 4 4 4 4 4 5 5 . * 1 1 5 2 8 4 4 6 1 1 7 7 4 5 0 3 2 6 5 1 1 7 7 3 6 7 4 1 2 6 4 2 1 7 3 2 9 7 2 4 1 6 5 3 5 2 3 4 2 1 6 4 2 1 1 4 2 2 v-714 v-4 9) v4 v-4 v-74 v-74 v-74 ri ri N WN m m = s in In) In In D U D u Mm Mm 4 4 0 4 A O M N M O H N H N O m S N m = in W = ID L D fm d o m = D Pm in P-00 t o mo m 26 26 M 200 2600 Me 200 2900 m M M M M 2 M ih 2 Mn i, ih R Mn Rh Mn Mn i IR G IR i in i ii i i in i ih i i i i d i i i d i i d i R l l d ds 0 0 0 0 0 0 0 0 O H © m a m m m m m m -m -k -Å 4 4 0 N O 4 0 4 0 m O 4 N O M N M m M m T O M N O M N M O M N M O H N M T n O 4 NH M H N M -rd ri N HN m m = * = = on n n D D D u I - I -o o d a d a d a 0 0 0 0 0 H H H N N N N m m m m = 5 * 5 1 =T In In In ID ( D (D ( D p-' , , , , " I I I I I I I I I I I I I I I , , , , " I I I I I I " I ' I ' I ' l ' l ' l ' l ' l ' l ' l ' l ' © 0 0 0 0 0 0 0 0 0 O O S m m m m m -m -k -m -H 4